






































































































































































































































































































































































































Author: Федосов Е.А.
Tags: техника средств транспорта авиация истребители военная авиация
ISBN: 5—7107—8418—4
Year: 2004

Text
АВИАЦИЯ И КОСМОНАВТИКА
АВИАЦИЯ
ПВО РОССИИ
И НАУЧНО-ТЕХНИЧЕСКИЙ
ПРОГРЕСС
Боевые комплексы и системы
вчера, сегодня, завтра
о рофа
Под редакцией академика
Е. А. Федосова
АВИАЦИЯ
ПВО РОССИИ
И НАУЧНО-ТЕХНИЧЕСКИЙ
ПРОГРЕСС
Боевые комплексы и системы
вчера, сегодня, завтра
d р о ф а
I
Москва 2004
УДК 629
ББК 13.4
ФЗЗ
Авторы:
В. К. Бабич, Л. Е. Баханов, Г. П. Герасимов, В. В. Гиндранков,
В. К. Гришин, Л. Б. Горощенко, В. С. Зинич, В. И. Карпеев,
В. Ф. Левитин, В. А. Максимович, Ю.Ф. Полушкин,
В. В.Слатин, Е. А. Федосов, Б. Е. Федунов, Л. Е. Широков
Рецензенты:
В. М. Кутахов, заместитель начальника Военного авиационного
технического университета им. проф. Н. Е. Жуковского;
А Т. Силкин, начальник 2-го Центрального НИИ Минобороны РФ;
С. А. Колядин, председатель научно-технического Комитета ВВС
Минобороны РФ
Авиация ПВО России и научно-технический прогресс: боевые комплексы
ФЗЗ и системы вчера, сегодня, завтра / Под ред. Е. А. Федосова. Монография. —
2-е изд., стереотип. — М.: Дрофа, 2004. — 816 с.: ил.
ISBN 5—7107—8418—4
В книге освещаются вопросы боевого применения истребительной авиации России
и научно-технические достижения в разработке образцов авиационной техники,
вооружения и авиационных систем.
Материалы книги имеют прикладной характер: в ней описаны конкретные
достижения, реализованные в авиационных комплексах перехвата и касающиеся
в первую очередь их боевого применения, боевых возможностей и интеллектуального
уровня борта в решении боевых задач. Книга написана коллективом ведущих
специалистов научно-исследовательских институтов и ОКБ России.
Книга рассчитана на научную общественность, специалистов, студентов и пре-
подавателей вузов, военных, а также на широкий круг читателей, интересующихся
техническими и научными вопросами истребительной авиации.
RUSSIAN AIR DEFENSE AVIATION: SCIENTIFIC
AND TECHNOLOGICAL ADVANCE
Combat complexes and systems yesterday, today, tomorrow
The problems of combat application of Russian fighter aviation and technological
advances in development of aviation engineering, arms and aviation systems are covered
in this book.
The materials of the book have applied nature. The particular achievements implemented
in aviation complexes of interception and mainly their combat application, combat
capabilities and onboard intellectual level in the solution of combat missions are described.
The book is written by a team of the leanding experts of research institutes and design
bureaus of Russia.
The book is intended for scientists,-experts, students and teachers of high schools,
military men, and also for a variety of people interested in technical and scientific problems
of fighter aviation.
УДК 629
ББК 13.4
ISBN 5—7107—8418—4
© ООО «Дрофа», 2004
Предисловие
Противовоздушная оборона состоит из комплекса мероприятий и боевых действий
по отражению нападения воздушного противника, защите центров и промышленно-
административных районов страны, важных объектов и группировок войск. Решение
этих задач возлагается на Военно-Воздушные Силы России.
Очевидно, что эффективное противодействие средствам воздушного нападения
в настоящее время и в ближайшем будущем должно базироваться на развитой сис-
теме противовоздушной обороны и ее мобильной составляющей - истребительной
авиации.
Потенциальные преимущества истребительной авиации заключаются в обеспече-
нии больших рубежей перехвата, возможности прикрытия больших площадей терри-
тории страны, высокой степени мобильности и реакции по наращиванию средств ПВО
для отражения угроз воздушного противника на наиболее опасных направлениях, что
весьма актуально для России. Истребители относятся к наиболее развивающемуся
классу боевых самолетов. Трудно перечислить все достижения в области аэродинами-
ки, самолетостроения, радиолокации, электроники и во многих других областях науки
и техники, воплощенные в конструкции и системах истребителя.
Следует согласиться с авторами книги, утверждающими, что от степени использо-
вания результатов научно-технического прогресса непосредственно зависят совершен-
ство авиационной техники и эффективность ее применения. На протяжении всей исто-
рии развития отечественной истребительной авиации научные, технические и техно-
логические достижения определяли уровень проводимых опытно-конструкторских
работ по созданию образцов авиационной техники и возможности принимаемых на
вооружение комплексов.
Глубокого обсуждения научно-технических разработок, проблем и тенденций раз-
вития истребительной авиации России в широких научных кругах открыто не прово-
дилось. Представляемая книга заполнит этот пробел. Внимание читателей будет со-
средоточено на боевом применении авиационных комплексов перехвата, на характе-
ристиках оборудования, на функциональных возможностях авиационных систем. Эти
аспекты впервые в открытой печати подверглись научному анализу, проведенному
коллективом авторов, непосредственно участвовавших в разработках отечественной
авиационной техники.
Предлагаемая книга отличается широтой охвата и глубиной рассмотрения научных
и технических проблем. В ней освещаются принципы, заложенные в боевые комплек-
сы и бортовые системы. Описана история создания авиационных комплексов перехва-
та, вооружения, средств обнаружения, наведения и управления. Рассказывается о раз-
работчиках этой техники, о вкладе ученых и конструкторов в ее совершенствование.
Читателям предоставляется возможность ознакомиться с техническими характеристи-
ками самолетов, бортового специального оборудования, вооружения, автоматизиро-
ванных систем управления боевыми действиями истребителей.
3
Рекомендуя предлагаемую монографию, полагаю, что она будет весьма полезна
при изучении основ боевого применения истребителей-перехватчиков, функциониро-
вания бортовых систем, а также при анализе развития боевой авиации и научных про-
блем создания высокоэффективных авиационных комплексов. Книга содержит боль-
шой объем справочно-информационного материала, который крайне необходим для
инженеров и военных специалистов.
Авторы создали книгу, необходимую и доступную широкому кругу читателей, ин-
тересующихся достижениями научно-технического прогресса в боевой авиационной
технике.
Главнокомандующий ВВС
генерал армии
a Корнуков
Развитие российской истребительной авиации
определяется научно-техническим прогрессом
Из отзывов рецензентов
Большие успехи в развитии авиации и расширяющееся ее использование вызывают
возрастание интереса к специальной научной и справочной литературе среди специа-
листов и многочисленных любителей авиации.
Предлагаемая вниманию читателей книга, созданная в Государственном научно-
исследовательском институте авиационных систем совместно с другими российскими
НИИ и КБ под научным руководством и редакцией академика Е. А. Федосова, уни-
кальна тем, что впервые в нашей стране подготовлено издание, охватывающее огром-
ный спектр вопросов - от развития способов боевого применения и организации бое-
вых действий авиации ПВО до научных и технических достижений и разработок но-
вейших комплексов наведения и перехвата.
Книга начинается с раздела о роли авиации в системе ПВО страны; убедительно и
логично показан вклад истребительной авиации в решение насущных задач противо-
воздушной обороны в послевоенный период. Обоснованно раскрываются проблемы
совершенствования организационной структуры, тактики и способов боевого приме-
нения истребительной авиации в решении сложнейших задач в различных условиях
обстановки. Представлена единая система управления авиацией ПВО на всех этапах
полета; описываются структура, назначение и состав технических средств; поднима-
ются вопросы взаимодействия авиационного комплекса с АСУ.
Приводятся общие научные и методические основы создания, развития и примене-
ния истребительной авиации; раскрываются методы исследования боевых возможностей
и эффективности комплексов перехвата. Заслуживает внимания то, что авторы книги не
только ставя! проблемы расширения боевых характеристик и повышения эффективно-
сти вооружения, но и показывают их решение в работах ГосНИИАС и других научных
организаций России; дается обоснование эффективности применения авиационных ком-
плексов. Наглядно, в полном объеме приведены характеристики и показана эволюция
требований к истребителям-перехватчикам. Заслужено и справедливо освещается роль
ОКБ нм. А. И. Микояна и ОКБ им. П. О. Сухого в создании авиации ПВО и в развитии
авиации России в целом. Показан рост боевых возможностей истребителей, диапазонов
высот и скоростей, зон возможных действий, параметров и характеристик вооружения, в
том числе по этапам развития авиации ПВО.
Книга весьма актуальна и своевременна, так как показывает и анализирует реаль-
ные боевые действия российских истребителей в локальных войнах и военных кон-
фликтах, о чем в открытой печати до недавнего времени было не принято рассказы-
вать, обобщает боевой опыт отечественной истребительной авиации.
В данном труде всесторонне рассмотрена реализация научно-технических дости-
жений на борту каждого типа современных и новейших авиационных комплексов пе-
5
рехвата. Приведенные сравнительные оценки возможностей нашей авиации с самоле-
тами ведущих мировых авиационных держав свидетельствуют о превосходстве нашей
авиационной техники над зарубежной по многим техническим параметрам и боевым
характеристикам.
Авторы книги предлагают и обосновывают пути и методы совершенствования сис-
тем управления как элемента единого совместно с самолетом комплекса при решении
задач ведения боевых действий. Столь детальное рассмотрение АСУ актуально для
современных интегрированных Военно-Воздушных Сил в связи с необходимостью
привести всю имеющуюся и вновь создаваемую систему в единый орган управления.
Достаточно подробно представлена авиационная техника, состоящая на вооруже-
нии авиации ПВО в настоящее время. Квалифицированно и профессионально анали-
зируются тактико-технические характеристики истребителей-перехватчиков 4-го по-
коления МиГ-31 и Су-27, их бортовые информационно-прицельные системы, системы
управления вооружением, управляемое ракетное вооружение класса "воздух-воздух",
рассматриваются способы и идеология боевого применения.
Больше трети объема книги посвящено перспективам развития авиационных систем
и комплексов. В последнем разделе, отражающем результаты глубоких научно-
прикладных исследований, рассматриваются вопросы совершенствования бортовых ин-
формационных систем, автоматизации управления при решении различных задач, веде-
ния боевых действий в сложной радиоэлектронной обстановке, использования интел-
лектуальных систем; большое внимание уделяется повышению бортового интеллекта
перспективных истребителей для решения задач перехвата и воздушного боя.
Материалы книги подготовлены специалистами, принимавшими прямое участие в
разработке, испытаниях и освоении истребителей разных поколений, их бортовых сис-
тем и систем управления боевыми действиями, что повышает полезность и значимость
всей книги.
Книга представляет большой познавательный интерес по вопросам развития отече-
ственной и зарубежной истребительной авиации. Научную ценность имеют также
описание современных боевых алгоритмов, изложение способов, видов и методов ве-
дения боевых действий и воздушных боев в различных тактических ситуациях, нали-
чие обширного графического и справочного материала.
Книга интересна не только для читателей, имеющих отношение к авиации ПВО и
се применению, и не только как изложение проблем становления и развития истреби-
тельной авиации. Монография полезна для широкого круга специалистов, занимаю-
щихся проблемами боевого применения авиации и обеспечивающих средств, в том
числе для преподавателей, студентов и слушателей гражданских и военных ВУЗов,
командного, летного и штурманского состава авиационных частей, а также для разра-
ботчиков конкретных систем и комплексов.
В. М. Кутахов,
профессор,
доктор технических наук,
заслуженный деятель науки РФ
генерал-лейтенант
А. Т. Силкин С. А. Колядин
профессор, профессор,
доктор военных наук доктор технических наук,
генерал-майор заслуженный деятель науки РФ
генерал-майор
Введение
Вся история развития боевой авиации в нашей стране свидетельствует о противостоянии
уровня совершенствования ударных и оборонительных авиационных средств. В конце 40-х го-
дов равновесие между ними было нарушено появлением бомбардировщиков большой дально-
сти, носителей ядерного оружия. Чаще стало нарушаться воздушное пространство СССР. Авиа-
ция ПВО стала оснащаться реактивной техникой - в конце 40 - начале 50-х годов поступают ис-
требители МиГ-15, МиГ-17, Як-25, но они могли бороться лишь с дозвуковыми воздушными
целями. В середине и в конце 50-х принимаются на вооружение первый сверхзвуковой истреби-
тель МиГ-19 и истребители-перехватчики Су-9, Су-11.
В 60-е годы боевая мощь авиации ПВО возрастает после появления высотных сверхзвуко-
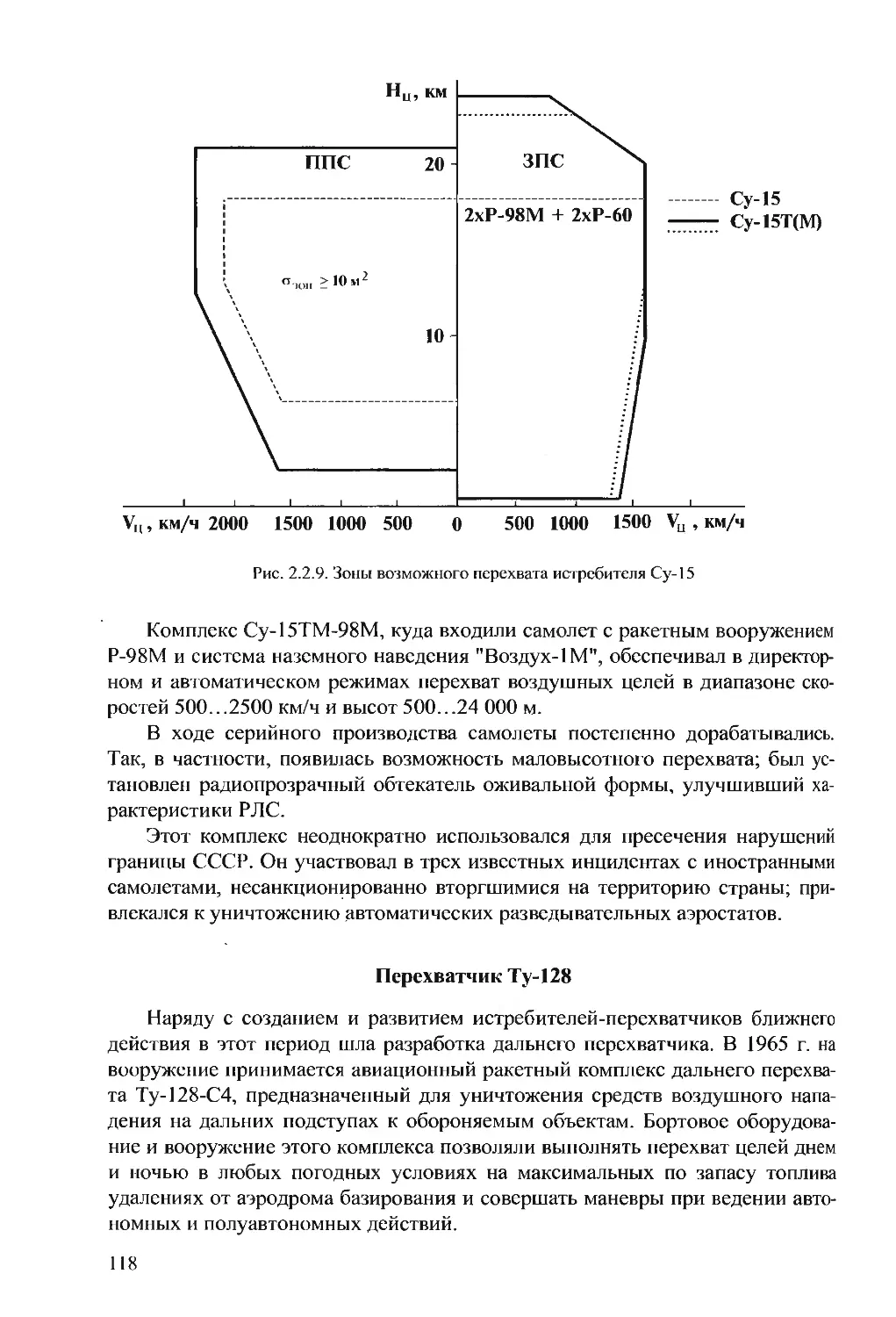
вых перехватчиков Су-15, Як-28П, Ту-128. Совершенствуются структура и средства управления
авиацией; поступают на боевое дежурство авиационные комплексы перехвата, включающие ис-
требители-перехватчики, управляемые ракеты класса "воздух-воздух" и наземные системы на-
ведения.
В конце 60 - начале 70-х годов в США создаются новейшие средства воздушного нападения
и разведки, принимаются на вооружение стратегические бомбардировщики FB-111,
В-70 и высотный скоростной стратегический разведчик SR-71. В середине 70-х годов появляет-
ся стратегический бомбардировщик В-1А, ведется разработка истребителей F-14, F-15 и
F-16. Совершенствуются способы преодоления средств ПВО, в боевые порядки ударных само-
летов включаются истребители сопровождения.
Для противодействия подобным средствам нападения требовались и новые средства пере-
хвата. На рубеже 60-70-х годов авиация ПВО начинает оснащаться специализированными вы-
сотными скоростными перехватчиками МиГ-25 и истребителями МиГ-23, способными бороться
с низколетящими целями. Эти истребители вооружаются новыми ракетами средней дальности
Р-23, Р-40 и высокоэффективными ракетами ближнего боя Р-60.
В 70-е годы начинают разрабатываться и поступать на вооружение ПВО страны истребители
четвертого поколения, решающие боевые задачи в широком диапазоне условий применения.
Перехватчики дальнего действия МиГ-31 и истребители общего назначения Су-27 способны
уничтожать носители стратегических крылатых ракет на больших удалениях, а также малораз-
мерные и высотные цели. Уже к середине 80-х годов перед авиационными комплексами пере-
хвата ставится общая задача защиты направлений от групповых налетов бомбардировщиков с
крылатыми ракетами большой дальности, эскортируемых истребителями сопровождения.
Истребительная авиация ПВО всегда развивалась как комплекс противодействия современ-
ным средствам воздушного нападения. Традиционное противоборство "брони и снаряда" здесь
проявлялось в увеличении рубежей перехвата (ответ на пуски с ударных самолетов противника
крылатых ракет вне зоны наземной ПВО), в росте высот боевого применения (ответ на появле-
ние высотных самолетов-разведчиков), в повышении маневренных характеристик (ответ на по-
явление истребителей сопровождения в боевых порядках ударных самолетов), в совершенство-
вании бортовых информационных систем и вооружения (ответ на возросшие возможности
ударной и истребительной авиации потенциального противника).
Самолет-истребитель при решении задачи завоевания господства в воздухе сталкивается не
только с бомбардировщиком противника (задача перехвата), но и с истребителем противника,
который прикрывает налет бомбардировщиков (задача воздушного боя). Поэтому летные харак-
теристики истребителя-перехватчика, безусловно, превосходят летные характеристики бомбар-
дировщика, но при этом и не уступают аналогичным летным характеристикам истребителя со-
провождения.
7
Логика развития самолета-истребителя - это обеспечение превосходства над возможным и с-
требителем противника. Обеспечить это превосходство можно только при гармоничном разв и-
тии всех компонентов самолета: планера, двигателя, оборудования, вооружения и бортового
интеллекта. Попыткачусилить какой-либо один из параметров (скорость, высотность, манев-
ренность, дальность стрельбы, незаметность) в ущерб другим параметрам, как правило, прив о-
дит к потере боевой эффективности самолета.
Очень жесткая соревновательность идет по всему спектру параметров самолета, двигателя,
оборудования, вооружения. Истребитель - это флагман новейших технологических достижений
и передовых наукоемких технологий в авиации, это сгусток идей и технологических прорывов.
Все новейшие легкие сплавы, композиционные и жаропрочные материалы в "горячих" зонах
двигателя, последние достижения в аэродинамике и газовой динамике, новейшие открытия в р а-
диоэлектронике, оптоэлектронике, информатике, теории управления и вычислительной технике,
технологические достижения в микроэлектронике и спецхимии энергонасыщенных материа-
лов - быстро "внедряются" в конструкции самолета-истребителя, в его системы и подсистемы.
Самолет-истребитель - это действительно двигатель научно-технического прогресса авиации и
в какой-то мере технических систем в целом.
К настоящему времени российскими издательствами выпущено немалое количество книг,
справочников, обзоров и рекламных проспектов с описанием российской военной авиации. В
большинстве из них даются выходные параметры авиационных комплексов, систем -и вооруж е-
ния, в основном относящиеся к тактико-техническим и летным характеристикам разных поко-
лений нашей авиационной техники. Хорошо изданные и иллюстрированные, такие книги пред-
ставляют интерес для круга людей, интересующихся авиацией, не являющихся специалистами в
близких к ней областях. В подобной литературе, написанной чаще всего журналистами или и с-
ториками, отсутствуют ответы на важные вопросы - как развивались и за счет чего получены те
или иные параметры авиационной техники и как практически используются передовые дости-
жения в боевых действиях. И уж совершенно не представлены перспективы развития авиации и
пути создания новых разработок.
Если взять научно-техническую литературу, отражающую вопросы боевой авиации, то ел е-
дует отметить в основном общетеоретический характер материала по проектированию, разра-
ботке, испытаниям и эксплуатации истребителей, авиационных систем и ракетного вооружения,
без привязки к конкретным авиационным комплексам и их характеристикам.
В предлагаемой книге предпринята попытка дать четкое представление о боевых возможн о-
стях как прошлых (представив их развитие), так и современных авиационных комплексов и
главное - показать, как достигаются эти возможности, какова роль внешних и бортовых спет ем
в обеспечении и совершенствовании боевых характеристик авиационных комплексов перехвата.
Вводятся и разъясняются основные боевые показатели, в том числе:
- зоны возможного перехвата воздушных целей,
- зоны действия перехватчика,
- рубежно-временные характеристики,
- зоны возможных атак,
- зоны возможных пусков.
Приводятся графические и количественные данные по некоторым из этих зон, характери-
зующих возможности ряда конкретных авиационных комплексов, состоявших на вооружении
авиации ПВО страны. Даются материалы по боевому применению и вооружению специализи-
рованных перехватчиков и истребителей МиГ-25, МиГ-23, МиГ-31, Су-27, а также по их борто-
вому алгоритмическому и индикационному обеспечению, в разработке которого авторы книги
принимали непосредственное участие.
Достаточно подробно представлены на описательном и математическом уровне различные
способы и методы, относящиеся к боевому применению авиации ПВО, в том числе:
• способы выхода в боевое соприкосновение;
• способы ведения групповых и полуавтономных действий;
• виды боевых порядков;
• методы поиска воздушных целей;
8
• методы наведения истребителей внешними сист емами;
• методы координированного наведения;
• методы самонаведения истребителей;
• методы наведения ракет класса "воздух - воздух";
• методы управления при атаке противодействующих целей;
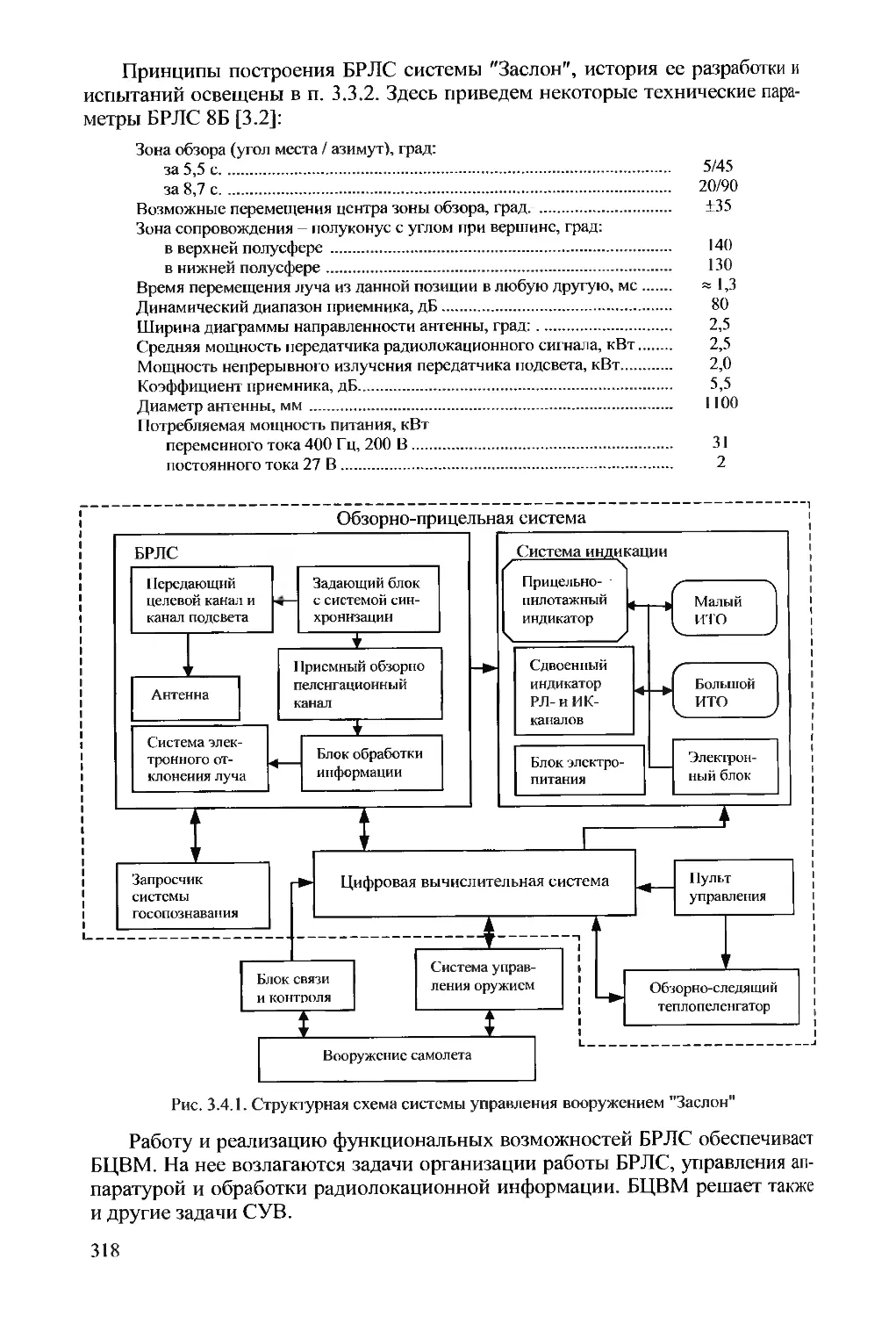
• методы и законы траекторного управления истребителем на боевых режимах;
• способы интеллектуальной поддержки принятия решения экипажем.
Только использование достижений научно-технической революции позволило создать высо-
коэффективную технику и авиационные системы, обеспечивающие решение задач ПВО, успеш-
ное противоборство с весьма совершенной техникой возможного противника в сложной боевой
обстановке. Да и сама истребительная авиация явилась основой дальнейшего развития фунда-
ментальных и прикладных наук в различных областях знаний. В книге раскрываются значение и
роль научно-технического npoipecca в достижении передовых или опережающих показателей
истребительной авиации ПВО в ее развитии и совершенствовании. Показано, как решались в
российских научно-исследовательских институтах и конструкторских бюро научные и технич е-
ские проблемы:
- расширения боевых возможностей истребителей и повышения эффективности систем и
вооружения (ГосНИИ авиационных систем);
- совершенствования автоматизированного управления боевыми действиями авиационных
комплексов перехвата (Московский НИИ приборной автоматики);
- создания и развития авиационных комплексов радиолокационного дозора и наведения
(Московский НИИ приборостроения);
- разработки и развития способов боевого применения авиации ПВО (2-й Центральный НИИ
Минобороны РФ);
- развития бортовой радиолокации истребителей и перехватчиков (НИИ приборостроения и
НИИ радиостроения);
- создания самолетов для ПВО и реализации новых технических решений (ОКБ
им. А. И. Микояна и ОКБ им. П. О. Сухого).
Историко-техническая часть книги дает возможность читателю понять, какой путь прошла
инженерная мысль в развитии боевой истребительной авиации и в ее применении; как создава-
лись, отрабатывались и испытывались такие элементы авиационных боевых комплексов, как бо р-
товые радиолокационные станции, управляемые ракеты класса "воздух - воздух", методы прице-
ливания и наведения, системы управления вооружением, системы радиопротиводействия, системы
автоматического управления истребителем; какие трудности и проблемы преодолевались при раз-
работке совершенной для своего времени авиационной техники. Впервые широко освещается
применение истребителей МиГ-21, МиГ-23, МиГ-25 в реальных боевых действиях и обобщается
опыт локальных войн при участии российской истребительной авиации с указанием решаемых з а-
дач, способов действий и боевых порядков. Описываются авиационные комплексы перехвата
80 90-х годов МиГ-31, Су-27 и реализация на их борту научно-технических достижений.
Представляя авиационный ракетный комплекс перехвата в виде единой системы, материал
книги достаточно полно отражает автоматизированное управление боевыми действиями истре-
бительной авиации с использованием наземных и воздушных пунктов наведения. Изложены
принципы автоматизации управления, структура АСУ, входяшис в нее подсистемы и основные
решаемые задачи; даются физические и математические понятия различных методов и подхо-
дов, используемых в наземных и воздушных АСУ, в том числе: цслсраспределения, перснацел и-
вания, поиска, наведения, полуавтономных действий, предотвращения столкновений. Описыв а-
ются работа авиационного комплекса радиолокационного дозора и наведения А-50 и его боевое
применение, включая организацию групповых действий истребителей.
Обобщив отечественный и зарубежный опыт разработки авиационных комплексов и борто-
вых систем, авторы пришли к выводу: боевые характеристики перспективных и модернизиру е-
мых комплексов в основном будут определяться степенью использования достижений научно-
технического прогресса и уровнем интеллекта, заложенного в бортовых системах. От этого за-
висят объем и качество решения задач, совершенство авиационного комплекса и возможности
его применения в сложных условиях.
9
В связи с этим в заключительной части книги представлены оригинальные материалы ис-
следований и проработок по перспективным направлениям создания авиационной техники и
бортовых систем. Сюда включены результаты исследований по совершенствованию бортовых
информационных и вычислительных систем (радиолокационных и оптико-локационных систем,
комплексов радиоэлектронного противодействия, систем спутниковой навигации, типовых ко м-
плексов радиосвязи, цифровых вычислительных машин и систем), по автоматизации управления
самолетом при перехвате воздушных целей, по расширению возможностей ведения дальнего
ракетного воздушного боя, по многоцелевой атаке, по ведению боевых действий в сложной и н-
формационной обстановке, по использованию интеллектуальных систем при боевом примене-
нии перспективного истребителя, по организации интегрированного комплекса бортового обо-
рудования.
Боевое применение истребителей-перехватчиков рассматривается или упоминается во мно-
гих книгах и статьях, в том числе в зарубежных источниках, но в настоящее время нет книги, по
которой можно было бы составить достаточно полное представление о бортовых системах с о-
временных истребителей, о новейших методах и способах боевого применения и перспективных
направлениях совершенствования авиационных боевых комплексов, о путях дальнейшего дви-
жения науки и техники при новых разработках и модернизации авиационных систем. В насто я-
щей книге ставится задача восполнить этот пробел. Авторы старались представить ее содержа-
ние в виде гармоничного сочетания историко-научного очерка развития истребительной авиа-
ции и ее применения с научно-техническим материалом по современным и перспективным
авиационным комплексам и автоматизированным системам управления боевыми действиями.
Большое внимание уделяется описанию конкретных достижений, реализованных в авиационных
боевых комплексах, касающихся в первую очередь их боевого применения, боевых возможно-
стей и интеллектуального уровня борта в решении боевых задач.
Материалы книги написаны специалистами российских НИИ и ОКБ, непосредственно вла-
деющими научно-техническими проблемами создания и применения авиационной техники
ПВО. Книга создана под научным руководством и редакцией академика Е. А. Федосова; опера-
тивное руководство и составление выполнил Л. Е. Баханов. Участие каждого из авторов в напи-
сании разделов распределилось следующим образом:
• раздел 1 - В. В. Гиндранков, В. А. Максимович;
• раздел 2 - В. К. Бабич, Л. Е. Баханов, Г. П. Герасимов, В. Ф. Левитин, Ю. Ф. Полушкин,
Е. А. Федосов;
• раздел 3 - Л. Е. Баханов, В. К. Гришин, В. Ф. Левитин, В. В. Слатин, Б. Е. Федунов:
• раздел 4 Л. Б. Горощенко;
• раздел 5 - В. С. Зинич, В. И. Карпеев;
• раздел 6 - Л. Е. Баханов, В. С. Зинич, В. В. Слатин, Е. А. Федосов, Б. Е Федунов,
Л. Е. Широков.
Другие авторы материалов, использованных в книге, указаны в примечаниях к соответст-
вующим разделам. Большая работа по редактированию рукописи и оформлению ее для издания
проведена коллективом под руководством Л.Ф. Прорехиной.
Книга рассчитана на широкую аудиторию читателей, включающую научную и техническую
общественность, инженеров, студентов и преподавателей вузов, военных специалистов, а также
людей, интересующихся техническими и научными вопросами истребительной авиации.
Авторы надеются на интерес читателей и будут рады обсудить с ними проблемы, затрон у-
тые в этой книге.
раздел
Авиация
в системе
ПВО
России 1
Рассматриваются общие вопросы состояния и применения авиации в сис-
теме ПВО РФ. Выделены проблемы боевого применения авиационного ком-
плекса перехвата и его взаимодействия с единой системой управления авиа-
цией ПВО. Прослеживается развитие в послевоенный период способов боево-
го применения (от дежурства на аэродроме и в воздухе до полуавтономных
и групповых действий), описываются задачи и организация боевых действий
авиации ПВО. Представлены единая система управления авиацией ПВО на
всех этапах полета, иерархическая структура, назначение и состав техниче-
ских средств, информационный обмен при выполнении боевой задачи, подни-
маются проблемные вопросы взаимодействия авиационного комплекса
с АСУ.
1.1. Истребительная авиация
и ее боевое применение*
1.1 Л. Развитие способов боевого применения истребителей
Анализ состояния, развития и совершенствования истребительной авиа-
ции (ИА), форм и способов ее боевого применения показал, что боевое при-
менение истребительных авиационных частей и подразделений, их тактика
и ее сердцевина - воздушный бой как форма боевого применения - это про-
цесс сложный и многогранный, требующий строгого научного подхода для
познания особенностей и закономерностей его развития в различных услови-
ях тактической обстановки [1.1-1.3].
Практически с самого начала зарождения ИА способы ее боевого приме-
нения при прикрытии объектов от ударов с воздуха разрабатывались с учетом
совместного применения с зенитной артиллерией, действовавшей в своих зо-
нах ответственности. Истребители вводились в бой до зоны огня зенитной ар-
тиллерии, нанося удары по воздушному противнику на дальних подступах к
объекту. Совершенствовались организационная структура и способы боевого
применения авиации ПВО. Непосредственное прикрытие важнейших объек-
тов возлагалось на специально выделенные части истребительной авиации,
которые выполняли свои задачи во взаимодействии с зенитными частями.
Основным способом боевых действий ИА ПВО являлся ввод истребителей в
бой из положения "дежурство на аэродроме" и "дежурство в воздухе".
Уже накануне Великой Отечественной войны в нашей стране были выра-
ботаны и проверены на учениях и в боевой обстановке, а также закреплены в
боевых уставах основные положения боевого применения истребительной
авиации при выполнении ею боевых задач. В Великой Отечественной войне
ИА стала одним из важнейших родов войск ПВО и основным средством
борьбы с воздушным противником на дальних подступах к прикрываемым
объектам.
При решении задач противовоздушной обороны объектов в ходе войны
ИА ПВО применяла следующие способы боевых действий:
• патрулирование в воздухе;
• вылеты на перехват из положения "дежурство на аэродроме";
• "свободная охота"; ч
• непосредственное сопровождение своих самолетов и эшелонов в пути.
В написании подразд. 1.1 принимал участие В. В. Слюняев.
13
Наиболее эффективным оказалось патрулирование наших истребителей в
зонах, расположенных на вероятных маршрутах полета авиации противника.
При отражениихударов бомбардировщиков, прикрытых истребителями, бое-
вой порядок наших истребителей строился из ударной и сковывающей групп.
Последняя находилась выше первой на 400...500 м. Схема воздушного боя
была следующей. Сковывающая группа связывала боем истребители против-
ника. В это время ударная группа одновременной атакой расстраивала боевой
порядок бомбардировщиков, разбивая его на мелкие группы и одиночные са-
молеты, после чего уничтожала врага атаками пар и звеньев истребителей.
Опыт войны показал, что прикрытие объектов способом дежурства на аэ-
родроме для ИА ПВО является наиболее целесообразным, эффективным и
экономичным.
Дежурство на аэродромах заключалось в нахождении истребителей на аэ-
родромах постоянного базирования и засадах на площадках в различных сте-
пенях боевой готовности. Степени боевой готовности определялись конкрет-
ной воздушной обстановкой и возможностью своевременного оповещения
истребителей о противнике.
Как подтверждает боевой опыт, успех вылетов истребителей на перехват
и уничтожение противника из положения "дежурство на аэродроме" зависел
от своевременности оповещения истребителей и от хорошо налаженного на-
ведения на противника. Применение истребителей ПВО из засад широкого
распространения в ИА ПВО в период ВОВ не получило, хотя умелая органи-
зация засад на маршрутах полета самолетов противника всегда приносила ус-
пех. Ограниченное применение данного способа объясняется тем, что коман-
дование ИА соединений ПВО, назначая истребители в засады, не всегда мог-
ло обеспечить их средствами связи и оповещения. Выполнение боевой задачи
истребителями ПВО способом "свободная охота" в ходе боя было ограничен-
ным. Это связано с тем, что истребители ПВО выполняли задачи по прикры-
тию определенного объекта и не имели свободы действий. Полеты самолетов-
"охотников" на свободный поиск противника давали положительный резуль-
тат лишь при действиях в прифронтовой полосе. Этот способ стал применять-
ся, когда на вооружении ИА ПВО появились новые самолеты, превосходящие
по своим тактико-техническим данным самолеты противника, а советские
летчики приобрели значительный боевой опыт. "Свободная охота" велась в
основном парами в определенных районах над территорией, занимаемой про-
тивником. "Охотники" самостоятельно вели поиск вражеских самолетов и,
максимально используя внезапность первой атаки, наносили авиации против-
ника чувствительные потери.
При обеспечении боевых действий бомбардировочной и штурмовой
авиации истребители ПВО применяли следующие способы боевых действий:
• непосредственное сопровождение или прикрытие бомбардировщиков и
штурмовиков в районе их действий и на маршрутах вероятного появле-
ния истребителей противника;
• подавление и уничтожение истребителей противника на аэродромах и
блокирование их с воздуха.
В послевоенном развитии ИА ПВО можно выделить несколько периодов.
Каждый из них имеет свои особенности, но общая их черта - использование во
14
всех областях авиационного дела последних достижений науки и техники, не-
уклонное наращивание боевой мощи в соответствии с требованиями времени.
В первые послевоенные годы одной из наиболее серьезных проблем было
состояние материальной части ИА ПВО. Боевое оружие, с которым была
одержана победа над фашистской Германией и милитаристской Японией и
которое в большинстве своем превосходило по качеству оружие врага, в по-
слевоенный период устарело, утеряло свое превосходство и не соответствова-
ло требованиям противовоздушной обороны. Уже к концу 1946 г. скорость
бомбардировщиков США и Великобритании достигла 600...630 км/ч, а высо-
та полета 12... 13 км. Это ставило их в один ряд с самолетами ИА. Кроме того,
бомбардировочная авиация США и Великобритании, имея радиолокационное
оборудование, могла совершать полеты в любых погодных условиях, а также
ночью, в то время как наши истребители не могли вести боевые действия в
сложных метеоусловиях и ночью.
В связи с этим обращалось внимание на перевооружение ИА ПВО такой
авиационной техникой, которая позволяла бы решать боевые задачи в любых
метеорологических условиях днем и ночью. В марте 1946 г. по решению
Совета Министров СССР были приняты меры по обновлению самолетного
парка ПВО.
Иностранные истребители, а они в ИА ПВО к этому времени составляли
65% самолетного парка, стали заменяться истребителями отечественного
производства. На вооружение ИА ПВО стали поступать истребители Ла-9.
Новый самолет имел максимальную скорость полета 690 км/ч и дальность по-
лета 1735 км. В 1946 г. на вооружении ИА ПВО появились первые реактив-
ные истребители Як-15 и МиГ-9. В последующем эти самолеты совершенст-
вовались и создавались новые образцы реактивных истребителей. В 1950 г. на
вооружение поступил истребитель МиГ-15.
К концу 1952 г. реактивные истребители составили 85,5% всех истребите-
лей ПВО. К этому времени на вооружении ИА ПВО были истребители Як-15,
Як-17б, МиГ-9, МиГ-15, МиГ-17, МиГ-15бис, Як-25, МиГ-19. По своим так-
тико-техническим данным реактивные истребители значительно превосходи-
ли истребители с поршневыми двигателями.
Сразу же после окончания войны в ИА ПВО формируются полки составом
до 52 самолетов. Создаются истребительные авиационные полки (иап), со-
стоящие из трех эскадрилий, в каждой по 12 самолетов (три звена по четыре
самолета). Полки сводились в истребительные дивизии, обычно состоявшие из
трех иап. Создавались также истребительные авиационные корпуса и воздуш-
ные истребительные армии, не имевшие постоянного штатного состава.
В основу боевого применения ИА ПВО был положен принцип массиро-
вания ее для обороны важных центров страны. Соединения ИА ПВО, оборо-
нявшие крупные центры страны, располагались в нескольких полосах на уда-
лении 250...400 км от прикрываемых объектов, что давало возможность на-
носить последовательные удары по противнику. В эшелонированном построе-
нии системы ПВО предусматривалось применение авиации в первом эшелоне
на дальних подступах к обороняемым объектам. Кроме того, считалось, что в
связи с появлением ядерного оружия возрастает значение борьбы с неболь-
шими группами авиации противника и даже с одиночными самолетами.
15
В этот период определяется место истребительной авиации в противовоздуш-
ной операции, при этом ей отводилась решающая роль. На нее возлагалось
выполнение следующих основных задач:
в дневное время:
• полное уничтожение на дальних подступах мелких групп и одиночных
самолетов;
• нанесение мощных ударов по большим группам авиации противника с
целью их разгрома и уничтожения до подхода к обороняемым объектам и
районам;
в ночное время:
• уничтожение самолетов противника в радиолокационных полях наведе-
ния и световых прожекторных полях;
• преследование и уничтожение самолетов противника на обратных мар-
шрутах полета;
• борьба с беспилотными средствами воздушного нападения.
Исходя из возможностей ИА, ее роль в войсках ПВО еще более возросла.
В некоторых районах ПВО было создано по нескольку воздушных армий
ПВО.
В послевоенные годы большое значение уделялось совершенствованию и
развитию тактики истребительной авиации. При этом учитывался опыт Вели-
кой Отечественной войны и опыт войны в Корее (1950-1953 гг.), а также по-
слевоенный уровень развития средств воздушного нападения. Главным в со-
вершенствовании тактики ИА было повышение эффективности управления в
целях наиболее полного использования боевых возможностей поступивших
на вооружение реактивных истребителей. Однако коренных изменений в бое-
вом применении ИА ПВО в первые послевоенные годы не произошло. Так
же, как и во время войны, основными способами боевых действий были пере-
хват из положения "дежурство в воздухе" и из положения "дежурство на аэ-
родроме". Боевые порядки состояли из нескольких групп тактического назна-
чения. Большая часть истребителей (до 2/3) выделялась в ударную группу,
предназначавшуюся для уничтожения бомбардировщиков противника. Со-
здавались и группы прикрытия, передовая и др. Основным видом боя считал-
ся групповой воздушный бой.
Большое внимание уделялось действиям истребителей в составе частей и
соединений. Отрабатывались различные способы атаки больших групп бом-
бардировщиков значительными силами истребителей. Однако опыт войны в
Корее показал, что боевые порядки соединений и частей маломаневренны и
слишком сложны в управлении. Применявшиеся в этой войне реактивные ис-
требители действовали, как правило, звеньями и шестерками. Опыт войны в
Корее подтвердил возрастающую роль первой и, в некоторых случаях, един-
ственной атаки. В связи с этим резко повысились требования к боевой выучке
летчиков в области техники пилотирования, огневой подготовки и грамотного
использования информационно-прицельных систем. Этот опыт внимательно
и всесторонне изучался и широко использовался в дальнейшем при выполне-
нии боевых задач.
16
Период коренной перестройки Вооруженных Сил под влиянием военно-
технической революции (1954 1961 гг.) характеризуется бурным развитием
средств воздушного нападения (СВН). Необходимость надежной защиты от
СВН противника в условиях применения оружия массового поражения требо-
вала поиска и создания эффективного вооружения ИА ПВО. Только за период
1946-1961 гг. на вооружение авиации ПВО страны поступило свыше 20 типов
и модификаций истребителей, росло их количество. Так, если в 1954 г. было
2940 самолетов, то в 1958 г. - уже 4900.
В 1955-1956 гг. на вооружении ИА ПВО состояли в основном истребите-
ли МиГ-15 и МиГ-17 различных модификаций; одновременно в значительном
количестве начинают поступать сверхзвуковые истребители МиГ-19П.
В 1958-1960 гг. был разработан и принят на вооружение авиационный ракет-
ный комплекс перехвата (АРКП) Су-9-51. Самолет Су-9 обладал высокими
летно-тактическими характеристиками (максимальная скорость 2200 км/ч,
практический потолок - более 20 000 м).
В середине 50-х годов остро встала проблема борьбы с маловысотными
целями. Для борьбы с такими целями в 1954 г. был создан истребитель Як-25,
обладавший околозвуковой скоростью полета (1090 км/ч) и рекордной для то-
го времени продолжительностью полета (2,5 ч). В последующие годы на базе
этого самолета был создан mhoi оцелевой самолет Як-28.
Большие скорости сближения потребовали увеличения дальностей обна-
ружения воздушного противника, лежащих за пределами оптической видимо-
сти. На истребителях стали устанавливаться бортовые радиолокационные
станции с дальностью обнаружения до 20 км (РП-9У). Их применение обес-
печило не только возможность действия в любых метеорологических услови-
ях и ночью, но и перехват и уничтожение воздушных целей на сверхзвуковых
скоростях. Таким образом была решена проблема всепогодного истребителя.
В связи с этим отпала необходимость в обеспечении действий ИА ПВО зе-
нитными прожекторами.
Для данного этапа характерно применение на самолетах-перехватчиках
МиГ-17 и МиГ-19 управляемого вооружения класса "воздух-воздух" (К-5М)
с телеуправляемыми системами наведения. Позже были созданы ракеты
РС-2У, РС-2УС. Применение управляемых ракет класса "воздух-воздух" по-
зволило увеличить дальность (до 2...6 км) и точность стрельбы, вывести ата-
кующие истребители из-под оборонительного пушечного огня цели и тем са-
мым повысить их боевую эффективность.
Увеличение скоростей полета, освоение бомбардировщиками и самоле-
тами тактической авиации противника полетов на малых и предельно малых
высотах, применение средств радиопротиводействия резко усложнили приме-
нение истребительной авиации. Скорости целей и истребителей-перехватчи-
ков уравнялись, в силу чего атака в заднюю полусферу была ограничена, а
атака в переднюю полусферу при огромных скоростях сближения требовала
применения БРЛС с большой дальностью обнаружения воздушных целей.
Применению истребителей-перехватчиков на малых высотах осложняло ме-
шающее воздействие земли на работу БРЛС.
Эти проблемы нашли свое решение в разработке новых АРКП. В после-
дующих поколениях истребителей-перехватчиков был!1 изысканы способы
17
2-4094
обнаружения целей на больших дальностях и на фоне земли и создано новое
поколение ракет класса "воздух-воздух".
В эти годы дальнейшее развитие получила теория противовоздушной
операции. Основным содержанием ее считались бои и сражения, проводимые
авиацией ПВО во взаимодействии с зенитно-ракетными войсками и зенитной
артиллерией по единому плану.
Сражения и воздушные бои рассматривались как ряд одновременных и
последовательных боев, проводимых по единому замыслу и плану при отра-
жении удара воздушного противника. Группировки войск округа (армии)
ПВО для ведения операции стали создаваться на основном воздушном на-
правлении, а не для прикрытия отдельных объектов, как это было раньше.
Основу построения группировки составляли несколько эшелонов истребите-
лей. Группировка войск создавалась с таким расчетом, чтобы можно было
наиболее полно использовать возможности каждого рода войск и уничтожать
воздушного противника на максимальном удалении от обороняемых объек-
тов. Резерв, как правило, выделялся от ИА ПВО. Истребительная авиация яв-
лялась самым маневренным и мощным родом войск ПВО страны. Она пред-
назначалась для уничтожения воздушного противника на дальних подступах
к обороняемым объектам.
С 1960 г. в войсках ПВО страны ИА была представлена организационно
истребительными авиационными полками, которые входили в состав соеди-
нений и объединений ПВО.
Основными способами боевых действий, которыми ИА решала свои за-
дачи, были:
• перехват из положения "дежурство на аэродроме" в готовности № 1;
• перехват из положения "дежурство в воздухе";
• самостоятельный поиск и уничтожение воздушного противника, "охота".
Качественный скачок в развитии авиационной техники и средств обеспе-
чения ее боевого применения оказал значительное влияние на изменение ха-
рактера воздушного боя и условий его ведения. Если в годы войны поиск воз-
душного противника осуществлялся визуально, воздушный бой носил груп-
повой характер, а истребитель по одной цели мог произвести несколько атак,
то с появлением реактивных истребителей, с ростом скоростей и совершенст-
вованием вооружения и информационно-прицельных систем наведение оди-
ночных истребителей-перехватчиков на цель стало производиться с земли с
использованием АСУ, бой фактически сводился к одной атаке. На основе
анализа боевых возможностей ИА был сделан вывод о том, что для успешно-
го уничтожения воздушного противника необходимо было создать следую-
щее соотношение сил:
• для истребителей-перехватчиков с пушечным вооружением - 1:3,5;
• для истребителей-перехватчиков с ракетным вооружением - 1:1,5.
В авиации широко внедрялся опыт войны в Корее, который подтвердил
необходимость использования в бою небольших групп, а также роль и место
первой атаки.
Взаимодействие ИА ПВО с другими родами войск ПВО страны и ИА
других родов Вооруженных Сил организовывалось путем распределения зон,
18
секторов, высот, задач и назначения рубежей взаимодействия. Группировка
истребителей ПВО создавалась так, чтобы обеспечивалась возможность со-
средоточения ее сил на главном направлении действия противника.
Вооружение истребителей-перехватчиков ракетами класса "воздух-
воздух" и оснащение бортовыми РЛС с большой дальностью обнаружения
дало возможность атаковать самолеты противника в ППС и под большими
ракурсами и повысило вероятность поражения и результативность атаки.
В конце 60 - начале 70-х годов на вооружение ИА ПВО поступают более
совершенные комплексы перехвата Як-28П-8М, Су-15-98, Ту-128-С4,
МиГ-23М и МиГ-25-40. Этот период характеризуется достижением военно-
стратегического равновесия между СССР и США (1962-1972 гг.).
Развитие авиации ПВО в этот период идет в направлениях:
• увеличения скорости, высоты и дальности полета;
• вооружения истребителей более совершенными управляемыми ракетами
класса "воздух-воздух";
• создания АРКП, включающих в себя самолет-истребитель, ракеты и ап-
паратуру наведения;
• создания специальных истребителей-перехватчиков (для действия на ма-
лых и предельно малых высотах, на больших высотах и в стратосфере), а
также истребителей дальнего действия.
По мере поступления более совершенных истребителей-перехватчиков
развивались и совершенствовались способы боевого применения ИА. Исходя
из боевых возможностей, истребители-перехватчики использовались для ве-
дения боя ночью и в сложных метеоусловиях.
Истребители использовались малыми группами (пара, звено, эскадрилья)
в боевых порядках "фронт", "пеленг", "клин". Возрастала роль первой атаки.
Основными способами боевых действий были:
• перехват из положения "дежурство на аэродроме";
• перехват из положения "дежурство в воздухе";
• самостоятельный поиск и уничтожение воздушного противника в при-
морских районах при действии истребителей вне радиолокационных зон.
Управление и наведение истребителей осуществлялось с КП частей и со-
единений. При наведении наряду с планшетным способом наведения широко
стала применяться аппаратура "Лазурь" и наведение голосом с помощью вы-
носных индикаторов кругового обзора. В 60-х годах широко стало приме-
няться автоматизированное наведение с формированием команд аппаратурой
"Каскад" и АНИП-68 и передачей их на борт по телекодовой радиолинии. Ос-
новной проблемой, решаемой авиацией ПВО, являлась проблема уничтоже-
ния самолетов противника на малых и предельно малых высотах.
Следующим этапом развития ИА ПВО и способов ее боевого применения
является период сохранения паритета с США и НАТО (1973-1986 гг.). Авиа-
ция ПВО в это время переживает процесс качественных изменений. На воо-
ружение поступают истребители 4-го поколения, способные решать боевые
задачи в широком диапазоне условий боевого применения. Принятые на воо-
ружение истребители дальнего действия (МиГ-31) и истребители общего на-
19
2*
значения (Су-27) способны уничтожать носители стратегических крылатых
ракет (СКР) на удалении 1200...2500 км, а также малоразмерные и высотные
цели. Эти истребители успешно ведут воздушный бой со всеми типами ис-
требителей США и НАТО.
Развитие форм и способов боевого применения авиации ПВО идет преж-
де всего в направлении повышения ее активности [1.1, 1.3]. Именно актив-
ность авиации, ее маневренность и возможность сосредоточивать усилия по-
зволяют встречать самолеты противника и крылатые ракеты на рубежах, вы-
годных обороне. Новый этап развития авиации ПВО был закреплен Боевым
уставом, излагающим основные положения подготовки, ведения боевых дей-
ствий и их обеспечения с учетом развития техники и опыта локальных войн
(введен в действие в августе 1984 г.). Согласно уставным положениям, авиа-
ция, являясь основной маневренной ударной силой ПВО, уничтожает средст-
ва воздушного нападения в полете на максимальных дальностях от обороняе-
мых объектов, перед зонами и в зонах зенитных войск. На вооружении авиа-
ции ПВО состояли различные по боевому предназначению и боевым
возможностям истребители, транспортные и специальные самолеты. Истреби-
тели ПВО делились на истребители общего назначения и дальнего действия.
Истребители общего назначения предназначались для уничтожения средств
воздушного нападения противника во всем диапазоне высот и скоростей по-
лета и были способны вести ближний и дальний воздушный бой. Истребители
дальнего действия предназначались для уничтожения средств воздушного
противника за пределами досягаемости других средств ПВО и, в основном,
для ведения дальнего воздушного боя.
Организационно ИА в войсках ПВО была представлена истребительными
авиационными полками и авиационными полками истребителей дальнего
действия. Полк состоял из трех авиационных эскадрилий и организационно
входил в состав корпуса (дивизии) ПВО.
Истребительный авиационный полк (авиационный полк истребителей
дальнего действия) уничтожал самолеты, вертолеты и беспилотные средства
противника в воздухе при выполнении задач противовоздушной обороны
объектов (районов) страны, препятствуя прорыву воздушного противника в
глубь страны, при прикрытии группировок войск, сил флота, аэродромов, а
также подразделений и частей других родов авиации в воздухе от атак истре-
бителей противника. Кроме того, он мог привлекаться к выполнению задач по
уничтожению (подавлению) наземных и надводных объектов противника, а
также к ведению воздушной разведки. Место и роль иап ПВО в боевых дейст-
виях корпуса (дивизии) ПВО определялись их положением в оперативном по-
строении ПВО.
Основной формой боевого применения иап ПВО является воздушный
бой. Кроме того, боевые задачи авиация ПВО могла выполнять также, осуще-
ствляя специальные боевые полеты.
В современном воздушном бою можно выделить противоборство сторон
на дальностях, превышающих дальность визуальной видимости, и противо-
борство при визуальной видимости. В первом случае - дальний воздушный
бой (ДВБ) - полет, обнаружение, опознавание, сближение и маневрирование
выполняются с использованием БРЛС и с применением ракет большой и
20
средней дальности. Во втором случае - ближний воздушный бой (БВБ) - ма-
неврирование осуществляется с большими перегрузками, полным использо-
ванием маневренных возможностей самолета, вооружения и физических дан-
ных летчика. Атака выполняется с применением ракет малой дальности или
пушечного вооружения. ДВБ и БВБ - это две фазы одного воздушного боя,
закономерно перерастающие из одной в другую. Однако не исключается, что
воздушный бой может начаться и закончиться в одной фазе. Характер и осо-
бенности воздушного боя раскрываются через его закономерности, принци-
пы, правила и этапы ведения. В дальнем воздушном бою истребители могут
применять тактические приемы, обеспечивающие им скрытый выход ударной
группы в область возможных пусков ракет. К таким тактическим приемам мо-
гут быть отнесены "лобовой удар", "удар во фланг", "удар вдогон". Для осу-
ществления этих тактических приемов истребители выполняли предбоевое
маневрирование и строились в боевой порядок групп тактического назначе-
ния, отвечающий замыслу боя (рис. 1.1.1).
В ближнем воздушном бою в зависимости от взаимного положения ис-
требители могут находиться в положении атакующих или обороняющихся.
В соответствии с этим боевые маневры в ближнем бою могут быть наступа-
тельными и оборонительно-наступательными. К наступательным относятся
такие известные боевые маневры, как "винт", "угол", "крыша", "вилка". Они
применяются при соответствующем взаимном положении истребителей и
противника. К оборонительно-наступательным маневрам можно отнести бое-
вые маневры "узел", "аркан", "крыша", "крюк", "ракушка".
Можно привести и некоторые типовые приемы оборонительных и насту-
пательных боевых маневров, которые применялись в боях во Вьетнаме и Ливане:
• "хорд терн" - энергичный координированный разворот с максимальной
перегрузкой для выхода из области возможного применения оружия про-
тивником;
• "брейк" - быстрый и внезапно выполняемый энергичный разворот с мак-
симальной перегрузкой и потерей скорости для увеличения углового пе-
ремещения самолета относительно атакующего противника;
• "сирое" ("ножницы") - оборонительный маневр, в котором выполняется
ряд последовательных доворотов в разные стороны в целях перехода к
атаке после проскакивания атакующего;
• "вертикал сплит" - нисходящий оборонительный маневр с вращением в
вертикальной плоскости;
• "дефексив спирал" - спираль, выполняемая в качестве оборонительного
маневра с целью принудить противника, выходящего в атаку на малой
скорости сближения, перейти к обороне;
• "дефексив сплит" - оборонительное расхождение пары в разных плоскостях.
Применяется для того, чтобы заставить атакующих перейти к обороне;
• "лоу спид" - маневр, применяемый для быстрого догона цели, позволяющий
атакующему оставаться с внутренней стороны разворота противника;
• "хай спид" - маневр, при котором осуществляется набор высоты за счет
избытка скорости для сохранения выгодного положения для атаки или
исключения затягивания в маневр "ножницы";
• "лафбери" - преследование противника по кривой погони.
21
12 км А _________3... 5 км
"Стрела"
Рис. 1.1.1. Боевой порядок групп истребителей в исходном положении
для завязки дальнего воздушного боя
22
В основу подготовки авиационных частей и подразделений авиации ПВО
были положены следующие принципы:
• постоянная высокая боевая готовность;
• способность вести боевые действия с применением различного оружия;
• сосредоточение основных усилий авиации на направлениях действий
главных сил воздушного противника в решающий момент;
• поражение воздушного противника на максимальных дальностях от обо-
роняемых объектов;
• непрерывность воздействия по противнику до полного уничтожения;
• активность, решительность и внезапность действий;
• экономия сил и средств;
• своевременный маневр частей, подразделений;
• заблаговременное создание резервов, их умелое использование и свое-
временное восстановление;
• организация и поддержание непрерывного взаимодействия истребитель-
ной авиации и зенитно-ракетных войск;
• всестороннее обеспечение боевых действий авиации;
• централизованное управление авиацией с широким применением АСУ;
• учет и использование морального и психологического факторов в интере-
сах выполнения поставленных боевых задач.
Авиационные части ПВО при выполнении боевых задач применяли сле-
дующие способы боевых действий.
При решении задач ПВО:
• одновременный ввод в бой и уничтожение воздушного противника ос-
новными силами из положения "дежурство на аэродроме" или "дежурство
в воздухе";
• последовательный ввод в бой и уничтожение воздушного противника
(звеньями, парами, экипажами) из положения "дежурство на аэродроме"
или "дежурство в воздухе";
• полуавтономный поиск (полуавтономные действия) и уничтожение воз-
душного противника;
• самостоятельный поиск и уничтожение воздушного противника в задан-
ном районе или полосе ("охота").
Ввод в бой истребителей ПВО мог осуществляться одновременно из раз-
личных исходных положений.
Прикрытие авиации ВВС и флота ИА ПВО осуществляла на маршрутах
полета к цели, в районах действий, на обратном маршруте или только на от-
дельных участках маршрута. При этом применялись следующие способы бое-
вых действий:
• расчистка воздушного пространства;
• заслоны в воздухе;
• патрульное сопровождение;
• блокирование аэродромов базирования истребителей противника.
При уничтожении наземных (морских) объектов истребители ПВО при-
меняли следующие способы боевых действий:
23
• одновременный удар всем составом или частью сил полка по одному или
нескольким заранее заданным объектам в назначенное время;
• последовательные удары подразделениями и одиночными самолетами по
одному или нескольким заранее заданным объектам в назначенное время
или по вызову из положения "дежурство на аэродроме".
При решении боевых задач ИА ПВО применяла сомкнутые, разомкнутые
и рассредоточенные боевые порядки. Боевые порядки состояли из групп раз-
личного тактического назначения: основной (ударной), которая могла состо-
ять из различных типов истребителей, групп обеспечения и резерва. Основ-
ными формами боевых порядков были "колонна", "клин", "пеленг", "фронт",
"змейка" и др. Основу их построения составляла пара.
В целях обеспечения своевременного вылета частей, подразделений и от-
дельных экипажей на выполнение боевой задачи устанавливались три степени
готовности к боевому вылету: готовность № 1, 2 и 3.
Организация управления истребителями ПВО оказалась главной пробле-
мой. Она должна была обеспечить эффективность использования возможно-
стей авиационных частей (подразделений) и условий выполнения задач в ус-
тановленные сроки и в любой обстановке.
Для осуществления управления авиационными частями и подразделениями
авиации ПВО была создана система управления, которая включала в себя орга-
ны управления, пункты управления, автоматизированные системы управления,
а также другие специальные системы и средства автоматизации. В этот период
с целью повышения оперативности и надежности управления принимается на
вооружение АСУ "Рубеж". Источниками радиолокационной информации для
АСУ частей ИА ПВО являлись АСУ КП соединений ПВО и автоматизирован-
ные источники подразделений и частей радиотехнических войск.
Большое внимание уделялось тактическому взаимодействию истреби-
тельной авиации и зенитно-ракетных войск. Взаимодействие между ними
осуществлялось распределением усилий по зонам боевых действий, а при
действии в одной зоне - по воздушным целям, высотам, времени, рубежам,
секторам (полосам) в интересах выполнения боевой задачи и обеспечения
безопасности истребителей. Взаимодействие между истребителями и их час-
тями заключалось в совместных согласованных действиях по уничтожению
воздушного противника по направлениям, рубежам, воздушным целям, высо-
там и времени действия. Взаимодействие в одной зоне - наиболее сложный
способ взаимодействия, но при нем достигалось надежное поражение против-
ника за счет одновременного воздействия большого количества активных сил,
полноты использования их боевых возможностей, усиления одного рода
войск другим в случае применения противником сильных помех и создания
наиболее трудных условий для применения им мер противодействия.
В основу строительства авиации ПВО на новом этапе закладывается прин-
цип разумной достаточности для обороны страны. Состав ее на театре военных
действий должен быть таким, чтобы отразить агрессию противника. Следует
отметить, что во всех случаях начала войны инициатива будет принадлежать
противнику, так как он первым нанесет удар с воздуха. В связи с этим резко
возрастает роль авиации ПВО, ее боевой готовности, вопросов взаимодействия
с ИА фронтов и округов, так как длительное время придется совместно вести
24
боевые действия. На этом этапе усилия истребительной авиации ПВО преду-
сматривается сосредоточить на главных стратегических воздушных направле-
ниях: на обороне г. Москвы и на непосредственной обороне важнейших груп-
пировок вооруженных сил и экономических объектов [1.1-1.3]. С этой целью
авиация ПВО должна иметь мощную авиационную группировку, вооруженную
истребителями, способными уничтожать самолеты - носители крылатых ракет
на рубежах пуска ракет (за 2...3 тыс. км), крылатые ракеты в полете, а также
средства нападения, изготовленные по технологии "Стеле".
Особенность боевых действий авиации ПВО будет состоять в том, что
придется отражать удары и уничтожать неослабленного противника по суще-
ству только после пересечения им государственной границы. Следовательно,
авиации ПВО в зонах поражения зенитно-ракетных комплексов придется
взаимодействовать с силами и средствами ПВО Сухопутных войск и ИА
ВМФ. Самыми важными вопросами для авиации ПВО будут завоевание гос-
подства в воздухе и перехват стратегической инициативы. Для этого авиация
ПВО должна активно вести воздушные бои и сражения. В качестве резерва
главнокомандующего войсками в этих условиях могут выделяться несколько
иап (8-9), вооруженных истребителями МиГ-31, Су-27 и их модификациями.
Управление - с передового воздушного пункта на базе АК РЛДН. Эти иап со-
ставят мобильное соединение, предназначенное для решения задач на любом
стратегическом направлении. На театре военных действий резерв может со-
ставлять также несколько иап. Особо важное значение приобретают действия
ПВО в операциях, сражениях и боях. Таковы основные взгляды на боевое
применение авиации на новом этапе в соответствии с оборонительной воен-
ной доктриной, принятой в начале 1987 г.
1.1.2. Организация боевых действий авиации ПВО
В 80-е годы становится недостаточным рассматривать отдельно взятый
тип истребителя или системы управления, их характеристики и боевые воз-
можности. Возникла необходимость в рассмотрении совокупности совместно
используемых воздушных и наземных средств, функционально объединенных
для выполнения единой боевой задачи, названной авиационным комплексом
перехвата. Он включает в себя истребитель с его системами и устройствами
(авиационные средства поражения, пилотажно-навигационная система, сис-
тема управления вооружением и др.), средства наземного обслуживания и
контроля индивидуального назначения, а также наземные и воздушные сред-
ства управления, наведения и целеуказания. Правильные сочетания возмож-
ностей бортового оборудования и вооружения с наземными и воздушными
средствами управления позволили обеспечить высокую эффективность и не-
уязвимость самолета в боевых условиях.
Истребительные авиационные комплексы ПВО при решении боевых за-
дач применяют различные способы боевых действий [1,4-1.6]. Способ боевых
действий - это порядок применения сил и средств при выполнении боевой за-
дачи. Каждый способ боевых действий зависит от условий обстановки и при-
меняемых видов оружия. Ему присущи свои особенности организации и ве-
25
дения действий. Способ боевых действий содержит один прием или совокуп-
ность основных приемов. К ним относятся:
• сосредоточенные действия, рассредоточенные полеты по времени и в про-
странстве - в зависимости от направления (места) приложения усилий;
• одновременные действия, одновременный ввод в бой, последовательные
действия, последовательный ввод в бой - в зависимости от распределения
усилий по времени;
• действия по заранее заданным объектам, по выявленным в ходе боевых
действий объектам, по самостоятельно отыскиваемым объектам ("охота"),
полуавтономный поиск (полуавтономные действия)- в зависимости от
полноты информации об объектах действий;
• действия по плану (в назначенное время), действия по вызову, действия не-
медленно по готовности - в зависимости от требуемой срочности действий;
• действия из положения дежурства на земле (на аэродроме), действия из
положения дежурства в воздухе, действия из засад на земле и в воздухе -
в зависимости от исходного положения сил;
• действия всем составом, действия частью сил - в зависимости от количе-
ства участвующих сил.
При выполнении боевой задачи могут использоваться один или несколько
способов боевых действий. Выбор целесообразного способа (способов) бое-
вых действий определяется множеством факторов и зависит в первую очередь
от ожидаемой тактики авиации противника, боевых возможностей своих ис-
требителей, состояния информационной системы и системы управления Ос-
новным критерием для выбора того или иного способа боевых действий явля-
ется своевременное воздействие на воздушного противника на заданном ру-
беже. Поскольку информационная система и система управления находятся
под огневым и помеховым воздействием противника, их состояние и боевые
возможности меняются в зависимости от степени этого воздействия. Каждому
состоянию информационной системы и системы управления соответствует
свой способ ведения боевых действий, при котором в конечном счете дости-
гается максимум эффективности боевых действий истребителей.
Воздушный бой истребительных комплексов включает следующие этапы:
сближение с обнаруженным противником, одну или несколько атак, боевое
маневрирование между атаками и выход из боя. Воздушному бою предшест-
вует поиск противника. Поиск воздушного противника осуществляется с по-
мощью бортовых технических средств, визуально или в их сочетании. Не-
зависимо от содержания и полноты информации о воздушной обстановке,
получаемой от внешних источников (наземных или воздушных пунктов
управления), экипажи непрерывно ведут поиск в течение всего полета. От-
ветственность в групповом полете за поиск противника в ППС возлагается на
ведущего группы. Ведомые экипажи отвечают главным образом за поиск про-
тивника на флангах и в ЗПС. Все летчики несут ответственность за взаимное
наблюдение непросматриваемых секторов соседних самолетов и за безопас-
ность пилотирования в групповом полете. Влияние поиска на исход боя при-
знавалось всегда. Можно вспомнить известное выражение: "Первый увидел -
26
победил". Следует отметить ряд новых моментов при выполнении поиска
сверхзвуковыми истребителями ПВО.
Во-первых, ответственность за его исход уже поровну делится между
летчиком и пунктом управления, поскольку самолетные средства поиска и на-
земная или воздушная система оповещения и наведения имеют различные
возможности по обнаружению цели и установлению ее принадлежности. На-
лаженное взаимодействие и четкое распределение обязанностей между ними
предопределяю! успех боя.
Во-вторых, способы ведения поиска стали резче разделяться на поиск в
зоне радиолокационного поля своих радиолокационных средств (наземных
или воздушных) и вне его. В первом случае истребители находятся под кон-
тролем пунктов управления. Основным видом информации, используемой для
управления и наведения на цели, является регулярная информация о против-
нике и истребителях, а основными способами ведения боевых действий явля-
ются групповые и одиночные действия с централизованным управлением
группой или одиночным истребителем соответственно с командного пункта
или пункта наведения. Экипажи истребителей обычно получают информацию
до момента обнаружения противника. У летчиков достаточно времени на ана-
лиз обстановки и принятие обоснованного решения. Положение значительно
усложняется, когда предстоит покидать пределы радиолокационного поля на-
земных и воздушных РЛС. В этих условиях можно рассчитывать только на
бортовые радиолокационные средства. Основным видом информации, ис-
пользуемой для управления, является косвенная информация, а основным
способом ведения боевых действий являются автономные действия (само-
стоятельный поиск и уничтожение воздушного противника).
В-третьих, опыт локальных войн показал, что для успешного ведения по-
иска воздушного противника его надо не только видеть, но и своевременно
обнаруживать. Истребители должны выдерживать соответствующие обста-
новке боевой порядок и режим полета. Для расширения поисковых возмож-
ностей истребителей и занятия ими тактически выгодного положения разра-
ботаны способы самостоятельного поиска целей в заданном районе. Среди
них можно выделить такие, как "заслон", "треугольник", "баттерфляй".
"Заслон" (рис. 1.1.2)- самый простой способ поиска. Он обеспечивает
наиболее равномерное распределение поисковых усилий по фронту:
Zny=f(So63,S),
где Хпу - плотность поисковых усилий; S0&i - просматриваемая при поиске
относительная площадь, представляющая собой произведение ширины поло-
сы обзора БРЛС, времени обзора, скорости сближения и числа самолетов
в поисковой группе; S - суммарная относительная площадь, представляющая
собой произведение ширины полосы поиска, времени поиска и скорости
полета цели.
Данный способ применяется для нахождения целей парой или отрядом
истребителей и представляет собой полет с поиском на встречно-пересекаю-
щихся курсах с оптимальным углом поиска по прямоугольному маршруту с
двумя разворотами на 180° и равными дистанциями между истребителями,
27
Рис. 1.1.2. Поиск целей способом "заслон"
обеспечивающими нужное перекрытие индивидуальных полос обзора
(см. также 4.4.1). Если для поиска используется отряд (звено), то на маршруте
находятся три истребителя, выполняющих поиск на высотах 6000 .7000 м.
Четвертый - ударный истребитель - в зоне дежурства в воздухе на высоте
7000...8000 м просматривает верхнюю полусферу. Место зоны дежурства
рассчитывается таким образом, чтобы обеспечивался вывод ударного истре-
бителя в исходное положение для атаки по обнаруженной поисковой группой
28
цели на любом участке маршрута.Способ "треугольник" (рис. 1.1.3) предпола-
гает использование поисковой группы и группы наращивания усилий (по три
самолета в группе), выполняющих полет по треугольным маршрутам. Поис-
ковая группа с равными дистанциями между самолетами осуществляет поиск
целей на фоне земли на встречно-пересекающихся курсах на двух участках
большого маршрута. При этом размеры активных участков могут быть раз-
личными, чем обеспечивается нужное распределение поисковых усилий по
фронту. Направление наклона маршрута поиска определяет и направление
распределения поисковых усилий по плотности. На пару с каждым истреби-
телем поисковой группы (1 — 4, 2-5, 3-6) по второму (меньшему) маршруту
выполняют полет истребители группы наращивания усилий, имеющие задачу
уничтожить цели, обнаруженные, но не атакованные их напарниками из по-
исковой группы, и производят поиск в верхней полусфере. Синхронность
действий истребителей группы наращивания усилий и поисковой группы дос-
тигается смещением второго маршрута по налету. При этом скорость полета
поисковых истребителей составляет 1100 км/ч, а истребителей наращивания
усилий - 900 км/ч и менее из-за различной длины маршрутов поиска. Способ
обеспечивает высокую плотность воздействия по противнику при непропор-
циональном распределении поисковых усилий относительно оси полета.
Наиболее компактным способом, позволяющим более полно использо-
вать поисковые возможности, является способ "баттерфляй" (рис. 1.1.4). Он
предусматривает действия поисковой группы на маршруте поиска (три истре-
бителя) и группы наращивания усилий в зоне дежурства (1-2 истребителя).
Поисково-ударная группа выполняет полет на равных дистанциях между ис-
требителями по маршруту поиска, по форме напоминающему восьмерку. Это
позволяет рационально распределить поисковые усилия по фронту в полосе
до 320 км с наибольшим уплотнением в центре боевого порядка и глубиной
до 200 км. Группа наращивания усилий ведет поиск целей на средних и
больших высотах из зоны дежурства в воздухе, расположенной за основным
маршрутом поиска, и наращивает усилия поисково-ударной группы.
Эти способы поиска позволили реанимировать старый способ боевых
действий "свободная охота" и придать ему дальнейшее развитие и признание
с использованием новых технических возможностей.
Ниже рассмотрены основные этапы воздушного боя и происшедшие из-
менения в них с поступлением на вооружение нового поколения истребитель-
ных авиационных комплексов ПВО.
Сближение - боевой маневр как этап воздушного боя, выполняемый ис-
требителем (группой) с момента обнаружения цели до занятия исходного по-
ложения для атаки. Скрытность и стремительность - два основных элемен-
таэтого этапа воздушного боя, обеспечивающих внезапность атаки и уничто-
жения воздушного противника. Они полностью сохранили свое значение в
воздушных боях истребительных комплексов ПВО. Однако способы занятия
наиболее выгодного для атаки положения изменились. Другим стало содер-
жание этапа, так как условия для стремительного сближения улучшились, а
для обеспечения его скрытности ухудшились. Основными факторами, оказы-
вающими непосредственное влияние на стремительность сближения, являют-
ся большая дальность обнаружения противника, высокая тяговооруженность
29
Рис. 1.1.3. Поиск целей способом "треугольник"
30
Рис. 1.1.4. Поиск целей способом "баттерфляй"
31
самолета, тактическая выучка летчика, надежность системы оповещения.
Только учет этих факторов дает право надеяться на достижение стремитель-
ности как первого элемента успешного сближения с противником. Второй
элемент сближения - скрытность. Под этим следует понимать комплекс ме-
роприятий, который лишает противника возможности получить точные дан-
ные о воздушной обстановке. Способы обеспечения скрытности на этапе
сближения значительно изменились. Маскировка на фоне облаков и солнца,
использование темного времени суток уже не могут обеспечить неожиданной
атаки противника. Наличие на истребителе станции предупреждения об облу-
чении (станции радиотехнической разведки) позволяет летчику определить
факт облучения его самолета РЛС противника, тип атакующего средства, сте-
пень опасности со стороны атакующего средства и принять решение на вы-
полнение противоракетного (противосамолетного) маневра, на применение
оружия или помех. Все это значительно усложняет достижение элемента
скрытности в современном воздушном бою. В ближнем воздушном бою
сближение (если противники видят друг друга) заканчивается борьбой за вы-
игрышную позицию и занятием тактически выгодного положения для атаки.
В дальнем воздушном бою (ДВЕ) при сближении (если противники не видят
друг друга) важную роль играет целеуказание от наземного или воздушного
КП. Кроме того, успех скрытного сближения с целью (противником) зависит
от наличия специальных самолетов электронного противодействия, обеспечи-
вающих радиоэлектронное подавление радиоэлектронных систем цели. В це-
лом успешное сближение в ДВЕ зависит от дальности обнаружения воздуш-
ной цели БРЛС и ее помехозащищенности, разрешенной дальности пуска и
возможностей управляемого вооружения, полноты и эффективности боевого
обеспечения, уровня тактической подготовки летчика и боевого расчета КП, а
также рационального построения боевого порядка группы перед боем и в
процессе боя.
Атака - наиболее ответственный этап воздушного боя. Атака цели включа-
ет маневр в сторону цели, прицеливание, пуск ракет или стрельбу из пушек.
Внезапность и стремление уничтожить противника с первой атаки были и ос-
таются одним из основных принципов ведения наступательного боя, а по от-
ношению к атаке - ее главными элементами. Вопрос достижения внезапности
атаки в условиях получения информации противником о воздушной обстанов-
ке весьма сложен. Он решается в групповых боях. Если для достижения скрыт-
ности сближения и сохранения в тайне замысла боя требуется применить пред-
боевые и боевые порядки, то внезапность атаки возможна лишь за счет пере-
строения самого боевого порядка. Новым в тактике воздушного боя следует
признать изменение задач, выполняемых группами различного тактического
назначения. В противоборстве сторон в бой первой чаще всего вступает демон-
стративная группа, в задачу которой входит обеспечение условий для проведе-
ния внезапной атаки ударной группы. Чаще других при демонстрации ложных
намерений применяют следующие тактические приемы: расчленение боевого
порядка противника, увлечение его за собой к району расположения ударной
группы и размыкание звена на пары по направлению и высоте после имитации
лобовой атаки. В наиболее выгодных условиях в бой вступает ударная группа.
Атака требует тщательной подготовки летного состава и расчета КП. Обяза-
32
тельными элементами подготовки атаки являются планирование и розыгрыш
различных вариантов группового воздушного боя, определение посильных за-
дач группам различного тактического назначения, порядка взаимодействия, ус-
тановление рубежей ввода в бой, направления атак и его обеспечения.
Исходя из боевых задач, выполняемых истребителями ПВО, рассмотрим
некоторые особенности и способы ведения воздушного боя с различными ти-
пами средств воздушного нападения противника.
Принципиальными особенностями ведения боя со стратегической авиа-
цией противника группами истребителей ПВО являются:
• комплексное совместное использование информационных средств каждо-
го борта и группы с максимальных дальностей обнаружения самолетов
противника;
• сближение с противником в бою по согласованным траекториям на пре-
дельных параметрах боевых порядков истребителей в группах;
• согласованное применение ракет основного боекомплекта с максималь-
ных дальностей, в том числе с реализацией режима передачи управления
пущенными ракетами в группе;
• при необходимости организация повторной атаки в ЗПС целей с приме-
нением дополнительного вооружения;
• снижение собственных потерь за счет использования бортовых средств
радиоэлектронного противодействия, режимов противоракетной оборо-
ны, рациональных боевых порядков и маневра, скрытности функциони-
рования информационных средств.
Организация боевых действий в смешанных группах построена адекватно
возможностям истребителей и их систем:
• командиром объединенной группы (КОГ) целесообразно назначать лет-
чика на истребителе дальнего действия, командирами групп (КГ), ведо-
мыми в группах, - летчиков на истребителях как общего назначения, так
и дальнего действия;
• обмен информацией о собственном положении и целях и передача ко-
манд управления осуществляются с помощью аппаратуры передачи дан-
ных. телекодовой связи и радиотелефона.
Командир объединенной группы планирует совместные боевые действия,
осуществляет целераспределение и контроль ведения боя. Ведомые после об-
наружения целей собственными БРЛС или получения целей для атаки от КОГ
(КГ) проводят бой с противником в соответствии с указаниями командиров
групп и рекомендациями инструкции по боевому применению.
Отличительными особенностями ведения боя смешанной группы истре-
бителей с группой стратегической авиации противника являются:
• совместное использование информационно-прицельных средств и
средств управления оружием в разных частотных диапазонах для обеспе-
чения высокой помехоустойчивости радиоэлектронных систем группы в
условиях радиоэлектронной борьбы;
• нанесение первого ракетного удара в ППС с максимальных дальностей
истребителями дальнего действия и эффективное ведение маневренного
33
3-4094
боя на средних и малых дальностях самолетами общего назначения с дез-
организованными фрагментами налета противника;
• организация постановки помех радиоэлектронным системам противника
одновременно в нескольких частотных диапазонах для снижения собст-
венных 'потерь истребителей.
После выхода истребителей ПВО, действующих в составе объединенной
группы, в боевое соприкосновение с противником КОГ анализирует воздуш-
ную обстановку по данным командиров групп, обнаруживает противника,
уточняет задачи всем группам на ведение боя и выполняет целераспределе-
ние. Группы истребителей ведут бой с одиночными и групповыми назначен-
ными целями в соответствии с рекомендациями по одному из заранее разра-
ботанных вариантов боя. Примеры таких тактических приемов приведены на
рис. 1.1.5. КОГ контролирует и корректирует хоЛ групповых боев, при необ-
ходимости вступает в бой во главе своей группы.
Атака СБ парой МиГ-31 с разных направлений,
исключающих одновременный обстрел
Рис. 1.1.5. Тактические приемы ведения дальнего воздушного боя истребительных
комплексов ПВО со стратегической авиацией
Выбор истребителями ПВО способов ведения борьбы с тактической
авиацией противника, обеспечивающей действия ударных самолетов, опреде-
ляется в значительной степени соотношением тактических возможностей ис-
требителя данного типа и самолетов противника в одиночном бою, возмож-
ностью наращивания преимущества истребителя за счет взаимодействия в со-
ставе группы (рациональные боевые порядки и наряд истребителей, передача
управления пущенной ракетой взаимодействующему истребителю с уклоне-
34
пнем от атакующих ракет противника, взаимная и групповая защита средст-
вами радиоэлектронного противодействия, пассивные методы локации), а
также возможностью противника по обеспечению боевых действий его
средств воздушного нападения в составе группировки.
Анализ воздушных боев в локальных войнах показывает, что основные
принципы ведения воздушного боя, применения того или иного маневра в
воздушном бою из арсенала Великой Отечественной войны остаются в силе с
учетом достижения технического совершенства истребителей. Следует также
отметить широкое применение типовых приемов (боевых маневров), модели
которых разрабатывались (проектировались) заранее и отрабатывались в ходе
тренировки. Каждый соответствовал конкретной наступательной или оборо-
нительной исходной ситуации, носил короткое и звучное название, которое
использовалось как команда, подаваемая ведущим в воздухе. Методика при-
менения стандартных приемов позволяет упорядочить действия летчика и
выработать автоматические рефлексы на знакомые вводные при острой не-
хватке времени. Благодаря быстрому реагированию на заученную обстановку
становилось возможным обдумывание последующих действий в бою, кото-
рые уже не поддаются моделированию из-за большого разнообразия.
В дальнем воздушном бою с истребителями прикрытия авиационные
комплексы могут применять тактические приемы, обеспечивающие им
скрытный выход в область возможных пусков ракет большой дальности.
Примерами таких тактических приемов могут быть следующие.
"Лобовой удар" отряда (звена) истребителей (рис. 1.1.6). Первая пара
истребителей выполняет координированную атаку целей с интервалом
J = 50...60 км, чем обеспечивается нанесение упреждающего удара, затрудня-
ется возможность маневра самолетов противника по фронту для уклонения от
ракет большой дальности истребителей и навязывания истребителям ближне-
го маневренного боя, снижается эффективность средств радиоэлектронной
борьбы противника. Вторая пара отряда (звена) выполняет одновременную
атаку во фланг самолетов противника под ракурсом 2/4^3/4 в боевом порядке
"фронт" J = 3...5 км. Принижение между парами АН = 3...5 км.
Рис. 1.1.6. "Лобовой удар" отряда (звена) истребителей ПВО
35
3-
Рис. 1.1.7. "Лобовой удар" пар истребителей ПВО
"Лобовой удар" пар истребителей (рис. 1.1.7). Пары истребителей
выполняют последовательную атаку с одного (разных) направления в боевом
порядке "фронт пар" с интервалом J = 50...60 км между парами. Боевой поря-
док самолетов в парах- "колонна самолетов" с дистанцией между ними
D = 30...60 км. Кроме рационального боевого порядка истребители применя-
ют следующие меры наращивания тактического преимущества в группе,
помеховое прикрытие атакующих ведущих истребителей с борта ведомых,
передача управления пущенными ведущими истребителями ракетами ведо-
мым и уклонение ведущих от атакующих ракет противника, триангуляцион-
ный метод определения дальности в условиях помех.
"Удар во фланг" пар истребителей (рис. 1.1.8). Первая пара осуще-
ствляет имитацию атаки целей путем принудительного включения режима
БРЛС "подсвет" без пуска ракет с последующим маневром по фронту в обход
зоны досягаемости ракет противника, увлекая за собой самолеты против-
ника, тем самым создавая благоприятные условия для атаки второй пары.
Первая пара следует в сомкнутом боевом порядке "пеленг" (J = 300...500 м
и D = 800...1000 м), вторая - в боевом порядке "фронт" с J = 3...5 км. Разне-
сение пар по высоте составляет АН = 3...5 км.
Рис. 1.1.8. "Удар во фланг" пар истребителей ПВО
36
Против истребителей противника, превосходящих по тактическим воз-
можностям истребительные комплексы, ДВБ ведется увеличенным нарядом
сил (тремя парами, двумя отрядами (звеньями)). Пары действуют в боевом
порядке "фронт" с интервалами между ними J = 50...60 км. Самолеты в парах
эшелонируются с разностью высот АН = 6 км. Такой боевой порядок исклю-
чает возможность одновременного обстрела одним истребителем противника
двух и более истребителей, создает условия для осуществления различных
тактических приемов ДВБ.
Стремление уничтожить противника с первой атаки было и остается ос-
новным принципом воздушного боя. С первой атаки было уничтожено три
четверти самолетов как в Великой Отечественной войне, так и в локальных
войнах. Однако не исключается, что ДВБ после первой атаки может законо-
мерно перерасти в ближний воздушный бой (БВБ) - во вторую фазу воздуш-
ного боя. Другим вариантом начала БВБ может быть вариант, когда против-
ник неожиданно появляется на небольшой дальности, исключающей немед-
ленное применение оружия.
Одним из важных этапов воздушного боя с тактической авиацией про-
тивника является боевое маневрирование между атаками (фактически это и
есть сам БВБ), т. е. быстрое изменение направления и высоты полета, смена
фигур пилотажа в высоком темпе, предельные перегрузки, огонь с коротких
дистанций. Главным принципом, обеспечивающим возможность построения
активной обороны при маневрировании, считается более высокая тяговоору-
женность самолета. Для достижения победы в БВБ маневренность и управ-
ляемость самолета должны обеспечивать более быстрое наведение бортового
оружия, чем у противника. При наличии автономного оружия типа "выпустил
и забыл" это преимущество должно быть таким, чтобы противник был унич-
тожен до того, как он успел применить свое оружие.
Ведение борьбы с самолетами связи, управления, разведки, радиоэлек-
тронной борьбы истребителями ПВО имеет ряд особенностей и требует от
летного состава высокой боевой выучки и тактической подготовки. Это свя-
зано с тем, что они, как правило:
• находятся вне зон видимости наземных РЛС;
• совершают барражирование вдоль линии фронта (государственной гра-
ницы), находясь над своей территорией;
• обладают наиболее полной информацией о противнике и широким спек-
тром средств радиоэлектронной борьбы;
• имеют сильное авиационное прикрытие.
Для ведения борьбы с данным типом целей основной формой противо-
борства сторон является групповой воздушный бой с применением групп раз-
личного тактического назначения (ударные, демонстративные, завязки боя с
истребителями прикрытия). Групповые действия осуществляются группами
смешанного состава, где истребители дальнего действия, как правило, ведут
ДВБ и осуществляют управление объединенной группой, а истребители об-
щего назначения ведут как дальний воздушный бой, тдк и ближний манев-
ренный бой. Основной задачей истребителей ударных групп является обна-
ружение и скрытый выход в область возможных пусков ракет большой даль-
37
ности. В настоящее время имеется ряд тактических приемов борьбы с данным
типом целей. Типичным примером может служить тактический прием воз-
душного боя "этажерка" (рис. 1.1.9).
Этот прием стал возможен благодаря наличию на борту истребителя
МиГ-31 многоканальной РЛС и аппаратуры, позволяющей координировать
действия всей группы (объединенной группы) по времени, высотам и направ-
лениям выхода в боевое соприкосновение с самолетами противника. Ударные
группы осуществляют сближение с целью по согласованным траекториям на
предельных параметрах боевых порядков. Первая пара выполняет полет в
стратосфере на высоте, близкой к максимальной, при сверхзвуковой скорости
и проводит координированную атаку цели сверху вниз. Вторая пара осущест-
вляет полет к цели на предельно малых высотах для данного типа самолета на
максимально допустимой скорости, используя рельеф местности и наиболее
уязвимые участки прикрытия для обнаружения цели и атаки ее снизу вверх.
Остальные самолеты группы, эшелонированные по высоте, ведут бой с истре-
бителями прикрытия, дезорганизуя боевые порядки противника и создавая
условия для прорыва третьей ударной группы во главе с командиром группы
к цели. Количественный состав групп зависит от важности цели и определя-
ется решением командира.
Рис. 1.1.9. Тактический прием "этажерка"
Способы выхода группы истребителей в боевое соприкосновение с целя-
ми - командное наведение, бортовое наведение, бортовой поиск ведущего
группы (ведомые истребители при этом занимают и выдерживают, в том чис-
ле автоматически, боевой порядок группы по командам ведущего). Атаки це-
лей истребители группы осуществляют по целеуказанию с ведущего группы
(в результате произведенного ведущим целераспределения) - 1x1, IxN, 2x1,
2xN или самостоятельно (по разрешению, согласованию с ведущим) 1x1,
IxN. Атака2x1 может выполняться следующими способами:
38
• одновременно (последовательно) с разных (одного) направлений, в том
числе при целеуказании с одного истребителя на другой по аппаратуре
передачи данных с включением на нем БРЛС на дальности до цели, срав-
нимой с максимально возможной дальностью применения оружия
(^вклБРДС ~ Dpmax ),
• под прикрытием помех с взаимодействующего истребителя;
• с передачей управления ракетой в полете взаимодействующему истребите-
лю;
• с имитацией атаки одним из истребителей путем принудительного вклю-
чения режима БРЛС "подсвет" без пуска ракеты;
• с применением триангуляционного метода определения дальности при
атаке цели - постановщика активных помех.
Боевые порядки ударных групп строятся так, чтобы обеспечить:
• применение режимов триангуляционного и кинематического методов оп-
ределения дальности;
• возможность передачи управления ракетой в полете взаимодействующе-
му истребителю;
• возможность прикрытия помехами атакующего истребителя с борта
взаимодействующего истребителя;
• реализацию режима "Сброс" - автоматической передачи с борта истребителя
на наземный (воздушный) пункт управления информации о целях, сопрово-
ждаемых БРЛС истребителя и принятых на борту ведущего от ведомых.
Система способов выхода в боевое соприкосновение с воздушным про-
тивником авиационных подразделений (в том числе смешанных групп) явля-
ется единой для действий как по пилотируемым (самолетам стратегической и
тактической авиации), так и по беспилотным средствам воздушного нападе-
ния противника, в том числе по стратегическим крылатым ракетам (СКР).
Основной особенностью применения этой системы в условиях борьбы со
стратегическими крылатыми ракетами является доминирующее использова-
ние режимов бортового наведения и бортового поиска, поскольку вероятность
получения регулярной информации о малоразмерных целях на предельно ма-
лых высотах от радиолокационных постов или АК РЛДН в АСУ всех уровней
крайне ограничена.
Основными особенностями выполнения атак стратегических крылатых
ракет являются:
• использование однородных групп истребителей;
• использование главным образом многоканальных БРЛС для обнаружения
и сопровождения целей, а также информационного взаимодействия в
группе и с внешними системами;
• выполнение атак в зонах ответственности при прямолинейном полете ис-
требителей на встречных курсах со стратегическими крылатыми ракетами
и с применением главным образом ракет большой дальности;
• пространственное уклонение от зоны подрыва стратегических крылатых
ракет на параметре, на превышении или на маневре.
39
Основным способом уничтожения целей типа СКР является атака в ППС
под ракурсом 0/4 ч- 1/4 с превышением над целью до 10 км на скорости
950... 1050 км/ч. Наведение на цель, как правило, осуществляется из зоны де-
журства в воздухе, а при достаточной глубине оповещения - заблаговремен-
ным выводом истребителя в исходную точку наведения. При недостаточном
радиолокационном поле или полном его отсутствии целесообразна организа-
ция самостоятельного поиска СКР группами истребителей дальнего действия
в заданном районе. Помимо описанных ранее способов самостоятельного по-
иска целей "заслон", "треугольник", "баттерфляй" целесообразно использо-
вать способы поиска целей, показанные на рис. 1.1.10.
Рис. 1.1.10. Способы самостоятельного поиска целей:
ИТН - исходная точка наведения; ЗДВ - зона дежурства в воздухе;
Руб. обн., Руб. захв., Руб. пуска - рубежи обнаружения, захвата, пуска
Пара истребителей осуществляет поиск СКР по двум прямоугольным
маршрутам в заданном районе с двумя разворотами на 180°. Маршруты сим-
метричны относительно вероятной оси полета цели. Поиск осуществляется на
40
встречно-пересекающихся курсах, построенных так, чтобы угол их пересече-
ния совпадал с оптимальным углом поиска. Поиск может осуществляться па-
рой или отрядом (звеном) в зависимости от необходимого наряда сил. Траек-
тория истребителей при поиске на крейсерской скорости "прямолинейная"
или "змейка".
Для повышения эффективности истребителей при поиске и атаке обнару-
женных СКР в боевой порядок отряда включают поисково-ударную и удар-
ную группы, расположенные в районе поиска в два эшелона с организацией
двух зон дежурства в воздухе. Дистанция между парами выбирается из усло-
вий обеспечения устойчивой связи по аппаратуре передачи данных, безопас-
ности при пуске ракет и возможности передачи взаимодействующему истре-
бителю вновь обнаруженной цели для атаки. На этапе самонаведения на цель
истребитель выполняет горизонтальный полет. После атаки реализуется так-
тический отворот от цели на угол 45...50°, выдерживается заданный пеленг
до окончания подсвета цели, после чего выполняется отворот в сторону от
цели с максимальной перегрузкой.
Таким образом, если говорить в целом о воздушных боях современных
истребителей ПВО со средствами воздушного нападения противника, то они
значительно отличаются от воздушных боев периода Великой Отечествен-
ной войны и последующих локальных войн. Существенно вырос диапазон
высот и скоростей полета истребителей, а следовательно, расширились про-
странственные рамки воздушного боя, что заставило пересмотреть методы
управления им.
Использование аппаратуры передачи данных и определения координат
привело к дальнейшему расчленению боевых порядков и наложило отпечаток
на организацию взаимодействия между группами различного тактического
назначения; появилась возможность строить боевые порядки вне визуальной
видимости, а также применять группы смешанного состава.
Совершенствование ракет как большой дальности, так и ближнего воз-
душного боя привело к увеличению области возможных атак, альтернативой
этому стало появление режимов сверхманевренности истребителей.
Оснащение истребителей многоканальными РЛС большой дальности по-
зволило значительно расширить диапазон высот и скоростей уничтожаемых
целей. Помешать этому призваны средства радиоэлектронной борьбы, ис-
пользование которых прочно вошло в тактику воздушного боя.
В настоящее время новые требования предъявляются к тактическому
мышлению летчика, к быстроте его реакции на поток различной информации.
Конечно, автоматизация решения ряда боевых задач избавила летчика от мно-
гих процессов, связанных с немедленной реакцией и управлением, но не ос-
вободила от необходимости думать. Воздушный бой остался борьбой умов, и,
чтобы одержать победу, воздушный боец должен постоянно пополнять свой
тактический арсенал новыми знаниями для противопоставления противнику
более эффективной атаки.
Выбор наивыгоднейших тактических приемов и боевых маневров стал
наиболее успешно осуществляться в ходе моделирования воздушного боя.
Моделирование боевого полета, и особенно главного его этапа - воздушного
41
боя, предоставляет возможность выбора такого варианта, который позволил
бы с наибольшей эффективностью выполнить поставленную боевую задачу.
Оно позволяет определить целесообразные варианты завязки дальнего и
ближнего боя, выполнения боевого маневра, а также выхода из боя. Однако
важно вспомнить, что летчик - составная часть системы авиационного истре-
бительного комплекса. Организуя воздушный бой, необходимо учитывать,
что его ведет человек с присущим ему интеллектом, его способностью при-
нимать обоснованные решения в нестандартной обстановке. Самолет может
обладать большими возможностями, но они используются ровно настолько,
насколько позволяют уровень подготовки и опыт летчика.
Способы боевого применения истребителей ПВО 80-90-х годов базиру-
ются на принципах и способах боевого применения истребителей предыдущих
поколений, являются их дальнейшим развитием, связанным с новыми качест-
вами и дополнительными боевыми возможностями, обусловленными как дора-
ботками старых, проверенных годами авиационных систем, так и внедрением
принципиально новых, использующих современные технологии, систем.
Перспективой дальнейшего развития истребительных комплексов ПВО и
их боевого применения является многофункциональность. Современные
взгляды на использование авиации ПВО предусматривают их применение не
только для завоевания превосходства в воздухе, но и для борьбы со средства-
ми нападения как в ближнем космосе (гиперзвуковые самолеты, баллистиче-
ские ракеты), так и по наземным (морским) целям.
1.2. Взаимодействие АКП с единой системой
управления авиацией ПВО*
1.2.1. Единая система управления авиацией ПВО
Структура единой системы управления
Единая система управления авиацией ПВО обеспечивает управление
авиационным комплексом перехвата (АКП) на всех этапах его полета, начи-
ная от подготовки и выполнения взлета, полета в зоне аэродромных средств,
выполнения заданной боевой задачи и завершая приводом самолета в зону аэ-
родрома и обеспечением его посадки.
Управление АКП на разных этапах его полета производится с различных
командных пунктов (КП), входящих в единую систему управления и имею-
щих локальную зону ответственности, с передачей управления между ними
по мере выхода АКП из их поля воздушной связи.
Процесс управления с наземных КП боевыми действиями истребительной
авиации можно разделить на три основных этапа - предварительное планиро-
вание, непосредственное планирование, реализация плана.
В соответствии со структурой управления войсками и опытом боевого
применения истребительной авиации система управления боевыми действия-
ми авиации ПВО должна иметь иерархическую структуру, обеспечивающую
распределение задач управления между КП различных уровней и подчинение
младших КП старшим. При этом на старшие КП возлагается задача предвари-
тельного планирования, а на подчиненные младшие и истребители - задачи
непосредственного планирования и реализации плана. В качестве типовой
может быть рассмотрена структура единой системы управления истребитель-
ной авиацией зоны ПВО, представленная на рис. 1.2.1.
АСУ состоит из отдельных элементов с комплексами средств автоматиза-
ции (КСА), объединенных каналами передачи данных. Единая система управ-
ления имеет, как правило, четыре горизонтальных уровня иерархии:
• первый уровень - центр боевого управления авиацией зоны ПВО;
• второй уровень - центр боевого управления авиацией района ПВО;
• третий уровень - центр боевого управления авиацией;
• четвертый уровень — пункт боевого управления авиацией, пункт наведе-
ния (ПН), командно-диспетчерский пункт аэродромной зоны или старто-
во-командный пункт аэродрома базирования.
* В написании подразд. 1.2 принимал участие А. И. Тимофеенко.
43
Рис. 1.2.1. Типовая структура единой системы управления авиацией ПВО
(КСА комплекс средств автоматизации, КП командный пункт)
В зависимости от состава группировки средств района ПВО система
управления может быть и трехуровневой, без центра боевого управления
авиацией с организацией прямых связей центра боевого управления авиацией
района с пунктом боевого управления авиацией (ПН) и командно-
диспетчерским пунктом или стартово-командным пунктом.
На верхнем уровне управления производится предварительное планиро-
вание, основными задачами которого являются:
• обеспечение частей через материально-техническую службу и тыловые
пункты управления самолетами, боеприпасами, топливом и т. п.;
• задание необходимой степени боеготовности частей;
• назначение резерва;
44
• задание основных параметров автоматизированного управления боем
(степени воздействия, параметров отбора целей).
Непосредственное планирование боевых действий НА производится в
центрах боевого управления авиацией района ПВО и его частей. Основными
задачами этого планирования являются:
• приведение частей в заданную степень боевой готовности;
• вскрытие замысла противника и формирование общей тактики отражения
налета на прикрываемом участке;
• планирование боевых действий истребителей по конкретным целям с
формированием необходимых нарядов истребителей;
• отбор целей для боевых действий центра боевого управления авиацией;
• управление боевыми действиями пункта боевого управления авиацией
(ПН) с передачей управления АКП им при необходимости;
• организация взлета (посадки) истребителей через командно-диспетчер-
ский пункт или стартово-командный пункт.
Реализация планов, т. е. непосредственное управление экипажами истре-
бителей с обеспечением определенной безопасности их полетов, производит-
ся с пункта боевого управления (ПН) через узлы воздушной радиосвязи,
обеспечивающие радиотелефонную связь и передачу на борт информации.
Современные истребители имеют большие радиусы действия и для не-
прерывного управления ими в зоне ПВО должно быть создано на основе со-
вмещенных с пунктом наведения и вынесенных радиостанций поле воздуш-
ной радиосвязи, обеспечивающее устойчивый телекодовый и радиотелефон-
ный обмен с бортами.
Система управления ИА ПВО должна обеспечивать рациональные соче-
тания централизованного управления с автономным функционированием от-
дельных элементов АСУ. Все старшие КП авиации района ПВО (центр боево-
го управления авиацией района, центр боевого управления авиацией) наряду с
основными задачами по управлению боевыми действиями подчиненных
средств (отбору для них целей и координации их действий) имеют возмож-
ность непосредственно управлять истребителями, решая задачи пункта боево-
го управления (пункта наведения).
Для того чтобы истребители могли эффективно вести боевые действия, не-
обходимо, во-первых, постоянно поддерживать их боеготовность и готовность
аэродромов, во-вторых, обеспечивать быстрое выполнение распоряжений КП,
управляющего боевыми действиями истребителей, на перевод их в заданные
степени боеготовности, на взлет и, наконец, в-третьих, обеспечить с помощью
аэродромных средств полет истребителей в аэродромной зоне и их посадку.
В структуре единой системы управления решение указанных задач возлагается
на стартовый командный пункт аэродрома, командно-диспетчерский пункт и
средства автоматизации батальона аэродромно-технического обслуживания.
Для обеспечения самолетовождения в условиях отсутствия командного
управления истребителями со стороны ПН в зоне полетов ИА должно быть
создано поле навигации с использованием наземных и космических систем.
Безопасность полетов в системе управления обеспечивается радиолока-
ционным контролем трасс истребителей, учетом расхода топлива при выпол-
45
нении боевых задач, планируемым обходом опасных зон и взаимодействием
со средствами радиоэлектронного противодействия и ЗРК при планировании
и реализаций боевых задач.
Радиолокационное обеспечение элементов системы управления поступает
от КП частей радиотехнических войск различных уровней и аэродромных РЛС.
Принципы функционального взаимодействия
единой системы управления с АКП
Единая система управления истребительной авиацией при управлении
АКП должна обеспечивать выполнение им поставленной боевой задачи и со-
хранение его живучести. Взаимодействие между управляющим КП единой
системы управления и АКП осуществляется путем обмена данными и нефор-
мализованными сообщениями по телекодовой радиолинии и радиотелефон-
ной связи на основе рационального разделения задач между наземными КП
и экипажем истребителя в соответствии с их информационным обеспечением.
Взаимодействие между АКП и единой системой управления имеет место,
начиная с момента постановки задачи и в течение всего полета - от взлета до
посадки. В зависимости от этапа выполнения и вида боевой задачи характер
взаимодействия различен.
На этапе подготовки к вылету средства автоматизации отдельного ба-
тальона аэродромно-технического обслуживания обеспечивают заправку ис-
требителей топливом и боекомплектом, подготовку самолетов и экипажей к
повторному вылету, готовность аэродрома к выполнению полетов.
В соответствии с распоряжениями центра боевого управления авиацией
формируются наряды истребителей и приводятся в заданную степень боего-
товности, выдается команда на запуск двигателей и выруливание, взлет (по го-
товности), данные о режиме полета и курсе отхода от аэродрома после взлета.
На этапе взлета и полета в аэродромной зоне управление АКП произво-
дится с командно-диспетчерского пункта или стартово-командного пункта
аэродрома базирования с использованием радиотелефонной связи. Контроль
полета АКП в аэродромной зоне осуществляется на стартово-командном (ко-
мандно-диспетчерском) пункте с помощью аэродромных РЛС с необходимой
корректировкой маршрута в интересах безопасности. Сбор истребителей
группы после взлета производится ее командиром в заданном районе аэро-
дромной зоны.
После отождествления на радиолокационном узле РТВ трассы истребите-
ля руководитель полета сообщает на борт радиоданные телекодовой связи и
радиосвязи принимающего управление центра боевого управления авиацией
(пункта боевого управления) и передает команду летчику о переходе на связь
со штурманом наведения центра боевого управления авиацией (пункта боево-
го управления).
Современные пункты наведения при взаимодействии с истребителями
обеспечивают решение следующих задач:
• дежурство в воздухе;
• наведение на воздушную цель из положения дежурства на аэродроме или
из зон дежурства в воздухе;
• проводка по маршруту;
46
• проводка по маршруту для расчистки воздушного пространства;
• вывод на назначенный рубеж для последующего сопровождения других
родов авиации;
• вывод в район топливозаправщика;
• поиск по пеленгу на постановщик активных помех;
• привод на аэродром посадки;
• организация приема-передачи управления;
• обеспечение безопасности полета.
Управление полетом истребителя осуществляется либо способом ко-
мандного наведения с выдачей на борт заданных значений курса, скорости и
высоты полета, либо способом полуавтономных действий, когда на борт пе-
редается информация о цели, а команды, определяющие полет АКП, форми-
руются на борту.
Пункт боевого управления (ПН) обеспечивает выдачу команд по радио-
линии управления для одиночного истребителя или для ведущего (командира)
группы. Управление внутри группы (информационное, траекторное, огневое
и помеховое взаимодействие) осуществляет ее командир. Вопрос о распреде-
лении задач между наземным пунктом боевого управления и бортом истреби-
теля при организации наведения постоянно уточняется по мере совершенст-
вования бортовых технических средств. Для существующих комплексов зада-
ча наведения в основном решается на наземном пункте боевого управления,
имеющем сравнительно высокое информационное обеспечение, мощные вы-
числительные ресурсы и более низкую загруженность лиц боевого расчета по
сравнению с бортом (летным экипажем). Функциональное взаимодействие
между АКП и наземной системой управления происходит следующим обра-
зом. После занятия на пункте боевого управления (ПН) канала наведения по
истребителю и появления его реальной трассы на борт передаются прираще-
ния географических координат его условной точки (относительно опорной) и
способ вывода в боевое соприкосновение. Через 40...50 с поступает инфор-
мация о типе боевой задачи, а через 60 с после этого - координаты истребите-
ля по данным информационного поля системы управления.
При типе боевой задачи "дежурство в воздухе" вывод в зону осуществ-
ляется либо курсовым способом, либо маршрутным управлением. Полет про-
изводится на крейсерской скорости и заданной высоте в соответствии с пере-
данными командами "Вертикаль-4" и величинами V, \|/, Н. При задании фигу-
ры барражирования четырьмя координатными точками облет производится в
порядке возрастания их номеров.
При типе боевой задачи "наведение" и способе выхода в боевое сопри-
косновение "командное наведение с координатной поддержкой" наряду с
курсовым набором (V, \|/, Нц) на борт с темпом 60 с поступает координатная
поддержка по цели. Задача выполняется поэтапно. На первом этапе, до при-
хода команды "Вертикаль", истребитель выполняет полет в вертикальной
плоскости по базовой программе набора высоты и скорости в соответствии с
заданным значением программной скорости и командой "Форсаж". Команда
"Полусфера атаки" формируется всегда по прогнозируемому направлению
атаки в момент решения задачи наведения методом "Маневр". Команда "Раз-
47
ворот" формируется только на этапе преднамеренного разворота. Разовые ко-
манды отражаются на экране табло бортовой системы индикации. Второй
этап наведения выполняется после прихода команды "Вертикаль" и ее вида
(атака по усмотрению пилота, атака снизу, атака сверху). При этом на борт
выдается величина Узад = УаТаки- Третий этап наведения характеризуется выда-
чей на борт команд целеуказания БРЛС и включения ее излучения. О резуль-
татах атаки летчик сообщает по радиосвязи или в составе спец-информации.
При типе боевой задачи "наведение” и способе выхода в боевое сопри-
косновение "бортовое наведение” на борт выдается только регулярная коор-
динатная поддержка по сопровождаемой воздушной цели. Сближение с це-
лью и последующая атака выполняются истребителем самостоятельно.
При типе боевой задачи "наведение" способ выхода в боевое соприкосно-
вение "бортовой поиск" назначается пунктом боевого управления или само-
стоятельно выбирается истребителем в случае прекращения поступления ко-
манд с земли (более 60 с) или их нерегулярной выдачи.
При типе боевой задачи "проводка по маршруту" (маршрутном управле-
нии) истребитель самостоятельно формирует траекторию полета, используя
информацию о маршруте, переданную ему пунктом боевого управления (ПН).
Проводка по заданному маршруту может производиться также курсовым спо-
собом путем передачи на борт \ЛИЛ, \|/ид, Н,ал. Траектория полета при этом
формируется пунктом боевого управления (пунктом наведения) на основании
введения в него точек маршрута. Скорость и высота полета по маршруту мо-
жет быть переменной (в допустимых пределах) и определяется заданными
значениями. В процессе проводки по маршруту команды целеуказания не вы-
рабатываются. Маршрут может вводиться на аэродроме взлета в процессе
предполетной подготовки в виде географических координат 8-9 пунктов,
один из которых можно оперативно менять в полете по указанию штурмана
наведения пункта боевого управления, получаемому летчиком по радиотеле-
фонной связи.
При типе боевой задачи "расчистка воздушного пространства" воз-
душное пространство задается координатами точек начала и конца.
При типе боевой задачи "сопровождение" вывод на назначенный рубеж
для последующего сопровождения самолетов других родов авиации произво-
дится методом командного наведения или маршрутного управления. При
маршрутном управлении точка рубежа отражается на индикаторе тактической
обстановки пилота. При подходе к сопровождаемой группе по указанию
пункта боевого управления летчик включает излучение БРЛС для обзора воз-
душного пространства. Приборное наведение заканчивается при установле-
нии контакта летчика истребителя с командиром сопровождаемой группы са-
молетов, который руководит его дальнейшими действиями.
В боевой задаче "координированное наведение" по решению пункта бое-
вого управления может быть организовано одновременное наведение не-
скольких истребителей (групп), находящихся в различных каналах наведения,
на одну воздушную цель. При этом для повышения эффективности атаки и
для парирования маневра цели наиболее рациональной является организация
координированной атаки, когда на пункте боевого управления обеспечивается
траекторное взаимодействие нескольких истребителей (групп) для реализации
одновременного выхода в атаку с заданными ракурсами.
48
При типе боевой задачи "привод" для реализации привода на аэродром
посадки пункт боевого управления формирует траекторию вывода истребите-
ля из точки текущего положения до точки передачи управления аэродромным
средствам.
Боевая задача "пеленг помехопостановщика" решается пунктом боевого
управления при измерении наземным источником радиолокационной инфор-
мации только азимутального угла (пеленга) на постановщик помех. Пункт
боевого управления передает на борт только команды наведения с заданием
режима командного наведения. Истребитель, отрабатывая \|/.1ад, Узад, Нзад, вы-
водится по кратчайшему расстоянию на линию, параллельную текущему пе-
ленгу на постановщик помех. При достижении расстояния до линии пеленга,
меньшего дальности обнаружения БРЛС, истребителю передаются команды
целеуказания со значениями команд, равными е = О, р = \|/зад. Летчик включает
излучение, и истребитель осуществляет поиск и обнаружение постановщика
помех бортовыми средствами.
При типе боевой задачи "вывод на топливозаправщик" для организации
топливозаправки истребитель выводится в назначенный район.
В процессе полета АКП при выполнении поставленных боевых задач с
борта может выдаваться по запросу пункта боевого управления информация о
воздушной обстановке по данным БРЛС при использовании командной ра-
диолинии управления (КРУ) типа "Радуга-75" (СВПК) или системы обмена
данными (СОД) ТКС-2М.
При запросе пункта боевого управления с борта АКП также может выда-
ваться полетная информация (бортовой номер, барометрическая высота и ос-
таток топлива) или специнформация о боекомплекте и ходе боевых действий
либо по обратному каналу систем активного запроса-ответа (САЗО) через на-
земную станцию КРУ типа "Радуга-75", либо в более полном объеме через
обратный канал системы обмена данными ТКС-2М.
При передаче управления истребителем другому пункту боевого управ-
ления передающий пункт предварительно доводит до сведения летчика ра-
диоданные канала КРУ и радиотелефонной связи (номер канала голосовой
связи), подлежащие установке на борту самолета. В зависимости от типа ко-
мандной радиолинии управления или системы обмена данными и бортового
оборудования истребителя перестройка телекодовой аппаратуры происходит
автоматически или вручную. Для автоматической перестройки с пункта бое-
вого управления выдается на борт набор команд взаимодействия с новыми
радиоданными. На борту истребителя прохождение команд взаимодействия
сопровождается звуковым сигналом в шлемофон пилота и соответствующей
индикацией на пульте аппаратуры, что обращает внимание пилота на необхо-
димость проверки прохождения команд наведения. Ручная перестройка осу-
ществляется пилотом в соответствии с данными от пункта боевого управле-
ния (ПН), полученными по радиотелефонной связи.
В процессе управления истребителями на пункте боевого управления ре-
шаются задачи, связанные с обеспечением безопасности управляемых само-
летов. Контроль нахождения истребителя в поле команд и голосовой радио-
связи осуществляется по всем истребителям, находящимся в каналах управ-
ления, и при выявлении возможности выхода истребителя из зоны действия
станции КРУ принимается решение о выдаче команд через вынесенную стан-
цию или передаче управления другому пункту боевого управления.
49
4-4094
Контроль достаточности топлива на борту осуществляется на пункте бое-
вого управления автоматизированно. При появлении на автоматизированном
рабочем месте (АРМ) оператора ПН справки о нехватке топлива для перехва-
та и возвращения на аэродром посадки оператор выясняет у летчика фактиче-
ский остаток топлива и, в случае необходимости, переводит истребитель на
привод или меняет аэродром посадки на ближайший к рубежу перехвата.
При реализации привода пункт боевого управления (ПН) формирует тра-
екторию вывода истребителя из точки текущего положения до точки передачи
управления аэродромным средствам посадки. Профиль полета содержит уча-
сток снижения (набора) с высоты атаки на крейсерскую высоту и участок
снижения на высоту передачи управления аэродромным средствам посадки с
одновременным торможением, переход на который производится по команде
"Снижение" с пункта наведения. При этом в наборе команд выдается V = У1ЮС,
Н = Нпос. Управление полетом в горизонтальной плоскости производится кур-
совым способом.
В случае потери связи с ПН или по его решению возможно выполнение
привода истребителя автономно с помощью бортовых средств и систем даль-
ней и ближней навигации.
Современные системы управления средствами
противовоздушной обороны
Интенсивное развитие средств воздушного нападения, возрастающая
сложность задач и стоимость борьбы вызвали необходимость создания ком-
плексной системы противовоздушной обороны, обеспечивающей управление
боевыми действиями зенитно-ракетных войск (ЗРВ), истребительной авиации
(ИА), радиотехнических войск (РТВ) и частей радиоэлектронной борьбы
(РЭБ). В последнее время к этому добавляются задачи тактической противо-
ракетной обороны [1.7].
Единая система управления авиацией ПВО может рассматриваться как
составная часть современной комплексной системы обороны.
В качестве основного системообразующего средства автоматизации
управления при создании системы воздушной обороны крупных регионов
применяется комплекс аппаратуры автоматизации командного пункта соеди-
нения ПВО "Универсал-1Э". Данный комплекс является по существу средст-
вом управления оружием - истребителями-перехватчиками и зенитно-ракет-
ными системами (комплексами) - непосредственно или через автоматизиро-
ванные КП соответствующих частей (подразделений).
Многофункциональный комплекс "Универсал-1 Э" предназначен для
автоматизации управления с командного пункта соединения ПВО боевыми
действиями подчиненных частей и подразделений зенитно-ракетных войск,
истребительной авиации, радиоэлектронной борьбы и радиотехнических
войск (рис. 1.2.2). Он обеспечивает:
• сбор, обработку и обобщение радиолокационной информации о воздушной
обстановке от подчиненных и взаимодействующих командных пунктов;
• управление резервами и боевой готовностью средств соединения ПВО;
• расчет соотношения сил в налете и выработку рекомендаций на принятие
решений на всех уровнях управления по отражению ударов средств воз-
душного нападения;
50
МиГ-31 А Су-27
КП иап
"Рубеж-МЭ"
МиГ-31 А Су-27
АК РПЛН
Станция передачи команд
'’Радуга-7511'’
Пункт наведения ИА
"Рубеж-2МЭ"
J
КП зенитно-ракетной бригады
(войсковой ПВО)
КП системы ПВО
КП соседних
соединений )1( ПВО
"Универсал-1Э"
А
Рис. 1.2.2. Структура автоматизации управления боевыми действиями соединения ПВО
51
4*
• управление боевыми действиями истребительной авиации, частей зенит-
но-ракетных войск и радиоэлектронной борьбы путем распределения их
усилий по целям, направлениям и зонам боевых действий;
• получение боевой информации подчиненными командными пунктами;
• управление отдельными пунктами наведения ИА, в том числе АК РЛДН А-50;
• управление групповыми полуавтономными действиями истребителей ти-
па МиГ-31 и Су-27;
• безопасность полетов истребительной авиации;
• взаимодействие с вышестоящими и соседними КП;
• оповещение КП других видов Вооруженных Сил и гражданской обороны;
• комплексную и автономную тренировку лиц боевого расчета.
В состав комплекса "Универсал-1Э" входят кабины: боевого управления,
управления истребительной авиацией, диагностики и регистрации информа-
ции, комплексной аппаратной связи, а также две дизель-элекростанции. Пере-
возка осуществляется своим ходом с использованием тягачей, железнодорож-
ным, авиационным и водным транспортом.
Боевое управление подчиненными частями ведется в реальном времени.
Благодаря высокой надежности и стойкости к внешним воздействиям, нали-
чию автономных систем энергоснабжения и жизнеобеспечения возможна
длительная непрерывная работа с поддержанием комфортных условий для
обслуживающего персонала в любых условиях эксплуатации.
С командного пункта соединения ПВО, оснащенного комплексом аппара-
туры автоматизации "Универсал-1Э", осуществляется управление различны-
ми частями и подразделениями:
• зенитными ракетными частями, оснащенными аппаратурой автоматиза-
ции "Байкал-1Э", "Сенеж-Э", "Сенеж-М1Э", "Вектор-2ВЭ", - до 12;
• авиационными частями, оснащенными аппаратурой автоматизации
"Рубеж-МЭ", "Эталон", - до 4;
• пунктами наведения авиации, оснащенными аппаратурой автоматизации
"Рубеж-2МЭ", "Сплав", "Сенеж-Э", "Сенеж-М1Э", "Вектор-2Э",
АК РЛДН А-50, - до 7;
• подразделениями радиоэлектронной борьбы, оснащенными аппаратурой
автоматизации, - до 3;
• радиолокационными частями (подразделениями), оснащенными аппара-
турой автоматизации "Нива-Э", - до 3;
• группами авиационно-ракетных комплексов перехвата Су-27, МиГ-31 в
режиме полуавтономных действий (с помощью одной-двух станций
"Радуга-СПК") - до 10.
Основные тактико-технические характеристики комплекса "Универсал-1Э"
Количество
одновременно управляемых частей ЗРВ, ИА, РЭБ, РТВ..................... 20
одновременно обрабатываемых воздушных объектов.................... 300
автоматизированных рабочих мест................................... 15
Время приведения в боевую готовность, мин............................ 5
Диапазоны обработки информации о воздушных объектах
по дальности, км.................................................... 3200
по высоте, км....................................................... 100
по скорости, км/ч.................................................. 6000
52
Автоматизированная система управления истребительным авиац и-
онным полком "Рубеж-МЭ" предназначена для управления боевыми дейст-
виями иап как в составе территориальной автоматизированной группировки,
так и в локальных группировках (рис. 1.2.3). Она обеспечивает:
• централизованное приведение средств в боевую готовность;
• прием, обработку и отображение на экранах автоматизированных рабо-
чих мест воздушной обстановки;
• автоматический прием от вышестоящего командного пункта распоряжений
и выдачу на него докладов о боевой готовности и боевых действиях полка;
• автоматизированное решение штурманских задач, задач целераспределе-
ния и перенацеливания, автоматизированную выдачу на стартовые ко-
мандные пункты аэродромов иап команд и распоряжений на боевые дей-
ствия истребителей-перехватчиков;
• управление и приборное наведение истребителей-перехватчиков на воз-
душные цели, привод самолетов на аэродромы базирования иап;
• контроль за безопасностью полетов истребителей;
• взаимодействие с соседними КП иап или КП зенитной ракетной бригады;
• автоматизированную выдачу команд управления источниками инфор-
мации:
• тренировку боевых расчетов без привлечения летных средств;
• вывод отчетных документов на печатающее устройство и фоторсгистрацию.
Рис. 1.2.3. Пункт наведения АСУ "Рубеж-МЭ1
53
В состав системы "Рубеж-МЭ" входят: командный пункт "Рубеж-1МЭ".
пункт наведения "Рубеж-2МЭ" (до 2), стартовый командный пункт "Рубеж-
ЗМЭ" (до 3) и автономная электростанция.
Количественно-технические данные системы "Рубеж-МЭ":
• одновременно управляемых истребителей-перехватчиков всех типов - до 20:
• аэродромов базирования истребителей-перехватчиков - до 3;
• одновременно управляемых вынесенных пунктов наведения - до 2;
• одновременно обрабатываемых воздушных объектов - до 76;
• время приведения в боевую готовность из дежурного режима - 3 мин;
• автоматизированных рабочих мест в кабине боевого управления - 4.
1.2.2. Назначение и состав технических средств АКП
и наземной системы управления,
участвующих во взаимодействии
Во взаимодействии АКП с наземной АСУ (ПАСУ) участвуют средства
связи и дешифрации команд наведения, обеспечивающих управление боевы-
ми действиями истребителей, и специальное оборудование для их ориентации
в пространстве и обеспечения посадки.
Управление боевыми действиями ИА производится с помощью системы
воздушной радиосвязи и передачи команд, которая, в общем случае, должна
обеспечивать:
• передачу на борт истребителя команд управления и прием с борта ответ-
ных сообщений;
• необходимую достоверность и имитостойкость телекодовой информации
и разборчивость голосовой речи в условиях организованных помех;
• возможность работы в закрытом режиме;
• обслуживание одной радиолинией достаточно большой авиационной
группировки с необходимой пропускной способностью канала;
• возможность ретрансляции сообщений за пределы радиогоризонта.
Существующие и перспективные средства воздушной связи и передачи
данных соответствуют этим требованиям в различной степени. Характерной
особенностью современного состояния средств воздушной радиосвязи явля-
ется наличие в составе НАСУ и на бортах истребителей двух типов передачи
телекодовой информации: командных радиолиний управления (КРУ) и сис-
тем обмена данными (СОД).
Существующие и разрабатываемые КРУ представляют собой односто-
ронние радиолинии передачи данных (команд наведения) в направлении
"пункт наведения —> борт" и не имеют обратного канала передачи данных на
ПН, который реализуется другими линиями связи. Технические средства КРУ
не могут ретранслировать сообщения, что ограничивает область управления
истребителем.
Для приема команд наведения, передаваемых по КРУ, на борту находится
радиоприемное устройство и аппаратура дешифрации (аппаратура радио-
управления), решающая следующие задачи:
54
• прием команд от НАСУ;
• декодирование, преобразование и отображение команд наведения и
управления на индикаторных (пилотажных) приборах с выдачей в борто-
вые вычислители, в том числе БЦВМ СУВ и ЦВТУ САУ.
Бортовая аппаратура КРУ "Радуга" дополнительно обеспечивает:
• прием и декодирование сигналов запроса станций САЗО;
• запуск шифратора самолетного ответчика;
• передачу полетной информации.
В качестве обратного канала, применяемого при работе с некоторыми
КРУ, используют самолетный ответчик с радиопередающим устройством сис-
темы госопознавания. В настоящее время в истребительной авиации ПВО при-
меняются находящиеся в эксплуатации КРУ "Лазурь-М", "Бирюза", "Радуга-
СПК-68", "Радуга-САЗО-СПК-75". В разработке находится "Радуга-СВПК".
Основные их характеристики приведены в табл. 1.2.1.
Таблица 1.2.1
Характеристики командных радиолиний управления
Общие сведения "Лазурь-М" "Бирюза" "Радуга- ПК-68" "Радуга- СПК-75П" "Радуга- СВПК"
Зона действия: - по дальности, км - по азимуту, град - по высоте, км 350 360 30 400 360 40 400 360 40 400 360 40 400 360 40
Максимальный объем команды, двоичные разряды 54 80 45 96 96
Количество обслуживаемых истребителей 3 12 12 30 36
Темп передачи команд, с 4,5 5 5 5 ... 10 10
Количество пунктов управления (наведения), одновременно использующих станцию 1 1 1 3 3
Условная помехозащищенность - 1 4 8 20
Вид диаграммы направленности Ненаправленная Направленная
Как видно из табл. 1.2.1, наиболее помехозащищенными являются КРУ
типа "Радуга" с направленной диаграммой антенны. Перспективными разра-
ботками этого семейства являются станция радиовизирования, передачи ко-
манд и приема информации "Радуга-СВПК", включающая систему САЗО-ГО
и аппаратуру передачи данных, и станция "Радуга-СПК-75П".
Станция передачи команд на борт истребителя-перехватчика "Раду-
га-СПК-75П" предназначена для определения координат (дальность, азимут)
55
и передачи команд управления истребителям типа МиГ-31, Су-27, МиГ-25,
МиГ-23, оснащенным бортовой аппаратурой наведения "Спектр-1", БАН-75.
Используется в составе территориальной, локальной автоматизированной
группировки, оснащенной системой управления истребительной авиации
"Рубеж-М(Э)". Станция передачи команд "Радуга-СПК-75П" (рис. 1.2.4)-
вторичный адресный радиолокатор в составе командного пункта или пункта
наведения - решает следующие задачи:
• принимает от трех КП (ПН) телекодовую информацию, преобразует ее и
хранит до момента передачи истребителям;
• производит поиск по индивидуальному номеру управляемого истребите-
ля, определяет факт его нахождения в диаграмме направленности антен-
ны, уточняет местоположение и определяет момент излучения;
• передает истребителю предназначенную для него информацию;
• получает по ответному каналу квитанцию о прохождении на борт истре-
бителя команд, производит повторную передачу при отсутствии кви-
танции;
• определяет по ответному сигналу полярные координаты истребителя, пе-
ресчитывает их в прямоугольные и выдает на КП;
• по запросу с КП (ПН) получает специальную информацию (индивидуаль-
ный номер, барометрическую высоту, запас топлива и др.) и выдает ее на
КП (ПН);
• определяет пеленги на источники активных помех;
• осуществляет оперативную командную связь с тремя КП (ПН).
Рис. 1.2.4. Антенна наземной станции командной радиолинии управления
"Радуга-СПК-75П"
Станция обеспечивает точность измерения дальности - 150 м, точность
измерения азимута - 1 град, точность получения барометрической высоты -
40 м; темп обзора - 10 с; количество одновременно управляемых истребите-
56
лей - 30. "Радуга-СПК-75П" включает антенно-поворотное устройство, высо-
ковольтный прицеп, технический прицеп (пост), машину запасного имущест-
ва, дизельную электростанцию.
Перспективным средством для построения системы воздушной связи яв-
ляются системы обмена данными (СОД), уступающие по помехозащищен-
ности и имитостойкости радиолинии "Радуга", но позволяющие организовать
разветвленную сеть обмена данными между пунктом боевого управления
(пунктом наведения) и истребителями в различных диапазонах радиоволн с
возможностью автоматической ретрансляции сообщений. Все СОД - радио-
технические системы с ненаправленным излучением, что существенно упро-
щает их конструкцию. В табл. 1.2.2 приведены основные характеристики
существующих и разрабатываемых систем обмена данными. Как видно из
табл. 1.2.2, наибольшей эффективностью обладает система ОСНОД, находя-
щаяся в стадии технической проработки и предварительных испытаний.
Характеристики систем обмена данными
Таблица 1.2.2
Характеристики АПД-518 ТКС-2 (ТКС-2М) ОСНОД
Назначение Межсамолетный обмен тслекодо- вой информацией Типовой комплекс связи для обмена те- лекодовой информа- цией Объединенная система связи, обмена данны- ми, навигации и опо- знавания
Виды сетей обмена данных СОД между само- летами с возмож- ностью выдачи данных с ведуще- го на ПБУ СОД между самоле- тами, между ПБУ и самолетами Сеть обмена всеми видами информации между самолетами, между самолетами и ПБУ, между ПБУ
Возможность закрытия Нет Есть Есть
Количество обслужи- ваемых абонентов 4 20 (пять групп по четыре) 1800
Объем сообщения, бит 900 1000 2048
Возможность автома- тической ретрансляции сообщений Нет Есть Есть
Диапазон частот ДМВ ДКМВ, МВ-ДМВ ДМВ
* ТКС-2М отличается от ТКС-2 циклограммой работы и составом передаваемой информации.
Применение терминалов систем ОСНОД в НАСУ позволит существенно
уменьшить количество связного оборудования и, в основном, обеспечит вы-
полнение всех требований, предъявляемых к системе воздушной связи. Одна-
ко разработанный образец бортового терминала превосходит по массогаба-
ритным характеристикам бортовой терминал ТКС-2. \
57
Бортовой комплекс ТКС-2 включает в себя радиоприемопередающее уст-
ройство, аппаратуру передачи цифровой информации со спецвычислителем,
который ^связан с пилотажно-навигационным комплексом и БЦВМ.
Аппаратура АПД-518 имеет аналогичное построение, но, являясь мало-
информационной, широкого применения не получила. Задачи, решаемые КРУ
и СОД по информационному взаимодействию пункта боевого управления
(ПН) с истребителями, приведены в табл. 1.2.3.
Таблица 1.23
Задачи обмена НАСУ - борт с использованием
командных радиолиний управления и систем обмена данными
Решаемые задачи "Лазурь-М" "Бирюза" "Радуга-68" "Радуга-75" "Радуга-СВПК" АПД-518 ТКС-2 ТКС-2М оснод
Передача на борт команд наведения + + + + + - - + +
Передача на борт воздушной обста- новки - - - - + - + + +
Передача на борт информации для маршрутного управления - + - + + + +
Передача на борт типов боевых задач - - - - + + +
Автоматизированный переход на дру- гой тип КРУ - + - + + - - -
Передача на борт формализованных сообщений - - + + + +
Радиотелефонная связь (цифровая) - - - - - - +
Передача в НАСУ с борта информа- ции о воздушной обстановке - - - + + т + + +
Передача в НАСУ с борта полетной и специальной информации - - - + + + + + +
Передача в НАСУ с борта донесений о ходе выполнения боевой задачи - - - - - + +
Передача в НАСУ с борта формализо- ванных сообщений - - - - + + +
Организация в существующих и разрабатываемых пунктах боевого управ-
ления (ПБУ) или пунктах наведения (ПН) радиотелефонной связи с истребите-
лями строится на одних и тех же принципах: использование каналов с фикси-
58
рованной настройкой - в пределах радиогоризонта - в диапазонах МВ-ДМВ,
вне пределов - в диапазоне ДКМВ. При этом виды излучения и сетка частот
бортовых и наземных радиостанций одинаковы, что обеспечивает связь штур-
манов наведения с самолетами различных видов Вооруженных Сил.
К недостаткам существующих средств радиотелефонной связи можно от-
нести:
• необходимость для каждого штурмана наведения иметь свою радиостан-
цию МВ - ДМВ-диапазонов;
• неудовлетворительную стойкость к воздействию организованных помех;
• невозможность работать в закрытом режиме на немодернизированных
самолетах.
Перспективным средством радиотелефонной связи являются терминалы
ОСНОД, которые позволяют организовать помехозащищенную закрытую
связь одновременно в четырех радиосетях, что обеспечивает снижение числа
радиосредств НАСУ.
При работе истребителей на малых высотах или на больших удалениях от
пунктов боевого управления (наведения) существенным требованием являет-
ся устойчивость и непрерывность связи.
Возможность ретрансляции сообщений в системах обмена данными
ТКС-2 и ОСНОД требует наличия летательных аппаратов на границах зоны
приема, что не всегда приемлемо. Более рациональным направлением следует
считать внедрение разработок по организации радиотелефонной связи через
спутниковый канал или радиосеть ДКМВ-диапазона с адаптацией.
1.2.3. Информационный обмен АКП с единой системой
управления при выполнении боевой задачи
Пункт боевого управления в процессе выполнения боевой задачи осуще-
ствляет формирование и передачу на борт истребителя команд, определяю-
щих программу полета для вывода в зону возможных атак (район боевых дей-
ствий) и обеспечивающих прицеливание (захват цели) системой бортового
оружия. Передача информации от пункта боевого управления на борт истре-
бителя осуществляется по радиолинии передачи цифровой информации раз-
личными наборами команд. Она организуется таким образом, что за один се-
анс связи передается один набор команд. Набор команд представляет сово-
купность плавных и разовых команд, признаков, необходимых для
выполнения самолетом поставленных задач, а также ряд служебных сообще-
ний. Для передачи командной информации разработан ряд унифицированных
наборов команд, структура которых различна для разных типов КРУ.
В существующих КРУ для командного наведения используются следую-
щие наборы команд: наведения, целеуказания, привода, перенацеливания,
взаимодействия. Наборы команд для организации полуавтономных действий
АКП- приращения географических координат условной точки, координат
АКП, координат и параметров движения цели.
59
В перспективных КРУ предлагаются новые наборы команд, уточняющие
информационное взаимодействие с АКП и унифицированные по разрядной
сетке входящих в них параметров с информационными массивами ТКС-2
аналогичного назначения. К ним относятся наборы:
• маршрутного управления (координаты точки маршрута);
• распоряжений на боевые действия (типов боевых задач);
• воздушного объекта (данные с пункта управления о тактической воздуш-
ной обстановке для предупреждения летчика о приближении самолетов
противника или своих истребителей и воздушная обстановка с борта по
данным БРЛС);
• параметров района полуавтономных действий;
• формализованных (стандартных) сообщений для вывода на индикатор и
бортовую аппаратуру речевых сообщений.
Основные команды, используемые в унифицированных наборах:
• наведения - заданный курс (трзад ), заданная скорость (V-ia;i), высота поле-
та цели (Н„) или заданная высота для истребителя (Н)ад), разовые команды
для выполнения вертикального маневра ("В"); признаки - включения
форсажа ("Ф"), излучения БРЛС ("И"), направления преднамеренного
разворота ("Р"), полусферы атаки ("П");
• целеуказания - дальность истребитель-цель (L), скорость сближения
с целью (VL), азимут цели (Р), угол места цели (е), разовые команды
дальности истребитель-цель ("DP"), все пилотажные команды набора на-
ведения;
• привода - заданный курс (\|/ зад), заданная скорость (Узад), заданная высо-
та полета (Нзад), признак выключения форсажа ("Ф"), признак снижения
до высоты передачи истребителя аэродромным средствам контроля и по-
садки ("СН"), признак преднамеренного разворота ("Р");
• перенацеливания - заданный курс (), заданная скорость (V.ia;i), высота
полета цели (Нц), признаки включения форсажа ("Ф"), направления пред-
намеренного разворота ("Р"), полусферы атаки ("П"); признаком перена-
целивания является номер набора команд перенацеливания;
• взаимодействия - номер радиоволны взаимодействия (NB), номер шифра
истребителя (Иш), номер разноса частот (Np);
• приращения географических координат — приращения широты (Д<р) и
долготы (АХ ) условной точки начала координат относительно опорной,
способ вывода в боевое соприкосновение (СВБС - КН, БН, БП), количе-
ство целей (п), полусфера атаки ("П");
• координат АКП- прямоугольные координаты X, Y, Н истребителя отно-
сительно условной точки, способ вывода в боевое соприкосновение
(СВБС), полусфера атаки;
• координат и параметров движения цели - прямоугольные координаты X,
Y, Н относительно условной точки, составляющие вектора скорости Vx,
Vy , способ вывода в боевое соприкосновение (СВБС), количество целей
(п) в группе, полусфера атаки.
60
Темп передачи команд наведения на борт истребителя определяется эта-
пом наведения и производительностью используемого КРУ (СОД). На ближ-
нем этапе наведения, когда курс истребителя может интенсивно меняться, тем
более на этапе целеуказания БРЛС при атаке в переднюю полусферу, темп
передачи на борт должен быть достаточно высок (5...10 с). Напротив, на даль-
нем этапе наведения и при отсутствии маневра цели курс истребителя меня-
ется мало и темп передачи может быть низким (20.. .30 с).
Производительность радиолинии передачи команд (обмена данными) ог-
раничивается числом обслуживаемых истребителей, которое определяется в
соответствии с возможностями КРУ (СОД) и требованиями контура наведе-
ния по темпу передачи команд. При использовании системы обмена данными
типа ТКС-2 или ОСНОД организуется двухсторонний обмен информацией
между пунктом управления и истребителем.
Обмен данными производится по принципу "запрос-ответ" путем вре-
менного разделения между пунктом боевого управления и командиром груп-
пы и частотного разделения различных групп. Организацию временного раз-
деления осуществляет пункт управления путем поочередной передачи сооб-
щений абонентам.
Бортовая система управления в зависимости от типа формуляра обраба-
тывает информацию, формирует текст сообщения на индикаторное устройст-
во и готовит ответное сообщение в соответствии со значением признака "Вид
ответа".
Информация обратного канала от АКП на пункты боевого управления в
системе ТКС-2М более расширена и детализирована. Существенно увеличен
перечень аварийных сообщений об отказах бортовых систем, донесений о ха-
рактере и результатах боевых действий, о составе бортового оружия. В мас-
сиве сетевого объекта наряду с данными о ведущем истребителе (координаты,
курс, скорость, остаток топлива) приводятся данные по составу группы, при-
знаки строя полета, готовности к атаке и т. п.
Проблемные вопросы взаимодействия АКП - НАСУ
В настоящее время идет непрерывное развитие принципов функциональ-
ного взаимодействия АКП с НАСУ, связанное с совершенствованием средств
цифровой связи, бортовых информационных и управляющих систем.
Создаваемые новые системы обмена данными АКП — НАСУ несовмести-
мы с существующими радиолиниями управления и требуют дополнительной
специальной аппаратуры на борту и земле. Отсутствие унификации техниче-
ских средств и информационных наборов команд ведет к усложнению борта и
наземной системы управления. Большая разнотипность командных радиоли-
ний управления и систем обмена данными не обеспечивает в ряде случаев ав-
томатизированный переход с одной системы на другую, что нарушает прин-
цип автоматизированного управления и требует ручных операций.
Проблемным вопросом является объем комплексирования на борту радио-
приемопередающих устройств. При использовании в канале КРУ и системе
61
СОД для обмена в группе одного и того же приемника пропадает связь с
пунктом боевого управления при переходе на внутригрупповой обмен. Рав-
ным образом теряется командная информация при переключении радиотракта
телекодовой связи на радиотелефонную связь летчика.
Одним из новых способов является маршрутное управление истребителем-
перехватчиком, при котором полет на навигационном этапе сочетается с по-
лучением по КРУ точек маршрута. В то же время ряд авиационных комплек-
сов в режиме "Навигация" не воспринимает команды по КРУ типа "Радуга",
что заставляет пользоваться радиотелефонной связью.
Проблемным вопросом является повышение информативности состава об-
мена АКП с НАСУ в условиях ограниченной производительности канала пе-
редачи и требований новых способов управления.
Рост возможностей современных БРЛС по обнаружению воздушных целей
расширяет применение АКП в качестве источника радиолокационной инфор-
мации для системы единого радиолокационного поля.
Список литературы к разделу 1
1.1. Корнуков А. М. Теория строительства новых ВВС. Независимое военное обозрение,
1998,№ 10.
1.2. Федосов Е. А. Военная авиация в начале XXI века. - Вестник авиации и космонавтики,
1999, весна.
1.3. Болдырев Ю. Объединенная ПВО: проблемы и решения. Военный парад, 1996, № 6.
1.4. Абрамов В. Н., Москвителев Н.И., Дуров В. Р. Боевое применение и боевая эффектив-
ность авиационных комплексов войск ПВО страны, - М.: Воениздат, 1979.
1.5. Дуров В. Р. Боевое применение и боевая эффективность истребителей-перехватчиков. -
М.: Воениздат, 1972.
1.6. Справочник офицера противовоздушной обороны / Под ред. Г. В. Зимина. - М.: Воениз-
дат, 1981.
1.7. Безель Я. Современные системы и средства противовоздушной и тактической противора-
кетной обороны. Военный парад, 1999, № 1.
1.8. Для защиты от воздушного нападения. - Военный парад, 1999, № 4.
раздел
Создание,
развитие
и применение
авиации ПВО
в послевоенный
периодЬ
С историко-научных позиций освещается развитие и применение авиации
ПВО в послевоенный период (50~70-е годы), использование научно-
технических достижений в истребителях 2-го и 3-го поколений. Приводятся
общие научные и методические основы создания истребительной авиации, в
том числе методы исследования боевых возможностей и эффективности
комплексов перехвата. Рассмотрена общая часть проблемы повышения бое-
вой эффективности истребителей, в том числе разработка аналитических
оценок показателей эффективности перехвата и воздушного боя, точности
стрельбы и прицеливания; освещена история создания прицелов, отработки
пушечного и ракетного вооружения. Показан рост боевых возможностей
истребителей, диапазонов высот и скоростей, зон возможных действий, зон
возможного перехвата, роль в этом научно-методической базы. При рас-
смотрении характеристик самолетов, состоявших на вооружении войск
ПВО страны в послевоенный период, обращается внимание в первую очередь
на их боевое применение и анализ боевых показателей. Приводятся летные,
тактико-технические данные и характеристики вооружения истребителей
ПВО начального этапа и специализированных перехватчиков 3-го поколения.
Описываются реальные боевые действия российских истребителей в локаль-
ных войнах; обобщается боевой опыт российской истребительной авиации.
2.1. Общие научные и методические основы
создания и применения истребительной авиации
Послевоенный период создания и развития самолетостроения в СССР, и в
частности авиации ПВО, характеризуется глубокой научно-технической ре-
волюцией, знаменующей собой наступление эпохи реактивной, а в после-
дующем ракетоносной авиации. В период с 1945 по 1975 год были разработа-
ны и приняты на вооружение истребители 2-го и 3-го поколений. В эти годы в
самолетных ОКБ совместно с НИИ и КБ было создано более 10 типов истре-
бителей различного назначения и десятки их модификаций.
Реактивный истребитель с жесткими требованиями по массе, прочности,
эффективности воплотил в себе передовые достижения научно-технического
прогресса и сам явился основой дальнейшего развития фундаментальных и
прикладных наук в различных отраслях знаний.
2.1.1. Научно-техническая база
прикладных разработок в авиации
Научно-технической базой создания и развития реактивной ракетной ис-
требительной авиации явились значительные достижения в таких областях
науки и техники, как аэродинамика, прочность авиационных конструкций,
авиационное материаловедение, двигателестроение, радиотехника, радио-
локация, вычислительная техника, эффективность и системные исследования.
В области аэродинамики были разработаны общие принципы компоновки
скоростных околозвуковых и сверхзвуковых самолетов, практические реше-
ния при проектировании отдельных элементов самолета (крыла, фюзеляжа,
оперения). В ЦАГИ были созданы специальные профили крыла, которые по-
зволили достигнуть больших скоростей полета и обеспечить хорошие свойст-
ва самолета на других режимах, особенно при посадке. Интенсивные работы,
проводимые ЦАГИ и другими НИИ, дали возможность в короткие сроки ре-
шить проблемы по преодолению затягивания самолета в пикирование, улуч-
шению управляемости, устранению колебаний различных видов и т. д.
Основное внимание при решении вопросов прочности было обращено на
учет влияния сжимаемости воздуха при нормировании нагрузок и при реше-
нии проблем аэроупругости, а также на разработку методов расчета на проч-
ность стреловидного крыла.
Движение летательного аппарата со сверхзвуковой скоростью полета вы-
зывает кинетический нагрев их поверхностей до высоких температур. Поэто-
65
5 - 4094
му вопросы прочности и жесткости конструкции при высоких температурах
стали важнейшими при разработке истребителей. В авиационные конструк-
ции начали внедряться новые материалы (титан и сталь).
Потребовалась разработка вопросов, связанных с определением темпера-
турных полей в конструкции летательного аппарата и с решением проблем
термоупругости и длительной прочности, вызванных ползучестью материала
при высоких температурах. В этот период складываются четыре раздела
инженерной науки о прочности и неизменяемости конструкции летательного
аппарата: нормы прочности, аэроупругость, статическая прочность, вынос-
ливость.
Развитие реактивной авиации поставило новые задачи по созданию кон-
струкционных материалов. Достижения в области создания жаропрочных
сплавов стали реальностью в результате многочисленных теоретических, экс-
периментальных и технологических работ. Особое место отводится теорети-
ческим вопросам, в первую очередь проблемам физики металлов и металло-
ведению. Ведутся работы по созданию материалов для реактивных двигате-
лей. В 50-е годы были созданы полимеры и другие связующие вещества, на
основе которых разработаны многие типы теплостойких полимерных мате-
риалов для изделий авиационной техники.
. Одной из важных проблем была разработка стеклопластиков конструк-
тивного и радиотехнического назначения, отвечающих высоким требованиям
прочности, радиопрозрачности, сохранения стабильных свойств в течение
длительной эксплуатации. Различные типы легких пенопластов на основе по-
листирола. полихлорвинила, полиуретана и др., разработанные в ВИАМе,
нашли широкое применение в конструкции самолетов.
Достижения в разработке новых конструкционных материалов явилось
базой для создания в середине 40-х годов отечественных газотурбинных дви-
гателей (ТРД, ТРДФ) для военных самолетов [2.1]. Первым отечественным
ТРД стал двигатель конструкции А. Л. Люльки ТР-1 с тягой 1350 кгс, про-
шедший Государственные испытания в 1947 г. Двигатель имел осевой ком-
прессор, кольцевую камеру сгорания, одноступенчатую турбину. На базе это-
го двигателя позднее были созданы ТРД АЛ-3, АЛ-5 с тягой 4500 ... 5000 кгс.
В ОКБ В. Я. Климова с участием ЦИАМ в 1948 г. был создан ТРД ВК-1
с тягой 2700 кгс, который стал самым массовым двигателем и устанавли-
вался на истребителях МиГ-15, МиГ-17. На этом двигателе впервые была
применена форсажная камера, что существенно улучшило характеристики ис-
требителя.
В ОКБ, руководимых А. М. Люлькой, А. А. Микулиным, В. А. Добрыни-
ным, совместно с ЦИАМ реализуются оригинальные научно-технические ре-
шения:
• в начале 50-х годов впервые применены сверхзвуковые ступени компрес-
сора (АЛ-7, РД-9);
• уменьшено число ступеней в компрессоре при одновременном уменьше-
нии его миделя (РД-11 -300);
• использованы осевые компрессоры, в том числе двухвальные.
66
В 1953 1954 гг. был внедрен в серийное производство ТРДФ РД-95, раз-
вивавший тягу 3300 кгс. Этот двигатель также имел сверхзвуковую первую
ступень компрессора и рекордно малый удельный вес (отношение массы к тя-
ге двигателя), у = 0,2.
Шестидесятые годы характеризуются созданием двухконтурных двигате-
лей с малой или умеренной степенью двухконтурности. Тяга наращивается
путем увеличения степени повышения давления, степени двухконтурности и
температуры газов перед турбиной. Основным техническим достижением в
этот период, помимо появления двухконтурных двигателей, было внедрение
воздушного охлаждения турбин, что позволило на 150...175 К увеличить
температуру газов перед турбиной и стало главным фактором прогресса авиа-
двигателестроения.
Если в двигателях 50-х годов температура газов перед турбиной была
900... 1100 К, то в 1977 г. она возросла до 1350... 1450 К, что улучшило харак-
теристики двигателя и уменьшило удельные расходы топлива. За эти годы
расход топлива снизился с 1,35 до 0,65 кг топлива/кгс тяги ч (на дозвуковой
скорости), а удельный вес двигателя уменьшился с 0,4 до 0,13...0,15 кг/кгс.
Габариты двигателя в результате уменьшения числа ступеней компрессора и
турбины сократились примерно в три раза, срок службы между ремонтами
возрос в 10 раз [2.1, 2.2].
По мере роста ЛТХ истребителей повысились требования к точности
управления траекторией полета самолетов с широкими диапазонами измене-
ний высоты, скорости, дальности. В условиях роста информационно-
логической загрузки экипажа и усложнения техники ручного пилотирования
выполнение этих требований шло путем введения в систему управления поле-
том бортовых вычислительных машин, выполняющих стандартные математи-
ческие и логические функции. Точность управления траекторией полета зави-
сит от точности определения текущих параметров полета и точности выра-
ботки величин воздействия на органы управления. Полнота и достоверность
сведений, поставляемых информационной моделью, повышается за счет про-
гресса по трем направлениям:
• совершенствование датчиков параметров;
• широкое использование принципов комплексирования датчиков;
• улучшение обработки данных.
Первые два направления начали формироваться еще в 50-е годы. Были
разработаны приборы, имеющие повышенные точности измерения парамет-
ров: радиовысотомеры малых (РВУМ и РВ-5) и больших (РВ-17) высот, авто-
матический радиокомпас (АРК-15), барометрические высотомеры ВМ-15 и
УВИД, указатель числа М и скорости (УСИМ), центральная гировертикаль
МГВ-1СУ и др. Характерной чертой в этот период явилось повышение точно-
сти информации, связанной с широким применением вычислительной техни-
ки для обработки данных. Специализированные вычислительные устройства
стали базой, на которой отдельные датчики объединялись в системы, логиче-
ски замкнутые и выполняющие определенные функциональные задачи:
• система высоты и скорости СВС, в которой электромеханическое счетно-
решающее устройство по сигналам датчиков первичных параметров и
67
5*
ручных задатчиков давления и температуры воздуха у поверхности земли
вычисляет и выдает на индикатор и в автоматическую систему следую-
щие сигналы: истинную воздушную скорость, относительную высоту по-
лета, число М, истинную температуру, относительную плотность воздуха,
скоростной напор;
• автоматические навигационные координаторы типа НВУ, НВ, ННУ, в ко-
торых счетно-решающее устройство вычисляет текущее положение само-
лета на основе координат исходного места и сигналов датчиков скорости
и направления полета.
В 60-е годы на самолетах получают распространение системы полуавто-
матического управления, в которых директорная информация предъявляется
на командно-пилотажном приборе (КПП).
Ускорился также процесс автоматизации функций принятия и исполне-
ния решений. Продолжилась автоматизация всех этапов и задач полета: взлет,
набор высоты, полет по маршруту, наведение на цель, атака, выход из атаки,
выход в район аэродрома, заход на посадку, посадка.
В послевоенный период для истребителей интенсивно развиваются ин-
формационно-прицельные системы и системы вооружения, вначале стрелко-
во-пушечного, а затем и управляемого ракетного. В это время была создана
серия полуавтоматических стрелковых прицелов типа АСП, использующих
гироскопический принцип определения скорости линии визирования, и даль-
номер с базой на цели. Помимо угловой скорости и дальности до цели автома-
тически учитывались скорость и высота полета, углы атаки и скольжения. С
развитием радиоэлектроники они автоматически связывались с радиодально-
мерами. Все это обеспечивало решение задач воздушной стрельбы из пушек в
условиях визуальной видимости [2.3, 2.4].
Разработанные информационно-прицельные системы, основанные на ра-
диолокации и инфракрасной технике, позволяли обнаруживать воздушную
цель, определять государственную принадлежность, рассчитывать ее коорди-
наты и выполнять стрельбу в любых метеоусловиях, днем и ночью на боль-
ших дальностях. Радиолокационные средства непрерывно совершенствова-
лись в направлении повышения дальности, помехозащищенности, точности,
снижения массы и габаритов.
В 40-50-е годы были созданы и приняты на вооружение новые авиацион-
ные пушки калибров 23, 30 и 37 мм, не уступающие по своим характеристи-
кам лучшим зарубежным образцам.
Советские ученые разработали теорию лафета авиационного автоматиче-
ского оружия, теорию авиационных пушек и боеприпасов, методы наземной
отработки оружия на самолетах. Были созданы моделирующие стенды и ус-
тановки, учитывающие полные уравнения динамики полета самолетов. ПТи-
рокие исследования по ближнему воздушному бою позволили расширить зо-
ны возможных атак при стрельбе из пушек. Основные сравнительные харак-
теристики пушечного вооружения приведены в табл. 2.1.1.
Показателем качества этого вида авиационного вооружения являлась ве-
личина т] = (q V Q /2g) (n/60)/Q ,
где q - масса снаряда; Vo - начальная скорость снаряда; п - темп стрельбы;
g - ускорение силы тяжести; Q - масса оружия.
68
Таблица 2.1.1
Характеристики пушечного вооружения
Страна Тип пушки Год приня- тия на воору- жение Ка- либр, мм Масса снаря- да, г На- чаль- ная ско- рость снаря- да, м/с Скоро- стрель- ность, выстр/мии Масса, кг Показа- тель ка- чества, кгм/с/кг
ору- жия се- кунд- ного залпа
СССР Н-37 1947 37 735 690 400 103 4,9 1150
НР-23 1949 23 200 690 850 39 2,84 1760
НР-30 1955 30 410 78 900 66 6,15 2880
США М-39 1952 20 103 100 1500 77 2,58 1700
Велико- британия Аден 1952 30 276 600 1000 90 4,6 940
В 50-60-е годы благодаря достижениям в радиоэлектронике, радиолока-
ции, оптикоэлектронике, элементной базе, теории автоматического управле-
ния на истребителях начинает внедряться управляемое ракетное вооружение
класса "воздух-воздух". Разрабатываются и принимаются на вооружение
управляемые ракеты 1-го и 2-го поколений (табл. 2.1.2).
Таблица 2.1.2
Характеристики ракет класса "воздух-воздух" 1-го и 2-го поколений
Ракета Тип ГСН Начальная масса, кг Масса БЧ. кг Тип БЧ Макси- мальная дальность пуска, км Высот- ность по це- ли, км Превы- шение цели при пус- ке. км Ракурс атаки
РС-2УС (Р-55) РК (ТГС) 83 13 ОФ 5...7 20 0,5 зпе
Р-13 (М) РГС, ТГС 85 11 СТ 15 22 5 зпе
Р-8 (М, Ml) РГС, ТГС 275 40 ОФ 14 23 5 зле
Р-98 (М) РГС, ТГС 300 40 ОФ 20(25) 23...24 5...6 ппс, зле
Р-23 (Р-24) РГС, ТГС 225(224) 34 СТ 25(50) 22...24 4...8 ппс, зле
Р-4 (М) РГС,ТГС 480...500 53,5 ОФ 25 21 7...8 ппс, зле
Р-40(Д) РГС, ТГС 350 40 ОФ 35...60 27...30 7...10 ппс, зле
Р-60 (М) ТГС 44(43,5) 3(3,5) ст 10 20 1...3 зле, ппс
В таблице введены обозначения: БЧ - боевая часть; РК - радиокоррекция;
РГС - полуактивная радиолокационная головка самонаведения; ТГС - тепло-
вая головка самонаведения; ОФ - осколочно-фугасная БЧ; СТ - стержневая БЧ.
В середине 50-х годов на вооружение принимается первая управляемая
ракета РС-1-У (РС-2-У). Метод наведения ракеты - трехточка (по радиолучу).
Ракета обеспечивала поражение целей в любых метеоусловиях при атаке цели
со стороны задней полусферы под ракурсами % ч- 2/4 до высот 20 км. В по-
следующем на базе ракеты РС-2-УС был разработан и принят на вооружение
вариант ракеты с тепловой ГСН (Р-55).
69
В конце 50 - начале 60-х годов разрабатываются и принимаются на воо-
ружение несколько самонаводящихся ракет малой дальности типа Р-13 и Р-8,
которые претерпели несколько этапов модернизации с целью повышения их
боевых возможностей. Ракеты комплектовались полуактивной радиолокаци-
онной и тепловой головками самонаведения. Благодаря реализации в этих ра-
кетах самонаведения по методу пропорциональной навигации и двухтипных
ГСН расширились возможности по поражению высотных и маневрирующих
целей, при стрельбе под ракурсами и в условиях радиоэлектронного противо-
действия.
В середине 60-х годов разрабатываются и принимаются на вооружение
ракеты класса "воздух-воздух" 2-го поколения. Это всеракурсные ракеты
средней дальности Р-98, Р-4, Р-40 и их модификации с возможностью пора-
жения целей на высотах до 27...30 км. Ракеты также комплектовались полу-
активной радиолокационной и тепловой головками самонаведения и имели
повышенные характеристики при работе в условиях помех. Возможности ра-
кет по поражению маловысотных целей (Нц < 500 м) были ограничены и оп-
ределялись условиями визуальной видимости.
В 60-70-е годы с принятием на вооружение ракет Р-23, Р-24 и Р-40Д (мо-
дернизация ракеты Р-40) расширились возможности по поражению маловы-
сотных целей в любых метеоусловиях. Однако они ограничивались в основ-
ном задней полусферой атаки.
Опыт боевых действий во Вьетнаме и на Ближнем Востоке поставил в
повестку дня вопрос о необходимости уточнения взглядов на дальнейшее раз-
витие ракетного вооружения класса "воздух-воздух".
В 70-х годах развивается 3-е поколение управляемых ракет, оптимизиро-
ванное для ведения дальних и ближних воздушных боев. Более четко опреде-
лился типаж управляемых ракет, включающих ракеты малой, средней и
большой дальности пуска.
2.1.2. Проблемы расширения боевых характеристик
истребителей, повышения эффективности вооружения
и их решение в работах ГосНИИАС*
Рассматривается общая часть всеобъемлющей проблемы повышения бое-
вой эффективности истребителей и то, как она решалась в работах НИИ-2
(ГосНИИАС).
Вопрос об обоснованном выборе обликовых параметров и структур объ-
ектов становился в послевоенные годы особенно актуальным в связи с про-
грессом техники, когда область реализуемых проектных решений в простран-
стве параметров и характеристик оружия начала бурно расширяться. Потре-
бовалось введение новой численной меры - показателей боевой эффектив-
ности оружия (включая в это понятие и боевой самолет). Очевидно, что эти
показатели тесно связаны с видом боевой операции, проводимой самолетом.
* При составлении настоящего подраздела использованы материалы работы [2.4].
70
В начальный период после войны основным оружием истребительной авиа-
ции являлись пушки, и любая боевая операция включала в себя воздушную
стрельбу. Задачи стрельбы и поражения целей содержали массу случайных
факторов, поэтому в качестве показателей эффективности операции рассмат-
ривались вероятностные характеристики, такие, как вероятность поражения
цели W, математическое ожидание ущерба, причиненного цели, и пр.
Математическая сторона определения этих характеристик в задачах
стрельбы и поражения привлекла внимание математиков, в частности акаде-
мика А. Н. Колмогорова. Большая методическая работа велась на факультете
авиационного вооружения ВВИА им. Н. Е. Жуковского. В этот период с
НИИ-2 МАП активно сотрудничали профессор В. С. Пугачев (впоследствии
академик АН СССР), профессор Е. С. Вентцель - автор многих монографий
по исследованию операций и теории вероятностей. Разработанные ею табли-
цы вероятностей широко использовались в текущей работе. Входами в табли-
цу служили параметры:
п - общее число выстрелов в группе (например, в очереди);
< в - среднее необходимое число попаданий для поражения цели;
р - вероятность попадания в цель при одном выстреле;
ц - мера зависимости между выстрелами в группе.
Для получения параметров р и ц были применены только численные и
весьма сложные методы анализа; оценка со требовала проведения эксперимен-
та по отстрелу целей и их элементов.
Исследования по методическим вопросам определения показателей бое-
вой эффективности при стрельбе и их приложения к выбору оружия и по мно-
гим другим новым для авиационной промышленности проблемам были раз-
вернуты с первых лет существования НИИ-2.
Аналитические оценки показателей W боевой эффективности составляли
только малую часть общей задачи повышения боевых возможностей самолетов
в новых условиях полета. Эффективность зависела от многих факторов, и ее
анализ требовал больших массивов исходной информации, которой в нужном
виде в то время не было. Получение достоверных данных с одновременным
улучшением ряда характеристик выливалось в большую комплексную пробле-
му. Основными ее составляющими для боевых самолетов 50-х годов являлись:
• боевые траектории: перехват, воздушный бой;
• действие боеприпасов по целям: боевая живучесть целей, эффективность
боеприпасов;
• точность стрельбы: баллистика снарядов, рассеивание снарядов, прицелы.
Очевидно, что боевые траектории создают возможность для успешного
применения оружия, точность и режим стрельбы определяющим образом
влияют на W через параметры р и ц, действие боеприпасов по целям получает
оценку в показателе W через обобщенный параметр (о.
Проведенные исследования показали, что решающее влияние на даль-
ность и эффективность воздушной стрельбы оказывает не увеличение калибра
оружия и начальной скорости снаряда (как это было в наземной артиллерии),
а точность прицеливания (при подходящем техническом рассеивании снаря-
дов и знании их баллистики).
71
Особенно сложной была проблема расчета и построения угла упреждения
при стрельбе по подвижной маневрирующей цели. Стало ясно, что поправку
на упреждение нужно вводить не глазомерно, с помощью элементарных при-
цельных устройств, а автоматически, на основе измерения параметров движе-
ния истребителя и цели.
Разработка теории прицела, основанного на использовании свободного
гироскопа с электромеханической коррекцией угловой скорости прецессии,
была проведена В. Е. Рудневым и И. А. Богуславским. Исследовалась также
динамика наводки перекрестия прицела на подвижную цель, демпфирования
линии визирования, сделано несколько изобретений (в том числе новая опти-
ческая схема, не имевшая систематических ошибок, метод увеличения диапа-
зонов углов упреждения и др.). Для повышения эффективности воздушной
стрельбы потребовалась также разработка математических зависимостей,
описывающих решение задач стрельбы применительно к возможностям су-
ществующих датчиков информации и структурных схем прицелов; эти зави-
симости получили название "рабочих формул" прицелов. В 1951 г.
И. Л. Фельдштерном были разработаны и внедрены в тесном сотрудничестве
с КБ заводов "Геофизика" и "Арсенал" рабочие формулы для стрельбы не-
управляемыми реактивными снарядами (НРС).
В промышленности продолжались работы по усовершенствованию при-
целов серии АСП при учете все большего числа параметров, от которых зави-
сит точность решения задачи стрельбы (на большую дальность) как при не-
подвижном, так и при подвижном закреплении оружия на самолете. В 50-е
годы НИИ-2 становится ведущей организацией по составлению рабочих фор-
мул для всех прицелов, устанавливаемых на самолет с любым составом воо-
ружения, и новых систем датчиков информации, в том числе радиолокацион-
ных систем углового сопровождения цели. Можно констатировать, что воз-
никло и начало развиваться новое прикладное научное направление -
разработка рабочих формул воздушной стрельбы и их реализация в прицель-
ных системах самолетов. В дальнейшем эти исследования вылились в одно из
важнейших направлений составления бортовых алгоритмов стрельбы и пуска
как неуправляемых снарядов, так и управляемых ракет.
Проблема повышения боевой эффективности самолетов в условиях роста
скорости и высоты полета связана с изучением воздушного боя и перехвата
как важнейших операций, из которых можно было извлечь дополнительные, а
возможно, основополагающие требования к истребителям. Задача исследова-
ния движения самолета в воздушном бою существенно сложнее обычных тра-
екторных задач динамики полета в силу следующих особенностей:
• анализу должно подлежать относительное движение по отношению к ма-
неврирующей цели; фазовые траектории в этом движении весьма слож-
ные, как и законы управления этим движением;
• граничные условия на конце траектории должны отвечать условиям при-
менения оружия, что представляет сложную задачу (особенно в том слу-
чае, когда цель препятствует выполнению этих условий);
• движение стеснено дополнительными ограничениями, связанными с тре-
бованием непрерывного получения информации о цели и безопасности от
ее огня.
72
В этих условиях выработать правильную, с учетом действий противника,
алгоритмическую основу движения, да еще при ограниченных вычислитель-
ных средствах, было весьма сложно. Поэтому бой в целом как двусторонняя
операция еще не исследовался, а изучались его элементы - обнаружение цели,
сближение, атака, стрельба и выход из атаки. Предварительные исследования
проводились на кинематическом уровне, что позволяло получать решения в
замкнутом виде, исследовать основные их закономерности и решать оптими-
зационные задачи с учетом ограничений на отдельные параметры и характе-
ристики (скорость и высота полета, нормальная перегрузка и ее производная
и др.). Основные усилия были сосредоточены на разработке и изучении мето-
дов сближения и атаки цели, летящей как прямолинейно, так и произвольно
маневрирующей либо совершающей вираж в случайный для перехватчика
момент времени. Был детально обследован известный в общем метод прямого
наведения, изучен и продвинут новый метод полета в "мгновенную" точку
встречи с целью, метод повторения траектории цели, метод сближения, осно-
ванный на соединении простых по форме отрезков траектории (например,
"прямая с разворотом") и др.
В практику проектирования вошло понятие "зона возможных атак" (ЗВА) и
разработаны методы ее расчета. При исследовании этапов атаки и стрельбы
учитывалась связь ЗВА с типом и особенностями прицела, методами решения
задачи прицеливания. Натурным летным экспериментом была подтверждена
допустимость использования простых кинематических методов при исследова-
нии сближения и атаки, в частности, по установлению границ ЗВА при различ-
ных скоростях и высотах полета. Дальнейшие исследования показали, что
большинство методов сближения с ростом скорости полета приводят к резкому
уменьшению размеров ЗВА при неподвижном закреплении оружия на истреби-
теле (например, при сверхзвуковой скорости полета цели ЗВА вырождалась в
узкий конус за хвостом цели с углом при вершине в несколько градусов). Дос-
тигнутое увеличение дальности стрельбы с прицелами-автоматами улучшало
возможности атакующего истребителя, как и метод заградительной стрельбы,
не требующий синхронного сопровождения цели линией визирования (аппа-
ратно он был воплощен в прицельной системе "Сокол" Г. М. Кунявским). Но
это все не снимало проблемы уменьшения ЗВА с ростом скорости полета.
Кардинальное решение проблемы (в условиях пушечного вооружения),
очевидно, состояло в таком размещении подвижной пушечной установки
(ППУ) на одноместном истребителе, чтобы ее можно было прицельно на-
правлять в сторону цели и этим дополнять маневр самолета. Задача разбива-
лась на две части: эргономическую проблему одновременного пилотирования
летчиком самолеза и управления наведением оружия и конструкторскую за-
дачу размещения на небольшом самолете подвижной прицельной станции и
ППУ с вращением вокруг двух осей. Была предложена идея и разработана
ручка управления самолетом с шарнирно закрепленной в верхней части руко-
яткой. При этом поступательными перемещениями кисти руки летчик, как
обычно, управлял самолетом, а вращением кисти через дистанционную сис-
тему направлял прицел (а с ним и оружие) на цель.
73
Результаты работ по использованию подвижной пушечной установки на
истребителе можно обнаружить в проекте системы "Ураган-5" (1959 г.) и в
проектах ряда современных истребителей. Но "в металле" ППУ для стрельбы
по воздушным целям была реализована лишь на экспериментальном истреби-
теле МиГ-17СН. Однако летные испытания самолета в учебных воздушных
боях с обычными истребителями не обнаружили его решающих преимуществ.
Причины этого состояли в основном в эргономических ошибках, допущенных
при разработке ППУ.
Эпопея с подвижной пушечной установкой поучительна с точки зрения
наблюдения за законами развития техники. Из пушечных установок было
выжато все, что можно, но все равно это было "старое" оружие, а "новое" ста-
ло уже формироваться в виде управляемых ракет (УР) класса "воздух-воздух".
Ракеты чуть было не вытеснили пушечное вооружение, но после ряда нега-
тивных моментов, возникших в ходе реальных боевых действий, пушки вер-
нулись на истребители. Однако конструкторы самолетов не стремятся тратить
боевую нагрузку на слишком сложные в компоновке и тяжелые пушечные ус-
тановки как оружие с ограниченными возможностями.
Летные эксперименты по воздушному бою с подвижными пушками и
"отвязанной" от оси самолета линией визирования, а также расчетные методы
определения в этих условиях ЗВА истребителей оказались полезными при
разработке ракет класса "воздух-воздух". Но первые образцы управляемых
ракет, расширяя ЗВА по углам и по дальности, оставались "привязанными" к
атаке из задней полусферы цели. Область атак из передней полусферы оста-
валась неисследованной и недоступной.
Дальность эффективной воздушной стрельбы при лобовой атаке резко воз-
растала, но возможность ее проведения определялась уже дальностью безопас-
ного от столкновения с целью выхода из атаки. С переходом к реактивной
авиации возможность лобовых атак аппаратно исключалась рядом исследова-
телей из-за роста скорости сближения. Однако лобовая атака имела большие
тактические преимущества по рубежам перехвата, внезапности, скоротечности.
В. Е. Рудневым была предложена тактика встречной атаки истребителя по ме-
тоду прямого наведения с переходом на прямолинейный полет с выходом под
цель в непосредственной близости от нее. И. А. Богуславский разработал об-
щую теорию перехвата и прицеливания на встречно-пересекающихся курсах и,
в частности, метод наведения в фактическую точку встречи.
Таким образом, работы рассмотренного цикла позволили провести в
НИИ-2 систематическое изучение вопросов воздушного боя, методов сбли-
жения с подвижной целью и атаки истребителя. Разработаны аналитические
методы исследования движения самолета в пространстве фазовых координат
с учетом связи с целью и введен ряд новых понятий и определений, характе-
ризующих боевые возможности истребителя; исследованы технические и так-
тические возможности расширения ЗВА истребителя, суженных ростом ско-
рости и высоты полета целей; предложен и разработан метод исследования
воздушного боя с помощью стендов полунатурного моделирования.
Линия перехода от отдельных задач прицеливания и построения УР клас-
са "воздух-воздух" к совокупности проблем воздушного боя и перехвата стала
74
приобретать практические очертания с началом разработки авиационных сис-
тем ПВО "Ураган-1" и "Ураган-5". Эти системы разрабатывались ОКБ
им. А. И. Микояна как авиационные комплексы объектовой ПВО особо важ-
ных промышленных районов.
Система "Ураган-1" решала достаточно узкую задачу автоматизации про-
цесса атаки перехватываемой цели после ее захвата БРЛС. Она включала в
свой состав истребитель И-75, его бортовое оборудование (БРЛС "Алмаз",
авиационный стрелковый прицел, счетно-решающий прибор, автопилот) и во-
оружение (пушки, неуправляемые реактивные снаряды, ракету класса "воз-
дух-воздух" К-5, управляемую по лучу БРЛС). Как ее продолжение в 1954 г. в
ОКБ А. И. Микояна начала создаваться система "Ураган-5", которая решала
задачу построения единой замкнутой системы перехвата воздушных целей,
включающей наземные и бортовые средства информации и управления с мак-
симальной автоматизацией процесса боевого полета перехватчика после его
взлета до выхода из атаки и возвращения на аэродром вылета. В наземную
часть системы "Ураган-5" входили несколько обзорно-следящих РЛС, канал
активного запроса-ответа для определения координат наводимого перехват-
чика, цифровая управляющая машина наведения и пункт наведения. Все ме-
тодическое, экспериментальное и научно-техническое сопровождение систем
"Ураган" велось в НИИ-2 большим коллективом специалистов под руково-
дством Е. И. Чистовского. Разработка системы "Ураган-5" была приостанов-
лена в 1962 г. на начальном этапе летных испытаний в связи с ее сложностью
и накопившимся запаздыванием процесса создания. Тем не менее работы по
этим системам оставили заметный след и послужили заделом для новых раз-
работок и перспективных исследований.
В этой связи можно отметить создание в институте базы полунатурного
моделирования (ПНМ), серьезное начало которого было положено работами
по системе "Ураган-5" - первой по-настоящему сложной системы, разработка
которой без ПНМ была бы невозможна. В состав комплекса ПНМ входили:
опытные образцы бортовой аппаратуры перехватчика, участвовавшие в реше-
нии боевых задач (БРЛС, счетно-решающий прибор, автопилот); макет каби-
ны летчика с индикацией и органами управления перехватчиком и режимами
работы бортового оборудования; вынесенный относительно стенда рупорный
имитатор радиолокационных сигналов цели, закрепленный на подвижной ка-
ретке с двумя степенями свободы перемещения; вычислительная система
комплекса ПНМ на базе аналоговых вычислительных машин "Электрон" для
решения дифференциальных уравнений движения самолета, кинематических
уравнений связи с целью и выработки сигналов управления стендом, радиоло-
кационным имитатором и режимами работы бортовой аппаратуры перехват-
чика.
Научные результаты и технические решения, полученные при создании и
отработке системы "Ураган-5", легли в основу последующих авиационных
комплексов перехвата, в том числе:
• необходимость высокой степени автоматизации процессов управления и
наведения при перехвате;
75
• требование наличия единой территориальной системы информационного
обеспечения (наземной АСУ);
• обязательность отработки на комплексе ПНМ бортовых систем перехват-
чика при боевом применении.
Значительный вклад в методологию создания и отработки полунатурным
моделированием сложных авиационных систем и комплексов перехвата вне-
сен работами П. В. Познякова.
Вся история боевой авиации, длительный опыт отечественных и зару-
бежных разработок показывают, что ведущую роль в прогрессе новой авиа-
ционной техники играют качество и эффективность бортовых радиоэлектрон-
ных комплексов. Этот же опыт свидетельствует, что наиболее длительный
технологический цикл проектирования, изготовления, отработки и испытаний
нового авиационного боевого комплекса приходится на бортовые системы, на
бортовое радиолокационное оборудование. Стоимостные затраты на бортовой
комплекс постоянно растут и достигают 50 % стоимости всего авиационного
комплекса.
Обеспечить высокий уровень реальной эффективности авиационного
комплекса, правильно сформулировать и выбрать направления научно-
экспериментальных исследований, внедрить результаты в промышленность,
определить требования к серийному образцу и модификациям, разработать
методику моделирования, сокращенный технологический цикл отработки
бортовых систем - эти задачи были поставлены и решались в ГосНИИАС под
руководством Е. А. Федосова. Именно он организовал создание уникальной
базы по отработ ке систем управления ракет и боевых самолетов, внес осново-
полагающий вклад в теорию систем наведения и в динамическое проектиро-
вание сложных многоуровневых систем управления [2.2, 2.4-2.6].
После совместной работы над системой "Ураган-5" плодотворно продол-
жалось научно-техническое сотрудничество института с ОКБ им. А. И. Ми-
кояна. При создании последних поколений истребителей и перехватчиков
(МиГ-25, МиГ-23, МиГ-31 и их модификаций) ГосНИИАС принимал широ-
кое участие на всех этапах разработки и испытаний, в первую очередь, в фор-
мировании комплекса бортовых радиоэлектронных систем. С середины 70-х
годов установилось также тесное сотрудничество с ОКБ им. П. О. Сухого при
разработке истребителя Су-27.
В целом исследования института сыграли заметную роль в создании 4-го
поколения авиации ПВО (МиГ-31 и Су-27) и в доведении бортовых систем и
вооружения до заданного уровня. Полунатурное моделирование завершалось
выдачей заключений (промежуточных и итоговых), подтверждавших отрабо-
танность комплексов и их готовность к проведению летных испытаний в про-
веренных режимах применения. Сопровождение и анализ Государственных
летных испытаний этих самолетов на базе ГЛИЦ ВВС им. В. П. Чкалова в
г. Ахтубинске также проводились под руководством института. Практически
все технические решения, определяющие облик и функции бортового радио-
электронного оборудования истребителей и их вооружения, были приняты
промышленностью в стенах института или при его существенном влиянии на
их принятие.
76
В заключение необходимо отметить основной универсальный принцип,
используемый в работах ГосНИИАС по направлению истребительной авиа-
ции, - это комплексность во всех аспектах:
• участие во всем цикле создания новых образцов авиационной техники: на
этапе разработки концепций - формирование облика бортового комплек-
са; на этапе НИР - руководство работами совместно с промышленностью;
на этапе проектирования - формирование структур боевых комплексов,
создание бортовых алгоритмов и программ; при наземной отработке-
использование методов полунатурного моделирования; на этапе испыта-
ний - участие в летной отработке, анализ результатов, сопровождение
испытаний моделированием;
• комплексирование бортовых систем и систем вооружения;
• интеграция бортовых систем: управления оружием, навигации, пилотиро-
вания, обороны, управления группой;
• проведение исследований и отработка всех этапов выполнения боевой за-
дачи - формирование полетного задания, полет по маршруту, групповые
и одиночные полуавтономные действия, атака, применение оружия, вы-
ход из атаки, возвращение;
• разработка методов применения авиационного вооружения, логики
управления бортовыми системами, алгоритмов и программ, диспетчеров
обмена информацией в БЦВС;
• поисковые и экспериментальные исследования совместно с промышлен-
ностью по наиболее ответственным бортовым системам авионики: радио-
локации, оптико-локационным системам, навигационным системам, сис-
темам автоматизированного управления самолетом, системам подготовки
и пуска оружия, системам индикации, нашлемным системам, вычисли-
тельным системам (универсальные и специализированные бортовые ма-
шины, вычислительные комплексы, каналы обмена информацией);
• использование исследовательских инструментов- мощной универсаль-
ной вычислительной базы, стендовой базы комплексов полунатурного
моделирования, средств летных испытаний и анализ их результатов;
• применение совокупности научных дисциплин и методов комплексных
исследований бортовых систем и систем вооружения: теория автоматиче-
ского управления в широком смысле (системы автоматические, эргатиче-
ские, иерархические, детерминированные, стохастические, экспертные
и др.); теория и методы оптимизации процессов управления, ситуацион-
ного управления в сложных многосвязных системах; прикладная теория
стрельбы, наведения, самонаведения; методы комплексной обработки
информации; методы программирования и отработки программ для
БЦВС; теория и методы исследования операций, эффективности систем,
принятия решений в условиях неопределенности; методы моделирования
сложных динамических процессов, постановки экспериментов и обработ-
ки результатов; методы создания интеллектуальных систем поддержки
экипажа и обучения летного состава.
77
2.1.3. Исследование боевых возможностей
и боевой эффективности авиационных комплексов перехвата
Общие вопросы анализа
боевых возможностей и эффективности
Боевые возможности характеризуются показателями и свойствами, от
которых зависит способность истребителя и всего авиационного комплекса
выполнять поставленные боевые задачи [1.5, 1.6,2.5, 3.2].
Боевые возможности истребителя-перехватчика можно условно разделить
на группы:
1) Пространственные возможности (области боевого применения), опре-
деляющие области пространства (геометрического и параметров движения
истребителя и цели), в которых могут быть выполнены боевые задачи. К ним
относятся:
• рубежи поражения целей (рубежи перехвата);
• диапазон высот, скоростей и ракурсов перехватываемых целей (зоны воз-
можного перехвата);
• зоны гарантированного перехвата и зоны возможных действий перехват-
чиков;
• ’ зоны возможных атак по начальным дальностям, скоростям, ракурсам и
пеленгам;
• зоны возможных пусков ракет;
• зоны гарантированного и эффективного пуска ракет;
• зоны преимущества в воздушном бою по высотам, скоростям, ракурсам.
2) Временные возможности по выполнению боевых задач количественно
характеризуются следующими показателями:
• время достижения заданной боевой готовности;
• время взлета по команде с КП;
• время выхода на заданную высоту и скорость полета при заданном режи-
ме работы двигателей;
• время барражирования на заданном удалении;
• время достижения заданного рубежа перехвата;
• время реализации отдельных маневров в горизонтальной и вертикальной
плоскостях.
3) Условия выполнения боевых задач:
• ночью и в сложных метеоусловиях;
• фон (земля, облака, море и т. д.);
• применение организованных помех;
• при маневре цели;
• при огневом противодействии.
Часть показателей возможностей выполнения боевой задачи в различных
условиях и ситуациях может носить качественный характер - возможно или
невозможно выполнение всего боевого задания или частной задачи. Другая их
часть (например, влияние помех или маневра цели, а также области и зоны
78
возможных результатов) имеет вероятностный характер и оценивается число-
выми характеристиками случайных величин.
Качество, степень и уровень выполнения истребителем-перехватчиком
функций и задач, для которых он предназначен, характеризуются боевой эф-
фективностью. Вид показателя боевой эффективности определяется характе-
ром боевой задачи или ее части. Наиболее употребляемыми показателями эф-
фективности боевого применения истребителей являются:
при действиях по одиночной воздушной цели:
• вероятность уничтожения цели в заданных условиях;
• отношение или разность вероятностей поражения цели и своего истреби-
теля;
при действиях по групповой воздушной цели:
• вероятность поражения всех целей;
• вероятность сбитая не менее заданного числа целей;
• математическое ожидание числа сбитых целей.
Определение отдельных показателей боевых возможностей может быть
проведено тремя способами: в летных испытаниях, с помощью математиче-
ского и полунатурного моделирования, расчетными методами. Полная оценка
боевых возможностей авиационного комплекса дается при применении всех
способов в тесном их взаимодействии.
Определение показателей боевой эффективности осуществляется только
методами статистического моделирования, основанными на исходных данных
и точностных характеристиках, подтвержденных летным или полунатурным
экспериментом. Этот вывод делается исходя из следующих соображений:
• для получения достаточно достоверных значений эффективности необхо-
димо проведение большого количества реализаций (полетов и пусков);
требования к тому же большого числа режимов и условий боевого при-
менения делают задачу трудноразрешимой по времени и затратам;
• в натурном эксперименте практически невозможно, с одной стороны, во
всех полетах выдерживать постоянство условий задачи (например, высота
и скорость, маневр цели, ее ракурс и т. д.) и, с другой стороны, осуществ-
лять необходимый разброс параметров самолета и его оборудования (по-
грешности измерения, ошибки управления и т. д.);
• условия проверяемой задачи ограничены возможностями целей-мишеней
по высотам, скоростям, уязвимости.
В простейших условиях (например, при перехвате одиночной неманеври-
рующей цели под малыми ракурсами) оценка эффективности производится
расчетно-экспериментальным методом.
Летные испытания применяются для определения качественных воз-
можностей выполнения боевой задачи, а также показателей боеготовности и
временных затрат. Кроме того, летные испытания служат для получения не-
обходимых характеристик математических моделей элементов комплекса
(самолета, бортовой РЛС, ГСН ракет и т. д.), подтверждения их эквивалент-
ности реальным образцам и качественного подтверждения результатов моде-
лирования процессов наведения и атаки на фоне подстилающей поверхности,
при применении маневров цели и организованных помех.
79
С помощью моделирования, кроме оценки эффективности, определяются
области боевого применения, а также исследуется воздействие помех на ком-
плекс и его элементы. Наряду с выполнением этих оценочных задач модели-
рование применяется для определения областей параметров полета целей и
перехватчика при решении задач способом летных испытаний, для отработки
отдельных элементов более сложных моделей и систем, для тренировки лет-
ных экипажей перед полетами.
Расчетный метод является основным при предварительной оценке эф-
фективности и отдельных показателей боеготовности до начала испытаний
комплекса. На основании экспериментально полученных данных расчетным
методом определяются в процессе испытаний оценки отдельных показателей
боевых возможностей для заданных условий. Широко применяются расчеты
при подготовке летных экспериментов и моделирования, а также при обра-
ботке их результатов, в том числе при приведении к стандартным условиям,
при вторичной и статистической обработке.
Адекватность результатов моделирования обеспечивается достоверно-
стью исходных данных, получаемых путем летного эксперимента, и коррект-
ностью используемых математических моделей, описывающих элементы
комплекса (цель, самолет, ракета, БРЛС, САУ и т. д.), проверяемой также в
летных испытаниях. Требования использования результатов натурных экспе-
риментов учитываются при разработке моделей и методик моделирования.
Критерием оценки или показателем боевой эффективности является чис-
ло или совокупность чисел, характеризующих степень приспособленности
истребителя к выполнению той или иной боевой задачи. Оценка боевой эф-
фективности проводится на следующих стадиях разработки авиационного
комплекса: формирование облика, эскизное проектирование, техническое
проектирование, летные испытания и доводка.
Организации промышленности и Министерства обороны при проведении
исследований по оценке эффективности разрабатываемых и модернизирован-
ных авиационных комплексов использовали единую систему показателей и
частные методики оценки. При этом согласовывались расчетные условия бое-
вых действий истребителей, а также технические характеристики самолета,
оборудования, вооружения, наземных систем и исходные данные.
Исследования по оценке боевой эффективности проводятся на иерархи-
ческих уровнях:
1 - большие группы истребителей (полк, эскадрилья);
2 - малые группы истребителей (звено, пара);
3 - одиночные истребители;
4 - подсистемы истребителя и их математическое обеспечение.
Исследования на первом уровне проводятся с целью выработки рацио-
нальных способов боевых действий, проведения сравнительного анализа ис-
требительных комплексов и уточнения требований к характеристикам от-
дельных подсистем истребителя.
На втором уровне осуществляется оценка эффективности истребителя-
перехватчика в групповом воздушном бою с противником. Перед исследова-
телями на этом уровне ставятся задачи отработки требований к техническим
средствам обеспечения групповых действий и оценки эффективности этих
средств, а также выработки тактики воздушных боев.
80
На третьем уровне оценивается боевая эффективность одиночного истре-
бителя; исследования проводятся с целью выбора технических решений при
разработке и модернизации истребителей, определения соответствия их ха-
рактеристик заданным требованиям, сравнительного анализа истребителей и
их подсистем.
На четвертом уровне проводится оценка степени совершенства отдель-
ных подсистем и их математического обеспечения по частным показателям в
типовых условиях боевого применения.
Представляется полезным коротко охарактеризовать некоторые частные
показатели боевых возможностей истребителей-перехватчиков.
Под рубежом перехвата воздушной цели понимается дальность от аэро-
дрома, которую способен достичь самолет при выполнении всех этапов поле-
та с выходом в боевое соприкосновение, атакой, пуском ракет и возвращени-
ем на аэродром вылета в случае полного израсходования топлива на борту с
учетом обязательных затрат и гарантированных запасов. Обычно определяют
два типа максимальных по топливу рубежей перехвата: "форсажный" и "бес-
форсажный". Конкретная величина рубежа R зависит от режима полета цели
(ее высоты и скорости), конечных условий атаки и в большой степени опре-
деляется профилем полета, траекториями наведения и выхода перехватчика в
условия применения оружия.
Более общим показателем является рубежно-временная характеристика
(зависимость tR®) авиационного комплекса, которая характеризует простран-
ственно-временные возможности истребителя. При этом каждому распола-
гаемому рубежу R ставится в соответствие затрачиваемое на его достижение
время tR.
Одной из основных характеристик, определяющих боевые возможности
авиационного комплекса перехвата, является зона возможного перехвата в
плоскости (Нц V„) - область высот и скоростей полета перехватываемых с
заданной вероятностью целей. Эта область зависит от множества характери-
стик комплекса и систем дальнего наведения. На больших высотах наиболее
сильно зона возможного перехвата зависит от качества этапа внешнего наве-
дения истребителя в АСУ, летно-технических характеристик самого пере-
хватчика, располагаемой перегрузки ракет, а также от дальности захвата
БРЛС и поэтому носит вероятностный характер. При заданном типе цели и
заданном уровне вероятности перехвата граница этой зоны рассчитывается с
помощью статистического моделирования процессов наведения истребителя
и ракеты. На средних высотах в ППС граница зоны определяется возможно-
стями цели по скорости полета и характеристиками АКП практически не ог-
раничивается; при перехвате цели с задней полусферы эта зона определяется
в основном предельными возможностями (ограничениями) истребителя по
скорости или числу М полета. На малых высотах полета цели предельные
скорости перехватываемых целей зависят от возможностей БРЛС по подсвету
целей на больших вертикальных пеленгах.
Зона гарантированного перехвата описывается границами, определяе-
мыми относительно исходной точки боевого дежурства истребителя-пере-
хватчика или аэродрома вылета. Дальняя граница этой зоны рассчитывается
как минимум из двух рубежей: максимального рубежа перехвата по запасу то-
плива Rmax т и рубежа перехвата по дальности оповещения RDOii- Ближняя гра-
81
6 - 4094
ница зоны гарантированного перехвата соответствует минимальной дальности
оповещения, при которой возможен перехват цели. Разновидностью этой зоны
является зона возможных действий АКП, зависящая не только от рубежа пе-
рехвата и дальности оповещения, но и от параметров полета цели и бокового
смещения траектории движения цели относительно аэродрома вылета пере-
хватчика. Для расширения зоны возможных действий перехватчика исполь-
зуются режимы и профили, максимизирующие среднюю скорость полета на
перехват.
Зоной возможных атак (ЗВА) в общем случае называется многомерная
область начальных параметров атаки (Уц0, Нц0, Vo, Но, Do, q0, <р0, пуцо и т. д.), из
которых с заданной условной вероятностью возможно осуществление успеш-
ных атак цели. Частным случаем ЗВА является связанная с целью область
пространства в координатах начальной дальности D, ракурса q и превышения
АН, из которой реализуется атака. Под успешной атакой понимается маневр
истребителя после "захвата", в процессе которого он по имеющейся инфор-
мации о параметрах полета цели в соответствии с инструментованным в бор-
товой прицельной системе (СУВ) методом наведения выходит в индицируе-
мую зону разрешенных пусков на время, не менее заданного, производит пуск
ракет, осуществляет облучение цели на этапе полета ракеты с радиолокаци-
онной ГСН и безопасный выход из атаки.
Под зоной возможных пусков (ЗВП) понимается область условий по
взаимному положению истребитель-цель, при пуске из которой ракета может
долететь до цели и уничтожить ее или пролететь с допустимым промахом.
В зависимости от типа применяемых ракет границы ЗВП определяются: мак-
симальной энергобаллистической дальностью пуска Dpmax, минимальной даль-
ностью пуска Dpmin, дальностью захвата цели ГСН, диапазоном углов целеука-
зания ГСН, ошибками прицеливания (наведения) АВ, АГ и т. п. Существует
несколько форм представления зоны возможного пуска. Ее удобно отобра-
жать в полярных координатах относительно цели с учетом максимальных пе-
ленгов и системных ограничений. На практике для представления ЗВП ис-
пользуется ряд систем координат, например (D + <р), (Нц + D), (D -г- q). Ап-
проксимации зон возможного пуска для реализации в бортовых алгоритмах
применения ракет представляют собой зоны разрешенного пуска (ЗРП).
Именно в соответствии с ЗРП индицируются летчику разрешенные дальности
пуска и формируется команда "Пуск разрешен".
Оценка эффективности групповых действий
В качестве наиболее обобщенных показателей эффективности истребите-
лей при групповых действиях рассматриваются:
• математические ожидания потерь целей и истребителей в результате воз-
душного боя;
• математическое ожидание уничтоженных целей, не оказывающих огнево-
го противодействия.
Эти показатели формируются техническими возможностями бортового
радиоэлектронного комплекса, бортовой системы вооружения и управления
истребителей, организацией и реализацией групповых действий командиром
объединенной группы в конкретных тактических ситуациях.
82
Основные показатели эффективности определяются по результатам ис-
пытаний с привлечением результатов натурного эксперимента, полунатурно-
го и математического моделирования.
Расчетные варианты групп истребителей выбираются в соответствии с ус-
тавными положениями по составу авиационных подразделений и частей ПВО
(пара истребителей, звено, эскадрилья, полк), а также с учетом возможностей
истребителей по ведению действий в смешанных и объединенных группах.
Звено считается состоящим из одного ведущего и трех ведомых истребителей;
предусматривается возможность действия звена парами в отдельных тактиче-
ских ситуациях, при этом ведущий звена реализует режим командира объеди-
ненной группы, а ведущие пар— режимы командиров групп. Истребители
действуют автономно или полуавтономно объединенной группой, состоящей
из нескольких групп (до 6) различного тактического назначения (поисковых,
поисково-ударных, ударных, авиационного прикрытия, наращивания усилий и
т. д.), в условиях, когда наземные средства не могут обеспечить поканальное
наведение групп истребителей в режиме централизованного управления.
Оценка качества выполнения и эффективности групповых действий про-
водится с использованием многоуровневой системы математических и полу-
натурных моделей с учетом реализации различных способов действий на
множестве тактических ситуаций. При этом учитываются основные этапы
боевых действий истребителей, их летно-технические данные, характеристи-
ки бортового радиоэлектронного комплекса и вооружения. Адекватность ос-
новных положений методики экспресс-оценки эффективности реальным ус-
ловиям боевых действий истребителей достигается за счет учета основных
факторов действий, в числе которых:
• меры и средства противодействия воздушного противника;
• состав наряда истребителей (групп);
• способы боевых действий и методы управления;
• характер взаимодействия в группе и между группами при решении кон-
кретной тактической задачи.
Система моделей соответствует иерархии уровней исследования общей
боевой эффективности авиационного комплекса. Как правило, основные ре-
зультаты моделирования на моделях более низкого уровня являются исход-
ными данными для моделей более высокого уровня.
Четвертый уровень- это математические и полунатурные модели под-
систем истребителя, бортового радиоэлектронного комплекса и вооружения.
Используются довольно подробные модели подсистем, позволяющие оцени-
вать качество их функционирования и определять вероятность поражения
различных типов целей при помеховом и маневренном противодействии в
различных условиях боевого применения.
С помощью этих моделей определяются тактико-технические возможно-
сти подсистем истребителя и его вооружения:
• вероятности поражения типовых целей в различных условиях боевого
применения;
• зоны разрешенных пусков и области поражения ракет;
• зоны обнаружения и сопровождения целей бортовыми РЛС, в том числе
при их многоканальное™;
83
6-
• качество функционирования подсистем и вооружения в условиях радио-
электронного противодействия, маневра, использования различных высот
и скоростей полета и др. показатели.
Третий уровень - это математические и полунатурные модели одиночно-
го истребителя, в которых оценивается его функционирование совместно с
бортовым радиоэлектронным комплексом и вооружением. На этих моделях
рассчитывается эффективность истребителя и его боевые возможности как
боевого комплекса с учетом загрузки летного экипажа для различных методов
управления и точности внешней радиолокационной информации о целях.
В качестве основных показателей эффективности рассматриваются:
• вероятность поражения цели, не оказывающей огневого противодействия,
или математическое ожидание числа пораженных целей при многока-
нальном обстреле:
М„ = Кн РБС [1 - (1 - Pip)np]
ПР
где К„ - коэффициент надежности истребителя и его систем за время боевого
вылета; РБС - вероятность выхода в боевое соприкосновение (обнаружение
цели); Р1Р - вероятность поражения целей одной ракетой; пр - количество ра-
кет, выпущенных по данной цели; пБК - количество ракет в боекомплекте;
• вероятности поражения истребителя и цели в условиях воздушного боя.
Для дальнего ракетного боя используются области тактических возмож-
ностей в координатах дальностей пуска ракет истребителем и целью. В облас-
ти равных возможностей (ОРВ) вероятности поражения истребителя и цели
соответственно равны:
РГ=1-(1-Р'1р)п^
Р°рв= 1 -(1 -Р”Р)ПР.
В области тактического преимущества (ОТП) истребителя вероятности
поражения цели и истребителя следующие:
Р °тп = (1 — Р Ip ) "^ [1 — (1 — Р J*p )] "р ;
Рцтп = (!-р1Р)ПрЦ [1 -(1 -Pfp)]"'>
где Р jp, Р 1р - вероятности поражения одной ракетой истребителя и цели.
Второй уровень — это математические и полунатурные модели групповых
действий малых групп однотипных истребителей (пара, звено). Оценка эффек-
тивности группы истребителей на этих моделях выполняется с учетом реализа-
ции способов и этапности боевых действий, методов управления, способов ве-
дения группового воздушного боя, в том числе при взаимно-групповой и груп-
повой защите средствами радиоэлектронного противодействия, передаче уп-
равления пущенной ракеты взаимодействующему истребителю, многока-
нального обстрела с учетом загрузки командира группы и летных экипажей.
В качестве основных показателей эффективности рассматриваются мате-
матическое ожидание числа уничтоженных целей, не оказывающих огневого
противодействия, и математическое ожидание потерь противоборствующих
84
сторон в условиях группового воздушного боя. При этом учитывается, что в
групповом бою каждый истребитель решает одну или несколько задач, харак-
терных для боя:
• обеспечение информацией собственных бортовых систем или систем
взаимодействующих истребителей;
• самонаведение автономное или по согласованным траекториям;
• обстрел целей ракетами автономно или во взаимодействии с другими ис-
требителями группы;
• реализация индивидуальной, взаимной или групповой радиоэлектронной
защиты.
В процессе решения перечисленных задач истребитель может пребывать
относительно самолета противника в различных областях тактических воз-
можностей противоборствующих сторон: равных возможностей, тактического
преимущества истребителя, тактического преимущества противника. Каждая
из этих областей характеризуется соотношениями потерь, причем их матема-
тическое ожидание зависит от форм и способов боя, состава и мер противо-
действия противника.
Первый уровень - это модели групповых действий в составе групп истре-
бителей различного тактического назначения. Оценка эффективности на этих
моделях проводится с учетом основных факторов, принятых в моделях третье-
го уровня. Вместе с тем учитываются вопросы управления и взаимодействия в
объединенной группе истребителей. Выходными данными для этих моделей
являются боевые потенциалы групп истребителей различного тактического на-
значения. Показатели эффективности те же, что и для моделей второго уровня.
Сквозное моделирование - метод исследования эффективности
авиационного комплекса перехвата
Рассматриваются вопросы организации моделирования для оценки эф-
фективности авиационного комплекса перехвата. Начиная с разработки ком-
плекса авиационного перехвата МиГ-25П с ракетой Р-40, материалы по оцен-
ке эффективности (вероятности поражения цели) формировались методом так
называемого сквозного моделирования. Сквозное моделирование состоит в
моделировании серии реализаций процессов перехвата от обнаружения цели
наземными средствами или самолетом РЛДН до воздействия на нее пора-
жающих элементов боевого снаряжения ракеты.
Сложность модели элементов комплекса, необходимость адекватного
воспроизведения систем и воздействий, невозможность существенного со-
кращения числа учитываемых факторов без потери достоверности моделиро-
вания заставляют при подобных исследованиях использовать самые подроб-
ные математические модели, а в некоторых случаях прибегать к услугам по-
лунатурного моделирования и даже натурному эксперименту - полету
истребителей на перехват с последующим моделированием пусков ракет. Ис-
ходом каждой такой реализации является поражение или непоражение цели
одной из пущенных по ней ракет.
Число реализаций, необходимое для получения с заданной точностью
оценки эффективности комплекса перехвата - вероятности поражения цели в
одной атаке, - не зависит от числа случайных факторов, учитываемых при
моделировании, и определяется только самой эффективностью.
85
В принципе, современные универсальные вычислительные машины позво-
ляют создать единую модель, описывающую динамику наведения истребителя,
ракеты и цели с учетом случайных параметров и процессов, протекающих в
системах управления и наведения, воспроизводящую работу взрывателя и дей-
ствие поражающих элементов боевой части по конструкции и агрегатам цели.
Применение методов блочного программирования дает возможность разделить
функции при создании моделей отдельных систем комплекса. Однако слож-
ность организации исследования из-за громоздкости такой модели, необходи-
мость анализа полученных результатов специалистами, требующими подроб-
ной информации по соответствующим их специальности вопросам, заставляют
искать пути разделения процесса атаки цели на этапы, с тем чтобы исследова-
ние каждого этапа проводилось на моделях, связанных между собой только на
уровне конечных и начальных условий. Это облегчает труд при создании мо-
делей, позволяет упростить их размещение в универсальных вычислительных
машинах, обеспечивает квалифицированный анализ результатов, создает усло-
вия для проведения сравнительных исследований отдельных этапов при фик-
сированном наборе начальных условий.
Необходимой предпосылкой такого разделения является многоэтапность
процесса атаки цели, когда последующие этапы зависят от предыдущих, но не
оказывают практически на них влияния. Подобных процессов в технике, при-
роде, да и в общественной жизни достаточно много, например прогноз клима-
тических изменений, оценка реальности сроков строительства крупного со-
оружения с учетом случайных факторов (погоды, темпа поставок и т. д.).
Процесс применения управляемого ракетного вооружения обычно пред-
ставляет собой цепь последовательных этапов, на каждом из которых опреде-
ляющей эффективность является только часть систем авиационного комплек-
са. Применительно к перехватчику, оснащенному ракетами класса "воздух-
воздух", можно указать:
• этап дальнего наведения по информации внешних АСУ, заканчивающий-
ся захватом цели бортовой радиолокационной станцией (БРЛС), теплопе-
ленгатором или обнаружением визуально;
• этап самонаведения истребителя, в ходе которого осуществляется пуск
ракет и, если это необходимо, формирование команд радиокоррекции;
• этап наведения ракеты до пролета или прямого попадания;
• этап функционирования неконтактного взрывателя, заключающийся в ана-
лизе сигналов, отраженных от цели , естественных и организованных по-
мех, заканчивающийся формированием команды на подрыв боевой части;
• этап взаимодействия поражающих элементов боевой части с конструкци-
ей цели.
Системы, основные функции которых определяет один из этапов, могут
воздействовать и на другие. Последовательными оказываются только начала
этапов, концы этапов могут существенно перекрываться.
Так, одновременно происходящие процессы наведения самолета-носителя
и ракеты относятся к разным этапам. Влияющие на поведение ракеты колеба-
ния луча БРЛС относительно направления на цель или передаваемые на ракету
команды радиокоррекции, с одной стороны, и процесс наведения собственно
ракеты, с другой, относятся к двум последовательным этапам: наведения ис-
требителя и наведения ракеты. Поведение БРЛС и команды коррекции предпо-
86
лагаются не зависимыми от реакции на них ракеты. В свою очередь поведение
ракеты в значительной мере зависит от указанных отклонений и команд. Сис-
тема управления ракеты не участвует в процессе дальнего наведения, частично
задействована в процессе самонаведения перехватчика (прием целеуказания,
возможно, захват цели головкой самонаведения, выработка команды готовно-
сти к пуску) и "присутствует" в формировании команды на подрыв боевой час-
ти. При исследовании самонаведения истребителя в условиях помех необходи-
мо учитывать поддержку, осуществляемую системой дальнего наведения.
В подобных условиях, когда этапы атаки цели перекрываются, удобно
при исследовании ракеты использовать упрощенную модель истребителя, а
при исследовании самолета-носителя - упрощенную модель ракеты. Схема
исследования процесса атаки цели истребителем показана на рис. 2.1.1. Бла-
годаря последовательности этапов ее удается свести к схеме рис. 2.1.2. Пред-
полагается, что процесс атаки состоит из п этапов, причем каждый i-й этап
заканчивается состоянием, характеризующимся вектором С\, компоненты
которого cjk - в общем случае зависимые случайные величины (координаты,
определяющие взаимное положение истребителя, ракеты и цели; состояние
аппаратуры управления; команды, сформированные в процессе предыдущих
и закончившегося этапов).
Входом i-ro этапа является вектор Ai4 , компоненты которого ам k ха-
рактеризуют начальные условия и параметры системы, зависящие от преды-
дущих этапов (связь векторов А и С поясняется далее). Кроме того, на i-м
этапе на систему воздействует вектор В, случайных возмущений - парамет-
ров и сигналов, определяющих наряду с А! и исход i-ro этапа.
Рис. 2.1.1. Этапы процесса атаки цели авиационным комплексом перехвата
87
Рис. 2.1.2. Условное представление процесса перехвата в виде последовательности
одинаковых по форме процедур
В отличие от вектора Ai_1, состоящего только из случайных величин,
вектор В; может содержать в качестве компонент случайные функции време-
ни, например ошибки измерения, вызванные внутренними шумами головки
самонаведения, либо случайные функции фазовых координат, например
ошибки преломления, вносимые обтекателем, под которым размещена антен-
на головки самонаведения. Вектор В, статистически независим от вектора
Ai4 . Вектор Ао определяет исходную ситуацию процесса атаки, вектор
Сп - конечное состояние, результат многоэтапного процесса.
Любая оценка эффективности многоэтапного процесса оказывается ус-
ловной в том смысле, что она может быть справедливой только по отноше-
нию к определенным статистическим характеристикам вектора Ао и набора
векторов Bj(i = 1, 2,..., п), характеризующих как условия наведения, так и
свойства цели, а также параметры и свойства исследуемого комплекса (есте-
ственно, что структура и номинальные значения параметров комплекса при-
нимаются заданными).
При этом непринципиально, с какого этапа начинается исследование. Это
может быть и режим дежурства на аэродроме или в воздухе, и начало самона-
ведения истребителя, и пуск ракеты. Важно только, чтобы вектор Ао был
описан статистически для всех своих компонент.
Понимая под эффективностью авиационного комплекса вероятность вы-
полнения боевой задачи (например, поражения цели в одной атаке, обеспече-
ние невхода цели в заданную зону и т. п.), будем считать, что вектор Сп все-
гда характеризуется только двумя состояниями: 1 - при выполнении задачи и
О - при ее невыполнении.
Необходимо отметить, что при оценке эффективности атаки цели с при-
менением нескольких ракет успешной считается атака при поражении цели
хотя бы одной из них. Обозначив С„ результат действия одной ракеты (где
X = 1,2, ... - индекс, присваиваемый данной ракете), определяем успех атаки,
как дизъюнкцию [2.7] Cn =(JC„ .
л
Общепринятые в 60-е годы методы оценки эффективности сводились к
перемножению вероятностей успеха на каждом из этапов процесса перехвата.
При этом исследование каждой из вероятностей (вероятностей дальнего наве-
88
дения, самонаведения перехватчика и т. д.) проводилось практически без уче-
та реального распределения входных данных каждого из этапов, зависящего
от предыстории процесса перехвата. Определение вероятности захвата цели
БРЛС, наведения перехватчика и пуска ракеты из зоны осуществлялось без
учета особенностей дальнего наведения. Исследование наведения ракеты ве-
лось при произвольных дальности и начальных ошибках пуска. Вероятность
поражения цели рассчитывалась для не имеющих обоснования условий под-
хода ракеты.
Задача обоснования статистических исходных данных на входе каждого из
этапов (совместных законов распределения входных воздействий этапа А;_,) и
совместной плотности распределения координат на выходе предыдущего этапа
В;, т. е. на выходе нелинейной нестационарной системы высокого порядка, ка-
кой является реальная динамическая система авиационного комплекса, может
быть решена только приближенно. При этом объем вычислений оказывается
тем большим, чем выше число случайных факторов, учет которых представля-
ется необходимым. Это следует из разработанных для приближенного вычис-
ления совместных законов распределения разнообразных интерполяционных
методов [2.7-2.9].
Исключение, как было сказано ранее, составляет последний этап задачи
оценки эффективности комплекса перехвата, на котором всегда используется
достаточно простое предположение о законах распределения компонент век-
тора Ао: поражение или непоражение цели - исходы, смысл которых доста-
точно просто определить.
Последовательным воспроизведением при моделировании этапов каждой
реализации процесса перехвата можно свести его к процессу с двухальтерна-
тивным исходом, причем не все реализации должны доводиться до конца, ес-
ли на одном из промежуточных этапов удается установить, что произошел
отказ и продолжение моделирования не даст положительного исхода.
Исследование эффективности авиационного комплекса перехвата, при
котором каждая реализация в случае отсутствия отказов на промежуточных
этапах доводится до поражения или непоражения цели, получило название
сквозного статистического моделирования [2.10].
Как правило, срыв атаки (невыполнение боевой задачи) может выявиться
на любом этапе. Например, при дальнем наведении истребителя из-за ошибки
внешнего целеуказания цель может оказаться вне зоны поиска БРЛС; из-за
неблагоприятного стечения обстоятельств (поздний захват цели, большие
ошибки наведения, маневр цели) истребитель может не выйти в зону разре-
шенных пусков ракеты; из-за случайных комбинаций аппаратурных ошибок
ракеты и ошибок пуска либо из-за активного маневра цели величина пролета
может исключить возможность срабатывания взрывателя. Часто срыв атаки
связан с такими нарушениями процесса наведения, как срыв слежения голов-
ки из-за выхода на предельный пеленг, разрушение ракеты из-за недопусти-
мого выброса перегрузки и т. д. Во всех реализациях процесса атаки, характе-
ризующихся тем, что, начиная с (i +1)-го этапа процесса, выполнение боевой
задачи становится невозможным, значения вектора С, относятся к множеству
89
отказов ( будем называть его Si). Такие значения вектора С, в дальнейшем
обозначаются Dj: С, —> Dj;Dj eSj.
Значения С,, являющиеся допустимыми для последующего этапа, обо-
значаются, как уже отмечалось, Aj: Q —> А;; А; £ Sp
Вектор Сп принимает только два возможных значения: An £ Sn - выпол-
нение боевой задачи; Dn е Sn - невыполнение боевой задачи (отказ на п-м
п
этапе атаки). Сумма множеств S; всех этапов S = составляет множество
i=l
всех видов отказов в процессе атаки.
Вероятность отказа на i-м этапе при отсутствии отказа до (i - 1 )-го этапа
включительно обозначим 1 - Р„ тогда вероятность выполнения боевой задачи
окажется равной Р = | [ Р, .
i-1
Понятие "отказ" на i-м этапе не всегда удается сформулировать коррект-
но. Границы допустимых значений размыты, и только при очень больших от-
клонениях можно с уверенностью прекратить исследование данной реализа-
ции процесса атаки на i-м этапе. Однозначно вопрос об отказе решается там,
где в силу сложившихся обстоятельств в системе не формируется состояния,
обеспечивающего переход на следующий этап, например не формируется ко-
манда "Пуск разрешен", разрушается ракета и т. д.
Продолжение исследования сомнительных по исходу i-ro этапа реализа-
ций в конце концов позволит решить вопрос об исходе атаки в целом. Однако
на каждом этапе можно указать условие Fj(Cj) > 0, исключающее возмож-
ность поражения цели в данной атаке при любых вероятных значениях набора
Bj( j > i). Как следует из опыта, очень редко встречаются ситуации, когда ве-
роятность Pi успеха на данном этапе постоянна при любых значениях векто-
ра Aj_], вероятность Pj является функцией плотностей распределения векто-
ров А,.) и Bj.
Плотность распределения вектора Ао задается вне рамок исследования
процесса атаки, знание плотности распределения вектора Ап необходимо
только в той мере, в какой она используется для определения вероятности Рп.
Известно [2.11], что при условии независимости опытов статистические
характеристики оценки вероятности u / N (и - число успехов в N опытах) оп-
ределяются только числом опытов и самой вероятностью Р. Для оценки эф-
фективности по частоте успешных атак совершенно несущественно число
случайных величин и процессов, воздействующих на каждом этапе.
Оценка вероятности по частоте появления события подчинена биноми-
альному закону, определяемому только числом опытов и вероятностью Р. Ма-
тематическое ожидание оценки имеет вид М [и / TV] = Р, дисперсии
D = M[(u/n)2]-P2 = Р(1 - P)/N.
90
При сквозном статистическом моделировании свойства двухальтернатив-
ного процесса сохраняются. По существу такое моделирование представляет
собой способ воспроизведения многоэтапного процесса. Исходные данные
для сквозного статистического моделирования проще всего обосновать в слу-
чае, если первый этап воспроизводит обнаружение цели наземными средст-
вами или автономные действия истребителя. При этом законы распределения
компонент вектора Aj не зависят от свойств систем комплекса, а определяют-
ся только тактической обстановкой, в которой он действует.
Трудности обеспечения точности оценок вероятности в процессе стати-
стических испытаний известны. Для того, чтобы по частоте Р с достоверно-
стью (доверительной вероятностью) а = ( 1 - 2Р) утверждать, что истинное
значение вероятности Р отличается от Р не более чем на А, необходимо,
чтобы выполнялось условие А = g2 Р( 1 - P)/N , где g2 - так называемый дове-
рительный уровень двусторонней границы:
2Р 0,2 0,1 0,05
g2 0,7 1,64 2,71
Задавшись точностью оценки А= 0,1 для а. = 0,9 и Р = 0,5, получаем
N 41. Удовлетворившись а = 0,8 при А = 0,1, находим N = 17. При
А = 0,15 и а = 0,9 N = 18. Противоречие между стремлением получить высо-
кую точность оценок и исследовать как можно большую область возможных
применений комплекса в ближайшие годы не будет преодолено, так как в
процессе изучения систем наведения и совершенствования модели одновре-
менно с ростом быстродействия вычислительных машин и повышением эф-
фективности использования машинного времени растет число учитываемых
факторов, а также вариантов начальных условий и "поведений" цели. Особен-
но это проявляется при создании моделей информационных устройств ( голо-
вок самонаведения, бортовых станций), позволяющих вести исследования
разнообразных видов помеховых противодействий, развивающихся не менее
быстро, чем возможности вычислительной техники. В этих условиях необхо-
димо использовать все доступные средства для устранения указанного проти-
воречия.
Одна из возможностей содержится в следствии теоремы Пуассона [2.11 ],
утверждающей, что с увеличением числа независимых опытов в группе усло-
вий средняя частота события сходится к средней по условиям вероятности. Это
свойство позволяет объединять малые группы реализаций, полученные в отно-
сительно близких условиях, например по возможному диапазону высот полета
данного типа цели. При этом за счет увеличения числа групп опытов точность
и достоверность оценки эффективности возрастаю! , хотя эти результаты будут
характеризовать только средние по условиям свойства системы.
При анализе возможностей ракеты или комплекса часто в условиях, близ-
ких к граничным, встречаются случаи, когда первые несколько реализаций
атаки заканчиваются отрицательным исходом. Аналогичная ситуация возни-
кает тогда, когда при исследовании простых условий атаки несколько первых
реализаций оканчиваются поражением цели.
91
Как следует из анализа свойств биномиального закона распределения для
малого числа испытаний [2.12], верхняя доверительная граница Рь при N ис-
пытаниях и К успехах определяется уравнением
к . .
£C'NPb(l-Pb)N“'=1-а,
о
где а доверительная вероятность.
В случае, если в N испытаниях К = 0, уравнение вырождается в
Рь= l-^a.
При этом на основании N последовательных неудачных опытов можно
утверждать с достоверностью а, что истинная вероятность не превосходит Рь.
Так, если удовлетвориться a = 0,9, значения Рь при различных N окажутся
равными
N 1 2 3 4 5 6 7 8
Рь 0,9 0,68 0,54 0,44 0,37 0,32 0,28 0,25
В тех случаях, когда верхняя доверительная граница Рь меньше допусти-
мой эффективности (заданной для данных условий), моделирование может
прекращаться. Так, при заданной эффективности 0,6 достаточно первых трех-
четырех неудач подряд, для того чтобы отказаться от продолжения моделиро-
вания в выбранных условиях. Полученный вывод справедлив и тогда, когда
Рь - верхняя оценка непоражения. Здесь при заданной эффективности 0,4 дос-
таточно трех-четырех успехов подряд для утверждения, что она обеспечена.
При заданной эффективности, равной 0,6, достаточно пяти-шести успехов
подряд.
Анализ распределения вероятностей для U успехов из N опытов дает до-
полнительные возможности. В ряде случаев может оказаться целесообразным
увеличить количество исследуемых ситуаций, ограничив группы реализаций,
например, пятью. В каждой отдельной ситуации при четырех успехах из пяти
опытов это гарантирует, что с достоверностью 0,9 вероятность Р > 0,398, а в
трех из пяти - Р > 0,248. Такая информация подтверждает "работоспособ-
ность" комплекса или ракеты (в том смысле, что с ними противнику необхо-
димо считаться) и позволяет перейти к другим ситуациям, с тем чтобы после
накопления информации оценить среднюю эффективность по набору ситуа-
ций. При меньшем числе успехов в пяти опытах о работоспособности в ука-
занном выше смысле сказать ничего определенного нельзя, так как даже при
отсутствии успеха с достоверностью 0,9 можно утверждать, что его вероят-
ность не выше 0,37, но, естественно, она может оказаться равной и нулю.
В подобных случаях необходимо увеличивать количество опытов.
Итак, принцип сквозного статистического моделирования сложного мно-
гоэтапного процесса с передачей результатов моделирования с этапа на этап
при двухальтернативном исходе позволяет ограничиться числом реализаций,
определяемым ожидаемой вероятностью успеха и необходимой достоверно-
стью ее оценки. Если заданные вероятности успеха больше 0,7, моделирова-
ние может прекращаться при четырех подряд неудачных реализациях. Если
заданные вероятности успеха равны 0,2-0,3 (что означает работоспособность
системы в данных условиях), моделирование может прекращаться при четы-
92
рех подряд успешных реализациях. Обследование эффективности системы в
диапазоне условий применения целесообразно проводить малыми i руппами
реализаций (четыре-пять) с последующим осреднением результатов.
С начала 70-х годов сквозное статистическое моделирование было основ-
ным методом оценки эффективности комплексов перехвата при подготовке ма-
териалов в акты Государственных испытаний. При испытаниях перехватчика
МиГ-25 впервые была организована серия реальных полетов на перехват с
фиксацией условий пуска и последующим моделированием наведения ракет.
Сквозное статистическое моделирование использовалось для оценки эф-
фективности модификаций истребителей МиГ-23, причем при исследовании
истребителя МиГ-23С, вооруженного ракетой Р-24, проводилось полунатур-
ное моделирование самонаведения истребителя, при котором на динамиче-
ском стенде устанавливалась не только БРЛС, но и головка самонаведения
РГС-24, участвующая в воспроизведении подготовки ракеты к пуску и заряд-
ке вычислителя ракеты начальными данными, необходимыми для управления
на инерциальном участке полета до захвата. Полет ракеты моделировался ма-
тематически.
При отработке перехватчика МиГ-31 эффективность ракеты Р-33 иссле-
довалась изолированно от оценки самонаведения истребителя. При модели-
ровании ракеты использовались статистические данные по точности оценива-
ния угловой скорости линии визирования в БРЛС перехватчика, определяю-
щие вероятность захвата цели головкой в конце инерциального участка. По-
видимому, сквозного моделирования здесь не потребовалось, так как при
столь больших дальностях пуска ракеты практически исчезает зависимость
точности наведения от ошибок прицеливания. Тем не менее и здесь принцип
сквозного моделирования был бы необходим при оценке помехозащищенно-
сти комплекса с учетом воздействия помех на режим подсвета цели и работу
хвостового канала головки.
Сквозное статистическое моделирование применялось при оценке эффек-
тивности истребителя Су-27. Здесь при математическом и полунатурном мо-
делировании самонаведения истребителя пришлось накапливать команды ра-
диокоррекции, необходимые для исследования процесса наведения ракеты.
То же самое делалось при оценке ракеты РВВ-АЕ в контуре наведения истре-
бителя МиГ-29С.
2.1.4. Развитие задач и возможностей
истребительной авиации
Послевоенный период развития авиации ПВО условно включает в себя
два этапа создания истребителей (2-го и 3-го поколений): 1946-1960 гг. и
1960-1970 гг.
Период 1946-1960 гг. характеризуется:
• быстрыми темпами развития ракетной авиации;
• освоением сверхзвуковых скоростей полета;
• разработкой и принятием на вооружение всепогодных истребителей-
перехватчиков за счет оснащения их бортовыми РЛС;
93
• разработкой и оснащением истребителей-перехватчиков ракетным управ-
ляемым вооружением класса "воздух-воздух".
В начале этого периода на вооружении авиации ПВО состояли истребите-
ли, которые использовались во фронтовой авиации ВВС (МиГ-9, Як-15,
МиГ-15, МиГ-17, Як-25). Часть истребителей МиГ-17 и Як-25 оснащаются бор-
товыми РЛС, вооружение - пушечное. Боевые возможности этих истребителей
обеспечивали уничтожение дозвуковых воздушных целей в пределах высот
полета истребителей с атакой в заднюю полусферу под ракурсами 0/4 2/4.
В 40-е годы и в начале 50-х годов на вооружении США и других стран
НАТО находились в основном дозвуковые ударные средства: стратегический
бомбардировщик В-47, тактический бомбардировщик "Канберра" В(1) Мк.8,
истребители-бомбардировщики F-84G, F-86H и др. Состоящие на вооружении
авиации ПВО нашей страны истребители и истребители-перехватчики
МиГ-15, МиГ-17, Як-25, МиГ-19 вели успешную борьбу с этими целями.
В 50-60-е годы продолжается совершенствование ударных и обеспечи-
вающих средств воздушного нападения. В 1955 г. на вооружение принимает-
ся стратегический бомбардировщик В-52 (Vmax = 960 км/ч, Нпот =17 км), не-
сколько позднее - стратегические бомбардировщики В-58 (Vmax =2200 км/ч,
Н|1ОТ = 18 км), "Вулкан-2", "Валиант", "Виктор-2" (Vmax= 1000... 1200 км/ч, Нпот
до 17 км), истребители-бомбардировщики F-101A, F-104A, F-105B (Vmax до
2200 км/ч, Нпот = 14... 16 км), палубные бомбардировщики и штурмовики
А-ЗД, А-4М (V,nax до 1100 км/ч, Н|ЮТ до 15 км), а в 1956 г. на вооружение при-
нимается разведывательный самолет U-2 (Vmax= 855 км/ч, Нпот = 20...24,4 км).
Таким образом, в рассматриваемый период значительно возрастает диа-
пазон возможных высот и скоростей полета ударных средств, в том числе на
боевых режимах полета. Продолжают совершенствоваться способы преодо-
ления ПВО путем использования малых высот полета, усиления средств ра-
диоэлектронной борьбы и огневого подавления объектов ПВО. Благодаря
вооружению стратегической авиации управляемыми ракетами класса "воздух-
земля" типа "Хаунд Дог", "Блю Стил" и др., становится реальным нанесение
ударов по военно-промышленным объектам без захода ударных средств в зо-
ну действия средств ПВО. Тактическая авиация также вооружается ракетами
класса "воздух-воздух".
Состоящие на вооружении авиации ПВО истребители-перехватчики уже
не обеспечивали эффективной борьбы с новыми целями. Необходимы были
боевые комплексы с соответствующими ТТХ и системами вооружения. И та-
кие средства разрабатываются параллельно с совершенствованием ударных
средств воздушного нападения. При этом авиация ПВО окончательно перехо-
дит на сверхзвуковые самолеты с ракетным вооружением. Прослеживается
явная тенденция разработки истребителей-перехватчиков ближнего действия
и дальних перехватчиков, способных уничтожать воздушные цели на макси-
мально удаленных рубежах, в идеале до пуска стратегическими бомбарди-
ровщиками управляемых ракет класса "воздух-земля".
В 1953-1960 гг. разрабатываются и принимаются на вооружение специа-
лизированные истребители-перехватчики, решающие только задачи авиации
ПВО (МиГ-19, Су-9, Су-11). Они оснащаются более совершенными бортовы-
94
ми РЛС и ракетным вооружением класса "воздух-воздух". Принятие на воо-
ружение этих истребителей означало переход авиации ПВО на сверхзвуковые
скорости полета. Их боевые возможности обеспечивали перехват сверхзвуко-
вых целей при атаке в заднюю полусферу с увеличением ракурса атаки до 3/« и
превышения цели над истребителем в момент пуска до 3...5 км.
В этот период определяются взгляды на задачи авиации ПВО как средства
зональной обороны при централизованном управлении в наземных системах.
Начали формироваться представления об авиационном ракетном комплек-
се перехвата (АРКП), включающем сверхзвуковой истребитель, бортовую ин-
формационно-прицельную систему, управляемое ракетное вооружение и на-
земную систему управления и обладающем высокой скоростью, скороподъем-
ностью, высотностью, всеракурсностью и всепогодностью действий. Были
обоснованы принципиальные положения о необходимости выдвижения рубе-
жей перехвата и наличии в составе авиации ПВО двух типов истребителей-
перехватчиков. Определяется роль и значение авиационных средств в общей
системе ПВО и формулируется техническая политика развития вооружения.
Период 60-70-х годов характеризуется:
• разработкой и принятием на вооружение новых специализированных ис-
требителей-перехватчиков;
• дальнейшим повышением ЛТХ истребителей, характеристик бортовых
систем и вооружения;
• ростом боевых возможностей и эффективности истребителей-пере-
хватчиков при поражении высотных и маловысотных целей на дальних ру-
бежах, в условиях организованных помех и маневра цели, при огневом
противодействии;
• принятием на вооружение ракет класса "воздух-воздух" 2-го поколения;
• повышением степени автоматизации боевого вылета.
В I960- 1967 гг. на вооружение авиации ПВО принимаются истребители-
перехватчики Су-15, Як-28П, а также дальний перехватчик Ту-128. За счет
оснащения этих истребителей более совершенными бортовыми РЛС с повы-
шенными дальностями действия и ракетным вооружением класса "воздух-
воздух" 2-го поколения стал реальным перехват воздушных целей под любы-
ми ракурсами в передней и задней полусферах.
В 1967-1970 гг. на вооружение авиации ПВО принимаются истребители-
перехватчики МиГ-23М, МиГ-25П, ведется модернизация Су-15, Як-28П,
МиГ-23М, МиГ-25П, Ту-128. В результате возросли боевые возможности
ПВО по перехвату высотных (Нц = 28...30 км) и маловысотных целей
(Нц = 0,04 ... 0,05 км), по обеспечению всеракурсности атаки, а также возмож-
ности ведения дальнего и ближнего боя (МиГ-25ПД, МиГ-23П, Су-15ТМ), в
том числе за счет довооружения ракетой малой дальности Р-60(М).
Интенсивное развитие авиации ПВО в рассматриваемый период было не
самоцелью, а ответом на развитие средств воздушного нападения США
и других стран НАТО и улучшение способов их боевого применения. Уже с
середины 50-х годов ударные силы стратегической, тактической и палубной
авиации начинают широко использовать не только средние и большие, но и
малые и предельно малые высоты полета, радиоэлектронное противодейст-
вие, огневое подавление средств ПВО, сложные боевые порядки и маневр.
95
Шло совершенствование авиационных крылатых ракет класса "воздух-
поверхность". Развитие средств воздушного нападения предъявляло к авиа-
ции ПВО новые требования по возможности уничтожения:
• самолетов-носителей авиационных крылатых ракет на малых и предельно
малых высотах и на дальних подступах к обороняемым объектам;
• авиационных крылатых ракет с малыми эффективными поверхностями
рассеивания;
• самолетов-носителей и авиационных крылатых ракет в сложной помехо-
вой обстановке;
• самолетов тактической и палубной авиации, прикрываемых истребителя-
ми сопровождения.
Поэтому при разработке новой авиационной техники и организации боевых
действий учитывалась необходимость обеспечения:
• действий истребителей-перехватчиков на внешних направлениях путем
наращивания и реализации максимальной дальности полета;
• возможности ведения групповых полуавтономных и автономных действий;
• поражения воздушных целей в широком диапазоне высот и скоростей по-
лета, эффективных отражающих поверхностей и характеристик радио-
электронного противодействия;
• уничтожения помехопостановщиков, высотных разведчиков, групповых и
неразрешенных целей;
_• ведения воздушного боя.
Отдельно ставилась задача разработки дальнего перехватчика для созда-
ния глубокоэшелонированной обороны и уничтожения самолетов-носителей
до пуска крылатых ракет на дальних рубежах. Организация противосамолет-
ной обороны на северном и северо-западном направлениях на базе дальних
перехватчиков диктовалась следующими соображениями:
• для основных сил стратегической авиации США кратчайшим расстояни-
ем до административных и промышленных центров СССР были эти на-
правления;
• имелись значительные трудности экономического и организационного
характера по созданию высокоэффективной группировки ПВО этих рай-
онов на базе ЗРК и ближних истребителей-перехватчиков;
• эффективность ПВО на базе дальних перехватчиков выше, чем на базе
ближних истребителей-перехватчиков.
Перед дальними перехватчиками в качестве основной ставилась задача по
уничтожению самолетов-носителей до пуска ими крылатых ракет путем реа-
лизации групповых полуавтономных и автономных действий по информации
оповещения, получаемой от средств дальнего обнаружения. Основным спосо-
бом боевого применения считались действия дальних перехватчиков из поло-
жения "дежурство на аэродроме или в воздухе" по информации от наземных
РЛС, АК РЛДН, самих дальних перехватчиков или при комплексном исполь-
зовании этой информации в зависимости от складывающейся обстановки.
Таким образом, в этот период военно-политическая обстановка поставила
в повестку дня необходимость оснащения авиации ПВО истребителями
ближнего и дальнего действия.
96
С учетом боевых действий во Вьетнаме и на Ближнем Востоке значи-
тельное внимание уделяется вопросам повышения эффективности истребите-
лей в условиях воздушного боя как за счет совершенствования бортовых
информационно-прицельных систем, так и путем довооружения ракетами
ближнего боя (Р-60). Реализуются значительные меры по повышению поме-
хозащищенности систем вооружения, и, в частности, в бортовые РЛС вне-
дряются моноимпульсные методы углового стробирования, повышается энер-
гетический потенциал станций, используется перестройка несущей частоты,
вводятся системные меры защиты от уводящих и пассивных помех, внедря-
ются дополнительные дальномерные каналы и др. Разрабатываются и прини-
маются на вооружение наземные АСУ управления боевыми действиями авиа-
ционных комплексов перехвата.
Рис. 2.1.6. Рост дальности пуска ракет
класса "воздух-воздух"
Рис. 2.1.5. Рост дальности обнаружения
РЛС
7 - 4094
97
В итоге за послевоенный 25-летний период значительно возросли ЛТХ
истребителей-перехватчиков и характеристики их систем вооружения, опре-
деляющие боевые возможности и эффективность [2.13-2.20]. Так, максималь-
ная скорость истребителей и дальность полета увеличились более чем в три
раза, практический потолок и скороподъемность - в полтора раза, дальность
обнаружения цели бортовыми РЛС и дальности пуска ракет- в 5... 10 раз
(рис. 2.1.3-2.1.6).
Боевые характеристики перехватчиков 3-го поколения
Боевые возможности истребителей-перехватчиков в большой степени оп-
ределяются высотно-скоростными характеристиками и режимами полета. На
рис. 2.1.7 даны эксплуатационные диапазоны высот и скоростей полета пере-
хватчиков 3-го поколения Су-15ТМ, МиГ-23П, МиГ-25ПД, достигаемые на ре-
жиме "полного форсажа" при наличии на каждом самолете по две управляемые
ракеты Р-98М, Р-24, Р-40 соответственно.
Рис. 2.1.7. Диапазоны высот и скоростей полета
самолетов Су-15ТМ, МиГ-23П, МиГ-25ПД
Основными показателями авиационного комплекса перехвата как транс-
портной системы по доставке полезной нагрузки в целевые условия примене-
ния являются рубежные и временные характеристики. Под рубежом перехва-
та R понимается радиус полета самолета при заданном запасе или остатке то-
плива на борту и при выходе перехватчика в определенные конечные условия
для целевых действий (поиска, обнаружения, наведения, атаки и др.). Обычно
рубеж перехвата рассчитывается из условия полного израсходования имею-
щегося топлива (с учетом запасов и обязательных затрат), в связи с чем этот
параметр называется максимальным по топливу рубежом. При его расчете
98
учитывается необходимость обеспечения возвращения перехватчика на аэро-
дром базирования. Другим основным показателем транспортных возможно-
стей является время tR прибытия на максимальный по топливу рубеж. Оно
также определяется запасом топлива GT, режимом работы двигателя, конеч-
ными значениями высоты Нк и числа М полета.
При боевом применении авиации ПВО используется несколько типов ба-
зовых программ полета на перехват воздушных целей. Первый тип - форсаж-
ный применяется при ближнем перехвате, когда располагаемое время на пе-
рехват цели достаточно лишь для набора потребных (конечных) величин вы-
соты и скорости для выполнения атаки. Второй тип программ -
комбинированный используется при дальнем перехвате, когда располагаемое
время позволяет реализовать дозвуковой крейсерский участок полета (поми-
мо сверхзвукового) для увеличения рубежей перехвата. Третий тип - крейсер-
ский используется при перехвате целей, летящих на высотах Нц= 10... 13 км
со скоростями Vu> 1100 км/ч, а также при перехвате низковысотных целей на
больших удалениях (подробнее о типовых программах см. п. 4.2.2).
Рис. 2.1.8. Профиль полета самолета МиГ-25П на перехват воздушной цели
В качестве примера на рис. 2.1.8 показана в координатах "высота Н - путь
L" траектория полета перехватчика МиГ-25П на максимальный рубеж при
выполнении форсажного профиля перехвата цели, летящей со скоростью
Уц= 2500 км/ч на высоте Нц= 27 км. Указаны величины остатка топлива GT и
времени t полета в различных точках профиля. Достижение потолка произво-
дится по программам САУ набора-разгона на режиме "Полный форсаж" (ПФ).
В табл. 2.1.3 приведены рубежные и временные характеристики пере-
хватчиков 3-го поколения для трех профилей полета. В качестве рубежей пе-
рехвата даны располагаемые по топливу максимальные рубежи (в ППС цели).
99
7*
Таблица 2.1.3
Рубежные и временные характеристики перехватчиков 3-го поколения
АКП Тип программы полета Условия перехвата Рубеж пере- хвата, км Время дости- жения рубежа, мин Боевая нагруз- ка
Нц, КМ Уц, км/ч Нк, км Ук, км/ч
Су-15-98М Форсажный 21 2500 17 2000 295 11,4 2хР-98М
Комбинированный 20 2500 15 2000 400 21,4
Крейсерский 12 1000 9,5 900 590 36,4
Ту-128-С-4М Форсажный <21 2000 12,5 1300 490 24,8 2хР-4
Комбинированный <21 2000 12...13 1300 810 52,2
Крейсерский < 16 1000 8...9 930 1070 71,5
МиГ-23П Форсажный 10...18 < 1600 - - 130 8,7 2хР-24
Комбинированный 10...18 < 1600 - - 170 12,3
Крейсерский 1 < 1250 - - 285 29,6
МиГ-25П-40 Форсажный <27 <3000 20 2500 400 13,2 4хР-40
Комбинированный 11,5 1850 8 1500 580 37,4
Крейсерский 0,8 800 0,5 960 600 45,4
Одним из показателей боевых возможностей авиационного комплекса пере-
хвата является зона действия истребителя, которая определяется рубежно-
временными характеристиками (R, tR) самолета, расположением аэродрома ба-
зирования (АБ), боковым пролетом (БП) цели, а также внешним информацион-
ным оповещением (Доп) о цели. Фактически эта зона представляет собой об-
ласть, внутри которой возможен перехват цели, летящей со скоростью Уц при
оповещении Доп. Размеры зон действия существенно зависят от профиля по-
лета, применяемого истребителем при выполнении транспортной операции.
На рис. 2.1.9 приведены такие зоны возможных действий р = р ( Доп, БП, R,
tR, Уц) для перехватчиков 3-го поколения при использовании ими форсажных
профилей полета. Эти зоны рассчитаны для следующих условий: начальная
дальность оповещения Доп = 600 км; скорость цели Уц= 1500 км/ч; высота по-
лета цели Нц= 15 км.
100
Рис. 2.1.9. Зоны возможных действий перехватчиков
при форсажных профилях полета
Еще одним показателем боевых возможностей авиационного комплекса
следует считать зону возможного перехвата, представляемую в виде диапазо-
на высот и скоростей перехватываемых целей. Она строится отдельно для пе-
редней (ППС) и задней (ЗПС) полусфер атаки цели. Зона возможного пере-
хвата обычно приводится наряду с ЛТХ как одна из стержневых характери-
стик конкретного АКП. Эти зоны для комплексов перехвата, состоявших на
вооружении, даны в подразд. 2.2 (см. рис. 2.2.1-2.2.6).
Автоматизированное управление боевыми действиями
Начиная с истребителей-перехватчиков 3-го поколения, авиация ПВО
страны переходит на автоматизированное управление и наведение от назем-
ных АСУ, сохраняя при этом и передачу команд по радио голосом. Борт са-
молета оснащается командной радиолинией управления, с помощью которой
осуществляется взаимодействие АКП с наземной АСУ (см. подразд. 1.2).
Управление боевыми действиями истребителей может осуществляться с
применением АСУ "Воздух-1", "Луч" и неавтоматизированным способом.
Аппаратура управления и наведения систем "Воздух-1" и "Луч" позволяет ав-
томатизировать решение задач по наведению истребителей на воздушного
противника и передаче выработанных команд на борт истребителя.
В состав наземных систем управления входит аппаратура автоматизиро-
ванного решения задачи наведения истребителей. Наведение истребителей
может осуществляться с применением аппаратуры АПН-IM, АНИП-68 и
101
АСУ "Вектор", "Сенеж", "Рубеж". Системы "Вектор", "Сенеж", "Рубеж" при-
меняются в соединениях ПВО, полностью или частично оснащенных средст-
вами автоматизации АСУ "Луч", а АПН-1 М- в системе "Воздух-1". Кроме
того, все перечисленные средства могут применяться и в соединениях ПВО,
не оснащенных средствами АСУ.
АСУ "Вектор" предназначена для автоматизированного управления огнем
зенитной ракетной бригады (полка) смешанного состава и автоматизирован-
ного наведения на воздушные цели истребителей с пункта наведения, совме-
щенного с автоматизированным командным пунктом бригады (полка).
АСУ "Сенеж" представляет собой систему, созданную на базе АСУ "Век-
тор", и является модификацией последней.
АСУ "Рубеж" предназначена для обеспечения автоматизированного
управления боевыми действиями иап.
Автоматизированное наведение перехватчиков 3-го поколения выполня-
лось с применением следующей аппаратуры: Су-15-98 - АПН-1; Су-15-98М,
МиГ-25, МиГ-25ПД- АПН-IM, АНИП-68, "Вектор", "Сенеж"; Ту-128-С-4,
Ту-128-С-4М, МиГ-23П - АПН-IM, АНИП-58, "Вектор", "Сенеж", "Рубеж".
Роль научно-методической базы и прикладных исследований
В послевоенные годы значительное развитие получила научно-методи-
ческая база, используемая на различных этапах создания истребителя-пере-
хватчика: обоснования облика и ТТХ, разработки, испытаний, модернизации
и эксплуатации. Широко применяются модели различных бортовых систем и
вооружения на основе аналоговой, аналого-цифровой и цифровой техники.
Все это значительно сокращает сроки создания авиационной техники и по-
вышает ее качество. Большая заслуга в разработке концепции авиации ПВО,
отработке и испытаниях авиационных систем, бортового оборудования и воо-
ружения методами полунатурного и математического моделирования, в том
числе на динамических стендах, принадлежит ГосНИИАС и другим научным
организациям.
Наиболее полно и результативно участие ГосНИИАС в создании авиаци-
онной техники ПВО проявилось в научно-техническом сопровождении авиа-
ционно-ракетного комплекса перехвата МиГ-25 и истребительного комплекса
МиГ-23.
По системам бортового радиоэлектронного оборудования самолета
МиГ-25 сопровождение заключалось в разработке эскизного проекта, струк-
туры построения системы управления вооружением (СУВ), алгоритмов авто-
матического (при наземном наведении в системе "Воздух-1") и полуавтома-
тического (при самонаведении и выходе из. атаки) управления перехватчиком,
логики и алгоритмов управления режимами работы СУВ и применения
средств вооружения. Указанные задачи решались в аналоговом счетно-
решающем приборе в составе БРЛС "Смерч" и в САУ-155П. Сопровождение
включало также исследования и отработку режимов боевого применения ме-
тодами математического и полунатурного (с опытными образцами аппарату-
ры) моделирования, вопросы построения управляемой ракеты Р-40 и ее сис-
темы управления.
102
При создании комплекса полунатурного моделирования КПМ-1550 ис-
требителя-перехватчика МиГ-25, где впервые использовалась гибридная ана-
лого-цифровая вычислительная система, было найдено много новых техниче-
ских решений по сопряжению аналоговой и цифровой частей комплекса. Раз-
работанная идеология построения математической модели на ЦВМ с учетом
точности и устойчивости решения дифференциальных уравнений легла в ос-
нову всех последующих цифровых моделей при полунатурном моделирова-
нии в реальном времени. При оценке эффективности комплекса МиГ-25 стало
широко применяться статистическое моделирование процессов перехвата.
Исследования по самолету МиГ-23 и его модификациям, проведенные на
основе научно-методической и стендовой базы ГосНИИАС, обеспечили по-
лучение следующих результатов:
• впервые на истребителе МиГ-23 был разработан метод несинхронной
стрельбы из пушечной установки с использованием информации борто-
вой РЛС;
• впервые реализован комбинированный метод самонаведения истребителя
при применении ракет средней дальности Р-23; этот метод, объединяю-
щий методы "прямого сближения" и "кривой атаки", минимизировал рас-
ход перегрузки истребителя и сигнала ошибки наведения при пуске ракет,
расширил зоны возможных атак цели (впоследствии комбинированный
метод самонаведения был реализован на истребителе МиГ-29);
• выведены новые алгоритмы, описывающие зоны разрешенных пусков ра-
кет, обеспечивающие реализацию возможностей ракет при всеракурсном
пуске, а также пуске со значительным превышением и принижением по
высоте полета цели;
• впервые реализована используемая в дальнейшем на всех отечественных
самолетах идеология последовательных пусков двух ракет для поражения
маневрирующих целей;
• разработаны и реализованы в аналоговом вычислителе АВМ-23 два вари-
анта управления полетом самолета на боевых режимах: для истребителей
МиГ-23М, МиГ-23МЛ, МиГ-23МЛМ- полуавтоматическое управление,
формируемое в САУ-23 с использованием информации АВМ-23, при ко-
тором управляющие сигналы отображаются на индикаторе у летчика и
выполняются его воздействием на органы управления; для варианта пере-
хватчика МиГ-23П при наземном наведении в системе "Воздух-Г' - ди-
ректорное управление от САУ-23, что позволило максимизировать рубе-
жи перехвата. Кроме того, на МиГ-23 впервые введено полуавтоматиче-
ское управление силовой установкой через сектор газа.
Последующее участие в создании и отработке авиационных комплексов
МиГ-31, Су-27 и их модификаций таких научных организаций, как ГосНИИАС,
НАГИ, 30 ЦНИИ МО РФ, 2 ЦНИИ МО РФ, МНИИПА, НИИП и ряда других
институтов России показали решающую роль научно-технического и военно-
научного сопровождения при разработке образцов авиационной техники воен-
ного назначения. Главной задачей такого сопровождения является оценка кон-
цептуальных и технических решений, закладываемых в создаваемые образцы
техники, выработка рекомендаций, направленных на обеспечение высокой
боевой эффективности, боевой готовности, безопасности полетов и совершен-
ие
ства образцов, внедрение в них достижений научно-технического прогресса,
развитие способов боевого применения. Научно-техническое и методическое
сопровождение включает: оценку эффективности и экспертизу мероприятий
промышленности по реализации рекомендаций и устранению недостатков, вы-
явленных на этапах создания, испытаний и эксплуатации авиационной техни-
ки; оказание научной помощи исполнителям в решении технических проблем;
оценку боевой эффективности комплексов; синтез бортовых алгоритмов сис-
тем управления вооружением и систем наведения оружия, стендовую отработ-
ку этих систем; участие в испытаниях на боевое применение; оперативно-
тактическая, военно-техническая и эксплуатационная оценка качества реализа-
ции требований технического задания и др.
Научно-методическая база используется на всех этапах жизненного цикла
образца авиационной техники и наиболее широко - на стадиях создания на-
учно-технического задела, формирования концепции и при проведении опыт-
но-конструкторских работ. Создание научно-технического задела осуществ-
ляется с целью получения и накопления знаний в области авиационной науки
и техники, теоретической проработки и экспериментальной проверки новых
идей и технических решений, отработки перспективных технологий. Форми-
рование концепции авиационного комплекса включает обликовые исследова-
ния, разработку аванпроекга и подтверждение технической реализуемости
концепции. На этапе опытно-конструкторских работ при научно-техническом
сопровождении и при участии научных коллективов проводятся: составление
эскизного проекта; разработка технического проекта и изготовление макета;
создание документации и опытного образца; наземная и стендовая отработка;
летно-конструкторские и Государственные (совместные) испытания.
Уникальные научно-производственные возможности российских институ-
тов и конструкторских бюро, высокая квалификация специалистов, накоплен-
ные инженерами и учеными глубокие знания в областях разработки и комплек-
сирования бортового оборудования специального назначения, авиационных
комплексов и систем вооружения нашли применение при реализации программ
создания истребительной авиации 4-го поколения. Примером значительной ро-
ли прикладных научных разработок и методической базы явились работы по
авиационным комплексам МиГ-31 и Су-27. Над созданием этих авиационных
комплексов перехвата, и поныне состоящих на вооружении ВВС России, и их
бортовых систем трудились большие коллективы научных, конструкторских и
производственных организаций страны. В целом ряде институтов и конструк-
торских бюро решались научно-технические проблемы разработки систем, ин-
теграции борта, идеологии боевого применения, отработки и испытаний.
Совместный труд инженеров, конструкторов, ученых, испытателей обес-
печил высочайшие летные, боевые и тактические характеристики комплексов
перехвата 4-го поколения, сохранившие передовой уровень до настоящего
времени.
Опыт разработки авиационных комплексов и бортовых систем различных
поколений показывает, что только при полном использовании результатов на-
учно-технического прогресса, методической базы и научно-технического заде-
ла возможно создание совершенной и высокоэффективной боевой техники.
104
2.2. Истребители и перехватчики,
состоявшие на вооружении войск ПВО страны
в послевоенный период
Авиация ПВО в послевоенный 25-35-летний период прошла значитель-
ный путь создания и развития истребителей 2-го и 3-го поколений: от первых
реактивных истребителей, вооруженных пушками и способных вести боевые
действия днем в простых метеоусловиях, до всевысотных, всепогодных, раке-
тоносных истребителей-перехватчиков с максимальной автоматизацией про-
цесса перехвата, обеспечивающих борьбу практически со всеми воздушными
целями, состоящими на вооружении западных стран в тот период [2.5, 2.13-
2.17]. Трудом тысяч ученых и конструкторов были разработаны современные
боевые самолеты, воплотившие в себе новейшие достижения научно-
технического прогресса. Многие типы отечественных истребителей принима-
ли участие в локальных войнах и конфликтах и показали хорошие боевые ка-
чества. Авиация ПВО совместно с другими родами войск обеспечивала на-
дежную противовоздушную оборону страны.
2.2.1. Истребители ПВО начального этапа
Первенцами советской реактивной авиации в послевоенные годы стали
истребители Як-15 и МиГ-9. Первый полет на обоих самолетах был совершен
24 апреля 1946 г. Оба истребителя выпускались серийно. Истребитель Як-15 с
одним двигателем РД-10 (тяга 900 кгс) при взлетной массе 2635 кг достигал
скорости 800 км/ч и имел дальность полета 720 км. Вооружение включало две
пушки НС-23 калибра 23 мм. Истребитель МиГ-9 с двумя двигателями РД-20
(тягой по 800 кгс каждый) при взлетной массе 5000 кг достигал скорости
911 км/ч и имел дальность полета 800 км. Вооружение включало одну пушку
Н-37 и две пушки НС-23 калибров 37 и 23 мм соответственно.
Истребители МиГ-15 и МиГ-17
В 1948 г. в массовое серийное производство был запущен истребитель
МиГ-15. Истребитель МиГ-15- первый отечественный истребитель со стре-
ловидным крылом (угол стреловидности 35°). Фронтовые истребители МиГ-15,
а также дальнейшие их модификации - МиГ-15бис (начало серийного произ-
водства 1949 г.), МиГ-17 (серия с 1949 г.), МиГ-17Ф (серия с 1951 г.) - дли-
тельное время были на вооружении авиации ПВО. Основное их назначение -
105
перехват воздушных целей днем в простых метеоусловиях. Имелась возмож-
ность подвески двух бомб для действия по наземным целям совместно со
стрелково-пушечным вооружением.
Истребители представляли собой цельнометаллические свободнонесущие
среднепланы со стреловидным крылом и стреловидным оперением, имели
герметичную кабину, катапультирующее кресло и аэродинамические тормоз-
ные щитки. На этих самолетах впервые применена гидравлическая система
уборки и выпуска шасси, а также бустерная система управления элеронами.
Летно-технические характеристики истребителей МиГ-15 и МиГ-17
Экипаж, чел МиГ-15 1 МиГ-15бис 1 МиГ-17 1 МиГ-17Ф 1
Взлетная масса, т 4,8 4,9...5,0 5,2 5,34
Количество и тип двигателей .. 1хТРД РД-45 1хТРД ВК-1 1хТРДВК-1 1хТРДВК-1Ф
Тяга двигателя, кгс 2270 2700 2700 3380
Максимальная скорость полета, км/ч .. 1050 1060 1094 1145
Практический потолок, км 15,2 15,5 15,6 16,6
Скороподъемность у земли, м/с 46 46 47 -
Максимальная эксплуатационная
перегрузка 8 8 8 8
Максимальная дальность полета, км ... 1050 1076 1114 1145
Вооружение истребителей включало три пушки (1хН-37, 2хНР-23) с бое-
комплектом 40 и 80 патронов на каждой соответственно. Стрельба по воз-
душным целям велась с использованием оптического прицела АСП-17. Пу-
шечное вооружение было размешено на опускаемом с помощью встроенной
лебедки лафете, что значительно облегчало эксплуатацию.
В 1948 г. завершилась работа над новым одноместным истребителем под
двигатель ВК-1. При создании нового самолета, получившего название
МиГ-17, конструкторы, оставив в принципе оправдавшую себя схему МиГ-15,
стремились добиться заметного увеличения скорости с сохранением манев-
ренных качеств. Истребитель МиГ-17 (рис. 2.2.1)- дальнейшая модификация
истребителя МиГ-15бис. На МиГ-17 установлено новое крыло с большим уг-
лом стреловидности (45°), что повлекло за собой увеличение площади крыла,
длины самолета, изменение площади хвостового оперения и привело к увели-
чению взлетной массы. Истребитель МиГ-17Ф с форсажным двигателем стал
первым в мире серийным истребителем, превысившим скорость звука в гори-
зонтальном полете. Эти истребители располагали возможностью уничтоже-
ния днем в простых метеоусловиях воздушных целей, летящих с дозвуковой
скоростью полета, при атаке в заднюю полусферу. Высотность уничтожаемых
целей ограничивалась практическим потолком истребителя.
Для повышения боевых возможностей по уничтожению воздушных целей
днем и ночью в простых и сложных метеоусловиях в конце 40 - начале 50-х
годов разрабатываются бортовые РЛС. В 1949 г. на базе серийного самолета
МиГ-15бис создается истребитель-перехватчик с РЛС "Торий", а в 1951 г. на
базе серийного самолета МиГ-17Ф создается вариант истребителя-пере-
хватчика с РЛС "Коршун". Обе модификации были выпущены малой серией.
В 1950 г. на базе серийного истребителя МиГ-15бис разрабатывается ис-
требитель-перехватчик с РЛС "Изумруд". Истребитель был в серийном про-
изводстве, вооружение его включало две пушки НР-23.
106
Рис.2.2.1. Истребитель МиГ-17
В 1952 г. на базе серийного истребителя МиГ-17 была разработана моди-
фикация истребителя-перехватчика МиГ-17ПФ с РЛС "Изумруд", на котором
в дополнение к пушечному вооружению размещались управляемые ракеты
РС-2У. С этого времени управляемое ракетное вооружение утверждается как
боевое оружие истребителей-перехватчиков.
На истребителях, оборудованных РЛС и пушечным вооружением, прице-
ливание при стрельбе по воздушным целям выполнялось с помощью прице-
лов типа АСП.
Благодаря оснащению истребителей бортовыми РЛС стало реальностью
выполнение перехвата воздушных целей днем и ночью в любых метеоуслови-
ях. Кроме того, возросли вероятности вывода истребителя в боевое соприкос-
новение с воздушными целями при наземном наведении. Вместе с тем боевые
возможности этих истребителей ограничивались перехватом дозвуковых воз-
душных целей (V„= 850 ... 950 км/ч) со стороны задней полусферы в преде-
лах практического потолка полета (для истребителей со стрелково-пушечным
вооружением) и небольшим превышением цели до 0,5 км относительно ис-
требителя (для истребителей с ракетным вооружением). Возможности унич-
тожения целей на малых высотах были существенно ограничены, главным
образом, условиями визуальной видимости.
В качестве основного способа боевого применения истребителя использо-
вался перехват воздушного противника из положения "дежурство на аэродро-
ме". Наведение осуществлялось с командного пункта путем передачи по радио
голосом команд (курс, высота, скорость) и информации о воздушном против-
нике. Дублирующим способом являлся самостоятельный выход на цели.
Создание в свое время истребителей МиГ-15, МиГ-17 и их модификаций
означало выход нашей военной авиации на мировой уровень. Опыт боевого
применения этих истребителей в корейской войне и в конфликтах на Ближ-
нем Востоке подтвердил это положение.
Истребитель МиГ-15 с такими же двигателями, как и у американского ис-
требителя F-84 "Сейбр", был значительно легче (4,8 т против 6,22 т), поэтому
имел лучшие тяговооруженность, скороподъемность на высотах более 8 км,
потолок 15 км против 12,5 км. Высокие боевые качества истребителя МиГ-17
107
подтвердились во время военного конфликта на Ближнем Востоке в 1956 г.
Он превосходил французский истребитель "Мистер-IV" по скорости, продол-
жительности полета и вооружению.
Самолеты МиГ-15, Миг-17 и их модификации для своего времени были
высококачественными современными боевыми истребителями. Они выпуска-
лись большой серией, в том числе для поставок во многие страны, и показали
высокую эффективность и надежность при относительно простой эксплуата-
ции в боевых условиях. Эти истребители участвовали во многих послевоен-
ных конфликтах и проявили хорошие боевые качества.
В 1955 г. СССР передал КНР комплект технической и технологической до-
кументации по истребителю МиГ-17, а также значительную часть необходимой
для его сборки оснастки. В 1956-1959 гг. в КНР было построено 767 истреби-
телей J-5 (F-5), характеристики которого практически идентичны МиГ-17.
В 1961 г. на базе истребителя-перехватчика МиГ-17ПФ начались работы по
созданию китайского варианта J-5A. Эти истребители использовались в воз-
душных боях с самолетами ВВС Тайваня. Только в 1958 г. были уничтожены
два самолета F-84G, шесть самолетов F-86 с пулеметным вооружением и один
F-86 с управляемыми ракетами AIM-9 "Сайдуиндер". В 1957 г. был уничтожен
американский разведывательный самолет RB-57, в 1967 г, - истребитель F-4
"Фантом".
Истребители J-5(A) поставлялись во Вьетнам. За первые четыре месяца
1966 г. в воздушных боях было сбито 11 американских самолетов при потерях
девяти J-5.
Истребитель-перехватчик Як-25
Для повышения боевых возможностей авиации ПВО по уничтожению воз-
душных целей в любых погодных условиях, днем и ночью, особенно на малых
высотах и на вынесенных от обороняемых объектов рубежах в начале 50-х го-
дов в ОКБ А.С. Яковлева с участием ряда других КБ разрабатывается всепо-
годный барражирующий двухместный истребитель-перехватчик Як-25. Он ос-
нащается двумя ТРД РД-9 с тягой по 2600 кгс каждый. При взлетной массе
9,22 т Як-25 развивал максимальную скорость 1090 км/ч и имел дальность по-
лета 3000 км. На нем устанавливались бортовая РЛС РП-1 с дальностью обна-
ружения цели с суЭОи— Ю м2 порядка 10 км, а также две пушки Н-37Д калибра 37
мм. Серийное производство началось с 1952 г. Расположение двигателей в мо-
тогондолах под крылом позволило освободить в фюзеляже место для размеще-
ния РЛС, увеличить запас топлива и разместить второго члена экипажа. Нали-
чие второго члена экипажа значительно снижало загрузку летчика при работе с
РЛС во время боевого вылета, особенно при выполнении перехвата на малых
высотах. По сравнению с истребителями МиГ-15 и МиГ-17 истребитель-
перехватчик Як-25 располагал лучшими возможностями по уничтожению воз-
душных целей на малых высотах. Кроме того, он обладал рекордной для реак-
тивных истребителей того времени продолжительностью и дальностью полета,
мог длительное время барражировать в зоне на угрожаемом направлении в лю-
бых погодных условиях, днем и ночью, что в условиях ограниченного опове-
щения значительно повышало рубежи перехвата. Вместе с тем его боевые воз-
можности ограничивались уничтожением целей, летящих с дозвуковой скоро-
108
стью, при атаке со стороны задней полусферы под ракурсом 0/4-г 1/4 в пределах
высот полета, определяемых практическим потолком.
В качестве способа боевого применения использовался не только пере-
хват из положения "дежурство на аэродроме", но и перехват из зон барражи-
рования. Самолет имел относительно малую взлетную массу, был прост в
управлении и эксплуатации. Истребитель-перехватчик Як-25 стал прообразом
дальнего перехватчика.
Истребитель МиГ-19
Истребители МиГ-15, МиГ-17, Як-25 располагали возможностями уничто-
жения только дозвуковых целей. Принятие на вооружение в 1954 г. истребите-
ля МиГ-19 (рис. 2.2.2) означало переход авиации ПВО на сверхзвуковые скоро-
сти полета. Научно-исследовательский и технологический потенциал страны
позволил создать сверхзвуковой самолет с крылом большой стреловидности,
имеющий хорошее прицельно-навигационное оборудование и вооружение, по-
зволяющее вести боевые действия днем и ночью в любых погодных условиях.
Истребитель МиГ-19 был построен по классической схеме- среднеплан со
стреловидным крылом и оперением; стреловидность по передней кромке крыла
увеличилась до 58°. Для повышения эффективности управления на сверхзвуко-
вых и дозвуковых скоростях был впервые установлен автомат регулирования
управления (автоматическое отклонение стабилизатора в зависимости от ско-
рости и высоты полета). В системе управления применялись бустеры (гидро-
усилители). Для уменьшения длины пробега использовался тормозной пара-
шют. Самолет оснащался трехсекционными тормозными щитками.
Летно-техиические данные истребителя МиГ-19С
Экипаж, чел.............................................. 1
Взлетная масса нормальная/максимальная, т......... 7,5/8,5
Количество и тип двигателей........................ 2хТРД РД-9Б
Тяга двигателя, кгс.................................... 3250
Максимальная скорость полета, км/ч..................... 1454
Практический потолок, км............................... 17,25
Скороподъемность у земли, м/с......................... 120
Максимальная эксплуатационная перегрузка................. 6
Максимальная дальность полета с ПТБ / без ПТБ, км. 1800/1390
Рис.2.2.2. Истребитель МиГ-19
109
Истребитель МиГ-19С состоял на вооружении ВВС и авиации ПВО.
В качестве прицела использовался АСП-19. Вооружение включало три пушки
НР-ЗО калибра 30 мм. Это был истребитель-перехватчик для боевого приме-
нения в условиях визуальной видимости.
В дальнейшем на базе МиГ-19С разрабатываются истребитель-пере-
хватчик МиГ-19П (1955 г.) с бортовой РЛС "Изумруд" (Do6h> 10 км по цели
с Отои Ю м2), вооруженный двумя пушками НР-ЗО и двумя-четырьмя
управляемыми ракетами РС-1У; истребитель-перехватчик МиГ-19ПМ
(1955 г.) с РЛС, четырьмя управляемыми ракетами РС-1У, но без пушечного
вооружения.
Была выполнена также модификация высотного перехватчика МиГ-19СВ
(1955 г.). Боевые возможности истребителей-перехватчиков МиГ-19П(М)
обеспечивали уничтожение воздушных целей, в том числе в условиях отсут-
ствия визуальной видимости, при атаке со стороны задней полусферы под
ракурсами 0АН2/4 на высотах до 17,5... 18 км. Возможности уничтожения ма-
ловысотных целей ограничивались в основном условиями визуальной види-
мости. Принципиальным отличием этого истребителя-перехватчика от преды-
дущих явилась возможность перехвата сверхзвуковых целей (Уц < 1200 км/ч).
В качестве основного способа боевого применения использовался перехват из
положения "дежурство на аэродроме" при поканальном наведении с индика-
тора наземных РЛС и передаче команд наведения по радио голосом.
Истребитель МиГ-19 и его модификации поставлялись в восемь стран
мира. Он серийно производился по лицензии в Чехословакии (S-105) и Китае
J-6 (F-6) с модификациями всепогодных истребителей-перехватчиков. Китай-
ский вариант этого истребителя широко использовался в индо-пакистанской и
ирано-иракской войнах.
Состоящие на вооружении ВВС и ВМС Китая истребители J-6 (F-6) в пе-
риод 1964-1968 гг. сбили более 15 американских разведывательных и удар-
ных самолетов (RF-101, F-104C, А-6) и значительное количество автоматиче-
ских дрейфующих аэростатов.
Истребители-перехватчики Су-9 и Су-11
В конце 50-х годов на вооружение принимаются разработанные специ-
ально для авиации ПВО истребители-перехватчики Су-9 (1958 г.) и Су-11
(1959 г.). Продолжается дальнейшее наращивание боевых возможностей и
эффективности за счет:
• повышения скорости полета самолета и его высотности;
• увеличения рубежей перехвата;
• оснащения более совершенным прицельно-навигационным оборудовани-
ем и управляемым ракетным вооружением.
Су-9 был первым в СССР истребителем-перехватчиком, являвшимся со-
ставной частью единого авиационного комплекса перехвата, включающего
самолет Су-9, бортовую систему управления ЦД-ЗОТ, управляемые ракеты
РС-2-УС, наземную систему управления и наведения "Воздух". На истребите-
ле-перехватчике отсутствует пушечное вооружение. Основное назначение
НО
Су-9 - уничтожение воздушных целей днем и ночью в любых метеоусловиях
с атакой со стороны задней полусферы. С 1956 по 1962 г. на авиазаводе
им. В. П. Чкалова в Новосибирске было выпущено 1000 самолетов Су-9. Од-
новременно ведутся работы по модернизации истребителя-перехватчика в на-
правлении повышения его боевых возможностей и эффективности. Разраба-
тывается истребитель Су-11 с модернизированным двигателем повышенной
мощности, новой бортовой РЛС "Орел" и более совершенными самонаводя-
щимися управляемыми ракетами класса "воздух-воздух" с полуактивной ГСН.
Рис. 2.2.3. Истребитель-перехватчик Су-11
Истребитель-перехватчик Су-11 (рис. 2.2.3) представлял собой средне-
план с треугольным крылом тонкого профиля и стреловидным хвостовым
оперением. Хвостовое оперение состояло из классического вертикального и
управляемого горизонтального оперения. На самолете использовался тор-
мозной парашют и четырехсекционные тормозные щитки. Он оснащался
трехстоечными шасси с одинарными колесами. На самолете применялся ло-
бовой сверхзвуковой воздухозаборник, регулируемый с помощью подвиж-
ного центрального конуса.
Характеристики самолетов Су-9 и Су-11
Су-9
Экипаж, чел............................................... 1
Взлетная масса нормальная/максимальная, т.......... 11,4 / 12,5
Количество двигателей ............................... 1хТРДАЛ7Ф-1
Тяга двигателя, кгс .................................... 9600
Максимальная скорость полета на высоте / у земли, км/ч 2120/ 1150
Практический потолок, км................................ 20
Максимальная эксплуатационная перегрузка........... 4
Дальность полета, км............................... 1800
Бортовая РЛС........................................... ЦД-ЗОТ
Дальность обнаружения цели (<тЭоп - Ю м* 2 * *), км. 20
Управляемое ракетное вооружение (количество, тип) .... 4хРС-2-УС
Максимальная дальность пуска ракет, км............. 5... 7
Число точек подвески...................................... 4
Су-11
1
12,6/13,6
1хТРДАЛ 7Ф-2
10 100
2340/1200
17...18,5
4
1710
"Орел" (РП-6)
30
2хР-8(М, М-1)
12...14
6
111
Боевые возможности этих истребителей по диапазону высот и скоростей
перехватываемых целей приведены на рис. 2.2.4.
С принятием на вооружение истребителей-перехватчиков Су-9 и Су-11
повысились боевые возможности и эффективность авиации ПВО по уничто-
жению скоростных и высотных целей в любых метеоусловиях днем и ночью
на значительных рубежах, в том числе в условиях радиоэлектронного проти-
водействия. Возможности уничтожения целей, летящих на высотах 0,5...1 км
и ниже, были ограничены в основном условиями визуальной видимости.
Основной способ боевого применения этих истребителей-перехват-
чиков - перехват воздушных целей из положения "дежурство на аэродроме"
при наведении с наземных пунктов.
В середине 60-х годов истребитель Су-9 был модернизирован в направле-
нии повышения его помехозащищенности за счет установки смешанного бое-
комплекта ракет (2хРС-2-УС и 2хР-55 с ТГС) и вошел в состав комплекса
Су-9-51. На варианте самолета Су-11 (Т-431) был установлен ряд мировых ре-
кордов, в том числе по высоте (28 852 м) и скорости на базе 500 км (2337 км/ч).
В начале 1962 г. был принят на вооружение комплекс Су-11-8М. Этот
авиационный комплекс перехвата по сравнению с комплексом Су-9-51 имел
ряд преимуществ:
• максимальная высота поражения целей возросла с 20 до 23 км;
• обеспечена атака целей, летящих с превышением относительно перехват-
чика до 5 км;
• на 53 % увеличена дальность обнаружения, на 70... 100 % - дальность за-
хвата и на 50.. .75% - пуска ракет.
Истребители-перехватчики Су-9 и Су-11 оставались самыми скоростны-
ми и высотными самолетами ПВО до 1969 г. - начала производства истреби-
112
теля МиГ-25. На вооружении авиационных частей ПВО эти самолеты находи-
лись до начала 80-х годов.
Истребитель МиГ-21
В 1959 г. в серийное производство для ВВС был запущен истребитель
МиГ-21 (рис. 2.2.5). Он является одним из самых массовых самолетов мира,
который выпускался серийно в течение 28 лет (1959-1986 гг.). Этот самолет
имел 15 основных и 30 опытных модификаций, главные из которых: фронто-
вой, в том числе всепогодный, истребитель, истребитель-перехватчик, развед-
чик. В зависимости от модификаций на истребителе устанавливались двига-
тели Р-11Ф-300 (тяга 5600 кгс), Р-13-300 (6600 кгс), Р-25-300 (7100 кгс).
Одной из основных модификаций явился фронтовой всепогодный истре-
битель МиГ-21бис, выпускавшийся с 1972 г.
Некоторые характеристики истребителя МиГ-21бис
Взлетная масса нормальная/максимальная, т..... 8,7 / 10,4
Количество и тип двигателей
1х Р-25-300
Тяга двигателя, кгс..........................
Максимальная скорость на высоте / у земли, км/ч....
Практический потолок, км.....................
Скороподъемность, м/с........................
Практическая дальность полета без ПТБ
с двумя УР Р-ЗС, км...........................
Максимальная располагаемая перегрузка........
Максимальная масса боевой нагрузки, т .......
Количество узлов подвески....................
Бортовая РЛС.................................
Дальность обнаружения цели с Сэоп^ 10 м2, км..
Вооружение:
управляемое ракетное..........................
неуправляемое ...........................
пушечное..............................
7100
2175/ 1450
17,8
225
1210
8,5
2,0
5
"Сапфир-21"
30
Р-ЗС, Р-13М, Р-55, Р-60
УБ-16 с НАР, С-5 (96 шт.),
бомбы калибра до 500 кг
(8x100,4x250, 2x500)
ГШ 23Л, 250 патронов
Рис.2.2.5. Истребитель МиГ-21
8-4094
113
Модификациями истребителя МиГ-21 были истребители-перехватчики
МиГ-21П (1961 г.) и МиГ-21ПФ (1962 г.) с РЛС "Сапфир-21" и управляемыми
ракетами Р-ЗС и Р-13М с РГС и ТГС. Они располагали боевыми возможно-
стями по уничтожению воздушных целей, летящих со скоростями до
1800 км/ч, с атакой со стороны задней полусферы, в том числе в любых ме-
теоусловиях, в диапазоне высот 1,0 ... 20 км. В качестве основного способа
боевых действий использовался перехват из положения "дежурство на аэро-
дроме" и при командном наведении с наземных КП голосом.
Истребители МиГ-21 в различных модификациях состояли и состоят на
вооружении более чем 27 стран. Они принимали участие практически во всех
локальных конфликтах, имевших место в послевоенный период, и показали
высокие боевые качества. Этими самолетами было установлено 17 мировых
рекордов, признанных ФАИ.
2.2.2. Специализированные перехватчики 3-го пок оления
Одним из крупных недостатков АКП Су-9 и Су-11 была невозможность
.уничтожения воздушных целей при атаке из передней полусферы, что суще-
ственно снижало располагаемые по топливу рубежи перехвата и возможности
по уничтожению скоростных целей. Развитие средств воздушного нападения
требовало реализации атак в переднюю полусферу целей. Необходимы были
наращивание энергетического потенциала бортовых РЛС и разработка всера-
курсных ракет. Эта задача была решена на АКП Як-28П, Су-15 и последую-
щих комплексах перехвата.
Истребитель-перехватчик Як-28П
Авиационный комплекс Як-28П (рис. 2.2.6), который начал поступать на
вооружение авиации ПВО в 1965 г., предназначался для уничтожения воздуш-
ных целей на малых и средних высотах, при атаках в переднюю и заднюю по-
лусферы, днем и ночью в любых погодных условиях. Располагая значительны-
ми дальностями полета, он мог решать задачи дальнего перехватчика. АКП Як-
28П был создан на базе фронтового многоцелевого истребителя Як-28.
Характеристики истребителя Як-28П
Экипаж, чел....................................................... 2
Взлетная масса нормальная/максимальная, т................... 15,7/18,4
Количество и тип двигателей............................. 1 хТРД РД-11АФ2-300
Тяга двигателя, кгс............................................. 5750
Максимальная скорость полета, км/ч...................... 1860 (1050 у земли)
Практический потолок, км........................................ 15
Максимальная эксплуатационная перегрузка................ 3
Максимальная дальность полета, км......................... 1910 (2700 с ПТБ)
Бортовая РЛС................................................ "Орел-Д (ДМ)"
Дальность обнаружения цели (<тЭОп ^10 м2), км................... 37
Управляемое ракетное вооружение (количество, тип).............. 2хР-98
Максимальная дальность пуска ракет, км........................... 18
Располагаемые по топливу рубежи перехвата в ППС/ЗПС, км:
при Н„=10 км................................................... 875/820
приНц=18км.................................................. 595/365
114
Рис. 2.2.6. Истребитель-перехватчик Як-28П
Боевые возможности АКП Як-28П по диапазону высот и скоростей пере-
хватываемых целей приведены на рис. 2.2.7.
В качестве основного способа боевого применения использовался пере-
хват из положения "дежурство на аэродроме" или из зон барражирования при
управлении и наведении от наземных КП (ПН).
По сравнению с комплексами, ранее принятыми на вооружение, Як-28П
располагал значительно большими рубежами перехвата, обеспечивал унич-
тожение воздушных целей с атакой в переднюю полусферу, имел лучшие
возможности, в том числе за счет двух членов экипажа, по уничтожению ма-
ловысотных целей. Кроме того, ведение боевых действий из зон барражиро-
вания обеспечивало перехват целей на вынесенных рубежах, особенно при
недостаточной глубине радиолокационного поля оповещения.
В дальнейшем вооружение перехватчика Як-28П было существенно уси-
лено. На двух дополнительных крыльевых пилонах разместили ракеты ближ-
него боя Р-ЗС. Таким образом, общее число ракет достигло четырех.
Самолет Як-28 серийно производился как перехватчик, многоцелевой ис-
требитель, фронтовой бомбардировщик, разведчик, постановщик помех.
Рис. 2.2.7. Зона возможного перехвата истребителя Як-28П
115
в*
Истребитель-перехватчик Су-15
В связи с развитием средств воздушного нападения с середины 60-х годов
продолжали интенсивно совершенствоваться как истребители ближнего дей-
ствия, так и дальние перехватчики. В 1965 г. на вооружение авиации ПВО
принимается АКП Су-15-98, претерпевший в последующие годы несколько
этапов модернизации: Су-15Т (1969 г.) и Су-15ТМ (1970 г.). Совершенствова-
ние этих комплексов шло по следующим направлениям:
• расширение диапазона высот и скоростей перехватываемых целей;
• обеспечение всеракурсности атаки;
• повышение эффективности и помехозащищенности системы вооружения;
• повышение степени автоматизации перехвата;
• обеспечение возможности ведения ближнего маневренного боя и дейст-
вия по наземным целям.
Основное назначение этих истребителей-перехватчиков - уничтожение
маневрирующих и неманеврирующих воздушных целей днем и ночью в любых
метеоусловиях, с атакой в переднюю и заднюю полусферы на малых, средних,
больших высотах и в стратосфере, в том числе специальных помехопостанов-
щиков, а также решение задач борьбы за превосходство в воздухе. Су-15
(рис. 2.2.8)- это первый в стране высотный истребитель-перехватчик, обеспе-
чивающий уничтожение целей на высотах до 23 км. На самолете впервые в
отечественной практике применяются бортовые плоские воздухозаборники.
Характеристики и данные истребителей Су-15
Экипаж, чел Взлетная масса Су-15-98 1 Су-15Т-98М 1 Су-15ТМ-98М 1
нормальная / максимальная, т 16,5/17,3 17,0/17,9 17,0/17,9
Количество и тип двигателей 2 х ТРД 2 х ТРД 2 х ТРД
Р-11Ф2С-300 Р-13Ф2С-300 Р-13Ф2С-300
Тяга двигателя, кгс Максимальная скорость полета 6100 6500 6500
на высоте / у земли, км/ч 2230/ 1100 2300/1300 2300/ 1300
Практический потолок, км Максимальная эксплуатационная 18,5 18,5 18,5
перегрузка 6,3 6,3 6,3
Максимальная дальность полета, км 1100...1300 1200... 1800 1200... 1800
Бортовая РЛС "Орел-Д-58М" "Тайфун" "Тайфун-М"
(РП-15М)
Дальность обнаружения цели (СТ)ОИ -Ю м2), км Управляемое ракетное вооружение 40 70 70
(количество, тип) 2хР-98 с РГС 2хР-98М с РГС 2хР-98М+2хР-60
иТГС иТГС
Максимальная дальность пуска
Ракет, км 18 25 25
Основные отличия истребителей-перехватчиков Су-15, Су-15Т, Су-15ТМ
следующие. На Су-15Т (ТМ) установлены новые двигатели с повышенной тя-
гой, бортовая РЛС "Тайфун" с увеличенной дальностью действия, повышен-
116
Рис.2.2.8. Истребители-перехватчики Су-15
ной помехозащищенностью, в том числе за счет дополнительного дальномер-
ного канала, и модернизированные ракеты Р-98М. На Су-15ТМ модернизиро-
вана бортовая РЛС и в дополнение к ракетам Р-98М размещены две ракеты
малой дальности Р-60 для ведения ближнего боя. Вместо ракет Р-60 могли
подвешиваться два контейнера УПК-23-250 с пушкой ГШ-23Л скорострель-
ностью 3000 выстр./мин и боекомплектом 250 патронов на каждую или обыч-
ные бомбы калибра до 500 кг.
Самолет Су-15ТМ отличался от своего предшественника Су-15 более со-
вершенной системой радиоуправления (установлены: радиосистема ближней
навигации РСБН-5С, станция предупреждения об облучении СПО-10 и сис-
тема автоматического управления САУ-58). Истребитель-перехватчик Су-
15ТМ имел более широкие боевые возможности, чем Су-15. В результате за-
мены РЛС РП-15М на РЛС "Тайфун-М" (РП-26) почти вдвое увеличилась
дальность обнаружения целей. Вследствие улучшения внешней аэродинамики
и установки новых двигателей Р-13-300 взамен Р-11-300 на 10 % увеличилась
дальность полета у земли и на высоте.
На Су-15ТМ система автоматического управления обеспечивала автома-
тический полет на перехват, возвращение на аэродром, заход на посадку и
выполнение предпосадочного маневра до высот 50 ... 60 м.
Боевые возможности этих комплексов по диапазону высот и скоростей
перехватываемых целей приведены на рис. 2.2.9.
Благодаря наличию в боекомплекте ракеты Р-98(М) комплекс становится
практически всеракурсным. На предельно малых высотах (Нц < 0,5 км) полета
целей возможности по перехвату ограничиваются условиями визуальной ви-
димости. В качестве основного способа боевого применения использовался
перехват из положения "дежурство на аэродроме" при управлении и наведе-
нии в наземных системах. Максимальные по топливу рубежи перехвата цели,
летящей на высоте Нц = 10 км, составляли 510 км при выводе в ППС цели и
340 км - в ЗПС.
Запущенный в серийное производство в начале 70-х годов, перехватчик
Су-15ТМ на протяжении многих лет оставался одним из основных истребите-
лей авиации ПВО страны. Было построено около 700 самолетов. Небольшая
партия Су-15 поставлена в Египет.
117
Комплекс Су-15ТМ-98М, куда входили самолет с ракетным вооружением
Р-98М и система наземного наведения "Воздух-1 М", обеспечивал в директор-
ном и автоматическом режимах перехват воздушных целей в диапазоне ско-
ростей 500...2500 км/ч и высот 500...24 000 м.
В ходе серийного производства самолеты постепенно дорабатывались.
Так, в частности, появилась возможность маловысотного перехвата; был ус-
тановлен радиопрозрачный обтекатель оживальной формы, улучшивший ха-
рактеристики РЛС.
Этот комплекс неоднократно использовался для пресечения нарушений
границы СССР. Он участвовал в трех известных инцидентах с иностранными
самолетами, несанкционированно вторгшимися на территорию страны; при-
влекался к уничтожению автоматических разведывательных аэростатов.
Перехватчик Ту-128
Наряду с созданием и развитием истребителей-перехватчиков ближнего
действия в этот период шла разработка дальнего перехватчика. В 1965 г. на
вооружение принимается авиационный ракетный комплекс дальнего перехва-
та Ту-128-С4, предназначенный для уничтожения средств воздушного напа-
дения на дальних подступах к обороняемым объектам. Бортовое оборудова-
ние и вооружение этого комплекса позволяли выполнять перехват целей днем
и ночью в любых погодных условиях на максимальных по запасу топлива
удалениях от аэродрома базирования и совершать маневры при ведении авто-
номных и полуавтономных действий.
118
мтгамм *
Рис. 2.2.10. Дальний перехватчик-ракетоносец Ту-128
По сравнению со стоящими в то время на вооружении истребителями-
перехватчиками АКП Ту-128-С4 имел следующие преимущества: значитель-
ная продолжительность полета и насыщенность современным пилотажно-
навигационным оборудованием; большие удаления рубежей перехвата; воз-
можность ведения автономных и полуавтономных действий благодаря боль-
шой дальности действия бортовой РЛС; возможность поражения целей на
больших дальностях, под любыми ракурсами и с превышением до 7...8 км.
В состав АКП Ту-128-С4 входили: самолет Ту-128 (рис. 2.2.10), бортовая
аппаратура радиоуправления с РЛС "Смерч" (РП-С), ракетное вооружение Р-4
с РГС и ТГС, наземная автоматизированная система управления и наведения.
В 1970 г. комплекс был модернизирован в направлении расширения высотно-
сти поражения целей за счет доработки ракеты (Р-4М) и РЛС (РП-СМ).
Характеристики комплекса перехвата Ту-128-С4
Экипаж, чел............................................
Взлетная масса, т......................................
Тип и количество двигателей............................
Тяга двигателя, кгс ...................................
Максимальная скорость полета на высоте / у земли, км/ч.
Практический потолок, км...............................
Максимальная эксплуатационная перегрузка...............
Максимальная дальность полета, км......................
Бортовая РЛС...........................................
Максимальная дальность обнаружения цели (гтэоп - Ю м2), км
Управляемое ракетное вооружение, (количество, тип)..
Максимальная дальность пуска ракет, км..............
Располагаемые по топливу рубежи перехвата в ППС/ЗПС, км:
при Нц= 5 км........................................
при Нц= 10 км....................................
при Н ц = 18 км..................................
2
43,65
2 х ТРД АЛ-7Ф2
10 100
1630/850
14,25
2,5
1400...2400
"Смерч" (РП-С),
"Смерч-М" (РП-СМ)
50
4хР-4 (М)
25
1090/820
1100/990
875 / 590
119
Особенностью комплекса являлось то, что в процессе перехвата самолет
не совершал маневров для выхода на высоту полета цели, как это делалось в
большинстве других АКП. В соответствии со сложившейся в то время идео-
логией перехвата считалось, что большая дальность полета ракет Р-4(М) и
возможность поражения ими объектов, летящих со значительными превыше-
ниями, позволяли самолету-носителю летать на средних высотах. Благодаря
этому самолет был рассчитан на перегрузки 2,0.. .2,5.
Из-за большой дальности обнаружения БРЛС не требовался точный вы-
вод самолета на цель с помощью наземной АСУ, он мог перехватывать цель и
самостоятельно. Это давало возможность применять его автономно в районах,
где не было поля систем автоматизированного наведения. В зоне ожидания
воздушных сил противника самолет мог барражировать 3.. .3,5 ч.
Обязанности экипажа распределялись следующим образом: летчик пило-
тировал самолет, осуществлял наведение на цель по командам наземной АСУ
и РЛС, а также выполнял пуск ракет; штурман-оператор выполнял прокладку
маршрута и самолетовождение в течение всего полета, поиск цели с помощью
РЛС, проводил ее опознавание и захват, а также поддерживал радиосвязь с
базовым аэродромом.
Боевые возможности по диапазону высот и скоростей перехватываемых
целей приведены на рис. 2.2.11.
Рис.2.2.11. Зона возможного перехвата истребителя Ту-128
В зависимости от складывающейся тактической обстановки применялись
следующие способы боевых действий Ту-128.
Перехват из положения "дежурство на аэродроме". Этот способ использу-
ется в случае, когда глубина оповещения о воздушном противнике от назем-
120
ных (корабельных) РЛС или с борта самолета РЛДН обеспечивает истребите-
лю-перехватчику выполнение боевых задач на заданных рубежах. Это наибо-
лее экономичный способ боевых действий по расходу сил и средств.
Перехват из положения "дежурство в воздухе". Этот способ применяется
при недостаточной глубине радиолокационного поля, когда уничтожение
воздушных целей на заданных рубежах не обеспечивается при вылете из го-
товности № 1. Дежурство в воздухе организуется на наиболее вероятных на-
правлениях и на время ожидаемого налета воздушного противника.
Полуавтономные боевые действия применяются в условиях отсутствия
сплошного радиолокационного поля. В этом случае перехват осуществляется
по заданной программе, рассчитанной по начальной информации о цели в со-
четании с самостоятельным поиском. Информация о воздушном противнике
может поступать на борт отрывочно. Формирование траектории полета про-
изводится штурманом на борту самолета (или на борту ведущего при группо-
вых действиях).
Автономные действия организуются при отсутствии информации о пара-
метрах полета целей, вне радиолокационного поля. При автономных действи-
ях поиск и уничтожение воздушного противника выполняются в полосе от-
ветственности; полет в район предполагаемого нахождения цели и ее поиск
осуществляются по программе, рассчитанной по информации, получаемой от
одного из средств обнаружения. В процессе полета на перехват возможен пе-
реход от автономного способа к полуавтономным действиям в зависимости от
поступающей информации о целях. Наиболее эффективны групповые полуав-
тономные и автономные действия с выдерживанием заданных боевых поряд-
ков. Истребители-перехватчики Ту-128 реализуют полет строем тремя спосо-
бами: с помощью бортовой РЛС, визуально, с помощью навигационной аппа-
ратуры. В последнем случае для обеспечения необходимой точности
маршрута и определения собственного местоположения перед началом поис-
ка выполнялась корректировка автономных координат по данным радионави-
гационной системы РСБН-2СА.
Групповые полеты требовали организации взаимодействия, что достига-
лось:
• выводом группы в район цели;
• целераспределением между перехватчиками группы;
• обеспечением собственной безопасности.
Выбор того или иного способа действий определялся такими условиями:
• начальной дальностью оповещения о воздушном противнике;
• удалением прикрываемых объектов от аэродрома вылета и заданных ру-
бежей перехвата;
• возможностями своих и взаимодействующих КП (ПН), радио- и радиоло-
кационных средств управления и наведения;
• скоростью и высотой полета целей;
• возможностями КП по одновременному наведению перехватчиков на
воздушные цели.
Кроме боевых машин серийно производился учебный вариант Ту-128Ш
для тренировки штурманов (1965 г.) и учебно-тренировочный вариант Ту-
128УТ(1966 г.).
121
Перехватчик МиГ-25
В конце 60 - начале 70-х годов в США продолжалась разработка новейших
средств воздушного нападения. В 1966 г. на вооружение принимается страте-
гический разведчик SR-71 с максимальной скоростью полета на высотах 18 км
и более, равной 3200 ... 3700 км/ч, и практическим потолком более 24 км.
В 1971 г. принимается стратегический бомбардировщик FB-111 (макси-
мальная скорость на высоте 2330 км/ч, у земли 1350 км/ч, практический пото-
лок 19,8 км) с бомбовым вооружением и аэробаллистическими ракетами
класса "воздух-земля" SRAM. В середине 70-х годов - стратегический бом-
бардировщик В-1А (максимальная скорость на высоте 2330 км/ч, у земли
1200 км/ч, практический потолок 15,2 км), вооруженный маловысотными
крылатыми ракетами ALCM. Ведется разработка многоцелевого истребителя
4-го поколения F-15 (серия с 1974 г.), а в последующем и его модификаций,
оптимизированных для решения задач воздушного боя и ударных задач; ко-
рабельного истребителя-перехватчика F-14 (серия с 1973 г.).
Совершенствуются способы и средства прорыва ПВО с использованием
всего располагаемого диапазона высот и скоростей полета пилотируемой
авиации и беспилотных средств, широко внедряются огневые средства подав-
ления ПВО управляемыми ракетами класса "воздух-поверхность", исполь-
зующими в системах управления различные диапазоны длин волн и методы
наведения, совершенствуются средства радиоэлектронного противодействия
индивидуальной и групповой защиты. В боевые порядки средств нападения
включаются истребители сопровождения с решением задач борьбы за превос-
ходство в воздухе путем ведения дальнего и ближнего боя.
Для борьбы с такими средствами нападения необходимы были и новые
средства перехвата. В конце 60-х годов в серийное производство запускается
АКП МиГ-25П-40, который в 1972 г. принимается на вооружение авиации
ПВО. Основное назначение комплекса - уничтожение воздушных целей днем
и ночью в любых погодных условиях, в широком диапазоне высот и скоро-
стей полета, в том числе высотных скоростных целей и специальных помехо-
постановщиков.
Состав комплекса:
• самолет МиГ-25П;
• система радиоуправления с бортовой РЛС "Смерч-А2" (РП-25);
• управляемое ракетное вооружение с РГС и ТГС;
• наземная система управления и наведения.
На самолете устанавливается система автоматического управления
САУ-155П, обеспечивающая автоматический полет на перехват, автоматиче-
ский возврат на заданный аэродром, выполнение предпосадочного маневра и
заход на посадку до высоты 50...60 м.
В 70-е годы комплекс МиГ-25П модернизируется в направлении повы-
шения боевых возможностей по уничтожению воздушных целей как на пре-
дельно малых, так и больших высотах за счет установки новой бортовой
РЛС "Сапфир-25", теплопеленгатора и доработанной ракеты Р-40Д. Прини-
маются меры помехозащищенности. В 1978 г. АКП МиГ-25ПД-40Д
(рис. 2.2.12) принимается на вооружение. В 1980 г. выполнена последняя
модернизация комплекса (МиГ-25ПМ). Он довооружается ракетой малой
дальности пуска Р-60(М).
122
Рис.2.2.12. Перехватчик МиГ-25ПД
Характеристики комплекса перехвата МиГ-25
МиГ-25П-40 МиГ-25ПД-40Д
Экипаж, чел Масса взлетная нормальная, т Количество и тип двигателей 1 36,72 2 х Р-15Б-300 1 37,43 2 х Р-15 БД-300
Тяга двигателя форсаж / максимал, кгс 11 200 / 7500 11 200 / 8800
Запас топлива во внутренних баках, кг 14 570 14 570
Максимальная скорость на высоте / у земли, км/ч.... 3000/ 1200 3000/1200
Практический потолок, км 20,7 20,7
Максимальная эксплуатационная перегрузка Максимальные по топливу рубежи перехвата в ППС / ЗПС, км: 4,5 5,0
при Н„ ~ 10 км - 705 / 450
при Н„ = 18 км - 500/310
Бортовая РЛС Смерч-A (А2)" "Сапфир-25”
дальность обнаружения цели (Оц = 10 м“), км... 90 100
дальность автосопровождения, км углы обзора, град: 50 75
по азимуту +60 ±56
по углу места ±6 ±6
Обзорно-следящий теплопеленгатор Дальность обнаружения ТП форсажной цели Отсутствует ТП-26Ш-1
в ППС, км - 90
Ракетное вооружение (количество, тип) ........ 2хР-40РД+2хР-40Т, 2хР-40РД+2хР-40ТД,
4хР-40Р,
40РД+4хР-60М
123
На комплексе МиГ-25ПД была установлена импульсно-доплеровская
РЛС с селекцией движущихся целей (СДЦ) в отличие от импульсной станции
на МиГ-25П и обзорно-следящий теплопеленгатор. Это позволяло обнаружи-
вать цели на фоне земли и обеспечивало их уничтожение на предельно малых
высотах полета (40.. .50 м).
Боевые возможности комплексов по диапазону высот и скоростей пере-
Рис. 2.2.13. Зоны возможного перехвата истребителя МиГ-25
В зависимости от конкретной тактической обстановки использовались
следующие способы боевых действий самолета: перехват из положения "де-
журство на аэродроме", перехват из положения "дежурство в воздухе", само-
стоятельный поиск и уничтожение воздушных целей.
Истребители-перехватчики МиГ-25П(ПД) для своего времени были наи-
более совершенными боевыми средствами авиации ПВО. Они обеспечивали
борьбу практически со всеми классами и типами средств воздушного нападе-
ния. Прототипу этого самолета Е-266 (1964 г.) принадлежит 25 мировых ре-
кордов, в том числе абсолютный рекорд высоты 37 650 м (1967 г.).
Истребители-перехватчики МиГ-25П и модификации на базе самолета
МиГ-25 (разведчик МиГ-25Р, разведчик-бомбардировщик МиГ-25РБ) постав-
лялись на Ближний Восток и в Индию. Они применялись в израильско-
египетском конфликте, ирано-иракской войне, во время боевых действий в
долине Бекаа (1982 г.).
По данным Aviation Week (январь 1998 г.), истребители-перехватчики
МиГ-25 состоят на вооружении восьми стран. Их парк составляет 260 самоле-
тов, из них наибольшее количество приходится на Ливию (63), Украину (86),
Сирию и Алжир (по 30 самолетов). В России на сохранении находится 45 пе-
рехватчиков МиГ-25ПД.
124
Истребитель МиГ-23
В 1974 г. на вооружение авиации ПВО принимается многоцелевой истре-
битель МиГ-23М, разработанный ранее для ВВС. Это было вызвано тем об-
стоятельством, что в тот период в связи с вводом в строй за рубежом истреби-
телей 4-го поколения актуальной становится задача борьбы за превосходство
в воздухе. В последующие годы истребитель МиГ-23М подвергался неодно-
кратной модернизации: МиГ-23МЛ (1975 г.), МиГ-23МЛА (1977 г.), МиГ-23П
(1978 г.). Истребитель МиГ-23П был разработан специально для авиации
ПВО, представлял собой облегченный вариант МиГ-23МЛ. Он предназначал-
ся для уничтожения:
• маневрирующих и неманеврирующих воздушных целей с атакой в перед-
нюю и заднюю полусферы, днем и ночью в любых метеоусловиях, в том
числе на фоне земли и радиоконтрастной облачности;
• помехопостановщиков активных, пассивных и комбинированных помех;
• воздушных целей в ближнем воздушном бою и в бою на средних дально-
стях;
• наземных целей в условиях визуальной видимости.
Истребитель МиГ-23М(П) значительно превосходил по возможностям
ведения маневренного воздушного боя самолеты МиГ-25П(ПД), Су-15(Т,ТМ).
Отличительной особенностью истребителя МиГ-23М(П) (рис. 2.2.14) по срав-
нению с другими типами истребителей является установка на нем крыла с из-
меняемой в полете стреловидностью.
Технические характеристики комплекса МиГ-23
Экипаж,чел МиГ-23М 1 МЙГ-23П 1
Масса взлетная нормальная, кг 15,7 14.7
Двигатель Р-29-300 Р-35Ф
Тяга двигателя, кгс 12 300 13 000
Максимальная скорость (%=72°)
на высоте/у земли, км/ч 2500/1350 2500/1350
Практический потолок, км 17,5 18,35
Максимальная эксплуатационная перегрузка 7,5 8,5
Располагаемые по топливу рубежи перехвата
в ППС / ЗПС , км при Нц= 10... 18 км — 320/150
Бортовая РЛС "Сапфир-23 Д-З" РП-24П
дальность обнаружения цели (Оц = 10 м“), км 40 70
дальность сопровождения, км - 55
сектор обзора, град:
по азимуту — ±30
по углу места — 6
Обзорно-следящий теплопеленгатор ТП-23 ТП-23М (26Ш-1)
Дальность обнаружения ТП, км 25...35 25...50
Оптический прицел АСП-23Д АСП-23ДЦМ-П
Ракетное вооружение класса "воздух-воздух" 2хР-23Р+2хР-23Т, 2хР-24Р+2хР-23Т,
2хР-23+2хК-13М 2хР-24+2хР-60(М)
или Р-60, Р-ЗС или К-13М, Р-ЗС
Пушка двуствольная, тип / калибр / боекомплект.. ГШ-23Л / 23 / 260 ГШ-23Л / 23 / 260
Вооружение класса "воздух - поверхность" Имеется Имеется
125
Рис. 2.2.14. Истребитель МиГ-23
На истребителе МиГ-23П установлена система автоматического управле-
ния САУ-23ПМ, обеспечивающая:
• директорное управление самолетом в продольном и боковом каналах в
режиме наземного наведения и самонаведения с меткой тяги двигателя;
• автоматическое и директорное управление на этапах "Маршрут", "Воз-
врат", "Заход на посадку" со снижением до высот 50...60 м;
• автоматический увод с заданной малой высоты, стабилизацию заданных
углов крена, тангажа, курса, приведение к горизонту.
Боевые возможности истребителя по диапазону высот и скоростей пере-
хватываемых целей приведены на рис. 2.2.15.
Рис.2.2.15. Зоны возможного перехвата истребителя МиГ-23
126
В результате ряда доработок, проведенных к 1984 г., существенно повы-
сились маневренные характеристики истребителя (он получил обозначение
МиГ-23МЛД); до этого уровня было доведено большинство самолетов
МиГ-23МЛ и МиГ-23П. Изменения, внесенные в аэродинамику ("клыки" в
корневой части крыла, вихреобразующие пластины на приемнике воздушного
давления, автоматически отклоняемый носок крыла) и систему управления,
обеспечили улучшение устойчивости и управляемости на больших углах ата-
ки. На самолете МиГ-23МЛД устанавливались:
• доработанная САУ с повышенным уровнем автоматизации наведения от
наземной АСУ;
• система ограничительных сигналов СОС-3-4, облегчающая пилотирова-
ние на больших углах атаки и предотвращающая сваливание;
• аэродинамические гребни на неподвижных частях крыла с ИК-ловуш-
ками для защиты самолета на малых высотах.
Летные данные и маневренные характеристики самолета МиГ-23МЛД
близки к характеристикам ряда зарубежных истребителей 4-го поколения. До
появления на вооружении советских ВВС и войск ПВО самолетов МиГ-29 и
Су-27 истребитель МиГ-23МЛД являлся единственным истребителем, спо-
собным успешно вести воздушные бои с американскими самолетами F-15, F-
16, F/A-18. На протяжении 80-х годов МиГ-23П и МиГ-23МЛД составляли
основу авиации ПВО страны.
Самолет МиГ-23 поставлялся в более чем двадцать стран мира; он участ-
вовал и хорошо себя зарекомендовал во всех арабо-израильских конфликтах,
в боевых действиях в Эфиопии, Анголе, Афганистане. И в настоящее время
истребители МиГ-23 остаются на вооружении ряда стран, выполняя задачи
ПВО, учебно-боевые и др. (модификации МиГ-23М, -МЛ, -МФ). Наибольшее
их количество находится в Чехии (100 самолетов), Ливии и Индии (по 130 са-
молетов), на Украине (140). В России в составе резерва - 270 истребителей.
2.3. Самолеты "МиГ” в авиации ПВО страны*
2.3.1. Эволюция требований к истребителям-перехватчикам
С момента основания 08.12.39 г. ОКБ им. А.И. Микояна (АНПК "МиГ") на
протяжении 60 лет его существования задача создания передовой авиационной
техники для авиации ПВО являлась приоритетной как для коллектива ОКБ, так
и для работающих совместно над новыми самолетами организаций Министер-
ства обороны, институтов промышленности в областях двигателестроения,
вооружения, бортового оборудования, систем наведения. Для авиации ПВО
разрабатывались специализированные перехватчики; для решения задач воз-
душной обороны широко использовались также истребители и их варианты.
Задача создания эффективных серийных самолетов для ПВО страны была
чрезвычайно сложной. В первую очередь это было вызвано необходимостью
достичь превосходства над характеристиками средств нападения. Например,
эффективный перехват околозвуковых бомбардировщиков возможно осуще-
ствить лишь с помощью сверхзвуковых перехватчиков, создание которых
явилось дорогостоящей наукоемкой задачей. Требования к перехватчикам по
высотности, скорости, составу комплекса оборудования и вооружения часто
были столь высокими, что ограничиться использованием даже лучших истре-
бителей, созданных для обеспечения превосходства в воздушных боях, или их
специальных модификаций оказывалось не всегда возможным. Из 450 проек-
тов, разрабатываемых в ОКБ, значительную часть составили либо специали-
зированные самолеты-перехватчики и истребители, созданные по требовани-
ям ВВС, использованные в авиации ПВО, либо их специальные модификации,
разрабатываемые для решения задач ПВО (табл. 2.3.1).
Эволюция требований к специализированным истребителям-перехват-
чикам представлена в табл. 2.3.2.
Таблица 2.3.1
Количественные данные разработок ОКБ им. А. И. Микояна
Тип разработки В серии Опытных самолетов Проектов Всего
Специализированные самолеты- перехватчики 8 29 13 50
Истребители и их модификации, пред- назначенные или используемые в ПВО 23 20 4 47
В написании подраздела принимал участие А. А. Белосвет.
128
4094
Этапы развития требований к специализированным истребителям-перехватчикам и их реализации
Таблица 2.3.2
Год Цель Облик перехватчика Способ перехвата Перехватчики ОКБ “МиГ” Приме- чание
1946 Объектовая защита от высотных СБ типа В-29, В-50, В-36 с ядерными бомбами Реактивный дозвуковой самолет с БРЛС, пушечным вооружением и системой "сле- пой" посадки Перехват в ЗПС на малых (до 100 км) рубежах "голосом" по данным наземной РЛС И-270 (Ж) И-320 Опытные самолеты,
1952 Объектовая защита от высотных дозвуковых ре- активных СБ типа В-47,В-52, "Виктор", "Вали- ент", "Вулкан" с ядерными и обычными бомбами Реактивный сверхзвуковой самолет с БРЛС, пушечным вооружением и системой "слепой" посадки Перехват в ЗПС на малых ру- бежах "голосом" по данным наземной РЛС. Начало работ по автоматизации наведения И-3, И-7У, Е-50, 50А не приня- тые на во- оружение
1960 Объектовая защита от высотных сверхзвуковых (В-58) н дозвуковых бомбардировщиков с ядер- нымн н обычными бомбами, а также высотных разведчиков типа U-2, RB-57 Реактивный сверхзвуковой (М до 2,83) вы- сотный самолет с БРЛС, ракетным воору- жением, счетно-решающим прибором и автопилотом Всеракурсный перехват на увеличенных рубежах с ис- пользованием автоматической системы наведения И-75, Е-150, Е-152, Е-152А, Е-152М
1967 Защита территории от высокоскоростных бом- бардировщиков В-70, разведчиков SR-71 и более тихоходных самолетов с ракетным ("Хаунд Дог") и бомбовым оружием Длительный полет с высокой сверхзвуко- вой скоростью. Рост возможностей БРЛС, ТП, ракетного оружия и автоматизации полета Всеракурсный перехват на значительных рубежах с ис- пользованием более совер- шенных РЛС, ракет и АСУ МиГ-25П и варианты на его базе Серия
1976 Защита регионов и направлений от бомбарди- ровщиков типа В-1А, В-52 с крылатыми ракета- ми, а также высотных, сверхзвуковых (М=3) раз- ведчиков SR-71 Сверхзвуковой самолет с большим радиу- сом полета, временем барражирования, РЛС с ФАР, многоканальным наведением, РБД Автономные групповые дей- ствия или наведение от АК РЛДН или от наземной АСУ МиГ-31, МиГ-31 Б, МИГ-31БС
1985 Защита направлений от групповых налетов СБ с крылатыми ракетами большой дальности, эскор- тируемых истребителями сопровождения. Опре- деление способов перехвата гиперзвуков ых, трансатмосферных и космических целей Самолет, обеспечивающий высокие рубе- жи перехвата за счет роста дальности и(или) скорости полета, обеспечение борь- бы с малозаметными целями Дальнейшее расширение воз- можностей автономных и групповых действий Модификации Миг-31 Устано- вочная серия
2000 Отражение концентрированных групповых уда- ров истребителей, ударных самолетов, ДПЛА, самолетов РЭБ, крылатых ракет Высокоманевренный, самолет, обеспечи- вающий выигрыш группового боя с истре- бителями противника. Высокая скорость концентрации сил на направлении удара Групповой бой, обеспечение многофункциональности (бой, перехват, нанесение ударов по наземным и морским целям) МФИ Опытный самолет
2.3.2. Специализированные перехватчики разработки
ОКБ им. А. И. Микояна
Основные характеристики специализированных реактивных перехватчи-
ков приведены в табл. 2.3.3, а краткое описание самолетов дается ниже.
Первым специализированным перехватчиком с использованием принци-
па реактивной тяги стал И-270Ж, созданный в конце 1946 г. До этого в
1945 г. был запущен в малую серию самолет И-250Н с комбинированной си-
ловой установкой - основным поршневым двигателем, который помимо воз-
душного винта мог работать на привод компрессора воздушно-реактивного
двигателя, и поднявшийся на несколько месяцев ранее истребитель И-300
(будущий МиГ-9) с двумя турбореактивными двигателями. На создание
И-270Ж повлиял опыт достаточно успешного боевого применения самолета
Me-163, трофейные образцы которого прошли испытания в летно-
исследовательском институте ВВС, опыт по самолету Би-1 и большое коли-
чество аналогичных проектов, выполненных как в СССР, так и в других
странах. Привлекала внимание возможность относительно простого получе-
ния высоких скоростей, высот, скороподъемности, а также ожидавшаяся де-
шевизна постройки. Недостатки Ме-163, Би-1 предполагалось устранить за
счет применения нормальной аэродинамической схемы (Ме-163 - бесхвостка,
достаточно сложная в управлении), Т-образного оперения (для исключения
влияния скоса потока); отсутствие регулировки тяги смягчалось наличием
двух камер ЖРД с различными тягами, что давало не один, а три уровня тяги
работающего двигателя. Отработка ЖРД затянулась, с появлением в серии
МиГ-9 интерес к И-270 был потерян, к тому же оба построенных экземпляра
получили повреждения в результате внеаэродромных посадок.
Самолет И-320 - дозвуковой перехватчик с РЛС и пушечным вооружени-
ем - был создан для участия в конкурсе, проводившемся совместно с ОКБ
главных конструкторов П. О. Сухого, С. А. Лавочкина и А. А. Яковлева.
В аэродинамической схеме и силовой установке учитывался, с одной сторо-
ны, опыт работ над самолетами МиГ-9 и МиГ-15, с другой стороны, была
применена необычная по расположению силовая установка (двигатели раз-
мещены уступом друг над другом: один впереди с реданным соплом, второй
сзади с соплом в хвостовой части фюзеляжа); экипаж располагался рядом
друг с другом, приблизительно в середине фюзеляжа; РЛС размещалась над
лобовым воздухозаборником. Было построено два экземпляра опытного са-
молета: Р-1 и Р-2; один из них после модификации получил название Р-3. Ис-
пытывали БРЛС "Коршун" и "Торий-А", выполнили большое количество по-
летов, однако довести РЛС по надежности и удобству управления экипажем
так и не удалось, и в серийное производство был запущен построенный позд-
нее Як-25 с РЛС "Сокол".
Проект И-350(М) - сверхзвуковой истребитель-перехватчик, по аэродина-
мической схеме подобный будущему МиГ-19, но с одним двигателем
ТР-ЗА(АЛ-5) главного конструктора А.М. Люльки. Предусматривалась уста-
новка РЛС "Изумруд" (аналогично МиГ-17П). Вооружение - одна пушка
Н-37Д и две пушки НР-23 по типу установленных на самолетах МиГ-15,
130
Основные характеристики перехватчиков
Таблица 2.3.3
Данные И-270Ж И-320 И-ЗУ* И-7У (И-75) Е-50 Е-152А Е-152 Е-152М МиГ-25П МиГ-25ПД МиГ-31 (МиГ-31Б)
Гол 1946 1949 1956 1957 1956 1959 1961 1961 1969 1978 1979
Двигатель РД-2М (ЖРД) ВК-1 ВК-3 АЛ-7Ф (АЛ-7Ф-1) АМ-9Е+ С-155 (ЖРД) Р-ПФ-300 Р-15- 300 Р-15Б-ЗОО Р-15Б-300 Р-15 БД-300 Д-30Ф6
Тяга, кгс 1050+400 2x2700 3440 9220 3800+1300 2x5740 10210 11200 2x11200 2x11200 2x15500
Взлетная масса, т 4,12 10,265 - 10,950 8,5 13,96 - 15,5 36,72 36,72 41
Максималь- ная скорость, км/ч 1000 1040 - 2050 2460 2500 2740 3000 (расчет) 3000 3000 3000
Потолок, км 18 15 - 21 25,6 19,8 22,5 22,67 20,7 20,6
Дальность полета, км - 1100 - 1470 450 1000 2000 1730 3000
Ракетное вооружение Пушки 2хНС-23 ЗхН-37 2хНР-ЗО 2хК-8 (на И-7У нет) 2хНР-30 (на И-75 нет) 2хНР-30 2хК-9 2хК-9 2хК-8 4хР-40 4хР-40 или 2хР-40+ 4хР-60 4хР-33+2хР-40Т или 4хР-60 ГШ-6-23
РЛС - "Торий-А" ("Коршун") "Алмаз" "Ураган-5Б" - ЦП ЦП "Ураган-5Б!' или "Орел" "Смерч-А" "Сапфир-25" "Заслон"
Бортовой вычислитель - - Аналоговый "Ураган-1Д" Аналоговый "Ураган-5Д" - Аналогового типа "Ураган-5Д" Аналоговый в составе СУВ Цифровой "Аргон-15"
КРУ и ли- нии переда- чи данных - - "Ураган-1Т" "Ураган-5Т" - "Лазурь" "Лазурь" "Бирюза" "Бирюза" и АПД-518
Автопилот - - АП-36 АП-36 - АП-39 САУ-155П САУ-155П-1 САУ-155МП
* Самолет ИЗУ не летал.
МиГ-17. Первый вылет состоялся летом 1951 г. и только благодаря мастер-
ству Г. А. Седова, пилотировавшего самолет несмотря на отказ двигателя, он
завершился благополучно; программа по самолету была закрыта. Проводи-
лись проектные работы еще над двумя вариантами самолета.
С середины 50-х годов и до начала работ по самолету МиГ-31 создание
специализированных перехватчиков вел назначенный заместителем главного
конструктора, а затем и главным конструктором Н. 3. Матюк, под руково-
дством которого построены три опытных самолета серии "И" (И-ЗУ, И-7У,
И-75), опытные самолеты семейства Е-150 (Е-152А, Е-152, Е-152М) и серий-
ные самолеты семейства Е-155П (МиГ-25П, МиГ-25ПД, МиГ-25ПДС), за ис-
ключением работ по опытному перехватчику Е-50, созданием которого руко-
водил А. Г. Брунов.
Генеральные конструкторы А. И. Микоян, а затем Р. А. Беляков внесли
решающий вклад в определение тематики, обоснование облика самолетов, ор-
ганизацию кооперации, утверждали аван- и эскизные проекты, чертежи ос-
новных агрегатов и систем, планы и очередность работ. Принимаемые ими
решения носили окончательный характер.
Опытные самолеты серии "И"
Буква У в конце номера самолета означала, что он включен в систему пе-
рехвата "Ураган", в которую помимо перехватчика входили наземная РЛС
обнаружения воздушных целей, пункт выработки команд наведения, система
передачи на борт перехватчика команд. В систему "Ураган-5" кроме истреби-
телей-перехватчиков входили и зенитные ракеты "Даль", созданные в ОКБ
главного конструктора С. А. Лавочкина.
На борту перехватчика для автоматизации процесса наведения устанав-
ливались состыкованные между собой бортовая часть линии наведения (ана-
логовое вычислительное устройство), автопилот (система автоматического
управления), бортовой радиолокатор, а на последних образцах и управляемые
ракеты класса "воздух-воздух".
Аэродинамическая схема самолета - среднеплан со стреловидным кры-
лом (угол стреловидности ~ 60°), стреловидным цельноповоротным стабили-
затором, стреловидным килем; шасси с носовым колесом; РЛС размещалась в
верхней передней части фюзеляжа перед кабиной пилота.
И-ЗУ (другие названия И-5, И-420) являлся модификацией истребителя
И-3, отличаясь от него:
• установкой БРЛС "Алмаз";
• аналоговым вычислителем разработки ОКБ-857 (ныне Санкт-
Петербургское объединение "Электроавтоматика");
• автопшютом АП-36 разработки ОКБ-118 (ныне организация "Авионика").
Ввиду "недоведенности" двигателя самолет так и не поднялся в воздух.
И-7У по аэродинамической схеме подобен И-ЗУ, однако конструкция са-
молета практически полностью новая, что связано с применением более мощ-
ного двигателя АЛ-7Ф; изменилась схема уборки основных стоек шасси, вне-
132
дрены новые технологии создания панелей и ряда узлов конструкции. Обору-
дование, обеспечивающее работу в системе "Ураган-1", сохранилось.
И-75 - модернизация опытного самолета И-7У; он должен был использо-
ваться в более совершенной системе "Ураган-5" вместо "Ураган-1". На само-
лете установлена более мощная РЛС, новый автопилот, вычислитель, прием-
ник командной радиолинии, вместо пушечного вооружения использовались
две ракеты класса "воздух-воздух" К-8 с полуактивной радиолокационной го-
ловкой самонаведения. Кроме того, увеличена площадь киля, поставлено но-
вое, унифицированное катапультное кресло, введены тормозные парашюты,
установлен двигатель АЛ-7Ф-1.
Самолет И-75 показал высокие характеристики, однако А.И. Микоян ре-
шил прекратить по нему работы в интересах концентрации усилий на самоле-
тах семейства Е-150, возможности которых были значительно выше.
Е-50 и Е-50А. Базой для самолетов послужила конструкция самолета
Е-2 (Е-2А) - варианта предшественника МиГ-21 со стреловидным крылом - и
работы по самолету МиГ-19 с подвешенной под фюзеляжем в контейнере до-
полнительной силовой установкой с жидкостным реактивным двигателем
(СМ-12ПМУ, СМ-50). Использовались носовая часть фюзеляжа, крыло, ста-
билизатор и шасси самолета Е-2, однако наличие по сути новой силовой уста-
новки - модифицированного ТРД АМ-9М - и размещение ЖРД С-155, топли-
ва и окислителя в основном в нижней части киля позволяют говорить по сути
о новом самолете с выдающимися для середины 50-х годов значениями мак-
симальной скорости и высоты полета. К сожалению, отсутствие БРЛС, управ-
ляемого оружия, аппаратуры наведения при кратковременности полета на
максимальных режимах не обеспечивало эффективного использования само-
лета как перехватчика. Построено три опытных самолета семейства Е-50. Са-
молет Е-50А характерен наличием ТРД AM-11 и размещением ряда элемен-
тов, связанных с ЖРД, в подфюзеляжном контейнере.
Повреждение Е-50/1 при посадке и катастрофа Е-50/3, наличие опасных
отказов и взрыв в процессе наземной отработки привели к прекращению ра-
бот по этому самолету.
Семейство самолетов Е-150
В состав семейства вошли:
• опытный экспериментальный самолет Е-150 для отработки двигателя
Р-15-300 и конструкции, обеспечивающих полет со скоростью
2800...3000 км/ч;
• проект Е-151 - перехватчик с подвижной пушечной установкой в осях
Можаровского. На фюзеляже установлено подвижное кольцо (перед каби-
ной на Е-151/1 и за кабиной - на Е-151/2), по диаметру которого располо-
жены две пушки калибра 30 мм, вращающиеся относительно диаметра.
Поворот кольца и стволов пушек обеспечивал значительный конус стрель-
бы; предполагалось обеспечение всеракурсного перехвата, в том числе в
переднюю полусферу. Боекомплект размещался в подвижном кольце. Са-
молеты не были построены ввиду малой эффективной дальности стрельбы
и неясности влияния отдачи пушек на устойчивость полета самолета;
133
• опытный самолет Е-152А с двумя двигателями Р-ПФ-300 (от самолета
МиГ-21) для отработки, прежде всего, РЛС ЦП и ракет К-9 (единственная
попытка АНПК "МиГ" создания ракеты класса "воздух-воздух" совмест-
но с ЦКБ "Алмаз" - разработчиком аппаратуры управления ракеты и по-
луактивной радиолокационной головки самонаведения). Управление ра-
кетой осуществлялось поворотом крыла;
• опытный самолет Е-152. Построено два экземпляра; предполагалось объ-
единить на этом самолете все достижения, реализованные на самолетах
Е-150 и Е-152А. Однако из-за перехода ЦКБ "Алмаз" на другую тематику
работы по БРЛС и ракете К-9 были прекращены на стадии успешной реа-
лизации примерно 60 % объема летных испытаний; на этом самолете (под
индексом Е-166) установлена серия мировых рекордов скорости и высоты
полета;
• опытный самолет Е-152М, отличающийся от Е-152 увеличенным запасом
топлива. Предполагалась установка других типов радиолокатора и ракет
класса "воздух - воздух".
Самолет Е-150 - классической схемы, с фюзеляжем, близким по форме к
цилиндру, среднерасположенным треугольным крылом, цельноповоротным
стабилизатором и стреловидным килем. Воздухозаборник лобовой с трехсту-
пенчатым конусом и подвижной обечайкой. Шасси классической схемы с но-
совым колесом. На Е-150 установлен двигатель Р-15-300; на Е-152А двигате-
ли Р-11Ф-300 расположены рядом, как на МиГ-19.
На самолете Е-152М дополнительное топливо размещалось в развитом
гроте, а также в подвесном баке; предусматривалось введение дестабилизато-
ра и крыла с законцовками увеличенной площади, хотя в летных испытаниях
они не использовались. Менялось и расположение ракет - подвеска под кры-
лом посредине консолей крыла и на законцовках крыла (последние варианты
из-за недостаточной жесткости приводили к осложнениям при пуске ракет).
Изменение идеологии построения систем ПВО потребовало значительно-
го увеличения дальности полета на большой сверхзвуковой скорости, что не
могло быть реализовано на самолетах данного семейства из-за высокого ки-
нетического нагрева дюралевой конструкции, дальнейшего роста потребного
запаса топлива и необходимости размещения БРЛС со значительно большей
дальностью обнаружения целей.
Семейство самолетов МиГ-25П (Е-155П)
В состав семейства вошли:
• опытные самолеты Е-155П (П1 -г П5);
• серийный перехватчик МиГ-25П;
• самолеты МиГ-25П с модернизированными РЛС, последовательно
"Смерч А-1", "Смерч А-2 (-3, -4)";
• серийный перехватчик МиГ-25ПД (рис. 2.3.1);
• серийные самолеты МиГ-25ПДС, полученные путем модернизации ранее
выпущенных МиГ-25П;
• опытные самолеты МиГ-25М, "99", МиГ-25ПДСЛ, МиГ-25ПДЗ.
134
Рис.2.3.1. Перехватчик МиГ-25ПД
Кроме того, в рамках семейства создан учебно-тренировочный самолет
МиГ-25ПУ, а также разработан ряд проектов самолетов другого назначения
(разведки и т. д.).
В процессе создания МиГ-25 были отработаны:
• новая для фирмы "МиГ" аэродинамическая схема с боковыми воздухоза-
борниками, высокорасположенным тонким, трапециевидным крылом,
двумя килями, двумя подфюзеляжными гребнями и среднерасположен-
ным цельноповоротным стабилизатором;
• . обеспечение высокого аэродинамического качества, устойчивости и
управляемости в широком диапазоне скоростей и высот (до числа М = 3);
• сварная конструкция из нержавеющей стали и топливная система, обес-
печивающая длительный полет с высокими сверхзвуковыми скоростями,
имеющие повышенную технологичность и ремонтопригодность;
• высокоэффективный боевой комплекс;
• автоматизация режимов полета, за исключением непосредственно взлета,
посадки и снижения с больших высот.
На первых опытных самолетах устанавливалось всего лишь по две ракеты
Р-40, на концах крыла имелись ласты. На серийных самолетах МиГ-25П чис-
ло ракет Р-40 увеличилось до четырех, а на МиГ-25ПД и МиГ-25ПДС воз-
можна либо подвеска четырех модифицированных ракет Р-40Д, либо двух ра-
кет Р-40Д и четырех Р-60 (Р-60М), т. е. до шести суммарно; ласты ликвидиро-
ваны, введено отрицательное поперечное "V" крыла, увеличена площадь
килей и уменьшена высота подфюзеляжных гребней. Предусмотренное про-
ектом переднее горизонтальное оперение не устанавливалось ни на опытных,
ни на серийных самолетах. Несколько позднее введено дифференциальное
отклонение стабилизатора, что позволило увеличить приборную скорость по-
лета до 1300 км/ч.
На первом опытном самолете были установлены двигатели Р-15Б-300, во
многом отработанные на Е-150, Е-152, Е-152М. На самолетах МиГ-25ПД и
135
ПДС- двигатель Р-15БД-300, коробка приводов которого обеспечивала при-
менение новых генераторов переменного трехфазного тока (на Р-15Б-300-
однофазный).
На самолете МиГ-25 М отрабатывался более мощный двигатель
Р-15БФ-2-300, который (при условии доработки самолета) мог обеспечить
дальнейшее увеличение допустимого числа М до 3...3,2, а также (благодаря
большей тяге и экономичности) увеличить дальность и высотность полета. На
самолете проекта "99" установили двигатель Д-30Ф6 (как на МиГ-31) и полу-
чили значительное увеличение дальности полета, особенно на дозвуковых
режимах полета.
В основу конструкции МиГ-25 положена сварная бак-конструкция (80%):
через фюзеляж, образованный 14 силовыми шпангоутами, проходят воздухоза-
борники, которые в начале имеют прямоугольную форму с переменным сече-
нием (в зависимости от числа М полета и режима работы двигателя), образуе-
мым регулируемыми верхним клином и нижней губой; в дальнейшем сечение
становится круглым, с ним через уплотнительное кольцо стыкуются передние
фланцы двигателей. Центральная часть крыла также представляет собой бак-
конструкцию, в передней части которой установлены предкрылки из титана, а
закрылки, элероны и аэродинамические гребни на верхней поверхности крыла
выполнены из дюралюминия с использованием сотовых панелей.
Шасси самолета - нормальной схемы, с колесами большого диаметра ос-
новных стоек, убирается в фюзеляж; использование сложной кинематики ос-
новных стоек обеспечивает увеличение колеи колес и компактную их уборку
в отсек ограниченных размеров между каналами воздухозаборников и наруж-
ной обшивкой.
Особое внимание уделено системе охлаждения, обеспечивающей нор-
мальные температурные условия в кабине, а также в отсеках оборудования,
имеющих ряд мощных тепловыделяющих элементов: РЛС, генераторы, ра-
диопередатчики и т. д.
С целью сокращения объема испытаний в максимально возможной степе-
ни использованы отработанные или унифицированные элементы, в том числе
модификация РЛС "Смерч" самолета-перехватчика Ту-128 ("Смерч А"). РЛС
МиГ-25П "Смерч А" импульсного типа могли обнаруживать воздушные цели
на дальности более 50 км, но лишь в свободном пространстве. Модификации с
индексами от А-1 до А-4, особенно последние, имели ограниченные возможно-
сти работы на фоне земли. Коренное изменение ситуации достигнуто на само-
летах МиГ-25ПД и МиГ-25ПДС, оснащенных БРЛС "Сапфир-25" (выполнена
на базе "Сапфир-23" самолета МиГ-23) с увеличенным диаметром антенны и
соответствующими доработками в радиотехническом тракте и параметрах ана-
логового вычислительного устройства. Дальность обнаружения целей достига-
ла 100 км. На этих же самолетах был установлен теплопеленгатор, обеспечив-
ший рост помехозащиты и возможность выполнения скрытых атак. Основными
системами оборудования являлись унифицированная система "Полет-1 И"
(в составе: курсовертикаль, система воздушных сигналов, радиосистема ближ-
ней навигации и система автоматического управления); бортовая часть ко-
мандной радиолинии "Лазурь", впоследствии замененной на более совершен-
ную, а также системы госопознавания и связи. Средства радиопротиводействия
включали в себя лишь станцию оповещения об облучении; на самолетах
136
МиГ-25ПДСЛ дополнительно устанавливались станция активных радиопомех
и устройство выброса ложных целей. Самолет МиГ-25ПДЗ отличался введени-
ем системы дозаправки в воздухе.
Семейство самолетов МиГ-31
Первоначально самолет Е-155М был задан в трех вариантах - перехват-
чика Е-155МП, ударного фронтового самолета и самолета-разведчика, однако
был построен лишь первый вариант (перехватчика) и как МиГ-31 запущен в
серию. На начальной стадии самолет рассматривался как дальнейшее разви-
тие самолета МиГ-25, что не исключало проведения исследований по другим
вариантам компоновки - с крылом измененной стреловидности, вариант бес-
хвостки и т. д.
В состав семейства вошли:
• МиГ-31 (рис. 2.3.2) - базовый серийный истребитель-перехватчик;
• МиГ-31Б- модернизированный, в основном по рекомендациям акта Го-
сударственных испытаний, серийный истребитель-перехватчик;
• МиГ-31БС- модификация серийных, ранее построенных самолетов
МиГ-31 в облике МиГ-31Б;
• МиГ-31М- коренная модернизация самолетов. Выпущена установочная
партия.
Рис.2.3.2. Перехватчик МиГ-31
Опытные самолеты МиГ-31 создавались для решения специализированных
задач; они явились также базой для проведения ряда научно-исследовательских
работ, в том числе обеспечения наведения самолета на больших дальностях,
повышения вероятности поражения низколетящих (на высотах несколько мет-
ров) целей и т. д. Проектировались самолеты со значительно увеличенными
рубежами поражения целей; производство самолетов не прекращено, ведутся
работы по многоцелевому варианту самолета (МиГ-31М). Проектируется са-
молет, обеспечивающий запуск ракет - носителей ИСЗ.
По аэродинамической схеме, размерности, типу конструкции, применяе-
мым материалам самолет МиГ-31 близок к МиГ-25. К основным отличиям
можно отнести:
137
• новую носовую часть с тандемным расположением членов экипажа, раз-
мещением нового оборудования (прежде всего, БРЛС системы "Заслон");
• установку более мощных двухконтурных двигателей Д-30Ф6;
• крыло с аэродинамическими наплывами в корневой части;
• четырехсекционные предкрылки, закрылки и элероны, занимающие прак-
тически весь "размах" задней кромки крыла; введение в конструкцию кры-
ла третьего лонжерона с одновременным увеличением прочности заборни-
ков и крыла позволило увеличить приборную скорость полета; предусмот-
рена возможность установки подвесных топливных баков под крылом;
• изменение конструкции шасси в связи с увеличением взлетной массы
(основные стойки стали двухосными, что уменьшило нагрузки на плиту
ВПП); передняя стойка стала убираться назад, тормозные щитки перене-
сены вниз и установлены перед основными стойками шасси;
• измененную конструкцию нижней части фюзеляжа, где на катапультных
устройствах в полуутопленном положении размещено основное оружие
самолета - ракеты Р-33 большой дальности пуска; дополнительное воо-
ружение (ракеты класса "воздух - воздух" малой и средней дальности)
расположено под крылом;
• установку шестиствольной пушки ГШ-23-6 калибра 23 мм.
Самолет имеет принципиально новый комплекс оборудования, в состав
которого входит система управления вооружением (СУВ) "Заслон". Впервые
в мире установлен радиолокатор с фазированной антенной решеткой, обеспе-
чивающей одновременный обзор воздушного пространства в зоне ± 60° по
азимуту и углу места (сопровождение целей в зоне ±70°) в свободном про-
странстве и на фоне земли на дальностях до 200 км. Обеспечивается одновре-
менное сопровождение 10 целей и обстрел четырех из них. На последующих
модификациях увеличены дальность действия БРЛС, дальность пуска ракет,
число каналов РЛС по сопровождению и обстрелу целей; введены режимы
группового применения РЛС и вооружения.
В состав СУВ включены ракеты Р-33 с дальностью пуска более 100 км
(первые в стране ракеты класса "воздух-воздух" большой дальности), уби-
рающийся в фюзеляж теплопеленгатор обзора передней полусферы. Управле-
ние и обработку информации средствами СУВ выполняет цифровая вычисли-
тельная машина; внедрен крупноразмерный электронный индикатор тактиче-
ской обстановки в кабине летчика-оператора.
К числу важных новаций также относятся:
• система навигации с инерциальной системой на поплавковых гироскопах;
• цифровые вычислители в составе СУВ, САУ, системы навигации;
• радиотехническая система ближней навигации с режимом обмена коорди-
нат, обеспечивающим групповой полет самолетов и встречу с танкером;
• радиосистема дальней навигации, обеспечивающая точное определение
координат в длительных полетах на Крайнем Севере, где практически от-
сутствует сеть наземных РЛС и радиомаяков систем ближней навигации;
• аппаратура спутниковых навигационных систем (на последних сериях);
• обмен информацией:
• в группе самолетов МиГ-31, летящих, например, фронтом на расстоянии
до 600...800 км при автономных действиях с просмотром полосы до
1000 км, включая малые высоты;
138
• при управлении группой самолетов других типов, например МиГ-25 или
Су-27;
• с наземными средствами ПВО;
• с самолетами АК РЛДН.
МиГ-31 стал кузницей руководящих кадров. Первым главным конструк-
тором был Г. Е. Лозино-Лозинский, затем - К. К. Васильченко, А. А. Бело-
свет, Э. К. Кострубский.
Отличия самолетов МиГ-31Б и МиГ-31БС заключаются в расширенных
возможностях боевого применения, в составе вооружения, во введении сис-
темы дозаправки в воздухе, а также в реализации ряда мероприятий, повы-
шающих надежность и удобство эксплуатации.
МФИ
Особенностью этого самолета 5-го поколения (рис. 2.3.3) явилась его
многофункциональность. Он предназначен для решения следующих задач:
• перехвата при обеспечении высоких значений сверхзвуковых рубежей;
• ведения успешного воздушного боя, в том числе в групповых действиях и
при сложной радиотехнической обстановке;
• нанесения ударов по наземным и надводным целям, т. е. выполнения за-
дачи перехватчика, истребителя и ударного самолета.
Разработка многофункционального истребителя МФИ находится на ста-
дии испытаний. 29 февраля 2000 г. шеф-пилот ОКБ Герой России В. М. Гор-
бунов совершил первый вылет на этом самолете. Подтверждаются расчетные
данные и реализуется возможность дальнейшего продвижения по программе
летных испытаний.
Рис. 2.3.3. Многофункциональный истребитель проекта МФИ
139
2.3.3. Истребители "МиГ" для авиации ПВО
Практически все истребители МиГ (МиГ-1,-3,-9,-15,-17,-19,-21,-23,-25
и -29) применялись в авиации ПВО страны (см. табл. 2.3.4). В ряде случаев
(на базе МиГ-17, МиГ-19, МиГ-21 и МиГ-23) создавались специальные моди-
фикации, описание которых будет приведено ниже. Из числа первых следует
упомянуть:
• серийные реактивные истребители МиГ-9, МиГ-15, МиГ-15бис;
• два опытных варианта самолета МиГ-15 - СП-1 и СП-5 с бортовыми ра-
диолокационными станциями "Торий" (СП-1) и "Изумруд" (СП-5), кото-
рые располагались в верхней части воздухозаборника.
Самолеты с БРЛС "Торий", "Коршун" получили отрицательную оценку
во многом из-за сложности работы летчика с радиолокатором и малой надеж-
ности; "Изумруд" оценен более высоко и был с успехом позднее использован
на самолетах МиГ-17 и МиГ-19.
Семейство самолетов МиГ-17
В рамках работ по самолету созданы варианты с бортовыми радиоло-
каторами для авиации ПВО— МиГ-17Ф, МиГ-17П, МИГ-17ПФ,
МиГ-17ПФУ.
МиГ-17Ф (СП-2) использовал БРЛС "Коршун" (модификация РЛС "То-
рий"), имел одну пушку НР-23. Опытный самолет получил отрицательное за-
ключение из-за сложности работы с РЛС, ее низкой надежности, сложности
рулежки и взлета с подвесными топливными баками емкостью по 600 л.
МиГ-17П (СП-7) имел БРЛС "Изумруд" (РП-1) и был вооружен тремя
пушками HP калибра 23 мм. Самолет стал первым достаточно массовым ис-
требителем с БРЛС.
2.3.4. Истребитель МиГ-17ПФ
140
Основные характеристики истребителей
Таблица 2.3.4
Данные МиГ-15 МиГ-15 бис МиГ-17 ПФ МиГ-19П МиГ-21 Ф-13 МиГ-21 ПФМ МиГ-21 МФ МиГ-21 бис МиГ-21- 93 МиГ-23П МиГ-29 МиГ- 29СМТ
Год начала выпуска 1948 1950 1952 1954 1960 1964 1970 1971 1997 1977 1982 1998
Двигатель РД-45Ф ВК-1 ВК-1Ф АМ-9Б Р-11Ф-300 Р-11Ф2С- 300 Р-13-300 Р-25-300 Р-35-300 РД-33 РД-33
Тяга, кгс 2270 2700 3380 2x3250 5740 6175 6480 7100 13000 2x8300 2x8300
Взлетная масса, т 4,806 5,044 5,620 7,348 7,370 7,820 8,900 8,725 8,825 14,700 15,300 16,900
Максимальная скорость, км/ч 1031 1044 1123 1430 2175 2230 2230 2175 2500 2450 2400
Потолок, км 15,2 15,5 16,3 17,5 19 18,5 17,3 , 17,8 17,3 18,5 18 17,5
Дальность по- лета без ПТБ, км 1420 1330 1100 1474 1300 1300 1050 1210 1950 1500 2200
Ракетное воо- ружение: "воздух-воздух" - - - - 2хР-ЗС 2хР-ЗС Р-ЗС или Р-ЗР 2хРЗ или 4хК-60 2хР-27 илн 4хРВВ или 4хР-73 2хР-23 (Р-24) или 4хР-ЗС или бхР-60 2хР-27+ 4хР-73 или 6хР-73 6-8 шт. типа Р-27, РВВ-АЕ, Р-73
Пушки 1хН-37+ 2хНР-23 1хН-37 + 2хНС-23 1хН-37 + 2хНС-23 ЗхНР-ЗО lx НР-30 ГШ-23 jконтейнере ГШ-23 ГШ-23 ГШ-23 ГШ-23 ГШ-301 ГШ-301
РЛС - - РП-1 "Изумруд" - цд-зот (РП-21) РП-22 ("Сапфир-21") "Копье" "Сапфир- 23МЛ" Н019 "Жук-М"
Бортовой вы- числитель - - - - - - Ц-175 Аналоговый в составе СУВ Две Ц-100 в составе комплекса БЦВМ
КРУ - - - - "Лазурь" "Лазурь-М" "Лазурь-М" "Бирюза" "Бирюза" "Бирюза" "Бирюза"
Автопилот - - - - - КАП-2 АП-155 САУ-23ЕСН САУ-23 САУ-451 САУ-917
МиГ-17ПФ (СП-7Ф) отличался от МиГ-17П в основном установкой двига-
теля с форсажной камерой ВК-1Ф, что улучшило его динамические характе-
ристики (рис. 2.3.4). Самолет был запущен в массовую серию, в том числе в
Польше (1лт-5П) и Чехословакии (С-104).
МиГ-17ПФУ (СП-6) — переоборудование строевых самолетов МиГ-17ПФ
под новое вооружение с доработкой БРЛС. Самолет получил четыре управ-
ляемых ракеты РС-2УС (индекс опытных ракет К-5), пушечное вооружение
при этом демонтировалось.
Семейство самолетов МиГ-19
На базе первого в стране сверхзвукового самолета МиГ-19 (рис. 2.3.5)
для частей ПВО были созданы серийные модификации:
МиГ-19П — вариант с РЛС РП-1 и двумя пушками НР-30;
МиГ-19ПМ с РЛС "Изумруд-2", четырьмя ракетами К-5М. Под тем же на-
званием МиГ-19П (вариант СМ-3) строится самолет с более мощными двига-
телями Р-3-26 и измененным конусом воздухозаборника, что обеспечило уве-
личение скорости полета до 1930 км/ч и высоты полета до 18 км;
МиГ-19СВ - облегченный вариант МиГ-19С с новым высотным снаряже-
нием и форсированными двигателями АМ-9БФ и АМ-9БФ-2, которые обеспе-
чивали потолок свыше 20 км. Создание этой модификации вызывалось необ-
ходимостью перехвата высотных разведчиков типа U-2 и RB-57, совершав-
ших до сбития U-2 под Свердловском достаточно частые полеты над СССР.
Рис. 2.3.5. Истребитель МиГ-1911
142
Кроме того, были разработаны опытные самолеты:
СМ-12ПМ с двигателями Р-3-26, подвижным конусом воздухозаборника,
в котором размещалась РЛС ЦД-ЗО; вооружение - две ракеты РС-2У;
СМ-12ПМУ, отличавшиеся от СМ-12ПМ размещением под фюзеляжем
ракетного ускорителя РУ-013 с тягой 3 т (ЖРД); на этом же самолете прохо-
дила испытания опытная аппаратура передачи команд наведения "Горизонт",
новый ответчик госопознавания и радиовысотомер;
МиГ-19СУ - дальнейшее развитие СМ-12ПМУ с установкой РЛС "Изум-
руд" ("Алмаз" ЦД-ЗО). Достигнута высота полета до 24 км, скорость
1800 км/ч, построено 5 самолетов;
МиГ-19С (СМ-9/ЗТ) - самолет для отработки ракеты К-13 (Р-3);
СМ-11 — самолет для отработки инфракрасной аппаратуры "Ястреб".
Семейство самолетов МиГ-21
Самолеты МиГ-21 выпускались длительное время, создано большое их
количество (свыше 40 модификаций).
В качестве боевых самолетов для авиации ПВО могли использоваться спе-
циальные модификации (МиГ-21П, МиГ-21ПФ, МиГ-21ПФМ), имеющие ра-
кетное вооружение, БРЛС и аппаратуру командной линии наведения; общие
для ПВО и ВВС, такие, как МиГ-21С, МиГ-21СМ, МиГ-21МФ, МиГ-21МТ,
МиГ-21СМТ, МиГ-21бис, первая крупносерийная модификация с ракетным
вооружением МиГ-21Ф-13. В настоящее время ведутся работы по модерниза-
ции самолетов МиГ-21бис - МиГ-21-93, а также самолетов более ранних типов.
Характеристики ряда модификаций самолетов МиГ приведены в табл. 2.3.4.
Самолет МиГ-21Ф-13, рис. 2.3.6, начали серийно выпускать в 1960 г. (опыт-
ный самолет— в 1959 г.). Двигатель— Р-11Ф-300, вооружение— две ракеты
К-13 (Р-ЗС) с инфракрасными головками самонаведения. В носовом конусе
устанавливался радиолокационный дальномер СРД-5, сопряженный с оптиче-
ским прицелом АСП-5НД.
Рис. 2.3.6. Истребитель МиГ-21Ф-13
На самолеты МиГ-21П, МиГ-21ПФ, МиГ-21ПФМ при том же вооружении
(на МиГ-21ПФМ дополнительно реализована возможность подвески под фю-
143
зеляжем пушечного контейнера с пушкой ГШ-23) устанавливались: в носовом
конусе БРЛС ЦД-ЗОТ (РП-21), бортовая часть линии передачи команд наведе-
ния с земли "Лазурь" и одноканальный (по крену) автопилот КАП-2. Основное
отличие- силовая установка: на МиГ-21П- двигатель Р-ПФ-300, на
МиГ-21ПФ- более мощный Р-11Ф2-300 (форсажная тяга 6120 кг), а на
МиГ-21 ПФМ - двигатель Р-11Ф2С-300 с отбором воздуха для сдува погранич-
ного слоя и стартовые пороховые ускорители СПРД-99 с тягой 2x2500 кг, что
обеспечило сокращение длины разбега до 360...430 м, а пробега с учетом тор-
можения колес, с выпуском тормозного парашюта и использованием системы
сдува пограничного слоя - до 420 ... 500 м. Самолеты данных типов выпуска-
лись на заводах в Москве, Нижнем Новгороде, а также в Польше и Чехосло-
вакии.
На самолетах МиГ-21С, МиГ-21СМ, МиГ-21МФ, МиГ-21МТ,
МиГ-21СМТ внедрена усовершенствованная БРЛС "Сапфир-21" (РП-22), ко-
торая, как правило, поставлялась совместно с трехканальным автопилотом
АП-155 и модернизированной бортовой аппаратурой наведения "Лазурь-М".
Если МиГ-21С имел еще пушечный контейнер, то, начиная с МиГ-21СМ, на
самолете размещалась встроенная пушка. Число управляемых ракет возросло
до четырех, расширилась их номенклатура за счет внедрения Р-ЗР (К-13Р-
вариант с полуактивной радиолокационной головкой самонаведения), а затем
в строю, по бюллетеням самолеты были доработаны под применение ракет
Р-60 (Р-60М).
Если самолет МиГ-21 С имел двигатель Р-11Ф2 С-300 с форсажной тягой
6175 кг, то самолеты с МиГ-21 СМ получили двигатель Р-13 с тягой 6480 кг.
На самолетах МиГ-21СМТ увеличился запас внутреннего топлива за счет
размещения его в гаргроте.
Последними серийными самолетами явились МиГ-21бис (рис. 2.3.6) с
двигателем Р-25-300, ракетами Р-60 (Р-60М). В настоящее время созданы мо-
дернизированные самолеты МиГ-21-93 (на базе ранее выпущенных самолетов
МиГ-21бис), имеющие современную систему управления вооружением с
БРЛС "Копье", современный комплекс бортового оборудования и вооруже-
ние, включающее ракеты класса "воздух-воздух" средней дальности (Р-27Р,
Р-27Т, РВВ-АЕ) и малой дальности пуска Р-73.
Самолет МиГ-23
В принципе все серийные модификации этих самолетов-истребителей
могли использоваться в авиации ПВО страны: МиГ-23С, МиГ-23М,
МиГ-23МЛ, МиГ-23МЛД; одна из серийных модификаций- МиГ-23П
(рис. 2.3.7) - создавалась специально для авиации ПВО. Могли с успехом ис-
пользоваться и последние опытные модификации (23-47) и (23-57) с повы-
шенной маневренностью, ракетами Р-73, с наиболее мощными средствами
радиоэлектронного противодействия; варианты со снижением заметности в
радиолокационном диапазоне. К этому времени уже началось серийное про-
изводство МиГ-29. За длительное время выпуска самолетов сменилось не-
сколько типов двигателей, РЛС, менялся состав вооружения (табл. 2.3.5).
144
Данные по модификациям истребителя МиГ-23
Таблица 2.3.5
Модификация Двигатель РЛС Вооружение
МиГ-23С Р-27Ф-300 "Сапфир-21" 4хР-ЗС (Р-ЗР), ГШ-23
МиГ-23М Р-29-300 "Сапфир-23 ДШ" 4хР-23(Р-24) или 4хР-3, ГШ-23
МиГ-23МЛ Р-35-300 "Сапфир-23МЛ" 4хР-23 (Р-24) или 4хР-3, или Р-60, ГШ-23
МиГ-23МЛД Р-35-300 "Сапфир- 23 МЛД" Р-24Р, Р-24Т, Р-60, Р-73
Характеристики МиГ-23П даны в табл. 2.3.4.
Самолеты МиГ-23 имели:
• крыло изменяемой геометрии, что обеспечивало рост дальности и про-
должительности полета, увеличение приборной скорости, снижение
уровня перегрузок от турбулентности атмосферы;
• РЛС типа "Сапфир-23", обеспечивающую обнаружение целей как на фоне
земли, так и в свободном пространстве;
• теплопеленгатор обнаружения воздушных целей (ТП-23);
• средства радиоэлектронного противодействия (РЭП);
• высокий уровень автоматизации полета;
• совмещение на индикаторе лобового стекла (ИЛС) сигналов о воздушной
обстановке от РЛС или теплопеленгатора и параметров, необходимых для
управления самолетом;
• достаточно эффективные ракеты средней дальности пуска (впервые на
легком самолете) Р-23 и Р-24 с полуактивными радиолокационными
(Р-23Р, Р-24Р) и тепловыми (Р-23Т, Р-24Т) головками самонаведения.
Рис.2.3.7. Истребитель МиГ-23П
10 - 4094
145
У самолетов МиГ-23 в авиации ПВО оказался наименьший часовой расход
топлива и незначительные эксплуатационные расходы по сравнению с такими
истребителями-перехватчиками, как МиГ-25, МиГ-31, Су-27, что в условиях
перестройки стало фактором, определившим их долгую жизнь в авиации ПВО.
Самолет МиГ-29
Истребители МиГ-29 проектировались как универсальные для использо-
вания в ВВС и для ПВО страны.
На вооружении ВВС России состоят истребители МиГ-29 и МиГ-29С
(рис. 2.3.8), построены опытные партии самолетов МиГ-29СМТ, а также ряд
модификаций для флота и экспорта, опытные самолеты с базированием на
укороченных ВПП (взлет с трамплина, посадка на аэрофинишер), со сниже-
нием уровня заметности.
Рис. 2.3.8. Истребитель МиГ-29
Под индексом МиГ-29 выпускались две модификации, конструктивно от-
личающиеся друг от друга (заводские индексы 9.12 и 9.13). Самолет 9.13 мог
нести дополнительно или два подкрыльевых подвесных топливных бака, или
увеличенную до 3 т бомбовую нагрузку. В табл. 2.3.4 даны характеристики
самолета 9.12.
Самолеты МиГ-29С отличаются от МиГ-29 (на базе 9.13) в основном мо-
дифицированной РЛС, обеспечивающей применение ракет средней дальности
с активной радиолокационной головкой самонаведения Р-77 (ее экспортный
вариант - РВВ-АЕ) с возможностью подвески до шести ракет на самолет, а
также одновременный обстрел двух целей этими ракетами и улучшение по-
мехозащищенности станции.
Самолет МиГ-29М обладает значительными конструктивными отличия-
ми и имеет:
• увеличенный запас внутреннего топлива;
• более мощные двигатели;
• систему дистанционного управления;
146
• новую приборную доску с двумя дисплеями;
• полностью новый комплекс оборудования с многофункциональной РЛС
Н-010, обеспечивающей более высокие параметры работы как по воз-
душным целям, так и в режиме "воздух-поверхность";
• более совершенную оптико-локационную станцию, обеспечивающую
большие дальности обнаружения и работу по целям в переднюю полу-
сферу;
• новый комплекс радиоэлектронного противодействия;
• новый комплекс связи.
Увеличено число точек подвески до девяти, еще на 1 т возросла величина
полезной нагрузки, в состав вооружения введены ракеты класса "воздух-
поверхность" и корректируемые бомбы.
К сожалению, экономические трудности не позволили полностью завер-
шить летные испытания и развернуть крупномасштабное производство, хотя
все заявленные характеристики были получены и зафиксированы в положи-
тельной оценке акта предварительных Государственных испытаний.
В рамках темы по МиГ-29СМТ получены результаты, во многом превос-
ходящие достижения МиГ-29М, использована новейшая элементная база по
вычислительной технике, архитектура комплекса с мультиплексными линия-
ми связи, применяются полноцветные, крупноразмерные индикаторы на жид-
ких кристаллах; увеличен запас внутреннего топлива, реализована возмож-
ность дозаправки в воздухе с использованием убирающейся штанги и др.
Важнейшей особенностью является возможность внедрения достижений на
ранее выпущенных самолетах; ведутся работы по дальнейшему развитию
МиГ-29СМТ, по результатам которых могут значительно возрасти возможно-
сти как перехватчика, так и многофункционального истребителя.
Линия универсальности самолетов закладывается в основу ведущих работ
по проектированию новых самолетов, над созданием которых продолжает ра-
боту АНПК "МиГ".
Специализированные самолеты
К числу специализированных самолетов, созданных или разрабатывае-
мых АНПК "МиГ", можно отнести:
• учебно-боевые самолеты, созданные на базе боевых самолетов МиГ-9,
МиГ-15, МиГ-21, МиГ-23, МиГ-25, МиГ-29 (в ряде случаев создавалось
несколько модификаций учебно-боевых самолетов, например: МиГ-21 У,
МиГ-21 УС, МиГ-21 УМ, МиГ-21У-99);
• учебно-тренировочный самолет МиГ-AT, который может использоваться
также для разведки погоды, при поисковых операциях и т.д.;
• мишени на базе выработавших свой летный ресурс самолетов МиГ-15,
МиГ-17, МиГ-21;
• самолет МиГ-17 с линзами Люнеберга для оценки дальности действия на-
земных и бортовых РЛС;
• самолеты-ретрансляторы.
147
ю*
2.3.4. ОКБ им. А.И. Микояна
модернизирует свои истребители
АНПК "МиГ" имеет достаточно большой опыт глубокой модернизации
самолетов. Так, после перелета в 1979 г. в Японию новейшего для того времени
перехватчика МиГ-25П было принято решение о разработке МиГ-25ПД и мо-
дернизации на его базе всего ранее выпущенного парка; по заказу ВВС модер-
низировали практически все самолеты МиГ-25. Ныне завершается работа по
модернизации истребителя МиГ-21бис в МиГ-21-93, обеспечивающая сущест-
венный рост боевых возможностей при относительно небольших затратах.
Работа по модернизации прежде всего массовых боевых самолетов, состо-
ящих на вооружении многих стран, вызвана следующими обстоятельствами:
• по большинству летных характеристик эти машины не уступают истреби-
телям 4-го поколения;
• сроки службы могут быть продлены, как минимум, до 2010—2015 гг.;
• самолеты освоены летным и техническим составом;
• полностью имеются необходимые системы логистики (системы наземной
поддержки);
• по боевой эффективности модернизированные самолеты сравнимы с са-
молетами следующего поколения;
• возможно обеспечение многофункционального применения самолета.
Подходы к модернизации самолетов
Выбор рационального варианта модернизации оказался достаточно сложным
по причине того, что самолеты МиГ выпускались в течение длительного времени
в качестве истребителей, перехватчиков, учебно-боевых самолетов, а некото-
рые — еще и ударных самолетов. В каждом семействе несколько раз менялись
двигатели, радиолокаторы, конструкция планера, объем внутреннего топлива.
АНПК "МиГ" сформировал новую комплексную стратегию модерниза-
ции, опирающуюся на следующие принципы:
1. Использование пакетного метода модернизации, предполагающего: из-
менение архитектуры бортового комплекса и информационно-управляющего
поля; размещение новых или модернизированных РЛС, оптико-локационных
систем и вооружения; доработку по самолету и самолетным системам; уста-
новку новых систем бортовой авионики; установку систем логистики.
2. Выбор базовых вариантов модернизации. Для истребителей предлага-
ются два варианта: с максимальной боевой эффективностью и с минимальной
стоимостью при обеспечении применения новых типов ракет класса "воздух-
воздух".
3. Одновременное проведение комплекса работ по модернизации авиаци-
онной техники, мероприятий по профилактике и ремонту самолетов, продле-
нию срока службы и ресурса, а также создание совместных предприятий по
обеспечению эксплуатации, производства и поставок запасных частей и рас-
ходных материалов. 4
Пакетный метод модернизации самолетов МиГ включает ряд мероприя-
тий по последовательному совершенствованию истребителей, оборудования,
эксплуатации.
148
1-й пакет:
• изменение архитектуры бортового комплекса, в том числе установка бор-
товых автоматизированных систем управления, многофункциональных
дисплеев, цифровых вычислителей, мультиплексных каналов информа-
ционного обмена;
• обеспечение применения управляемого оружия - Р-27Р(ЭР), Р-27Т(ЭТ),
РВВ-АЕ, Р-73, Х-31А, Х-31П, Х-25МП, Х-29Т, Х-25МТ, КАБ-500КР,
КАБ-500Л, Х-29Л, Х-25МЛ;
• размещение новых и модернизированных РЛС, информационных систем
ИНС - СНС, цифровых СВС, оптико-электронных прицелов, авиацион-
ных подвесных контейнеров с аппаратурой, новых пусковых и ката-
пультных установок, адаптеров;
• доработка планера, систем управления оружием.
2-й пакет:
• продление срока службы и ресурса;
• установка систем дозаправки в воздухе и обеспечения встречи с танкером;
• обеспечение снижения заметности в РЛ-диапазоне;
• увеличение боевой живучести;
• доработка систем энергоснабжения, охлаждения и др.
3-й пакет:
• установка средств РЭП (станций предупреждения об облучении, станций
активных помех, систем выброса помех, дополнительных сенсоров); но-
вых средств радионавигации, госопознавания и ответчиков УВД, аварий-
ных самописцев, радиомаяков;
• доработка планера.
4-й пакет:
• создание центров планирования, анализа, радиоэлектронной борьбы, раз-
ведки; совместных предприятий по обеспечению эксплуатации;
• разработка технической позиции по подготовке оружия;
• изготовление дополнительного оборудования.
Ниже приводятся краткие характеристики некоторых из базовых вариан-
тов модернизации самолетов МиГ.
МиГ-21-93. Этот вариант предусматривает установку на МиГ-21бис новой
системы управления вооружением на базе многофункциональной РЛС "Копье".
БРЛС "Копье" имеет следующие режимы.
При работе по воздушным целям:
• обнаружение и сопровождение целей в свободном пространстве и на фо-
не земли (моря) с выдачей целеуказания на ракеты с тепловыми и радио-
локационными головками самонаведения и СПВ;
• сопровождение в режиме обзора нескольких целей и атака ракетами;
• режим быстрого поиска - ближний бой.
При работе по поверхности:
• картографирование действительным лучом (низкое разрешение);
• картографирование в режиме синтезированной апертуры (высокое разре-
шение);
149
• укрупнение масштаба выбранного участка карты;
• измерение координат цели, выбранной на земле (море).
Самолет вооружается ракетами класса "воздух-воздух" средней дальности
Р-27, РВВ-АЕ и малой дальности Р-73; для действий по наземным и надвод-
ным целям - ракетами Х-25М, корректируемыми бомбами КАБ-500КР. На
борту устанавливаются: индикатор на лобовом стекле, нашлемная система
целеуказания, многофункциональные дисплеи, инерциально-спутниковая на-
вигационная система, цифровая система воздушных сигналов, средства ра-
диоэлектронного противодействия, модернизируемые системы энергоснаб-
жения, регистрации и др.
МиГ-21-98-1. В этом варианте на МиГ-21М улучшен обзор летчику и ус-
танавливаются бортовая автоматизированная система управления и диалога с
экипажем верхнего уровня (БАСУ) и малогабаритная РЛС с уменьшенной по-
требляемой мощностью. Состав вооружения и остального оборудования бли-
зок к МиГ-21-93. Доработки коробки приводов и установки новых генерато-
ров не требуется.
МиГ-23-98. Является базовым вариантом модернизации всех типов ис-
требителей МиГ-23, предполагающим установку бортовой автоматизирован-
ной системы управления, многофункциональной РЛС, модернизированных
ИНС и СВС, новых средств радионавигации и РЭП. Вооружен ракетами клас-
са "воздух-воздух" семейства Р-27, РВВ-АЕ, Р-73 (при сохранении ракет с
ИК-головками самонаведения Р-24Т, Р-23Т, Р-60); управляемым оружием по
наземным целям, кораблям и работающим РЛС: КАБ-500КР, Х-31А/П,
Х-29Т/ТД, а также ракетами семейства Х-29М.
Один из вариантов модернизации (МиГ-23-98-1) предусматривает замену
БРЛС "Сапфир-23" на БРЛС "Жук-М" (разработчик - ОАО "Фазотрон-НИИР").
В дополнение к основным режимам работы БРЛС "Сапфир-23" новая станция
"Жук-М" располагает следующими возможностями. В режиме "воздух-воздух":
• дальномерно-поисковый режим и сопровождение;
• сопровождение на "проходе" восьми целей с одновременной атакой двух
из них;
• технические характеристики: дальность обнаружения цели типа истреби-
теля - 90 км в ППС и 40 км в ЗПС; углы сопровождения ± 60° в горизон-
тальной и вертикальной плоскостях; средняя мощность передатчика бо-
лее 1 кВт; масса 100 кг.
В режиме "воздух - поверхность":
• картографирование при поиске наземной или морской цели методами ре-
ального луча, доплеровского обужения луча, синтезирования апертуры
антенны;
• обнаружение движущихся наземных (морских) целей;
• измерение дальности до земли.
По всем самолетам МиГ-23 при модернизации проводится также ком-
плекс мероприятий, включающий снижение заметности, установку системы
дозаправки в воздухе, новой авионики, большого набора аппаратурных кон-
тейнеров, обеспечивающих расширение номенклатуры оружия.
Модернизация МиГ-31. Если самолеты МиГ-31 являются специализиро-
ванными дальними перехватчиками, то модернизированный МиГ-31 стано-
150
вится многофункциональным истребителем, способным нести высокоточное
оружие для поражения воздушных и наземных целей. Бортовая система
управления вооружением (СУВ) "Заслон" и входящая в ее состав БРЛС дора-
ботаны для обеспечения режимов "воздух-поверхность".
Помимо управляемых ракет класса "воздух-воздух" большой дальности
Р-37 модификация МиГ-31 оснащена ракетами средней дальности РВВ-АЕ,
размещаемыми на подкрыльевых узлах, и ракетами ближнего воздушного боя
Р-73; сохранены в составе вооружения и ракеты Р-40. Ударное вооружение
самолета включает ракеты Х-31П и Х-58, предназначенные для уничтожения
радиолокационных станций системы ПВО противника. Могут быть также ис-
пользованы противокорабельные ракеты Х-31А с активной ГСН, тяжелые
корректируемые бомбы КАБ-1500Л/ТВ или КАБ-500КР. Максимальная масса
бомбовой нагрузки достигает 9000 кг (шесть бомб ФАБ-1500).
Бортовое оборудование модернизированного самолета МиГ-31 обеспечи-
вает возможность эффективного взаимодействия с зенитными ракетными
комплексами ПВО. Кроме борьбы с воздушными и наземными целями этот
самолет может использоваться и в качестве воздушного командного пункта.
Отдельно необходимо отметить рост боевой эффективности модерни-
зируемых самолетов. Результативность модернизации характеризуется по-
вышением интегрального показателя - коэффициента боевого потенциала
при действиях по воздушным и наземным целям и суммарно для истребите-
ля (рис. 2.3.9).
Рис. 2.3.9. Оценка боевой эффективности модернизации
по воздушным целям
по наземным целям
суммарная
Эффективность модернизированных самолетов МиГ-21-93 и МиГ-21-98
по отношению к прототипу МиГ-21бис по оценкам АНПК "МиГ" выше в
5-7 раз при работе по воздушным целям и в 2,5-3 раза при действиях по на-
земным целям. За счет модернизации БРЭО и вооружения эффективность мо-
дернизированного самолета МиГ-31 по сравнению с МиГ-31 возросла в
2,5 раза. Особо важно увеличение боевого потенциала при ведении дальнего
ракетного боя, которое обеспечивается характеристиками новых РЛС и раке-
тами РВВ-АЕ. В этом случае по своим боевым возможностям комплексы
МиГ-21-93, МиГ-21-98, МиГ-23-98 близки к F-16C и "Мираж"2000-5. Исполь-
зование НСЦ, РЛС в режиме "Вертикаль", ракет Р-73 и средств РЭП значи-
тельно повышает возможности истребителя в ближнем маневренном бою.
Новые прицельные системы и управляемое оружие, более эффективное
неуправляемое оружие (в том числе разовые бомбовые кассеты с самонаводя-
щимися элементами), повышение точности навигации и прицеливания приво-
дят к заметному росту боевого потенциала при действиях по наземным целям.
151
МиГ-29СМТ - новая модификация истребителя МиГ-29
Самолет МиГ-29 разрабатывался в соответствии с концепцией ВВС СССР
70-80-х годов, предусматривающей создание истребителей двух типов (лег-
кого и тяжелого) в количественном соотношении от 3 : 1 до 4 : 1 в пользу лег-
кого. При идентичности требований к маневренным характеристикам, но-
менклатуре оружия, составу и функциям бортовой авионики к легкому само-
лету предъявлялись более умеренные требования по дальности и продол-
жительности полета в сравнении с тяжелым и более дорогим истребителем.
Разработанный в соответствии с этой концепцией МиГ-29 построен в ко-
личестве свыше 1600 экземпляров и эксплуатируется в 25 странах. По уровню
высотно-скоростных, посадочных, маневренных характеристик, степени на-
дежности и безопасности полетов самолет МиГ-29 не уступает проходящим
летные испытания зарубежным самолетам-истребителям 5-го поколения, а по
ряду параметров, например тяговооруженности на режимах воздушного боя,
их превосходит.
Учет значительных изменений в военно-политической обстановке, эко-
номических возможностей стран - эксплуатантов самолетов и потенциальных
покупателей, интересов ВВС России, анализ многолетнего опыта эксплуата-
ции, учений ВВС показывает возрастающую значимость модернизации само-
летов. При этом как модернизируемые, так и вновь поставляемые самолеты
должны иметь:
• значительно более высокие характеристики по дальности и продолжитель-
ности полета, особенно при использовании только внутреннего топлива;
• многофункциональную РЛС;
• современное управляемое оружие, включая ракеты класса "воздух-
воздух" средней дальности с активной радиолокационной головкой само-
наведения и широкий спектр высокоточного оружия для действий по на-
земным, морским и радиоизлучающим целям;
• открытую архитектуру построения комплекса БРЭО, увеличение возмож-
ностей по диалогу с экипажем и взаимодействия с внешними информаци-
онными системами, возможность внедрения систем с искусственным ин-
теллектом;
• комплекс радиоэлектронного противодействия;
• совместимость систем авионики, их соответствие стандартам инфра-
структуры (радионавигация, связь, госопознавание, ввод маршрута, дан-
ные анализа полета и т. д.);
• резко возросшие сроки службы и ресурс по двигателю, планеру и основ-
ным агрегатам с удешевлением и упрощением эксплуатации;
• возможность подвески аппаратурных контейнеров;
• расширение функций и условий боевого применения.
В течение ряда лет АНПК "МиГ" проводил техническую политику, кото-
рая заключалась в создании последовательного ряда модификаций: МиГ-29С,
МиГ-29СД, МиГ-29СМ с улучшением характеристик РЛС, подвеской ракет
РВВ-АЕ, Х-29Т, применением корректируемых бомб КАБ-500КР, увеличени-
ем бомбовой нагрузки до 4 т, внедрением подкрыльевых подвесных топлив-
ных баков, дозаправкой в воздухе, повышением ресурса, представляющих
развитие работ по коренной модернизации - МиГ-29М (МиГ-33), которая, в
152
свою очередь, явилась базовой для ряда построенных (МиГ-29К) и проекти-
руемых модификаций.
Использование идеологии МиГ-29М, опыта испытаний, современных
достижений в области систем бортовой авионики и вычислительной техники
позволило создать новую концепцию, сочетающую:
• получение результатов по дальности полета, возможностям РЛС, интерье-
ру кабины, бортовой авионики, превосходящих характеристики МиГ-29М;
• возможность модернизации ранее выпущенных самолетов, удешевление
процесса производства и подготовки серийного выпуска.
На первом этапе создана базовая модификация, обеспечивающая решение
следующих основных задач:
• рост дальности и, соответственно, продолжительности полета;
• создание открытой архитектуры бортового комплекса, нового информа-
ционно-управляющего поля кабины;
• реализация многофункциональности РЛС;
• применение новых видов управляемого и неуправляемого оружия;
• снижение эксплуатационных расходов.
На следующих этапах модернизации рассматриваются направления:
• совершенствования двигателя с увеличением стендовой форсажной тяги,
с управлением вектора тяги, с улучшением экономичности;
• использования новых консолей крыльев с четырьмя точками подвески
оружия на каждой, с размещением дополнительного количества топлива
и повышением их несущих свойств;
• внедрения новых видов оружия и более совершенной РЛС нового поко-
ления с дальностью обнаружения целей типа истребитель 130... 150 км;
• дальнейшего развития систем авионики.
В целях ускорения работ был создан ряд опытных самолетов семейства
МиГ-29 для отработки новой топливной системы, информационно-управляю-
щего поля, режимов "воздух-поверхность" БРЛС.
Самолет МиГ-29СМТ (рис. 2.3.10) демонстрировался на статической сто-
янке в 1997 г. во время Мосаэрошоу МАКС-97, а во время выставки 1LA-98 в
Рис. 2.3.10. Многофункциональный истребитель МиГ-29СМТ
153
Берлине - на статической стоянке и в воздухе. Презентационный полет истре-
бителя МиГ-29СМТ (производственный индекс "9-17") в апреле 1998 г. явил-
ся началом совместных испытаний. Ниже представлены основные данные и
возможности этого самолета.
Рост дальности полета обеспечен за счет введения накладных баков ем-
костью 1880 л в гроте. Самолет может также нести три подвесных топливных
бака (ПТБ)- подфюзеляжный емкостью 1500 л и два под крылом на 1-й,
2-й точках подвески по 1150 л и иметь съемную штангу дозаправки топливом
в воздухе. В результате дальность полета выросла до 2200 км (без подвесных
топливных баков) и до 6500 км с подвесными баками и однократной доза-
правкой. Устраняется главная претензия к МиГ-29 - недостаточная дальность
действия. Становится возможным ведение воздушного боя на удалении
1550 км, а поражение наземных целей - свыше 1100 км. АНПК "МиГ" про-
должает работы по дальнейшему наращиванию дальности за счет улучшения
аэродинамики, размещения дополнительного топлива, роста емкости подвес-
ных топливных баков, повышения экономичности двигателя.
Новая архитектура и интерьер кабины. Для самолетов-истребителей
МиГ-29 была характерна структура специального бортового оборудования,
состоящая из двух комплексов: радиолокационного и оптико-электронного
прицельно-навигационного. В составе комплексов имеются ЦВМ, связанные
друг с другом. В последних модификациях появились дополнительные циф-
ровые вычислители в системах навигации, радиопротиводействия, управле-
ния оружием; происходила замена основных штатных ЦВМ на более совре-
менные.
Архитектура комплекса бортового оборудования МиГ-29СМТ основана
на использовании:
• центральной вычислительной системы верхнего уровня, обеспечивающей
диалог с экипажем;
• мультиплексного канала обмена информацией по стандарту ГОСТ
26765.52.87, соответствующему MIL-1553B, передачи телевизионной ин-
формации по стандарту ГОСТ-7849-79, соответствующему STANAG-3910;
• двух крупногабаритных полноцветных жидкокристаллических индикато-
ров, многофункционального пульта с устройством ввода-вывода инфор-
мации, в том числе картографической с помощью флеш-карт;
• программной совместимости всех бортовых вычислительных средств с
РС-компьютерами;
• видеорегистрации при решении широкого круга задач;
• концепции пилотирования без снятия рук с органов управления, извест-
ной на Западе как принцип НОТ AS.
Для самолета МиГ-29СМТ разработано новое информационно-управ-
ляющее поле кабины. Его основу составляют два многофункциональных ин-
дикатора; на них выводится прицельно-пилотажная и навигационная инфор-
мация, а также данные о работе бортовых систем. На боковых панелях каби-
ны размещены два многофункциональных пульта управления, один из кото-
рых используется для решения задач боевого применения, а другой
154
(с буквенно-цифровой клавиатурой) - задач навигации и управления средст-
вами связи. В центральной части приборной доски помещен блок традицион-
ных аналоговых пилотажных приборов. Информационно-управляющее поле
кабины включает также доработанные органы управления на РУДе и РУСе
для реализации принципа пилотирования без снятия рук, индикатор на лобо-
вом стекле и нашлемную систему целеуказания. Обмен информацией осуще-
ствляется по стандарту MIL-STD-1553B.
РЛС "Жук-М" является дальнейшим развитием РЛС Н-010 "Жук". Стан-
ция может сопровождать несколько воздушных целей и обеспечивать одно-
временный обстрел ракетами двух из них. Основное отличие — в увеличении
углов обзора по азимуту и наличии режимов "воздух-поверхность":
• обзора поверхности реальным лучом;
• обзора местности в режиме доплеровского обужения луча;
• обзора местности в режиме синтезированного антенного раскрыва;
• селекции движущихся целей;
• работы по морским целям, включая целеуказание и расчет зон возможных
атак ракет класса "воздух-корабль" Х-31А и Х-35.
Функции, обеспечиваемые БРЛС "Жук-М" со щелевой антенной решет-
кой в режимах "воздух-воздух", включают:
• обнаружение воздушных целей на встречных курсах на дальностях до
130 км;
• селекцию по скорости и по дальности;
• сопровождение на проходе нескольких целей (до 10 целей);
• ближний бой, в том числе поиск на ИЛС по углу места и азимуту;
• директорное управление при атаке нескольких целей.
Проводятся работы над дальнейшим повышением возможностей станции,
например по увеличению дальности обнаружения воздушных целей. В радио-
локационном прицельном комплексе РЛПК-29 вычислители серии Ц-100 за-
менены на современные разработки. В дальнейшем планируется установить
БРЛС с фазированной антенной решеткой.
Вооружение. На самолете МиГ-29СМТ помимо арсенала, реализованного
на последней версии МиГ-29СМ, могут быть использованы следующие воз-
можности (рис. 2.3.11):
• подвеска ракет Р-27 на 3-й, 4-й точках и подвесных топливных баков на
1 -й, 2-й точках;
• применение ракет класса "воздух-корабль" Х-31А с дальностью пуска до
70 км и Х-35 с дальностью пуска до 130 км;
• применение ракет класса "воздух-РЛС" Х-31П с дальностью пуска до
110 км;
• применение ракет, корректируемых бомб и снарядов с лазерными голов-
ками самонаведения Х-29Л, Х-25МЛ, КАБ-500Л, С-1ЗЛ (должен быть ус-
тановлен оптико-электронный контейнер, решающий, кроме того, задачи
круглосуточного обнаружения, распознавания и атаки малоразмерных
целей неуправляемым оружием и навигации);
155
Рис. 2.3.11. Вооружение самолета МиГ-29СМТ
• увеличение боевой нагрузки до 4,5 т с применением новых типов бомб, в
том числе калибра 1500 кг, и неуправляемых снарядов.
В состав подвесного вооружения МиГ-29СМТ включены новые ракеты
класса "воздух-воздух" средней дальности РВВ-АЕ, серийно выпускаемые в
России. Прорабатываются вопросы наращивания числа подвешиваемых ра-
кет, предусмотрена адаптация борта к перспективным российским разработ-
кам, в том числе ракет класса "воздух-воздух" большей дальности.
Эксплуатация. Значительное снижение стоимости эксплуатации обеспе-
чивается:
• переходом на эксплуатацию по состоянию с отказом от дорогостоящих
капитальных ремонтов;
• внедрением модульности в конструкцию двигателя с возможностью за-
мены модулей в условиях строевых частей;
• совместимостью с концепцией логистики и инфраструктуры стран-
заказчиков самолета;
• внедрением новых технологий эксплуатации, оптимизацией наборов зап-
частей и расходных материалов.
Работы по дальнейшему росту ресурса, календарных сроков службы, экс-
плуатационных характеристик продолжаются.
Кроме перечисленного возможны:
• поставка самолета со сниженным более чем на порядок уровнем радиоло-
кационной заметности в ППС, что сокращает дальность обнаружения са-
молета МиГ-29СМТ в два раза;
156
• усиление средств защиты от ракет с ИК-головками самонаведения;
• установка съемной брони кабины пилота;
• подвеска контейнеров с оптико-электронными прицельно-навигацион-
ными системами круглосуточного действия и широкодиапазонной стан-
цией помех.
В дальнейшем развитии предусматривается размещение на борту
МиГ-29СМТ комплекса средств радиоэлектронного противодействия в со-
ставе:
• системы предупреждения об облучении расширенного диапазона, в том
числе с функциями целеуказания противорадиолокационным ракетам
(СПО-29);
• широкодиапазонной станции активных радиопомех повышенной эффек-
тивности (в контейнере) (МСП-29);
• системы отстрела ложных тепловых целей, дипольных отражателей и од-
норазовых станций помех с автоматическим управлением отстрелом СПО
или летчиком;
• детекторов обнаружения атакующих ракет;
• аппаратуры управления и целеуказания ГСН противорадиолокационных
ракет.
Реализация мероприятий по первому этапу программы МиГ-29СМТ
обеспечивает (при незначительном росте стоимости самолета) существенное
снижение стоимости эксплуатации и резкий рост показателей по критерию
"эффективность-стоимость" (рис. 2.3.12).
Рис.2.3.12. Показатели стоимости и эффективности МиГ-29СМТ
Истребитель завоевания господства в воздухе МиГ-29 превратился в мно-
гофункциональный боевой самолет, способный эффективно решать и истре-
бительные, и ударные задачи. Он может быть разведчиком, истребителем-
перехватчиком, штурмовиком, командным пунктом. Решение разведыватель-
ных задач выполняется при использовании штатных систем оборудования за
счет подвесок контейнеров с разведывательной аппаратурой и применения в
качестве носителя или ретранслятора данных дистанционно пилотируемых
157
летательных аппаратов. На базе самолета МиГ-29СМТ возможно создание
многофункционального самолета корабельного базирования.
Создание самолета МиГ-29СМТ повысило интенсивность работ и по мо-
дернизации учебно-боевого самолета МиГ-29УБ. На модернизированном са-
молете МиГ-29УБТ внедряется новая архитектура бортового комплекса и ин-
терьер кабины, идентичные МиГ-29СМТ; устанавливается новая многофунк-
циональная РЛС "Оса" с ФАР; кардинально расширяется арсенал управляемого
оружия. Наличие второго члена экипажа при решении ряда задач, например
обнаружения и группового применения по малоразмерным наземным целям
при использовании оптико-электронного контейнера в режиме узкополосного
(~1 °) поля зрения, а также наведения ракет с телевизионно-командным наведе-
нием, значительно повышает эффективность боевых действий.
Летно-технические характеристики МиГ-29СМТ
Экипаж, чел.................................... 1
Силовая установка............................... 2 х РД-33
Тяга лвигателя взлетная, кгс................... 8300
Взлетная масса, кг:
нормальная..................................... 16 900
максимальная ................................ 22 400
Масса боевой нагрузки максимальная, кг............ 4500
Запас топлива внутренний, кг ..................... 4775
Дальность полета, км:
без ПТБ ........................................ 2200
с одним ПТБ .................................... 2800
с тремя ПТБ..................................... 3500
Практический потолок, км........................... 17,7
Скорость максимальная, км/ч ...................... 2400
Тяговооруженность (Н=0, М=1)................... 1,5
Скороподъемность, м/с .............................. 330
Перегрузка максимальная.............................. 9
Количество ракет класса "воздух - воздух"............ 6
Некоторые итоги и перспективы
Основными вехами творческого труда коллектива ОКБ им. А.И. Микояна
за почти 60 лет его истории стали массовые истребители авиации ПВО стра-
ны. Среди них необходимо отметить:
МиГ-17П, МиГ-17ПФ, МиГ-17ПФМ - первые массовые одноместные ис-
требители с бортовой РЛС, вооруженные управляемыми ракетами класса
" воздух-воздух";
МиГ-19П и его модификации - первые сверхзвуковые перехватчики
большой высотности, с БРЛС, с управляемым оружием. На них получен пер-
вый опыт работы и обоснована необходимость систем автоматизированного
наведения на цель;
МиГ-21 и МиГ-23 (созданы специализированные варианты для ПВО, кро-
ме того, обеспечена возможность всепогодного круглосуточного перехвата
истребителями ВВС). Для этих самолетов разработаны бортовые комплексы,
включающие БРЛС, теплопеленгатор (на МиГ-23), вычислительное устройст-
во, аппаратуру приема команд наведения, автопилот и управляемые ракеты с
158
радиолокационными и инфракрасными головками самонаведения. Обеспече-
но применение нескольких типов ракет на борту носителя. Самолет МиГ-23
впервые позволил обнаруживать и атаковать цели на фоне земли; он получил
ракеты средней дальности;
МиГ-25 и его модификации — первый массовый перехватчик специальной
постройки; выпущено около 1000 самолетов, обеспечивающих надежную за-
щиту регионов от скоростных и высотных целей;
МиГ-31 - наиболее совершенный в мире специализированный перехват-
чик массовой постройки. Впервые на нем отработана БРЛС с фазированной
антенной решеткой, многоканальным обстрелом целей и впервые в стране —
ракеты класса "воздух-воздух" большой дальности пуска. Эффективен по
всем видам целей — от высотных сверхзвуковых, до низколетящих со снижен-
ной заметностью. Выпущено несколько сотен экземпляров. Имеет уникаль-
ные возможности по групповым действиям. Обеспечил защиту от противника
стратегических направлений.
Самолеты вспомогательного назначения обеспечили подготовку и тре-
нировку летного состава, проведение испытаний и учений.
Самолеты МиГ успешно прошли испытания Великой Отечественной вой-
ны, обеспечили неприкосновенность границ Родины, показали высокие бое-
вые качества во время конфликтов в небе Кореи, Вьетнама, Индии, Среднего
Востока.
Поставки самолетов и передача накопленного опыта значительно помог-
ли организации ПВО многих дружественных стран.
Современное экономическое положение страны предъявляет требования,
которые обусловливают:
• проведение модернизации, в первую очередь МиГ-31 и МиГ-29, со значи-
тельным расширением их возможностей, с обеспечением многофункцио-
нальности, снижением заметности, уменьшением уровня потерь, в том
числе из-за роста боевой живучести, при существенном снижении стои-
мости жизненного цикла за счет роста ресурса и перехода на эксплуата-
цию "по состоянию";
• внедрение самолета МиГ-AT с малой стоимостью летного часа, что по-
зволит увеличить налет летного состава и экономию ресурса боевых са-
молетов;
• создание самолета РЛДН на базе МиГ-110, имеющего высокие возможно-
сти обнаружения малозаметных целей и многофункциональность при
на порядок меньшей стоимости летного часа и уменьшенных расходах
топлива;
• проведение проектных и экспериментальных работ по многофункцио-
нальным боевым самолетам 5-го поколения и беспилотной технике, обес-
печивающих качественное превосходство в конфликтах первой половины
XXI века.
159
2.4. Развитие, совершенствование
и использование в задачах ПВО
истребителей ОКБ им. П. О. Сухого*
2.4.1. Фрагменты истории
Разработки фирмы Сухого в соответствии с требованиями ПВО
В начале 50-х годов ведущие КБ мира приступили к разработке 2-го по-
коления реактивных истребителей, способных значительно превысить ско-
рость звука. За рубежом работы над созданием сверхзвуковых истребителей
очень интенсивно велись такими известными американскими фирмами, как
Локхид, Макдоннелл, Конвэр; французской фирмой Дассо создавался сверх-
звуковой "Мираж" III, в Швеции - SAAB J-35.
В условиях разгоравшейся "холодной войны", когда с нашей страной пы-
тались разговаривать только с позиции силы, перед авиационной промышлен-
ностью возникла настоятельная необходимость создания сверхзвуковых истре-
бителей-перехватчиков, способных совместно с развивающимися ракетными
войсками надежно защитить наши воздушные границы от сверхзвуковых вы-
сотных бомбардировщиков и разведчиков военно-воздушных сил стран НАТО.
Конструкторское бюро П. О. Сухого после четырехлетнего перерыва бы-
ло воссоздано в мае 1953 г., и уже летом этого же года на рассмотрение науч-
но-технического совета Министерства авиационной промышленности были
предъявлены эскизные проекты истребителей-перехватчиков со стреловид-
ными и треугольными крыльями После их рассмотрения принимается реше-
ние строить истребитель-перехватчик с треугольным крылом. Основные па-
раметры, выбранные П. О. Сухим тогда, в 1953 г„ поражали смелостью и
дальновидностью: тяговооруженность, близкая к единице, нагрузка на крыло
около 300 кг/м2. Двигатель А. О. Люльки находился в стадии проектирования,
но для обеспечения заданных перехватчику характеристик нужен был именно
такой мощный двигатель.
На самолете были применены такие новшества, как поворотный стабили-
затор, двухкамерный гидроусилитель управления рулями, сдвижной фонарь
кабины, катапультируемое кресло КС-I, за создание которого начальнику
бригады была присуждена Ленинская премия. Но самым главным новшест-
вом, характерной особенностью выбранной аэродинамической схемы было
-------------------------- \
* В написании подраздела принимал участие Б. Д. Козловских.
160
треугольное крыло. Генеральный конструктор П. О. Сухой и его помощники
выставили в пользу такого крыла следующие веские аргументы: крыло, не пе-
реставая быть стреловидным, сохраняло высокие скоростные характеристики
самолета, обеспечивая при этом увеличение дальности полета, маневренно-
сти, надежности. Конструкция самолета с треугольным крылом резко отлича-
лась от ранее изготавливаемых в серийном производстве, а именно - почти
полностью отсутствовали сварные узлы, широко применявшиеся на ранее
строившихся самолетах. Их заменяли крупные детали, изготавливаемые
штамповкой или литьем, и эта технология являлась новейшим достижением
отечественного авиастроения.
Попутно решена еще одна важная технологическая и конструктивная зада-
ча - внутри крыла помещен силовой кессон, который одновременно стал слу-
жить и топливным баком, причем топливо заливалось непосредственно в кон-
струкцию самолета. Идея герметизированного бака-кессона широко использо-
валась в дальнейшем на самолетах конструкции И. О. Сухого и других КБ.
На первом истребителе-перехватчике с треугольным крылом и централь-
ным воздухозаборником установили одну из первых авиационных радиоло-
кационных станций "Алмаз", состоящую, по существу, из двух станций: об-
зорной и прицельной. Обзорная РЛС имела три антенны, которые размеща-
лись в верхней части воздухозаборника, где для них сделали огромный
антенный обтекатель, выглядевший как экзотический рог. Второй "рог" ан-
тенны прицельной станции находился в нижней части воздухозаборника. В
дальнейшем от этой РЛС П. О. Сухой отказался, нашли другого разработчика
(КБ-1), который спроектировал РЛС ЦД-30 с одной антенной. Под эту РЛС,
размещавшуюся внутри подвижного конуса воздухозаборника, были разрабо-
таны компоновки носовой части самолета, применявшиеся в новых модифи-
кациях. Однако и при такой конструкции носовой части истребителя-
перехватчика не прекращались неприятные явления помпажа двигателя. Ори-
гинальное решение этой проблемы заключалось в использовании противо-
помпажных створок, которые автоматически открывались на сверхзвуковых
скоростях и обеспечивали устойчивую работу двигателя. Это изобретение
быстро завоевало признание во всем мире.
И еще одно оригинальное решение конструкции самолета, примененное
впервые в мире в КБ П. О. Сухого, - боковые воздухозаборники истребителя-
перехватчика Су-15, позволившие разместить в носовой части фюзеляжа под
радиопрозрачным обтекателем мощную РЛС с большим диаметром антенны с
возможностью обнаружения и сопровождения воздушных целей на большой
дальности и даже на фоне земли. При этом значительно расширились боевые
возможности истребителя Су-15.
Способы боевых действий перехватчиков П. О. Сухого и их развитие
Первым истребителем-перехватчиком фирмы П. О. Сухого был самолет
Су-9 (заводской шифр Т-43), принятый на вооружение авиации ПВО после
окончания Государственных совместных испытаний в апреле 1960 г.
(рис. 2.4.1). Этот самолет являлся частью первого в стране авиационно-
ракетного комплекса перехвата (АРКП) воздушных целей, в состав которого
161
11-4094
кроме него входили наземная автоматизированная система наведения на цель
("Воздух-1") и система управления ракетами класса "воздух-воздух".
Наземная система наведения определяла координаты воздушных целей,
вычисляла и передавала на борт перехватчика с помощью радиолинии управ-
ления "Лазурь-М" необходимые команды летчику (заданный курс, команды
целеуказания, включения форсажа, включения РЛС, "накала" на ракеты, от-
ворота от цели и др.).
Управляемые ракеты класса "воздух-воздух" Р-5 наводились по лучу от
РЛС ЦД-ЗО в заднюю полусферу цели под ракурсом 0/4 -г %. Цель атаковыва-
лась на высоте, равной высоте перехватчика, поэтому максимальной высотой
перехватываемой цели мог быть практический потолок истребителя, состав-
ляющий 20 000 м.
Рис. 2.4.1. Истребитель Су-9
Для выхода на эту высоту со скоростью, позволяющей производить атаку
в заднюю полусферу скоростной цели, ведущим инженером ГК НИИ ВВС
полковником Л. Б. Горощенко была предложена и рассчитана энергетически
оптимальная программа набора высоты и скорости, обеспечивающая заданное
приращение полной энергии самолета за минимальное время или с мини-
мальным расходом топлива. Учитывая требования удобства реализации базо-
вой программы, она была аппроксимирована отрезками линий, на которых
постоянным является один из следующих параметров: число М, истинная
скорость V, приборная скорость V„p, высота Н.
При перехвате высотных целей истребитель Су-9 наводится на цель по
курсовым командам системы наведения "Воздух-1", осуществляя полет в вер-
тикальной плоскости по следующему профилю:
• взлет на форсаже и набор высоты разгона 10... 11 км на истинной скоро-
сти 900 км/ч;
• разгон до приборной скорости 1100 км/ч и набор высоты на этой У|1р
до М = 1,9; х
• набор высоты с постоянным числом М = 1,9 до опорной высоты 16 000 м;
• аэродинамическая "горка" с потерей скорости до числа М = 1,6 и с выхо-
дом на высоту атаки 20 000 м.
162
Жизнь диктовала необходимость расширения слишком узкой зоны воз-
можных атак (ракурсы q = 0/4 -г ‘Л в ЗПС) и диапазона высот перехватывае-
мых целей (Нц min, Н„ мах), поэтому следующей модификацией бортовой систе-
мы вооружения была РЛС "Орел-Д" разработки НПО "Фазотрон" с большей
дальностью обнаружения и сопровождения целей, а также управляемая ракета
Р-8, обладающая возможностью атаковать воздушные цели с превышением в
заднюю (РГС и ТГС) и в переднюю полусферы (РГС). Однако относительно
большой диаметр радиолокационной станции, расположенной в центральном
конусе воздухозаборника, ухудшил аэродинамические характеристики моди-
фицированного истребителя Су-11 (рис. 2.4.2), хотя область высот и скоро-
стей перехватываемых целей была несколько расширена по сравнению с ис-
требителем Су-9 за счет новой системы вооружения. Самолет Су-11 также яв-
лялся составной частью АРКП, работая в системе "Воздух-1". Серия этих
самолетов была небольшой.
Рис. 2.4.2. Истребитель Су-11
На опытном самолете Т-405 (Су-9) 28 мая 1961 г. инженер-подполковник
летчик-испытатель Б.М. Адрианов установил абсолютный мировой рекорд
скорости полета на 100-километровом замкнутом маршруте, равный 2092
км/ч, превысив прежний мировой рекорд скорости самолета "Мираж-1 НА"
на 319 км/ч. Летчик-испытатель Анатолий Кознов 25 сентября 1962 г. на са-
молете Т-431 (Су-9) установил новый мировой рекорд скорости, пролетев по
замкнутому 500-километровому маршруту со средней скоростью 2337 км/ч,
превысив прежнее достижение американцев на самолете "Фантом-2", равное
1958 км/ч. Заслуженный летчик-испытатель шеф-пилот фирмы Сухого гене-
рал-майор авиации Герой Советского Союза В.С. Ильюшин установил миро-
вой рекорд высоты, поднявшись 14 августа 1959 г. на самолете Т-431 на вы-
соту 28 700 м, а 4 ноября 1962 г. он же установил абсолютный рекорд высоты
горизонтального полета, равный 21 270 м.
В конце 50 - начале 60-х годов в КБ П. О. Сухого разрабатывается новый
мощный истребитель, имеющий скорость, превышающую скорость звука бо-
лее чем в три раза. Самолет имел заводской индекс Т-37. Этот самолет, несо-
163
1Г
мненно, стал бы новым достижением отечественной авиации, ведь для поле-
тов на такой скорости предполагалось изготовление значительной части кон-
струкции планера из титановых сплавов, так как обшивка самолета нагрева-
лась бы до 300 °C. В сборочном цехе уже заканчивалась постройка первого
самолета, однако в 1960 г. работы по конструированию этого уникального ис-
требителя-перехватчика были прекращены. "Лебединой песней" авиации на-
звал этот самолет П. О. Сухой на совещании руководящих работников, наде-
ясь в душе, что ему позволят продолжить эту его разработку, но, увы... Позд-
нее в ОКБ им. А. И. Микояна подобный истребитель-перехватчик был
построен (МиГ-31).
Су-15 - основа парка истребительной авиации ПВО в 1960-1970 гг.
Первый полет на самолете Су-15 в 1962 г. выполнил летчик-испытатель
В. С. Ильюшин. В марте 1965 г. Су-15 (рис. 2.4.3) был принят на вооружение
авиации войск ПВО страны, первый полет серийного самолета состоялся в
1966 г.
На этом истребителе впервые применены боковые плоские сверхзвуковые
воздухозаборники. В носовой части фюзеляжа была расположена импульсная
РЛС "Орел-Д" (главный конструктор Г. М. Кунявский) с дальностью обнару-
жения и захвата воздушных целей, обеспечивающей перехват целей как в
задней, так и в передней полусферах. Вооружение - управляемые ракеты Р-98
с РГС и ТГС.
Рис. 2.4.3. Истребитель-перехватчик Су-15
Первые Су-15 не имели автоматизированного управления и системы сду-
ва пограничного слоя. В дальнейшем самолет был оборудован системой авто-
матизированного управления САУ-58, созданной на 3-м МПЗ под руково-
дством О. В. Успенского; она обеспечивала полную (без участия летчика) ав-
томатизацию процесса перехвата воздушных целей по командам системы
наземного наведения "Воздух-1" с линией передачи команд "Лазурь" от взле-
та до захода на посадку. Самолет, его вооружение и наземные средства
управления образовывали единый комплекс перехвата Су-15Т-98.
164
В дальнейшем для улучшения летно-технических и взлетно-посадочных
характеристик на самолете была установлена система сдува пограничного
слоя и модернизировано крыло; угол стреловидности составил 45°.
Истребители более поздних серий были снабжены двигателями ТРДФ
Р-11Ф2СУ-300, а в дальнейшем еще более мощными Р-13-300 (с тягой каж-
дый по 6500 кг). Вместо РЛС "Орел-Д" на ряде серий устанавливались модер-
низированные станции "Орел-ДМ".
В 1969 г. истребитель оснащается более мощной РЛС "Тайфун" (главный
конструктор Ф. Ф. Волков), подвергшейся доработке в результате испытаний;
появляется ее модификация "Тайфун-М", которая устанавливается на самолет
вместе с модернизированными ракетами Р-98М.
В результате в 1970 г. появляется самолет Су-15ТМ (комплекс Су-15ТМ-
98М), строившийся большой серией. Всего было выпущено 1400 перехватчи-
ков Су-15 различных модификаций, составивших в 60-70-е годы основу ис-
требительного парка войск ПВО страны.
В целях совершенствования характеристик прохождения радиолокацион-
ного сигнала конический обтекатель антенны РЛС был заменен на обтекатель
оживальной формы, улучшивший условия работы станции, но несколько сни-
зивший ЛТХ самолета.
В 1973 г. самолеты Су-15 и Су-15ТМ начали оснащаться дополнительны-
ми подкрыльевыми пилонами с управляемыми ракетами ближнего боя Р-60 и
двумя контейнерами УПК-23-250 с пушками ГШ-23; были произведены дора-
ботки, позволившие подвешивать под самолетом свободнопадающие бомбы
(их применение, однако, ограничивалось отсутствием специализированного
прицела). Су-15ТМ испытывался также со встроенной пушкой ГШ-23 с бое-
комплектом 250 патронов.
Для тренировки летчиков создан двухместный самолет Су-15УТ, на кото-
ром отсутствуют вооружение и бортовая РЛС, а позже выпущена серия учеб-
но-тренировочных самолетов Су-15УМ без радиоприцела, но с управляемыми
ракетами с ТГС.
Истребители Су-15 широко использовались в качестве летающих лабора-
торий. Так, второй опытный самолет Т-58Д2 был переоборудован для испыта-
ния лыжного шасси, устанавливаемого вместо колес и позволяющего эксплуа-
тировать самолет с мягкого грунта (модификация получила обозначение
Т-58Л). Первый опытный самолет Т-58Д1 использовался для отработки взлета
с применением подъемных двигателей РД-36-35 (самолет Т-58Д1, получивший
новое обозначение Т-58ВД, демонстрировался на авиационном празднике в
Тушино в 1967 г.). В середине 60-х годов два самолета Су-15Т были задейство-
ваны в программе испытаний системы дозаправки топливом в полете. На од-
ном из самолетов под фюзеляжем подвешивался контейнер со шлангом и кону-
сом, второй самолет нес неубирающуюся штангу-топливоприемник. В даль-
нейшем эта система нашла применение на самолетах Су-24, МиГ-31 и др. На
самолетах Су-15 отрабатывалась прицельно-навигационная система бомбарди-
ровщика Су-24, крыло нового типа и проводился ряд других исследований.
Комплекс Су-15ТМ-98М способен перехватывать воздушные цели, летя-
щие со скоростью до 2300 км/ч в передней полусфере и 1600 км/ч в задней
полусфере в диапазоне высот 1000...23 000 м.
165
2.4.2. Истребитель Су-27.
Конструкция, разработка и облик
Немного о конструкции и силовой установке
Планер самолета (рис. 2.4.4) выполнен по интегральной аэродинамической
схеме. Самолет имеет свободнонесущее механизированное крыло и двухкиле-
вое вертикальное оперение. Интегральные компоновки самолета позволили
реализовать эллиптическое распределение циркуляции по размеру крыла,
обеспечить прирост несущих свойств на больших углах атаки, снижение уров-
ня волнового сопротивления на сверхзвуковых скоростях полета, а также раз-
местить 10 000 л топлива внутри самолета, не вызывая никаких ограничений
ни по предельному углу атаки, ни по эксплуатационной перегрузке.
Рис. 2.4.4. Истребитель-перехватчик Су-27
Аэродинамическая и конструктивная компоновка Су-27 характеризуется
наличием статической неустойчивости в продольном канале. Эта компоновка в
сочетании с системой дистанционного управления обеспечивает пилотирова-
ние самолета как устойчивого и позволяет уменьшить балансировочные потери.
Для повышения аэродинамического качества крыла специально разрабо-
тана адаптивная система управления отклонением носков крыла и флаперо-
нов, которая отклоняла их при маневрировании, непрерывно устанавливая их
в оптимальное положение в зависимости от угла атаки; этим была практиче-
ски ликвидирована срывная тряска самолета (ограничение по тряске самолета
возросло с 12 до 24°) и обеспечена возможность ведения точного прицелива-
ния на больших углах атаки.
Конструктивно планер самолета состоит из следующих основных элемен-
тов: головной части фюзеляжа, фюзеляжа в зоне бака, центроплана, хвостовой
части фюзеляжа с двигательными отсеками, воздухозаборников с каналами,
166
отъемных частей крыла, двухкилевого вертикального оперения, консолей ста-
билизатора, гаргрота, трехопорного шасси.
Головная часть фюзеляжа включает конус, носовой, подкабинный и за-
кабинный отсеки оборудования, гермокабину экипажа, нишу передней опоры
шасси. Фюзеляж в зоне бака включает бак № 1, гаргрот над баком, верхнюю
надстройку бака в гаргроте (топливный отсек гаргрота), передний отсек, отсе-
ки основания опор шасси. Центроплан является силовым агрегатом и топлив-
ным баком-отсеком; на его верхней поверхности установлен гаргрот. Хвосто-
вая часть фюзеляжа самолета состоит из двух силовых мотогондол с хвосто-
выми балками, соединенными между собой центральной балкой. Воздухо-
заборники прямоугольного сечения (с закруглениями в нижней части) распо-
ложены под фюзеляжем, переходят в канал круглого сечения перед входом в
двигатели. Отъемные части крыла - стреловидной формы в плане с углом
стреловидности по передней кромке 41 , с поверхностными носками и флапе-
ронами. Горизонтальное оперение состоит из двух цельноповоротных консо-
лей стабилизатора. Трехопорное шасси с управляемой передней опорой обес-
печивает эксплуатацию самолета с аэродромов 2-го класса с бетонирован-
ными ВПП и с грунтовыми ВПП с прочностью грунта 6...8 кг/см2 при
нормальной взлетной массе и 8,5 кг/см2 при максимальной взлетной массе.
Самолет оснащен двумя двухконтурными турбореактивными двигателя-
ми АЛ-31Ф с увеличенной до 1740 К температурой газа перед турбиной и
раскруткой роторов высокого и низкого давления на особом режиме. Стендо-
вая тяга на полном форсаже при особом режиме составляет 12 800 кг.
Система автоматического регулирования двигателя АЛ-31Ф состоит из
гидромеханической и электронной частей. Последняя включает в себя ком-
плексный регулятор двигателя на максимальном и форсированном режимах
силовой установки. При отказе электронной части и работе двигателя на
дроссельных бесфорсажных режимах регулирование обеспечивает гидроме-
ханическая часть системы.
Из истории создания самолета Су-27
Работы по проектированию перспективного истребителя нового поколе-
ния начались под руководством П. О. Сухого в 1969 г. К середине 70-х годов
была сформирована общая концепция машины, которая предусматривала соз-
дание высокоманевренного самолета, обладающего большой дальностью по-
лета и мощным вооружением, по своим техническим данным превосходящего
аналогичный по назначению американский истребитель F-15.
В конструкции истребителя, получившего в ОКБ обозначение Т-10, на-
мечался ряд принципиально новых решений. Планер проектировался по так
называемой интегральной компоновке с плавным сопряжением крыла и фюзе-
ляжа. Самолет при этом имел некоторую степень статической неустойчиво-
сти, которая обеспечивала ему исключительные маневренные возможности.
Для реализации заданных аэродинамических и динамических характеристик
во всем диапазоне высот и скоростей крыло самолета имело немеханизиро-
ванную переднюю кромку оживальной формы и корневой наплыв. Для обес-
печения полета неустойчивого самолета была создана система дистанционно-
го управления.
167
К началу разработок конструкторской документации в 1975-1976 гг. про-
ведены исследования девяти вариантов компоновки самолета, и в начале
1977 г. был разработан комплект рабочих чертежей и построен первый летный
экземпляр самолета Т-10-1, подъем которого осуществил шеф-пилот ОКБ
В. С. Ильюшин. Однако при анализе летных и боевых характеристик с помо-
щью математических моделей в "ОКБ Сухого" и НИИАС, а также на стенде
полунатурного моделирования КПМ-2300 выяснилось, что истребитель Су-27
(Т-10-1) проигрывает в воздушном бою американскому истребителю F-15 при-
мерно на 30 %. Тогда главным конструктором этого самолета М.П. Симоновым
было принято решение о необходимости полной переработки проекта. Разра-
ботку второй итерации приходилось делать, несмотря на то, что серийный за-
вод к этому времени уже наладил выпуск самолетов, и к концу 1980 г., когда
был создан и запушен в реализацию улучшенный проект истребителя Су-27
второй итерации типа Т-10С, завод уже успел выпустить 10 серийных самоле-
тов типа Т-10-1. Пришлось не только заново повторить все проектирование, но
и практически полностью заменить всю оснастку на серийном заводе. Как по-
казала жизнь, это смелое решение главного конструктора оказалось верным,
что доказывает сегодняшнее признание самолета в мире.
К 1981 г. был готов опытный образец нового истребителя (Т-10С). В аэ-
родинамическую компоновку внесены такие усовершенствования:
• установлено новое крыло с прямолинейной передней кромкой, занятой
адаптивным предкрылком, и острым наплывом;
• изменена механизация задней кромки крыла - традиционные элероны и
отклоняемые закрылки уступили место флаперонам;
• уменьшено поперечное сечение фюзеляжа перед кабиной и увеличено се-
чение его головной части;
• изменены конструкции шасси, тормозного щитка, форма мотогондол,
конфигурация вертикального оперения;
• выбрано лучшее место установки килей.
Состав и функционирование системы бортового оборудования
Бортовое радиоэлектронное оборудование (БРЭО) истребителя-перехват-
чика Су-27 представляет собой единую связанную систему комплексов и аппа-
ратных средств, объединенных между собой связями в последовательном би-
полярном коде по ГОСТ 18977-79. В состав БРЭО входят следующие элементы:
• Система управления вооружением СУВ С-27, которая включает:
- бортовую радиолокационную станцию БРЛС-27;
- оптико-электронную прицельную систему ОЭПС-27, состоящую из опти-
ко-локационной станции ОЛС-27 и нашлемной системы целеуказания
НСЦ "Щель";
- систему индикации "Нарцисс" со своим вычислителем "Орбита-20";
- цифровую вычислительную систему, состоящую из двух взаимосвязан-
ных вычислителей СЦВ-1 и СЦВ-2 на базе ЦВМ Ц-100.
• Пилотажно-навигационный комплекс ПНК-10 с цифровым вычислителем
"Маневр-В".
• Радиостанции ближней навигации и посадки РСБН, дальней навигаций
"Квиток-1".
168
• Система управления оружием СУ0-27.
• Система объективного контроля учебно-боевых действий СОК УВД.
• Комплекс радиоэлектронного подавления КРЭП в составе станции пре-
дупреждения об облучении “Береза” и станции активных помех
"Сорбция".
• Типовой комплекс связи ТКС-2П.
• Бортовая аппаратура наведения БАН "Спектр-1".
• Антенно-фидерная система АФС "Лоток-НР-10".
• Система сбора полетной информации "Тестер-УЗ".
• Комплексная информационная система сигнализации "Экран".
• Система аварийной сигнализации САС-4.
• Маркерный радиоприемник МРП.
• Самолетные ответчики СРО-10 и СО-72.
• Автоматический радиокомпас СУРА.
Система управления вооружением СУВ-27 обеспечивает поражение воз-
душных и наземных (надводных) целей при решении самолетом боевых за-
дач. При этом основным источником получения информации в режимах "воз-
дух-воздух" и "воздух-поверхность" является радиолокационный комплекс
РЛПК-27, который решает задачи автоматического обнаружения, опознава-
ния, сопровождения "на проходе" целей в передней и задней полусферах с
выбором наиболее опасной цели.
Для решения задач поиска, обнаружения, захвата и автоматического со-
провождения воздушных целей по их тепловому излучению, измерения и вы-
дачи дальности до воздушных и наземных целей, измерения и выдачи угло-
вых координат сопровождаемых целей используется оптико-электронная
прицельная система. Для индивидуальной и индивидуально-групповой защи-
ты самолетов от поражения наземными и воздушными комплексами ПВО
противника применяются комплекс радиоэлектронного подавления типа "Ка-
тунь", "Хибины" и система взаимно-групповой защиты типа "Ятаган".
Бортовая аппаратура системы автоматизированного наведения "Спектр-1"
обеспечивает наведение истребителей на цели, перехват и прием от наземных
и морских автоматизированных систем наведения команд управления и наве-
дения самолетов на наземные и воздушные цели противника. Автономные и
полуавтономные действия групп истребителей-перехватчиков Су-27 обеспе-
чиваются с помощью бортового типового комплекса связи, который осущест-
вляет помехозащищенную засекреченную телекодовую радиосвязь самолетов
между собой и с пунктами управления АСУ.
Пилотажно-навигационный комплекс ПНК-10 производит непрерывное
измерение, вычисление и выдачу пилотажной и навигационной информации,
сигнализирует об опасных режимах, определяет местоположение самолета,
обеспечивает автоматическое и директорное управление по маршруту и при
заходе на посадку (в режиме "Навигация"), а также при дальнем наведении на
воздушную цель, при самонаведении и выходе из атаки по сигналам СУВ
(в режиме "Наведение"). Оборудование комплекса ПНК-10 по точности, на-
дежности и эксплуатационным характеристикам находится на уровне анало-
гичных образцов зарубежной техники, а по степени автоматизации и функцио-
нальным возможностям - превосходит их. В состав ПНК-10 входят: система
автоматического управления САУ-10; информационный комплекс вертикали и
169
курса ИК-ВК на основе инерциальной курсовертикали типа Ц-050; информа-
ционный комплекс высотно-скоростных параметров ПК ВСП на основе цифро-
вой системы воздушных сигналов СВС-2Ц, системы ограничительных сигна-
лов СОС-2, радиовысотомера РВ-21, приборов и датчиков; комплекс радиотех-
нических средств навигации и посадки; навигационный вычислитель А-313
"Маневр-В"; аппаратура индикации, управления и коммутации.
Для отображения пилотажно-навигационной, обзорно-прицельной, так-
тической, командной, справочной и рекомендательной информации, а также
информации о состоянии находящегося на борту самолета оружия и бортово-
го оборудования служит система отображения информации "Нарцисс", два
индикатора которой - индикатор на лобовом стекле (ИЛС) и индикатор пря-
мой видимости (ИПВ) - обеспечивают выдачу летчику всей необходимой ин-
формации. Эта информация является конечным продуктом "бортового интел-
лекта" истребителя, алгоритмы которого реализуются в двух его цифровых
вычислителях: СЦВ-1 и СЦВ-2. Содержание "бортового интеллекта" пред-
ставляет собой систему алгоритмов обработки первичной информации от
датчиков (РЛС, ОЭПС, БАН и КРЭП), вторичной обработки информации,
расчета и выдачи команд летчику и САУ (см. подразд. 6.5 ).
Для объективного контроля технического состояния самолета и его сис-
тем, действий экипажа с документированием результатов контроля на опера-
тивных видах подготовки и приоритетной выдачи текстовых сообщений при
контроле в полете служит система встроенного контроля и предупреждения
экипажа "Экран".
Способности самолета Су-27 к совершенствованию и модификации
Как отмечают российские и иностранные специалисты, современная аэро-
динамическая компоновка Су-27, высокая тяговооруженность, большой запас
топлива, широкий диапазон высот и скоростей полета, современное управляе-
мое ракетное вооружение, высокоэффективный комплекс радиоэлектронного
оборудования делают этот самолет одним из самых передовых и совершенных
истребителей в мировой авиации настоящего времени, обеспечивают его высо-
кую эффективность при перехвате воздушных целей и позволяют ему уверенно
вести дальние и ближние маневренные воздушные бои (рис. 2.4.5).
Конструкторская мысль в ОКБ П. О. Сухого на этом не остановилась. Па-
раллельно с основной разработкой и испытаниями авиационного комплекса
Су-27 шло его совершенствование, углубление и расширение возможностей.
Особые требования были предъявлены к этапу ближнего воздушного боя
с тактической авиацией противника, где стали жизненно необходимыми бое-
вые маневры между атаками с быстрым изменением направления полета. При
этом самолет должен быть способен проводить достаточно продолжительное
"нацеливание" продольной оси для многократного применения оружия, иметь
достаточные характеристики и возможности для занятия тактически выгодного
положения для боя и выхода из него без вреда. Такими характеристиками и об-
ладает исгребитель Су-27. Они дали возможность реализовать новые режимы
полета с элементами сверхманевренности. Эти режимы позволили самолету
Су-27 и его последующим модификациям выполнять новые боевые маневры,
получившие названия "кобра", "колокол", "мангуст", "хук", "чакра" (рис. 2.4.6).
170
Рис. 2.4.5. Су-27 - истребитель завоевания и удержания господства в воздухе
Сущность таких маневров состоит в энергичном (до 60...70 град/с) пово-
роте самолета вокруг поперечной оси в нужном направлении с последующей
его фиксацией; самолет выходит на сверхбольшие углы атаки (более 90°). Па-
дение скорости компенсируется возможностью опережающего применения
оружия по противнику. Использование режимов сверхманевренности практи-
чески исключает эффективный пуск ракет противником. Выход самолета на
критически допустимый режим хотя бы на очень короткое время исключи-
тельно важен в воздушном бою. Появляется возможность ухода от сопровож-
дения доплеровской РЛС путем энергичного сброса скорости самолета до
околонулевых значений и фиксирования самолета в этом положении в тече-
ние нескольких секунд. Такими возможностями не обладает пока ни один са-
мый маневренный самолет Запада.
П. О. Сухим в самолет Су-27 были заложены следующие фундаменталь-
ные качества и признаки: интегральность; задняя центровка; дистанционное
управление; нижнее размещение двигательных гондол.
М. П. Симонов сформировал компоновку с совершенным аэродинамиче-
ским обликом и ввел исключительно новый элемент - адаптивное отклонение
механизации передней и задней кромок крыла, что расширило функции сис-
темы дистанционного управления и приблизило поляру самолета к так назы-
ваемой огибающей.
171
Рис. 2.4.6. Боевые маневры "колокол", "чакра", "кобра", "мангуст", "хук",
выполняемые Су-27, Су-ЗОМКИ, Су-37
На самолете Су-27 потребные для решения задач ПВО дальности полета,
диапазон высотно-скоростных характеристик и высокие маневренные воз-
можности обеспечиваются:
• большой тяговооруженностью, необходимой для реализации эксплуата-
ционных установившихся и неустановившихся виражей;
• малой нагрузкой на крыло, необходимой для выполнения маневров с мак-
симальными перегрузками и большими угловыми скоростями разворота;
• большими значениями коэффициента подъемной силы Судоп ;
• тонким профилем крыла с малым сопротивлением и с высоким аэродина-
мическим качеством;
• большими внутренними объемами для размещения топлива.
Степень совершенства истребителя-перехватчика Су-27 как транспортно-
го средства может быть оценена совокупностью критериев, условно разде-
ленных на следующие группы [2.19]:
• комплексные критерии, связывающие геометрические, весовые и энерге-
тические характеристики самолета;
• весовые критерии, характеризующие рациональность конструктивно-
силовой схемы, качество конструкторских и компоновочных решений;
172
• геометрические критерии, оценивающие уровень совершенства внешней
и внутренней компоновки самолета;
• выходные критерии, напрямую характеризующие уровень летно-
технических параметров самолета.
В табл. 2.4.1, составленной по данным, приведенным в [2.19], сравнива-
ются некоторые из критериев указанных групп для самолета Су-27 и наиболее
удачных зарубежных истребителей, в том числе 4-го поколения - F-15А,
F-15C, F-16A, F/A-18, "Мираж" 2000.
Оценка совершенства истребителей
Таблица 2.4.1
Груп- па Критерии совершенства самолета F-4E F/A-18 F-16A F-I5A F-I5C "Мираж" 2000 Су-27
Комплексные критерии Взлетная тяговоору- жснность, Ктл^Рф/С,,,,, 0,76 0,90 1,02 1,14 1,05' 0,81 1.15
Боевая тяговооружен- ность, Ri, = Рф/Gi, 0,93 1,06 1,15 1,26 1,41 1,10 1,29
Тяга, приходящаяся на 1 м2 миделева сечения (конструкторский кри- терий), Р5=Рф/8„„д 4,1 5,1 4,7 5,3 5,3 3,8 6,4
Весовые критерии Коэффициент плотно- сти компоновки само- лета, y„n=GM/Vc 410 448 415 380 340 428 438
Коэффициент весового совершенства конст- рукции планера, 26,2 22,2 20,6 20,1 20,9 20,5 20,9
Относительная масса топлива во внутренних баках (компоновочный критерий), GT0=GT/Gny„ 0,36 0,480 0,455 0,425 0,463 0,690 0,56
Геометриче- ские критерии Относительная пло- щадь миделева сече- ния, SMo~ SMHa/Snn 0,06 0,044 0,049 0,048 0,048 0,053 0,04
Относительный объем топливных баков, vT0=vr/vc 0,18 0,208 0,172 0,128 0,138 0,188 0,22
Выходные критерии Относительный км- расход топлива на ма- лой высоте, С}цмо—Qhm/Som 0,03 0,030 0,027 0,022 0,023 - 0,02
Относительный км- расход топлива при по- лете на большой высо- те, С}нбо—Онб/^Jcp 0,171 0,154 0,121 0,126 0,10
Из сравнения видно, что по уровню представленных критериев, характе-
ризующих основные геометрические, весовые и аэродинамические парамет-
ры, истребитель Су-27 не уступает зарубежным истребителям 4-го поколения,
а в ряде случаев превосходит их.
173
Усилия фирмы "ОКБ Сухого" постоянно направлены на наращивание
эффективности разрабатываемых самолетов, в первую очередь Су-27, путем
создания все более совершенных модификаций.
Компоновочная схема истребителя Су-27 обладает рядом признаков, при-
дающих самолету как платформе - носителю быстро улучшающихся систем,
оружия и двигателей, высокие модификационные способности. К таким при-
знакам относятся:
• интегральная схема самолета с несущим корпусом, обеспечивающая
большой запас топлива и высокую плотность компоновки;
• взаимное расположение центроплана и мотогондол, позволяющее в зоне
между ними разместить вооружение способом "тандем" (с малым аэроди-
намическим сопротивлением) и создать конформные контейнеры различ-
ного назначения;
• размещение двигателей в раздельных разнесенных мотогондолах с раз-
вязкой их относительно оборудования и топливных баков;
• компоновка силовой установки, позволяющая использовать на самолете
модификации двигателей и даже новые перспективные двигатели практи-
чески без доработок конструкции самолета;
• схема фюзеляжа, обеспечивающая возможность применения на самолете
бортовой РЛС увеличенного диаметра антенны, расширенной кабины с
комфортными условиями для экипажа, РЛС заднего обзора и других
новшеств;
• схема главной опоры шасси, позволяющая со значительно меньшими до-
работками конструкции планера производить модификацию шасси само-
лета;
• простая геометрическая форма топливных баков, их "развязка" с воздуш-
ными каналами и размещение двигателей в отдельных мотогондолах
обеспечивают возможности для наращивания средств повышения боевой
живучести самолета.
Изучение зарубежных и отечественных информационно-технических ма-
териалов по перспективным истребителям позволяет отобрать основные на-
учно-технические новшества и усовершенствования, характерные для самоле-
тов-истребителей 90-х годов (табл. 2.4.2). В этой таблице показана степень
реализации новых научно-технических достижений в серийном самолете
Су-27, в программе его модернизации и в программах дальнейшей модифика-
ции. Из таблицы видно следующее:
1) на серийном самолете Су-27 уже реализован ряд важных научно-
технических разработок, характерных для программ перспективных истреби-
телей (основные из них - несущий корпус, интегральная схема, неустойчи-
вость в продольном канале, частичная адаптивность крыла);
2) в ближайшей модернизации самолета реализуется большое количество
нововведений, позволяющих значительно увеличить его эффективность и
боевые возможности; 4
3) дальнейшие модификации самолета охватывают большую часть из-
вестных достижений научно-технического прогресса в соответствии с требо-
ваниями разработки истребителей 5-го поколения.
174
Таблица 2.4.2
Новшества и усовершенствования в перспективных истребителях
Перечень новшеств и усовершенствований Серийный самолет Су-27 Модернизации Су-27 Пути дальнейшей модификации
Аэродинамика и компоновка
Несущий корпус Реализовано Дальнейшее развитие
Крыло, объединенное с фю- зеляжем II и >1 <1
Статическая неустойчивость Неустойчивость в про- дольном канале (5 %) Расширенная неустойчивость в продольном канале Введение неустойчивости в путевом канале
Адаптивное крыло Управление носком и флаперономв зависимости от а Управление носком и флапероном в функции от а и М Дальнейшее развитие
Непосредственное управле- ние силами То же Установка ПГО с оптими- зацией несущих свойств То же
Конфигурация самолета, оп- ределяемая системой управ- ления Реализовано Дальнейшее развитие
Конформное размещение оружия н дополнительного топлива " и Конформный контейнер для ракет класса " воздух-воздух" Контейнер для ракет клас- са "воздух-воздух", кон- формные баки
Силовая установка
ЭДСУ силовой установки - Реализуется
Управление вектором тяги ••
Кабина
Многофункциональные жид- ко-кристаллические индика- торы - Оснащается Дальнейшее развитие
Управление самолетом боко- вой ручкой - Реализуется
Кабина, позволяющая экипа- жу переносить большие пере- грузки - Увеличен угол наклона кресла Дальнейшее развитие
Управление вооружением и полетом
Мультиплексный канал ин- формационного обмена Отсутствует Реализуется Дальнейшее развитие
Бортовая РЛС переднего об- зора Установлена БРЛС с механической антенной Устанавливается многорежимная БРЛС с ФАР Проработка БРЛС с актив- ной ФАР н расширенными характеристиками
Бортовая РЛС обзора ЗПС - Реализуется Дальнейшее развитие
Групповые полуавтономные действия Реализованы режимы КН, БН, БП при одиноч- ных действиях Частично реализуются режимы группового наведения Алгоритмизация группо- вых действий и рубежных задач
Автоматизация группового взаимодействия Реализовано Информационное, огневое, помеховое взаимодействие Автоматизация траектор- ного взаимодействия
Низковысотный полет Отсутствует Реализуется
Автоматизация атаки нескольких целей -
Электродистанционная сис- тема управления самолетом Реализована аналоговая СДУ в одном канале Реализация цифровой СДУ во всех каналах управления
Комплексная система управ- ления вооружением и поле- том — Комплексирование СУВ и КРЭП. Реализация объеди- ненной ЭДСУ самолетом и двигателем Объединение СУВ, КРЭП и САУ самолетом и двига- телем
Использование систем ин- теллектуальной помощи эки- пажу Отсутствует Частично реализуются системы подсказок Использование БОСЭС
175
Все это говорит о высокой модификационной способности истребителя
Су-27. Восприимчивость самолета Су-27 и коллектива его разработчиков к
практически любым перспективным техническим новшествам и усовершен-
ствованиям позволила создать на его базе целое семейство новых самолетов-
истребителей для уничтожения воздушных и наземных целей, для ведения
радиоэлектронной борьбы и разведки. Истребитель Су-27 доказал свои заме-
чательные возможности видоизменяться и развиваться [2.2, 2.5, 2.13—2.22].
2.4.3. Многофункциональные самолеты
ОКБ им. П. О. Сухого - современное воплощение
научно-технического прогресса
В условиях бюджетных ограничений наиболее приемлемым способом
поддержания высокого качественного уровня истребительной авиации России
явилась глубокая модернизация самолетов 4-го поколения. Модернизация -
весьма экономный путь совершенствования боевой техники и оружия, обнов-
ления и продления жизни наиболее удачных образцов. К таким образцам, без-
условно, относится и Су-27, составивший основу создания семейства истре-
бителей, которые условно относят к "поколению 4,5" [2.14] или к "поколению
4+" [2.21].
Самолет Су-27 и его модификации - яркий пример непрерывного совер-
шенствования базовой конструкции, силовой установки и бортового оборудо-
вания.
Объединенные ВВС Российской Федерации основные усилия направляют
не на создание новых истребителей, а на придание существующим самолетам
качеств многофункциональности, на повышение их боевых возможностей, на
обеспечение применения современных большой дальности высокоточных
средств поражения воздушных и наземных целей; эти тенденции и нашли от-
ражение в создании ОКБ им. П. О. Сухого линии модификаций базового са-
молета Су-27.
Ниже приводятся данные по ряду новых самолетов, показанных на меж-
дународных авиационных выставках и салонах [2.20, 2.21]:
Су-30 (на основе Су-27УБ) - многофункциональный двухместный боевой
самолет;
Су-33 (прежнее обозначение Су-27К) - многоцелевой иетребитель-
перехватчик ВМФ палубного базирования;
Су-34 (прежнее обозначение Су-27ИБ) - двухместный тактический мно-
гофункциональный ударный самолет;
Су-35 (прежнее обозначение Су-27М) - многоцелевой истребитель-
перехватчик ВВС, основная глубокая модернизация Су-27;
Су-37 — развитие самолета Су-35 с системой управления вектором тяги и
новой БРЛС.
Все указанные самолеты имеют следующие общие свойства:
• решают задачи противовоздушной обороны;
• обладают возможностью применения оружия по наземным (надводным)
целям;
176
• способны в течение длительного времени осуществлять барражирование
на удалении до 1000 км от аэродрома вылета;
• выполнены по аэродинамической схеме "неустойчивый интегральный
триплан" с отклоняемым передним горизонтальным оперением (ПГО);
• оборудованы современными российскими пилотажно-навигационными
комплексами и системами управления вооружением с совершенными ха-
рактеристиками и возможностями.
Размещение переднего горизонтального оперения на корневом наплыве
крыла самолетов Су-30МКИ, Су-33, Су-34, Су-35, Су-37 увеличило несущую
поверхность на 7% площади крыла, обеспечив прирост подъемной силы на
15% и улучшение аэродинамического качества самолета.
Электродистанционная система управления на этих самолетах управляет
положением ПГО, носков и флаперонов крыла, горизонтального оперения; на
Су-30МКИ, Су-35, Су-37 - также отклонением поворотных сопл двигателей.
Самолеты Су-30, Су-ЗОМК
Самолет Су-30 создан на базе учебно-боевого самолета Су-27УБ. Пред-
назначается для авиации ПВО, обладает возможностью выполнения длитель-
ных полетов, ведения боевых действий в одиночку и группой; может также
использоваться для непосредственного управления другими истребителями
при ведении групповых действий в качестве воздушного командного пункта.
Самолет Су-ЗОМК является уже многофункциональным истребителем,
имеющим достаточно развитые возможности работы "по земле" с использо-
ванием управляемых ракет класса "воздух-поверхность". Самолет разработан
в ОКБ Сухого (главный конструктор И. В. Емельянов), изготавливается на
иркутском авиационном заводе ИАПО "Иркут". На самолете оборудована
двухместная кабина экипажа с тандемным расположением летчика и штурма-
на-оператора. Оба места кабины, закрываемой общим фонарем, имеют полное
дублирование всех органов управления самолетом, двигателями, оборудова-
нием и вооружением.
В конце 80-х годов на самолете Су-27УБ была отработана система доза-
правки топливом в полете от однотипного самолета-заправщика. В 1987 г.
летчиками ОКБ Н.Ф. Садовниковым и И. В. Вотинцевым был совершен даль-
ний беспосадочный перелет по маршруту Москва-Комсомольск-на-Амуре-
Москва протяженностью 13 440 км за 15 ч 42 мин летного времени с несколь-
кими дозаправками в воздухе.
В июле 1997 г. летчик В. Ю. Аверьянов первый раз поднял самолет
Су-ЗОМК. На нем установлены два двигателя АЛ-31ФП разработки
АО "А.Люлька-Сатурн" (главный конструктор А. В. Андреев) с управлением
вектором тяги. На двигателе этого самолета вектор тяги вращается вокруг на-
клонной оси; таким образом, при отклонении сопла образуются горизонталь-
ная и вертикальная составляющие тяги.
Применение управляемого вектора тяги, включенного в контур управле-
ния самолетом, позволяет уменьшить величину минимальной скорости полета
и выполнять фигуры пилотажа на малых скоростях, вплоть до околонулевых,
без ограничений по углу атаки; при этом самолет гарантирован от сваливания
в "штопор".
177
12-4094
Отличительными особенностями самолета Су-ЗОМК (рис. 2.4.7) являются:
• осуществление дальнего патрулирования, сопровождения и радиолокаци-
онного дозора;
• применение высокоточного оружия по наземным и надводным целям без
захода в зону ПВО противника;
• расширенные возможности ведения воздушного боя, в том числе обеспе-
чение атаки нескольких целей одновременно;
• противодействие радиоэлектронным и оптико-электронным средствам
противника.
Основное назначение Су-ЗОМК - перехват дальних целей. Бортовая сис-
тема управления вооружением (СУВ) включает в себя импульсно-
доплеровскую помехозащищенную РЛС, позволяющую вести поиск и сопро-
вождение целей на фоне земли, оптико-электронный локатор с нашлемной
системой целеуказания. Самолет Су-ЗОМК способен в течение 10 ч беспоса-
дочно барражировать в воздухе и после этого наносить удары по воздушным,
наземным и морским целям.
Имеется бортовая аппаратура наведения по помехозащищенной линии
КРУ, обеспечивающая вывод самолета на цель по командам внешней АСУ.
Навигационное оборудование включает спутниковую навигационную систе-
му, работающую в поле систем ГЛОНАСС и "Навстар" с автоматическим пе-
реходом на тот канал, который обеспечивает лучшую точность. Реализована
возможность автоматизированного полета на малой высоте с огибанием рель-
ефа. В каждой кабине установлены цветные жидкокристаллические индика-
торы с кнопочным обрамлением, на которые выводится двух- и трехмерное
изображение местности из цифровой базы данных.
Вооружение, применяемое на Су-ЗОМК, содержит:
• всеракурсные управляемые ракеты среднего и ближнего воздушного боя
с активными и полуактивными РГС и ИГС Р-27, Р-27Э, РВВ-АЕ, Р-73 -
при работе по воздушным целям;
Рис. 2.4.7. Двухместный истребитель-перехватчик Су-ЗОМК
178
• противорадиолокационные ракеты Х-ЗШ, ракеты с телевизионным и ла-
зерным наведением Х-25ЛД, Х-29Л и Х-29Т, крылатую ракету Х-59М с
телевизионным наведением, обычные авиационные бомбы, а также кор-
ректируемые КАБ-500, неуправляемые авиационные ракеты - для пора-
жения наземных и морских целей;
• стандартную встроенную авиационную пушку ГШ-301 калибра 30 мм с
боекомплектом 150 снарядов.
Летно-технические характеристики самолета Су-ЗОМК
Двигатели .................................... 2хАЛ-31ФП
Взлетная масса, кг:
нормальная.......,............................ 25 000...26 000
максимальная............................... 34 000. ..38 000
Максимальная скорость полета, км/ч:
на малой высоте............................... 1350
на большой высоте.............................. 2150
Максимальное число М полета........................ 2
Максимальная эксплуатационная перегрузка...... 8...9
Практический потолок, км...................... 17,5... 18
Тяговооруженность взлетная....................... 1,1
Дальность полета, км:
с внутренним запасом топлива.................. 3000
с одной дозаправкой............................ 5200
с двумя дозаправками........................... 6900
Максимальная боевая нагрузка, кг................ 8000
Количество точек подвески вооружения:
общее........................................... 12
для размещения УР................................ 10
Самолет Су-33
Самолет Су-33 (заводское обозначение Су-27К) разработан в фирме "ОКБ
Сухого" (главный конструктор К. X. Марбашев), изготовляется серийно на
авиационном заводе КнААПО (г. Комсомольск-на-Амуре), принят на воору-
жение ВМФ России в 1998 г. Предназначен, в первую очередь, для обороны
кораблей от средств воздушного нападения противника.
Палубный самолет Су-27К спроектирован на базе истребителя Су-27.
В отличие от предшественника он имеет размещенное на наплыве крыла пе-
реднее горизонтальное оперение (ПГО), оснащен складывающимися консо-
лями крыла и горизонтального оперения, усиленным шасси и выпускаемым
на посадке тормозным крюком (гаком).
На самолете Су-27К также применяются:
• измененная механизация крыла (вместо флаперона используется двухсек-
ционный закрылок);
• специальное бортовое связное и навигационное оборудование, обеспечи-
вающее полеты над морем и посадку на палубу;
• система дозаправки топливом в воздухе с убирающейся штангой.
Первый полет на опытном образце корабельного истребителя (Т-10К-1)
выполнил в 1987 г. летчик-испытатель В. Г. Пугачев. Он же в 1989 г. на само-
лете Т-10К-2 совершил первую в истории советской авиации посадку "по-
самолетному" на палубу авианесущего крейсера "Тбилиси" (ныне ТАВКР
179
12*
"Адмирал Флота Советского Союза Кузнецов"). С 1989 г. самолет эксплуати-
руется на этом авианесущем крейсере [2.22].
Основные достижения, использованные и реализованные на самолете
Су-33 (рис. 2.4.8):
• интегральная аэродинамическая компоновка, выполненная по схеме
"триплан";
• переднее горизонтальное оперение как средство комплексного улучшения
аэродинамических свойств самолета, значительно расширяющее его ма-
невренные возможности;
• электродистанционная система управления по каналам тангажа, крепа и
рыскания, допускающая оптимальную статическую неустойчивость са-
молета;
• автоматически отклоняемая механизация передней кромки крыла для по-
лета по "огибающей поляр";
• развитая механизация задней кромки крыла, увеличивающая подъемную
силу на посадке в 1,5 раза для снижения посадочной скорости;
• автоматическая система ограничения допустимого угла атаки и предель-
ной перегрузки при пилотировании.
Рис. 2.4.8. Палубный истребитель Су-33
На самолете установлены два двигателя ТРДДФ АЛ-31 К (с тягой по
13 300 кг), отличающихся от АЛ-31Ф повышенной коррозийной стойкостью и
наличием особого форсажного режима.
В законцовке хвостовой балки под радиопрозрачным конусом располо-
жена станция радиоэлектронного противодействия "Береза", регистрирующая
облучение противником. Самолет оснащен когерентным импульсно-
доплеровским радиолокационным прицельным комплексом РЛПК-27 с даль-
ностью захвата воздушного объекта 80... 100 км. Он обеспечивает поиск и со-
провождение "на проходе" до 10 целей на фоне морской поверхности или су-
ши и может одновременно наводить две ракеты на разные цели.
180
Оптико-локационная прицельная станция ОЛС, имеющая дневной и ноч-
ной каналы пассивного обнаружения целей, связана с нашлемной системой
целеуказания НСЦ-27, облегчающей прицеливание в ближнем маневренном
бою при воздействии на летчика больших перегрузок. Датчик ОЛС смещен на
правый борт для улучшения обзора при дозаправке в воздухе и на этапе пред-
посадочного снижения.
Пилотажно-навигационный комплекс ПНК-10К включает систему авто-
матического управления с автоматом тяги и обеспечивает полет со счислени-
ем координат при коррекции от систем спутниковой и дальней навигации,
возвращение к кораблю и заход на посадку в автоматическом режиме по сиг-
налам системы "Резистор К-42", расположенной на корабле.
Система управления вооружением совместно с пилотажно-навигацион-
ным комплексом обеспечивает автоматическое и директорное наведение на
воздушную или морскую цель по командам с корабельного пункта наведения,
а также автоматический поиск и захват целей с формированием команд раз-
решения пуска управляемых ракет и последующий отворот.
Самолет Су-33 (Су-27К) оборудован системой управления групповыми
действиями истребителей, многоканальным комплексом связи и развитой
системой радиоэлектронного противодействия, в дополнение к встроенным
средствам которой на внешних узлах могут подвешиваться контейнеры
"Сорбция" или "Гардения". Все системы и бортовое радиоэлектронное обору-
дование самолета имеют высокую помехозащищенность, обеспечивающую их
работоспособность в жестких электромагнитных полях, генерируемых кора-
бельной электроникой.
Самолет Су-33 решает задачи перехвата и завоевания господства в возду-
хе в дальней и ближней морской зоне, обеспечивает боевые действия других
видов авиации МВФ. Он также может уничтожать противолодочные самоле-
ты, разведывательную авиацию и крылатые ракеты противника, проводить
постановку морских мин.
Принципиальным отличием истребителя Су-33 как авиационного боевого
комплекса от его прототипа - палубного самолета Су-27К является расшире-
ние возможностей решения ударных задач. Самолет Су-33 был продемонст-
рирован на Московском авиасалоне МАКС-97; в состав его вооружения по-
мимо ракет класса "воздух- воздух" включена противокорабельная ракета
ПКР ЗМ-80 "Москит", разработку которой ведет МКБ "Радуга" (дальность
пуска до 120 км). В связи со значительными размерами и массой ракеты
(4500 кг) предусмотрено вооружение Су-33 только одной ПКР "Москит", раз-
мещаемой на внешней подвеске между мотогондолами.
Кроме этого, в состав вооружения самолета Су-33 входят пушка ГШ-301
калибра 30 мм и до 10 управляемых ракет класса "воздух-воздух": ракеты
Р-27ЭР и Р-27ЭТ увеличенной дальности действия, ракеты среднего радиуса
действия Р-27Р и Р-27Т, ракеты ближнего маневренного боя Р-73.
Летно-технические характеристики самолета Су-33
Двигатели...................................... 2хАЛ-31К
Масса, кг:
максимальная взлетная............................ 33 000...39 500
боевой нагрузки.................................... 6500
Максимальная скорость полета, км/ч.................... 2300
Максимальное число М полета.................... 2,17
181
Максимальная эксплуатационная перегрузка................. 8
Практический потолок, км................................ 17
Тяговооруженность взлетная.............................. 1,0
Дальность полета, км................................... 3000
Тактический радиус действия, км................. > 1000
Время барражирования на удалении 250 км от корабля
с выполнением задач ПВО, ч......................... >2,5
Самолет Су-34
Самолет Су-34 (заводское обозначение Су-27ИБ) создан в фирме "ОКБ
Сухого" (главный конструктор Р.Г. Мартиросов), является двухместным ис-
требителем-бомбардировщиком, который должен заменить фронтовой бом-
бардировщик Су-24. Самолет изготавливается на Новосибирском авиацион-
ном заводе НЛПО; первый полет состоялся в Новосибирске в 1993 г. Его раз-
работка находится на стадии испытаний систем вооружения.
Кабина обеспечивает летчику и штурману хорошие условия взаимодейст-
вия в бою и повышенный комфорт, что важно для боевого самолета, рассчи-
танного на длительный полет с многократными дозаправками в воздухе. Чле-
ны экипажа располагаются рядом "плечом к плечу" (пилот слева, штурман-
оператор системы управления вооружением - справа). На этом самолете
впервые для такого класса машин реализована концепция комфортной каби-
ны. Ее компоновка позволяет членам экипажа поочередно покидать кресла и
занимать вертикальное положение в полный рост для отдыха. До высоты
10 000 м экипаж работает без кислородных масок.
У штурмана-оператора имеется полностью дублированное второе управ-
ление, что повышает боевую живучесть Су-34. Система активной безопасно-
сти обеспечивает уверенное выполнение фигур пилотажа у земли на макси-
мальной скорости (до 1400 км/ч) и надежный полет на предельно малых вы-
сотах со следованием рельефу местности. В конструкцию самолета Су-34
(рис. 2.4.9) по сравнению с Су-27 внесен ряд изменений:
• увеличен мидель носовой части фюзеляжа;
• установлено переднее горизонтальное оперение (ПГО) на продленных
корневых наплывах крыла;
• полностью перекомпонована кабина экипажа, вход в которую упрощен и
осуществляется по трапу через нишу передней опоры шасси;
• применен новый фонарь кабины;
• изменены опоры шасси и схема уборки;
• радиопрозрачный обтекатель БРЛС имеет боковые кромки, плавно пере-
ходящие в наплыв ПГО, что уменьшает, степень отражения радиолокаци-
онных сигналов;
• в кабине реализованы меры по защите экипажа от воздействия средств
поражения противника.
За счет размещения большого количества топлива в планере Су-34 может
пролететь без дозаправки до 4000 км. Имеется также стандартная система до-
заправки топлива в воздухе по типу Су-30, Су-33, Су-35. В кабине Су-34 уста-
новлены многофункциональные цветные индикаторы на электронно-лучевых
трубках, а также коллиматорный индикатор на лобовом стекле (ИЛС).
182
Рис. 2.4.9. Многофункциональный самолет Су-34
Самолет оснащен многорежимной бортовой РЛС (режимы работы "по
земле", "по воздуху", маловысотного полета и др.) с фазированной антенной
решеткой разработки НИИРЭК холдинговой компании "Ленинец" (г. Санкт-
Петербург). Заявленная дальность обнаружения воздушных целей БРЛС пре-
вышает 200 км. Самолет оснащается также РЛС заднего обзора.
Бортовая СУВ обеспечивает решение боевых задач с высокой степенью
автоматизации. Структура бортового комплекса является раздельно-
интегральной. Все информационные системы представлены в виде автоном-
ных блоков модульной конструкции. В их состав входят цифровые вычисли-
тели разработки НИИ "Аргон" и ряд программируемых процессоров. Управ-
ление системами комплекса бортового радиоэлектронного оборудования и
решение задач боевого применения осуществляется с помощью центральной
БЦВМ. Структура комплекса позволяет легко изменять его состав и модифи-
цировать подсистемы-модули.
Один из основных боевых режимов - скоростной полет на малой высоте с
огибанием рельефа местности. Для управления самолетом используется циф-
ровая многоканальная электродистанционная система. Самолет оснащен сис-
темой активной безопасности, которая предотвращает выход на опасные ре-
жимы и столкновение с землей в маловысотном полете. При этом контроли-
руется физическое состояние и действия экипажа, работа бортовых систем и
остаток топлива. Обеспечивается также автоматическое возвращение на аэро-
дром и заход на посадку.
Самолет Су-34 в отличие от Су-24 способен применять практически лю-
бое современное оружие класса "воздух-воздух" и благодаря этому может
осуществлять прикрытие объектов, вести маневренный воздушный бой и ре-
шать задачи противовоздушной обороны. Самолет Су-34 пользуется наи-
большим вниманием Министерства обороны России. Руководство ВВС в
1998 г. именно применительно к этому самолету впервые использовало тер-
мин "многофункциональный самолет".
На 12 узлах внешней подвески размещается вооружение самолета Су-34
общей массой до 8000 кг, в состав которого входят:
183
• три тактические крылатые ракеты Х-59М с телевизионным командным
наведением;
• управляемые ракеты класса "воздух-поверхность" - до шести ракет типа
Х-29, Х-25, Х-31А/П;
• управляемые ракеты класса "воздух-воздух" - до восьми ракет РВВ-АЕ.
до шести ракет Р-27 (Э) или Р-73;
• корректируемые авиационные бомбы - три КАБ-1500 или шесть КАБ-500;
• неуправляемое ракетно-бомбовое оружие - шесть блоков с НАР С-8 (120
ракет) или С-13 (30 ракет), а также шесть ракет С-25, 16 ФАБ-500, 22
ФАБ-250 или 34 бомбы ФАБ-100;
• встроенная пушка ГШ-301 калибра 30 мм с боекомплектом 180 снарядов.
Самолет Су-34 прямых зарубежных аналогов не имеет. Экспортный вари
ант самолета под названием Су-32ФН впервые был представлен в 1995 г. на
международном авиасалоне в Ле-Бурже, а также на авиасалоне МАКС-95 в
Москве. Самолет имеет значительный потенциал дальнейшего развития. Ве-
дутся работы по другим вариантам этого самолета - истребителю-бомбарди-
ровщику берегового базирования с бортовым радиотехническим комплексом
"Морской змей", самолету-разведчику и самолету РЭБ. В дальнейшем плани-
руется установить на самолете Су-34 двигатель нового поколения АЛ-41Ф.
На аэрокосмическом салоне "Фарнборо Интернэшнл-2000" самолет был
представлен под обозначением Су-32.
Летно-технические характеристики самолета Су-34 (Су-32)
Двигатели.......................................... 2хАЛ-31Ф
Масса взлетная, кг:
нормальная............................................ 42 000
максимальная...................................... 44 360
Максимальная скорость полета, км/ч:
у земли............................................ 1400
на высоте.......................................... 1900
Максимальное число М полета............................ 1,8
Тяговооруженность взлетная при нормальной массе.... 0,66
Дальность полета, км:
без дозаправки........................................ до 4000
при одной дозаправке.............................. до 7000
Масса боевой нагрузки, кг............................. 8000
Практический потолок, км .............................. 14
Максимальная перегрузка................................. 7
Самолет Су-35
Самолет Су-35, известный вначале под обозначением Су-27М, представ-
ляет собой модернизированный многоцелевой вариант истребителя-пере-
хватчика Су-27. Главный конструктор разработки Н. Ф. Никитин; самолет из-
готавливается на авиационном заводе КнААПО ( г. Комсомольск-на-Амуре).
Модернизация самолета Су-27 столь глубокая и многосторонняя, что в
итоге появился новый истребитель и новый авиационный комплекс — по уст-
ройству, оснащению, функциям и возможностям.
Прототип истребителя Су-35 был поднят в небо в 1985 г.; впервые само-
лет демонстрировался в 1992 г. в Белоруссии и на авиасалоне "Фарнборо-92".
184
Самолет Су-35 (рис. 2.4.10) является одноместным истребителем, имею-
щим интегральную аэродинамическую компоновку и выполненным по схеме
"триплан" с поворотным передним горизонтальным оперением. Все это
уменьшает балансировочное сопротивление самолета и значительно расширя-
ет его маневренные возможности. Степень собственной статической неустой-
чивости самолета в продольном канале составляет 20% САХ, в то время как
на исходном Су-27 она равна 5%. В этом отношении Су-35 не имеет себе рав-
ных в современной мировой авиации [2.14]. Требуемые показатели устойчи-
вости и управляемости обеспечиваются системой дистанционного управле-
ния. Переднее горизонтальное оперение облегчает управление самолетом на
больших углах атаки и приведение его к горизонтальному полету.
Рис. 2.4.10. Многофункциональный истребитель Су-35
Для Су-35 разработано новое крыло с увеличенной относительной тол-
щиной, которое вмещает в себя большое количество топлива. Как и на Су-27,
оно оборудовано механизацией в виде отклоняемых носков и флаперонов,
выполняющих функции закрылков и элеронов. При полете на дозвуковой ско-
рости кривизна профиля крыла изменяется системой дистанционного управ-
ления за счет отклонения носков и флаперонов в зависимости от угла атаки.
Конструкция самолета выполнена с использованием алюминиево-литие-
вых сплавов, широко применены конструкционные материалы. Силовая уста-
новка состоит из двух ТРДДФ АЛ-31ФМ (тяга 12 500 кг) с цифровой элек-
тронной системой управления; в дальнейшем Су-35 предполагается оснастить
усовершенствованным двигателем АЛ-35Ф с увеличенной до 14 000 кг тягой.
В килях самолета размещены дополнительные топливные баки. Самолет
оснащен убирающейся штангой-топливоприемником системы дозаправки в
воздухе.
Из основных отличий от серийного самолета Су-27 можно также отметить:
• применена цифровая система дистанционного управления в продольном,
поперечном и путевом каналах;
185
• в соответствии с оснащением новой СУВ изменены обводы носового ра-
диопрозрачного конуса й центральной хвостовой балки;
• в связи с увеличением максимальной взлетной массы усилено шасси; пе-
редняя опора шасси выполнена двухколесной;
• запас топлива увеличен до 10 250 кг за счет размещения в крыле и верти-
кальном оперении интегральных баков-отсеков.
Назначением многофункционального истребителя Су-35 является:
• перехват воздушных целей при автономных и полуавтономных боевых
действиях, в том числе групповых;
• ведение дальних ракетных воздушных боев и ближних маневренных боев
с любым воздушным противником;
• нанесение высокоточных ударов по воздушным и наземным целям на
большом удалении от линии фронта, в тылу противника;
• поражение надводных кораблей любых размеров;
• атака наземных и морских целей без захода в зону ПВО противника;
• ведение борьбы с самолетами ДРЛО, воздушными командными пунктами
и постановщиками активных помех.
Самолет оснащен новой системой управления вооружением, имеющей в
своем составе несколько БЦВМ, многофункциональную БРЛС и оптико-
электронную систему. Многорежимная помехозащищенная РЛС (с увеличен-
ным по сравнению с Су-27 диаметром антенны) имеет режимы работы по воз-
душным целям, картографирования земной поверхности, атаки наземных (над-
водных) целей, следования рельефу местности. БРЛС разработки НИИ прибо-
ростроения (г. Жуковский) имеет плоскую антенную решетку с электронным
сканированием по углу места и механическим - по азимуту. Эта РЛС одновре-
менно сопровождает до 15 воздушных целей и обеспечивает атаку не менее
шести из них одновременно. Оптико-электронный локатор обнаруживает с
задней полусферы воздушную цель оц = 19 м2 на дальности 90 км и обеспечи-
вает во взаимодействии с БРЛС пуск управляемых ракет на дальности 60 км.
Кабина самолета имеет комплексную систему отображения информации,
в состав которой входят три монохромных многофункциональных дисплея с
клавиатурой.
Вооружение истребителя Су-35, размещаемое на 12 внешних узлах,
включает широкий ассортимент оружия для действий по воздушным, назем-
ным и морским целям:
• управляемые ракеты класса "воздух - воздух" Р-27ЭР, Р-27ЭТ и РВВ-АЕ
с полуактивными, активными и инфракрасными ГСН;
• управляемые ракеты класса "воздух - поверхность" с телевизионным, те-
лекомандным, тепловизионным и лазерным наведением Х-25, Х-29 с
дальностями 20 ... 60 км, Х-59 с дальностями стрельбы 120 ... 200 км;
• противорадиолокационные управляемые ракеты Х-31П с дальностью
стрельбы 100 км, Х-58 с дальностями 120 ... 160 км;
• противокорабельные крылатые и аэробаллистические ракеты Х-31А (даль-
ность 70 км), Х-35 (дальность до 130 км), Х-15 (дальность 150 км) и др;
• авиабомбы, кассеты и НАР;
• встроенную пушку ГШ-301 калибра 30 мм.
186
Летно-технические характеристики самолета Су-35
Взлетная масса нормальная / максимальная, кг.. 25 700 / 34 000
Максимальная скорость, км/ч:
у земли....................................... 1400
на высоте.................................. 2440...2500
Максимальное число М полета 2,3... 2,35
Практический потолок, км........................... 18
Максимальная боевая нагрузка, кг ................ 8000
Максимальная эксплуатационная перегрузка...... 9
Двигатели..................................... 2хАЛ-35Ф
Стендовая тяга двигателя, кг.................. 14 000
Тяговооруженность взлетная.................... > 1
Дальность полета максимальная, км:
без ПТБ....................................... >4000
с одной дозаправкой........................ >6500
Самолет Су-37
Многофункциональный самолет Су-37 (рис.2.4.11) является результатом
дальнейшей модернизации Су-35. Создание многоцелевого сверхманевренно-
го истребителя Су-37 стало логической реализацией концепции создания так-
тических самолетов "поколения 4+" и шагом на пути к разработке программы
истребителя 5-го поколения. В этом самолете воплощены достижения научно-
технического прогресса в области аэродинамики, авиационных материалов,
двигателестроения и электроники конца 80 - начала 90-х годов. Как подчерк-
нул генеральный конструктор ОКБ им. П. О. Сухого М. П. Симонов, на вы-
ставке МАКС-97 в Москве, несмотря на внешнее сходство с истребителем
Су-35 по аэродинамической конфигурации и компоновке, новая машина по
составу бортового оборудования и возможностям представляет истребитель
качественно нового уровня.
Самолет Су-37 с двигателями, оснащенными поворотными соплами, пер-
вый раз поднял в воздух в 1996 г. летчик-испытатель "ОКБ Сухого" Герой
России Е. И. Фролов. В последующих полетах он выполнил "сальто", "управ-
ляемый штопор" и другие фигуры, недоступные пока ни одному самолету
мира. В том же 1996 г. самолет демонстрировался на выставке "Фарнборо-96"
и "Сеул Эйршоу-96". Возможности и характеристики самолета были широко
представлены на выставке МАКС-97 в Москве [2.21].
Самолет Су-37 разработан в "ОКБ Сухого" (главный конструктор
В. С. Конохов), изготавливается в Комсомольске-на-Амуре на авиазаводе
КнААПО.
На истребителе Су-37 впервые отработаны новые маневры, связанные с
выходом на сверхбольшие углы атаки и околонулевые скорости, в частности:
• разворот в плоскости тангажа на 360° ("чакра Фролова");
• фиксированный (за время менее 10 с) боевой разворот;
• поворот на вертикали;
• "кобра Пугачева" с углами атаки 150 ... 180°;
• разворот на "кобре";
• переворот на "колоколе".
187
Рис. 2.4.11. Многофункциональный свсрхмансврснный истребитель Су-37
Демонстрация ряда новых фигур высшего пилотажа (рис. 2.4.12), выпол-
нение которых обеспечено наличием системы управления вектором тяги, по-
зволила зарубежным специалистам выделить летно-технические возможно-
сти, совершенствующие ведение ближнего воздушного боя:
• снижение минимальных скоростей устойчивого маневренного полета
до 70 км/ч;
• реализация пауз продолжительностью 3...4 с в траекторном движении
самолета.
Показ этих и других возможностей заставил специалистов говорить о соз-
дании сверхманевренного самолета-истребителя как о свершившемся факте.
Самолет Су-37 - первый в мире боевой самолет горизонтального взлета и
посадки, оснащенный системой управления вектором тяги (УВТ) [2.21]. Усо-
вершенствованные двигатели АЛ-31ФП с УВТ разработаны АО "А. Люлька-
Сатурн" под руководством генерального конструктора В. М. Чепкина. Осе-
симметричное поворотное сопло двигателя отклоняется в плоскости тангажа
на ±15°. При создании этого ТРДДФ реализован ряд научно-технических ре-
шений, полученных в ходе разработки двигателя 5-го поколения АЛ-41Ф, в
том числе:
• применение новой монокристаллической лопатки турбины;
• использование сопел двигателей, способных раздельно отклоняться в
вертикальной плоскости, что обеспечивает управление самолетом как по
тангажу, так по крену и рысканию.
Цифровая система дистанционного управления с четырехкратным резер-
вированием в продольном канале и трехкратным в каналах бокового движения
обеспечивает автоматизированное управление всеми рулевыми поверхностями,
а также отклонение вектора тяги каждого двигателя посредством перемещения
летчиком боковой ручки управления самолетом (РУС). При любых маневрах
безопасность полета достигается автоматическим ограничением перегрузок в
188
зависимости от текущей массы и режимов полета; реализован автоматический
вывод из "штопора". Рукоятка управления двигателями обеспечивает пропор-
циональность тяги приложенному к ней усилию летчика.
К отличительным особенностям боевых действий самолета Су-37 можно
отнести:
• использование сверхманевренности и новых видов фигур высшего пило-
тажа в ближнем воздушном бою;
• многоканальность бортовых информационных и прицельных систем;
• проведение атаки наземных целей;
• маловысотный полет с обходом препятствий и облетом местности;
• противодействие радиоэлектронным и оптико-электронным средствам
противника;
• автоматизация всех этапов полета и боевого применения;
• ведение борьбы с самолётами ДРЛО и РЭБ, а также с воздушными КП.
Рис. 2.4.12. Новые маневры, выполняемые на истребителе Су-37:
а - петля на малой скорости; б - поворот на "кобре"; в - "чакра Фролова'
189
На этом самолете реализованы последние достижения отечественной ра-
диоэлектроники и приборостроения:
• применяется цифровая электродистанционная система управления (СДУ)
полетом в трех каналах пилотирования, разработанная МНПК "Авиони-
ка" (главный конструктор В.М. Петров);
• самолет оснащен новой многофункциональной БРЛС Н-011М разработки
НИИ приборостроения (главный конструктор Т. О. Бекирбаев) с фазиро-
ванной антенной решеткой, скомплексированной с РЛС заднего обзора;
• применяется комбинированная навигационная система, использующая
лазерные гироскопы и приемники спутниковой системы навигации, раз-
работки РПКБ г. Раменское (главный конструктор Г. И. Джанджгава);
• реализовано новое индикационно-управляющее поле кабины с использова-
нием цветных многофункциональных экранных индикаторов и широко-
угольного коллиматорного авиационного индикатора КАИ на лобовом
стекле;
• управление истребителем осуществляется боковой ручкой и (впервые в
мире на истребителе) тензометрическим РУД, разработанными в МНПК
"Авионика".
В состав специального бортового радиоэлектронного оборудования само-
лета Су-37 (рис. 2.4.13) входит модернизированная цифровая система управ-
ления вооружением (СУВ), которая обеспечивает высокую боевую эффектив-
ность действий по всем современным и перспективным воздушным и назем-
ным целям (включая низколетящие стратегические крылатые ракеты).
Бортовая СУВ включает в себя два основных информационных канала
(радиолокационный и тепловой), реализуемых с помощью подсистем:
• радиолокационная система управления РЛСУ в составе радиолокацион-
ного прицельного комплекса РЛПК, двух БЦВМ и пульта управления;
основу РЛСУ составляют БРЛС переднего и заднего обзора;
• оптико-электронный прицельно-навигационный комплекс ОЭПрНК, в
который входят система отображения информации СОИ, оптико-локаци-
онная станция ОЛС, пилотажно-навигационный комплекс ПИК, система
управления оружием СУО, нашлемная система целеуказания НСЦ, бор-
товая ЦВМ комплекса ОЭПрНК, пульт управления многофункциональ-
ный ПУМФ.
Цифровая многорежимная БРЛС дальнего действия обеспечивает одно-
временное сопровождение до 20 воздушных целей и одновременный пуск ра-
кет класса "воздух - воздух" с активными ГСН по восьми целям. БРЛС пе-
реднего обзора обнаруживает воздушные цели с ЭПР Зм2 на дальности
140... 160 км с передней и 30...50 км с задней полусферы цели. Возможность
ведения радиолокационного обзора в задней полусфере с предупреждением об
угрозе в ЗПС истребителя реализована на Су-37 впервые в мире, что делает его
практически неуязвимым для средств поражения, атакующих со стороны ЗПС.
Дальность обнаружения наземных целей с ЭПР, равной 3000 м2, составляет
130... 170 км. Зона обзора БРЛС в передней полусфере равна ± 90° по азимуту
и ±55° по углу места. БРЛС заднего обзора обеспечивает обзор по азимуту и
углу места в пределах ± 60°.
190
Оптико-электронный прицельно-навнгацнонный комплекс (ОЭПрНК)
Комплекс радиоэлектронного противодействия (КРЭП)
Станция радиотехнической
разведки (СРТР)
Система активных
помех (САП)
Система
взаимной
групповой
защиты
' I ..
Рис. 2.4.13. Специальное бортовое радиоэлектронное оборудование перспективного
многофункционального истребителя
191
При работе по поверхности БРЛС имеет несколько режимов обзора - кар-
тографирование, поиск и слежение за подвижными наземными целями, обход
препятствий в маловысотном полете.
Оптико-локационная станция имеет зону действия ±60° по азимуту и
+60...-15° по углу места.
Пилотажно-навигационный комплекс ПИК-1 ОМ-711 (разрабатываемый
МНПК "Авионика") обеспечивает функции навигации, ручного и автоматиче-
ского пилотирования от взлета до посадки днем и ночью на любых географи-
ческих широтах.
Отметим основные функции, выполняемые пилотажно-навигационным
комплексом:
• автоматическое определение счисленных координат местонахождения и
их уточнение от различных корректирующих средств;
• программирование маршрута и автоматический полет по нему;
• оперативный ввод маршрута полета на земле с аппаратуры ввода инфор-
мации;
• решение задачи и выдача на индикацию располагаемого времени и рас-
полагаемой дальности полета по информации о расходе топлива, а также
времени и дальности до очередного ППМ;
• автоматический полет в режимах маршрута, возвращения, захода на по-
садку; автоматизация управления на боевых режимах полета от внешних
АСУ и от бортовой системы управления вооружением;
• вычисление предельно-допустимых параметров пилотирования самолета
и формирование сигналов ограничений с целью предотвращения выхода
на опасный режим полета с использованием информации о запасе топли-
ва, внешней конфигурации и др.
Летно-технические характеристики самолета Су-37
Двигатели........................... 2хАЛ-31ФП(ФУ)
Стендовая тяга двигателя, кг.............. 14 000
Взлетная масса, кг:
максимальная.............................. 34 000
нормальная............................. 25 670
Максимальная скорость, км/ч:
у земли................................ 1400
на высоте.............................. 2500
Максимальное число М полета................ 2,35
Практический потолок, км.................... 18
Максимальная перегрузка...................... 9
Боевая нагрузка, кг:
нормальная........................... 1400
максимальная........................... 8200
Возможности нового бортового комплекса обороны КРЭП Су-37 сущест-
венно расширены по сравнению с самолетом Су-27. В нем используются: стан-
ция электронной разведки; автомат сброса дипольных отражателей и ИК-
ловушек; приемник системы предупреждения о радиолокационной подсветке
противником; станция ИК-разведки; система взаимной групповой защиты и др.
Самолет Су-37 оснащается оружием классов "воздух-воздух" и "воздух-
поверхность", размещаемым на 12 узлах подвески. Номенклатура вооружения
самолета Су-37 полностью повторяет состав вооружения Су-35, приведенный
выше.
192
2.5. Создание и развитие ракет класса
"воздух - воздух" истребителей-перехватчиков’
На протяжении сорока лет параллельно тому, как создавались специали-
зированные истребители для задач перехвата, разрабатывалось ракетное воо-
ружение. Так, исключительно для перехватчиков были созданы ракеты класса
"воздух-воздух" РС-2-УС, Р-55, Р-8М, Р-98, Р-98М, Р-4, Р-4М, Р-40, Р-40Д,
Р-33, К-37. Практически все ракеты, разработанные для фронтовых истреби-
телей, без каких бы то ни было изменений применялись на перехватчиках.
Это Р-ЗС, Р-ЗР, Р-13М, Р-23, Р-24, Р-24М, Р-60, Р-60М, Р-73, Р-27(Э). Приня-
тая на вооружение ракета Р-77 также будет применяться на перехватчиках.
РС-2-УС
Р-13М
Рис. 2.5.1. Ракеты класса "воздух - воздух" малой дальности
* В написании подразд. 2.5 принимал участие Л. Г. Черных
13-4094
193
Общий вид ракет малой и средней дальности, применявшихся на истре-
бителях и перехватчиках 2-го и 3-го поколений, приведен на рис. 2.5.1, 2.5.2
соответственно.
Р-23Р
Рис. 2.5.2. Ракеты класса "воздух - воздух" средней дальности
194
В отечественной и мировой практике условно принято деление ракет
класса "воздух-воздух" на ракеты малой (РМД), средней (РСД) и большой
(РБД) дальности пуска [2.2, 2.23]. Основные характеристики российских ра-
кет, составленные в соответствии с этим делением, приведены в табл. 2.5.1,
2.5.2, 2.5.3, а также в табл. 3.2.1 и 3.2.2.
Ограниченные по системе наведения максимальные дальности пуска
в таблицах приведены для радиолокационных головок самонаведения
(РГС) при цели типа истребитель; для инфракрасных головок самонаведения
(ИГС) при цели типа F-15, режиме работы двигателя "максимал", V,, ~ 0,8М,
Нц = 5 км, ракурсе в передней полусфере (ППС) q до 30°.
2.5.1. Ракеты малой дальности и ближнего маневренного боя
Первой отечественной РМД, нашедшей применение в авиации ПВО, была
ракета К-5 (РС-1-У). Более известна ее модернизация К-5МС (РС-2-УС).
Ракета наводилась по радиолучу (методу "трех точек" или "трехточки") и
обеспечивала поражение слабо маневрирующих целей при атаке из задней
полусферы (ЗПС) при ограниченных ракурсах подхода. Для уменьшения кри-
визны траектории ракеты после пуска и ввода ее в луч самолет-носитель пе-
реходил на траекторию параллельного сближения с целью. Хвостовой прием-
ник формировал сигналы, пропорциональные отклонению ракеты от равно-
сигнального направления диаграммы направленности антенны БРЛС,
сопровождающей цель. Для привязки принятой информации к каналам
управления ракета с помощью свободного гироскопа и элеронов стабилизи-
ровалась по крену. Качество процесса удержания ракеты на линии носитель-
цель определялось соответствующим подбором коэффициента усиления от
указанного отклонения до перегрузки ракеты и наличием низкочастотной
дифференцирующей составляющей в передаточной функции контура стаби-
лизации от заданной до реализованной перегрузки. Ограниченность зон воз-
можных пусков (ЗВП), а также жесткие ограничения на маневрирование но-
сителя в процессе наведения ракеты заставили в дальнейшем отказаться от
наведения по радиолучу.
Значительное расширение возможностей перехвата целей из ЗПС было
достигнуто благодаря оснащению ракеты ИГС.
Ракета Р-55, использовавшая основные конструктивные решения ракеты
РС-2-УС, за счет применения ИГС несколько расширила ЗВП и позволила ис-
требителю с момента пуска маневрировать произвольно. Некоторое снижение
ее максимальной дальности пуска связано с ростом лобового сопротивления
из-за применения полусферического обтекателя ИГС, необходимого для ис-
ключения пеленгационных ошибок (искажений углового положения цели,
возникающих при прохождении луча через обтекатель).
В 1957 г. начались работы по воспроизведению образца американской
РМД AIM-9B "Сайдуиндер". Ракета К-13 (Р-ЗС после запуска в серию) яви-
лась родоначальником семейства Р-ЗС, Р-ЗР, Р-13М, Р-13М1. Эта линия до-
минировала до начала 70-х годов, когда на вооружение была принята ракета
Р-60.
195
13"
Тактико-технические характеристики ракет малой дальности
Таблица 2.5.1
Параметры РС-2-УС Р-55 Р-ЗС Р-ЗР P-I3M (Р-13М1)
Разработчик ЦКБ "Алмаз" ПКО "Стрела" ММ3 "Вымпел"
Год принятия на вооружение 1959 (серия) 1967 (серия) 1962 1967 (серия) 1973 (1977 - серия)
Самолеты- носители / боекомплект МиГ-17ПФУ/4 МиГ-19ПФ/4 МиГ-21ПФ/4 Су-9/4 Су-11/4 Су-15/4 Су-9/4 Су-11/4 Су-15/4 МиГ-21СМ/4 МиГ-21бис/6 МиГ-19/2 МиГ-21/2 МиГ-23/4 Як-28/4 МиГ-21С/2 МиГ-21СМ/4 МиГ-23/4 МиГ-21бис/4 МиГ-23М/4 МиГ-23МЛ/4 МиГ-23МЛА/4 МиГ-23П/4
Бортовая РЛС, прицельная система РП-1;РП-9У цц-зо "Сапфир-21" РП-9У "Сапфир-21" АСП-ПФД РП-9У "Сапфир-21" "Квант" "Сапфир-21" "Сапфир-21" "Сапфир-23М” "Сапфир-23МЛА" АСП-ПФЦ АСП-17МЛ
Аэродинами- ческая схема “Утка” с элеронами "Утка” с роллеронами
Масса, кг 82,6 91 75,8 82 88(90)
Масса БЧ, кг 13 12 11,3 11.3 н,з
ТипБЧ Осколочно-фугасная Стержневая
Диаметр корпуса, м 0,2 0,127
Длина, м 2,50 2,70 2,84 3,42 2,87 (2,98)
Размах оперения, м 0.59 0,64 0,53 0,53 0,63 (0,59)
Энерговооружен- ность, кг - с/ кг 45 40 50 45 67
Время управля- емого полета, с 35 35 21 21 60
Тип двигателя РДТТ однорежимный с боковыми соплами РДТТ однорежимный
Организация це- леуказания головке - Наведение носителя по погоне в ЗПС фщ=0 Наведение носителя по погоне в ЗПС фцу— 0 (фцу— ± 12°)
Тип системы на- ведения Радиокоманд- ная по лучу иге неохлаждаемая ПАРГС ИГС, охлаждаемая азотом
Метод наведения Трехточка Пропорциональное наведение
Максимальная скорость цели, км/ч 1600 1600 1800 1800 2500
Диапазон высот поражения пели, км 0,8...20 0,2...22 0,2...21 1...20 0,05...25
Максимальная дальность пуска, км, ППС / ЗПС -/5 -/10 -/7 -/9 -/15
Минимальная дальность пуска, км, ЗПС 1,9 1,2 1,0 1,0 0,3
Перегрузка перехватываемой цели 1,5...2 3 3 2 7(8)
196
В ракете "Сайдуиндер" были заложены, а в ракетах семейства К-13 вос-
произведены оригинальные технические решения, позволившие отказаться от
использования автопилотных датчиков линейного ускорения и угловой ско-
рости.
Наиболее характерной особенностью облика этих ракет явились малый
диаметр (127 мм) и большое относительное удлинение корпуса (более 20).
Ракета за счет предельного смещения крыльев назад обладает высокой
собственной устойчивостью; рули, максимально смещенные вперед, эффек-
тивны, причем выбором положения осей вращения обеспечена их высокая
статическая устойчивость под действием шарнирного момента; рулевой при-
вод не имеет обратной связи по отклонению руля и реагирует моментом на
команду. Благодаря шарнирному моменту, сдерживающему отклонение рулей
под действием команды, угол атаки ракеты оказывается обратно пропорцио-
нальным скоростному напору, а перегрузка - соответствующей команде неза-
висимо от условий полета.
Естественно, что приведенные рассуждения приблизительны, так как на
зависимость перегрузки от команды влияют центровка ракеты, сильно меняю-
щаяся по мере выгорания топлива, число М, определяющее моментные харак-
теристики, угол атаки, влияющий на эффективность рулей. Тем не менее ха-
рактеристики такого контура стабилизации, охваченного обратной связью по
шарнирному моменту, оказались приемлемыми в достаточно широком диапа-
зоне условий.
Чрезвычайно эффективным оказалось применение так называемых рол-
леронов- рулевых поверхностей с встроенными маховиками-гироскопами,
раскручиваемыми от набегающего потока и создающими искусственное
демпфирование ракеты (относительно продольной оси для ракет Р-ЗС, Р-ЗР,
относительно всех трех осей для Р-13М и Р-13М1).
Рулевой привод ракет выполнен на горячем газе с регулятором типа со-
пло-заслонка. Ракетный двигатель твердого топлива (РДТТ) имеет монобло-
ковый пороховой заряд с звездообразным каналом, обеспечивающим большое
отношение поверхности горения к площади проходного сечения для порохо-
вых газов.
На ракетах Р-13М и Р-13М1 используются охлаждаемые азотом ИГС. На
ракете Р-ЗС головная часть имеет форму полусферы, на последующих вход-
ной зрачок ИГС существенно меньше миделя ракеты, поэтому головная часть
имеет оживальную форму с полусферой на носике.
Ракеты Р-ЗС и Р-13М осуществляют захват цели только при сопряжении
продольной оси ракеты и направления на цель с точностью 1,25°, что требует
соответствующего управления самолетом-носителем. Ракета Р-13Р оснащена
импульсной полуактивной головкой с коническим сканированием диаграммы
направленности. Поле захвата составляет свыше 10°, что несколько облегчает
пилотирование.
Главным достоинством ракеты Р-13Р является ее всепогодность; на ма-
лых высотах из-за отражений от подстилающей поверхности ее возможности
ограничены.
В состав условий, разрешающих пуск ракет семейства К-13, наряду с за-
хватом цели ИГС входят ограничения по дальности и текущей перегрузке но-
сителя. Смысл ограничения по дальности совпадает с принятым для всех ра-
197
кет класса "воздух-воздух": D < Dpn (D- текущая дальность носитель-цель;
Dpil - вычисленная в соответствии с характеристиками ракеты и условиями
применения дальность разрешения пуска).
Самолет-носитель, выполняющий наведение по погоне (совмещающий
продольную ось ракеты с направлением на цель), маневрирует с тем большей
перегрузкой, чем больше ракурс цели, а следовательно, и ошибка прицелива-
ния. При фиксированном ракурсе перегрузка носителя растет по мере умень-
шения дальности. Ограничение текущей перегрузки самолета-носителя, при
которой еще разрешается пуск, используется в качестве боковой границы зоны.
Ракета Р-13М1 имеет ограниченную возможность приема целеуказания
по пеленгу (± 12°). Это несколько облегчает пилотирование истребителя перед
пуском.
В принципе после захвата и разарретирования ИГС самолет-носитель
может построить упреждение и пустить ракету при допустимых ошибках
прицеливания, имея в момент пуска существенно большие перегрузки, огра-
ниченные только безопасностью отделения ракеты.
На основании опыта учений и реальных воздушных боев в Индокитае в
середине 60-х годов были выдвинуты требования поражения противника в
ближнем высокоманевренном воздушном бою при пуске ракеты с большими
ошибками прицеливания, в том числе и на малых дальностях (~ 300 м).
Впервые такой ракетой, причем имеющей вдвое меньшую массу, чем по-
следующие аналоги, стала ракета Р-60, в которой была применена неохлаж-
даемая ИГС, имеющая угол прокачки координатора ±45°, угол целеуказания
±12° и угловую скорость слежения до 30 град/с.
На ракете Р-60М была применена ИГС с термодинамическим охлаждени-
ем; она принимает целеуказание в пределах углов прокачки и имеет мгновен-
ное поле захвата ±2,5°. На ракете в основных каналах используется автопилот
классической схемы с обратными связями по угловой скорости и перегрузке и
приводом на горячем газе. Важнейшим фактором, позволившим использовать
на ракете ближнего маневренного боя столь малую боевую часть, явилась оп-
тимизация системы наведения в расчете на наихудшее поведение цели.
Достигнутые к этому времени точность измерения координат цели ИГС и
характеристики контура стабилизации позволили обеспечить такое быстро-
действие системы управления от угловой скорости линии визирвания до пере-
грузки ракеты, при котором цель, маневрирующая с перегрузкой до 6, не спо-
собна изменением ее величины и направления уйти от поражения.
Ракета Р-60М способна атаковать цель на встречно-пересекающихся
курсах.
Зарубежный аналог ракеты Р-60 Мк.1 "Мажик" (Франция), принятый на
вооружение в 1975 г., обладал сходными тактико-техническими характери-
стиками, однако французская ракета имела вдвое большую начальную массу.
Требование поражения целей ракетой малой дальности при атаке из ППС
было впервые выполнено в середине 70-х годов с принятием на вооружение в
США ракеты AIM-9L "Сайдуиндер".
Отечественной ракетой ближнего маневренного боя, удовлетворяющей
этому требованию, стала созданная в 1983 г. ракета Р-73. До настоящего вре-
мени Р-73 остается лучшей в мире ракетой этого типа. Построенная по схеме
"утка" с элеронами ракета оснащена всеракурсной ИГС с углами прокачки
198
координатора ±60°, возможностью принятия целеуказания ±45°, высокой по-
мехозащищенностью.
В ракете применена система управления вектором тяги, в которой в каче-
стве рабочих органов используются интерцепторы. Благодаря газодинамиче-
скому управлению на активном участке полета ракеты (~ 5 с), она выводится
на большие углы атаки (до 40°), что обеспечивает энергичный разворот век-
тора скорости для исправления начальной ошибки пуска.
В маневренном воздушном бою при атаке цели под ракурсом 90° на вы-
соте 1 км при ошибке пуска 40° и маневре цели с перегрузкой 8 в сторону
увеличения пролета ближняя граница ЗВП составляет 0,6 км. В этих же усло-
виях ближняя граница для ракеты AIM-9L "Сайдуиндер" составляет 1,5 км.
2.5.2. Ракеты средней дальности
Первой отечественной самонаводящейся ракетой, принятой на вооруже-
ние, была ракета средней дальности Р-8М (табл. 2.5.2). Ракета построена по
схеме "утка" с элеронами, оснащена модульными головками самонаведения
(импульсной полуактивной радиолокационной и пассивной инфракрасной),
автопилотом и радиовзрывателем. Ракета обеспечивала атаку цели в ЗПС на
ракурсах 0 4- 3/4 при прямом прицеливании и пуске с упреждением.
При модернизации (ракета Р-8М1) на ракете установлен новый автопи-
лот, в котором предусмотрена настройка параметров на два диапазона высот:
0,5...8 и 8...23 км, а также модернизированная ГСН.
Дальнейшее продолжение линии Р-8М - ракеты средней дальности Р-98 и
Р-98М - обеспечивают поражение цели в ЗПС и ППС с целеуказанием до ±60°
в случае РГС и ±30° в случае ИГС.
В РГС ПАРГ-15 ракеты Р-98 введена обращенная к земле компенсацион-
ная антенна для улучшения соотношения сигнал - фон и повышения дально-
сти действия на малых высотах. Это потребовало стабилизации ракеты по
крену в схеме X независимо от крена самолета в момент пуска.
Существенно большие возможности по дальности пуска и предельным
превышениям цели до 5...6 км были достигнуты в ракете Р-4 (К-80) и до 7...8
км в ракете Р-4М (К-80М). Диапазон высот поражаемых целей ракеты Р-4М
составил 0,5...21 км. В отличие от предшествующих разработок РСД ракеты
Р-4 и Р-4М были построены по нормальной схеме.
РГС упомянутых выше ракет использовали для измерения углового рас-
согласования метод конического сканирования. Достоинство этого метода-
простота построения, однако этот метод не защищен от легко создаваемых
совмещенных с целью амплитудных помех. При известной противнику часто-
те сканирования амплитудная помеха выбивает головку из режима слежения.
Отрицательное воздействие на помехозащищенность РГС оказывало связан-
ное с применением конического сканирования использование автоматическо-
го регулирования усиления (АРУ).
Случайный разброс частот сканирования требует использования ампли-
тудной модуляции помехи спектром. При этом, естественно, падает воздейст-
вие помехи, срывов слежения не происходит, однако вызванные ею пролеты
недопустимо велики. Для повышения помехозащищенности в РГС вводилась
199
случайная от экземпляра к экземпляру частота сканирования (ПАРГ-15). Это
должно было заставить противника расширить спектр модулирующего сигна-
ла и тем самым снизить уровень спектральной плотности воздействия, опре-
деляющего дисперсию пролета.
В РГС ПАРГ-10ВВ (ракеты Р-4М) коническое сканирование организова-
но электронным переключением положения луча относительно оптической
оси антенны по случайному закону.
Все эти решения оказались малоперспективными и в более поздних раз-
работках, внедрявшихся с начала 70-х годов, не использовались.
Таблица 2.5.2
Тактико-технические характеристики ракет средней дальности
Параметры Р-8М (Р-8М1] Р-98 (Р-98М) Р-4 (Р-4М)
Разработчик НПО "Молния"
Г од принятии иа вооружение 1961 (1963) 1965 (1975) 1965 (1973)
Самолеты-носители / боекомплект Су-11/2 Су-15/2 Як-28П / 2 Ту-128/4
Бортовая РЛС, прицельная система "Орел-Д" "Тайфун-М" "Смерч”
Аэродинамическая схема "Утка" с элеронами Нормальная
Масса, кг 275 292 (301) 492 (500)
Масса БЧ, кг 40 40 (39) 53
ТипБЧ Осколочная Осколочно-фугасная
Диаметр корпуса, м 0,275 0,315
Длина, м 3,98 4,17(4 22) 5,36
Размах опереиин, м 1,22 1,5
Энерговооруженность, кг с / кг 65 66 50
Тип топлива РНДСИ-5К РНДСИ-5К (РАМ-ЮК) РНДСИ-5К
баллиститное баллиститное баллиститное
РГС cpuv = ± 60° фот = ±60°
Целеуказание головке <Рцу = ±30° фцу = ±53"
Тип системы Самонаведение с захватом цели ПАРГС в подвесе.
Наведении ИГС с охлаждением азотом
Метод наведения Пропорциональное наведение
Максимальная скорость цели, км/ч 2000 (2500)
Диапа он высот поражения цели, км 0.5...23 0,5...23 8...21,5
(0,5...24) (0,5...21)
Максимальная дальность пуска, км, -/12 18/14 20/13
ППС/ЗПС (-/14) (24/14) (25/13)
Мииимальиаи дальность пуска, км, 2,0 1,8 3,0
ЗПС (0,3) (2,2)
Перегрузка перехватываемой цели 2,0 2,0 2,0 (2,5)
200
Последней импульсной РГС отечественных ракет средней дальности бы-
ла ПАРГ-12ВВ ракеты Р-40. Эта головка отличается тем, что в ней впервые
использовался моноимпульсный метод измерения углового рассогласования,
при котором воздействие амплитудных помех максимально ослаблено. При-
менение логарифмических приемников исключило опасность "ослепления"
головки, свойственного головкам с АРУ при значительных перепадах мощно-
сти помехи. Неодинаковость логарифмических приемников вызывала возник-
новение колебаний на выходе угломера при так называемой череспериодной
помехе. Это воздействие удалось значительно ослабить благодаря коммута-
ции приемников по случайному закону.
Головка ПАРГ-12ВВ обладает развитой логикой и высокой защищенно-
стью от совмещенных с целью помех. Для формирования четырехлепестковой
диаграммы направленности, необходимой для организации моноимпульсной
обработки, а также обеспечения максимальных (до 70°) отклонений равносиг-
нального направления в РГС ПАРГ-12 применена двухзеркальная антенна
Кассегрена. Подвижное зеркало антенны облучается потоком, неподвижным
относительно ракеты. При этом равносигнальное направление диаграммы на-
правленности поворачивается на удвоенный угол отворота зеркала.
В РГС на базе синусно-косинусного вращающегося трансформатора был
создан вычислитель, преобразующий заданные перегрузки в . связанную сис-
тему координат с учетом разгона и торможения ракеты. Это позволило по-
строить наведение по методу пропорциональной навигации в антенной сис-
теме координат, когда проекция полной перегрузки ракеты на плоскость, пер-
пендикулярную линии дальности, пропорциональна произведению оценки
угловой скорости линии дальности на скорость сближения.
Заданное ускорение ракеты в плоскости, перпендикулярной ее продоль-
ной оси, Jf при этом формируется таким образом, чтобы выполнялось век-
торное равенство
J± + Г Ха° = Jf + JxU
где г Ха - вектор, направленный вдоль оси Ха; J± - заданное ускорение в ан-
тенной системе координат.
Величина оценки угловой скорости линии визирования о) используется
для формирования заданного ускорения по формулам:
J\a = ^00^
Jyi = tg^r tg^z + Ai tg^z —-—;
cos#>. cos^r
^zl = za J x\ v >
cos#\.
обеспечивающим компенсацию продольного ускорения ракеты J хХ.
201
Здесь J, J za - заданные ускорения в антенной системе координат;
Roo - скорость сближения; J*,, J*zX - заданные ускорения в связанной сис-
теме координат; (ру, (pz - углы отклонения антенны ГСН.
Рекордные пеленги сопровождаемой цели и наведение в антенной сис-
теме координат сделали возможным перехват скоростной цели при больших
ракурсах.
При разработке системы управления ракеты Р-40 для ограничения пере-
грузки использована так называемая система переменной структуры, сопос-
тавляющая с заданным порогом сумму текущей перегрузки и ее производных
и при превышении порога обнуляющая команду.
В связи с разработкой ракеты Р-40 с РГС существенно обострился вопрос
о синхронных ошибках обтекателя и антенной системы. Упомянутая выше
антенна Кассегрена оказалась весьма нестабильной по величине пеленгаци-
онной ошибки, градиент которой по пеленгу ограничивает высотность раке-
ты. Для контроля синхронных ошибок головок в производстве была разрабо-
тана система измерений, основанная на использовании прокачного стенда, на
который устанавливается головка, и корреляционного алгоритма выделения
ее реакции на колебания основания. Внедрение этой системы способствовало
совершенствованию антенных систем и обтекателей ракет средней дальности.
В ИГС ракеты Р-40 применены принципы обработки сигнала, обеспечи-
вающие высокую степень защиты от ложных тепловых помех. ИГС принима-
ет целеуказание в пределах ±55°.
Чрезвычайно интересна компоновка ракеты Р-40 (табл. 2.5.3) и конструк-
тивные решения, принятые при ее разработке.
Двигатель размещен вблизи центра масс. Это делает несущественной раз-
бежку центровки, что облегчает формирование контура стабилизации на
старте и на пассивном участке полета ракеты. Двигатель имеет два сопла, раз-
вернутых вдоль корпуса для создания продольной тяги. За счет разноса дис-
танционного взрывателя и боевой части почти на всю длину ракеты упрости-
лась задача выбора задержек для обеспечения высокой эффективности боево-
го снаряжения.
Для защиты аппаратуры и боевой части от кинетического нагрева и обте-
кающих кормовую часть ракеты продуктов сгорания топлива в ракете исполь-
зуется охлаждение аппаратуры фреоном с борта самолета-носителя и тепло-
изоляция внутренней поверхности корпуса. В качестве конструкционного ма-
териала корпуса ракеты был выбран титановый сплав ВТ-4.
Ракета Р-40 разрабатывалась как высотная с наивысшим среди ракет
класса "воздух-воздух" значением минимальной нагрузки на крыло. Это по-
зволило обеспечить максимальную высоту перехватываемой цели до
27...30 км.
Ракета Р-23 построена по нормальной схеме с дестабилизаторами, распо-
ложенными на корпусе головки самонаведенния. Размеры и положение деста-
билизаторов зависят от формы и массы головки таким образом, чтобы сохра-
нить неизменными моментные характеристики ракеты.
202
Тактико-технические характеристики ракет средней дальности
Таблица 2.5.3
Параметры Р-40 Р-40Д Р-23 Р-24 (Р-24М)
Разработчик ГосМКБ" Вымпел"
Год принятия на вооружение 1969 (серия) 1980 1973 1981 (1988)
Самолеты- носители / боекомплект Бортовая РЛС, МиГ-25 / 4 МиГ-29 ПД / 4 МиГ-23 / 2; МиГ-23МЛ / 2; МиГ-23МЛД / 2; "Сапфир-23" МиГ-23МЛ / 2 . МиГ-23МЛД / 2; МиГ-23П/2; "Сапфир-23МЛ"
прицельная система "Смерч-А" "Сапфир-25" "Сапфир-23МЛД" ТП-23; ТП-23М "Сапфир-23МЛД" ТП-23М
Аэродинамическая схема "Утка" с элеронами Нормальная с дестабилизаторами
Масса, кг 472 465 для РГС 216 для ИГС для РГС 237 для ИГС
Масса БЧ, кг 52 55 25 35
Тип БЧ Диаметр корпуса, м Осколочно- фугасная Осколочно- стержневая 0,3 Стержневая 0,2
Длина, м Размах оперения, м 6,10 5,95 1,45 4,45 1,0 4,49
Энерговоору- женность , кгс/ кг Тип двигателя 65 66 50 РДТТ однорежимный 63
Целеуказа- РГС фцу = ± 60 0 Ч>цу = ±50" <рт = ±50<|
ние головке ИГС <puv = ±55“ Ф» = ±55и 4>Uy = ±55° q>Uv = + 55°
Тип системы Самонаведе- Инерциальное на- Самонаведение с за- Инерциальное на-
наведения ние с захва- ведение. Самона- хватом ПАРГС на тра- ведение. Самона-
том ПАРГС ведение с захва- ектории. До захвата ведение с захватом
Метод наведения Максимальная в подвесе том ПАРГС на управление по "стар- траектории товой” поправке ИГС с охлаждением азотом Пропорциональное наведение ПАРГС на траек- тории
скорость цели, км/ч 3000 2700 3000
Диапазон высот пораже- ния цели, км Максимальная 0,5...27 0,05...30 0,05...25 0,04...25
дальность пуска, км, ППС/ЗПС 30/16 40/20 25/15 32 /19,5
Минимальная дальность пуска, км ,ЗПС 2.3 1.0 1.4 0.5
Перегрузка перехваты- ваемой цели 2,5 4 5 7
Ракета Р-23 создавалась для истребителя МиГ-23, БРЛС которого впер-
вые оснащалась системой селекции движущейся цели (СДЦ). Для обеспече-
ния наведения ракеты на цель на фоне подстилающей поверхности была раз-
203
работана РГС непрерывного излучения, селектирующая подвижную цель на
фоне земли благодаря доплеровскому смещению отраженного от нее сигнала.
РГС-23 осуществляет последовательный поиск цели по частоте, обнару-
жение и сопровождение монохроматического сигнала, измерение мощности
шумоподобного сигнала, разделяя по величине угловых флюктуаций сосредо-
точенный по углу источник шумовой помехи и распределенные по углу отра-
жения от подстилающей поверхности. При атаке цели в ЗПС на фоне земли
эти отражения загрубляют головку, снижая дальность захвата цели, однако
анализ угловых флюктуаций защищает РГС от ложных захватов.
Следящий по частоте селектор скорости удерживает сигнал цели в полосе
измерителя угловых рассогласований. Шумоподобный сигнал, действующий
на частоте цели, попадает в эту же полосу, причем при воздействии узкопо-
лосной шумовой помехи угловое сопровождение восстанавливается благода-
ря поиску по частоте.
В РГС-23 применен чрезвычайно эффективный метод построения моно-
импульсного приемника, известный в литературе как "фильтр-ограничитель-
фильтр" или схема SHOU. Существо этого метода состоит в том, что суммар-
ный сигнал и сдвинутые на 90° относительно него промодулированные разно-
стные сигналы суммируются, усиливаются и ограничиваются. В результате
формируется сигнал, модулированный по фазе так, что индекс модуляции
пропорционален угловой ошибке.
Данный способ был использован во всех последующих разработках оте-
чественных головок самонаведения ракет средней дальности. При его приме-
нении практически невозможно вызвать появление ошибок измерения угло-
вого рассогласования с помощью амплитудной модуляции излучаемого це-
лью сигнала.
Аналогичная по своим задачам американская ракета AIM-7E2 "Спэрроу",
разрабатывавшаяся примерно на 10 лет раньше, а также ее более поздняя
модификация AIM-7F "Спэрроу" использовали метод конического сканиро-
вания.
Моноимпульсный метод обработки в зарубежных ракетах класса "воздух-
воздух" появился почти на 10 лет позже, чем в ракете Р-23: в ракете "Скай
Флеш" (Великобритания) - в 1978 г., в ракете AIM-7M "Спэрроу " (США)-
в 1981 г., в ракете "Супер 530Д" (Франция) - в 1986 г.
При создании ракеты Р-23 возникла необходимость захвата цели на тра-
ектории. Эта необходимость вызвана тем, что сигнал подсвета, излучаемый
БРЛС, содержит шумовую составляющую, исключающую возможность обна-
ружить сигнал цели до отлета ракеты на достаточное расстояние. Кроме того,
пока ракета не окажется между БРЛС и целью, доплеровская частота изменя-
ется немонотонно, и организовать слежение за сигналом цели достаточно
трудно.
Перед пуском на борту истребителя вычисляется и передается на ракету
заданный пеленг, под которым была бы видна цель, если бы ракета была пу-
шена в упрежденную точку. Для исправления начальной ошибки прицелива-
ния, уменьшения угловой скорости линии визирования, облегчения захвату
цели на траектории ракета Р-23 управляется на начальном участке полета с
помощью так называемой стартовой ("английской") поправки, обнуляющей
разность заданного и текущего пеленгов цели.
204
При малых ошибках пуска принятые меры для организации захвата на
траектории позволили увеличить в полтора раза допустимую дальность пуска
ракеты по сравнению с потенциальной дальностью захвата головки. При мак-
симальных ошибках, особенно в ЗПС цели, разница между дальностями пуска
и захвата существенно меньше.
Формирование закона управления в ракете Р-23 традиционно: заданная
перегрузка в связанной системе координат пропорциональна произведению
угловой скорости на скорость сближения. Оригинальным решением является
использование на больших высотах интегродифференцирующего фильтра,
ослабляющего воздействие синхронных ошибок РГС.
Ракета Р-24 является модернизацией ракеты Р-23, причем в части системы
управления - модернизацией чрезвычайно глубокой.
Впервые в системе управления ракеты Р-24Р применены принципы инер-
циального управления, когда после пуска до захвата цели, благодаря интегри-
рованию ускорений ракеты, корректируются заданная перегрузка и угловое
положение антенны головки. Это осуществляется с помощью модели кинема-
тических соотношений, построенной во вращающейся системе координат,
использующей линию дальности в качестве оси X - дифференциального
уравнения, связывающего угловую скорость линии визирования с проекцией
перегрузки ракеты на ортогональную ей плоскость.
Коэффициентами этих уравнений являются относительная дальность и
скорость сближения, которые также вычисляются в результате интегрирова-
ния соответствующей проекции перегрузки. Необходимые для вычислений
начальные условия по угловой скорости линии дальности формируются в вы-
числителе ракеты в процессе отработки углового целеуказания, когда ракета
еще находится в подвеске.
Функционирование вычислителя, в результате которого прогнозируется
угловая скорость линии дальности, начинается с момента схода, причем в мо-
дели используются измерения перегрузки ракеты в проекциях на антенные
оси, а также измерение угловой скорости ракеты относительно продольной
оси ракеты. В результате, несмотря на отсутствие захвата цели головкой, в
процессе отработки стартовых возмущений и при разгоне ракеты вырабаты-
вается оценка угловой скорости линии дальности, необходимая для управле-
ния ракетой и антенной головки.
Применение инерциального управления до захвата цели головкой позво-
лило полностью использовать возможности ракеты по исправлению ошибок
пуска. При этом соотношение между допустимой дальностью пуска и дально-
стью захвата оказалось независимым от ошибок пуска. В системе управления
ракеты Р-24Р модель кинематических соотношений во вращающейся системе
координат, связанной с линией дальности, используется и после захвата в ка-
честве фильтра для оценивания угловой скорости. Таким образом, в системе
управления ракеты Р-24Р для фильтрации и формирования управлений впер-
вые применяется фильтр калмановской структуры, использующий в качестве
ядра фильтра модель объекта - кинематические соотношения, связывающие
угловую скорость линии дальности и относительное ускорение.
Модернизированная ракета Р-24 (Р-24М) отличается существенно более
высокой помехозащищенностью, а также появлением принципиально нового
режима наведения на зависший над землей вертолет.
205
В связи с угоном истребителя МиГ-25П и заменой на нем БРЛС была
проведена модернизация ракеты Р-40 (Р-40Д). Модернизация состояла в том,
что на ракете была установлена головка самонаведения ракеты Р-24Р. При
этом, несмотря на больший мидель ракеты, для обеспечения захвата на траек-
тории пришлось сохранить размеры антенны РГС-24. В противном случае
ширина диаграммы направленности оказалась бы меньшей, и условия захвата
стали бы более сложными.
Головка самонаведения ракеты Р-40Д была последней из радиоголовок,
на которой применялась силовая гиростабилизация антенны. На первых раке-
тах средней дальности использовался двух-, а начиная с ПАРГ-10 - четырех-
гироскопный стабилизатор. На всех последующих РГС применяется индика-
торная стабилизация с установкой на антенне датчиков угловой скорости или
трехстепенных управляемых гироскопов типа МГТУ.
2.5.3. Очерк истории создания отечественного
управляемого оружия класса ’’воздух - воздух’’*
Создание ракет класса "воздух-воздух" знаменовалось успешным реше-
нием многих проблемных вопросов, являвшихся принципиальными на своих
этапах разработки все более совершенных образцов ракет. Еще в процессе ра-
боты над ракетами серии К-5 (К-5, К-5М, К-5МС) были выявлены принципи-
альные недостатки лучевой системы наведения (узкие зоны атак из задней
полусферы цели, ограниченная дальность, возможность потери цели при ее
маневре и т. д.) и необходи-
Ракета РС-2-УС (К-5МС)
мость применения для ракет
класса "воздух-воздух" систем
самонаведения. Теория и прак-
тика систем самонаведения по-
лучили интенсивное развитие в
ГосНИИАС благодаря усилиям
молодых тогда ученых.
В 1956 г. Е. А. Федосов защи-
щает кандидатскую диссертацию по динамической точности самонаводящих-
ся снарядов класса "воздух-воздух". Ей предшествуют более десяти работ.
выполненных в соавторстве с другими учеными, по различным аспектам рас-
чета и математического моделирования систем самонаведения. В процессе
моделирования самонаведения всеракурсной ракеты устанавливается эмпи-
рически, а затем обосновывается теоретически одно из фундаментальных для
того времени положений теории самонаведения- связь между потребной
управляющей перегрузкой ракеты и угловой скоростью линии визирования
посредством коэффициента, зависящего от скорости сближения.
Постановлением ЦК КПСС и правительства СССР в 1954 г. было задано
создание сразу трех самонаводящихся ракет нового поколения: К-6, К-7 и К-8,
а несколько позже (в 1958 г.) - ракеты К-9. Особенно активно разрабатыва-
* Составлен по материалам Давыдова А.Н., вошедшим в книгу [2.4].
206
лась самонаводяшаяся ракета К-8 в ОКБ-4 Минавиапрома под руководством
главного конструктора М. Р. Бисновата. При разработке этих ракет были
вскрыты и нашли техническое решение две сложные проблемы. Одна из них
связана с созданием первого в нашей стране гиростабилизированного привода
антенн головок самонаведения.
Ранее разрабатывавшиеся ракеты безуспешно пытались оснастить голов-
ками самонаведения с подвижной относительно корпуса антенной. В ходе ра-
бот по ракете возникли проблемы, связанные с отработкой силового двухгиро-
скопного гиростабилизатора ГС-1. Антенна РГС, установленная на гироплат-
форме, не воспринимала колебаний корпуса ракеты по каналам курса и
тангажа, оставаясь неподвижной
в пространстве. Однако, когда за-
давалось качание корпуса по кре-
ну, появлялся уход антенны, при-
водящий к ложным сигналам в
контуре наведения. Наличие та-
кого ложного сигнала приводило,
как это показало моделирование, Ракета Р-8М (К-8М)
к недопустимо большим промахам. Причины нестабильности гиростабилиза-
тора ГС-1 были выявлены в результате теоретического анализа на основе опи-
сания движения антенны системой матричных дифференциальных уравнений.
Практически проблема была решена использованием гиростабилизатора дру-
гой конструкции по схеме Берлина, в которой корпуса гироскопов были соеди-
нены шарнирной связью-"спарником".
Другая проблема была связана с явлением так называемых синхронных
ошибок головки самонаведения, с которым столкнулись впервые при созда-
нии ракеты К-8. В данном случае синхронные ошибки возникали из-за разно-
сти величин преломления радиолуча при прохождении через различные уча-
стки обтекателя. Находящаяся под обтекателем антенна из-за разности вели-
чин преломления в случае колебаний корпуса ракеты начинает формировать
ложный сигнал угловой скорости линии визирования (соответствующий час-
тоте колебаний). Этот сигнал образует "паразитную" обратную связь по пере-
грузке, которая может быть положительной, дестабилизирующей или отрица-
тельной, избыточно стабилизирующей, но в любом случае нарушающей нор-
мальную работу контура наведения. Измерения градиента синхронной
ошибки первых образцов обтекателей показали их значения до 0,15 град/град,
что оказалось совершенно неприемлемым. Проблема обтекателя в дальней-
шем для этой ракеты решалась путем повышения требований к конструкции,
подбору материалов, контролю обтекателей на специальных измерительных
стендах, а также путем использования оптимальной фильтрации управляюще-
го сигнала. Последующее изучение проблемы синхронных ошибок показало,
что они зависят не только от обтекателя, но в ряде случаев определяются так-
же качеством устройств подвеса антенны (жесткость, люфты, трение), а также
особенностями хода радиолуча для антенн сложной конструкции (двухзер-
кальных). Развитие в последнее время цифровых методов управления позво-
лило предложить ряд методов компенсации синхронных ошибок антенных
систем - табличных по запомненному портрету ошибок, введенному в память
системы, и динамических.
207
Работы по самонаводяшимся ракетам К-6 (ОКБ-2 главного конструктора
П. Д. Грушина) и К-7 (ОКБ-134 главного конструктора И. И. Торопова) не по-
лучили развития. До стадии начала летных испытаний было доведено не-
сколько вариантов этих ракет с различными головками самонаведения и аэро-
динамическими схемами.
Разработка конструкции ракеты К-9 с 1958 г. проводилась в ОКБ-134, а
затем (в 1959 г.) была передана в ОКБ-155. Система самонаведения создава-
лась в КБ-1. Ракета должна была войти в состав автоматизированного ком-
плекса перехвата "Ураган-5Б" и применяться с истребителей-перехватчиков
Е-150, Е-152-1, Е-152А, Е-152-2, Е-152М. В 1961-1963 гг. макеты ракеты К-9
прошли летные испытания, но пусков реальных ракет не было по причине за-
крытия работ по системе "Ураган-5".
В 1957 г. на вооружение истребителей США поступает новая самонаво-
дящаяся ракета с ИК-головкой самонаведения AIM-9B "Сайдуиндер". Появ-
ление этой ракеты стало без преувеличения эпохальным событием в ракето-
строении. Почти одновременно с этой ракетой на вооружении английских ис-
требителей "Лайтнинг" появляется самонаводящаяся ракета "Файрстрик" с
ИК-головкой самонаведения. Появление на вооружении зарубежных самоле-
тов легких самонаводящихся ракет с ИК ГСН заставило руководство СССР
принять решение о разработке аналогичного оружия. С этой целью был объ-
явлен конкурс на разработку легкой самонаводящейся ракеты. В ОКБ-4 при-
ступили к работам над ракетой К-88 с ИК ГСН в направлении глубокой мо-
дернизации ракеты К-8 с целью уменьшения ее размеров и массы. НИИ-2
(ГосНИИАС) совместно с КБ при КМЗ предложил модифицировать серийную
ракету типа К-5М в самонаводящуюся К-55.
В это время произошел инцидент над Тонкинским проливом. В ряду про-
должавшихся несколько лет многочисленных столкновений между истреби-
телями КНР и Тайваня впервые в воздушном бою были применены ракеты
класса "воздух-воздух". Тайваньские истребители F-105, вооруженные раке-
тами AIM-9B "Сайдуиндер", атаковали группу самолетов КНР вблизи мате-
рикового побережья, причем несколько ракет упали на территории КНР.
Упавшие ракеты чрезвычайно заинтересовали советских представителей в
дружественном тогда Китае. Найти и собрать обломки ракет было непросто,
они рассеялись на площади более 100 км2. Задачу помогла решить китайская
армия. В результате нашли, откопали, собрали обломки трех ракет. Обломки
были переданы СССР и поступили для изучения в ОКБ-134 и в НИИ-2. Не-
сколько позже были найдены и также поступили в нашу страну неразорвав-
шиеся ракеты в достаточно хорошо сохранившемся виде. Перед нашими спе-
циалистами была поставлена задача воспроизведения этой ракеты без каких-
либо отступлений от оригинала. Началось изучение обломков, макетирование
и экспериментальное исследование восстанавливаемых агрегатов.
Результаты проведенных исследований, как и сама ракета "Сайдуиндер".
произвели столь убедительное впечатление на военных и руководителей Ми-
навиапрома, что без всяких проволочек в 1957 г. было принято постановление
о "воспроизводстве" - копировании с незначительными изменениями - ракеты
"Сайдуиндер" под индексом К-13. Разработка самой ракеты К-13 была поруче-
на ОКБ-134 под руководством И.И. Торопова, создание инфракрасной ГСН
(ИГС) проводилось по конкурсу НИИ-10 (ИГС-59) и ЦКБ-589 (ТГС-13К).
208
Создание ракеты К-13 завершилось в рекордно короткие сроки. В 1961 г.
началось серийное производство, а в 1962 г. ракета под обозначением Р-ЗС
с ТГС-13К была принята на вооружение истребителей МиГ-21Ф-13 и
МиГ-21 ПФ. Работы по воспроизведению ракеты "Сайдуиндер" и созданию
отечественного аналога К-13 отодвинули на некоторое время реализацию
предложения НИИ-2 о модернизации ракеты К-5М в самонаводящуюся К-55.
Однако в 1960 г. председатель ГКАТ П.В. Дементьев предложил КБ при КМЗ,
руководимому Ю. Н. Королевым, совместно с НИИ-2 создать на базе К-5М
самонаводящуюся ракету К-55 с ИГС-58. Это задание было выполнено. Не-
большой коллектив КМЗ под руководством НИИ-2 разработал ракету с высо-
кими для того времени тактико-техническими характеристиками и хорошей
помехозащищенностью. Система управления ракеты К-55 прошла всесторон-
ние исследования с использованием методов математического и полунатурно-
го моделирования. В 1967 г. ракета К-55 стала производиться серийно на КМЗ
и в этом же году была принята под обозначением Р-55 на вооружение самоле-
тов Су-9, Су-11, Су-15, МиГ-21 СМ, МиГ-21 бис.
Таким образом, ракета К-55 выиграла конкурс у ракеты К-88, работы по
которой были прекращены. В то же время, с 1958 г. в ОКБ-4 при участии ин-
ститута проводилась разработка ракеты К-80. Ракета была создана в двух
комплектациях: с радиолокационной импульсной полуактивной головкой са-
монаведения ПАРГ -1ОВВ главного конструктора Н. А. Викторова и с инфра-
красной головкой главного конструктора Д. М. Хорола. Эта ракета вошла в
состав комплекса дальнего перехвата Ту-128-80 на базе дальнего перехватчи-
ка Ту-128 с БРЛС "Смерч" главного конструктора Ф. Ф. Волкова.
В работах по комплексу перехвата Ту-128-80 в составе системы ПВО
"Воздух-1" НИИ-2 впервые было осуществлено полное научное сопровожде-
ние разработки: от математического моделирования на этапе проектирования
через стендовую отработку опытных образцов аппаратуры до полунатурного
моделирования по программе Государственных летных испытаний. В 1965 г.
комплекс Ту-128-80 (под обозначением Ту-128-С4) с ракетой К-80 (получив-
шей обозначение Р-4) был
сдан на вооружение. Он был
первым комплексом, спо-
собным осуществлять пере-
хват на дальних рубежах в
передней полусфере высот-
ных скоростных самолетов- Ракета Р-4Р (К-80Р)
бомбардировщиков большо-
го радиуса действия, которые начали появляться на вооружении развитых ка-
питалистических стран в конце 50 - начале 60-х годов. Для этих же целей не-
сколько позже (1970 г.) был создан уникальный для своего времени комплекс
высотного перехвата в составе самолета МиГ-25 с БРЛС "Смерч-A" и высот-
ной ракеты Р-40 с радиолокационной полуактивной импульсной головкой
ПАРГ-12 и тепловой головкой самонаведения. Большая высотность ракеты
Р-40 достигалась за счет развитого крыла, ослабляющего влияние синхронных
ошибок головки самонаведения, увеличенного запаса топлива, разнесенной
по длине ракеты боевой части (в середине корпуса и в хвосте), а также за счет
209
14-4094
тщательной отработки радиолокационной головки самонаведения и системы
управления. Дополнительные возможности по поражению высотных целей
обеспечивались вариантом ракеты с ИГС.
Интенсивное развитие системы ПВО, в том числе наличие авиационных
комплексов дальнего высотного перехвата по типу Ту-128-С4, МиГ-25П-40,
заставляло искать новые тактические приемы проникновения ударных само-
летов на территорию противника. В качестве такого приема был выбран полет
на предельно малых высотах с большими скоростями. Использовавшиеся до
этого импульсные БРЛС самолетов и полуактивные РГС, работающие по от-
раженному сигналу этих БРЛС, оказались непригодными для обнаружения,
пеленгации и наведения на низколетящие цели на фоне мощных отражений
собственного сигнала от подстилающей поверхности. Пути преодоления это-
го недостатка в авиационных комплексах были понятны - использование
принципа доплеровского сдвига частот отраженных сигналов для селекции
движущейся цели относительно неподвижного фона. Техническая реализация
этого принципа осуществлялась практически параллельно в СССР и США и
привела к созданию сопоставимых по боевым возможностям авиационных
комплексов МиГ-23М с БРЛС "Сапфир-23М" и ракетой К-23 и F-4 "Фантом" с
ракетой AIM-7D, Е, Е-2 "Спэрроу".
Работы по ракете К-23 еще не успели полностью развернуться, как из вою-
ющего Вьетнама был получен "подарок" - американская ракета AIM-7E "Спэр-
роу". Во время налета на порт Хайфон был сбит американский истребитель-
бомбардировщик F-4. Он упал в море и затонул на небольшой глубине, благо-
даря чему сохранились неразрушенными подвешенные на нем ракеты. Одна из
ракет была доставлена в Москву и поступила на изучение. Другая ракета была
"снята" с упавшего горящего самолета F-4 группой советских специалистов,
находившихся во Вьетнаме. У ряда военных и гражданских специалистов воз-
никла идея воспроизведения этой ракеты в отечественном образце наподобие
ситуации "Сайдуиндер" - К-13. Главный довод состоял в том, что на ракете
AIM-7E уже использовалась головка непрерывного излучения, работающая на
фоне земли, а разрабатываемая главным конструктором Е. Н. Геништой отече-
ственная РГС-23 еще не показала своих качеств. Было принято решение о вос-
производстве разработке ракеты К-25 как аналога AIM-7E "Спэрроу".
На основе тщательного сравнительного анализа характеристик ракет К-25
(AIM-7E) и К-23 институт НИИ-2 занял позицию отстаивания отечественной
разработки. Основным аргументом при этом было то, что ракета AIM-7E
представляет собой устаревшую модель и ее копирование означает шаг назад,
в то время как американцы уже начали работы по модернизации AIM-7F.
Другим важным аргументом было то, что в РГС-23 используется более про-
грессивный моноимпульсный метод обработки радиолокационного сигнала в
отличие от метода конического сканирования в РГС ракеты А1М-7Е. Правота
позиции института была подтверждена временем, и в модификации А1М-7М
(следующей за AIM-7F) американцы тоже перешли на моноимпульсный
принцип, но с опозданием почти на десять лет. Таким образом, удалось\цо-
биться продолжения работ по ракете К-23 параллельно с работами по К-25,
что было продублировано постановлением от 17.11.67 г. Главным конструк-
тором ракеты К-23 был назначен В. А. Пустовойтов. Началась параллельная
конкурсная разработка двух ракет - К-25 и К-23, выполнявшаяся практически
210
одним и тем же коллективом (за исключением головок самонаведения). Соз-
далась ситуация, позволявшая заимствовать оригинальные идеи, реализован-
ные в зарубежной ракете, для улучшения собственной разработки. Однако из
ракеты "Спэрроу" практически ничего заимствовано не было, хотя ориги-
нальных технических решений в ней было использовано много. В разработке
ракеты К-23 НИИ-2 участвовал с самого начала; исследования по этой ракете
проводил большой коллектив специалистов под руководством Е. А. Фе-
досова, Р. Д. Кузьминского, В. Ф. Левитина.
В 1973 г. ракета К-23 (под наименованием Р-23) была принята на воору-
жение истребителя МиГ-23. Параллельная разработка ракеты К-25 заверши-
лась изготовлением нескольких опытных образцов и была прекращена в нача-
ле летных испытаний, после того как стало очевидным ее отставание по сро-
кам и характеристикам от ракеты Р-23. Ракета Р-23 около 10 лет сохраняла
превосходство по тактико-техническим характеристикам над однотипными
зарубежными ракетами по уровню эффективности в сложной информацион-
ной обстановке, помехозащищенности от всех известных типов активных со-
вмещенных помех и в условиях отражений от подстилающей поверхности
при атаке низколетящей цели. Только в 1982 г. ракета AIM-7M "Спэрроу" с
доплеровской моноимпульсной головкой самонаведения достигла паритетно-
го уровня с ракетой Р-23.
В начале 70-х годов в СССР под влиянием сведений о разработке в США
комплекса F-14A с ракетой AIM-54A "Феникс" началось создание собствен-
ного многоканального комплекса дальнего перехвата "Заслон" на базе истре-
бителя-перехватчика МиГ-31 и ракеты К-33. Однако концепция отечествен-
ного комплекса "Заслон" существенно отличалась от американской. Отечест-
венный комплекс предназначался для территориальной ПВО районов страны
с редкой сетью аэродромов и наземных средств наведения. Это требовало по-
вышенной автономности действий, больших рубежей перехвата и зон ответ-
ственности, многоканальное™ обстрела целей в пределах всего боекомплек-
та. Для обеспечения этих требований на перехватчике МиГ-31 была исполь-
зована РЛС с фазированной антенной решеткой, имеющая значительно
большие возможности по поиску, обнаружению, сопровождению целей и
обеспечению их подсвета по сравнению с РЛС AWG-9 с механической антен-
ной. Благодаря практической безынерционное™ переброса луча станции с
ФАР в режиме подсвета нескольких целей оказалось возможным в ракете
К-33 применить полуактивную РГС с обеспечением приемлемой точности на-
ведения одновременно четырех ракет на четыре цели.
Вся система управления комплекса, включая РЛС с ФАР "Заслон" и полу-
активную РГС ракеты, разрабатывалась НПО "Фазотрон" под руководством
главного конструктора В. К. Гришина. По концепции построения и реализо-
ванным характеристикам комплекс МиГ-31 с РЛС "Заслон" опередил уровень
зарубежной техники и до настоящего времени сохраняет лидерство, не имея
близких аналогов за рубежом. Разработка ракеты К-33 была поручена КБ
"Вымпел", возглавлявшемуся в то время главным конструктором А. Л. Ляпи-
ным. Руководителем разработки был назначен Ю. К. Захаров. В 1980 г. ракета
под наименованием Р-33 была принята на вооружение. Одновременно начина-
ются работы по ее модернизации, которые продолжались до конца 80-х годов.
211
14'
Локальные войны в Корее, Вьетнаме, на Ближнем Востоке показали, что
истребители противников все чаще вступают в противоборство с использова-
нием своего ракетного вооружения. При этом имевшиеся в то время ракеты
оказывались малоэффективными при действии по истребителям. Назрела не-
обходимость пересмотра концепций вооружения класса "воздух-воздух". Гос-
НИИАС был одной из первых организаций, обосновавших необходимость соз-
дания ракеты ближнего воздушного боя. Эта задача была решена созданием
ракеты К-60, принятой в 1974 г. под обозначением Р-60 на вооружение практи-
чески всех существовавших в то время самолетов истребительной авиации.
Конструкторам удалось решить
проблему миниатюризации и
создать ракету рекордно малых
массы (~45 кг) и габаритов
(диаметр 120 мм, длина ~2 м).
Наличие у СССР ракеты
ближнего воздушного боя К-60,
сведения о которой просочились
за рубеж, вызвало определенное
беспокойство в военных кругах
США. Была сделана попытка
Ракета Р-60
создания собственной сверхлегкой ракеты LCLM (Low Cost Lightweight
Missile), разработка которой на конкурсной основе была предложена фирмам
Форд и Рейтеон. В 1977 г. несколько комплектов аппаратуры такой ракеты бы-
ло поставлено центру разработки и испытаний оружия ВВС США. Ракета
LCLM имела стартовую массу 36 кг, диаметр 115 мм и длину 2 м. Однако на-
правление легких и сверхлегких ракет ближнего воздушного боя не получило
дальнейшего развития ни в СССР, ни в США.
Практически одновременно с началом разработки ракеты ближнего воз-
душного боя К-60 начались интенсивные исследования тактики и динамики
воздушных боев истребителей. На основе большого объема исследований был
сделан основной вывод: эффективность авиационного комплекса в условиях
ближнего воздушного боя многократно возрастает в случае, если ракета обла-
дает качеством всеракурсности, так как подавляющее количество ситуаций
приводит практически к лобовым встречам противоборствующих истребите-
лей. Самолет, не имеющий всеракурсной ракеты, практически не способен
противостоять самолету, вооруженному такой ракетой. Другой вывод касался
необходимости увеличения углов целеуказания и определения требований к
ближней границе зон пусков посредством анализа статистики по угловым
скоростям линии визирования.
В это время ни у СССР, ни у США и других капиталистических стран не
было ракеты со всеракурсной ИГС. Тем не менее необходимость создания та-
кой ракеты была осознана к началу 70-х годов. Несмотря на то, что ракета
К-60 знаменовала собой значительное достижение отечественного ракето-
строения, она не могла в перспективе быть оснащена всеракурсной ИГС,
имеющей большие габариты и массу.
В целях совершенствования оружия ближнего воздушного боя истреби-
телей первоначально была задана разработка двух типов ракет с ИГС: ракеты
малой дальности с всеракурсной ИГС К-14 и малогабаритной ракеты ближне-
го воздушного боя с ИГС ограниченной ракурсное™ К-73.
212
Разработка ракеты К-14 поручалась КБ "Вымпел" (новое наименование
ОКБ-134). Ракету планировалось создать путем модернизации ракеты Р-13М в
направлении применения всеракурсной ИГС и совершенствования аэродина-
мической компоновки для увеличения располагаемых перегрузок.
Разработку ракеты К-73 осуществляло КБ "Молния" (новое наименование
ОКБ-4). Этому коллективу, успешно завершившему создание ракеты Р-60, на
первых порах трудно было от-
казаться от идеи повторить на
новом техническом уровне раз-
работку легкой ракеты. Поэто-
му первоначально ракета К-73
была представлена как малога-
баритная бескрылая ракета с
чисто газодинамическим управ-
лением, оснащаемая ИГС с
термоэлектрическим охлажде-
нием и ограниченной ракурс-
ностью.
В данной постановке ракеты К-14 и К-73 расходились по типам, назначе-
нию и характеристикам. Однако нецелесообразность ракеты с невсеракурсной
ИГС к этому времени уже была доказана ГосНИИАС, который резко возразил
против создания ракеты К-73 в предложенном виде. При содействии институ-
та киевский завод "Арсенал" в лице главного конструктора А. В. Молодыка
предложил разработку для ракеты К-73 всеракурсной, с чувствительным эле-
ментом на основе сурьмянистого индия, широкоугольной ПК ГСН "Маяк",
способной принимать целеуказание в пределах углов пеленга ±60°. Примене-
ние этой головки на ракете К-73 (Р-73) потребовало увеличения ее массы и
габаритов при том, что бескрылая компоновка и чисто газодинамическое
управление сохранялись.
Первоначально постановка задач этих исследований состояла в том, что-
бы определить слабые стороны уже существующих ракет, ограничивающие
боевые возможности комплексов, по открытым и закрытым сведениям о зару-
бежных ракетах, в том числе по их фотографиям, представить их воспроизве-
денные характеристики и дать сравнение с характеристиками отечественных
ракет, провести прогнозные оценки требований к перспективным ракетам со
стороны новых авиационных комплексов с учетом развития противодейст-
вующих средств противника и, наконец, сформировать концепцию и основ-
ные обликовые характеристики ракет следующего поколения. Появляется на-
именование ракеты К-27, которая должна прийти на смену ракете Р-23.
В это время основным истребителем ВВС США является F-4 "Фантом" с
ракетами AIM-7E, AIM-7E-2 "Спэрроу". С советской стороны ему противосто-
ял истребитель типа МиГ-23 с ракетами Р-23. Однако в США заканчивается
создание нового истребителя F-15 и полным ходом идет разработка новой мо-
дификации ракеты AIM-7F "Спэрроу" с существенно более высокими характе-
ристиками. В СССР начато создание истребителей нового поколения МиГ-29 и
Су-27 в соответствии с концепцией развития истребительного парка страны.
В части оружия класса "воздух-воздух" для этих истребителей сохраняется
полная неопределенность, так как никто не берег на себя задачу определить
требования и сформулировать концепцию вооружения этих истребителей.
213
Предложения по ракете К-27 разрабатываются в 1972-1973 гг. В конце
1973 г. концепция этой ракеты рассматривается с участием представителей
всех заинтересованных организаций: ГосНИИАС, ОКБ им. И. О. Сухого, ОКБ
им. А. И. Микояна, КБ "Вымпел", КБ "Молния", НПО "Фазотрон", а также
представителей ВВС; начи-
нает разворачиваться разра-
ботка ракеты.
Ракету К-27 предложено
было создавать по модульно-
му принципу в части систем
управления и двигательных
установок. Ракета рассматри-
валась как оружие достиже-
ния превосходства в воздухе
вновь создаваемых истреби-
телей, в том числе в условиях
дуэльных боев с истребите-
лями F-15, использующими
Ракета Р-27
ракеты AIM-7F. За счет модульности двигательных установок достигалось
наилучшее соответствие базовой модификации ракеты К-27 возможностям
легкого истребителя МиГ-29 и модификации повышенной энерговооружен-
ности ракеты К-27Э возможностям тяжелого истребителя Су-27.
По системе ракет К-27/К-27Э на этапе технических предложений был ор-
ганизован конкурс между КБ "Вымпел" и "Молния", который был выигран
КБ "Вымпел". В эскизном проекте ракета К-27/К-27Э была представлена в ва-
риантах нормальной аэродинамической схемы и схемы "утка", управляемой
по всем трем каналам развитыми по площади рулями с обратной стреловид-
ностью по передней кромке. ГосНИИАС поддерживалась "нормальная" схе-
ма. Результаты сравнительного анализа показывали, что схема "утка" перетя-
желена, переусложнена, имеет большее аэродинамическое сопротивление при
нулевом угле атаки и худшее аэродинамическое качество. Однако в выборе
схемы в силу ряда причин, в том числе не всегда технического порядка, побе-
дила линия КБ "Вымпел" и ЦАГИ, и ракета К-27/К-27Э была создана по су-
ществующей схеме. Жизнь показала, что схема оказалась малоперспективной,
не получившей развития в последующих разработках. Парадокс состоял в
том, что от нормальной схемы ракеты К-23 отечественные разработчики пе-
решли к схеме промежуточной между "уткой" и "поворотным крылом", близ-
кой к схеме ракеты AIM-7 "Спэрроу", а американские разработчики отказа-
лись от схемы "Спэрроу" в пользу нормальной схемы при переходе к ракете
AMRAAM.
Разработка ракеты К-27/К-27Э велась под влиянием уже известных к то-
му времени данных о ракете A1M-7F "Спэрроу", начало серийного производ-
ства которой относится к 1975 г. При формировании характеристик системы
управления ракеты К-27 проводилось их сопоставление с характеристиками
ракеты AIM-7F "Спэрроу" в составе комплекса F-15 с БРЛС APG-63. Макси-
мальная дальность действия системы наведения ракеты A1M-7F "Спэрроу"
определялась как дальность захвата цели полуактивной РГС с учетом не-
большого начального участка полета до захвата с помощью так называемой
214
стартовой (или "английской") поправки. В полуактивной РГС ракеты К-27 не
удавалось достичь дальностей, равных или превосходящих дальности РГС
"Спэрроу", из-за различий, в основном, в чувствительности приемников и ве-
личинах потенциала подсвета БРЛС самолетов-носителей: без достижения
превосходства по системной дальности задание разработки ракеты К-27 не
могло состояться. Было предложено недостатки ракеты К-27 по дальности
самонаведения компенсировать, причем с большим запасом, за счет участка
полета до захвата, организовав инерциальное управление с коррекцией по
сигналам от БРЛС истребителя. Таким образом, на ракете К-27 впервые в оте-
чественной и мировой практике и значительно раньше, чем в ракете
AMRAAM, было реализовано инерциально-корректируемое управление с са-
монаведением на конечном участке.
Созданием ракет К-27/К-27Э было достигнуто существенное превосходст-
во над ракетой США того времени AIM-7F "Спэрроу", состоявшее в следующем:
• наличие модульных систем наведения с полуактивной РГС, пассивной
РГС и ИГС давало ракетам тактическую гибкость применения в зависи-
мости от боевых условий и затрудняло противнику выбор способов про-
тиводействия;
• превосходство в дальности пуска, обеспечиваемое инерциальной систе-
мой управления с радиокоррекцией и полуактивной РГС, позволяло до-
биваться опережения в применении своих ракет и раньше начинать ма-
невр тактического отворота;
• модульность по двигательным установкам позволяла иметь легкую мо-
дификацию К-27, равную по баллистическим возможностям ракете
AIM-7F, и энерговооруженную модификацию К-27Э, значительно пре-
восходящую AIM-7F по средней скорости, дальностям отлета от своего
носителя и обеспечивающую тем самым гарантированный выигрыш в ду-
эли с самолетами F-15 и F-18, оснащенными ракетами AIM-7F.
При создании ракет К-27/К-27Э возникало и было преодолено множество
сложных технических проблем, связанных с головками самонаведения всех
трех типов, инерциальной системой, линией радиокоррекции, контуром ста-
билизации и др. В 1984-1985 гг. ракеты под наименованиями Р-27 и Р-27Э в
разных комплектациях по ГСН приняты на вооружение.
Еще в период развертывания работ по ракетам Р-27/Р-27Э стало ясно, что
ряд предъявляемых к ним требований может быть реализован при модерниза-
ции ракеты Р-23 в модель Р-24 (при разработке имела наименование К-24).
В это время определяется, что одной из основных тактических ситуаций при-
менения ракет класса "воздух-воздух" следует считать действия истребителя
против истребителя. Это требует от ракеты увеличения дальности системы
наведения, существенного повышения средней скорости и дистанции отлета
от своего самолета-носителя в момент поражения цели, возможности пораже-
ния цели в плотной группе, работоспособности на фоне подстилающей по-
верхности в передней и задней полусферах, повышения помехозащищенности
от совмещенных и вынесенных помех всех видов, возможности поражения
интенсивно маневрирующих целей, в том числе при применении ими специ-
альных видов маневров, уменьшения минимальных дальностей пуска. Имен-
но с учетом этих требований и производилась разработка модернизированной
ракеты Р-24.
215
В короткие сроки ракета Р-24 была создана и поступила на вооружение
модернизированных истребительных комплексов МиГ-23МЛ, МиГ-23МЛА.
Сделан существенный шаг на пути к оснащению ракет класса "воздух-воздух"
инерциальными системами. Была предложена и реализована схема вычисли-
тельного устройства под названием "псевдокинематическое звено", прогнози-
ровавшего относительное движение ракеты и цели и вырабатывавшего ко-
манды управления на участке полета ракеты до захвата цели ГСН. Эта схема
позволяла увеличить дальность пуска в 1,3 раза по отношению к дальности
захвата ГСН. В ракете Р-24 были улучшены и остальные характеристики в
плане удовлетворения перечисленным выше новым требованиям. По сущест-
ву, была создана новая и очень удачная ракета, причем на основе преемствен-
ности с предыдущей моделью Р-23.
В 1976 г. на Дальнем Востоке произошло событие, в результате которого
ракета Р-24 и комплекс МиГ-23МЛ с БРЛС "Сапфир-23" дали новую жизнь
ракете Р-40 и комплексу МиГ-25П-40: летчик дальневосточной ПВО перегнал
Ракета Р-40Д
свой истребитель-перехватчик
МиГ-25П в Японию. Самолет не
возвращали довольно долго, и
было известно, что его хорошо
изучили американские специа-
листы. Ракет Р-40 на самолете не
было, но по характеристикам
БРЛС и системы управления
вооружением можно было найти
уязвимые места комплекса и
разработать эффективные меры
противодействия. Таким обра-
зом, эффективность авиации
ПВО была поставлена под удар.
Последовало задание правитель-
ства разработать меры по пре-
дотвращению нанесенного стране ущерба. Суть технических предложений
сводилась к тому, чтобы заменить на самолете МиГ-25П БРЛС "Смерч-A" на
БРЛС типа "Сапфир-23" самолета МиГ-23М, а на ракетах Р-40 заменить им-
пульсные полуактивные головки ПАРГ-12ВВ на полуактивные РГС-24 непре-
рывного сигнала. Тактико-технические характеристики и эффективность та-
кого модернизированного комплекса существенно улучшались. Уже в 1979 г.
началось создание комплекса МиГ-25ПД с БРЛС "Сапфир-25" и ракетами
Р-40Д.
Со второй половины 70-х годов как в США, так и в СССР интенсифици-
руются работы по созданию концепций вооружения класса "воздух-воздух"
следующего поколения с качественно новыми характеристиками и боевыми
возможностями. С этой целью в США были проведены широкомасштабные
полигонные исследования по отработке концепций вооружения воздушного
боя по программе AIMVAL/ACEVAL (Air Intercept Missile Evaluation / Air
Combat Evaluation). По результатам выполнения программы были сделаны
выводы о необходимости:
216
• вооружить истребители управляемыми ракетами с эффективной дально-
стью пуска не менее 80 км, не требующими непрерывного сопровождения
цели после пуска, что позволит истребителю остаться за пределами пуска
ракет противника с ИГС;
• иметь на вооружении ракеты, пуск которых может осуществляться одно-
временно по нескольким целям, не находящимся непосредственно впере-
ди самолета.
В 1976 г. ВВС и ВМС США приступили к первой фазе разработки на
конкурсной основе новой управляемой ракеты средней дальности AMRAAM
(Advanced Middle Range Air-to-Air Missile) с инерциально-корректируемой
системой управления и активной РГС. Конкурс на полномасштабную инже-
нерную разработку ракеты AMRAAM выиграла фирма Хьюз. В 1984 г. ракета
AMRAAM была разработана, получила обозначение AIM-120A и в 1989 г. по-
ступила на вооружение истребителей США F-15, F-16, F-18. Основным новым
качеством этой ракеты стала реализация принципа "пустил - забыл", в соот-
ветствии с которым истребитель после пуска может выходить из атаки, укло-
няясь маневром от встречной атаки ракетами противника. Это достигается
путем использования на ракете активной РГС, не требующей подсвета цели
БРЛС самолета-носителя. Для увеличения дальности пуска за пределы даль-
ности захвата РГС на ракете используется инерциальная система управления.
Вырабатываемая инерциальной системой информация о взаимном положении
ракеты и цели корректируется по линии радиокоррекции, связывающей раке-
ту и самолет-носитель, по которой на ракету периодически передаются изме-
ряемые БРЛС координаты цели.
Таким образом, в ракете AMRAAM реализован принцип инерциально-
корректируемого управления до захвата цели РГС, примененный на ракетах
Р-27/Р-27Э. Однако на ракете AMRAAM, в отличие от ракеты Р-27/Р-27Э,
инерциальная система реализована в бесплатформенном виде на базе БЦВМ и
отдельного гироинерциального блока. Такое решение позволило увеличить
соотношение между дальностью пуска и дальностью захвата РГС до 4...6.
Другим важным новым качеством этой ракеты, обусловленным использова-
нием активной РГС в сочетании с ИСУ, стала многоканальность, т. е. воз-
можность одновременного применения нескольких ракет с одного носителя
по нескольким целям. Это свойство достигается (как и принцип "пустил-
забыл") за счет автономности системы наведения с активной радиолокацион-
ной головкой самонаведения (АРГС) на конечном участке траектории. И, на-
конец, третьим новым качеством ракеты AMRAAM было значительное, на 1/3
по сравнению с ракетой AIM-7F "Спэрроу", снижение стартовой массы,
уменьшение диаметра корпуса и внешних габаритов. Это позволило размес-
тить ракету на легком истребителе-бомбардировщике F-16. Размещение на
этом самолете ракет AIM-7F "Спэрроу" вызывало значительные трудности.
На других самолетах (F-15, F-18, F-14) стало возможным увеличение боеком-
плекта ракет AIM-120A AMRAAM.
Исследования в нашей стране показали настоятельную необходимость
создания отечественной ракеты с активной РГС. Отсутствие такой ракеты
приводило к 5-7-кратному проигрышу по эффективности авиационного ком-
плекса. Наконец, было принято решение о создании отечественной ракеты с
217
активной РГС в качестве ответной меры на создание ракеты AMRAAM. Раз-
работка ракеты началась с опозданием на несколько лет по отношению к про-
грамме AMRAAM. На начальной стадии был организован конкурс техниче-
ских предложений между КБ "Вымпел" и КБ "Молния". ГосНИИАС было по-
ручено дать оценку технических предложений и на их основе определить
направление разработки. КБ "Вымпел" выступило с компоновкой, близкой по
всем параметрам к ракете Р-24, а КБ "Молния" предложило, по существу,
уменьшенный вариант ракеты Р-40.
Несмотря на очевидные недостатки технических предложений обоих КБ,
предпочтение все же было отдано проработкам КБ "Вымпел", которое к этому
времени возглавил главный конструктор Г. А. Соколовский, сумевший при-
влечь к разработке лучших соразработчиков, смежников и четко организовать
их взаимодействие.
К этому времени в связи с работами по перспективному истребителю но-
вого поколения возникает требование внутрифюзеляжного размещения ракет
на самолете-носителе. Это требование было учтено в работе над компоновкой
ракеты. Треугольные крылья уже уменьшенной площади трансформируются в
крылья малого удлинения типа несущих ребер, и предусматривается склады-
вание решетчатых рулей. Таким образом, определяется принципиальный об-
лик ракеты. Однако, несмотря на настойчивые требования института, КБ не
соглашается с доводами в пользу уменьшения массы ракеты, основываясь в
основном на позициях соразработчиков агрегатов. А это подрывает одно из
ключевых положений концепции ракеты - уменьшение массы с целью увели-
чения боекомплектов при их многоканальном применении. Тогда начальни-
ком ГосНИИАС Е. А. Федосовым, принимавшим самое активное участие в
формировании идеологии ракеты и организации ее разработки, предпринима-
ется следующий ход. С использованием САПР и пакета графических про-
грамм формируется массогеометрический облик ракеты и изготавливается так
называемый директивный чертеж с указанием на нем масс и размеров всех
Ракета РВВ-АЕ
218
агрегатов; чертеж утверждается министром авиационной промышленности
И. С. Силаевым. Жизнь подтвердила действенность такого хорошо продуман-
ного и аргументированного волевого решения. Ракета была создана при не-
больших отступлениях от директивного чертежа.
Несмотря на отставание в сроках начала создания ракеты по отношению к
AMRAAM, разработка отечественной ракеты базировалась на хорошем науч-
но-техническом заделе, что позволило вести ее быстрыми темпами и почти
ликвидировать временное отставание к концу разработки. Имелся также зна-
чительный опыт работ по инерциальной системе, организации линии радио-
коррекции и по аэродинамике и конструкции решетчатых рулей. Огромный
объем работ выпал на долю ГосНИИАС в части организации взаимодействия
АРГС, ИСУ и бортового оборудования самолета-носителя, разработки мате-
матического обеспечения, создания алгоритмов управления, фильтрации и
помехозащиты, проведения подробного моделирования, в том числе модели-
рования БЦВМ на моделях-эмуляторах.
Был решен один из самых сложных вопросов создания этой ракеты-
обеспечение высокой точности наведения, достаточной для достижения за-
данной эффективности при небольшой по массе боевой части в условиях пло-
хого качества сигнала, отражающего специфику АРГС. В 1994 г. после ус-
пешного завершения Государственных испытаний ракета была принята на
вооружение (под обозначением РВВ-АЕ).
2.6. Российские истребители в локальных войнах
2.6.1. Применение российских истребителей
в реальных боевых действиях
Об опыте применения российского вооружения и боевой техники в воен-
ных конфликтах за рубежом говорить в открытой печати до недавнего времени
было не принято. Хотя, как известно, российские боевые самолеты, сухопутная
и морская техника принимали самое непосредственное участие в событиях в
Корее, Вьетнаме, на Ближнем Востоке, в других горячих точках планеты.
Истребитель МиГ-15
Пауза в боевом применении истребителей после второй мировой войны
длилась всего пять лет. Не успели еще историки дописать труды о прошед-
ших сражениях, как в небе далекой Кореи разразились новые. Был открыт
счет широкомасштабным войнам, которые потрясали мир регулярно в каждом
последующем десятилетии.
Многие специалисты называют эти локальные войны своеобразными по-
лигонами для испытаний новой боевой техники. По отношению к начавшейся в
июле 1950 г. войне в Корее это определение подходило в полной мере. Впер-
вые проверяли свои боевые возможности реактивные истребители, самолеты-
разведчики, истребители-бомбардировщики. Особое значение придавалось
противоборству советского МиГ-15 и американского самолета "Сейбр" (F-86).
За три года войны в Корее летчики 64-го истребительного авиационного
корпуса провели 1872 воздушных боя, сбили 1106 самолетов американского
производства, из них 650 самолетов "Сейбр". Потери МиГ-15 составили 335
самолетов.
Самолеты МиГ-15 и F-86 "Сейбр" - представители первого поколения ре-
активных истребителей, мало отличавшиеся по своим боевым возможностям.
Наш самолет был легче на 2,5 т (взлетная масса 5044 кг), однако увеличенная
масса самолета "Сейбр" компенсировалась большой тягой двигателя (4090 кг
против 2700 кг у МиГ-15). Тяговооруженность у них была практически оди-
наковой - 0,54 и 0,53, как и максимальная скорость 1100 км/ч. На большой
высоте МиГ-15 получал преимущество в разгоне и скороподъемности, а
"Сейбр" лучше маневрировал на малой высоте. Он мог также более продол-
жительное время находиться в воздухе, располагая 1,5 т "лишнего" топливах
Установка реактивных двигателей на самолеты и реализация в их конст-
рукции последних достижений аэродинамики сделали "рабочим" околозвуко-
220
вой диапазон скоростного полета. Истребители вторглись в стратосферу
(практический потолок самолета "Сейбр" - 12 000 м, а МиГ-15 - 15 000 м).
Разные подходы были очевидны только в вопросах вооружения. МиГ-15
имел одну 37-мм и две 23-мм пушки, "Сейбр" - шесть 12,7-мм пулеметов
(в конце войны появились самолеты "Сейбр" с четырьмя 20-мм пушками).
В целом анализ "анкетных" данных не позволял даже искушенному эксперту
определить потенциального победителя. Ответ могла дать только практика.
Уже первые бои показали, что вопреки прогнозам технический прогресс
кардинально не изменил форм и содержания вооруженного противоборства в
воздухе. Бой сохранил все традиции и закономерности прошлого. Он оставал-
ся ближним, маневренным, групповым.
Во многом это объяснялось тем, что вооружение истребителей качест-
венных изменений практически не претерпело. На борт реактивных самоле-
тов перекочевали пулеме-
ты и пушки с поршневых
истребителей - участников
второй мировой войны,
поэтому "убойная" даль-
ность и область возмож-
ных атак почти не измени-
лись. Относительная сла-
бость разового залпа
вынуждала, как и прежде,
компенсировать ее количе-
ством "стволов"— участ-
вующих в атаке самолетов.
Самолет МиГ-15 был
Истребитель МиГ-15 из 351 иап.
Аэродром Аньдун, Северная Корея. Осень 1952.
создан для воздушного
боя, т. е. полностью соответствовал своему целевому назначению. Конструк-
торы сохранили в самолете идеи, воплощенные еще в МиГ-1 и МиГ-3: ско-
рость-скороподъемность-высота, что позволяло летчику ориентироваться на
ярко выраженный наступательный бой. У наших летчиков не возникало со-
мнений в том, что они воюют на лучшем истребителе в мире.
Одной из сильных сторон самолета МиГ-15 был более высокий пора-
жающий потенциал, что позволяло ему иметь выигрыш на основном этапе
боя - атаке. Однако для победы требовалось накопить информационное и по-
зиционное преимущество на предыдущих этапах.
Летчик (ведущий группы) мог захватить инициативу и начать диктовать
самолетам "Сейбр" свои условия, если первым получал сведения о противнике.
Резерв времени использовался для составления плана (замысла) боя, занятия
выгодной исходной позиции, перестроения боевого порядка. В этом летчику
помогал наземный командный пункт, располагавший техническими средства-
ми дальнего обнаружения. Перед установлением ближнего зрительного кон-
такта с "Сейбр" боевой расчет КП информировал летчика об обстановке и ме-
стонахождении всех обнаруженных целей. Самолет МиГ-15, располагая не-
сколько большим избытком тяги (особенно на большой высоте), мог быстрее
самолета "Сейбр" сократить дистанцию и подойти к противнику. Скрытность
обеспечивалась камуфляжной окраской самолета ("под местность" - сверху,
221
"под небо" - снизу). Тактические требования обязывали умело использовать
солнце и облака, варьировать плотностью построений самолетов в воздухе.
Прямолинейный полет, совмещавший встречное сближение с атакой, стал
возможным только через тридцать лет - после оснащения истребителей радио-
локаторами и ракетами средней дальности. МиГ-15 сочетал сближение с кру-
тым маневром в заднюю полусферу противника. Если "Сейбр" замечал МиГ-15
на безопасном расстоянии, то стремился навязать ему маневренный бой (осо-
бенно на малых высотах), который нашему истребителю был невыгоден.
Хотя МиГ-15 несколько проигрывал самолету "Сейбр" в горизонтальном
маневре, но не настолько, чтобы отказываться от него при необходимости. Ак-
тивность обороны связывалась со слетанностью пары и реализацией тактиче-
ского (организационного) принципа "меча" и "щита". Функция первого - атака,
второго - прикрытие. Опыт показывал - неразрывная и согласованно дейст-
вующая пара самолетов МиГ-15 неуязвима в ближнем маневренном бою.
В трехэлементном построении эскадрильи пара или звено должны были
выполнять еще одну функцию, которая считалась многоцелевой: наращива-
ние усилий, резерв, свободный маневр. Пара держалась выше остальных са-
молетов, имея широкий обзор, и
была готова первой устранить угро-
зу внезапного нападения, а также
поддержать "меч" или "щит" при
необходимости. Продуктом творче-
ской мысли летчиков была новая
"организация" - шестерка истреби-
телей с распределением функций,
аналогичных для эскадрильи. Этот
опыт был впоследствии перенят и
успешно использован сирийскими
летчиками на МиГ-21 в октябрьской
войне 1973 г. на Ближнем Востоке.
Во время корейской войны бое-
вые расчеты наземных командных
пунктов стали полноправными уча-
стниками воздушного боя. Решение
на вылет эскадрильи принимал
обычно командный пункт корпуса после обнаружения воздушного противника
на пределе "видимости" наземных радиолокаторов, расположенных на своей
(китайской) территории. Наблюдавший за обстановкой по экрану обзорной
РЛС штурман наведения выводил истребители на рубеж ввода в бой. Ведуще-
му группы давалась сначала осведомительная, а затем командная информация.
Первая (о противнике) принималась к сведению, вторая исполнялась. КП стре-
мился обеспечить МиГ-15 тактически выгодное положение перед установлени-
ем визуального контакта с самолетами "Сейбр". Зрительно обнаружив цель, ве-
дущий принимал управление на себя; за КП оставалась функция оповещения.
Порядок ввода в бой зависел от расстановки сил противника и расстояния
до него. Самолеты "Сейбр" не подчинялись стандартам, меняли структуру По-
строения в воздухе. Поэтому наивыгоднейший вариант "удар-прикрытие-на-
ращиванис усилий" мог оказаться проигрышным. Смена замысла должна бы-
ла происходить мгновенно, ибо времени на раздумье не оставалось.
Спустя много лет после войны в Корее
МиГ-15 и F-86 "Сейбр" в одном строю [2.14]
222
После вклинивания в боевой порядок самолетов "Сейбр" бой распадался
на звеньевые, а затем и парные схватки. Командир эскадрильи, занятый уже
"своим" противником, не мог контролировать действия всех подчиненных.
Происходила преднамеренная децентрализация управления. Командиры
звеньев получали самостоятельность - право принимать решения "по обста-
новке". Командный пункт оповещал о подходе резервов противника, следил
за временем (остатком топлива) и мог выводить истребители из боя. Для при-
крытия отхода высылались дополнительные силы.
Важно заметить, что все командиры дивизий и большинство командиров
полков МиГ-15 участвовали в Великой Отечественной войне, владели навы-
ками оперативного руководства.
Успех летчиков, воевавших на реактивных МиГ-15, определяли техника,
возможности которой полностью соответствовали условиям боевых действий;
максимальное использование сильных сторон своего оружия; рациональная
тактика (теория и практика боя); налаженное взаимодействие, умение коман-
диров распоряжаться в воздухе вверенными ему ресурсами, максимальное
использование опыта Великой Отечественной войны.
Необходимо раскрыть и причины боевых потерь. Отметим, что из 335
сбитых МиГ-15 большой процент (более половины) связан со случаями бла-
гополучного покидания поврежденного (потерявшего управление) самолета
летчиком. Почти все они возвращались в строй и с почтением отзывались о
надежности и простоте системы катапультирования МиГ-15.
Большая доля понесенных потерь приходится на посадку. Аэродромы
первой линии располагались близко к морю, а со стороны моря МиГ-15 захо-
дить запрещалось. Вот там и сосредоточивались "Сейбр" со специальным
заданием - атаковать над аэродромом. На посадочной прямой самолет нахо-
дился с выпущенными шасси и закрылками, т. е. не был готов отразить атаку
или уклониться от нее. Качество техники и уровень подготовки летчика теря-
ли в этой вынужденной ситуации свою роль.
Истребитель МиГ-21
Сверхзвуковой ракетоносец МиГ-21 - ветеран локальных войн с длинным
послужным списком. В его биографию занесены сражения в Юго-Восточной
и Южной Азии, на Ближнем Востоке и в Африке. МиГ-21 вел спор огнем с
истребителями, стратегическими и тактическими бомбардировщиками,
штурмовиками и истребителями-бомбардировщиками. Проведено около ты-
сячи боев, большинство которых — результативные.
Рекламу МиГ-21, продолжающему свое существование в новых модифи-
кациях, создавали не показы на выставках, а победы в воздухе.
Имеется возможность осветить наиболее показательные противоборства:
МиГ-21 против самолетов F-4 "Фантом" 2, "Мираж" III и В-52 "Стратофортресс".
Против "Фантома". Боевая деятельность МиГ-21 началась во Вьетнаме
в апреле 1966 г. Традиционный период "врастания в обстановку" отсутство-
вал. Воевавшему в тяжелых условиях МиГ-17 требовалась немедленная под-
держка. В действительности произошел перелом, который подтверждают ко-
личественные показатели. За первые четыре месяца 1966 г. самолеты МиГ-17
сбили 11 американских самолетов, а сами потеряли 9 (соотношение 1,2:1).
223
С мая по декабрь, после ввода в бой МиГ-21, потери противника возросли: 47
сбитых самолетов против 12 самолетов МиГ. Соотношение резко изменилось
и достигло 4:1.
Американское командование во Вьетнаме среагировало на неожиданный
поворот событий организацией новой системы подготовки летного состава (на
континенте), вводом в действие средств боевого управления воздушного бази-
рования, оснащением боевых самолетов подвесными пушками и контейнерным
передатчиком помех. После длительной оперативной паузы (1968-1971 гг.) до
конца войны (январь 1973 г.) МиГ-21 воевал уже в экстремальных условиях.
За восемь лет войны северо-вьетнамские истребители (МиГ-17, МиГ-21,
эпизодически - МиГ-19 китайского производства) провели в общей сложно-
сти 480 воздушных боев, сбили 350 самолетов противника и потеряли 131
(соотношение 2,3:1). Выделить отдельное число и результаты боев между
МиГ-21 и "Фантомом" уже сложно, но достоверно соотношение 1,4:1 в пользу
северо-вьетнамского истребителя. Казалось бы, говорить о громкой победе
при таком скромном балансе нельзя. Но успех МиГ достигнут при шести-
кратном численном превосходстве противника.
Вьетнамская война отошла в историю. Статистики подсчитали потери,
аналитики вскрыли причины, конструкторы выявили недостатки современ-
ных боевых комплексов. Однако за кадром осталось столкновение разных
концепций в техническом оснащении ВВС, облике и назначении самолетов.
МиГ-21
Создатели самолета "Фантом" (основного "оппонента" МиГ-21) считали,
что технический прогресс позволял совместить в одном самолете две разно-
плановые функции: поражение (с равным успехом) как воздушных, так и на-
земных целей. Идея была реализована в металле, и "Фантом" прибыл во Вьет-
нам с вывеской "многофункциональный". При выполнении заданий в роли ис-
требителя он брал комплект оружия класса "воздух-воздух", а в роли
бомбардировщика "воздух-поверхность". Приспособленность к ударным дей-
ствиям отразилась на технических характеристиках: самолет имел далеко нс
"истребительную" нагрузку на крыло (490 кг/м2), которая возрастала после
подвески шести авиабомб среднего калибра.
"Лишний" вес не должен был препятствовать ведению боя, который
представлялся уже в ультрасовременном виде: одноразовая ракетная атака на
224
догоне. Маневрирование противников на коротких дистанциях (ближний бой)
"резвая" теория уже отменила, сопроводив неординарные выводы снятием
пушек с истребителей.
Концепции мирного времени не оправдались на войне. Ориентированно-
го своими характеристиками на наступление "Фантом" сразу заставили обо-
роняться. Собиравшийся только атаковать подвергался атакам сам. Ракеты
средней дальности "Спэрроу" (1-го поколения) не применялись из-за ограни-
чений по перегрузке самолета-носителя и по минимальной дальности пуска.
Оставшиеся на борту ракеты "Сайдуиндер" с инфракрасными головками об-
рекали на ведение только ближнего боя с традиционными попытками зайти
противнику крутыми маневрами в хвост. А маневра как раз и "не хватало".
Тяжелый "Фантом" не тянуло на вертикаль; выигрыш в разгоне, необхо-
димый для отрыва, также не обозначался. Переход в область малых скоростей
в развернувшихся ближних боях, насыщенных форсированными разворотами
с торможением, быстро приводил к предштопорному состоянию. Как писали
ехидные обозреватели, экипажу "Фантома" приходилось бороться на два
фронта: с МиГами и со своими недостатками.
Конструктор МиГ-21 не стал совмещать несовместимые функции, оста-
вив самолету строго целевое назначение. Не обремененный ударными зада-
чами, МиГ-21 был "легче" самолета "Фантом" на 150 кг/м2, а значит манев-
реннее. При примерно одинаковой тяговооруженности и поражающих воз-
можностях это обеспечивало луч-
шую выживаемоеть. Остальное за-
висело от умения летчика исполь-
зовать сильные стороны техники и
от правильного выбора тактики.
В зарубежных материалах о
вьетнамской войне тактика само-
летов МиГ часто характеризова-
лась как партизанская. Доля прав-
ды в этом есть, так как массовый
открытый отпор воздушному аг-
рессору (при его подавляющем
F-4 "Фантом"2
численном перевесе) даже не планировался. На самом деле к руководству бы-
ли приняты и неукоснительно исполнялись тактические принципы внезапно-
сти и экономного расхода сил. "Классика" военного искусства лишь приспо-
сабливалась к конкретным (специфическим) условиям локальной войны.
Нападение на сильного противника в меньшинстве читатель может на-
звать авантюрным, поэтому в поисках объективности обратимся к зарубежной
прессе. Журнал "Aviation Week" писал следующее: "Стремление к мощности
и скоротечности ударов заставляло сводить американских бомбардировщиков
в плотные группы и сопровождать их истребителями. Внешняя подвеска уве-
личивала лобовое сопротивление и уменьшала скорость полета. Эскорт сле-
довал на дистанции зрительной связи и прикрывал ударную группу "живо-
том". МиГ-21 сближались сзади на "сверхзвуке" и, оставаясь неуязвимыми,
атаковали ракетами стесненных в маневре "Фантомов". Коронный тактиче-
ский прием МиГов был известен, но противопоставить ему эффективные ме-
ры защиты не предс гавлялось возможным".
225
15-4094
Следует заметить, что самолеты "Фантом" снизили темпы убывания сво-
ей численности после внедрения в сферу боя средств радиоэлектронной борь-
бы. Экраны радиолокационных прицелов МиГ-21 "засвечивались" нередко
полностью, исключая выделение метки цели. Поэтому большинство атак в за-
ключительном периоде войны северо-вьетнамские летчики наносили зри-
тельно- по коллиматорному прицелу-визиру. Была еще одна причина: при
включении радиолокационного прицела на излучение срабатывали бортовые
средства оповещения "Фантома", расчет на внезапность атаки срывался.
Против В-52. Вооруженное столкновение сверхзвукового истребителя со
стратегическим бомбардировщиком - явление уникальное. Оно происходило
во Вьетнаме и не повторялось позже ни в одной локальной войне. Описание
процесса нестандартного боя целесообразно предварить краткой характери-
стикой сложившейся в воздухе обстановки.
К концу 1972 г. шел уже восьмой год войны (седьмой- с участием
МиГ-21). За это продолжительное время тактической и палубной авиации
США даже массированными бомбардировками не удалось достичь постав-
ленных целей. ПВО Северного Вьетнама не только стойко сопротивлялась, но
и наращивала усилия в борьбе с агрессором.
Тогда командование США решило повысить мощность воздушных уда-
ров, доставлять "на север" втрое большее количество бомб. Так в малой войне
появились большие самолеты. После не принесшей ожидаемого результата
воздушной операции "Лейнбакер-1" (март-апрель 1972 г.) была запланирова-
на операция "Лейнбакер-2". Основное место отводилось в ней стратегическим
бомбардировщикам В-52, до этого действовавшим эпизодически.
В первые сутки операции на перехват обнаруженной групповой цепи,
прикрытой помехами, взлетел дежурный МиГ-21. На максимальном режиме
работы двигателей (форсаж не включался с целью экономии топлива) летчик
набрал высоту 6000 м, начал маневр выхода на попутные с целью курсы сза-
ди-снизу. Противника обнаружил по навигационным огням (очевидно, амери-
канский летчик об угрозе атаки оповещен не был). Бомбардировщик находил-
ся впереди справа на удалении 15...20 км. Получив указание с КП начать ата-
ку, летчик включил форсаж, сбросил подвесные баки и перешел на сближение
с выравниванием высот. Когда до цели оставалось 10... 12 км, поступила ко-
манда включить прицел "на высокое". Через 3...5 с бомбардировщик выклю-
чил огни, а экран прицела РП-21 полностью забили помехи; метка цели скры-
лась на их фоне. Летчик доложил об изменении ситуации, но продолжал
сближение (не отслеживая уже цель). Неожиданно рядом с плоскостью разо-
рвалась ракета, выпущенная, очевидно, с самолета "Фантом" из группы эс-
корта, потом еще одна. Летчик выполнил маневр уклонения, прекратил пре-
следование бомбардировщика.
Через несколько дней снова на перехват самолетов В-52 был поднят ис-
требитель МиГ-21. Набор 10 000 м он произвел по стандартной схеме на мак-
симальном режиме с "площадкой" на высоте 5000 м, при выполнении которой
сбросил подвесные баки и включил форсаж. На втором этапе набора, пример-
но на высоте 6000 м, обнаружил бомбардировщик по включенным аэронави-
гационным огням. Не теряя световой ориентир из виду, начал расчетный^ ма-
невр с креном 35...40° на скорости 1200 км/ч, прицел РП-21 на излучение не
включал. Маневр закончил на высоте 10 000 м сзади цели, сопровождаемой
226
визуально, на дальности 2500 м перешел на сближение при скорости
1300 км/ч, произвел грубую наводку по визиру (коллиматорному прицелу),
захватил цель и пустил две ракеты. Обе попали в В-52. Выход из атаки осу-
ществил полупереворотом, занял высоту 3000 м и благополучно произвел по-
садку на своем аэродроме.
На следующую ночь с полевого аэродрома, не подвергшегося бомбарди-
ровкам, поднялся на перехват истребитель МиГ-21. Наведение осуществля-
лось с передового командного пункта, набор высоты производился по стан-
дартной схеме. Достигнув высоты 7000 м, летчик доложил на пункт наведе-
ния, что обнаружил аэронавигационные огни бомбардировщика. Цель
следовала на эшелоне 10 000 м и находилась справа по курсу. В момент нача-
ла расчетного маневра экипаж В-52 выключил огни (хотя прицел РП-21 на
излучение не включался). Предположительно, сработала служба подслушива-
ния или система защиты хвоста. Летчик сообщил по радио о случившемся, и
это был его последний доклад. На экране РЛС пункта наведения метки само-
летов пропали; по обломкам МиГ-21 и В-52, расположившимся рядом на зем-
ле, было установлено, что они столкнулись в воздухе.
Всего МиГ-21 произвели шесть ночных вылетов на перехват В-52, четыре
из них сорвались, один завершился уничтожением цели и один — тараном (ос-
тальные В-52 были сбиты зенитными ракетами). Американское командование
признало потери 15 стратегических бомбардировщиков В-52 за 12 суток опе-
рации.
Против "Миража". За пять лет до окончания вьетнамской войны само-
лет МиГ-21 в рядах ВВС арабских стран начал противоборство с другим рс-
актвным самолетом 2-го поколения - израильским "Миражом". Новый воз-
душный противник качественно отличался от американского самолета "Фан-
том". Он относился к ис-
требителям целевого на-
значения. Малая нагрузка
на дельтовидное крыло
(менее 300 кг/м2), встроен-
ная 30-мм пушка, непло-
хие пилотажные характе-
ристики, тепловые ракеты
обеспечивали самолету
"Мираж" эффективное ве-
дение маневренного боя. Но израильский самолет несколько уступал МиГ-21
в тяговооруженности, что означало отставание в скороподъемности и разгоне
скорости в бою. Этот разрыв увеличивался в диапазоне больших высот.
Избыток тяги в умелых руках летчика МиГ-21 позволял контролировать
дистанцию до противника, т. е. быстрее сближаться или отрываться от него.
Это было важно, так как длительное маневрирование с разворотливым само-
летом "Мираж" обрекало на проигрыш позиции. Главным приемом в тактике
противоборства являлась "серия атак" с сохранением энергии, т.с. способно-
сти к дальнейшему ускорению.
Если качества МиГ-21 как перехватчика полностью раскрылись во вьет-
намской войне, то в октябрьской войне 1973 г. на Ближнем Востоке он пока-
зал себя как отличный истребитель. В течение 18 суток войны над Голански-
Дассо "Мираж" III
227
15*
ми высотами и Ливаном сирийскими летчиками было проведено 260 воздуш-
ных боев, в результате которых потери противника составили 105 самолетов,
а собственные - 57. При исходном равенстве сил успехи были обусловлены,
прежде всего, качественной подготовкой летного состава, которая проходила
по специальной программе: детально изучался противник; в полном объеме
усваивались возможности МиГ-21; осваивались элементы группового манев-
ренного боя и пилотажа на критических режимах.
За этими общими словами на самом деле скрывалось глубокое содержа-
ние. "Детальное изучение противника" сопровождалось рабочими контактами
с дружественными ливийскими ВВС, имевшими в своем составе эскадрилью
самолетов "Мираж". В программе подготовки к бою заимствовались упраж-
нения и типовые приемы ("брейк", "реверс", "слип" и т. д.), отрабатывавшиеся
американскими летчиками на курсах переподготовки (курсы были созданы
после неудач в борьбе с МиГ во Вьетнаме). Кстати, при практическом зна-
комстве с одним из приемов - "ха-джи-роул" ("высота-перегрузка бочка")
обнаружилось полное сходство с приемом, изобретенным русским асом По-
крышкиным в годы Великой Отечественной войны (за океаном воскресили
то, что было забыто у нас).
В первую неделю войны МиГ-21 попали в свою стихию: обстановка оп-
равдывала действия способом перехвата, хотя и опущенного на малые высоты
(именно в диапазоне низких высот израильские истребители "Фантом", со-
провождаемые самолетами "Мираж", наносили удары по сирийским аэродро-
мам). Ситуация напоминала вьетнамскую, когда эскорт только "отражал", а нс
нападал. Расчетливые ата-
Египет. Подготовка к вылету МиГ-21МФ
ки МиГ на подступах к
прикрываемым объектам,
результативный огонь но-
вых зенитно-ракетных
комплексов советского
производства заставили
противника отказаться от
завоевания превосходства
в воздухе традиционным
способом уничтожения
самолетов на земле. Им
стала использоваться так-
тика преднамеренного
группового маневренного
боя.
Сирийские летчики были готовы к подобному повороту событий. Еще в
ходе напряженных предвоенных тренировок выяснилось, что, создавая само-
лет-перехватчик, конструктор оставил МиГ-21 необходимые пилотажные ка-
чества. На критических режимах, свойственных для затяжного маневрирова-
ния, самолет сохранял устойчивость. В запретной области "срыва" не хотел
"сваливаться", если летчик не допускал грубейших ошибок. Не было и попа-
даний в штопор, хотя скорость иногда доводилась до близкой к посадочной.
В "позиционной" войне над Синаем в 1970 г. египетские летчики придер-
живались правила: "увидев "Мираж", не становись в вираж". Полностью овла-
228
девшие МиГ сирийские пилоты помнили о нем, но все-таки не избегали выгод-
ных для самолета "Мираж" вариантов маневренного боя. Так как встречная
атака еще не вошла в тактический арсенал истребителей из-за слабости оружия,
самолеты "Мираж" расчленялись на пары, стремясь получить свободу маневра,
а потом "каждый оставался с каждым". В дуэльных схватках противники кру-
тыми форсированными разворотами стремились выиграть позицию: быстро
"сжимались" радиусы и время маневров, падала скорость. МиГ-21 тянул
"Мираж" вверх, у последнего на больших углах атаки начинался помпаж дви-
гателя. Сирийскому летчику оставалось умело использовать созданное пре-
имущество в высоте. Конечно, только мастер мог перейти из этого положения в
атаку, однако безопасность (неуязвимость) гарантировалась.
Октябрьская война 1973 г. на Ближнем Востоке полностью восстановила
в правах ближний маневренный групповой бой. Одиночный перехват, под ко-
торый подгонялись характеристики реактивных истребителей 2-го поколения,
остался лишь "для ночи и облаков".
Истребитель МиГ-23
В июне 1982 г. началась очередная война на Ближнем Востоке. Отличи-
тельная черта ее - ведение израильскими и сирийскими войсками боевых дей-
ствий на территории третьего государства (Ливана). Авиация сторон решала
все традиционные задачи. Боевая работа велась с основных аэродромов бази-
рования, которые бомбардировкам на сей раз не подвергались. Удары с воздуха
наносились только по объектам, расположенным на ливанской территории.
После октябрьской войны 1973 г. израильские ВВС пополнились истреби-
телями 3-го поколения - F-15 и F-16, а также комплексами дальнего радиоло-
кационного обнаружения (ДРЛО) "Хокай". В ряды сирийских ВВС кроме вы-
сотного перехватчика МиГ-25 поступили самолеты МиГ-23 в вариантах истре-
бителя (МиГ-23МФ) и истребителя-бомбардировщика (МиГ-2 ЗБН). Ударную
мощь нарастили самолеты Су-22 (экспортный вариант Су-17).
Сравнение боевых возможностей будущих противников показывало, что
МиГ-23, имевший меньшую тяговооруженность и большую нагрузку на кры-
ло, уступал F-15 в скоро-
сти разворота в любой
плоскости. Не обнаружи-
вал он и преимущества в
огне - в дальности раз-
решенного пуска ракет с
радиолокационным наве-
дением. Ситуация напо-
минала начало Отечест-
венной войны, когда наш
И-16 боролся с "Мессер-
МиГ-23
шмиттом". Но "ишачки" тогда не собирались сдаваться, что воодушевляло на
поиски. Пришлось вернуться к уже опробованному варианту возмещения ка-
чества количеством. При отсутствии ЭВМ с помощью навигационной линей-
ки были вычерчены на кальке и подготовлены для облета графоаналитические
модели боев 2x1, 3x2.
229
Назначение МиГ-23МФ маловысотный перехватчик - определяло так-
тику. основным содержанием которой являлось обеспечиваемая другими эки-
пажами встречная атака с малой высоты. Готовивший атаку получал функции
"демонстративный" или "обзорный". В первом случае он, образно говоря, хо-
дил по лезвию бритвы, позволяя захватить себя противнику на сопровожде-
ние, но не допуская захода в зону пуска. Учитывалось, что F-15 сопровождал
только одну цель, закрепляя на ней узкий луч бортовой РЛС подсвета до мо-
мента подрыва ракеты. Это использовал ударный экипаж, на короткое время
оказывавшийся бесконтрольным. "Обзорный" же назначался при действиях
вне своего радиолокационного поля (создававшегося наземными РЛС). Его
обязанность - первым обнаружить противника и дать целеуказание ударному,
"скрывавшемуся" на малой высоте.
Относительная слабость огня заставляла заботиться и о поддержке атаки
третьим самолетом ("резервным"). Вводился он в боевой порядок после оцен-
ки сложившейся воздушной обстановки (отсюда и происхождение моделей
2x1 и 3x2). Учитывалось, что F-15 также выделяют резерв, но он остается
глубоко "в тылу" и подтягивается к очагу боя по указанию воздушного ко-
мандного пункта "Хокай". Таким образом, четвертому экипажу из штатного
состава звена (касается обеих воевавших сторон) во всеракурсном групповом
бою рабочих функций не доставалось. Традиционные обязанности "щита",
т. е. прикрытия, остались для ведомого только в ближнем маневренном бою.
В какой обстановке разворачивались реальные бои? Сигналом насторо-
женности служил выход израильских комплексов ДРЛО к берегам Ливана над
нейтральными водами. Вместе с ними в эшелон сил обеспечения включались
постановщики помех Боинг 707. Непосредственное прикрытие безоружных
тяжелых самолетов осуществляли пара или звено F-15 - все они располага-
лись в диапазоне средних высот и наблюдались сирийскими РЛС.
Далее на траверзе Бейрута выдвигался подвижный заслон - обычно два
звена истребителей F-15 и F-16. Зоны дежурства располагались ближе к бере-
гу, но на безопасном удалении от рубежа огня зенитных средств. Формирова-
ние боевой обстановки завершалось
выходом к наземным целям ударно-
го эшелона, составными элементами
которого были звенья самолетов
"Фантом", построенные в колонну.
Впереди - группа прорыва ПВО, за
ней носители высокоточного
управляемого оружия и, наконец,
бомбардировщики с неуправляемы-
ми боеприпасами.
Израильские самолеты следова-
ли над морем на высоте примерно
” 2000 м, поэтому не обнаруживались
Истребитель Макдоннел-Дуглас F-15A "Игл" сирийскими РЛС В диапазоне ВЫСОТ
до 3000 м из-за влияния горного
хребта. Перехватчикам МиГ-23 надлежало прорываться к израильским бом-
бардировщикам и предотвращать их удар по объектам сирийских войск, выве-
денных в Ливан. Но во всех разработанных вариантах прорыва выпадал важ-
230
ный тактический элемент - скрытность. После взлета со своего аэродрома са-
молеты МиГ-23 "засвечивались" израильскими воздушными КП "Хокай", едва
поднявшись на высоту 100 м. Чтобы не раскрывать противнику свой числен-
ный состав, тройка (пара) МиГ-23 смыкалась вплотную и наблюдалась на экра-
не РЛС как одна метка. На расчетном рубеже происходило размыкание, причем
ударный самолет снижался почти вертикально, что делало его незаметным для
РЛС. Далее в действие вводился один из отработанных вариантов (каждый
летчик знал свой маневр).
Плановые "ходы" должны были завершаться встречной ракетной атакой
"ударного" экипажа снизу. Если атака срывалась, то группе рекомендовалось
возвращаться на свою территорию. Эскадрилья истребителей МиГ-23МФ за
шесть дней ливанской войны совершила 52 самолето-вылета (6- в составе
тройки, 17 - в составе пары) и провела 7 воздушных боев. Сирийское командо-
вание утвердило сбитие 6 израильских самолетов, свои потери - также 6 само-
летов (два летчика погибли, четыре катапультировались из подбитых машин).
Интенсивность радиоэлектронного противодействия: в трех боях (из се-
ми) помехи отсутствовали, в трех - сильные помехи БРЛС, в одном - сильные
помехи по радиоканалу управления. Компоненты результативных атак: даль-
ность обнаружения цели БРЛС 9...25 км, дальность пуска ракет 5...9 км.
Три самолета МиГ-23 (из
шести) были сбиты в ходе при-
крытия объектов в Ливане спо-
собом "дежурство в воздухе".
Размещенные в долине Бекаа
зенитные ракетные комплексы,
окруженные горами, имели ог-
раниченную зону радиолокаци-
онного обнаружения, что долж-
ны были возместить воздушные
патрули. Простиравшаяся под
ними "слепая" область в обзоре
Истребитель Дженерал Дайнэмикс F-16A
"Файтинг Фолкон"
наземных РЛС скрывала атаковавшие снизу израильские истребители. По док-
ладу катапультировавшихся летчиков оборонительный маневр они предпри-
нять не успевали.
Причиной потери еще трех самолетов МиГ-23 явилось затягивание в
ближний маневренный бой после первой встречной атаки. Противник в этой
ситуации получал численное преимущество, подтягивая по указанию воздуш-
ного КП горячий резерв.
Израильтяне в очередной раз отошли от устоявшихся шаблонов. После
обнаружения сирийских МиГ-23 воздушный КП "Хокай" наводил на них пер-
выми не "дальнобойные" F-15, а легкие истребители F-16 с оружием малой
дальности. Звено F-16 по парам, вытягивавшимся в колонну, снижалось на
малую высоту, затем первая пара расходилась, окаймляя МиГ-23 с двух сто-
рон и угрожая атакой с задней полусферы (прием "сэндвич"). Возможными
для МиГ-23 оставались невыгодные варианты: выйти из боя и вернуться на
свою территорию; вступить в ближний бой с противником, превосходящим в
маневренности. В случае продолжения полета в район нанесения удара изра-
ильскими бомбардировщиками нависла явная угроза атаки в лоб истребите-
лями F-15 с применением ракет средней дальности.
231
В заключение необходимо отметить, что боевое применение МиГ-23
осуществлялось в условиях, не возникавших ранее в локальных войнах (в Ко-
рее, во Вьетнаме, а также в октябрьской войне на Ближнем Востоке). На от-
ставание в качестве техники накладывался информационный голод.
В ливанской войне приоритетным показателем, влияющим на результаты
боев, оказалось качество (в отличие от Вьетнама, где важнейшую роль играло
количество). Ввод в бой МиГ-23 осуществлялся осторожно, после тщательной
оценки воздушной обстановки и выявления благоприятных условий. В мень-
шей степени исполнителей сдерживали факторы "техника" и "оружие", в
большей - недостаток информации. Без воздушных командных пунктов, с ус-
таревшими средствами боевого управления руководить новыми самолетами
во всеракурсном бою было трудно. Вслепую, за пределами своего радиолока-
ционного поля (но в пределах радиолокационного поля противника) преды-
дущим поколениям истребителей воевать еще не приходилось. Участники со-
бытий воочию убедились в следующем: можно иметь самолет, оружие, лет-
чика, но не иметь данных о противнике, изготовившемся к бою. Тогда все
заложенные в боевой комплекс возможности остаются нереализованными.
Истребитель МиГ-25
Самолет МиГ-25 - последний из династии МиГов, проходивший обкатку
в локальных войнах на Ближнем Востоке. Он применялся на "египетском
фронте" во время арабо-израильской войны 1969 г. в качестве разведчика, а
также на "сирийском" - с соответствующим оборудованием и оружием в ка-
честве перехватчика.
О МиГ-25 в роли разведчика вспоминает участник событий летчик-
испытатель В. Гордиенко. "Самолет МиГ-25, - рассказывает он, - по своим
летно-тактическим данным в то время настолько превосходил существующие
в мире истребители, что оставалась лишь теоретическая возможность его пе-
М иГ-25
чивала эффективную работу как по воздушным,
при необходимости могла бы позволить пилоту
рехвата. В этом мы убеди-
лись, приступив к выпол-
нению конкретных боевых
задач воздушной разведки.
Самолет успешно справ-
лялся со всеми задачами.
Выдержали проверку и
бортовые средства радио-
электронной борьбы, не
раз спасавшие нам жизнь
в, казалось бы, безвыход-
ных ситуациях. Система
вооружения МиГ обеспе-
так и по наземным целям и
нанести бомбовый удар по
объектам или площадям с высоты в 20 тыс.м на скорости 2300 км/ч". Как рас-
сказывает Гордиенко, израильские пилоты на самолетах "Фантом" пытались
перехватывать их, как правило, из засад или из положения "дежурство в воз-
духе". Тщетно. Однажды в районе Суэцкого канала охоту за нашим самоле-
том устроили сразу несколько десятков истребителей. Попавшему в облаву
232
летчику пришлось выжимать из самолета все, на что он был способен, чтобы
уйти от погони. И это удалось. Кстати, в Египте нашими военными пилотами
было установлено несколько абсолютных рекордов высоты полета. К сожале-
нию, регистрировать их было некому.
К рассказу летчика-испытателя целесообразно сделать два дополнения.
При вторжении в воздушное пространство Израиля МиГ-25, набиравшие вы-
соту более 18 000 м над своей территорией, несколько раз обстреливались зе-
нитными ракетами комплексов "Хок". Однако все разрывы фиксировались
ниже траектории полета разведчика. Не могли также пересечься пути высот-
ного МиГ-25 и совершенно не тяготевшего к "высоте" истребителя-
бомбардировщика "Фантом".
Вторая страница в боевой биографии МиГ-25 открылась через одинна-
дцать лет в преддверии ливанской войны 1982 г. на Ближнем Востоке. Сирий-
ское командование вынашивало идею испытания своего высотного перехват-
чика. Такая возможность появилась в феврале 1981 г., когда противника так-
же обуревала идея проверки огнем своего нового истребителя F-15,
закупленного в США. Израильтяне материализовали замыслы в нескольких
отработанных на практике вариантах заманивания МиГ-25 в тактическую ло-
вушку. Демонстративные действия - провокации на вызов - переместились в
диапазон околостратосферных высот (10. ..12 км), участились случаи предна-
меренного нарушения воздушных границ Сирии со стороны моря.
Ниже следует описание эпизода из журнала боевых действий: " 13 февра-
ля 1981 г. над Ливаном появилась пара израильских разведчиков RF-4C и на-
чала перемещаться вдоль рубежа подъема на перехват в северном направле-
нии со скоростью 1000 км/ч на высоте 12 000 м. Навстречу нарушителям по
команде с центрального КП из зоны дежурства в воздухе вышел одиночный
МиГ-25. На эшелоне 8000 м он начал разгон, затем занял одну с целью высоту
на дистанции 110 км. Цель развернулась на обратный курс и оставила за со-
бой плотное облако дипольных отражателей, образовавшее пятно засветки на
экране РЛС наведения. МиГ-25 продолжал преследование отходящих на юг
разведчиков. Через минуту из "облака" помех вышла еще одна цель (высото-
мер дал первую засечку на 3000 м). Это был израильский F-15, находившийся
до этого в засаде за высоким горным хребтом. Расстояние между F-15 и
МиГ-25 сократилось до 50 км. Сирийский летчик (полностью освоивший но-
вую технику) обнаружить приближающегося снизу противника не мог из-за
ограничения обзора нижней полусферы бортовой РЛС. Команда на отворот,
поданная с земли, до летчика не дошла, так как в этот момент появились силь-
ные шумовые помехи по радио. На встречном сближении при наборе высоты
F-15 с дистанции 25 км произвел пуск ракеты и сбил МиГ-25. На месте падения
самолета в его левой плоскости обнаружили крупную дыру и нашли осколки
ракеты, на одном из которых можно было различить надпись "AIM-7F".
Так произошла первая в истории воздушных войн встречная ракетная ата-
ка. Как свидетельствуют записи, ее обеспечивали разведчики, предпринявшие
плановый демонстративный маневр и сбросившие пассивные помехи, а также
специализированный самолет радиоэлектронной борьбы, дежуривший над
морем вместе с воздушным КП "Хокай" и создавший шумовые помехи, кото-
рые нарушили управление МиГ-25. Таким образом, в сферу боя вторглись но-
вые элементы, непосредственно влиявшие на его исход. Изменилось и содер-
жание самого боя, что потребовало своевременной реакции.
233
В июле 1981 г., когда девятилетняя пауза между войнами на Ближнем
Востоке еще продолжалась, израильтяне в очередной провокации с наруше-
нием границы сменили расстановку сил и порядок действий. Демонстратив-
ные маневры вместо разведчиков выполнял одиночный F-15, а два других
(ударная группа) расположились в засаде вне зоны видимости сирийских на-
земных РЛС. Начальник штаба сирийских ВВС разработал ответный план
действий, который реализовывался следующим образом.
"Верхнего" F-15 стала вызывать на себя пара МиГ-21, а два самолета
МиГ-25 отправились в засаду - затененную зону в обзоре израильского воз-
душного КП "Хокай". F-15 "клюнул" на ложный вызов; на встречный с ним
курс пункт наведения вывел один МиГ-25, в то время как второй начал ма-
невр для нанесения удара во фланг. F-15, не меняя курса, неожиданно пере-
шел на снижение, увлекая за собой МиГ-25. Сирийский летчик в процессе боя
докладывал об обнаружении цели на расстоянии 80 км, захвате - на 40 км и о
последующем срыве захвата на снижении. Метки противников на экране РЛС
наведения слились, а затем пропали. Летчик МиГ-25 катапультировался "по-
сле удара" (как он доложил) и благополучно приземлился.
Второй МиГ-25 удар во фланг уже не наносил; к месту боя не успели и
израильские ударные самолеты. В непредвиденной заранее ситуации быстрее
разобрались на сирийском КП. Посчитав позицию более выгодной, решили
перевести МиГ-25 на сближение. Цель летчик обнаружил на расстоянии
40 км, захват произвел на 25 км, пуск первой ракеты - на 18 км, второй раке-
ты - на 11 км (бортовые средства контроля при дешифрировании подтверди-
ли попадание первой ракеты). Израильский летчик катапультировался над
морем. Сторожевые катера подобрали спасательный жилет и пакет с сигналь-
ными средствами, хранящийся в катапультном сиденье.
Первый результативный бой МиГ-25 продолжения не имел: самолеты
этого типа сирийское командование вывело за рамки боевых действий. При-
чина лежала на поверхности: в стратосфере, где раскрывались характеристики
МиГ-25 как перехватчика, никто не летал ("целей не было"). Несомненно, в
тех условиях, на которое рассчитывались боевые возможности самолета, ему
не было равных. Однако эти "условия" не нашли места в ограниченном воо-
руженном конфликте на Ближнем Востоке.
Боевой путь МиГов трех поколений - от "пятнадцатого" до "двадцать пя-
того" похож на полет истребителя с подъемами и снижениями. Успех присут-
ствовал там, где возможности самолетов и оружия соответствовали условиям
решаемых задач.
2.6.2. Опыт использования российских истребителей
в локальных войнах
Боевые задачи
В локальных войнах, где широкое применение нашли все новые (для сво-
его времени) авиационные боевые комплексы, истребительная авиация реша-
ла следующие боевые задачи: прикрытие войск и объектов в тактической глу-
бине; сопровождение ударных групп бомбардировщиков (эскортирование);
234
обеспечение транспортных эшелонов и воздушно-штурмовых бригад [2.18,
2.24-2.26]. Подразделения и части северо-вьетнамских, сирийских и египет-
ских ВВС, оснащавшиеся самолетами российского производства МиГ-21,
МиГ-23 и МиГ-25, подавляющую часть своего боевого ресурса затратили на
выполнение задачи прикрытия (сирийские истребители МиГ-21 получили не-
который опыт сопровождения ударных групп самолетов Су-22).
Способы прикрытия
В локальных войнах во Вьетнаме и на Ближнем Востоке в борьбе с авиа-
цией противника, а также при отражении групповых (массированных) нале-
тов истребители применяли следующие способы прикрытия войск и объектов:
• перехват на заданном рубеже;
• заслоны на опасных направлениях;
• расчистка воздушного пространства;
• действия из засад на земле и в воздухе;
• свободная охота.
С учетом специфических особенностей региональных конфликтов, "гео-
графии" театра военных действий, количественного состава задействованных
сил данные способы могли отличаться от "классических" и иметь свои осо-
бенности.
Уставы и наставления, регламентирующие боевую деятельность истреби-
телей, ориентируются на ведение широкомасштабных войн и равное количе-
ственно-качественное соотношение противников. Однако длительная воз-
душная война во Вьетнаме, последние крупные вооруженные конфликты на
Ближнем и Среднем Востоке велись или при подавляющем численном пре-
восходстве одной из сторон, или при значительном качественном преимуще-
стве нападавших (агрессора).
Северо-вьетнамские летчики, воевавшие на дозвуковых истребителях
МиГ-17 (с пушечным вооружением) и перехватчиках МиГ-21, не смогли вос-
препятствовать бомбардировкам Ханоя и Хайфона американской авиацией,
находясь в шестикратном меньшинстве. Однако пары (реже звенья) МиГ-21,
вступая в неравный бой с американскими самолетами "Фантом", "Тандерчиф"
и "Крусейдер", добились положительного результата, что признано самим аг-
рессором. Сирийские истребители МиГ-23, составлявшие всего десятую часть
самолетного парка (остальные - МиГ-21 и МиГ-17), выдержали на равных
борьбу с израильскими F-15 и F-16, хотя им не помогали ни воздушные ко-
мандные пункты, обеспечивающие "дальней" информацией о противнике, ни
самолеты радиоэлектронной борьбы, "ослепляющие" противника помехами.
Перехват на заданном рубеже. По своей организации и практическому
исполнению этот способ мало отличался от "уставного". Заданный рубеж пе-
рехвата выносился вперед по отношению к прикрываемому объекту на рас-
стояние, исключавшее нанесение по нему воздушного удара. Еще дальше в
глубину выдвигался потребный рубеж обнаружения и рубеж подъема. Рас-
стояние между рубежами определялось пассивным временем (запуск двигате-
лей, выруливание, взлет) и временем сближения (набор высоты, полет к це-
ли). Дефицит времени обрекал на применение способа дежурства в воздухе -
235
неэкономного и обременительного, наличие времени ("запас") позволяло ор-
ганизовывать дежурство истребителей на аэродроме.
Чтобы расположить рубежи обнаружения и перехвата на заданном удале-
нии, требовалось расширить информационное поле. Поэтому система опове-
щения базировалась на передовые радиолокационные посты, первыми "засе-
кавшие" воздушных нарушителей и передававшие сведения на основной
пункт управления (центральный командный пункт). Его боевой расчет анали-
зировал обстановку и поднимал дежурные истребители на перехват.
Тактика перехвата (днем всегда группового, ночью - одиночного) зави-
села от быстроты реакции истребителей. Позднее обнаружение противника
оставляло надежду только на встречную (лобовую) атаку. Запас времени от-
крывал относительную или полную свободу для пространственного маневра.
Ракетная атака в лоб была реальной только для самолета МиГ-25, поскольку
МиГ-21 не обладал оружием средней дальности, а МиГ-23 уступал F-15 в
дальности пуска управляемых ракет с радиолокационным наведением. С
учетом располагаемых поражающих возможностей истребителей "перехват"
в обычном понимании этого способа превращался в "ввод в бой на заданном
рубеже" с набором типовых тактических приемов, соответствовавших воз-
никшим боевым ситуациям.
Наиболее часто при вводе в групповой бой перехватчиками применялись
способы "клешня" и "дракон". Первый способ предполагал деление "сил от-
ражения" на две тактические группы - отсечения и ударную. Истребители от-
сечения "косым" маневром отделяли эскорт противника от бомбардировщи-
ков, а ударная группа, используя образовавшуюся "брешь", атаковала носите-
ли средств поражения класса "воздух-земля". Второй способ ("дракон") был
связан уже с тройным делением истребителей и применялся при достаточно
большом запасе времени. Третья тактическая группа совершала обходной ма-
невр и наносила удар в самое уязвимое место противника - в оставшуюся не-
защищенной заднюю полусферу.
Опыт локальных войн свидетельствует, что эффективность перехвата в
равной степени зависела как от тактико-технических характеристик и пора-
жающих возможностей самолета, так и от информационного обеспечения-
размеров создаваемого радиолокационного поля. Информационная недоста-
точность сводила на нет выдающиеся качества самолета и оружия, не позво-
ляла раскрыться мастерству летного состава. Перехватчик никогда не прини-
мал решение на взлет самостоятельно. Он поднимался на задание по команде
пункта управления, "питавшегося" дальней информацией об обстановке. Опо-
здание с подъемом, неточные данные по ситуации, ошибочная идентифика-
ция противника, помехи - это факторы, не зависевшие от достоинств МиГ-21,
МиГ-23, МиГ-25, но непосредственно влиявшие на результаты действий спо-
собом перехвата.
Заслоны и расчистка воздушного пространства. Заслон - один из спо-
собов прикрытия, применявшихся истребителями в ходе оперативного взаи-
модействия с ударными силами авиации. Звенья самолетов с упреждением по
времени относительно бомбардировщиков "окаймляли" район расположения
наземных целей на двух-трех наиболее опасных направлениях. Типовое по-
строение - в два яруса по высоте с обеспечением взаимной поддержки. Обя-
зательным условием являлось нахождение в своем радиолокационном поле
под контролем пункта управления, наблюдавшего за обстановкой и опове-
236
щавшего истребителей заслона о возникающей угрозе. Подвижные заслоны
выставлялись также в районах высадки вертолетных тактических десантов.
Если истребители к моменту занятия исходных позиций встречали противо-
действие со стороны самолетов противника, то производилась расчистка воз-
душного пространства.
Действия из засад на земле и в воздухе. Засады - способ, пришедший из
далекого прошлого, сначала исчезнувший, а затем "воскресший" в локальных
войнах (вместе с другими способами партизанской борьбы). Использовали
его и северо-вьетнамские истребители. Обстановка не позволяла вступать в
открытый бой с численно превосходящим противником на заданных рубежах.
Тогда звенья самолетов (МиГ-17, МиГ-21) в утренние сумерки скрытно, на
предельно малой высоте перелетали на передовые аэродромы, считавшиеся
противником не занятыми (или непригодными к эксплуатации). МиГ-21 ино-
гда доставлялись на вертолетах Ми-6 в подвешенном состоянии на изготов-
ленных в полевых условиях замках. Расчет строился на тактическую внезап-
ность, нападение на противника, находившегося еще в походном плотном
строю и не ожидавшего атаки. Сигнал на подъем давали "визуальные" посты
наблюдения по телефону (проводной связи). МиГ-21 взлетали с ускорителями
с рулежных дорожек. Несколько раз удавалось застать врасплох не готового к
отражению противника и добиться результата в скоротечном бою. Немало-
важно заметить, что перехваты из засад оказывали психологическое воздейст-
вие на противника. Экипажи американских самолетов ощущали угрозу напа-
дения "раньше времени" еще на маршрутном этапе полета к цели. Возраста-
ло нервное напряжение, притуплявшее бдительность и сковывавшее реакцию.
Пример, пришедший из другого театра войны: сирийские истребители
МиГ-21 сбили израильский штурмовик "Скайхок" из положения "скрытного"
дежурства на пустовавшем аэродроме вблизи Суэцкого канала.
Засады в воздухе - это вывод перехватчиков в зоны ожидания, располо-
женные в слепом секторе радиолокационного поля противника. Так называе-
мая затененная зона образовывалась из-за мешающего влияния превышений
местности. Горные хребты располагались на западной границе Северного
Вьетнама и на границе Сирии с Ливаном, т. е. на направлениях полетов про-
тивника. Наземные радиолокационные посты не просматривали диапазон ма-
лых и нижнюю часть диапазона средних высот. В затененные зоны в периоды
напряжения обстановки выводились северо-вьетнамские перехватчики
МиГ-21 и сирийские МиГ-23; и те и другие добивались успеха в ходе нанесе-
ния по противнику внезапных ракетных атак.
Свободная охота. Способ применялся сирийскими истребителями
МиГ-21 и МиГ-23. В периоды относительного затишья первые охотились за
израильскими "Фантомами", наносившими эпизодические групповые удары
по лагерям палестинцев на юге Ливана, а вторые - за беспилотными самоле-
тами-разведчиками, фотографировавшими районы предстоящих боевых дей-
ствий. Особенность "охоты" - полная самостоятельность в принятии решения
летчиком; переговоры по радио, обмен информацией с КП подслушивались
израильтянами. Открытое оповещении об угрозе означало прекращение зада-
ния. В целях накопления потенциала скрытности маршруты самолетов "Фан-
том" и беспилотных разведчиков, время их прибытия в район выполнения за-
дания предварительно записывались и изучались; вскрывался и использовался
шаблон в действиях противника.
237
Российские специалисты, готовившие эскадрилью МиГ-23 к бою, встре-
тились с тем, что способы перехвата беспилотных разведчиков (использовав-
шихся с нарастающей интенсивностью) ранее никогда не отрабатывались.
Атака беспилотных самолетов-разведчиков была возможна в основном на по-
путном или (реже) на встречном курсах. Эти беспилотные самолеты имеют
очень малую отражающую площадь и на экране прицела перехватчика могут
не просматриваться. При визуальном их обнаружении летчиком крайне за-
труднено прицеливание в момент начала программного маневрирования. Не-
большой опыт борьбы с беспилотными разведчиками, накопленный эскад-
рильей МиГ-23 (сбито два самолета при достаточно большом количестве хо-
лостых вылетов), остался невостребованным.
Важно отметить, что в основе способов заслонов, засад на земле и в воз-
духе, а также свободной охоты лежал способ перехвата. Этот классический
способ, не меняя формы, значительно трансформировал свое содержание в
локальных войнах.
Боевые порядки
При каждой очередной смене поколений истребителей боевые порядки
(расстановка сил перед началом группового воздушного боя) соответствовали
боевым возможностям самолетов и характеру решаемой задачи. Устойчивыми
оставались требования к боевому порядку. Главные из них: удобство управ-
ления и возможность быстрого перестроения при изменении обстановки,
обеспечение круговой осмотрительности и дальнего поиска, надежное взаи-
модействие (взаимная поддержка) и свобода маневра (противоистребительно-
го и противозенитного). Что менялось в боевом порядке?
Надо отметить постоянное его расчленение, что вызвано непрерывным
ростом скоростей и высот полета, связанным с ним пространственным разма-
хом маневра, а также расширением поражаюших возможностей бортового
оружия.
Когда самолет, оснащенный одним пулеметом, стрелял на 50 м и пример-
но таким же был радиус разворота, истребители сводились в плотные по-
строения. Огнем из пушки воздушный противник поражался уже с дальности
150...700 м, ракетой же с тепловой головкой - с дальности 1800 м. Возрос-
ший радиус разворота был соизмерим с этими величинами, боевые порядки
разомкнулись, но подчинялись требованию взаимной огневой поддержки. В
войне во Вьетнаме неожиданно возникло еще одно требование: исключить
поражение одной зенитной ракетой сразу двух самолетов. Чтобы выполнить
его, надо было обеспечить свободу противоракетного маневра, т. е. выделить
дополнительное воздушное пространство.
В разомкнутом строю ведомый уже не мог повторить все маневры ведуще-
го в одной плоскости и не потерять его из виду. Были пересмотрены правила
перестроения внутри группы, стала практиковаться смена пеленга на развороте
и даже смена ролей при атаке (в обстановке, требовавшей немедленной реак-
ции, ведомый, находясь ближе к противнику, атаковал его первым).
Опыт боев показал, что в процессе энергичного маневрирования постоян-
но сохранять огневую связь в паре стало очень трудно. Пришлось разрабаты-
вать типовые приемы, допускавшие временный ее разрыв с последующим
"плановым" восстановлением.
238
Преднамеренное рассредоточение самолетов перед боем за пределы зри-
тельной связи было характерно для реактивных истребителей 3-го поколения.
Иначе нельзя было полностью использовать возможности нового оружия -
управляемых ракет средней дальности. Однако под угрозой оказалась взаим-
ная огневая поддержка и даже тактическое взаимодействие.
Рассредоточенный боевой порядок включал группы различного тактиче-
ского назначения, каждая из которых совершала полет на наивыгоднейшем
для себя режиме. Визуальной связи между группами, как правило, не было,
каждая из них действовала в соответствии с общим планом удара, разработке
и реализации которого придавалось большое значение. Каждый ведущий
группы, не имея зрительного контакта с соседями, должен был четко предста-
вить их маневр на всех этапах боевого полета.
Опыт, поиск и проверка оптимальных вариантов дали "картину" расста-
новки сил современных истребителей перед боем.
Во-первых, она выходила за рамки обычных представлений о боевом по-
рядке как о размещении самолетов в группе на определенных дистанциях и
интервалах. Необходимость рассредоточения самолетов по глубине, фронту и
высоте сломала эти рамки. Однако требования к боевому порядку остались, и
выполнять их приходилось в резко изменившихся условиях.
Во-вторых, стремление к рассредоточению имело свои пределы, что обу-
словливалось сохранением взаимодействия между элементами боевого по-
рядка. Воздушные бои над Ливаном (как и все предыдущие) показали, что
взлетавший в составе группы, но непреднамеренно оставшийся в одиночестве
и потерявший связь истребитель обычно покидал поле боя.
В-третьих, рассредоточение группы, связанной единым тактическим за-
мыслом, в большинстве случаев предполагает сохранение устойчивого управ-
ления. Автономные (самостоятельные, ведущиеся при отсутствии информа-
ции от внешних источников о воздушной обстановке) действия доступны
только "охотникам".
В-четвертых, предусмотреть возможные изменения боевого порядка на
всех этапах полета истребителя, включая воздушный бой, нельзя. Однако рас-
становка сил перед боем подчиняется стандартизации, поэтому моделирование
этого этапа не только желательно, но и необходимо. На выходе моделирования
целесообразно иметь оптимальный вариант ввода в бой группы (самолета), ко-
торый прямо зависит от выбранного способа решения боевой задачи.
Кардинальные изменения в боевых порядках должны произойти с вводом
в строй многоканального оружия класса "воздух-воздух". Например, стано-
вится просто опасным типовое построение "фронт самолетов" при малых и
средних интервалах, обеспечивающее наилучшие условия поиска.
Особенности и этапы боевого полета
Боевой полет самолета любого назначения разделяется на пять основных
этапов: взлет и сбор группы; полет к цели или в район выполнения задания;
бой, удар, перехват, ведение разведки; обратный маршрут; роспуск и посадка.
Сохраняя подчиненность данному стандарту, боевой полет перехватчика име-
ет ряд характерных особенностей. Существенные коррективы вносят такие
факторы, как "противник", "управление" и "информация".
239
Противник для перехватчика - это разнотипные цели (бомбардировщик,
штурмовик, разведчик, истребитель). Под каждую цель с учетом ее активного
или пассивного противодействия подбираются свои приемы, оружие, виды атак.
Управление - это процесс, в основе которого лежит решение командира.
Истребителем управляет летчик, который изменяет положение самолета в
пространстве; летчиком командует ведущий группы, а последним руководит
орган управления. Динамичная схема с прямыми и обратными связями долж-
на функционировать быстро и надежно. Циклы управления перехватчиками
постоянно сокращаются по времени.
Информация применительно к боевому полету перехватчика - это сведе-
ния о воздушной обстановке в реальном времени, в первую очередь, о состоя-
нии противника. От полноты и своевременности информации, содержание
которой должно меняться на каждом последующем этапе полета, зависит ис-
ход (результаты) боевого задания. Летчику подается информация двух видов:
осведомительная и управляющая.
Выполнявшие боевые задачи современные самолеты обладали высокими
тактико-техническими характеристиками и поражающими возможностями.
Однако показатели их боевой эффективности оставляли желать лучшего.
Проведенный анализ показал прямое влияние слабостей "управления". Не
обеспечивалось выполнение традиционных требований к нему: твердость,
гибкость, непрерывность. Срывы управления, ошибки руководящего и летно-
го состава допускались как из-за несовершенства материальной базы, так и
из-за неподготовленности исполнителей.
Состояние материальной базы, обеспечивающей управление перехватчи-
ками МиГ-23 и МиГ-25 в конфликтах на Ближнем Востоке, можно представить
так: самолетами 3-го поколения приходилось руководить с помощью техниче-
ских средств 2-го поколения. Отсюда нехватка или отсутствие информации о
противнике (в реальном времени). Опыт однозначно показал, что перехватчик
должен быть элементом динамической системы управления, в которую кроме
него входят самолет дальнего обнаружения (воздушный командный пункт) и
самолет радиоэлектронной борьбы (постановщик активных помех). Функцио-
нирование системы происходит в следующей последовательности:
• обнаружение и идентификация противника (воздушный КП);
• передача сначала осведомительной, а затем управляющей информации
(целеуказания) перехватчикам;
• "ослепление" противника (самолет РЭБ) в момент начала сближения пе-
рехватчиков с целью;
• встречная ракетная атака перехватчика.
Рожденная боевым опытом система полностью оправдала себя и продол-
жает совершенствоваться. Поэтому целесообразно рассматривать боевой по-
лет современного перехватчика с учетом наличия такой синхронно функцио-
нирующей системы.
Взлет и сбор. Производятся по команде наземного пункта управления.
Летчик (командир группы) полностью занят пилотированием и контролем за
полетом других экипажей. Умственное напряжение "минимальное". Оргар
управления принимает решение по стандартной схеме: анализ поступающей
информации-оценка обстановки-выбор оптимального варианта действий-
команда перехватчикам на взлет.
240
Первый этап обоснованно относят к информационному. Боевой расчет
KI I из потока сведений об обстановке отсеивает относящиеся к выполняемой
задаче, вскрывает состав и намерения противника, делает "скачок в буду-
щее"- прогноз состояния групповой цели на рубеже перехвата с учетом ко-
личественно-качественного соотношения, определяет наряд сил "на отраже-
ние" и замысел операции. К моменту подачи команды на взлет известен ре-
зерв времени до ввода в бой, влияющий на формирование тактики (выбор
оптимальных приемов).
В ходе полета к цели пункт управления отслеживает противника, опре-
деляет назначение элементов групповой цели, передает командиру перехват-
чиков осведомительную информацию. Если на первом этапе процесс распо-
знавания ситуации заканчивался принятием решения на взлет, то на втором
этапе формируется решение по созданию боевой организации - группы пере-
хватчиков для совместных целенаправленных действий в предстоящем бою.
Организация складывается из структуры, ее ориентации и распределения
функций между составными элементами, имеющими неразрывные связи. На
практике организационное решение реализуется в виде перестроения боевого
порядки из походного (обычно сомкнутого) в предбоевой (разомкнутый) и
получения экипажами разных тактических назначений: демонстративной, от-
секающей, ударной, свободного маневра, наращивания усилий и других
групп. Экипажи занимают свои места в новой структуре заученными манев-
рами по условной команде. После перестроения между ними сохраняется ог-
невое или тактическое взаимодействие.
По мере сокращения дистанции до противника происходит вход в ра-
диолокационный контакт с ним перехватчиков. Опыт реальных боев выявил
две типовые ситуации, возникающие на этом рубеже. Первая (наиболее бла-
гоприятная), когда воздушный командный пункт полноезью контролирует
обстановку (отслеживает свои самолеты и самолеты противника) и выдает
перехватчикам управляющую информацию, подлежащую немедленному ис-
полнению. Вторая ситуация (наиболее сложная, но попадающая в разряд ти-
повых) характерна нарушениями связи (обмена информацией) с КП, умыш-
ленным "запутыванием" обстановки противником или интенсивной поста-
новкой помех. На командира группы перекладываются функции
распознавания ситуации в предстоящем очаге боя, выбора оптимального
тактического приема или варианта действий, последовательности ввода в
бой экипажей с разными заданиями, определения направления главного уда-
ра - в наиболее уязвимое место противника.
Именно в данной типовой ситуации перехватчик (командир группы), заня-
тый пилотированием самолета, испытывает пик умственного напряжения.
Важно заметить, что среди причин потерь самолетов в боях во Вьетнаме и на
Ближнем Востоке на первый план выдвинулись ошибочные решения, а не сла-
бости пилотирования или групповой слетанности. Летчик вышел на предел
своих психофизиологических возможностей. Даже опытному и тактически
грамотному человеку оказывается не под силу требуемая быстрота мышления.
Типовые задания на перехват в настоящее время предусматривают совер-
шение полета на полный боевой радиус с выходом из зоны контроля своих на-
земных или воздушных КП. Летчик преднамеренно обрекается на самостоя-
тельное добывание информации с помощью бортовых поисковых средств, на
241
16-4094
преобразование ее из осведомительной в управляющую. В этих условиях за-
медленная реакция на обстановку недопустима, а собственное радиолокацион-
ное поле ограничено. Отсюда возникает проблема интеллектуальной поддерж-
ки экипажа и создания бортовых экспертных систем (см. разд. 6).
Бой на средних дистанциях. Характерной чертой боя на средних дис-
танциях (100... 15 км) является его начало и окончание до рубежа установле-
ния зрительного контакта с противником и применение оружия класса "воз-
дух-воздух" средней дальности. Летчик ориентируется в обстановке и прини-
мает решение на вступление в бой по ее отображению на экране индикатора
бортовой РЛС или других бортовых средств. В основе тактики - встречная
ракетная атака, которая сливается со сближением. Энергичное маневрирова-
ние с крутыми разворотами и переменами мест с противниками исключается
из этапов боя. При срыве лобовой атаки все начинается снова, с этапа поиска
цели, "разорвавшей" радиолокационный контакт.
Первым переходит на сближение тот из противников, кто раньше обна-
ружил и идентифицировал цель. Упредить противника в начале сближения,
т. е. захватить инициативу, летчику помогают электроника и автоматика. Ма-
невр заключается в занятии позиции "строго в лоб". По мере увеличения кур-
сового угла (ракурса) преимущества, предоставленные оружием и радиолока-
ционной системой наведения, теряются из-за уменьшения скоростей сближе-
ния и дальности пуска ракет. Никто из противников не желает оказаться в
положении мишени, поэтому сокращенные дальности поиска цели и приме-
нения оружия компенсируются налаженным оповещением об угрозе нападе-
ния и построением нестандартных боевых порядков. Не меньшее значение
имеют искусственная (на фоне активных помех) и естественная (на фоне зем-
ли) маскировка.
Таким образом, бой на средних дистанциях начинается с соревнования
техники: чей радиолокатор дальше "увидит", чья система "свой-чужой" рань-
ше опознает. Недостатки электроники трудно компенсировать поражающей
мощью, поскольку без информации (сведений о местоположении и характе-
ристиках цели) дальнобойное оружие прицельно применить нельзя. Посмот-
рим на состав боекомплекта современного истребителя-перехватчика, несу-
щего боевое дежурство: ракеты малой и средней дальности разделены поров-
ну. Этим показана готовность вести как ближний, так и дальний бой в
возникающей типовой ситуации.
Реализация преимуществ нового оружия в практике реальных боев встре-
тилась с серьезными препятствиями. Итоги ливанского конфликта на Ближ-
нем Востоке, где открылась эра всеракурсного боя, показали, что из общего
количества произведенных атак только одна треть приходится на "лобовые".
Две трети заняли традиционные ближние маневренные бои с применением
ракет с ИК ГСН и пушек. Выяснение причин этого указало на противника,
который не захотел подставлять себя под атаки с дальних рубежей. Кроме то-
го, вскрылись и недостатки самого оружия.
Прицельный пуск производился только после захвата цели на автомати-
ческое сопровождение и отслеживания ее полета довольно продолжительное
(по меркам боя) время. Маневр уклонения (для выхода из "обнаружения" или
"захвата"), предпринятый целью, не позволял начинать сближение на дистан-
цию эффективного огня. Не было произведено также ни одного пуска в рс-
242
жиме обзора нижней полусферы, мешающее влияние "земли" оказалось на-
много большим. Система "свой-чужой" разбиралась в принадлежности цели
только при одиночном перехвате. Усложнение воздушной обстановки, пере-
крещивание траекторий полета "своих" и "чужих" ставило систему в тупик.
Вспомнился опыт Вьетнама, когда американским самолетам "Фантом" после
поражения двух своих самолетов разрешалась атака только визуально опо-
знанной цели (по внешним признакам).
Эксперты могли убедиться, что на языке тактики новое оружие - это
оружие внезапности. Неумение создать условия для неожиданной встречной
атаки, застать противника врасплох скрытностью или искусным тактическим
приемом оборачивается неудачей в бою. Принцип "техника - тактика" сохра-
няет свою объективность.
Многоканальное оружие должно сменить традиционную схему "один за-
ход-одна атака-один пуск" на "один заход-одна атака-несколько пусков".
Значительная часть усилий по перехвату перекладывается на ракету с актив-
ным наведением. Снизить эффект поражаемости может радиолокационная
малозаметность самолета. Задача новой технологии скрытности - "отобрать"
у атакующего значительную часть средней дистанции, перевести бой на визу-
альные контакты и маневрирование на коротких дистанциях, т. е. возвратить-
ся к традиционному ближнему бою.
Ближний маневренный бой. Признаками ближнего боя, имеющего бога-
тую историю, считаются визуальная связь между маневрирующими противни-
ками и применение оружия малой дальности - ракет класса "воздух-воздух" с
ИК-наведением и пушек. Наиболее вероятные условия начала ближнего боя:
• после срыва лобовой атаки, когда противники стремятся продолжить
противоборство;
• в случае обнаружения противника на короткой дистанции, исключающей
применение ракет средней дальности;
• в случае вступления в бой перехватчика со штурмовиком или вертолетом.
Из состава смешанного боекомплекта летчик выбирает ракеты с тепло-
выми ГСН или пушку. Головки ракет разарретируются, направляются по под-
вижной линии визирования на цель, захватывают ее; прицеливание осуществ-
ляется по ИЛС, пуск - по сигналу в наушниках.
В отличие от дальнего боя, начинающегося борьбой "за информацию", в
ближнем бою ведется борьба "за позицию". Наилучшее положение для атаки
(применения оружия) - сзади цели под малым ракурсом на короткой дистан-
ции. Чтобы вторгнуться в ограниченную область возможных атак, противни-
ки стремятся "переманеврировать" друг друга. Преимущество захватывает
тот, кто располагает большим избытком тяги и скоростью разворота в любой
плоскости.
Ближний бой основан на тесной и неразрывной связи маневра и огня. По-
пытки нарушить равноправие этих составляющих делались неоднократно, но
приводили к отрицательным результатам. Американские самолеты "Фантом",
превосходившие МиГ-21 в мощности огня, потерпели поражение в маневрен-
ных боях: чрезмерное затяжеление самолета снизило показатели выживаемо-
сти. Тяжело досталось также сирийским перехватчикам МиГ-23 в боях с лег-
кими истребителями F-16, а высотный перехватчик МиГ-25 вообще нс вво-
дился в подвижную обстановку боя на средних высотах.
243
16*
Как показал опыт, ближний бой имеет устойчивую тенденцию к уменьше-
нию высоты и скорости. Известно, что угловая скорость установившегося раз-
ворота, обеспечивающего длительное позиционное преимущество, лежит в
диапазоне скоростей, соответствующих числам М = 0,8 ±0,1. Сверхзвуковой
"бросок" предпринимался только при сближении или отрыве от противника,
однако участники боя в попытках быстрейшего выхода в область атак исполь-
зуют форсированные развороты. Умышленное торможение в ходе форсиро-
ванных, некоординированных разворотов выполняется ради увеличения мгно-
венной угловой скорости. Поступательная скорость падает. Высота ведения боя
теряется в попытках летчиков восстановить уровень энергии, "набрать" недос-
тающую скорость на снижении.
2.6.3. Результативность воздушных боев
с участием российских истребителей
Первый воздушный бой между реактивными истребителями состоялся в
ходе войны в Корее в 1950 г. В последующих локальных конфликтах, кото-
рые регулярно сотрясали мир во второй половине века, количество таких боев
достигало уже двух тысяч. Ввод в строй новых типов самолетов, авиационно-
го оружия, средств управления и боевого обеспечения существенно менял об-
лик боя. На смену ближним (пушечным) противоборствам пришли сначала
ракетные перехваты, а затем всеракурсные бои. Кроме того, наряду с манев-
ром и огнем теперь используется радиоэлектронное противодействие, а
управление самолетами групп различного тактического назначения осущест-
вляется с воздушного командного пункта, а также с самолета дальнего радио-
локационного обнаружения и управления авиацией.
Опыт ведения воздушных боев постоянно обобщался и анализировался.
На основе оценки обстановки и достигнутых результатов определились тен-
денции их развития, к наиболее устойчивым из которых относятся расшире-
ние пространственных границ, увеличение темпа и сокращение продолжи-
тельности боя, уменьшение количества участвующих в нем самолетов. Осо-
бенно характерной является тенденция повышения результативности, т. е.
снижение выживаемости истребителей.
Выживаемость - понятие оперативное, характеризующееся отношением
количества потерянных самолетов к числу боевых самолето-вылетов, произве-
денных истребителями за операцию (войну в целом). По итогам второй миро-
вой войны на один потерянный самолет приходилось около 100 самолето-
вылетов (коэффициент потерь 0,01). Такое же соотношение сохранилось и в
войне в Корее. Однако в операции "Лейнбакер-2", завершавшей длительную
воздушную войну во Вьетнаме, коэффициент потерь увеличился до 0,02, а в
ближневосточных конфликтах 70-80-х годов достиг сначала 0,03, а затем 0,04.
Воздушные противники, вступавшие в жестокий спор с помощью огня,
все реже возвращались на свои базы в полном составе. Нараставшие потери
приводили в конечном счете к более быстрому истощению сил и сокращению
продолжительности боевых действий. Так, в арабо-израильской войне на
Ближнем Востоке (октябрь 1973 г.) воевавшие стороны (ВВС Сирии и Израи-
244
ля) при среднем боевом напряжении два вылета в сутки и коэффициенте
потерь 0,03 на 24-е сутки прекратили противоборство, потеряв половину бое-
вого состава (в ходе войны каждая сторона пополнила его 80 самолетами).
В то время в воздухе примерно в равном количественном соотношении
"встречались" истребители 2-го поколения МиГ-21 и "Мираж", имевшие
близкие боевые возможности.
В ходе вооруженного вторжения Израиля на ливийскую территорию
(1982 г.) коэффициент потерь у сирийских ВВС достиг 0,04. Силы "растаяли"
быстро, в результате чего боевые действия продолжались всего неделю. На
стороне Израиля в бой вступили новые истребители завоевания превосходст-
ва в воздухе - F-15A "Игл" и F-16 "Файтинг Фолкон", действовавшие совме-
стно с самолетом дальнего радиолокационного обнаружения и управления
Е-2С "Хокай".
Анализ воздушных сражений в операции "Буря в пустыне", проведенный
западными экспертами, не выявил объективных показателей, по которым
можно было бы судить о коэффициенте потерь. Иракские истребители, усту-
павшие в численности, и их экипажи, еще не полностью освоившие новую
технику, не могли оказать серьезного сопротивления противнику.
В дальнейшем неоднократное воспроизведение боевых ситуаций на мо-
делирующих комплексах, а также экспертные оценки позволили определить
основные факторы, влиявшие на результаты воздушных противоборств. К их
числу отнесены:
• оружие (поражающие возможности авиационных комплексов);
• самолет;
• летчик (уровень подготовки летного состава);
• боевая задача;
• защита (оборонительные возможности комплексов);
• боевое управление.
Оружие. Эксперты установили, что падение выживаемости (увеличение
коэффициента потерь от 0,01 до 0,04) совпадает с появлением на истребите-
лях новых систем ракетного вооружения класса "воздух-воздух". В Корее
первые реактивные истребители F-86 "Сейбр" и МиГ -15 имели на борту толь-
ко пулеметы и пушки. Несмотря на возрастание скорости полета и увеличе-
ние практического потолка, воздушный бой остался ближним и не претерпел
значительных перемен по сравнению с периодом второй мировой войны. По-
разить самолет противника можно было только со стороны хвоста и на корот-
кой дистанции. Недостаток огня компенсировался количеством стволов и
скорострельностью. Самолеты сводились в крупные группы, образовывавшие
в воздухе массовые "карусели". Применить прицельно жестко закрепленное
по продольной оси самолета оружие малой дальности было сложно. "Ничей-
ные схватки" не были редкостью, а на одну результативную атаку приходи-
лось достаточно большое число самолето-вылетов (около 100).
В ходе октябрьской войны 1973 г. на Ближнем Востоке истребители про-
должали вести групповые ближние маневренные бои, однако применяли усо-
вершенствованное оружие (во Вьетнаме управляемые ракеты имели значи-
тельные ограничения по минимальной дальности пуска и по перегрузке). Это
позволяло пилоту свободнее маневрировать самолетом при подготовке и вы-
245
полнении атаки. В результате на 100 самолето-вылетов стало приходиться три
сбитых в воздушных боях истребителя. В начавшейся через девять лет ливан-
ской войне в борьбу вступили реактивные истребители 3-го поколения F-15 и
МиГ-23, оснащенные управляемыми ракетами средней дальности с полуак-
тивной радиолокационной системой наведения. Они не заменили, а лишь до-
полнили в боевом строю самолеты 2-го поколения (МиГ-21 и F-4 "Фантом").
Истребители "пенсионного возраста" продолжали вести ближний маневрен-
ный бой, а новые открыли дорогу всеракурсному бою, основой которого яв-
лялась встречная ракетная атака. На новое оружие пришлась треть общего
числа сбитых в той войне самолетов. Качественно изменившееся вооружение
способствовало повышению результативности воздушного боя.
Самолет. Слабости авиационной техники в локальных войнах проявля-
лись тогда, когда ее возможности не соответствовали условиям боевого при-
менения. Самолет МиГ-15 в Корее попал в свою стихию. Удачное сочетание
маневра и огня, надежности и неуязвимости предопределило успех в ближних
боях. Во Вьетнаме сверхзвуковой МиГ-21 выполнял свои прямые обязанно-
сти - перехват на скоростном догоне. Не подвели и качества "чистого" истре-
бителя в маневренных боях с самолетами "Мираж" на Ближнем Востоке
("Мираж" - легкий самолет одного с МиГ-21 поколения). Однако "время"
МиГ-21 закончилось в неравных спорах с F-15 (представителем нового поко-
ления), превосходившим его и в оружии, и в электронике, бывшего "моложе"
на двадцать лет. МиГ-23 создавался как маловысотный перехватчик, он нс
мог противопоставить свою логику боя облегченному и маневренному F-I6.
Выдающиеся качества МиГ-25 раскрывались на большой высоте (в страто-
сфере), куда противник не залетал. К групповым маневренным противоборст-
вам в диапазоне средних высот, развернувшимся в "ливанской" войне, он ока-
зался не готовым.
Летчик. Статистика воздушных войн утверждает, что половина из обще-
го числа потерь летного состава понесена в первых десяти вылетах. Только
затем летчик "врастает в обстановку", приобретает необходимую реакцию на
внезапно возникающие угрозы, начинает осмысленно разбираться в сложных
ситуациях боя. Кроме психологического фактора на причины потерь "моло-
дых" влиял отказ от общеизвестного лозунга "учить тому, что необходимо на
войне". В преддверии октябрьской войны 1973 г. было признано необходи-
мым обучить летчиков боевому маневрированию на критических режимах,
чему не уделялось внимания в мирное время. Перед конфликтом 1982 г. для
летчиков МиГ-23 была разработана программа ввода в бой, не имевшая у нас
аналогов. Остро ощущалось отсутствие тренажерных комплексов для отра-
ботки элементов парного и звеньевого боя. Возникла следующая ситуация:
самолет и оружие готовы к всеракурсному воздушному бою, а летчик - нет.
Трудно сказать, разрешилась ли эта ситуация к настоящему времени.
Боевая задача. Летчики большую часть ресурса затрачивают на выпол-
нение задачи, которая для краткости называется "прикрытие", и меньшую
на задачу сопровождения. Цель первой - не подпустить вооруженного про-
тивника к защищаемому объекту, а второй (эскортирования) - отразить напа-
дение на охраняемые бомбардировщики, военно-транспортные самолеты и
т. п. Анализ показывает, что боевая задача несет в себе большой потенциал
246
результативности (истребители прикрытия сбивают больше самолетов), а в
ходе решения задачи сопровождения эскорт попадает в сложную обстановку
повышенных угроз и, как правило, сам несет ощутимые потери.
Показательной является длительная воздушная война во Вьетнаме. Сцена-
рий боевых действий был довольно однообразен: в течение семи лет американ-
ская авиация наносила массированные удары по городам Ханой и Хайфон, а
северо-вьетнамские истребители совместно с наземной ПВО отражали налеты.
Американские бомбардировщики при полете к цели и обратно сопровождались
истребителями "Фантом", которые создавали вокруг них двойное кольцо, при
этом поддерживалось шестикратное численное преимущество нападающей
стороны. Самолеты, вступившие в бой, были сравнимы по поражающим воз-
можностям и аэродинамическим характеристикам, однако сражавшиеся в
меньшинстве "защитники вьетнамского неба", по признанию западных специа-
листов, бои не проигрывали и несли меньшие потери. По этому поводу в жур-
нале "Интеравиа" отмечалось, что ВВС США встретили мощное противодейст-
вие системы ПВО Северного Вьетнама. Эскадрильи истребителей ДРВ не при-
бегали к массированному отражению авиации противника, а периодически
вводили в бой свои силы, строго сообразуясь с обстановкой. Применение так-
тики подготовленных и внезапных атак в течение определенного времени стало
основным фактором, обеспечившим успех стороне, "выдержавшей оборону".
Летчики истребителей МиГ-21 использовали то обстоятельство, что тяжелые
самолеты "Фантом" были прикованы к бомбардировщикам, а это затрудняло
выполнение маневра. Атаки наносились с задних полусфер ракетами, запус-
каемыми на скорости, соответствующей числу М = 1,2. Такая тактика, осно-
ванная на приеме, требующем высокого мастерства, позволяла в максимальной
степени использовать фактор внезапности. Крейсерская скорость истребителей
F-4, прикрывающих ударные группы, достигала лишь 900 км/ч, поэтому, как
отмечают специалисты ВВС, короткие удары на догоне проводились против-
ником с наименьшим риском для собственного самолета.
Условия, в которых истребители выполняли задачу сопровождения, со
временем мало изменились. Как только предпринимались попытки усилить
охранение бомбардировщиков числом и качеством, сразу же начинались по-
иски новых приемов прорыва эскорта или связывания его боем (в интересах
образования коридора, свободного для пролета к тяжелым самолетам ударной
группы). По мнению экспертов, угроза со стороны перехватчиков еще более
возрастет по мере оснащения их управляемыми ракетами с активной систе-
мой наведения.
В будущих воздушных боях группы "глубокого вторжения" должны
предпринимать эффективные контрмеры, если хотят сохранить свою неуяз-
вимость на достигнутом на сегодняшний день уровне. Поиск таких контрмер
осуществляется путем моделирования.
Защита. Поражающие возможности реактивных истребителей 2-го и 3-
го поколений росли быстрее, чем их способности по защите. К авиационным
пушкам последовательно добавлялись управляемые ракеты малой, а затем и
средней дальности. Увеличение досягаемости и точности применения оружия
рассматривалось специалистами как главный фактор повышения результа-
тивности, чему способствовал также учет слабости индивидуальной и груп-
повой обороны. Атаковать в бою стало легче, чем защищаться. Угроза напа-
247
дения назревала далеко за пределами визуального обнаружения противника,
внезапный ракетный удар мог быть сорван только при налаженном дальнем
оповещении. Когда данные об угрозе атаки запаздывали, не спасал даже ма-
невр уклонения.
Усиление индивидуальной защиты истребителей за рубежом связывают с
обеспечением скрытности полета и устранением демаскирующих признаков.
"Самолеты-невидимки" F-l 17А, впервые участвовавшие в боевых действиях в
операции "Буря в пустыне", показали абсолютную выживаемость (в 1100 са-
молето-вылетах потерь не было). Однако западные эксперты подчеркивают,
что вступление их в бой даже не планировалось, так как они не обладали дос-
таточным боевым потенциалом; отсутствовали мощные радиолокационные
станции и ракеты средней дальности класса "воздух-воздух", т. е. получалась
"оборона без наступления", а это слишком дорогая затея ради радиолокаци-
онной неконтрастности. Возможная в реальных условиях встреча с современ-
ным "заметным" истребителем на дальности визуального контакта не остав-
ляла бы шанса на победу недостаточно маневренному F-l 17А.
Способ активной защиты, применявшийся в локальных войнах, не нашел
широкого распространения на практике из-за несовершенства бортовых обо-
ронительных средств. В журнале "Флюг ревю" сообщалось об испытаниях ла-
зерного излучателя, наводящего луч на выпущенную самолетом противника
"тепловую ракету". В 13 пробных пусках УР "Сайдуиндер" лазерный перехват
сработал (в пяти случаях ракеты были принудительно сведены с траектории
преследования). Однако информация о моменте пуска подавалась летчику са-
молета-цели руководителем эксперимента, поскольку кабинные устройства
пока не выдают сигналов оповещения (или команд на маневр уклонения).
В боевых условиях инфракрасные ловушки выстреливались летчиком из
встроенного контейнера после собственной оценки угрожаемой обстановки.
Не получил широкого распространения в локальных войнах и способ
нейтрализации- применение истребителями активных и пассивных помех
для усиления защиты в бою. Аппаратура радиоэлектронного противодействия
не прошла еще этап миниатюризации и размещалась во внешних подвесных
контейнерах, которые увеличивали лобовое сопротивление и снижали воз-
можность маневра. Размещенные в них радиолокационные ловушки при вы-
стреливании особого эффекта не давали; о случаях увода на них выпущенной
управляемой ракеты с радиолокационным наведением зарубежная печать не
сообщала.
Примеры неудачного применения истребителями средств пассивной ин-
дивидуальной защиты позволили зарубежным экспертам сделать вывод о сла-
бости обороны в современном бою. Они считают это следствием реализации
"материализованной" теории перехвата, ставившей во главу угла первую ре-
зультативную ракетную атаку, а к основному варианту уклонения от нее от-
носился скоростной отрыв, исключавший повторение ходов в бою. Еще во
время войны во Вьетнаме на практике были опровергнуты эти теоретические
заблуждения, но проблема эффективной защиты остается актуальной и сего-
дня, когда цена одной боевой потери значительно возросла. Все отмеченнйе
факторы, влияющие на результативность современного воздушного боя, на-
полняются в настоящее время новым содержанием.
248
Рис.2.6.1. Примерная схема комплексирования средств РЭБ на самолете 1980 г.:
1 — автомат для сбрасывания средств РЭБ одноразового действия;
2 — приемник предупреждения о радиолокационном облучении;
3 — радиочастотный передатчик помех; 4 - индикатор
Рис.2.6.2. Предполагаемая схема комплексирования средств РЭБ на самолете 2000 г.:
1 — автомат для сбрасывания средств РЭБ одноразового применения; 2 - система преду-
преждения о ракетной атаке; 3 — процессор для обработки данных различных бортовых
датчиков; 4 — приемник предупреждения о радиолокационном облучении; 5 - РЛС управ-
ления оружием; 6 — система миллиметрового диапазона длин волн; 7 — радиочастотный
передатчик помех; 8 — оптико-электронный передатчик помех; 9 — многофункциональный
индикатор; 10 — система предупреждения о лазерном облучении;
11 — соедства РЭБ однопазового ппименения (ложные цели)
249
Основные направления разработки средств радиоэлектронной борьбы и
способы их применения на период до 2000 г. определены предшествующим
опытом (рис. 2.6.1) и достижениями в области микроэлектроники (рис. 2.6.2).
Появление самолетов, выполненных по технологии "Стеле", перспективного
бортового радиоэлектронного оборудования и усовершенствованных систем
оружия обусловило разработку новых концепций защиты в ходе воздушного боя.
Как показал опыт воздушных боев, важнейшей предпосылкой сохранения
выживаемости является предупреждение об опасности, а наиболее целесооб-
разной реакцией на нее - маневр уклонения, сопровождающийся постановкой
маскирующей или "уводящей" помехи. В настоящее время боевое авиацион-
ное командование ВВС США проводит оценку системы, сигнализирующей о
приближении ракет класса "воздух-воздух" и "земля-воздух", которая ранее
была разработана для стратегической и армейской авиации. Получив опове-
щение об угрозе, система приводит в действие аппаратуру управления лож-
ными целями (ловушками).
Разработчики комплексной системы защиты считают, что она должна ис-
пользоваться целенаправленно и экономно. Так, при возможных сбоях в опо-
вещении и переходе на ручной режим ограниченное количество средств ра-
диоэлектронного противодействия одноразового применения может быть из-
расходовано преждевременно, после чего самолет остается без защиты.
Именно поэтому большое значение придается созданию эффективной систе-
мы предупреждения об атаках противника. Она должна обладать приемлемой
для боя чувствительностью и дальностью действия. Однако пассивное обна-
ружение цели, обеспечиваемое инфракрасными и ультрафиолетовыми датчи-
ками, имеет ограниченный радиус действия, особенно в неблагоприятных ме-
теоусловиях. Кроме того, модельные эксперименты показали высокую веро-
ятность ложных тревог вследствие приема сигналов от источников теплового
излучения, ошибочно принимаемых за факел двигателя ракеты противника.
В США ведутся работы по совершенствованию систем постановки помех
инфракрасных датчиков на базе твердотельной технологии. Продолжаются
также исследования по совершенствованию ложных тепловых целей и улуч-
шение специальных металлизированных аэрозолей для уменьшения демаски-
рующих признаков.
Боевое управление. Под этим термином подразумевается руководство ис-
требителями (перехватчиками), выполняющими боевое задание. Управленче-
скими функциями наделены наземный или воздушный командные пункты, а
также командиры групп в воздухе. Они принимают сведения о воздушной об-
становке, обрабатывают и анализируют их, а затем принимают решение на при-
менение наличных сил. Опыт локальных войн показал, что результативность воз-
душных боев прямо зависела от "качества" принимаемых решений.
В ливанской войне 1982 г., где впервые в бой вступили реактивные ис-
требители 3-го поколения и реальностью стала ракетная атака на встречном
курсе, сирийские ВВС понесли тяжелые потери: за шесть дней было сбито
около 60 самолетов (включая истребители-бомбардировщики МиГ-23БН и
Су-22). Уже упоминалось о качественном превосходстве F-15 над МиГ-21 и
МиГ-23МФ, однако основной причиной потерь участники событий считают
информационную недостаточность.
250
Преобразование осведомительной информации в управляющую - основная
функция боевого управления. Возросший темп современного боя обусловил
тенденцию сокращения цикла управления. Однако ситуация с истребителями
российского производства - участниками локальных войн - складывалась так,
что ими руководили с помощью устаревших средств оповещения, контроля и
наведения. В ливанской войне противник располагал комплексами воздушных
командных пунктов ДРЛО "Хокай" Е-2С, а МиГ-23 и МиГ-25 взаимодейство-
вали только с наземными КП, не охватывавшими радиолокационным полем
район ведения боев (на "рабочих" высотах). В итоге информация была запозда-
лой, неполной или отсутствовала совсем. Не отслеживая противника, не имея
данных в реальном времени о его состоянии, боевой расчет КП или командир
группы переходили в "режим неопределенности". Принимаемые решения шли
вразрез с обстановкой и приводили в итоге к боевым потерям. При неполной
информации в современном бою заметно снижалась роль факторов "оружие",
"самолет" и "летчик". Истребитель, оснащенный ракетами средней дальности,
самостоятельный радиолокационный поиск не вел, а действовал в связке с воз-
душным КП, снабжавшим его сведениями о противнике с дальних рубежей и
целеуказанием. В локальных войнах образовался на основе боевого опыта ком-
плекс воздушного боя, составными и взаимодействующими элементами кото-
рого являлись воздушный КП, специализированный самолет радиоэлектронной
борьбы и истребитель с управляемым оружием средней дальности. Совершен-
ствование этих элементов должно происходить синхронно.
Список литературы к разделу 2
2.1. Развитие авиационной науки в СССР. Историко-технические очерки, - М.: Наука, 1980.
2.2. Авиастроение России / Под ред. А. Г. Братухина. - М.: Машиностроение, 1995.
2.3. Мубаракшин Р. В., Балуев В. М„ Воронов Б. В. Прицельные системы стрельбы. М.: ВВИА
им. Н.Е.Жуковского, 1973.
2.4. Государственный научно-исследовательский институт авиационных систем (1946-1996).
Очерки истории / Под ред. акад. Е.А.Федосова. - М.: НИЦ ГосНИИАС, 1996.
2.5. Авиация. Энциклопедия. - М.: Изд-во БРЭ, ЦАГИ, 1994.
2.6. Проектирование систем наведения / Под ред. Е.А. Федосова. - М.: Машиностроение, 1975.
2.7. Казаков И. Е., Доступов Б. Г. Статистическая динамика нелинейных автоматических сис-
тем. - М.: ГИФМЛ, 1962.
2.8. Чернецкий В. И. Анализ точности нелинейных систем управления,- М.: Машиностроение,
1968.
2.9. Пугачев В.Н. Комбинированные методы определения вероятностных характеристик.- М.:
Сов. радио, 1963.
2.10. Левитин В. Ф. Сквозное моделирование - метод исследования многоэтапных динамических
процессов. - Труды ГосНИИАС. Сер. Вопросы авионики, 1995, № 1.
2.11. Вентцель Е. С. Теория вероятностей. - М.: ГИФМЛ, 1958.
2.12. Ван-Дер-Варден Б. Л. Математическая статистика. - М.: ИЛ, 1960.
2.13. Зуенко Ю„ Коростылев С. Боевые самолеты России: Справочник. - М., 1994.
2.14. Ильин В., Левин М. Современная авиация. Истребители. - М.: Изд-во "Виктория". ACT,
1997.
2.15. Современная военная авиатехника. Иллюстрированная энциклопедия / Сост. В. Н. Шун-
ков. - Минск: Изд-во Харвест, 1997.
2.16. Современные боевые самолеты. Справочное пособие / Сост. Н.И. Рябинин. Минск: Изд-во
"Элайда", 1997.
2.17. Энциклопедия современного оружия и боевой техники. Т.1.- М.: Изд-во "Полигон". ACT,
1997.
251
2.18. Российское оружие: война и мир. -М.: Изд-во ФДВ, 1996.
2.19. Антонов В. И., Кнышев А. И., Симонов М. П. Основные требования к истребителю 4-го по-
коления и их реализация в конструкции истребителя-перехватчика Су-27.- Техника воздушного
флота. ЦАГИ. 1990. № 2.
2.20. Авиационная техника на международных авиасалонах 1992-1997 гг. (аналитический обзор)
/ Под общ. ред. Е. А.Федосова. М.: НИЦ ГосНИИАС, 1993-1998.
2.21. Третий международный авиационно-космический салон в России ("МАКС-97"): Отчет.
ГосНИЦ ЦАГИ, 1997.
2.22. Морская авиация России / Под ред. Л.Г. Братухина. - М.: Машиностроение, 1996.
2.23. Российское ракетное оружие 1943-1993. Справочник / Сост. А. В. Карпенко - СПб.: ТОО
"ПИКА", 1993.
2.24. Бабич В.К. Истребители меняют тактику. - М.: Воениздат, 1983.
2.25. Бабич В.К. Авиация в локальных войнах. - М.: Воениздат, 1988.
2.26. Бабич В. К. Цикл статей о современном воздушном бое. - Зарубежное военное обозрение,
1996, №7, 8; 1997, №9, 10.
раздел
1
Авиационные
КОМПЛЕКСЫ ПЕРЕХВАТА
МиГ-31 и Су-27:
НАУЧНО-ТЕХНИЧЕСКИЕ
ДОСТИЖЕНИЯ
Показано современное состояние авиации ПВО России. Представлены
авиационные комплексы перехвата МиГ-31, Су-27 и реализация на борту ка-
ждого из них научно-технических достижений. Описаны способы выхода в
боевое соприкосновение и групповые действия, автоматизированное команд-
ное наведение в наземных АСУ “Воздух-1М” и “Луч”, ракетное вооружение
(управляемые ракеты большой и средней дальности Р-33, Р-27 и РВВ-АЕ) и
его применение на истребителе, бортовые радиолокационные станции, сис-
темы управления вооружением (СУВ “Заслон” и СУВ С-27), системы авто-
матического управления (САУ-155МПи САУ-10).
3.1. Решаемые задачи, тактико-технические
характеристики и боевое применение
истребителей МиГ-31 и Су-27
3.1.1. Условия боевых действий и новые
возможности перехватчика МиГ-31
Самолет МиГ-31 (рис. 3.1.1) является специализированным перехватчи-
ком 4-го поколения разработки АНПК "МиГ". Он предназначен для использо-
вания в системе ПВО страны, способен выполнять длительное патрулирова-
ние и вести борьбу с аэродинамическими воздушными целями всех типов, в
том числе с малоразмерными крылатыми ракетами, вертолетами и высотными
скоростными самолетами-разведчиками. Условия боевых действий МиГ-31:
любое время суток, сложные метеорологические условия, помеховая обста-
новка и интенсивное радиоэлектронное противодействие.
Самолет может использоваться в автономных и полуавтономных дейст-
виях, а также в составе группы из однотипных самолетов и в качестве коман-
дира в смешанной группе при управлении действиями истребителей МиГ-23,
МиГ-29, Су-27.
Истребитель МиГ-31 разрабатывался как всевысотный перехватчик,
предназначенный для противодействия стратегическим разведчикам SR-71
"Блэкберд", стратегическим бомбардировщикам В-1 "Лансер" и крылатым ра-
Рис. 3.1.1. Перехватчик МиГ-31
255
кетам большого радиуса действия. Базой для создания самолета послужил хо-
рошо зарекомендовавший себя перехватчик МиГ-25 (проект под названием
Е-155МП был начат в 1972 г.). Вместе с тем самолет МиГ-31 имеет целый ряд
принципиально новых возможностей и бортовых систем.
Он оснащен импульсно-доплеровской РЛС с фазированной антенной ре-
шеткой в составе СУВ "Заслон". МиГ-31 является первым в мире серийным
истребителем с ФАР, имеющей электронное сканирование. Максимальная
дальность обнаружения цели с эффективной поверхностью рассеяния (ЭПР)
о„ = 16 м2 составляет 200 км, дальность сопровождения цели типа самолет
ДРЛО - 120 км, типа истребитель - 90 км в передней полусфере и, соответст-
венно, 120 и 70 км в задней полусфере. РЛС позволяет одновременно сопро-
вождать до 10 целей и атаковать четыре цели. Зона обзора, одновременного
сопровождения и обстрела целей равна + 70° по горизонтали и +70...-60° по
вертикали [3.1].
Истребитель МиГ-31 оснащен теплопеленгатором 8ТК на выдвижной ус-
тановке, позволяющим скрытно осуществлять поиск и применять оружие, а
также действовать в условиях интенсивных радиоэлектронных помех.
Наибольшая боевая эффективность достигается реализацией групповых
действий самолетов МиГ-31, связанных между собой информационным взаи-
модействием с автоматическим обменом информацией. Цифровая система за-
крытой связи АПД-518 обеспечивает обмен радиолокационной информацией
между самолетами. Такой вариант применения позволяет группе из четырех
самолетов МиГ-31 контролировать воздушное пространство протяженностью
по фронту 800...900 км. Возможность ведения информационного обмена по-
зволяет применять МиГ-31 для дальнего радиолокационного обнаружения и
наведения на цель самолетов типа Су-27, МиГ-29.
Сложное радиотехническое оборудование потребовало ввести в экипаж
штурмана-оператора, главными задачами которого являются контроль за воз-
душным пространством, управление системами СУВ, выбор тактики перехва-
та одиночных и групповых целей.
Укажем некоторые примеры действий и условий перехвата целей истре-
бителями МиГ-31.
1) Перехват маловысотной цели типа F-16, летящей на высоте
Нц= 0,5... 1,5 км со скоростью Уц = 700...800 км/ч (цель может маневрировать
по курсу с выходом на "слепые" ракурсы), реализуется с применением ракет
Р-33 и Р-60 в одной атаке при выходе в боевое соприкосновение в режиме ко-
мандного наведения при радиолокационном ведущем канале с измерением
дальности от БРЛС.
2) Перехват с задней полусферы скоростной цели типа F-14, летящей на
высоте 16... 18 км со скоростью 2000 км/ч, реализуется с применением ракет
Р-40ТД в режиме командного наведения от наземной АСУ при ведущем теп-
ловом канале с определением дальности по целеуказанию АСУ.
3) Перехват постановщика активных помех типа В-1 А, летящего на высо-
те Нц = 3 км со скоростью Уц = 600 км/ч, выполняется одиночным самолетом
или парой в режиме бортового поиска по разовой информации от наземной
АСУ при определении дальности методами триангуляции (при действиях.па-
рой), кинематическим методом и по целеуказанию АСУ.
4) Перехват в передней полусфере группы целей из 10 самолетов В-1А
(Нц = 3,5...4,5 км, Уц= 800 км/ч) осуществляется звеном взаимодействующих
256
перехватчиков (или двумя парами) в режиме бортового поиска по разовой
информации о головной цели от АСУ при ведущем радиолокационном канале
с измерением дальности БРЛС с применением ракет Р-33.
5) Перехват маловысотных целей типа F-lll, F-15, ALCM (Нц= 1...2 км,
V„= 750...900 км/ч) выполняется в разрывном поле АСУ при командном на-
ведении и бортовом поиске или по регулярной информации от АСУ в режиме
бортового наведения с передней и задней полусфер для ведущего канала РЛС.
При анализе боевых возможностей перехватчика МиГ-31 необходимо под-
черкнуть основные его преимущества и новые научно-технические разработки,
свойственные всему комплексу и его бортовым системам:
• Впервые реализован принцип полуавтономных действий при наличии
прерывистой или разовой информации о цели, что позволяет применять
комплекс в районах, где отсутствует сплошное радиолокационное поле
информации.
• Впервые реализован принцип групповых действий, обеспечиваемый автома-
тическим обменом информацией между перехватчиками с помощью АПД-
518, что позволяет производить построение боевых порядков группы с борта
ведущего, распределять цели между перехватчиками группы.
• Реализована возможность борьбы с авиацией противника в массированных
налетах, в том числе с самолетами, летящими на малых высотах, при атаке в
переднюю и заднюю полусферы за счет возможностей БРЛС "Заслон" по од-
новременному сопровождению 10 целей, пуску ракет по четырем целям в
одной атаке и целераспределению между перехватчиками.
• Большие зоны обзора БРЛС, дальность обнаружения и захвата целей в ППС
обеспечили автономные действия перехватчика при отсутствии радиолока-
ционного поля информации.
• Реализованы новые способы борьбы с целями, оказывающими помеховое
противодействие, с использованием триангуляционного и кинематиче-
ского методов восстановления информации по данным наземных АСУ и
борта другого самолета.
• Установка на самолете двух двигателей Д-30Ф6 позволила обеспечить
сверхзвуковой рубеж перехвата по запасу топлива 720 км при полной за-
правке (без подвесных баков) при атаке высотной цели в ППС с посадкой
на аэродроме вылета.
• Реализация на борту цифроаналоговой системы автоматического управ-
ления САУ-155МП с цифровым вычислителем ЦВТУ обеспечила выпол-
нение логики взаимодействия перехватчика с наземной АСУ при команд-
ном наведении и управление самолетом в продольном и боковом каналах
в автоматическом и директорном режимах.
Транспортные возможности самолета МиГ-31 были подтверждены про-
веденным в 1987 году перелетом по маршруту Мурманск - Северный полюс -
Анадырь (Чукотка). Весь полет проходил в автоматическом режиме (за ис-
ключением дозаправки). Полет сыграл значительную роль в отработке и всего
боевого комплекса, и навигации, и системы управления, и системы заправки в
воздухе в сложнейших условиях Севера. МиГ-31 оказался первым истребите-
лем, побывавшим над Северным полюсом.
Хотя самолеты МиГ-31 не применялись в реальных боевых действиях
против воздушных целей, само появление этих истребителей в частях ПВО
257
17 - 4094
привело к заметному изменению и воздушной обстановки, и тактики поведе-
ния иностранной авиации. Так, в начале 80-х годов значительно сократились
полеты американских самолетов над нашими кораблями в северной части Ат-
лантики и Баренцева моря после появления там МиГ-31. После того как в
1985 г. на Дальний Восток была направлена эскадрилья самолетов МиГ-31,
резко уменьшилась активность американской авиации в регионе [3.1]. Кос-
венным следствием создания самолета МиГ-31 можно считать приостановку
использования американских высотных стратегических разведчиков SR-71,
поскольку они могли быть уничтожены авиационным комплексом МиГ-31.
Характеристика способов боевого применения
Боевое применение перехватчика МиГ-31 включает выполнение несколь-
ких этапов полета, в том числе:
• выход в боевое соприкосновение с целями;
• самонаведение на воздушную цель (цели) с пуском ракет;
• выход из атаки.
Отметим некоторые особенности реализации этих этапов.
Выход в боевое соприкосновение с целями выполняется способами ко-
мандного наведения, бортового наведения и бортового поиска.
Командное наведение применяется во всех случаях, когда пункт наведе-
ния располагает регулярной информацией о целях и перехватчике или осуще-
ствляет наведение на экстраполированную, а также имитируемую цель.
Бортовое наведение применяется:
• при наличии на пункте наведения регулярной координатной информации
о цели и отсутствии такой информации о перехватчике, с которым имеет
связь;
• при сбоях команд наведения и неустойчивом решении задачи наведения,
что определяется штурманом пункта наведения в случае отклонения фак-
тических параметров полета перехватчика от заданных и нестабильности
расчетного рубежа перехвата по дальности и направлению;
• в дополнение к командному наведению при большой загрузке штурмана
пункта наведения в процессе отражения массированного налета средств
воздушного нападения.
Бортовой поиск применяется при наличии на пункте наведения инфор-
мации, по которой нельзя реализовать командное и бортовое наведение, - ра-
зовой, прерывистой, априорной. Режим бортового поиска формируется также
на борту в условиях:
• продолжительного отсутствия информации целеуказания при командном
или бортовом наведении;
• прекращения информации о цели от БРЛС и АПД.
Атака воздушной цели выполняется при автоматизированном расчете
траектории самонаведения по методу "кривая атаки", а также при задании
штурманом-оператором высоты и ракурса подхода к цели. В процессе сбли-
жения с целью перехватчик выходит в условия применения оружия, индици-
руемые ему в виде максимальной и минимальной дальностей пуска ракет.
258
Выбором направления атаки в вертикальной и горизонтальной плоскостях
достигаются эффективное огневое воздействие по пели и меньшие потери пе-
рехватчиков. Наилучшие высоты и ракурсы на дальностях D > DPmax зависят
от типа атакуемой цели и вида ее противодействия.
Выход из атаки после окончания радиолокационного подсвета атакуемой
цели в зависимости от тактической ситуации реализуется следующими спосо-
бами окончания атаки и выхода из нее:
• разворот на встречный курс относительно полета цели - применяется по-
сле атаки цели, замыкающей колонну или расположенной в средней части
группы целей, рассредоточенной по фронту;
• разворот от группы целей на встречно-пересекающийся курс относитель-
но направления полета цели - применяется после атак фланговых целей
рассредоточенной по фронту группы;
• отворот и последующий полет от цели с разгоном по скорости - выпол-
няется после встречного ракетного боя, а также атаки с задней полусферы
целей, способных оказывать огневое противодействие;
• отворот от цели для решения перехватчиком последующих задач (сбор
группы, перенацеливание и др.) - применяется после атак целей, не ока-
зывающих огневого противодействия.
Сравнительный анализ маневренных и боевых возможностей
истребителей МиГ-31 и F-14A "Томкэт"
По своим функциям, решаемым задачам и многим характеристикам само-
леты МиГ-31 и F-14 близки и уникальны. Оба они являются двухместными
сверхзвуковыми дальними перехватчиками, осуществляют продолжительное
патрулирование, ведут перехват воздушных целей на больших удалениях (ру-
бежах). Самолеты МиГ-31 и F-14 — единственные в мире боевые истребители,
оснащенные управляемыми ракетами класса "воздух-воздух" большой даль-
ности (Р-33 и AIM-54). На борту этих самолетов размещена высокоэффектив-
ная аппаратура обеспечения боевых действий, в первую очередь системы
управления вооружением ("Заслон" и AWG-9). Самолеты МиГ-31 и F-14 вы-
пускались серийно в достаточно большом количестве и состоят на вооруже-
нии ряда стран (для 1998 года - см. табл. 3.1.1). По данным ежегодника "The
Military Balance" (см. НВО, 2000, № 2) в 1999—2000 гг. в составе авиации ПВО
России насчитывается 280 перехватчиков МиГ-31.
Таблица 3.1.1
Количественный состав перехватчиков МиГ-31 и F-14,
состоящих на вооружении
Самолет Страна Количество
МиГ-31 Россия 425
Казахстан 32
F-14A "Томкэт" США Иран 255
25
259
17'
Представляя собой в определенной мере альтернативные разработки, ре-
шающие близкие задачи, авиационные комплексы МиГ-31 и F-14 являются
результатом научно-технического и технологического прогресса 60-70-х го-
дов. Многие из достижений со-
хранили высокий уровень до на-
стоящего времени. Дадим сравни-
тельную оценку некоторых из
возможностей этих комплексов
по выполнению ими своих функ-
ций и задач воздушной обороны.
Маневренные возможности
самолетов. Анализ летно-техни-
ческих и маневренных характе-
ристик истребителей-перехватчи-
ков МиГ-31 с четырьмя ракетами
Р-33 и F-14A с шестью ракетами
AIM-54A "Феникс" показал сле-
МиГ-31 дующее (табл. 3.1.2).
Таблица 3.1.2
, Сравнительные оценки маневренных возможностей истребителей МнГ-31 и F-14A
Характеристика М=1,4 М=2,2
Н=5 км Н=10 км Н=17 км
МиГ-31 F-14 МиГ-31 F-14 МиГ-31 F-14
Тяговооруженность Рпф / Gpac4 1,08 1,05 0,67 0,7 0.43 0.41
Перегрузка установившегося ви- ража Пууст 4,5 1,7 2,9 2,2 1,6 1,27
Максимальная перегрузка ПУтах 4,5 7.5 4,5 7,5 3,27 3,47
Скорость установившегося раз- ворота, град/с 5,6 2,4 3,7 2,7 1,1 0,68
Максимальная скорость разворо- та, град/с 5,6 9,3 5,9 9,9 2,7 2,9
Радиус установившегося разворо- та, км 4,7 14,9 6,6 9,1 34,4 54,8
Удельная избыточная мощность V’y, м/с 173 34 122 71 86 29
Максимальный угол набора высоты при М = const, град для у = 0 23 53 17 10,2 7,6 2,6
для у = 45° 21,7 4 15 7,6 3 0
• Максимальные высоты горизонтального полета (практические потолки) у
перехватчика МиГ-31 на 1,5. ..2,5 км больше, чем у самолета F-14A.
• Максимальное число М полета самолета МиГ-31 превосходит этот пара-
метр самолета F-14 на высотах Н>13 км; при полете на высоте Н=17 км
260
разница в скоростях составляет AV=670 км/ч. На высотах полета от 5 до 13
км истребитель МиГ-31 уступает самолету F-14 в скорости; для получения
превосходства по этому параметру ему необходимо иметь превышение в
3...4 км.
• Располагаемые перегрузки и максимальные угловые скорости неустано-
вившегося разворота у МиГ-31 меньше, чем у самолета F-14 практически
во всем диапазоне высот и скоростей.
• Маневренные характеристики установившихся виражей и наборов высо-
ты на полном форсаже на сверхзвуковых режимах у самолета МиГ-31
существенно выше, чем у F -14; на дозвуковых скоростях эти характери-
стики равны. Скорости установившегося разворота самолета МиГ-31 при
М>1...1,2 на Н = 5... 10 км выше, чем у F-14, в 1,5...2 раза. Для получения
преимущества над F-14 в горизонтальных и вертикальных маневрах са-
молет должен предварительно выйти на сверхзвуковые скорости.
• В пространственных маневрах, сопровождающихся ростом высоты при
выдерживании постоянной скорости, перехватчик МиГ-31 превосходит
самолет F-14 по максимально допустимым углам крена, углу наклона
траектории, а также по располагаемым величинам установившейся скоро-
сти разворота и энергетической скороподъемности.
• Анализ энергетических характеристик, затрат времени и пути для дости-
жения конечных условий при наборе высоты и разгоне показывает, что
МиГ-31 превосходит F-14, но уступает ему по расходу топлива.
• Сравнение самолетов с точки зрения их эффективности как транспортных
средств по доставке оружия в район цели путем оценки рубежно-времен-
ных характеристик выявило преимущество самолета МиГ-31 перед F-14.
Предельный рубеж перехвата при выходе в одинаковые условия у само-
лета МиГ-31 в 2...2,5 раза больше. Истребитель МиГ-31 достигает задан-
ных рубежей перехвата за более короткое время, чем F-14, причем выиг-
рыш во времени растет с увеличением радиуса R полета. Так, при
R = 300, 500, 700 км выигрыш во времени составляет At = 1,1; 3,0; 26,2
мин соответственно.
Системы управления вооружением "Заслон" и AWG-9. Бортовая РЛС
"Заслон" несколько уступает станции AWG-9 по энергетическим характери-
стикам, канальности и массе. Наиболее существенное качественное различие
между этими двумя радиолокационными станциями состоит в использовании
антенн с разными типами сканирования. Примененная в РЛС AWG-9 антенна
с механическим сканированием позволяет либо производить обзор простран-
ства по жесткой программе с сопровождением целей "на проходе", либо осу-
ществлять непрерывное сопровождение одной цели. Фазированная антенная
решетка с электронным сканированием в БРЛС "Заслон" обеспечивает воз-
можность практически безынерционного перемещения луча в любую задан-
ную точку.
Различие в типах антенн оказало влияние на общую концепцию построе-
ния СУВ AWG-9 и "Заслон". Так, в системе AWG-9 для одновременной атаки
нескольких целей применяются ракеты с полуактивно-активной ГСН,
поскольку антенна с механическим сканированием не может обеспечить од-
новременный подсвет нескольких целей с характеристиками, достаточными
для наведения ракеты на последнем этапе. Напротив, в системе "Заслон" при
261
атаке группы целей наведение ракет производится только в полуактивном
режиме. Необходимое время подсвета обеспечивается антенной с электрон-
F-14
ным сканированием.
Хотя БРЛС "Заслон" и усту-
пает AWG-9 в потенциальной
дальности обнаружения, нали-
чие электронного сканирования
позволяет компенсировать ука-
занный разрыв в дальностях при
захвате и сопровождении целей.
Фактически слежение за траек-
торией цели и готовность к при-
менению оружия в обоих систе-
мах начинается на одинаковых
дальностях.
В связи с различными типами сканирования в БРЛС "Заслон" и AWG-9
реализованы разные методы обработки информации при обнаружении цели и
измерении ее дальности и угловых координат. При этом точности определе-
ния дальности и угловых параметров у БРЛС "Заслон" существенно (в не-
сколько раз) выше, чем у AWG-9.
Оптико-электронные системы (тепловые каналы 8ТК и JR), входящие в
Б-14состав СУВ самолетов МиГ-31 и F-14, имеют ряд одинаковых режимов
работы: автономный, совместной работы с РЛС, обзора пространства (поис-
ка), сопровождения одиночной цели, встроенного контроля. В обеих системах
отсутствует сопровождение нескольких целей. Тепловой канал JR системы
AWG-9 обеспечивает автоматическое определение числа целей в пределах
разрешения РЛС (система 8ТК позволяет это делать только визуально).
Решение боевых задач комплексом А производится БЦВС системы AWG-
9 с помощью специализированных аналоговых вычислителей, центральной
БЦВМ CDC-5400B, блока интерфейсов. БЦВС системы "Заслон" включает
центральную БЦВМ "Аргон-15" с устройством ввода-вывода и специализиро-
ванные цифроаналоговые устройства для первичной обработки информации
БРЛС и 8ТК. Таким образом, системы имеют черты иерархической структуры
и построены по одному принципу.
Сравнение БЦВМ CDC-5400B системы AWG-9 и БЦВМ "Аргон-15" СУВ
"Заслон" показывает, что по вычислительным характеристикам, таким, как
эффективное быстродействие, разрядность, объем запоминающих устройств,
БЦВМ CDC-5400B превосходит БЦВМ "Аргон-15".
В целом бортовые СУВ самолетов МиГ-31 и F-14A имеют близкие харак-
теристики. По элементам и подсистемам наибольшее отставание СУВ самоле-
та МиГ-31 связано, в первую очередь, с массовыми характеристиками, а так-
же с характеристиками центральной БЦВМ и оптической информационной
системы. Отставание по потенциальным характеристикам БРЛС во многом
компенсируется возможностями ФАР и соответствующей обработкой сигна-
лов в одноцелевом режиме; в многоцелевом режиме БРЛС самолета МиГ-31
имеет лучшие характеристики.
Боевые возможности и эффективность авиационных комплексов
МиГ-31 и F-14. Авиационные ракетные комплексы МиГ-31 и F-14 предна-
262
значены для решения широкого круга боевых задач по перехвату и уничтоже-
нию воздушных целей противника. Основными задачами являются:
• перехват воздушных целей в большом диапазоне высот и скоростей их по-
лета, применяющих маневренное и радиолокационное противодействие;
• уничтожение истребителей противника в дальнем ракетном бою.
Одной из основных характеристик АКП является зона возможного пере-
хвата (см. п. 2.1.3), отображающая возможности комплекса по перехвату воз-
душных целей на средних рубежах с заданной вероятностью. Комплекс
МиГ-31 имеет лучшие показатели по скоростям перехватываемых целей, осо-
бенно в ЗПС, за счет более высоких скоростей истребителя. В то же время са-
молет F-14 имеет преимущество по высотам перехватываемых целей за счет
лучших перегрузочных характеристик ракеты AIM-54A "Феникс".
Характеристики и данные перехватчиков МнГ31 F14A
Двигатель Д30Ф6 TF30-P-412A
Тяга форсажная / бесфорсажная , кгс 15500/9500 9480 / 5600
Запас топлива во внутренних баках, кг 15500 7460
Максимальная взлетная масса, т 41...43 31...33
Тяговооруженность взлетная 0,76 0,72
Максимальная скорость на высоте / у земли, км/ч 3000/1450 2350/ 1450
Минимальная скорость, км/ч 450 400
Практический потолок, км 20,6 5 18,5 7,5
Максимальная перегрузка Рубежи перехвата без ПТБ, км:
форсажный 720 (М=2,35) 25О(М=1,5)
бесфорсажный 1250 (М=0,8) РП-31 "Заслон" 800 (М=0,8) AN/AWG-9
Система управления вооружением
антенна РЛС Углы отклонения РЛС, град: ФАР ЩАР
по азимуту +70...-70 +65...-65
по углу места +70...-60 *60. .. 60
число сопровождаемых целей 10 24
число одновременно обстреливаемых целей 4 6
зона многоцелевого сопровождения, кв. град 18200 420
дальности обнаружения (ст, =3м2) в ППС / ЗПС, км... Индикация СУВ: . 120...130/45...60 130... 140760
у летчика ППИ-70В, ИЛС + 2 индика-
ИТО-Л тора обстановки
у штурмана-оператора ИТО, обзорный 2 индикатора
индикатор на ЭЛТ
БЦВМ "Аргон-15" CDC-5400B
Оптико-электронная система 8ТК JR
Система (блок) управления оружием Комплекс обороны: СУ 0-31 AN/ ASN-92
станция предупреждения о РЛ-облучении "Береза МЛ" AN/ALR-45
устройство разбрасывания пассивных помех АПП-50 AN/ALE-39
система шумовых помех — AN/ALQ-126
Радиолиния передачи данных Вооружение: АПД-518, КРУ ASW-27
управляемые ракеты большой дальности 4 х Р-33 6 х AIM-54A
управляемые ракеты средней дальности 2 х Р-40ТД 6 х AIM-7F/E
управляемые ракеты малой дальности 4 х Р-60М 2 х А1М-9
пушки (тип / калибр / число снарядов) ГШ-23-6/23/260 Мб 1 А-1/20/675
бомбы — 14 х Мк84
По данным ряда источников дальноспьобнаружения целей БРЛС AWG-9 - до 240 км.
263
Анализ возможностей комплексов во встречном ракетном бою показыва-
ет, что истребитель F-14 с ракетой "Феникс" при полете на больших высотах
или на близкой к самолету МиГ-31 высоте имеет преимущество, что объясня-
ется более высокими характеристиками ракеты. При выводе перехватчика
МиГ-31 с достаточными превышениями относительно F-14 и выдерживании
необходимой величины пеленга в момент пуска (например, при тактическом
отвороте) обеспечиваются равные условия борьбы.
Комплексной характеристикой эффективности можно считать показатель
боевого потенциала, под которым понимают соотношение численности груп-
пировок, выполняющих заданный объем боевых задач, при потерях не более
заданного уровня (или соотношение количества пораженных целей к потерям
за время операции между двумя типами самолетов). В соответствии с оценка-
ми 2-го ЦНИИ МО соотношение коэффициентов боевого потенциала ком-
плексов МиГ-31 nF -14Асоставляет 1 к0,6...0,7.
3.1.2. Назначение, задачи и общие боевые характеристики
истребителя Су-27
Одноместный двухдвигательный самолет Су-27 (рис.3.1.2) относится к
истребителям 4-го поколения и, по общему признанию, является одним из
лучших боевых самолетов мира конца 80-х годов [3.1]. Он создавался для за-
воевания и удержания господства в воздухе со способностью вести как даль-
ний ракетный перехват воздушных целей, так и высокоманевренный ближний
воздушный бой. Су-27 явился ответом нашей страны на создание в США ис-
требителя завоевания превосходства в воздухе F-15 "Игл" и в дальнейшем
значительно превзошел его по боевым характеристикам и возможностям.
Самолет Су-27 отличается рядом совершенных характеристик и новым
бортовым оборудованием, из которых можно отметить:
• принципиально новую аэродинамическую компоновку, обеспечившую
сверхвысокие маневренные характеристики самолета;
• высокую тяговооруженность, создаваемую двухконтурными турбореак-
тивными двигателями;
• большой запас топлива, позволяющий с учетом экономичности силовой
установки обеспечить высокие рубежные показатели комплекса;
• широкий диапазон эксплуатационных высот и скоростей полета, который
дает возможность перехватывать сверхзвуковые высоколетящие цели в
передней и задней полусферах;
• современное управляемое ракетное вооружение, обеспечивающее высо-
кую эффективность ведения перехвата и воздушных боев;
• совершенный комплекс бортового радиоэлектронного оборудования, в
первую очередь систему управления вооружением, обеспечивающую вы-
полнение истребителем всех видов боевых действий, в том числе группо-
вых, и применение оружия.
В целом ряде источников приводятся летные данные и некоторые харак-
теристики истребителя Су-27 [2.13-2.19, 3.1]. Фрагменты истории его разра-
ботки и испытаний даются в подразд. 2.4 настоящей книги. Остановимся на
выполняемых функциях, условиях боевых действий и общих боевых характе-
ристиках этого самолета.
264
Основным назначением истребителя Су-27 является завоевание господ-
ства в воздухе при решении задач фронтовой авиации и истребительной авиа-
ции ПВО. Самолет Су-27 предназначен для ведения активных воздушных бо-
ев, перехвата и уничтожения пи-
лотируемых и беспилотных ле-
тательных аппаратов противни-
ка. Летные данные, оборудова-
ние и вооружение обеспечивают
полуавтономные и автономные
групповые действия истребите-
лей Су-27 как над своей терри-
торией, так и над территорией
противника за линией фронта в
сложной помеховой обстановке.
В качестве вспомогательной
задачи Су-27 может наносить
удары по наземным целям в так-
тической и оперативной глубине
обороны противника в условиях
оптической видимости.
Обеспечивается выполнение
Рис. 3.1.2. Истребитель-перехватчик Су-27
всеракурсных атак воздушных целей на всех высотах боевого применения ис-
требителя, в том числе на фоне земли, водной поверхности и облачности,
днем и ночью, в простых и сложных метеоусловиях, при наличии организо-
ванных помех бортовым радиоэлектронным средствам и вооружению, а также
наземным системам наведения.
На формирование облика истребителя и концепции его применения оказа-
ли влияние особенности ожидаемых действий противника, среди которых:
• массированные удары тактической авиации по войскам и объектам фрон-
та и стратегической авиации по объектам территории страны; такие уда-
ры характеризуются высокой плотностью налета в полосе прорыва нашей
системы ПВО;
• групповые действия самолетов тактической, авианосной и стратегической
авиации в боевых порядках групп различного состава (от подразделений
самолетов до эскадрильи), прикрываемых истребителями и помехами;
• групповые воздушные бои истребителей, действующих в различных бое-
вых порядках; над своей территорией истребители противника поддержи-
ваются наземными АСУ, самолетами ДРЛО и помехами;
• действия истребителей из состояния высокой боевой готовности, в том
числе из положения дежурства в воздухе, что обеспечивает непрерыв-
ность воздействия с наращиванием сил по боевым порядкам нашей авиа-
ции, решающей задачи над территорией противника;
• применение авиации на таких режимах полета (по высоте и скорости), ко-
торые максимально способствуют преодолению наземных средств нашей
ПВО (большие и малые высоты) и обеспечивают решение задач самоле-
тами групп различного тактического назначения.
Характер ожидаемых боевых действий авиации противника потребовал
от нашей истребительной авиации нанесения массированных ударов, а от
265
авиационных частей и соединений, вооруженных самолетами Су-27, - выпол-
нения полуавтономных и автономных боевых действий наступательного
свойства, обеспечивающих создание превосходства или равенства в силах на
решающих направлениях и рубежах воздействия истребителей противника.
Широкий диапазон высотно-скоростных параметров (практический пото-
лок 18,5 км, максимальная скорость полета 1400 км/ч у земли и 2500 км/ч
на высоте) необходим самолету Су-27 для выполнения операций:
• перехвата (уничтожения) ударных самолетов тактической, авианосной и
стратегической авиации противника;
• успешного преодоления наземных средств ПВО противника;
• сопровождения своих ударных, разведывательных и других самолетов на
их скоростях и высотах.
Высокая маневренность (перегрузка до 9, скороподъемность 250...280 м/с,
тяговооруженность 1,1... 1,2, время разгона от V = 600 км/ч до V = 1100 км/ч на
Н = 1 км - 13...14 с, скорость разворота - до 21...22 град/с и др.) нужна самоле-
ту Су-27 для получения превосходства в ближних воздушных боях с истреби-
телями F-14, F-15, F-16, а также для своевременного выхода на исходный ру-
беж для атаки при перехвате воздушных целей типа SR-71, F-14, F-l 11, В-1.
Большая практическая дальность полета (до 3900 км при полной заправке
топливом), а также большие радиусы боевых действий (крейсерский рубеж -
до 1400 км) необходимы самолету Су-27 для решения боевых задач ПВО как
в условиях фронта, так и при действиях истребителей в периферийных и
внутренних районах страны.
Имеющееся на истребителе Су-27 вооружение обеспечивает поражение
воздушных целей в дальнем и ближнем маневренном воздушных боях при ав-
тономных и полуавтономных групповых действиях. Это достигается приме-
нением:
• всеракурсной ракеты средней дальности Р-27Э с повышенной энерговоо-
руженностью (94 с), превосходящей по своим характеристикам РСД
А1М-7 "Спэрроу" во всем диапазоне условий ее применения; ракета Р-
27Э позволяет в равных тактических условиях наносить упреждающий
удар или добиваться равного исхода с воздушным противником в даль-
нем ракетном бою;
• всеракурсной высокоманевренной ракеты ближнего воздушного боя Р-73,
превосходящей ракету AIM-9L "Сайдуиндер", и автоматической одно-
ствольной пушки ГШ-301 (калибра 30 мм с боезапасом 150 патронов,
скорострельностью 1500 выстр/мин), которые в сочетании с высокими
маневренными характеристиками истребителя и при наличии на борту
радиолокационной обзорно-прицельной системы и оптико-электронной
прицельной системы позволяют с высокой эффективностью поражать ис-
требители F-15, F-14 и F-16 в ближнем воздушном бою.
Истребитель Су-27 имеет бортовое радиоэлектронное оборудование, по-
зволяющее во всех условиях боевого применения вести групповые действия
как автономно, так и при взаимодействии с наземными АСУ типа "Рубеж-М",
"Воздух-1М", "Луч-2", авиационным комплексом РЛДН "Шмель" и комплек-
сом МиГ-31. Для этого на самолете устанавливается система управления воо-
266
ружением СУВ С-27, функционально связанная со специальным оборудова-
нием, включающим пилотажно-навигационный комплекс ПНК-27, типовой
комплекс связи ТКС-2, комплекс радиоэлектронного противодействия КРЭП.
Высокие боевые характеристики СУВ и всего авиационного комплекса
Су-27 обеспечиваются, в частности, такими параметрами и возможностями
бортовых информационных систем:
• бортовая радиолокационная станция БРЛС способна гарантированно об-
наруживать воздушные цели типа истребитель на дальностях 80... 100 км в
ППС и 30...40 км в ЗПС;
• БРЛС сопровождает "на проходе" до 10 целей и обеспечивает одновремен-
ный пуск ракет по двум целям;
• оптико-электронная прицельная система ОЭПС обнаруживает воздушные
цели на дальностях 50 км в ЗПС и 15 км в ППС.
Реализация всех видов боевых действий истребителем Су-27 стала воз-
можной благодаря:
• всеракурсному обнаружению воздушных целей бортовыми информаци-
онными системами и обстрелу их управляемыми ракетами;
• высокой помехозащищенности БРЛС и ОЭПС;
• взаимодействию информационных систем;
• сохранению обзора пространства во всех режимах работы БРЛС, в том
числе при применении ракет с тепловыми ГСН и в условиях радиопроти-
водействия;
• автоматической обработке тактической, навигационной, пилотажной ин-
формации и выдаче ее для отображения в систему индикации;
• автоматизированному обмену информацией между ведущим и ведомым в
боевых порядках группы;
• возможности нанесения одновременных и последовательных залповых
ударов каждым видом ракетного вооружения;
• автоматизации управления истребителем на этапах дальнего наведения
(в режимах командного наведения, бортового наведения и бортового
поиска) и при самонаведении на воздушную цель.
3.1.3. Идеология боевого применения современных
истребителей ПВО*
Боевые задачи воздушной обороны
В 80-е годы на вооружение авиации ПВО поступают истребители 4-го
поколения МиГ-31 и Су-27, способные решать боевые задачи в широком диа-
пазоне боевого применения. Совершенствуется система управления истреби-
тельной авиацией. На вооружение поступают автоматизированные системы
управления истребительными авиационными комплексами "Луч-2", "Рубеж",
"Рубеж-М". Более совершенными становятся средства воздушной радиосвязи.
П. 3.1.3 написан Гиндранковым В.В.. Слюняевым В.В., Герасимовым Г.П.
267
Наряду с развитием наземных систем управления мощный импульс получает
направление, связанное с развертыванием комплексов воздушного базирова-
ния на базе АК РЛДН А-50. Развитие систем управления, с одной стороны, и
авиационной техники, с другой, позволило реализовать концепцию уничто-
жения самолетов стратегической авиации - носителей крылатых ракет при их
действиях на северном стратегическом воздушном направлении до рубежей
их пуска. Особую роль при реализации этой концепции сыграло принятие на
вооружение авиационной системы дальнего перехвата.
Находящиеся в строю истребители МиГ-31 и Су-27 располагают новыми
по сравнению с предшествующими истребителями (МиГ-23, МиГ-25, Су-15)
боевыми и информационными возможностями. Они имеют:
• большие поисковые возможности бортовых радиолокационных прицелов
(радиолокационных станций) по фронту и диапазону высот, по дальности
и количеству обнаруживаемых и сопровождаемых целей;
• возможность работы со всеми существующими пунктами управления
(наведения), а также с перспективной межвидовой авиационной инфор-
мационно-управляющей системой;
• возможность передачи в НАСУ и АК РЛДН координат сопровождаемых
целей.
Значительно увеличились дальности действия истребителей, появилась
возможность дозаправки истребителей в воздухе. Эти новые качества позво-
лили принять за основу боевого применения авиационных комплексов груп-
повые автономные и полуавтономные действия. Такие действия позволяют
при ограниченной информации о противнике от внешних источников реали-
зовать различные тактические приемы ведения борьбы со средствами воз-
душного нападения путем рационального использования информационных и
огневых возможностей бортовых систем истребителей, наземных РЛС,
АК РЛДН, средств локации космического базирования, загоризонтных РЛС и
рационально распределить функцию управления боевыми действиями истре-
бителей между НАСУ различного уровня, воздушными пунктами управления
и бортовыми средствами управления самих истребителей.
Основными боевыми задачами при ведении боевых действий истреби-
тельными авиационными комплексами ПВО являются:
• противовоздушная оборона объектов (районов);
• воспрещение прорыва воздушного противника в глубь территории страны;
• прикрытие группировок войск, сил флота и аэродромов;
• прикрытие подразделений, частей других родов авиации в воздухе от атак
истребителей противника.
Кроме того, они могут привлекаться к выполнению задач по уничтоже-
нию воздушных десантов, а также к ведению воздушной разведки.
Все эти задачи решаются в условиях радиоэлектронного и огневого про-
тиводействия со стороны противника, использования им всех мер преодоле-
ния ПВО (полет на предельно малых и предельно больших высотах, маневри-
рование, действия крупными группами под прикрытием истребителей и лож-
ных целей, использование самолетных средств дальнего обнаружения,
радиоразведки, управления).
268
Отсюда вытекают функциональные требования, стоящие перед истреби-
тельными комплексами ПВО:
• уничтожение носителей стратегических и тактических крылатых ракет;
• уничтожение ударных самолетов тактической и авианосной (палуб-
ной) авиации;
• уничтожение самолетов управления, разведки, радиоэлектронного по-
давления;
• уничтожение стратегических (тактических) крылатых ракет воздушного,
морского, наземного базирования на всей глубине их проникновения.
Решение боевых задач истребителями при действии как над своей терри-
торией, так и в районе линии фронта или за линией фронта (ударные задачи
по наиболее важным воздушным объектам) связано с преодолением мер про-
тиводействия противника. При отражении воздушных ударов истребители
МиГ-31 и Су-27 решают задачи по налету, заранее организованному в боевые
порядки групп различного тактического назначения (ударные группы самоле-
тов, группы подавления средств ПВО, группы истребителей сопровождения,
самолеты радиоэлектронной борьбы и др.). При частичном или полном по-
давлении наших наземных (воздушных) информационных средств и систем
управления истребители действуют при низком качестве информации о воз-
душном противнике или отсутствии таковой. Кроме того, это может иметь
место при использовании противником малых высот полета, средств радио-
электронного противодействия, малозаметных летательных аппаратов и дру-
гих способов прорыва.
Для уменьшения эффективности ударов воздушного противника по воен-
но-промышленным объектам истребители, совместно с истребителями-
бомбардировщиками и штурмовиками, будут также решать боевые задачи по
уничтожению самолетов радиолокационного дозора и наведения, разведыва-
тельно-ударных комплексов, специальных помехопостановщиков, действую-
щих или в составе воздушного налета, или в районе линии боевого соприкос-
новения, или за линией фронта в глубине своей территории.
Групповые действия истребителей ПВО
Для эффективного решения боевых задач системе мер противодействия
воздушного противника противопоставлена система скоординированных по
времени и пространству способов действий истребителей ПВО МиГ-31 и
Су-27. Это достигается организацией групповых действий самолетов в назем-
ных (воздушных) системах управления, в том числе полуавтономных и авто-
номных боевых действий. Под групповыми действиями понимаются скоор-
динированные действия пары и более истребителей (групп истребителей)
против одной или нескольких целей (групп целей). Групповые действия ха-
рактеризуются:
• общими замыслом и боевыми порядками для группы истребителей (групп
истребителей);
• организацией траекторного, информационного, огневого и помехового
взаимодействий между истребителями группы (группами истребителей);
269
В полете - группа истребителей Су-27
• управлением действиями истребителей группы (групп истребителей) с
наземных (воздушных) пунктов управления и с борта ведущего (коман-
дира групп).
В случае отсутствия сплошного радиолокационного поля, когда управле-
ние и внешнее наведение истребителей затруднены, организуются полуавто-
номные боевые действия, заключающиеся в том, что истребители (группы)
выводятся в район поиска, используют информацию о координатах воздуш-
ного противника с пунктов
управления и с помощью борто-
вых средств обнаруживают и
уничтожают его. Автономные
боевые действия (самостоятель-
ный поиск и уничтожение воз-
душного противника) заключа-
ются в том, что истребители
(группы) выводятся в район ве-
роятного нахождения противни-
ка и самостоятельно с помощью
бортовых средств обнаруживают
и уничтожают воздушные цели.
Боевые порядки при групповых действиях определяются решаемыми
боевыми задачами и могут включать "фронт", "колонну", "пеленг", "клин" ис-
требителей, пар, звеньев, эскадрилий. В боевых порядках могут быть группы
различного тактического назначения:
• основная (поисково-ударная, ударная) - для непосредственного решения
боевой задачи;
• группы обеспечения (наращивания усилий, радиоэлектронной борьбы,
демонстрационных действий и др.) - для создания благоприятных усло-
вий действий основной группы;
• резервная - для решения внезапно возникающих боевых задач.
Между истребителями группы (группами истребителей) организуются
следующие виды взаимодействия:
• траекторное- согласование между истребителями (группами) их про-
странственно-временного положения и траекторий полета;
• информационное - обмен информацией между истребителями группы
(групп) об обнаруженных целях, об их взаимном положении, а также пе-
редача команд управления с борта ведущего - ведомым, с борта команди-
ра группы или командира объединенной группы - ведомым; информаци-
онное взаимодействие может включать передачу команд управления с на-
земных пунктов командирам групп и передачу информации об
обнаруженных целях с борта командира группы в наземные (воздушные)
пункты управления;
• огневое - согласование между истребителями (группами) способов вы-
полнения атаки, способов ведения огня, последовательности и момента
пуска ракет и т.д.;
270
• помеховое (радиоэлектронное) - согласование между истребителями
(группами) способов обеспечения взаимно-групповой и групповой обо-
роны средствами радиоэлектронного противодействия и вопросов элек-
тромагнитной совместимости.
Групповые действия организуются между истребителями как однотип-
ными, так и разнотипными (например, МиГ-31 и Су-27), а также в объеди-
ненных группах различного тактического назначения (истребители ПВО, ис-
требители-бомбардировщики, штурмовики).
В настоящее время авиация ПВО представлена двумя типами авиацион-
ных комплексов: общего назначения (Су-27) и дальнего действия (МиГ-31).
Данное обстоятельство явилось исходной предпосылкой для совместного
использования авиационных сил смешанного состава. Совместное примене-
ние разнотипных истребителей позволяет существенно расширить боевые
возможности смешанных групп в сравнении с однотипными и повысить их
помехоустойчивость в условиях радиолокационного противодействия
(рис. 3.1.3).
Рис.3.1.3. Боевые действия смешанной группы истребительных авиационных комплексов ПВО
В зависимости от выполняемой задачи боевые действия истребительные
авиационные комплексы ПВО могут вести группами в составе от 2 до 24 са-
молетов. Между истребителями группы (между командирами групп в объе-
диненной группе) обеспечивается информационное, огневое и помеховое
взаимодействие. Управление группами осуществляется через командира
группы (командира объединенной группы) (рис. 3.1.4).
271
Рис. 3.1.4. Виды взаимодействия истребительных авиационных комплексов ПВО
При групповых действиях в зависимости от состояния внешнего инфор-
мационного поля (регулярная, нерегулярная или разовая радиолокационная
информация о воздушном противнике) могут быть реализованы различные
способы управления истребителями (группами):
• централизованное с пунктов управления в режиме командного наведения;
• бортовое управление в режиме бортового наведения;
• бортовое управление в режиме бортового поиска.
Уровни управления, средства управления и объекты управления приведе-
ны в табл. 3.1.3.
Категории управления в групповых действиях
Таблица 3.1.3
Уровень управления Командир полка Командир объеди- ненной группы Ведущий Командир экипажа
Средства управления АСУ иап СУВ КОГ или АК РЛДН СУВ ведущего СУВ истре- бителя
Объекты управления Объединенные группы Группы истребителей Ведомые истребители Истребитель
Командир группы (КОГ или КГ) осуществляет централизованное управ-
ление своими подчиненными путем выдачи на их борта управляющей инфор-
272
мации высокого уровня обобщения. Командир объединенной группы, коман-
диры групп и ведомые формируют собственные траектории и команды
управления, подаваемые в САУ и на индикацию летчика для Су-27 или
штурмана-оператора для МиГ-31.
Степень (полнота) реализации групповых действий применительно к кон-
кретному истребителю определяется информационными возможностями его
бортовых активных и пассивных средств обнаружения и разведки целей, воз-
можностями вычислительного комплекса и программного обеспечения, ха-
рактеристиками комплекса средств связи, радиоэлектронного противодейст-
вия и вооружения.
Процесс ведения групповых действий современными истребителями
ПВО разделяется на этапы решения боевых задач (см. табл. 3.1.4), каждому из
которых соответствуют и способы действий.
Таблица 3.1.4
Этапы и способы групповых действий
Этапы боевых действий Основные способы боевых действий истребителей
Степень готовности к боевым дей- ствиям Дежурство на аэродроме в боевой готовности. Дежурство в воздухе в заданном районе
Принятие решения на боевые дей- ствия Групповые действия при централизованном управлении. Групповые полуавтономные действия. Групповые автономные действия
Выход в боевое соприкосновение с противником Командное наведение. Бортовое наведение. Бортовой поиск
Атака воздушных целей с пуском ракет (воздушный бой) По целеуказанию ведущего группы. По рекомендации алгоритма целераспределения. Одновременная или последовательная атака одиночной или групповой цели с одного или разных направлений, обстрел целей одиночно или серией ракет. Повторная атака
Выход из атаки (воздушного боя) По командам КП (ПН). По указанию ведущего. Самостоятельно
Возвращение на аэродром и вос- становление боеготовности По командам КП (ПН). По указанию ведущего. С амостоятельно
Наиболее сложными этапами, от которых зависит эффективность истре-
бителей при групповых действиях, являются этапы от выхода в боевое сопри-
косновение до выхода из боя. Главные факторы, определяющие реализацию
потенциальных возможностей истребителей на этих этапах:
• возможность выдерживания ведомыми заданного положения в боевом
порядке, контроль относительного положения и перемещения самолетов
в группе (или групп) и режимов их полета;
18 - 4094
273
• возможность качественного решения задач отождествления целей, селек-
ции, выбора целей для атаки, целераспределения, выбора способа атаки;
• возможность оперативного решения указанных задач, определяемая вы-
сокой степенью автоматизации;
• обеспечение электромагнитной совместимости радиоэлектронных
средств на бортах взаимодействующих истребителей;
• качество функционирования бортовых радиоэлектронных средств в усло-
виях организованных помех.
В зависимости от состояния информационной системы и системы управ-
ления может быть реализован один из следующих способов выхода в боевое
соприкосновение истребителей с воздушным противником при групповых
действиях:
• выход группы перехватчиков в боевое соприкосновение по информации и
при управлении с наземных командных пунктов или с борта АК РЛДН,
выведенных предварительно в зоны дежурства на угрожаемых направле-
ниях по внешней информации от всех видов разведки;
• выход группы перехватчиков по информации поисково-ударной группы,
выведенной предварительно в зоны дежурства по внешней информации;
• выход группы перехватчиков методом бортового наведения или бортово-
го поиска в зонах вероятного пролета воздушного противника по инфор-
мации от различных средств разведки.
При действии ударных групп истребителей по информации с наземных
систем управления или с борта АК РЛДН реализуется способ командного на-
ведения групп путем передачи на борт ведущих групп команд наведения (в
этом случае ведомые выдерживают заданный боевой порядок).
При неустойчивой работе каналов наземных (воздушных) систем управ-
ления выполняется бортовое наведение ударных групп путем передачи на
борт ведущего координатной информации параметров полета целей. В случае
нерегулярной или разовой информации о воздушном противнике ударные
группы реализуют способ бортового поиска.
Этап выхода в боевое соприкосновение заканчивается обнаружением и
захватом бортовыми радиоэлектронными средствами истребителей самолетов
противника. Об обнаруженных целях экипажи истребителей докладываю! и
передают информацию по телекодовым каналам связи: ведомый - ведущий -
командир объединенной группы — наземный пункт управления.
На этапе выхода в боевое соприкосновение наземный (воздушный) КП
формирует состав группы и режим ее полета, а ведущий группы с помощью
бортового радиоэлектронного комплекса, вычислительного комплекса и ин-
дикационного обеспечения выполняет следующие функции:
• управляет сбором группы (совместно с КП);
• реализует заданный способ выхода в боевое соприкосновение (КН, БН,
БП), боевой порядок группы и параметры полета; ч
• обнаруживает цели и организует информационный обмен в группе;
• передает на наземные пункты управления информацию о внешней обста-
новке.
274
На этапе принятия решения на ведение боя и в процессе боя ведущий
оценивает воздушную обстановку, выбирает рациональный способ ведения
боя, выбирает цели для атаки, производит целераспределение, уточняет спо-
собы взаимодействия, определяет способ ведения огня, координирует дейст-
вия истребителей на основе принятого решения, информирует ведомых об уг-
розах, уточняет боевые порядки, выполняет атаку выбранной цели, реализует
конкретные приемы боя.
Примеры организации групповых действий показаны на рис. 3.1.5-3.1.8.
Область возможного
нахождения целей
Рис. 3.1.5. Самостоятельный поиск целей парой истребителей в заданном районе
Область возможного
нахождения целей
Рис.3.1.6. Поиск целей парой истребителей по разовой информации
Для реализации групповых действий истребителей используется соответ-
ствующее аппаратурное, алгоритмическое и индикационное обеспечение.
Аппаратурное обеспечение представлено в виде средств определения взаим-
ных координат истребителей и комплекса связи и передачи данных для ин-
формационного обмена между истребителями (группами) в целях организа-
ции всех видов взаимодействий.
275
Рис 3.1.7. Поиск целей парой истребителей в полосе ответственности
Вероятное направление
полета целей
Боевые алгоритмы СУВ обеспечивают функционирование бортовых ин-
формационных средств, формирование заданных параметров наведения в со-
ответствии со способом выхода в боевое соприкосновение, поиск целей груп-
пой, обобщение информации о целях, целераспределение, организацию обме-
на информацией между командиром объединенной группы (командиром
группы) и ведомым, организацию комплексного радиоэлектронного и огйево-
го противодействия и взаимодействия.
276
3.1.4. Телекодовые системы связи
на борту самолетов МиГ-31 и Су-27’
На борту перехватчика МиГ-31 установлена усовершенствованная аппа-
ратура радиовизирования и управления "Радуга-Борт-МБ" (КРУ) и телекодо-
вая система обмена данными в группе АПД-518.
Бортовая аппаратура КРУ предназначена для решения следующих задач:
• приема и декодирования сигналов запроса наземных станций САЗО;
• приема информации о целях и перехватчике, команд наведения и управ-
ления перехватчиком, передаваемых наземными автоматизированными
системами управления;
• декодирования и преобразования принятой информации для выдачи в
бортовые системы обработки и отображения.
Из аппаратуры "Радуга-Борт" информация, полученная от наземной АСУ,
поступает для отработки в САУ-155МП, в БЦВС "А-15" системы "Заслон" и
для отображения на табло сигнализации прицельно-пилотажного индикатора
ППИ-70В.
Внешними источниками информации для аппаратуры КРУ являются авто-
матизированные системы типа "Рубеж-М", "Луч-2" и "Воздух-1М", оборудо-
ванные радиолиниями "Лазурь-М" и "Радуга-СПК".
Информация по радиолиниям "Радуга-СПК" и "Лазурь-М" поступает в ап-
паратуру КРУ в виде наборов команд, содержащих данные наведения, целеука-
зания, разовые команды, координатную поддержку по целям для полуавтоном-
ных действий. Темп передачи наборов команд по радиолинии "Лазурь-М" со-
ставляет 1,5...4,5 с, по радиолинии "Радуга-СПК" - 5 с. Информация в систему
"Заслон" из аппаратуры КРУ поступает в виде цифрового последовательного
кода, аналоговых сигналов и разовых команд.
Конструктивно бортовая аппаратура КРУ состоит из следующих блоков:
• приемника сигналов системы передачи команд;
• дешифратора сигналов радиоуправления, передаваемых наземными
станциями;
• блока связи;
• щита управления пилота.
Бортовая аппаратура передачи данных (АПД) предназначена для обмена
информацией между взаимодействующими перехватчиками. Передача ин-
формации через АПД-518 выполняется в следующих направлениях:
• от ведущего группы - ведомым перехватчикам;
• от ведомых перехватчиков - ведущему;
• от ведущего одной группы - ведущему другой группы;
• от ведущего перехватчика в наземную АСУ.
Передача сигналов осуществляется по радиоканалам аппаратуры "Ради-
кал-ПД". Источником и потребителем информации, передаваемой по линии
АПД, является БЦВС системы "Заслон".
П. 3.1.4 написан В. С. Зиничем.
277
В состав АПД-518 входят:
• блок ввода и кодирования информации;
• блок декодирования и вывода информации;
• блок управления;
• аппаратура "Радикал-ПД".
Собственных органов управления (щитков, пультов и т. д.) АПД-518 не
имеет, она получает сигналы управления режимами работы от переключате-
лей, расположенных на пульте системы "Заслон" и пульте аппаратуры опре-
деления взаимных координат “Радикал-ОВК”.
Блок управления вырабатывает сигналы управления вводом-выводом ин-
формации, процессом ее передачи и приема по радиоканалу, а также процес-
сом самоконтроля и автоматизированного контроля АПД-518. Обмен инфор-
мацией между взаимодействующими перехватчиками выполняется в соответ-
ствии с циклограммами. При этом реализованы два режима работы:
• совмещенный (АПД + ОВК), при котором АПД-518 и "Радикал-ОВК" ра-
ботают по совмещенной циклограмме обмена информацией;
• автономный (АПД), при котором аппаратура АПД-518 работает по авто-
номной циклограмме.
В совмещенном режиме определенный в такте ОВК пеленг ведомого (ве-
дущего) используется в БЦВС системы "Заслон" для определения стороны
абонента в такте передачи данных передающей антенны аппаратуры "Ради-
кал-ПД" - левой или правой.
Автономный режим предназначен для обеспечения выполнения задания в
случае отказа аппаратуры "Радикал-ОВК", при этом решаются те же задачи,
что и в совмещенном режиме, но меняется характер циклограммы.
В совмещенном режиме перед тактом передачи информации на i-й пере-
хватчик определяется "сторона" данного перехватчика, по которой передаю-
щие антенны имели определенную направленность; в автономном режиме ра-
боты возникает необходимость передачи одних и тех же данных за два полу-
такта в правую и левую антенны. В совмещенном и автономном режимах
работы обмен информацией между перехватчиками осуществляется по одной
из циклограмм взаимодействия:
• "группа", по которой выполняется обмен информацией между ведущим и
ведомым в группе из трех-четырех перехватчиков;
• "парный обмен", по которой производится обмен информацией между
ведущим и ведомым в паре;
• "обмен ведущих", по которой осуществляется обмен информацией между
ведущими различных звеньев;
• "один", по которой возможна периодическая передача информации в
НАСУ одиночным перехватчиком.
Обмен информацией и межсамолетная навигация осуществляются на час-
тотном канале, отведенном для данной группы. Общая программа обмена ин-
формацией внутри группы регулируется синхронизатором блока управления
ведущего группы, работающего в непрерывном режиме. Для синхронизации
278
циклограммы ведомых служит информация, принятая от ведущего. Передача
информации от ведомого ведущему производится сразу по окончании приема
ведомым от ведущего пакета, содержащего координаты движения перехват-
чиков и целей.
Во всех режимах работы АПД-518 циклограммы составлены из одних и
тех же элементов - тактов определения взаимных координат ОВК и тактов пе-
редачи данных, чередующихся в определенной последовательности.
Совокупность тактов, обеспечивающих однократное последовательное
выполнение всех необходимых операций для данной циклограммы, составля-
ет цикл работы ОВК и передачи данных. В циклограмме "группа" цикл обме-
на состоит из трех тактов определения взаимных координат и передачи дан-
ных и одного такта передачи данных в наземную систему. По циклограмме
"группа" ведущий после обмена с двумя ведомыми может осуществить пере-
дачу информации в НАСУ. По циклограмме "парный обмен" ведущий может
передавать информацию в НАСУ в каждом третьем такте определения взаим-
ных координат - передачи данных.
При обмене ведущих связь в группе с ведомыми и возможность связи с
НАСУ прерывается. В режиме "один" возможна передача пакета данных в
НАСУ. Операции ОВК и передачи данных на ведущем выполняются в сле-
дующей последовательности:
• такт ОВК (определение пеленга фс и дальности рс ведомого относительно
ведущего);
• такт передачи информации ведомому;
• такт приема информации от ведомого.
Значение пеленга используется в БЦВС системы "Заслон" для определе-
ния стороны передачи информации ведомому в такте передачи данных. На
ведомом операции определения взаимных координат и передачи данных про-
изводятся в обратной последовательности.
Основными факторами, ограничивающими длительность обмена инфор-
мацией в автономном режиме, являются допустимая нагрузочная способность
передатчика "Радикал-ПД" и необходимость двукратной передачи каждого
пакета одному и тому же абоненту (в сторону правого и левого бортов).
В циклограммах "группа", "парный обмен", "обмен ведущих" цикл обмена
ведущего состоит из двух тактов передачи данных ведомому, двух тактов воз-
можной передачи в НАСУ и передаваемых в правую и левую антенны.
На самолете Су-27 установлены два типа телекодовой аппаратуры: для
связи с НАСУ (КРУ) и для межбортового обмена тактической информацией в
группе и в объединенной группе (ТКС-2).
Аппаратура связи с НАСУ содержит каналы "Лазурь", "Бирюза" и "Раду-
га", соответственно обеспечивающие передачу тех наборов команд, которые
свойственны данным каналам. Задачи и устройство аппаратуры связи с НАСУ
аналогичны задачам и устройству аппаратуры “Радуга-Борт”, установленной
на самолете МиГ-31.
Телекодовая аппаратура передачи данных ТКС-2 обеспечивает двухуров-
невый обмен тактической информацией в объединенной группе. На верхнем
уровне осуществляется обмен между командиром объединенной группы и
командирами групп. Всего в объединенной группе может быть до четырех
279
групп, каждая из которых может состоять из четырех самолетов. При работе
КОГа с командирами групп используется временное разделение. При этом
аппаратура ТКС-2 работает на частоте межгруппового обмена. Командиры
групп обмениваются со своими ведомыми на своей частоте. КОГ имеет трех
ведомых и является командиром собственной группы. Осуществляется двух-
сторонний обмен формулярами данных по специальной циклограмме.
Цифровая информация, циркулирующая по телекодовой линии, форми-
руется в кодограммы. В состав кодограммы входят: синхропосылка аппарату-
ры ЗАС “Лань”, служебно-адресная часть, имитостойкая вставка, служебная
открытая информация и формуляр передаваемых данных. Формуляр данных
включает произвольный набор из унифицированных символов. В перечень
унифицированных массивов данных входят: массив управления обменом,
массив воздушного объекта, массив наземного объекта, массив приращения
географических координат, массив данных самолета, массив радиоданных,
массив донесений и распоряжений, массив контрольного времени.
Каждый массив данных идентифицируется своим типом. Информация
для каждого абонента сети размещается в формуляре начиная с массива
управления обменом, содержащего адрес абонента. При выдаче данных в сис-
тему управления вооружением С-27 ТКС упаковывает слово, принятое по ра-
диолинии, в слова последовательного кода СУВ.
Автоматический обмен информацией осуществляется путем временного
разделения абонентов внутри одной группы или ведущих групп по принципу
"запрос-ответ" (обмен производится только по запросу инициатора обмена) и
частотного разделения абонентов каждой группы. Управляющее слово вклю-
чает: количество самолетов в группе; количество передаваемых целей; номер
самолета для индикации; признак смены условной точки; квитанцию получе-
ния условной точки; количество самолетов в группе, занятых атакой.
3.2. Ракетное вооружение самолетов МиГ-31, Су-27
и его применение
Ракеты класса "воздух-воздух" - основное оружие истребителей МиГ-31
и Су-27 при решении ими задач противовоздушной обороны.
Перехватчик МиГ-31 (рис.3.2.1) имеет на вооружении:
• четыре ракеты большой дальности Р-33;
• четыре ракеты малой дальности Р-60;
• шесть ракет ближнего маневренного боя Р-73.
В качестве дополнительного вооружения могут подвешиваться две раке-
ты средней дальности Р-40Т.
Рис.З.2.1. Перехватчик МиГ-31 и его ракетное вооружение
На модернизированном истребителе МиГ-31М предполагается применять
шесть ракет большой дальности Р-37.
Истребитель Су-27 в режимах перехвата и атаки воздушных целей ис-
пользует четыре всеракурсные ракеты средней дальности Р-27 с радиолока-
ционной ГСН (Р-27Р) и тепловой ГСН (Р-27Т), а также шесть ракет ближнего
маневренного воздушного боя Р-73. В состав вооружения включены и ракеты
281
f \
Рис.3.2.2. Ракетное вооружение истребителя Су-27
увеличенной дальности - "энергетические" Р-27ЭР и Р-27ЭТ, что значительно
повышает возможности самолета при ведении дальнего ракетного воздушно-
го боя (рис. 3.2.2).
Ракетное вооружение класса "воздух-воздух" модернизированного само-
лета Су-35 составляют: шесть ракет Р-27Р (Р-27ЭР) или Р-27Т (Р-27ЭТ),
шесть ракет Р-73, 12 ракет РВВ-АЕ.
Рис. 3.2.3. Ракеты класса "воздух - воздух" истребителей МиГ-31 и Су-27
282
Общий вид, конструкция и габариты ракет класса "воздух-воздух" истре-
бителей МиГ-31 и Су-27 представлены на рис. 3.2.3, а основные сведения о
них и их тактико-технические характеристики - в табл. 3.2.1, 3.2.2.
Таблица 3.2.1
Тактико-технические характеристики ракет малой дальности
Параметры Р-60 Р-60М Р-73
Разработчик НПО " Молния"
Год принятия на вооружение 1973 1979 1983
Самолеты-носители / МиГ-21бис/4; МиГ-23 М/4; МиГ-23 МЛ / 4; МиГ-29 / 6;
боекомплект МиГ-23 МЛ / 4 ; МиГ-23П / 4; Су-27 / 6; Су-35 / 6;
Су-15 / 4; Су-24 / 2; Су-25 / 2; Су-34 / 8; Су-33 / 6;
Як-38/2; МиГ-31 / 4 МиГ-29СМТ / 6; МиГ-31 / 6
Бортовая АСП-23 ДЦ; "Сапфир-21" ; АСП-23 ДЦ; "Сапфир-23МЛ";
прицельная система "Сапфир-23 М"; "Сапфир-23 МЛ"; СУВ С-29; СУВ "Заслон";
СУВ "Заслон "; ТП-8ТК СУВ С-27; ТП-8ТК ; НСЦ
Аэродинамическая "Утка” с дестабилизаторами "Утка" с дестабилизаторами
схема И рол леронам и и элеронами
Масса, кг 43,5 44 105
Масса БЧ, кг 3,0 3.5 7,8
Тип БЧ Стержневая
Диаметр корпуса, м 0,12 0,17
Длина,м 2,1 2,9
Размах оперения, м 0.39 0,51
Энерговооружен- 57 74
ность, кг-с/ кг
Тип двигателя РДТТ однорежимный РДТТ двухрежимный
Целеуказание Наведение с упреждением в ЗПС Наведение с упреждением,
головке фцу = ±12° фцу = ± 20 0 <Рцу = + 45°
Тип системы наведения ИГС ИГС с термо- электрическим неохлаждаемая охлаждением Всеракурсная ИГС, охлаждаемая азотом
Метод наведения Пропорциональное наведение
Максимальная ско- рость цели, км /ч 2500 2700
Диапазон высот по- ражения цели, км Максимальная 0,03...20 0,03...20
дальность пуска в ППС / ЗПС, км -/8 9/12
Минимальная
дальность пуска в ЗПС, км 0,3 0,25 0,3
Перегрузка перехва- тываемой цели 6 8 12
283
Тактико-технические характеристики ракет
средней и большой дальности
Таблица 3.2.2
Параметры Р-27 Р-27Э РВВ-АЕ Р-33
Разработчик ГосМКБ" Вымпел"
Год принятия на вооружение 1987 1990 1994 1981
Самолеты- носители / боекомплект МиГ-29/4; МиГ-29СМТ/4; Су-27 / 4; Су-35 / 4; Су-34/4; Су-33/6 МиГ-29С/6-8; МиГ-29СМТ / 6-8; Су-35 /10-14; Су-34/12; Су-33/10-14 МиГ-31/4
Бортовая при* цельная система СУВ С-29; СУВ С-29М; СУВ С-27; СУВ С-27М СУВ С-29М; СУВС-27М СУВ "Заслон"
Аэродинамическая схема "Утка" с дестабилизаторами Нормальная с решетчатыми рулями Нормальная
Масса, кг 253 354 177 520
Масса БЧ, кг 39 21 47
ТипБЧ Стержневая Мультикумулятивная Стержневая Осколочная
Диаметр корпуса, м 0,23 0,23/0,26 0,20 0,38
Длина, м 3,96 4,56 3,60 4,15
Размах оперения, м 0,77 0,8 0,7 (складывающееся) 1.12
Энерговооружен- ность, кг-с/ кг 62 94 79 73
Тип РДТТ Одно- Двух- режим- режимный ный Однорежимный Двухрежимный
Целеуказание го- ловке <р„» - ± 50 ° для РГС; <р„? = ± 55 ° для ИГС <р„у = ± 180“ фц, = ± 60 “
Тип системы наведения Инерциально-корректи- русмое наведение; само- наведение с захватом ПАРГС на траектории; ИГС, охлаждаемая азотом Инерциалыю-корректи- руемое наведение; са- мона ведение с захватом АРГС на траектории Инерциальное наведение; само- наведение с захва- том ПАРГС на траектории
Метод наведения Пропорциональное наведение
Максимальная скорость цели, км/ч 3500 3600 3700
Диапазон высот по- ражения цели, км 0,03.„25 0,03.„27 0,02. „25 0,05.„28
Максимальная дальность пуска в ППС / ЗПС, км 60/18 70/43 60/20 120/40
Минимальная дальность пуска в ЗПС, км 0,5 0,3 2,5
Перегрузка пере- хватываемой цели 8 12 3...4
284
3.2.1. Управляемая ракета большой дальности Р-33
Ракета большой дальности Р-33 (рис. 3.2.4) оснащена только радиолокаци-
онной головкой самонаведения. Она рассчитана на многоканальное наведение,
разрабатывалась исключительно для истребителя, имеющего на борту РЛС с
фазированной антенной решеткой, позволяющей осуществлять полуактивное
наведение нескольких ракет на несколько целей одновременно. При этом са-
монаведение каждой из пущенных ракет выполняется в прерывистом режиме,
так как подсвет целей осуществляется последовательно, причем часть времени
тратится на сохранение обзора и организацию захвата новых целей.
Полуактивная РГС ракеты Р-33 оснащена вычислителем, прогнозирую-
щим угловую скорость линии визирования, аналогичным установленному в
ракете Р-24Р. Вычислитель - модель кинематических соотношений относи-
тельного движения - получает начальные условия (относительную дальность,
скорость сближения и проекции угловой скорости линии дальности) в полет-
Рис. 3.2.4. Ракета Р-33
ном задании.
Особенность вычислителя ракеты
Р-33, в отличие от вычислителя ракеты
Р-24Р, состоит в том, что он начинает
свою работу с момента окончания от-
работки системой стабилизации стар-
товых возмущений. Поэтому полет ра-
кеты до момента включения вычисли-
теля должен привести ракету в заранее
назначенную точку, а на борту истре-
бителя должны вычисляться оценки
дальности, скорости сближения и уг-
ловой скорости линии дальности спус-
тя 2 с после схода. Начальное положе-
ние антенны (угловое целеуказание)
также должно прогнозироваться на са-
молете-носителе перед пуском на ука-
занный момент.
В процессе полета ракеты до за-
хвата ориентация антенны определяет-
ся оценками угловой скорости линии
дальности, вырабатываемыми вычис-
лителем с учетом текущей измеренной перегрузки ракеты. Теми же оценками
угловой скорости определяется формирование заданной перегрузки.
В головке используется индикаторный гиростабилизатор, построенный на
базе датчиков угловой скорости. Захват цели головкой самонаведения может
происходить спустя треть полетного времени ракеты. Это достигается, в ча-
стности, благодаря высокой точности оценивания угловой скорости линии ви-
зирования БРЛС носителя (ошибки составляют 0,01...0,03 град/с).
Доплеровская головка самонаведения отличается строгим согласованием
всех протекающих в ней процессов с интервалами подсвета назначенной для
нее цели, равными 20 мс. В течение указанного времени производится поиск
цели по частоте, а в процессе сопровождения выполняется измерение частот-
285
ной расстройки и углового рассогласования. Все остальное время до следую-
щего интервала подсвета головка "заперта" для приема и сигналы, формируе-
мые ею, вычисляются в результате прогноза по предыдущим измерениям.
В головке реализован способ пеленгации с обработкой сигнала двухка-
нальным приемником, реализующим метод так называемого скрытного кони-
ческого сканирования с компенсацией. В каждом канале независимо от дру-
гих в качестве нормирующих устройств используются схемы АРУ. Точность
измерения угловых координат цели головкой, в том числе и при амплитудных
помехах, приближается к точности моноимпульсной системы.
Дальность захвата головкой цели типа Ту-16 составляет около 90 км, что
с учетом инерциального наведения до захвата обеспечивает возможность пус-
ка с дальности порядка 120... 130 км.
Система самонаведения после захвата последовательно имеет две структуры:
• с момента захвата на большей части пути используется модель кинемати-
ческих соотношений в качестве фильтра измерений угловой скорости
(вместо ускорения цели на вход модели подается разность измерения уг-
ловой скорости и ее оценки);
• затем она строится как стационарная (замкнутый контур углового сопро-
вождения головки формирует измерения угловой скорости линии визи-
рования, которые пропускаются через стационарный фильтр и после ум-
ножения на измеренную скорость сближения образуют заданную пере-
грузку).
Некоторое уменьшение требований к величине градиента синхронной
ошибки достигнуто благодаря применению отрицательной обратной связи по
скорости изменения угла отклонения антенны.
Ракета Р-33 построена по нормальной схеме. Ее конструкция традицион-
на, а на компоновку и аэродинамические формы повлияла необходимость
конформной подвески ракеты под фюзеляжем самолетов МиГ-31.
Характеристики ракеты большой дальности Р-37 и ее системы управле-
ния лучше, чем ракеты Р-33: выше располагаемые перегрузки, допустимые
дальности пуска, помехозащищенность, особенно при наведении на низколе-
тящие и групповые цели.
Ракета Р-37, главным образом за счет некоторого повышения энерговоо-
руженности и существенного увеличения времени работы энергоблока, прин-
ципиально нового построения системы управления, обеспечивает возмож-
ность пуска с дальности свыше 300 км.
Ракета может применяться как с модернизированного истребителя
МиГ-31, так и с истребителей Су-27, Су-35 при условии доработки их про-
граммного обеспечения.
3.2.2. Управляемые ракеты средней дальности
Р-27(Р-27Э) и РВВ-АЕ
Ракеты Р-27 и Р-27Э построены по схеме, средней между схемами "утка"
и поворотное крыло (рис. 3.2.5). Обе ракеты разрабатывались одновременно,
причем так, что они отличаются только двигателями и положением установ-
ленных на них крыльев. Разница в массе и форме РГС и ИГС компенсируется
286
дестабилизаторами. Характеристики ракет выбраны таким образом, что сис-
тема стабилизации, ее структура и настройки для всех вариантов ракеты Р-27
одинаковы.
Необычная форма рулей (их размах существенно больше размаха крыль-
ев) позволила увеличить углы атаки, при которых сохраняется управляемость
ракеты по крену.
Ракета Р-27 (Р-27Э) явилась первой ракетой с инерциально корректируе-
мой системой наведения. В ней удалось ослабить влияние ошибок в задании
самолетом-носителем оценок относительного движения на момент пуска (ис-
ключить необходимость окончания переходного процесса после захвата цели
БРЛС) и, практически независимо от маневра цели, обеспечить превышение
дальности пуска в 2,5 раза над дальностью захвата цели головкой.
Ракета создавалась тогда, когда на ней еще не использовалась БЦВМ, по-
этому было необходимо свести вычисления на борту ракеты к минимуму. Это
достигнуто тем, что инерциальная система ракеты построена на базе трехсте-
пенного гиростабилизатора антенны, сохраняющего свое положение в про-
странстве с момента пуска до захвата цели и выступающего в качестве гиро-
стабилизированной платформы, несущей на себе датчики линейных ускорений.
Рис. 3.2.5. Ракета Р-27
Перед пуском с истребителя в вычислитель ракеты вводится информация
об углах, задающих такое положение антенны в пространстве, при котором
ось Ха антенны выставляется в направлении упрежденного на момент захвата
цели положения линии дальности ракета - цель, а оси Ya и Za направлены в
верхнюю полусферу симметрично относительно вертикальной плоскости, со-
держащей ось Ха. Положение антенной системы координат ракеты выступает
в качестве единой инерциальной системы координат ракеты и носителя. Оно
запоминается и на ракете, и на носителе.
Кроме того, в вычислитель вводятся проекции векторов относительных
дальности и скорости на оси антенной системы координат (рис. 3.2.6). Они
служат в качестве начальных условий при интегрировании показаний уста-
новленных на антенне датчиков линейных ускорений. По существу, здесь ис-
пользуется та же модель кинематических соотношений, но в неподвижной
287
Инициально* коррем и ру ечым
режим
Рис. 3.2.6. Схема вычислителя ракеты Р-27Р
системе координат. После пуска ракеты самолет-носитель с помощью БРЛС
продолжает измерять относительные координаты цели.
Интегрирование ускорений носителя с той же методической погрешно-
стью в вычислении проекций ускорения силы тяжести, что и в переданных на
ракету перед пуском, позволяет определять оценки координат цели в инерци-
альной системе координат. Сопоставление оценок с экстраполированными по
ранее переданным на ракету данными образует поправки к данным о цели,
причем уточнение сведений о цели, сформированных на носителе, передается
на ракету в проекциях на оси инерциальной системы. Эти поправки переда-
ются на ракету по каналу радиокоррекции. В результате в каждый момент
времени на ракете формируются оценки векторов дальности и относительной
скорости.
Ракета управляется таким образом, чтобы обнулялись проекции вектора
дальности на оси Ya и Za антенной системы координат, в результате чего ось
Ха антенны оказывается наилучшим образом направленной на цель.
Заданное ускорение ракеты в плоскости, перпендикулярной оси Ха, для
этого поддерживается равным
l,5/r + ijp3
Т2
р*
где Я - постоянный коэффициент; /± и - проекции оценок векторов отно-
сительных дальности и скорости соответственно; Тр1 — оценка времени, ос-
тавшегося до разрешения захвата цели.
288
Эта зависимость близка к закону пропорциональной навигации
где То- время, оставшееся до встречи; сумма /j +ZjT() представляет собой
пролет, который путем деления на То превращается в произведение скорости
сближения на угловую скорость линии дальности.
Коэффициент 1,5 при составляющей I обеспечивает совмещение оценки
вектора дальности с осью Ха - параллельное сближение с выводом ракеты на
линию, заданную осью Ха, причем этот вывод приурочен к моменту разреше-
ния захвата.
На рис. 3.2.6 обозначено: /±, - оценки линейного рассогласования и
его производной - проекции оценок векторов относительных дальности и ско-
рости на плоскость, перпендикулярную оси ХА, вводятся перед пуском в по-
летном задании и уточняются в процессе полета до захвата командами радио-
коррекции; JPL - текущее значение проекции ускорения ракеты на плоскость,
перпендикулярную оси Ха, измеряется датчиком линейных ускорений, уста-
новленным на антенне; J*L - заданное ускорение ракеты в плоскости, пер-
пендикулярной оси Ха; J „ — оценка ускорения цели; q4 , q - измерение и
оценка угла наклона (азимута) линии дальности; qA - угол наклона (азимут)
антенны; к/, к2, кз — коэффициенты фильтрации; Тр) - время, оставшееся до
разрешения захвата цели головкой; То — время, оставшееся до встречи;
Тц- предполагаемая инерционность цели; Я- навигационная постоянная;
а - коэффициент, обеспечивающий частичную компенсацию ускорения цели;
IR | - скорость сближения.
Угловой дискриминатор представлен сумматором, формирующим раз-
ность q - qA~ q - q4, представляющую собой одновременно измеренную
ошибку слежения и невязку фильтра. Ключ на выходе дискриминатора замы-
кается командой "Захват по углу".
После захвата цели модель кинематических соотношений в неподвижной
системе координат преобразуется в модель во вращающейся системе коорди-
нат, связанной с линией дальности. Эта модель воспроизводит преобразова-
ние относительного ускорения в произведение угловой скорости линии визи-
рования на скорость сближения О. IR
Представив время Т„, оставшееся до встречи, как t, где момент
встречи, a t - текущее время, и пренебрегая переменностью скорости сближе-
ния, можно перейти от соответствующего данной модели уравнения
— [Q|7? I (to-t)]-Q |я | = J°
dt
к более привычному
289
19-4094
— [П|Я I (to-1)]-20 |я I = Jl,
dt
где J ° - проекция относительного ускорения на плоскость, перпендикуляр-
ную дальности.
Принятая форма уравнения удобна потому, что в момент захвата линей-
ное рассогласование /± практически обнулено (оценка дальности ракета-
цель совпадает по направлению с осью Ха и i ± оказывается равной QIR I
(t0 -1)] - начальному условию на интеграторе модели, действующей на этапе
самонаведения).
В процессе самонаведения в РГС используется калмановский фильтр,
причем гиростабилизатор антенны выступает в качестве интегратора, форми-
рующего оценки азимута и угла места линии дальности (см. рис. 3.2.6). Это
позволило наиболее естественно реализовать управление антенной в моменты
перерывов информации, защитить РГС от вынесенных по углу источников
помех. Коэффициенты фильтрации кь к2, к3 выбраны постоянными, но вклю-
чаемыми после захвата неодновременно (сначала по положению, затем по
скорости и ускорению).
Для реализации управления в антенной системе координат в контуре ста-
билизации используются обратные связи по линейному ускорению (перегруз-
ке) в проекциях на оси Ya и Za, для чего применяются упомянутые выше дат-
чики, установленные на антенне.
Чтобы при маневрировании ракета не вышла на предельные углы относи-
тельно антенны, застабилизированной в пространстве, и не разрушила инер-
циальный базис, в контуре стабилизации используется так называемый кво-
рум-элемент (устройство, выбирающее алгебраическое среднее из трех сигна-
лов), в котором ошибка регулирования по ускорению подменяется ошибкой
удержания ракеты на предельном пеленге. При этом на вход разомкнутого по
ускорению контура стабилизации подается среднее значение трех величин:
Кр (фтах — ф)? Kj (J — J), Kq> (— фтах — ф)-
Пока (фтах - ф) И (- фтах ~ ф) ОСТЭЮТСЯ боЛЬШИМ ПОЛОЖИТСЛЬНЫМ И боЛЬ-
шим по модулю отрицательным числами, управление ракетой ведется так, что-
бы по возможности обнулялась разность (J - J). При приближении пеленга к
положительному или отрицательному предельному значению алгоритм плавно
переключается на обнуление меньшей из разностей (фтах - ф) или (-фтах - Ф)-
Это происходит потому, что разность (J - J) перестает при этом быть средней
из трех перечисленных величин. При смене знака заданного ускорения раз-
ность (J* - J) снова оказывается средней из величин и становится определяю-
щей для процесса регулирования ускорения ракеты. Бортовая РЛС поочередно
формирует квазинепрерывный сигнал для обеспечения сопровождения цели и
непрерывный подсвет для полуактивной головки.
Российская ракета средней дальности РВВ-АЕ (рис. 3.2.7) предназначена
для многоканального наведения (применение по нескольким целям с одного
истребителя) и оснащена активной радиолокационной головкой самонаведе-
290
ния, что позволило сделать ее наиболее универсальной по применению, так
как с самолетом после пуска она связана только каналом передачи команд ра-
диокоррекции. Ракета имеет также инерциальную систему управления (ИСУ)
и приемник команд радиокоррекции, позволяющий корректировать данные о
координатах цели.
Габариты и масса ракеты, ее конструкция (крылья малого удлинения и
складывающиеся решетчатые рули) обеспечивают:
• возможность применения на легких самолетах-носителях;
• большой боекомплект на средних и больших самолетах-носителях;
• возможность конформного или внутреннего размещения.
Ракета создавалась главным образом для того, чтобы обеспечить возмож-
ность применения практически с любого самолета, оснащенного средствами
измерения координат цели (радиолокационными или оптическими), причем
отказ от полуактивного наведения позволил при наличии соответствующих
возможностей БРЛС осуществить наведение нескольких ракет на несколько
целей.
Рис. 3.2.7. Ракета РВВ-АЕ
При пуске ракеты с дальности, меньшей полутора дальностей захвата це-
ли, ракета полностью автономна. АРГС выступает здесь в качестве датчика
информации о цели, ИСУ решает задачи системы стабилизации ракеты, инер-
циальной навигации для вычисления текущих координат ракеты, формирова-
ния закона управления на всех этапах наведения, целеуказания АРГС в про-
цессе захвата, вторичной обработки измерений координат цели в процессе
самонаведения.
291
19*
В отличие от ракеты Р-27Р траекторное управление ракетой РВВ-АЕ и
угловое целеуказание головке осуществляются независимо. Данные о коор-
динатах и скорости цели передаются на ракету перед пуском в полетном за-
дании и на траектории по каналу радиокоррекции.
Высокая степень внедрения цифровой вычислительной техники, точные
датчики информации об угловой скорости ракеты и линейном ускорении, со-
вершенные алгоритмы позволили реализовать бесплатформенную инерциаль-
ную навигационную систему, точность которой достаточна для превышения
дальности пуска над дальностью захвата в 4-5 раз.
Существенное усложнение характера измерений координат цели, вызван-
ное необходимостью "запирать" приемник АРГС на время излучения импуль-
са, преодолено в ИСУ при вторичной обработке измерений непрерывным вы-
числением коэффициентов фильтра калмановской структуры в функции те-
кущей точности измерений.
Высокие характеристики АРГС достигнуты благодаря применению:
• щелевой антенны;
• моноимпульсного приемника;
• цифрового панорамного обнаружителя;
• высококачественного двухканального гиростабилизатора с индикаторным
приводом;
• БЦВМ, организующей перед захватом настройку порогов обнаружителя и
компенсацию уходов нулей аналоговых элементов контуров слежения,
формирующей отработку целеуказания по частоте и углу, логику обна-
ружения и совместно с ИСУ - процесс слежения за сигналом цели по час-
тоте и углу.
3.2.3. Применение ракет класса "воздух-воздух"
на истребителе
Информационное взаимодействие
ракетного вооружения с истребителем
При подготовке ракеты к пуску на самолет-носитель передаются разовые
команды, подтверждающие исправность аппаратуры и выход на режим ис-
точников бортового питания.
Информация о захвате цели поступает на борт истребителя от всех ракет,
кроме тех случаев, когда БРЛС мешает головке самонаведения захватывать
цель, как это свойственно РГС непрерывного излучения. Команда "Боевая
кнопка", включающая бортовые источники питания, и команда "Пуск", запус-
кающая двигатель, передаются всем типам ракет.
Без передачи информации, связанной с условиями наведения с борта
самолета, обходились только первые самонаводящиеся ракеты, рассчитанные
на применение в ЗПС цели при пуске по фо. Наиболее совершенной из них
была ракета Р-ЗС, так как ее система управления не требовала данных о высо-
те полета.
292
Стремление облегчить задачу прицеливания самолета привело к появле-
нию целеуказания по углу. Системы стабилизации ракет используют инфор-
мацию о высоте и скорости полета.
Импульсные радиолокационные головки требовали в подвеске передачи с
борта самолета-носителя стробирующих импульсов для запуска систем сле-
жения хвостового и головного приемников.
Обеспечение всеракурсности атаки потребовало информации о скорости
сближения. Не измеряющим ее инфракрасным головкам она нужна для фор-
мирования заданной перегрузки на входе контура стабилизации. Радиолока-
ционными головками непрерывного излучения эта информация используется
в качестве целеуказания.
Появление захвата цели головкой на траектории привело к организации
управления ракетой и головкой по сигналам, переданным на ракету перед
пуском и в процессе ее полета.
В ракете Р-23 ошибка пуска истребителя корректировалась после старта
ее разворотом на заданный угол относительно гиростабилизированной голов-
ки, выставленной в сторону цели, поэтому на ракету с борта самолета-носи-
теля передавался заданный пеленг цели, использовавшийся им при наведении.
Ракетам Р-24 и Р-33 нужны начальные условия по дальности, скорости
сближения и угловой скорости линии визирования для решения в полете
уравнений относительного движения. Жесткие требования по точности этой
информации привели к тому, что к моменту пуска ракеты должен закончиться
переходный процесс на выходе фильтров, обеспечивающих вторичную обра-
ботку на борту истребителя. Это требование оказалось существенно ослаб-
ленным при появлении на ракетах Р-27Р и РВВ-АЕ системы радиокоррекции,
исправляющей данные, введенные в полетном задании перед пуском.
Организация системы радиокоррекции стала возможной после того, как
на самолете-носителе и ракете удалось создать согласованные в пространстве
системы координат, в которых осуществляется обмен информацией о коорди-
натах цели. В передаваемом перед пуском полетном задании ракете сообща-
ется текущее состояние матрицы перехода из связанной ракетной системы в
инерциальную систему координат, выбранную самолетом-носителем. В этой
системе передаются проекции относительной дальности и скорости сближе-
ния, данные о координатах и скорости самолета. По каналу радиокоррекции
на ракету поступают уточненные данные о цели.
Наличие цифровой связи ракеты с истребителем в подвеске и на траекто-
рии позволило передавать ракете данные об особенностях условий пуска: ти-
пе цели, характере траектории, точности информации, наличии разведанных
помех и т.д.
Обобщая сказанное, подчеркнем основные принципы информационного
сопряжения ракеты с бортовым оборудованием самолета.
• Для организации подготовки и очередности пуска ракет на истребителе
формируется временная диаграмма обмена информацией и реализуются
алгоритмы пуска. Информация о состоянии ракет и приближении зоны
разрешенного пуска отображается летчику на индикаторах.
293
• Перед пуском на ракету передаются данные, необходимые для обеспече-
ния работы ее системы управления - - условия полета истребителя и коор-
динаты цели.
• Функционирование ракеты с инерциально-корректируемым участком по-
лета обеспечивается линией радиокоррекции. По этой линии передается
информация, уточняющая параметры движения цели и условия наведения.
• Формирование, передача и прием начальной информации (полетного за-
дания) и команд радиокоррекции после пуска производятся в единой для
самолета и ракеты системе координат.
• Для обеспечения безопасности старта ракеты и парирования возмущений
с борта самолета на ракету поступают заданные значения предваритель-
ного отклонения рулей и уводящих перегрузок.
• Обмен информацией между истребителем и ракетой осуществляется по
трем каналам - цифровому (полетное задание), аналоговому (команды
подготовки и пуска) и высокочастотному (команды радиокоррекции).
Зоны разрешенного пуска и формирование команды "Пуск разрешен"
После проведения подготовки ракеты, контроля ее аппаратуры и форми-
рования команды "Пуск разрешен", т. е. после входа цели в зону разрешенно-
го пуска ЗРП, летчик нажатием боевой кнопки на ручке управления самоле-
том РУС осуществляет пуск ракеты.
Зона разрешенного пуска представляет собой аппроксимацию зоны воз-
можных пусков ЗВП (см. п. 2.1.3), реализованную в БЦВМ системы управле-
ния вооружением истребителя.
Команда "Пуск разрешен" вырабатывается автоматически при нахожде-
нии текущей дальности истребитель-цель D в диапазоне разрешенных даль-
ностей DPmax, DPmin и выдерживании допустимого пространственного пеленга
цели, определяемого отклонением ГСН ракеты, т. е. при выполнении условий
Dptnin — О — Dpmax|,
COS фгл COS фил Сгсн ,
где DPniaxi= DPmax- tcxVc&, - максимальная дальность пуска по неманеврирую-
щей цели; tcx — время схода ракеты; УсбЛ — скорость сближения истребителя с
целью; фгл, фвл - углы пеленга, измеряемые БРЛС или ОЛС. Максимальная
дальность пуска по маневрирующей цели определяется как DPmax2 = Dpmax F •
• (Н, q, югл) - tcxVc6n. Минимальная дальность пуска DPmin характеризует ближ-
нюю границу зоны разрешенного пуска, вычисляемую исходя из времени вы-
бора ракетой ошибки пуска. Максимальная разрешенная дальность пуска
Dpmax рассчитывается в зависимости от максимального полетного времени ра-
кеты и средней скорости сближения ракеты с целью.
Идеальной зоной разрешенного пуска можно считать такую область, ко-
торая полностью совпадает с зоной возможного пуска. Однако обеспечить та-
кое совпадение при реализации ЗРП в алгоритмах боевого применения СУВ
истребителя не представляется возможным; кроме того, параметры движения
294
цели измеряются бортовыми системами с определенными ошибками. В связи
с этим зона разрешенного пуска аппроксимирует ЗВП изнутри с некоторым
запасом, исключающим в реальных информационных условиях формирова-
ние команды "Пуск разрешен" вне зоны возможного пуска. С другой стороны,
уменьшение ЗРП ведет к неполному использованию возможностей ракеты и
всего авиационного комплекса.
Существует два принципиально разных способа алгоритмизации в БЦВМ
зоны разрешенного пуска:
• аналитический расчет аппроксимированной ЗВП в виде зависимости от
параметров движения цели (ее скорости Vu, высоты Нц) и истребителя (V,
Н), а также их относительного состояния (ракурса q, пеленга ф, дальности
D, скорости сближения Vc6jI);
• моделирование полета ракеты к цели после старта в каждый текущий мо-
мент времени.
Достоинства первого способа:
• возможность достаточно простой реализации, не требующей больших ре-
сурсов БЦВМ;
• возможность непрерывного определения ЗРП и ее индикации летчику.
Его недостатки:
• весьма трудно сформулировать зависимости ЗРП от условий атаки, обес-
печивающие приемлемую аппроксимацию ЗВП,
• в алгоритмах расчета дальностей пуска сложно учитывать тип цели и ее
маневр.
Аналитический способ определения на борту зон разрешенного пуска
был реализован в аналоговых вычислителях (счетно-решающих приборах) ис-
требителей 3-го поколения; этот же способ используется в алгоритмах БЦВМ
систем управления вооружением истребителей МиГ-31 и Су-27.
Второй способ основан на упреждающем моделировании на борту истре-
бителя наведения ракеты на цель, осуществляемом с определенным перио-
дом. В результате моделирования рассчитываются конечные условия подлета
ракеты к цели и величина промаха, т. е. нахождение истребителя в зоне воз-
можного пуска. Весьма перспективным и совершенным является сочетание
обоих указанных способов.
В дуэльной ситуации ракетного воздушного боя цель характеризуется
многообразием поведения. Ее маневры направлены, с одной стороны, на со-
кращение ЗВП ракет нашего истребителя, а с другой стороны, способствуют
повышению эффективности применения собственных ракет. Для разрешения
возникающей конфликтной ситуации применяются методы теории игр. Пове-
дение противоборствующих самолетов, определяемое в результате решения
игровой задачи, используется в перспективных системах применения ракет
класса "воздух-воздух" при построении на борту зон разрешенного пуска.
Применение ракет на истребителе обеспечивается представлением летчи-
ку сведений о нахождении цели относительно зоны разрешенного пуска в те-
кущий момент времени. Границы ЗРП отображаются на прицельно-пилотаж-
295
ном индикаторе в виде отметок DPmax, DPmin на шкале дальности. Для этого в
цифровом вычислителе СУВ истребителя реализуются алгоритмы пуска каж-
дого вида применяемой ракеты в зависимости от типа цели, условий атаки
или боя, расчетного поведения цели.
Определение зоны пуска на борту производится после взятия цели на об-
служивание (ибо нет смысла вычислять ЗРП на больших удалениях от нее,
поскольку это приводит к необоснованным потерям процессорного времени).
Степень близости к этой зоне оценивается специальным алгоритмом упро-
щенного представления ЗРП.
Обеспечение режима применения ракет
Аппаратно применение ракет на истребителе обеспечивается бортовой
системой управления вооружением (СУВ) и бортовой системой управления
оружием (СУО).
Алгоритмическое обеспечение СУВ в режиме применения ракет включа-
ет алгоритмы: назначения целей на атаку; расчета ЗРП по каждой атакуемой
цели; формирования разрешения на пуск; вторичной обработки информации;
расчета целеуказания; формирования полетного задания; радиокоррекции;
управления СУ О при подготовке и применении ракет; индикационного обес-
печения применения ракет; управления истребителем для выхода в условия
применения и наведения ракет.
Коротко обозначим функциональное назначение некоторых из указанных
алгоритмов.
Алгоритм назначения целей на атаку формирует приоритетный ряд целей
(массив сопровождения), массив атакуемых целей, номер главной атакуемой
цели, номер обстреливаемой в данный момент цели. Летчик может вручную
назначить цель на атаку, и она становится первой (главной) атакуемой и об-
стреливаемой целью.
Вторичная обработка информации о целях используется для формиро-
вания полетного задания ракете, сигналов радиокоррекции и выведения ис-
требителя в точку пуска ракеты. Координаты целей, назначенных на атаку,
пересчитываются для передачи на ракету в декартову систему координат с
центром в фиксированной на момент пуска точке.
Алгоритм полетного задания формирует плавные и разовые команды в
инерциальную систему управления ракеты в зависимости от условий полета
цели и истребителя, в том числе параметры перехода из связанной системы
координат ракеты в инерциальную систему координат самолета, координаты
истребителя и их производные, относительные координаты цели, предвари-
тельные отклонения рулей ракеты.
С борта самолета-носителя на участке инерциального управления по ка-
налу радиокоррекции передается информация, содержащая текущие коорди-
наты и составляющие вектора скорости цели в инерциальной системе коор-
динат самолета. Алгоритм обеспечивает расчет и кодирование информации
радиокоррекции на этапах подготовки и наведения ракеты на цель.
Управление истребителем при атаке целей обеспечивает его выход в
зону разрешенного пуска и траекторию последующего сближения внутри
296
этой зоны по методу самонаведения с выдерживанием ряда ограничений (см.
подразд. 6.2).
Процессы подготовки и применения оружия можно разделить на две части:
• назначение целей на атаку, выбор ракет для применения, самонаведение
истребителя, расчет зоны разрешенного пуска, выдача команд на пуск ра-
кет и наведение пущенных ракет на цели; все эти задачи решаются в циф-
ровом вычислителе СУВ (в БЦВМ боевого применения);
• непосредственное электрофизическое сопряжение, выдача команд на под-
готовку и пуск ракет; эти процессы выполняются в СУ О во взаимодейст-
вии с бортовым радиоэлектронным оборудованием самолета.
В число задач, решаемых системой управления оружием, входят: выбор
оружия для применения; назначение варианта применения; подготовка ракет
к применению; формирование пусковых команд в соответствии с очередно-
стью разгрузки и ее состоянием.
Система управления оружием при подготовке и пуске выбранных к при-
менению ракет реализует следующие функции:
• в процессе подготовки ракет - выдача питания на ракеты, обеспечение
безопасности отделения, выдача в БЦВМ СУВ информации о состоянии
ракет на точках подвески в ходе управления подготовкой;
• в процессе пуска ракет - формирование команд на тактический или ава-
рийный пуск, выдача в БЦВМ СУВ информации о состоянии ракет на
точках подвески и о протекании процесса пуска.
Управление ракетой осуществляется по двум каналам: по энергетическо-
му каналу производится управление коммутацией питающих напряжений и
формирование силовых команд, обеспечивающих подготовку и пуск ракеты;
по информационному каналу - передача информации, обеспечивающей целе-
указание и нормирование полетного задания.
Действия летчика при применении ракет класса "воздух-воздух"
В режиме применения ракет большой и средней дальности летчик решает
следующие задачи: вход в один из режимов применения; назначение целей на
обслуживание; назначение способа разгрузки ракет; назначение типа обслу-
живаемых целей; выбор момента применения ракет, осуществление пуска и
контроль его реализации; выход из режима применения ракет.
Оценив категорию цели (одиночная или групповая) и ее маневренные
способности, летчик выбирает одноцелевой или многоцелевой режим приме-
нения (для МиГ-31), режим непрерывной пеленгации или режим сопровожде-
ния на проходе (для Су-27).
При назначении целей на обслуживание основным (штатным) является
режим атаки главной цели. К ней алгоритмически присоединяются остальные
цели, которые можно обслужить одновременно. Летчик имеет возможность
переназначить главную цель, атакуемую цель, обстреливаемую цель. Перена-
значает и вводит новую цель летчик одним из способов: по номеру, стробиро-
ванием, по приоритетному ряду.
297
При включении режима применения ракеты назначается способ разгрузки
"одиночно". По результатам анализа информации на индикаторах или в соот-
ветствии с внешними командами летчик может изменить способ разгрузки.
Возможны способы - "одиночно", "серия по 2", "серия по 4", когда сходят со-
ответственно одна, две или четыре ракеты при одном нажатии боевой кнопки
на одну из целей.
Если автоматически назначается средний тип всех целей, то летчик имеет
возможность изменить тип обстреливаемой в данный момент цели.
В соответствии с индикацией зоны разрешенного пуска летчик принимает
решение о моменте применения ракет. После нажатия боевой кнопки на руч-
ке управления самолетом летчик контролирует процесс схода ракеты и в слу-
чае "несхода" производит аварийный пуск или сброс при помощи соответст-
вующих органов на пульте СУ О.
Рис. 3.2.8. Ракета Р-73
После завершения режима применения ракет, получения извне нового за-
дания или изменения тактической обстановки летчик может выйти из этого
режима путем переключения на другой.
Рассмотрим действия летчика при применении ракет малой дальности на
примере использования ракеты Р-73 (рис. 3.2.8) на самолете Су-27. В этом
случае основной задачей прицеливания является наведение поля захвата ГСН
на цель. Такая задача решается автоматически при работе с БРЛС или ОЭПС
либо вручную, путем совмещения с визуально видимой целью прицельной
марки и соответствующего пилотирования самолета. При работе по визуально
видимой цели с применением нашлемной системы целеуказания летчик обес-
печивает целеуказания ОЭПС, БРЛС и ГСН путем совмещения с целью зоны
захвата, отображаемой на отражателе коллиматорного визира на шлеме. По-
сле попадания цели в поле захвата ГСН ракеты происходит автоматический
захват цели и головка переходит на ее автосопровождение. Достижение ис-
требителем зоны разрешенного пуска индицируется летчику загоранием лам-
пы "Пуск разрешен". Команда на пуск ракеты дается летчиком путем нажатия
боевой кнопки.
3.3. Бортовые радиолокационные станции
3.3.1. Развитие бортовой радиолокации истребителей
и перехватчиков
История развития бортовых радиолокационных станций для самолетов-
истребителей в России (СССР) начинается с конца 40-х годов. Первое поколе-
ние БРЛС представляло собой импульсные радиолокационные станции, вы-
полненные на электронных пальчиковых лампах и обеспечивающие перехват
воздушных целей, летящих выше истребителя. Первой была БРЛС "Изумруд"
(главный конструктор Тихомиров В. В.). Коллектив НИИ-17, разработавший
БРЛС "Изумруд", впоследствии был выделен в самостоятельное ОКБ-15, пере-
именованное далее в НИИ приборостроения им. В. В. Тихомирова.
Бортовая РЛС "Изумруд" устанавливалась на самолетах МиГ-15 и
МиГ-17. Она предназначалась для обнаружения и сопровождения воздушных
целей и выдачи целеуказания стрелково-пушечному вооружению истребите-
ля. БРЛС имела две переключаемые антенны (обнаружения и сопровождения
целей), дальность обнаружения ею целей типа Ту-4 составляла 15 км.
Бортовая РЛС "Изумруд-2" для самолета МиГ-17ПФ являлась развитием
БРЛС "Изумруд", имела одну антенну, которая могла последовательно рабо-
тать в режимах обзора, захвата и сопровождения целей. Дальность обнаруже-
ния воздушных целей этой БРЛС возросла вдвое за счет большего диаметра
антенны и большей мощности передатчика. Было несколько модификаций
БРЛС "Изумруд-2". Одна из них (БРЛС "Изумруд-5") на самолете МиГ-17ПФ
предназначалась для выдачи целеуказания ракетам класса "воздух-воздух"
К-5 и наведения их командным методом.
Параллельно в НИИ-17 разрабатывались БРЛС для самолетов типа "Як" и
"Су". В частности, была создана БРЛС "Сокол" (главный конструктор Слепуш-
кин А.Б.) для самолета Як-25, а затем в развитие ее - БРЛС "Орел" для самоле-
та Су-11. Эти БРЛС имели большие размеры антенны и большую мощность
передатчика, что обеспечивало обнаружение цели типа Ту-4 на дальности
35...40 км. БРЛС предназначались для управления стрелково-пушечным воо-
ружением самолета и пуска ракет с тепловыми и полуактивными импульсными
головками самонаведения типа К-40Т и К-40Р. Модификации БРЛС "Орел"
разработки ОКБ-339 (главный конструктор Кунявский Г.М.) были установлены
на самолетах Як-28 и Су-15.
Ко 2-му поколению (1956-1970 гг.) относятся БРЛС с применением по-
лупроводниковых приборов и микроминиатюрных электронных ламп типа
299
"дробь". Эти БРЛС в отличие от 1-го поколения имели меньшие массу и габа-
риты, большие возможности по сопряжению с оружием самолета. Ко 2-му по-
колению относятся БРЛС типа "Алмаз" различных модификаций разработки
НИИ приборостроения (главный конструктор Тихомиров В. В.), осуществ-
ляющих управление ракетами К-7 с полуактивными радиолокационными ГСН,
в частности на самолете Су-9. К этому поколению относятся БРЛС ЦД-30 раз-
работки КБ-1 для Су-9, БРЛС "Сапфир-21" для МиГ-21 и БРЛС "Смерч" для
Ту-128 разработки ОКБ-339 (переименованного в 1962 г. в НИИ радиострое-
ния). Ко второму поколению принадлежат также БРЛС развития линии
"Смерч" НИИ радиостроения (главный конструктор Волков Ф. Ф.): "Смерч-А"
для самолета МиГ-25 и "Тайфун" для новой системы управления вооружением
истребителя Су-15М.
3-е поколение (1970-е годы) составляют импульсные БРЛС, обеспечи-
вающие обнаружение целей, летящих на фоне земли, при атаке истребителем
сверху вниз. Такая задача впервые ставилась в нашей стране, но для ее реше-
ния отсутствовал необходимый научно-технический задел. В качестве основы
решения был выбран метод селекции движущихся целей (СДЦ) с применени-
ем внешней когерентности сигналов, отраженных от земной поверхности и
движущейся цели. В системах с внешней когерентностью опорный сигнал
создается за счет отражений зондирующих импульсов БРЛС от протяженных
местных объектов на поверхности земли. Отраженные сигналы от этих объек-
тов могут на 30...80 дБ превышать уровень внутренних шумов приемника и
маскировать полезный сигнал.
Выделить цель методом СДЦ возможно, когда отраженные сигналы за-
нимают один разрешенный импульсный объем и радиальная скорость цели
такая, что соответствующая ей доплеровская частота не кратна частоте повто-
рения зондирующих импульсов. При кратности таких частот отраженный от
цели сигнал не пульсирует и аппаратурно компенсируется как когерентный
сигнал постоянной амплитуды отражений от местных объектов на поверхно-
сти земли. Неразличимости цели способствуют также нестабильность работы
аппаратуры и внешние причины, связанные с флюктуацией амплитуды и фа-
зы отраженного сигнала.
Для реализации этого решения НИИ радиостроения была задана разра-
ботка БРЛС "Сапфир-23" для самолета МиГ-23 (главный конструктор Куняв-
ский Г. М.). После подключения к этим работам НИИ приборостроения и соз-
дания в 1969 г. НПО "Фазотрон" главным конструктором БРЛС "Сапфир-23"
становится Фигуровский Ю.Н.
Основные трудности в создании режима СДЦ возникли при обеспечении
необходимого уровня шумов передающего устройства и динамического диа-
пазона приемного устройства. Первое приводило к появлению большого чис-
ла ложных отметок цели, а второе загрубляло чувствительность БРЛС, что не
позволяло выделять слабые сигналы цели на фоне мощных сигналов, отра-
женных от земли.
Решение этих задач потребовало концентрации усилий специалистов мно-
гих научных и производственных организаций. К разработке системы "Сап-
фир-23" привлекается группа специалистов НИИ приборостроения во главе с
заместителем Генерального конструктора объединения Гришиным В. К., кото-
рая совместно со специалистами НИИ радиостроения проводит отработку и
300
испытания этой системы. По результатам испытаний доработано большое ко-
личество блоков БРЛС, в том числе передающих и приемных каналов.
В 1976 г. самолет МиГ-23 с системой "Сапфир-23" был принят на вооружение.
БРЛС 3-го поколения с режимом СДЦ выполнены на полупроводниковых
элементах и микромодулях, практически без применения электронных ламп; в
них реализован подсвет цели непрерывным излучением для доплеровских ра-
диолокационных ГСН, обеспечивающих поражение целей, летящих на малых
высотах (ниже истребителя). Кроме того, они сопрягались через системы са-
молета с наземными системами наведения и обеспечивали захват и сопровож-
дение цели по данным наземных АСУ. Это - БРЛС разработки НИИ радио-
строения типа "Сапфир-23" для самолетов МиГ-23 различных модификаций и
"Сапфир-25" для самолета МиГ-25.
К современному, 4-му поколению относятся импульсно-доплеровские
БРЛС, обеспечивающие обнаружение и сопровождение воздушных целей на
фоне земли и в свободном пространстве при атаке целей в переднюю и зад-
нюю полусферы без ограничений по условиям атаки. Элементная база БРЛС
4-го поколения выполнена на микросхемах и микросборках с использованием
бескорпусных полупроводниковых приборов. Широкое применение здесь на-
ходят цифровая вычислительная техника и цифровые линии связи.
На рубеже 70-х годов в ряде капиталистических стран, и в первую оче-
редь в США, начались разработки нового поколения БРЛС с режимом квази-
непрерывного излучения (КНИ) зондирующих импульсов. Этот режим наряду
с увеличением энергии отраженного сигнала за счет накопления ее от пачки
зондирующих импульсов имеет особенности, характерные для импульсно-
доплеровских систем. В этих системах обеспечивается частотная селекция
сигналов, отраженных от цели и подстилающей поверхности.
Импульсно-доплеровские БРЛС по сравнению с импульсными станциями
с режимом СДЦ обладают существенно лучшими характеристиками по обна-
ружению цели на встречных курсах на фоне земли. Для решение таких задач в
режиме КНИ посредством выбора частот повторения зондирующих импуль-
сов выделяется для частотного спектра отраженного сигнала подвижной цели
поддиапазон доплеровских частот, свободный от отражений подстилающей
поверхности. Фактически создаются условия обнаружения цели на фоне соб-
ственных шумов приемника БРЛС.
Импульсно-доплеровские РЛС, как известно, используют метод станций,
работающих на непрерывном излучении. Спектр доплеровского сигнала, от-
раженного от поверхности земли с летящего объекта, представлен на
рис. 3.3.1. На нем значению мощности сигнала S(F;i) в области доплеровской
частоты Рд = 0 соответствуют высотные отражения от точек подстилающей
поверхности вблизи нормали, которая проведена с самолета на землю. Облас-
ти частот F,irjl соответствуют отражению по оси луча антенны РЛС, скользя-
щего по поверхности земли со скоростью перемещения самолета в горизон-
тальной плоскости.
Как видно на рис.3.3.1, при скоростях сближения с целью, больших ско-
рости самолета, отсутствуют сигналы, отраженные от земли, поэтому при
атаке сверху вниз в переднюю полусферу цели отсутствует загрубление чув-
ствительности приемника и дальность обнаружения цели РЛС оказывается
такой же, как и в свободном пространстве.
301
Рис. 3.3.1. Спектр доплеровского сигнала отражения от земли
при непрерывном излучении РЛС
При атаке в заднюю полусферу цели имеет место загрубление чувстви-
тельности приемника за счет сигналов, принимаемых по боковым лепесткам
диаграммы направленности антенны. При этом чем ниже высота полета само-
лета, тем больше загрубление приемника и, следовательно, меньше дальность
обнаружения цели.
Поскольку для РЛС самолета не представляется возможным реализовать
метод непрерывного излучения, так как невозможно разместить две антенны
в носовой части самолета, был предложен импульсно-доплеровский метод с
высокой частотой повторения (ВЧП) излучения зондирующих импульсов.
Этот метод заключается в том, что при атаке в переднюю полусферу цели вы-
бирается частота повторения импульсов Fn , большая чем максимальная доп-
леровская частота цели.
Периодически излучаемые зондирующие когерентные импульсы можно
рассматривать как сумму гармонических составляющих с частотами fk = f0 +
+ kFn, где fo - несущая частота РЛС, а к любое целое число. Каждая состав-
ляющая с частотой fk подобна непрерывному зондирующему сигналу; макси-
мальное и минимальное доплеровское приращение частоты сигналов, отра-
женных от подстилающей поверхности, образуется как 2Vt/7.k и -2V<Ak соот-
ветственно, где ~ c/fk, а с - скорость распространения радиоволн. При этом
Рис. 3.3.2. Спектр доплеровского сигнала отражения от земли
при квазинепрерывном излучении РЛС
302
Рис. 3.3.3. Исключение вертикальной составляющей сигнала отражения от земли
значение мощности доплеровского сигнала отражения от земли по каждой
составляющей модулирируется в соответствии с огибающей спектра зонди-
рующих импульсов ST. В результате этого спектр отраженного от земли доп-
леровского сигнала имеет вид, показанный на рис. 3.3.2.
При атаке с задней полусферы цели применяется метод средней частоты
повторения (СЧП) излучения зондирующих импульсов. При этом анализиру-
ются доплеровские частоты ниже "пика земли" (Едгл). Получается неоднознач-
ное измерение дальности до цели и скорости сближения с ней. Весь интервал
однозначной дальности для выбранного периода повторения зондирующих
импульсов разбивается на равные интервалы ADP, соответствующие разре-
шающей способности РЛС по дальности, и в каждом из них производится
частотный анализ в диапазоне доплеровских частот цели. Иллюстрацией раз-
биения временной оси для "нарезки" интервала однозначного определения
дальности до цели является рис. 3.3.3.
Если исключить определенное количество участков по дальности, соот-
ветствующих высоте полета самолета, при которой загрубление приемника не
обеспечивает необходимую дальность обнаружения цели, то при снижении
самолета дальность, на которой осуществляется прием отражений от земли,
не будет уменьшаться, как и дальность обнаружения цели. При изменении
частоты повторения зондирующих импульсов обеспечивается обнаружение
цели на участках дальности, где были "заперты" приемники РЛС.
Отсутствие в режиме КНИ средней частоты повторения импульсов в доп-
леровском диапазоне частот зон, свободных от отражений подстилающей по-
верхности, осложняет процесс обнаружения цели. Он становится зависимым
от типа подстилающей поверхности. Причем, в силу наличия селекции по
дальности и скорости, режиму КНИ СЧП свойственно собирать фон подсти-
лающей поверхности от отдельных ее участков, которые, естественно, по-
разному отражают зондирующие сигналы БРЛС.
В режиме КНИ СЧП при п неоднозначности по дальности до цели в отра-
женном сигнале от подстилающей поверхности имеется столько же колец равных
дальностей с шириной 0,5сти и расстоянием между ними D = 0,5сТн, где ти и Ти -
длительность и период повторения зондирующих импульсов. Эти кольца пересе-
каются с полосой приема постоянных доплеровских частот (изодоп), по ширине
равной полосе пропускания фильтра в системе селекции цели по скорости ДЕд.
303
Отражения от подстилающей поверхности с площадок пересечения колец
равных дальностей и полос изодоп образуют шумовой сигнал, проникающий
по боковым лепесткам антенны; на его фоне происходит обнаружение в при-
емном канале отраженного сигнала от цели. Количество таких площадок при
неоднозначности по дальности п =3 и неоднозначности по скорости сближе-
ния с целью q=2 иллюстрирует рис. 3.3.4. Предполагается, что самолет летит
на неизменной высоте, начало координат совмещено с самолетом и вектор его
скорости совпадает с осью ОХ0. В зависимости от того, какая подстилающая
поверхность оказывается в этих площадках, имеет место разное отношение
сигнал/шум. Наиболее неблагоприятным оказывается случай, когда на этих
площадках имеются блестящие точки земли. Такими характерными точками
являются крыши домов городов. Спокойному фону отражений от подсти-
лающей поверхности соответствует сухая степь.
Рис. 3.3.4. Прием сигналов отражений от участков подстилающей поверхности
Характерной БРЛС с таким режимом квазинепрерывного излучения ВЧП
является станция прицельной системы AWG-9 (см. [6.5]) американского са-
молета F-14, принятого на вооружение в 1974 г. С антенной в виде плоской
волноводной щелевой антенной решетки диаметром 0,9 м, передатчиком на
лампе бегущей волны со средней выходной мощностью 2,4 кВт и параметри-
ческим усилителем на входе приемника, имеющим коэффициент шума 4,9 дБ,
БРЛС AWG-9 обеспечивала обнаружение цели с эффективной поверхностью
рассеяния = 3 м2 на встречных курсах на фоне земли при дальности до
185 км. Обнаружение цели на максимальной дальности БРЛС AWG-9 осуще-
ствляется с поиском по скорости без измерения значения дальности. Непо-
средственное измерение дальности до цели производится по запаздыванию
импульсной последовательности с линейной частотной модуляцией несущей
частоты. В режиме линейно-частотной модуляции частота зондирующих им-
пульсов равномерно изменяется во времени на интервале такта излучения в
диапазоне нескольких десятков килогерц. Без включения этого режима сме-
щение частоты отраженных импульсов обусловлено лишь радиальной скоро-
стью сближения с целью. При линейно-частотной модуляции формируется до-
полнительное смещение частоты в зависимости от дальности до цели. В этом
случае сравнительно низкая точность измерения дальности до цели (1...2 км)
304
обусловлена принципом практически мгновенного измерения дальности. При
этом снижаются потенциальные характеристики станции и измерение значения
дальности обеспечивается по цели с ЭПР оц = 3 м2 начиная со 150 км.
В БРЛС AWG-9 организован режим сопровождения "на проходе" при
сканировании антенны в азимутальной плоскости ±10, ±20, ±30, ±40 и ±65°
одной, двумя, четырьмя или восемью строками (шириной около 2,5°) по углу
места. N-кратное увеличение обозреваемой зоны по азимуту в градусах по
сравнению с минимальной зоной приблизительно в №’25 раз сокращает мак-
симальную дальность обнаружения цели. В каждой из зон станция AWG-9
может сопровождать до 24 воздушных целей и по шести из них выдавать це-
леуказание для организации одновременного пуска до шести ракет.
Полностью цифровой БРЛС импульсно-доплеровского типа являлась
станция прицельной системы APG-63 самолета F-15. Основные особенности
функционирования БРЛС APG-63:
• использование режима КНИ ВЧП, обеспечивающего в зоне ±30° по ази-
муту и 10° по углу места обнаружение цели с ЭПР о = 3 м2 на встречных
курсах на фоне земли при дальности 80... 100 км;
• реализация режима КНИ средней частоты повторения со сжатием им-
пульсов на базе фазокодовой модуляции, обеспечивающего обнаружение
цели с ЭПР Стц = 3 м2 на встречных и догонных курсах на фоне земли при
дальности 40....50 км;
• организация сопровождения "на проходе" до 10 целей при сканировании
антенны, захват одной из целей и ее сопровождение с непрерывным под-
светом для наведения ракет с полуактивными радиолокационными ГСН;
• введена двухстрочная зона обзора с вертикальным сканированием луча в
пределах -5...+45° вдоль продольной оси самолета для захвата цели по-
средством накренения самолета в ближнем маневренном бою с после-
дующим переходом в режим непрерывной пеленгации цели при угловой
скорости линии визирования до 20 град/с.
В БРЛС APG-63 использовалась такая же антенна, как и в БРЛС AWG-9 с
гидроприводом, обеспечивающим отклонение луча в диапазоне ±60° по ази-
муту и углу места со стабилизацией положения антенны по крену, тангажу и
рысканию. В этой станции установлены передатчик со средней мощностью
1 кВт и приемник с коэффициентом шума 4...6 дБ. Введен цифровой процес-
сор сигналов, выполняющий обработку по алгоритму быстрого преобразова-
ния Фурье и по алгоритмам сжатия сложномодулированных импульсов.
Для измерения дальности обнаруженных целей в ППС и в ЗПС в режиме
КНИ СЧП применялся способ оценки времени задержки отражения зонди-
рующих сигналов. Использование в нем сжатия импульсов с введением фазо-
кодовой модуляции позволяло сузить на порядок длительность импульсов и
при эквивалентной их длительности 1 мкс иметь потенциальную точность из-
мерения дальности —150 м. Однако применение при КНИ СЧП зондирующих
импульсов с частотой повторения -10 кГц обусловливает неоднозначность
определения дальности до цели и в общем случае неоднозначное измерение
ее скорости. Эта неоднозначность разрешается при вобуляции частоты повто-
рения зондирующих импульсов. Осложнение здесь вызывает наличие "пиков
земли" и "альтиметра", в зоны которых не должны попадать стробы селекции
по дальности режима КНИ СЧП.
305
20 - 4094
Благодаря межкадровой обработке информации по обнаруженным целям,
а также введению компенсационного канала приема и системы подавления
мешающих отражений в области доплеровских частот в БРЛС APG-63 обес-
печен низкий уровень ложных тревог при обнаружении цели.
Развитие отечественной радиолокации последней трети XX века шло в
тех же направлениях, что и за рубежом. От конического сканирования луча
при пеленгации целей (60-е годы) был совершен переход к многорежимной
работе с реализацией режима внешней когерентности (70-е годы), режима
внутренней когерентности и цифровой обработки данных (80-е годы) при ра-
боте по воздушным целям. Наращивается и уровень интеграции разрабаты-
вавшихся систем: в 70-х годах радиолокатор комплексируется с теплопелен-
гатором, в 80-х и 90-х годах создаются уже интегрированные радиолокацион-
ные прицельные комплексы и радиолокационные системы управления.
В таблице 3.3.1 приведены некоторые технические характеристики рос-
сийских бортовых РЛС последних лет. Основные российские разработчики
радиолокационных систем для истребителей и перехватчиков - НИИ прибо-
ростроения и НИИ радиостроения - находятся на передовых позициях миро-
вого уровня среди компаний и фирм, работающих в этой области, во многих
случаях являясь лидером в создании СУВ боевых самолетов.
В НИИ приборостроения были разработаны пошедшие в серию РЛС ис-
требителей МиГ-31 и Су-27. Впервые в мировой практике на истребителе
МиГ-31 была установлена ФАР с электронным сканированием луча, что обес-
печило многоцелевой обстрел во всем диапазоне углов сопровождения целей.
При создании БРЛС самолета Су-27 были реализованы: режим средней часто-
ты повторения, измерение дальности до цели в режиме обзора, режим сопро-
вождения "на проходе" воздушных целей. Из последних работ института сле-
дует отметить разработку совместно с Рязанским приборным заводом РЛПК
"Оса" 'с миниатюрной ФАР "Скат-m" для легких фронтовых истребителей и ра-
боты по программе серийного освоения ФАР для истребителя Су-30МКИ.
В НИИ радиостроения (ОАО "Фазотрон-НИИР"), являющемся ведущим
разработчиком бортовых РЛС и систем управления вооружением истребителей
легкого и среднего классов, создано несколько типов бортовой радиолокаци-
онной техники и систем, в том числе РЛС и СУВ С-29 для самолета МиГ-29
(1986 г.), модернизированная СУВ С-29С самолета МиГ-29С (1993 г.). Объеди-
нением "Фазотрон" создано и изготовлено: семейство РЛС "Копье" ("Суперко-
пье", "Москит"), предназначенное для установки на самолеты МиГ-21-93,
МиГ-23-98 и др.; семейство РЛС "Жук", ориентированное на модернизацию
самолетов Су-27, МиГ-29 и др. Кроме того, ведутся работы по новому семейст-
ву РЛС с ФАР для оснащения легких истребителей типа МиГ-21 (РЛС "Фара-
он"), для средних истребителей - РЛС "Сокол-Ф" на основе РЛС "Жук". Разра-
ботка всех этих РЛС позволяет оснастить ими разрабатываемые и модернизи-
руемые самолеты, придавая новые качества и расширяя функции авиационных
комплексов, существенно увеличивая их боевую эффективность.
В современных условиях российские радиолокационные фирмы не поте-
ряли свой научно-технический потенциал и продолжают успешно работать на
внутреннем и международном рынках.
306
307
Технические характеристики российских БРЛС
Таблица 3.3.1
Наименование БРЛС- 8Б Н-001 Н-019 Копье- ИИ Москит-23 Н-019М Топаз Оса Н-010 Жук н-оюм Жук-27 (Жук-М) Сокол
Радиолокационный прицельный комплекс СУВ "Заслон" СУВ С-27 СУВ С-29 СУВ "Копье" СУВ "Москит" СУВ С-29М4 РЛПК "Оса" СУВ С-29С С-27К (С-29УМ) СУВ "Сокол"
Истребитель МиГ-31 Су-27 МиГ-29 МиГ-21-93 МиГ-23-98 МиГ- 29СМТ-1 МиГ- 29УБТ, МиГ-21 МиГ-29С Су-33, Су-27КУБ (МиГ-29СМТ-2) Су-ЗОМК, Су-37
Тип антенны ФАР Кассегрена ЩАР ЩАР ЩАР ФАР ЩАР ЩАР ФАР
Дальность обнаруже- ния целей, км. ППС 180...200 100 70 57 90 90 85 70...80 НО...130 170...180
ЗПС 60...80 40 40 25...30 40 40 40 35...50 40...65 60...80
, м2 19 3 3 5 5 5 5 3 5 5
Зона со- провожде- ния, град. Азимут ±70 ±60 ±60 ±40 ±60 ±70 ±60 ±85 ±85...90 ±70
Угол места -60 + +70 ±60 -45 + +60 ±40 ±60 -40 + +50 ±60 -40 + +55 -40 + +55...60 ±70
Количество сопровож- даемых целей 10 10 10 8 10 10 8 10 10...20 24...30
Число одновременно атакуемых целей 4 1 1 2 2...4 2 4 2 2...4 6...8
Средняя мощность пе- редатчика, Вт 2500 1000 1000 1000 >1000 700 1200 1200...1500 2000
Потребляемая мощ- ность, кВт 31 8,5 8,5 3,6 8,5 12 12
Масса, кг 100...160 100 380 120 250 220...260 245
Надежность, ч / отк. 55 100 120 150 400...550 120 120...200 200
3.3.2. БРЛС перехватчика МиГ-31:
разработка, испытания, принципы
Разработка импульсно-доплеровской БРЛС в составе системы управления
вооружением "Заслон" самолета МиГ-31 в 1968 г. была передана НИИ прибо-
ростроения, который успешно выполнил к этому времени заказ по созданию
зенитно-ракетного комплекса "Куб", проводил глубокую модернизацию его
РЛС, имел опыт работы с системами непрерывного излучения.
Научно-техническое руководство созданием системы "Заслон" осуществ-
лял Гришин В. К.(заместитель генерального конструктора объединения "Фа-
зотрон", затем генеральный конструктор). Решение комплексных вопросов
выполнялось под руководством главного конструктора разработки Федотчен-
ко А. И.
Впервые в стране при разработке БРЛС системы "Заслон" была примене-
на антенна с электронным сканированием луча на базе фазированной антен-
ной решетки (ФАР). Цифровая система обработки информации сигнала и
обмен информацией в системе осуществлялись с применением бортовой циф-
ровой вычислительной машины. Эта БРЛС впитала самые последние дости-
жения отечественной технологии. Дальность обнаружения ею цели типа F-16
в ППС составляет120 км и по цели типа В-1В - 200 км [3.9 - 3.13].
Новизна БРЛС системы "Заслон" состояла в следующем:
• в качестве антенны использована пассивная ФАР с электронным скани-
рованием в обеих плоскостях с углом отклонения луча ±70° по азимуту и
-60°...+70° по углу места;
• реализован режим КНИ высокой частоты повторения импульсов с часто-
той следования порядка 200 кГц;
• введено двухпороговое обнаружение цели (вальдовское различение гипо-
тез), в среднем вдвое сокращающее время ее обнаружения;
• использована комбинированная временная диаграмма обзора пространст-
ва, дискретного сопровождения до 10 целей и непрерывного подсвета до
четырех атакуемых целей;
• по дискретно сопровождаемым целям реализована проводка в зоне про-
зрачности отраженных сигналов цели с точным определением дальности;
• введена моноимпульсная пеленгация в дискретные моменты сопровожде-
ния цели, характеризуемая высокой точностью определения углового по-
ложения цели.
В состав БРЛС системы "Заслон" входят следующие блоки: антенна с
системой электронного отклонения луча (рис. 3.3.5), передающее устройство,
приемное устройство, задающий блок с системой синхронизации, система со-
пряжения с бортовой аппаратурой, цифровая вычислительная система, систе-
ма объективного контроля.
В связи с отсутствием аналогов, технического опыта и необходимостью
первыми решать сложные задачи, в процессе испытаний и при разработке ап-
паратуры выявились недостатки, устранение которых производилось путем
изменения принятых технических решений и изготовления нового варианта
аппаратуры.
308
Основные трудности при разработке фазированной антенной решетки
возникли в обеспечении малого уровня шумов передающих устройств и
большого динамического диапазона приемных устройств, захвата и сопрово-
ждения цели по дальности. В процессе работы менялись и идеи, и конструк-
ция аппаратуры. Было спроектировано, изготовлено и испытано последова-
тельно семь вариантов фазированной
антенной решетки. У лучших изго-
товленных ФАР коэффициент ис-
пользования поверхности антенны
составлял 0,45...0,5 в широкой поло-
се частот при среднем уровне первых
боковых лепестков 23...30 дБ и фоне
42...45 дБ. Были созданы теоретиче-
ские основы построения ФАР и раз-
работаны новые методики их проек-
тирования, составлены программы
расчета ФАР на ЭВМ.
Разработка передающих уст-
ройств производилась с учетом опы-
та, полученного при создании ком-
плекса "Куб", в котором головка са-
монаведения ракеты работала на Рис- 3-3.5. Фазированная антенная решетка
БРЛС "Заслон"
непрерывном излучении и канал
подсвета имел низкий уровень шумов. В отличие от канала подсвета комплек-
са "Куб", передатчик БРЛС должен был работать в импульсном режиме и в
значительно большей полосе несущих частот. Уровень шумов требовался еще
меньший. Проблема состояла в том, что гармоники сигнала, сведенные с час-
тотой повторения импульсов, попадали в доплеровский диапазон приемника
и создавали эффект ложной цели.
Следует отметить, что используемые в передающем устройстве БРЛС
электронно-ламповые приборы не обладали достаточной надежностью. Произ-
водились непрерывные доработки этих приборов и передающего устройства по
устранению выявленных недостатков. В процессе создания БРЛС было разра-
ботано, изготовлено и испытано четыре варианта передающего устройства.
Принципиальной особенностью приемного устройства в импульсно-
доплеровской БРЛС является то, что приемник должен без искажения одно-
временно усиливать слабые сигналы, соответствующие отражению от цели, и
сильные сигналы, отраженные от земли, причем отношение этих сигналов со-
ставляет 108-10|6раз. Для обеспечения этого режима динамический диапазон
приемника должен быть не менее 80 дБ. Отсутствие требуемого динамиче-
ского диапазона приводит к потере чувствительности приемника, в результате
БРЛС "не видит" цель, летящую на малых высотах, особенно малоразмерную.
При разработке аппаратуры было выяснено, что существенные потери
динамического диапазона возникают при просачивании сигнала передатчика
в цепи первого гетеродина приемника, причем загрубление чувствительности
происходит на 30...40 дБ. Эта проблема явилась одной из основных при раз-
309
работке приемного устройства. Много проблем возникало с наличием ложных
сигналов. Устранение этих явлений производилось в основном эксперимен-
тальным путем, что потребовало много сил и времени. Выявленные недостат-
ки в процессе испытаний были в основном устранены в четвертом варианте
приемного устройства, который прошел все испытания и был запущен в се-
рийное производство.
Бортовая вычислительная система в СУВ была построена на использова-
нии одной БЦВМ "Аргон-15", которая также решала все задачи БРЛС. НИИ
приборостроения разработал сопряжение с БЦВМ, все линии связи с борто-
выми системами были цифровыми. Уникальность разработки, отсутствие не-
обходимых знаний и методик приводили к возникновению ошибок, наложе-
нию сигналов различных уровней.
В ГосНИИАС в радиобезэховой камере с затуханием переотражений от
стен не менее 40 дБ был установлен действующий комплект БРЛС и сопря-
женный с ее задающим блоком частот штатный имитатор отраженного сигна-
ла от цели "Укроп". Установка БРЛС на подвижном основании и рупора ими-
татора на подвижной каретке "дороги" на расстоянии друг от друга более 25 м
обусловило благоприятные условия физического моделирования процессов
функционирования системы.
Создание в радиобезэховой камере на базе универсальной ЭВМ системы
относительного перемещения цели и истребителя, управление с ее помощью
подвижным рупором и трехстепенным стендом с расположенными на нем
блоками БРЛС определило облик комплекса полунатурного моделирования
(КПМ) системы "Заслон". С помощью КПМ стало возможным имитировать
весь этап полета самолета с включенной БРЛС от обнаружения цели до при-
менения по ней оружия. Это позволило проводить как предполетное, так и
послеполетное моделирование для анализа результатов летных испытаний.
Более того, получение хорошей сходимости результатов летных испытаний с
материалами полунатурного моделирования радиолокационных процессов
определило возможность замены части натурных работ испытанием аппара-
туры на КПМ.
Практически полностью с помощью КПМ "закрывались" работы по оцен-
ке помехозащищенности БРЛС. Одновременно с проведением оценочных ра-
бот создавались и отрабатывались элементы помехозащиты БРЛС нового по-
коления. Наиболее сложные работы этого плана были связаны с введением
в БРЛС компенсационного канала, обеспечивающего сопровождение цели в
условиях действия мощных не совмещенных с целью помех. К началу прове-
дения таких работ была создана и отлажена специальная аппаратура форми-
рования помех и решены методические вопросы оценки помехозащищенно-
сти БРЛС.
Отработка системы в целом производилась комплексными подразделе-
ниями НИИ приборостроения с участием представителей ГосНИИАС и раз-
работчиков аппаратуры. Порядок разработки в основном соблюдался по все-
му технологическому циклу: настраивались и сдавались заказчику блоки
БРЛС, затем настраивались системы, далее они моделировались в НИИ при-
боростроения и затем в ГосНИИАС, отработка производилась на летающих
лабораториях и боевых самолетах.
310
Для испытаний аппаратуры системы "Заслон" были использованы две ле-
тающие лаборатории на базе самолетов Ту-104, разработанные НПО "Взлет".
На первой из них решались чисто радиотехнические задачи: отработка управ-
ления ФАР, процессов поиска и обнаружения целей. Летные испытания аппа-
ратуры на первой летающей лаборатории начались весной 1973 г. Вторая ле-
тающая лаборатория начала полеты осенью 1975 г. Она была сориентирована
на испытания в целом системы "Заслон", хотя на первых порах тоже отраба-
тывались радиотехнические вопросы, в частности вопросы захвата цели и
дискретного ее сопровождения. На последующих этапах проводилась отра-
ботка сопряжения БРЛС системы "Заслон" с подвешиваемыми под крылом
самолета ракетами. На летающих лабораториях была произведена отработка
БРЛС в летных условиях, включая пуски ракет. Несмотря на это, аппаратура,
установленная на боевых самолетах, оказалась неработоспособной. Как потом
было выяснено, большое значение имело размещение аппаратуры на борту.
Первые полеты самолета МиГ-31 с БРЛС системы "Заслон" были выпол-
нены в 1976 г., а в начале 1978 г. был совершен полет с обнаружением и со-
провождением 10 целей. Проведение летных испытаний БРЛС системы "За-
слон" проходило очень сложно. Требовалось переоборудование полигона в
г. Ахтубинске с тем, чтобы на встречных курсах цели и истребителя даль-
ность начального их вывода составляла более 200 км. Устанавливалась новая
телеметрическая аппаратура внешнетраекторных измерений положения
сближающихся объектов. Существенны были вопросы обеспечения безопас-
ности от столкновения, поскольку оценивались также характеристики сопро-
вождения цели на минимальной дальности, и пролеты цели относительно но-
сителя составляли около 1 км.
Большие трудности при проведении летных испытаний БРЛС были свя-
заны с оценкой ее тактико-технических характеристик в многоцелевой обста-
новке. Навстречу истребителю двигалось несколько целей, выдерживающих
между собой определенные расстояния. Эти расстояния должны были быть
такими, чтобы цели не выходили из зоны обзора БРЛС, особенно наклонен-
ной вниз при маловысотном полете целей. Такие полеты, как правило, выпол-
нялись комбинированными, т.е. с совмещением многих задач по оценке ха-
рактеристик БРЛС.
В конце 1980 г. были закончены Государственные совместные испытания
самолета МиГ-31. Принятый в 1981 г. на вооружение самолет МиГ-31 с БРЛС
системы "Заслон" спустя многие годы не имеет себе аналогов в отечественной
и зарубежной авиации.
3.3.3. БРЛС истребителя Су-27:
создание, отработка, характеристики
В 1976 г. государственными органами было принято решение о создании
самолета Су-27, имеющего БРЛС, не уступающую по тактико-техническим ха-
рактеристикам станции прицельной системы APG-63 самолета F-15. Почти все
отмеченные выше особенности БРЛС APG-63 вошли в техническое задание на
разработку БРЛС самолета Су-27; кроме того, были заданы дополнительные
311
функции, реализация которых обеспечивала превосходство над прототипом.
Эти функции определялись техническим заданием разработки нового типа ан-
тенны, работающей как щелевая антенная решетка в горизонтальной плоскости
и как фазированная антенная решетка в вертикальной плоскости.
Электронное перемещение луча в вертикальной плоскости позволяло в
режиме обзора при горизонтальном механическом сканировании луча прак-
тически мгновенно направлять его на ранее обнаруженные цели. Это обеспе-
чивало при многострочном обзоре регулярное, в 2-3 раза более частое, чем
только механическое, сканирование, а также обращение антенны к ранее об-
наруженным целям. Радикально решался вопрос повышения точности про-
гнозирования положения цели в режиме сопровождения "на проходе" (СнП).
Значительное повышение точности режима СнП БРЛС самолета Су-27 по
сравнению с механическим перемещением луча станции APG-63 позволяло
рассматривать вопрос многоцелевого обстрела, что в то время было неосуще-
ствимым для самолета F-15 при использовании ракет с полуактивными ра-
диолокационными головками самонаведения. На дальностях захвата головок
этих ракет требуется дискретно-непрерывный подсвет целей, что в БРЛС, в
частности самолета МиГ-31, обеспечивается последовательным электронным
"перебросом" луча с одной цели на другую в зависимости от прогнозируемой
дальности подлета к ним ракет.
В БРЛС самолета Су-27 решение задачи подсвета целей предполагалось
выполнять посредством поворота антенны с удержанием ее луча на цели в те-
чение интервала подсвета на такой угол, чтобы последующее перемещение
луча на другую цель могло осуществляться электронным способом. В этом
случае по функциям обстрела целей обеспечивалось приближение БРЛС са-
молета Су-27 к БРЛС системы “Заслон” с реализацией, по крайней мере,
двухцелевого обстрела.
В целях дальнейшего развития истребительной авиации одновременно
была задана разработка самолета МиГ-29 как легкого истребителя ВВС. Соз-
дание системы управления вооружением самолета Су-27 (С-27) было поруче-
но НИИ приборостроения, а разработка СУВ С-29 - НИИ радиостроения.
В результате предварительной проработки технических требований было
установлено, что возможна унификация основных блоков этих систем, а это
может дать выигрыш при разработке и серийном производстве изделий. Со-
ответствующие работы были поделены между институтами. НИИ приборо-
строения разрабатывал блоки: задающего устройства передатчика, устройства
ввода и вывода, сопряжения с ракетами, БЦВМ, цифровых датчиков вал-код,
бортовой части системы объективного контроля. НИИ радиостроения пору-
чалась разработка элементов системы: высокочастотного и низкочастотного
приемников, выходной ступени передатчика, наземной части объективного
контроля, системы встроенного контроля. Остальные необходимые блоки ка-
ждое предприятие разрабатывало самостоятельно. Главным конструктором
унифицированной системы был назначен генеральный директор и генераль-
ный конструктор объединения "Фазотрон" Гришин В. К., главным конструк-
тором СУВ С-27 - Бекирбаев Т.О., а главным конструктором СУВ С-29 -
Кирпичев Ю. П.
312
При разработке унифицированной системы использовался опыт создания
БРЛС системы "Заслон". В целях устранения недостатков, имевших место в
этой системе, были приняты принципиально новые технические решения,
особенно по разработке передающего устройства, системы синхронизации и
управления. В соответствии с техническим заданием в систему вводились но-
вые режимы, ранее не применявшиеся в системе "Заслон".
Главным условием разработки было время: работа должна была быть за-
кончена через 2,5 года после ее начала. Обшими усилиями двух институтов
был создан коллектив, способный выполнить эту работу. Между подразделе-
ниями институтов была распределена разработка отдельных устройств, при-
годных для обеих систем. Их оказалось около 70% от общего объема аппара-
туры. Программное обеспечение создавал для себя каждый институт. Коллек-
тивы работали дружно, и разработка аппаратуры была завершена в
установленные сроки. И хотя при проведении летных испытаний были полу-
чены положительные результаты, из-за серьезных недостатков, выявленных в
процессе проведения работ, дальнейшие испытания были прекращены.
Основные недостатки заключались в следующем:
• БЦВМ разработки НИИ приборостроения оказалась неработоспособной;
• большие отставания в создании программного обеспечения БЦВМ;
• антенна с электронным сканированием в одной плоскости не соответст-
вовала техническим требованиям.
В 1982 г. после рассмотрения состояния дел в ЦК КПСС Гришин В. К.
был освобожден от занимаемой должности и назначен главным конструкто-
ром СУВ С-27, а Бекирбаев Т. О. - его заместителем. Приказом министра ра-
диопромышленности была создана экспертная комиссия по рассмотрению дел
по СУВ С-27, которая приняла решение:
• разработку антенны прекратить и вместо нее поставить новую, на базе
антенны БРЛС С-29, поручив разработку антенны НИИ радиостроения;
• БЦВМ разработки НИИ приборостроения заменить на БЦВМ Ц-100 раз-
работки НИЦЭВТ.
В БРЛС С-29 использовалась двухзеркальная антенна Кассегрена. Для
БРЛС С-27 (рис. 3.3.6) нужна была антенна большего размера. Увеличение ее
диаметра в полтора раза по сравнению с антенной БРЛС С-29 потребовало
усиления прочности конструкции. Разработку этой антенны в короткие сроки
провел коллектив НИИ радиостроения.
Было принято также решение для БРЛС С-27 использовать БЦВМ с дол-
говременным запоминающим устройством, имеющим вдвое больший объем
памяти, чем в БРЛС С-29. Это открывало возможности по дальнейшему со-
вершенствованию математического обеспечения БРЛС.
Отмеченные проблемы вместе с другими задачами системы С-27 потре-
бовали серьезных доработок математического обеспечения БЦВМ. В марте
1983 г. было получено заключение о готовности системы С-27 к проведению
летных испытаний. После отладки аппаратуры С-27 на серийных самолетах
Су-27 начался этап летно-конструкторских испытаний. Одной из первосте-
пенных задач было подтверждение заявленных потенциальных характеристик
313
БРЛС. В режиме ВПЧ средняя дальность обнаружения цели с ЭПР о = 3 м2 по
критерию "два из пяти" с вероятностью 0,5 составила 100 км.
Существенной особенностью режимов квазинепрерывного излучения,
проявившейся при проведении летных испытаний, является наличие "слепых"
ракурсов цели при смене полусферы ее наблюдения. В свободном простран-
стве при углах визирования цели ев > 3° над горизонтальной плоскостью сме-
на полусферы цели связана с наличием "слепой" зоны шириной несколько
градусов в районе ракурса цели q = 90°. Такая зона не вызывает трудностей и
легко преодолевается при инерционном сопровождении цели. Другая картина
наблюдается при вертикальном угле визирования цели £в< 3°, когда при смене
полусферы атаки, как правило, захватывается "пик земли". Для исключения
захвата "пика земли" при ракурсе цели в диапазоне углов ~ 85... 105° ее со-
провождают инерционно.
Рис. 3.3.6. Бортовая РЛС истребителя Су-27
Существуют разные тактические приемы компенсации срыва последую-
щего сопровождения БРЛС цели при принудительном ее переходе на инерци-
онное сопровождение. Вместе с тем известны способы обеспечения работы
БРЛС в диапазоне углов "слепых" ракурсов цели. В ТТЗ на самолет Су-27 за-
давалась всеракурсность атаки цели. Это определяло необходимость проведе-
ния доработок БРЛС для обеспечения такого требования. Значительного объ-
ема отработки на комплексе полунатурного моделирования ГосНИИАС тре-
бовали также вводимые на этом этапе элементы помехозащиты БРЛС. На
КИМ имитировался почти весь заданный перечень радиолокационных помех.
Причем, поскольку проводилось траекторное управление истребителем и це-
лью, постановка помех могла совмещаться с маневрированием цели и пре-
одолением, в частности, "слепых" ракурсов БРЛС. Были проверены все режи-
мы функционирования БРЛС, включая ее помехозащищенность. Имитирова-
лись следующие виды помех: широкополосные шумовые совмещенные и
314
вынесенные с эквивалентной плотностью интенсивности излучения до не-
скольких киловатт на мегагерц, многоточечные шумовые помехи, включая
мерцающие, прицельные узкополосные типа доплеровского шума, импульс-
ные помехи различной последовательности, имитационные помехи типа уво-
да по скорости цели, комбинированные (различное сочетание видов помех).
Значительное внимание уделялось обратным переходам при постановке
прерывистых помех, когда БРЛС при низкой частоте включения помех необ-
ходимо переходить то на сопровождение "чистой" цели, то на совмещенную с
ней шумовую помеху. Временные задержки с переключением таких режимов
БРЛС при интенсивном маневрировании цели приводят к значительным ди-
намическим ошибкам ее сопровождения. В процессе проведения таких работ
были найдены эффективные решения повышения помехозащищенности
БРЛС.
В начале 1984 г. завершены летно-конструкторские испытания самолетов
Су-27; последовавшие за этим совместные летные испытания были успешно
проведены за два месяца. По окончании этих испытаний в математическом
обеспечении системы С-27 были учтены обнаруженные недостатки. В 1985 г.
самолет Су-27 с этой доработанной редакцией математического обеспечения
системы С-27 принимается на вооружение страны. В конце 1983 г. заверши-
лись также совместные испытания самолета МиГ-29 с СУВ С-29. Следует от-
метить, что при создании обоих самолетов удалось сохранить облик унифи-
цированной системы.
3.4. Системы управления вооружением
Бортовое радиоэлектронное оборудование самолетов МиГ-31 и Су-27
состоит из ряда сложных функциональных систем, во взаимодействии осуще-
ствляющих решение задач боевого применения и управления всеми видами
вооружения. Центральным элементом бортового комплекса истребителей-
перехватчиков ПВО является система управления вооружением (СУВ). Далее
описываются состав и решаемые задачи систем управления вооружением
РП-31 "Заслон" перехватчика МиГ-31 и С-27 истребителя Су-27. Общие ха-
рактеристики этих СУВ и вооружения самолетов, а также данные по специ-
альному оборудованию и боевым задачам приведены в табл. 3.4.1.
3.4.1. Состав и описание бортовой СУВ
"Заслон” перехватчика МиГ-31
Система управления вооружением самолета МиГ-31 (система "Заслон")
включает (рис. 3.4.1) обзорно-прицельную систему, систему управления ору-
жием, блоки сопряжения с вооружением.
Система "Заслон" сопрягается с основным радиоэлектронным оборудова-
нием самолета:
• системой автоматического управления;
• навигационным комплексом;
• бортовой частью аппаратуры наземной АСУ;
• аппаратурой системы государственного опознавания (ГО) с включением в
состав системы "Заслон" блока запросчика ГО;
• аппаратурой межсамолетной телекодовой связи и передачи данных на
землю.
Обзорно-прицельная система, в свою очередь, включает:
• радиолокационный канал на базе БРЛС;
• тепловой канал в составе обзорно-следящего теплопеленгатора;
• цифровую вычислительную систему;
• систему индикации;
• пульты управления.
В системе "Заслон" впервые в мире для самолетных БРЛС дальнего дей-
ствия применена трехканальная (радиолокационный канал, канал подсвета и
канал системы определения госпринадлежности) антенная система в виде мо-
ноблочной фазированной решетки с быстрой электронной перестройкой по-
ложения луча в пространстве и цифровое устройство узкополосной доплеров-
ской фильтрации.
316
Впервые на борту отечественного истребителя в составе СУВ "Заслон"
реализованы импульсно-доплеровская обработка сигналов, дискретно-непре-
рывный подсвет, индикатор тактической обстановки, бортовая цифровая вы-
числительная система.
Характеристики систем управления вооружением
и вооружения истребителей МиГ-31 и Су-27
Таблица 3.4.1
Тип самолета МиГ-31 Су-27
Наименование СУВ РП-31 "Заслон" С-27
Основные боевые задачи Перехват при командном наведении Б АСУ "Луч", "Воздух-1М", АК РЛДН "Шмель”
при полу автономных действиях Б АСУ "Луч", "Воздух-1 М" при БН и БП
при групповых действиях С использованием ИТО и АПД С использованием ИТОиТКС
Сопровождение за линией фронта Не задано С использованием ИТОиТКС
Дальний ракетный бой На больших и средних дистанциях с сохране- нием обзора после пуска ракет с РГС с использованием РЭП
Ближний маневренный воздушный бон Не задано С аппаратурным и апгорит мическим обеспечением
Атака наземных цепей В условиях визуаль- ной видимости цепи
Диапазон параметров полета перехватываемых целей Высота Нц. км: максимальная минимальная 30 0,05 27 0,03
Скорость Уд1пи, км/ч 3700 3500
Число одновременно обстреливаемых целей 4 2
Автоматизация пилотирования на боевых режимах Автоьяпнестое и дтрас- тсрноеутрт,патпг от САУ-155МП с ЦВГУ Автомтпнесите, дграс- торнэе и коабироваих уцжиие от САУ-27сЦВ1У
Вооружение РБД Количество и наименование 4-р-ЗЗ —
Дальности пуска ППС/ЗПС, км 120 / 40
РСД Количество и наименование 2ХР-40Д 4*Р-27Э
Дапьноспт пуска ППС/ЗПС, км 40/20 70 / 43
РМД Количество и наименование 4-Р-бО 6-Р-73
Дальности пуска ППС/ЗПС, км / 8 9/ 12
спв Наименование ГШ-23-6 ГШ-301
Калибр, мм /число снарядов 23 / 260 30 / 150
Характеристики СУВ РЛС Антенна Фазированная решетка Кассегрена
Дальность обнару- жения (сд=3м2), км ппс 120..130 85...1OO
ЗПС 45...60 30...40
Число сопровождаемых цепей 10 10
Зона сопрово- ждал я цепей, трэд по азимуту ±70 ±60
гюутумесга +70...-60 ±60
ТП.ОЛС Наименование 8ТК 36Ш
Дапихть ойтржня Л171 ПК’. км 40/- 50/15
Индикация ПШ1-70В, ИТО-Л, ИТО КАП "Нарцисс", ИТО
БЦВМ "Аргон-15” СЦЕН: Ц-100 СЦВ-2: Ц-100
Комплекс СВЯЗИ "Земля-борт” "Радуга-Борт МБ"5У15К БАН "Спектр" 11Г6
"Борт-борт" АПД-518 ТКС-2-27
Комплекс обороны Станция предупреждения об излучении "Береза МЛ" "Береза МП"
Станция активных помех — "Сорбция-С"
Устройство сброса пассивных помех АПП-50 АПП-50
317
Принципы построения БРЛС системы "Заслон", история ее разработки и
испытаний освещены в п, 3.3.2. Здесь приведем некоторые технические пара-
метры БРЛС 8Б [3.2]:
Зона обзора (угол места / азимут), град:
за 5,5 с................................................... 5/45
за 8,7 с.................................................... 20/90
Возможные перемещения центра зоны обзора, град.................. +35
Зона сопровождения - полуконус с углом при вершине, град:
в верхней полусфере ........................................ 140
в нижней полусфере........................................... 130
Время перемещения луча из данной позиции в любую другую, мс.. » 1,3
Динамический диапазон приемника, дБ............................. 80
Ширина диаграммы направленности антенны, град:.................. 2,5
Средняя мощность передатчика радиолокационного сигнала, кВт.. 2,5
Мощность непрерывного излучения передатчика подсвета, кВт.... 2,0
Коэффициент приемника, дБ....................................... 5,5
Диаметр антенны, мм............................................ 1100
Потребляемая мощность питания, кВт
переменного тока 400 Гц, 200 В............................... 31
постоянного тока 27 В....................................... 2
Рис. 3.4.1. Структурная схема системы управления вооружением "Заслон"
Работу и реализацию функциональных возможностей БРЛС обеспечивает
БЦВМ. На нее возлагаются задачи организации работы БРЛС, управления ап-
паратурой и обработки радиолокационной информации. БЦВМ решает также
и другие задачи СУВ.
318
Цифровая вычислительная система СУВ "Заслон"
Входящая в СУВ бортовая ЦВМ составляет вместе с расширенными уст-
ройствами ввода и вывода информации бортовую специализированную цифро-
вую вычислительную систему. С помощью БЦВС решаются задачи радиолока-
ционного канала СУВ и все задачи, требующие выполнения численных расче-
тов и формирования высокоточного управления.
В задачах радиолокационного канала БЦВС на каждом такте перемеще-
ния луча БРЛС производит расчет управления фазированной антенной решет-
кой, расстановку стробов приемных устройств, формирование сетки частот
для проведения спектрального анализа принимаемых сигналов, организует
прием данных блока цифрового обнаружения и выполняет вторичную обра-
ботку информации. БЦВС обеспечивает также общую диспетчеризацию рабо-
ты устройств БРЛС, формирует управление в каналах дальнометрирования и
углового сопровождения цели.
БЦВС сопрягается с блоком обработки информации обзорно-следящего
теплопеленгатора и обеспечивает: выдачу целеуказания головкам самонаве-
дения ракет, управление истребителем, организацию групповых действий са-
молетов, отображение пилотажно-прицельной, обзорной и тактической ин-
формации на экранах системы индикации.
Система связей БЦВС с абонентами бортовой радиоэлектронной аппара-
туры принята радиального типа по каналам связи с тестированными видом и
уровнем передаваемых по ним электрических сигналов. Связь БЦВС с блока-
ми подсистемы (с цифровыми обнаружителями сигналов, с пультами управ-
ления, с индикацией и т. д.) определяется высокой частотой решения задач
внутри подсистемы, большими потоками информации, требованием мини-
мального времени реакции на запрос обслуживания любого блока подсисте-
мы. Это обусловливает введение в подсистемах СУВ унифицированной циф-
ровой параллельной магистрали, управление которой осуществляет БЦВС, а
блоки подсистемы подключаются к магистрали через устройства сопряжения
по инициативе БЦВС.
Блоки аналоговых устройств в составе подсистем СУВ преобразуют
управляющие сигналы в аналоговую форму и наоборот. Поэтому наряду с па-
раллельной магистралью БЦВС в состав ее устройств ввода и вывода инфор-
мации входят также аналого-цифровые и цифроаналоговые преобразователи.
В качестве базового цифрового вычислителя в БЦВС используется БЦВМ
"Аргон-15". Эта БЦВМ характеризуется следующими данными:
Эффективная производительность, тыс. опер/с................. ~ 100
Оперативное запоминающее устройство. Кбайт................... 4
Постоянное запоминающее устройство. Кбайт................... 72
Возможность оперативных доработок программ посредством
перепрошивки ферромагнитных колец устройств
долговременной памяти;
Наличие параллельных и последовательных каналов обмена;
Время наработки на отказ, ч................................ 500
Масса, кг................................................ 53
Потребляемая мощность, Вт.................................. 250
319
Система индикации СУВ "Заслон"
Система индикации СУВ включает: прицельно-пилотажный индикатор
(ППИ-70В); малый индикатор тактической обстановки (ИТО-1), устанавли-
ваемый в кабине летчика-пилота; большой индикатор тактической обстановки
(ИТО-2), устанавливаемый в кабине летчика-оператора; обзорный сдвоенный
индикатор радиолокационного и теплового каналов; электронный блок; блок
электропитания.
Электронно-оптический индикатор ППИ-70В формирует информацию в
буквенно-цифровом и графическом виде на экране электронно-лучевой труб-
ки с последующим переносом этого изображения на полупрозрачный отража-
тель посредством коллиматорной системы. Этот индикатор выполнен на про-
екционной трубке с высокой яркостью для обеспечения работы без примене-
ния тубуса при прямом освещении солнца.
Электронные индикаторы прямого видения ИТО-1 и ИТО-2 отображают
информацию в буквенно-цифровом и графическом виде с большим количест-
вом символов. Устройство ИТО-1 отличается от ИТО-2 значительно меньши-
ми размерами, сокращенным объемом отображаемой информации и дополни-
тельным усилителем подсвета изображения с датчиком освещенности для
обеспечения работы в незатененной кабине летчика-пилота.
В кабине штурмана-оператора разме-
щается сдвоенный обзорный индикатор,
блок формирования луча каждого из экра-
нов которого сопрягается непосредствен-
но с выходными приемными устройства-
ми БРЛС и теплопеленгатора. Частота по-
вторения информации на экранах
индикации 50 Гц, что обеспечивает нор-
мальное восприятие летчиком информа-
ции с экранов индикаторов.
Электронный блок системы индика-
ции выполняет функции: сопряжения с
информационной магистралью СУВ, за-
писи, хранения и регенерирования симво-
лов ППИ, ИТО-1 и ИТО-2, записи, хране-
ния и регенерирования обзорной инфор-
мации с имитацией послесвечения
отметки цели с заданным временем.
Блок электропитания обеспечивает
формирование всей сети напряжений, не-
обходимых для работы системы индика-
Кабина штурмана-оператора МиГ-31 ции, включая высоковольтное питание
электронно-лучевых трубок.
Индикаторы тактической обстановки являются знакографическими быстро-
действующими индикаторами разработки НИИП с использованием специаль-
ной электронно-лучевой трубки, которая имеет оптическое окно, позволяющее
фотографировать изображение с обратной стороны экрана, не мешая наблюде-
нию. При модернизации системы "Заслон" применена цветная вибростойкая
трубка, обеспечивающая наблюдение информации даже при засветке солнцем.
320
Обзорно-следящий теплопеленгатор
В состав СУВ "Заслон" входит обзорно-следящий теплопеленгатор с обо-
значением 8ТК. Разработка 8ТК была задана ЦКБ "Геофизика" (главный кон-
структор Хорол Д. М.) в 1970 г. Основное назначение теплопеленгатора 8ТК -
обеспечение скрытности атаки истребителя в ЗПС перехватываемой цели.
Предполагалось, что при выводе истребителя МиГ-31 наземной АСУ в ЗПС
цели теплопеленгатор 8ТК обнаруживает цель по инфракрасному излучению
факела двигателя и организует ее сопровождение с точностью, достаточной
для применения по ней ракет с ТГС.
В технических требованиях на теплопеленгатор 8ТК задавалось его ис-
пользование только на большой высоте полета самолета МиГ-31, что опреде-
лило конструкцию в виде тубуса, выдвигаемого в нижней части фюзеляжа
самолета. Вращающийся в одну сторону барабан с системой зеркал обеспечи-
вает фокусирование теплового изображения в точке на его оси, в которой
размещается чувствительное приемное устройство теплопеленгатора, охлаж-
даемое до температуры жидкого азота.
Это приемное устройство представляет собой линейку из чувствительных
элементов, обеспечивающих при постоянном наклоне вращающегося в азиму-
тальной плоскости объектива обзор по углу места около 6°. Вращение объекти-
ва создает обзор в азимутальной плоскости в секторе 120°. Изменение наклона
объектива дает возможность формировать другие 6° строчки обзора по углу
места, что в целом обеспечивает прием информации в полном поле обзора.
В этом поле обзора в зависимости от режима работы СУВ формируется
большая или малая зона обзора. Центр устанавливается по целеуказанию
БРЛС, наземной АСУ либо летчиком-оператором посредством перемещения с
помощью кнюппеля метки центра зоны обзора по экрану обзорного индикато-
ра. При ведущем радиолокационном канале СУВ выдает целеуказание тепло-
пеленгатору 8ТК по сопровождаемой БРЛС цели; формируется зона ±3 х ±3°
относительно линии визирования этой цели. Аналогично формируется малая
зона по выделенной оператором цели при ведущем тепловом канале СУВ.
В случае назначения атаки по выделенной цели теплопеленгатор захваты-
вает обнаруженную цель, ближайшую к центру малой зоны обзора; организу-
ется режим автосопровождения цели с постоянной выдачей ее угловой ин-
формации в СУВ. Средняя дальность обнаружения типового истребителя в
ЗПС при работе его двигателя в режиме "Максимал" составляет ~ 40 км.
Из основных технических данных теплопеленгатора 8ТК отметим сле-
дующие [3.2]:
Зона обзора (азимут / угол места), град:
за время 0,25 с............................... 6/6
за время 0,9 с............................. 30/13
Зона сопровождения, град:
по азимуту.................................... 120
по углу места.................................. 40
Разрешающая способность по углам, угл. мин.... 15
Потребляемая мощность, кВт ..................... 1,3
Наработка на отказ, ч .......................... 350
Масса, кг....................................... 124
21 - 4094
321
В 1977 г. опытные образцы теплопеленгатора 8ТК поступили на стендовые
и летные испытания. На стенде отрабатывалась динамика сопровождения цели
и помехозащищенность ВТК. в частности, обеспечение выделения в группе од-
ной атакуемой цели при различных фоновых ограничениях. По материалам ис-
пытаний проводились доработки программного обеспечения и внедрялись
предложения по усовершенствованию аппаратуры. В конце 1980 г. был выпол-
нен весь объем испытаний по теплопеленгатору 8ТК, и в следующем году он в
составе аппаратуры самолета МиГ-31 принят на вооружение.
Связь СУВ с оружием
Блок связи и контроля, входящий в состав СУВ, формирует необходимые
сигналы и команды в соответствии с временным [ рафиком подготовки к пус-
ку ракет. Непосредственно подготовка ракет к пуску и их пуск выполняются
системой управления оружием (СУО).
В состав СУО входят: блоки логики и автоматики, индикатор подвесок,
пульт управления подготовкой и применением ракет, щиток наземной подго-
товки.
СУО обеспечивает:
• выдачу в СУВ сигналов о типе, количестве и месте подвешиваемого ору-
жия;
• установку вариантов и режимов применения оружия на земле с возмож-
ностью переключения их в воздухе;
• выдачу на индикацию сигналов о выбранном оружии, его состоянии, о
расходе и остатке боекомплекта;
• автоматическое переключение при "несходе" ракет с любой точки под-
вески на применение других ракет того же типа, готовых к пуску.
В системе "Заслон" выбор типа ракет производит летчик-оператор по-
средством перевода соответствующего переключателя на пульте управления.
Для применения оружия в кабине летчика-пилота на ручке управления само-
лета установлена боевая кнопка "Пуск" и имеется дополнительный переклю-
чатель для использования этой кнопки при применении оружия по визуально
видимым целям.
Система СУО взаимодействует с оборудованием СУВ по цифровым ли-
ниям связи. В ее специализированном цифровом логическом устройстве ре-
шаются задачи СУО по подготовке и применению ракет.
3.4.2. Состав и характеристики СУВ С-27 самолета Су-27
Система управления вооружением самолета Су-27 (система С-27) вклю-
чает (рис. 3.4.2): радиолокационную обзорно-прицельную систему; оптико-
электронную прицельную систему; систему управления оружием; блоки со-
пряжения с вооружением.
Система С-27 сопрягается со следующими элементами БРЭО:
• пилотажно-навигационным комплексом;
• бортовой частью аппаратуры командной радиолинии управления;
322
Рис. 3.4.2. Структурная схема системы управления вооружением С-27
• аппаратурой системы государственного опознавания с включением в со-
став системы С-27 блока запросчика ГО;
• аппаратурой межсамолетной телекодовой связи и передачи данных на
землю;
• бортовым комплексом обороны самолета.
Радиолокационная обзорно-прицельная система, в свою очередь, включа-
ет: БРЛС, цифровую вычислительную систему, систему единой индикации,
пульты управления.
Принципы построения БРЛС системы С-27, структура и основные ее так-
тико-технические характеристики приведены в п. 3.3.3. Работу и реализацию
функциональных возможностей БРЛС обеспечивает БЦВМ. На нее возлагает-
ся организация режимов БРЛС, управление аппаратурой и обработка прини-
маемой информации. С помощью этой БЦВМ решаются также и другие зада-
чи радиолокационного канала СУВ: управление истребителем, организация
групповых действий самолетов, целеуказание головкам самонаведения ракет
и выдача им команд радиокоррекции, организация информационного обмена
2Г
323
с радиоэлектронной аппаратурой, отображение пилотажно-прицельной, об-
зорной и тактической информации на экранах системы единой индикации.
Для решения аналогичных задач теплового канала СУВ используется вто-
рая БЦВМ. Структура двух независимых информационных каналов с после-
дующей обработкой и выходом на средства поражения целей значительно по-
вышает живучесть системы и позволяет распараллелить работы при ее отладке.
Цифровая вычислительная система СУВ С-27
Входящие в СУВ две БЦВМ, обеспечивающие работу радиолокационного
и теплового каналов, именуются подсистемными специализированными циф-
ровыми вычислителями (СЦВ) и обозначаются соответственно СЦВ-1 и
СЦВ-2.
Идея использования двух универсальных подсистемных СЦВ, связанных
обработанными информационными потоками, положена в основу формиро-
вания бортовой цифровой вычислительной системы (ЦВС). Система связей
ЦВС с абонентами бортовой радиоэлектронной аппаратуры принята радиаль-
ного типа по каналам связи с тестированными видом и уровнем передаваемых
по ним электрических сигналов. Связь подсистем СУВ также обеспечивается
тестированными линиями низкочастотного обмена вторично обработанной
информацией.
Связь СЦВ с блоками подсистемы (цифровыми обнаружителями сигналов,
пультами управления, индикаторами и т.д.) определяется высокой частотой
решения задач, большими потоками информации, требованием минимального
времени реакции на запрос обслуживания любого блока. В подсистемах СУВ
используется унифицированная цифровая параллельная магистраль, управле-
ние которой осуществляют подсистемные СЦВ, а блоки каждой подсистемы
подключаются к магистрали через устройства сопряжения по команде СЦВ.
Наличие исполнительных устройств, таких, как приводы антенн БРЛС,
ставит задачу преобразования управляющего сигнала в аналоговую форму и
наоборот. Это определяет необходимость наряду с параллельной магистралью
в составе каждой под системной СЦВ иметь также аналого-цифровые и циф-
ро-аналоговые преобразователи.
В качестве подсистемных СЦВ в ЦВС системы С-27 использовались
БЦВМ 3-го поколения А-2009 (Ц-100) разработки НИЦЭВТ. На заключитель-
ном этапе испытаний системы С-27 в радиолокационный канал вместо БЦВМ
Ц-100 со средними интегральными схемами была введена аналогичная БЦВМ
Ц-101 с большими интегральными схемами. Эта БЦВМ характеризуется сле-
дующими данными:
Эффективная производительность, тыс. опер/с...................... ~ 425
Оперативное запоминающее устройство. Кбайт......................... 16
Постоянное запоминающее устройство, Кбайт......................... 128
Возможность оперативных доработок программ на базе использования
элементов рспрограммируемой долговременной памяти;
Наличие параллельных и последовательных каналов обмена;
Время наработки на отказ, ч....................................... 1000
Масса, кг.......................................................... 20
Потребляемая мощность, Вт.......................................... 200
324
Сравнительный анализ эффективности БЦВМ производится посредством
единичных показателей, таких, как производительность, объем памяти, на-
дежность, масса, энергопотребление. При этом применяют процедуры много-
критериальных задач и, в частности, принцип относительных оценок. При ис-
пользовании относительных оценок абсолютные количественные характери-
стики Ну (i - номер исследуемого качества, j - тип БЦВМ) переводятся в
относительные по следующим правилам:
ТТ _ Т1 TJ _ тт
тт _ J п ij п i min fl — Л 17 ij________________imax
‘ н — н ) н — н
11 i max 11 i min 11 i max 1 i min
где I, - нормирующий множитель, принимающий значение 1, если критерий
Hi нормальный и значение 0, если критерий Ц инверсный; Himax и - мак-
симальное и минимальное значение i-ro частного критерия сравниваемого ря-
да БЦВМ соответственно. Обобщенный показатель эффективности j-й БЦВМ
определяется соотношением Я, = sum (A, Нщ), где А, - экспертные оценки ве-
совых коэффициентов, учитывающие значимость i -го качества.
Рассчитанный по данным соотношениям для сравнительной характери-
стики ряда БЦВМ [3.3, 3.7] обобщенный показатель эффективности БЦВМ
Ц-101 составляет Я/= 1,22. Аналогичный показатель эффективности БЦВМ
"Аргон-15" самолета МиГ-31 для тех же весовых коэффициентов имеет зна-
чение Н? = 0,40.
Система индикации СУВ С-27
В состав системы индикации СУВ входят: прицельно-пилотажный инди-
катор (ППИ), индикатор тактической обстановки (ИТО), электронный блок,
блок электропитания.
Устройство ППИ представляет собой электронно-оптический индикатор с
формированием информации в буквенно-цифровом и графическом виде на
экране электронно-лучевой трубки и последующим переносом этого изобра-
жения на полупрозрачный отражатель посредством коллиматорной системы;
применяется проекционная трубка с высокой яркостью, работающая в двух
режимах вывода прицельно-пилотажной информации: буквенно-цифровом и
графическом с количеством символов 120 и 60 совместно с обзорной инфор-
мацией на 60-строчном растре.
Устройство ИТО представляет собой электронный индикатор прямого
видения с формированием отображаемой информации в буквенно-цифровом
и графическом виде с необходимым количеством символов.
Индикаторы ППИ и ИТО могут взаимно дублировать друг друга. Частота
повторения информации на экранах ППИ и ИТО - 50 Гц. В состав индикато-
ров входят субблок с отклоняющей и фокусирующими системами, узлы раз-
вертки и усилитель подсвета с датчиком освещенности. Система индикации
обеспечивает нормальное восприятие летчиком изображения на экранах ин-
дикаторов без применения тубуса при прямом освещении солнца.
Электронный блок системы индикации выполняет функции:
• сопряжения с информационной магистралью СЦВ-2;
• записи, хранения и регенерирования символов ППИ и ИТО;
325
• записи, хранения и регенерирования обзорной информации с имитацией
послесвечения отметки цели с заданным временем;
• формирования аналоговых напряжений развертки луча;
• формирования всей необходимой синхронизации, в том числе в режимах
выключения БРЛС.
Оптико-электронная прицельная система
Входящая в состав СУВ С-27 оптико-электронная прицельная система
ОЭПС-27 разработана в ЦКБ "Геофизика" (главный конструктор Хорол Д. М.).
Она предназначена для поиска, обнаружения и сопровождения воздушных це-
лей по их инфракрасному излучению, определения координат линии визирова-
ния при работе летчика по визуально видимым целям, измерения дальности и
решения задач прицеливания по воздушным и наземным целям.
В состав ОЭПС-27 (рис. 3.4.3) входят:
• оптико-локационная станция (ОЛС-27), состоящая из обзорно-следящего
теплопеленгатора и лазерного дальномера;
• нашлемная система целеуказания (НСЦ);
• специализированный цифровой вычислитель (СЦВ-2).
Рис. 3.4.3. Оптико-электронная
прицельная система ОЭПС-27
Разработка НСЦ под шифром
"Щель" выполнена в ПО "Арсенал"
(г. Киев). В качестве СЦВ-2 исполь-
зована БЦВМ Ц-100, математиче-
ское обеспечение которой разрабо-
тано в ГосНИИАС.
В состав ОЛС входят: моноблок
ОЛС, электронный блок теплопс-
ленгатора, блок питания теплопс-
ленгатора, блок управления даль-
номера, электронный блок дально-
мера, блок питания дальномера.
Моноблок ОЛС включает следующие основные устройства:
• общий для теплопеленгатора и дальномера узел сканирования, предна-
значенный для просмотра заданных полей обзора и направления оптиче-
ской оси в любую точку зоны обзора в режимах отработки целеуказания и
автосопровождения;
• оптико-механическое устройство теплопеленгатора, обеспечивающее
прием и модуляцию инфракрасного излучения, преобразование его в
электрический сигнал, усиление и оптимальную частотную обработку
видеосигнала;
• блок пневмопитания теплопеленгатора, предназначенный для охлаждения
чувствительных элементов приемного устройства до температуры жидко-
го азота;
• приемопередающес устройство лазерного дальномера, обеспечивающее
формирование зондирующих импульсов излучения в соответствии с не-
обходимым режимом работы, приема и обработки отраженных импуль-
сов от цели.
326
Электронный блок теплопеленгатора выполняет:
• преобразование и обмен информацией с СЦВ-2;
• обработку всей информации, поступающей с оптико-механического уст-
ройства теплопеленгатора;
• выработку сигналов управления приводами сканирующего зеркала и мо-
дулятора по командам, поступающим из СЦВ-2;
• выработку сигналов контроля работы теплопеленгатора.
Блок управления дальномера предназначен для обеспечения необходимо-
го режима работы оптического квантового генератора и формирования им-
пульса, необходимого для блокировки измерительной части дальномера на
время от момента поджига лампы "накачки" квантового генератора до момен-
та его излучения.
Электронный блок осуществляет выработку напряжений питания прие-
мопередающей части дальномера, прием и выдачу команд для управления его
режимами, измерение временных интервалов от опорного до эхо-импульса и
выдачу информации о дальности до цели.
В конструкции ОЛС обзор пространства осуществляется с помощью ка-
чания в двух взаимно перпендикулярных плоскостях закрепленного в карда-
новом подвесе зеркала. Это зеркало в режиме автосопровождения является
исполнительным элементом следящей системы, которая обеспечивает непре-
рывное совмещение оптической оси теплопеленгатора и лазерного дальноме-
ра с направлением на цель. Такое совмещение необходимо для обеспечения
минимально возможного растра луча квантового генератора. При этом требо-
вания по точности совмещения осей теплового и лазерного каналов лежат в
пределах нескольких минут.
В фокальной плоскости объектива располагается фотоприемник, предна-
значенный для приема инфракрасного излучения. Мгновенное поле его зре-
ния реализуется по углу места линейкой чувствительных элементов фотопри-
емника, охватывающих при прокачке зеркала в азимутальной плоскости объ-
ектива строку по углу места шириной около 3°. Просмотр полей обзора
осуществляется посредством прокачки зеркала, закрепленного в кардановом
подвесе. С помощью того же карданового подвеса осуществляется перенос по
внешнему целеуказанию центра зон.
Переход в поле захвата 3x3° формируется по поступлению из СЦВ-2 со-
ответствующей команды. Если в этом поле находится одна цель, ОЛС пере-
ходит в режим автосопровождения, если же несколько, то вводится дополни-
тельная обработка поступающей информации и регулировка тракта усиления
приемника.
Оптический квантовый генератор, являющийся излучателем дальномера
ОЛС, располагается на неподвижном основании, и его излучение с помощью
системы зеркал направляется по оптической оси объектива, который для ла-
зерного излучения является приемопередающим. Значительная мощность из-
лучения квантового генератора определяет ограничение на борту по энерге-
тике питающих его устройств, что, в свою очередь, обусловливает введение
ограничений на применение дальномера и использование его в дежурном и
рабочих режимах.
327
Входящая в состав ОЭПС система НСЦ включает:
• нашлемное визирное устройство, укрепляемое на шлеме летчика;
• блок оптической локации со сканерным устройством определения пово-
рота головы летчика;
• блок электроники, обеспечивающий работу сканирующего устройства и
определение координат линии визирования цели.
По визуальному каналу ОЭПС с помощью аппаратуры НСЦ обеспечивает:
• возможность поиска летчиком цели в зоне ±60° по азимуту и от -15 до
+60° по углу места;
• измерение координат линии визирования при слежении за целью со ско-
ростью линии визирования 20 градС.
ОЭПС сопряжен с двумя СЦВ СУВ, с пилотажно-навигационным ком-
плексом, с системой управления оружием и с пультом управления.
По инфракрасному каналу ОЭПС обеспечивает:
• автономный поиск воздушных целей в поле обзора размером 60° по ази-
муту и 10° по углу места с возможностью переноса в полной зоне обзора
±60° по азимуту и от -15 до +60° по углу места относительно строитель-
ной оси самолета;
• обнаружение в простых метео- и фоновых условиях на средних высотах
типового истребителя при работе его двигателей в режиме "Максимал" на
дальностях от 15 км до 50 км в зависимости от ракурса цели q при изме-
нении его от 0/4 до 4/4;
• автоматический захват обнаруженной цели в зоне 3 х 3° на дальности,
равной 70% от дальности обнаружения;
• автоматическое сопровождение воздушной цели в полной зоне обзора
при максимальных возможных значениях угловой скорости линии визи-
рования 25 град/с.
Диапазон измеряемых дальностей лазерным дальномером, входящим в
состав ОЛС, составляет 0,3...3,0 км при работе по воздушным целям и
0,3...5,0 при работе по наземным целям. Точность измеряемых координат
достигает: по углам - 5', по дальности - 10 м [3.14].
Введение в СУВ аппаратуры, работающей в диапазоне оптических и ин-
фракрасных длин волн, обеспечивает выполнение скрытности обнаружения,
увеличение точности измерения координат по углу и по дальности и позволя-
ет дублировать в основных режимах работу БРЛС. После получения инфор-
мации о всех целях, находящихся в поле обзора, осуществляются выбор ата-
куемой цели, ее захват и сопровождение с выдачей координат головкам само-
наведения ракет. В процессе организации боя ОЭПС выдает необходимую
информацию для управления самолетом и пуска ракет.
В отсутствие визуальной видимости аналогично организуется ракетный бой
на любых дальностях до цели. При этом используется дальномер на допустимых
дальностях его работы. В условиях визуальной видимости воздушный бой про-
исходит по следующей схеме: визуальное обнаружение цели - наведение с по-
мощью НСЦ зоны автоматического захвата ОЛС - захват цели ОЛС - сопровож-
дение цели - целеуказание головкам самонаведения. Одновременно с наведением
ОЛС координаты линии визирования цели передаются на БРЛС и ГСН ракет.
328
С помощью НСЦ оптико-электронная прицельная система обеспечивает
возможность визуального поиска летчиком цели в зоне ±60° в горизонтальной
плоскости и -15°...+60° в вертикальной, а также измерение параметров цели
при вращении линии визирования с угловой скоростью до 20% [3.14]
Совместное использование НСЦ и ОЛС позволяет в ближнем маневрен-
ном бою:
• сократить время прицеливания;
• осуществить быстрый захват цели;
• обеспечить целеуказание ГСН до захода цели в конус возможных углов
захвата ГСН цели и тем самым осуществить пуск ракет при максимально
допустимых углах;
• облегчить летчику режим работы (визуальное сопровождение цели может
быть прекращено после захвата ее ОЛС).
Оптико-электронная прицельная система позволяет использовать несин-
хронный метод прицеливания и обеспечить применение стрелково-пушечного
вооружения с точностью, существенно превосходящей точность, достижимую
при реализации других известных технических решений.
Получению таких качеств ОЭПС предшествовали длительная отработка
аппаратуры в лабораторных и летных условиях, анализ полученных результа-
тов и введение доработок, улучшающих характеристики аппаратуры. В 1980 г.
в ГосНИИАС был создан комплекс полунатурного моделирования КПМ-2700
для стендовой отработки аппаратуры СУВ. Отработанный на нем ОЭПС-27
первой редакции в начале 1981 г. был поставлен на пятый самолет Су-27 (10-5).
Этот самолет был специально выделен для проведения автономных испытаний
ОЭПС-27. В конце 1982 г. после проведения стендовых испытаний ОЭПС-27
второй редакции был установлен в составе СУВ на самолете 10-11.
До середины 1982 г. продолжались летные испытания ОЭПС-27 на само-
летах 10-5 и 10-11, пока не было принято решения о замене в СУВ устаревшей
БЦВМ "Аргон-15" на БЦВМ новых технологий Ц-100. Такая замена БЦВМ по-
требовала переработки всего математического обеспечения ОЭПС-27.
Параллельно велись работы на КПМ-2700 по стыковке нового математи-
ческого обеспечения с устройствами ОЭПС-27, которые также дорабатыва-
лись. Эти доработки велись с учетом замечаний, сделанных в процессе пред-
шествовавших полунатурных и летных испытаний ОЭПС-27, что позволило
значительно улучшить ее тактико-технические характеристики. В середине
1983 г. была передана на серийный завод документация по отработанному
программному обеспечению ОЭПС-27 на БЦВМ Ц-100.
Изготовленные на заводе летные образцы БЦВМ Ц-100 с математическим
обеспечением ОЭПС-27 для работы в составе СУВ прошли на КПМ-2700 до-
полнительную проверку. В начале 1984 г. эти образцы установили на самоле-
ты 10-18 и 10-22. После проведения заводского этапа летных испытаний
ОЭПС-27 вышла на совместные летные испытания в составе СУВ. По окон-
чании их и устранении ряда недостатков ОЭПС-27 в составе СУВ в начале
1985 г. была передана на Государственные испытания. В процессе проведения
этих испытаний замечаний к ОЭПС-27 не было. В конце 1985 г. ОЭПС-27 и
вся система СУВ на самолете Су-27 были приняты на вооружение страны.
329
Связь СУВ с оружием
Для проведения подготовки оружия к боевой работе в состав СУВ входит
блок связи и контроля, который обеспечивает выдачу всех необходимых сиг-
налов и команд в соответствии с временным графиком подготовки оружия к
применению. Связи этого блока с ГСН ракет организованы на основе унифи-
кации сигналов для всех ракет. Целеуказание ракетам обеспечивается единой
бортовой системой целеуказания, использующей все бортовые источники ин-
формации. Подготовка ракет к пуску и их пуск осуществляются системой
управления оружием.
В целях снижения загрузки летчика при боевом применении оружия СУО
обеспечивает:
• переход от применения одного вида оружия к другому без снятия рук
летчиком с органов управления самолетом;
• полуавтоматический и ручной режимы подготовки и применения оружия;
• программный расход боекомплекта ракет;
• выдачу на индикацию сигналов о выбранном для применения оружии, его
состоянии, о расходе и остатке боекомплекта.
Для применения оружия без съема рук с органов управления самолетом ус-
танавливаются :
• на ручке управления самолетом - переключатель "Пушка - ракеты" и бое-
вая кнопка;
• на ручке управления двигателем — кнопка-переключатель положения вы-
бора групп подвесок применяемого оружия.
Рис. 3.4.4. На истребителе Су-27 выбор ракет и их пуск в дальнем и ближнем воздушных
боях производится летчиком с использованием системы управления оружием
330
При разнородной загрузке летчиком может выбираться одна из трех сим-
метрично загруженных пар подвесок: крыльевые, фюзеляжные и мотогон-
дольные подвески (рис. 3.4.4). После выбора пары подвесок с необходимым
оружием происходит их программная разгрузка.
Связь системы СУО с бортовым оборудованием осуществляется по циф-
ровым линиям связи. Логические задачи СУО по подготовке и применению
оружия решаются в ее специализированном цифровом логическом устройст-
ве. Такое построение СУО дает возможность изменять набор оружия, логику
управления им и временные интервалы подготовки его к пуску.
3.4.3. СУВ - система, обеспечивающая решение задач
боевого применения
Функциональный облик системы "Заслон"
Система "Заслон" во взаимодействии с бортовой аппаратурой перехват-
чика МиГ-31 обеспечивает:
• одиночный и групповой выход в боевое соприкосновение с воздушными
целями в режимах командного наведения, бортового наведения, бортово-
го поиска;
• управление перехватчиками группы с борта ведущего на основных этапах
боевых действий, в том числе при выходе в исходное положение для ата-
ки, при атаке, выходе из атаки;
• передачу с борта ведущего группы информации об обнаруженных целях в
НАСУ;
• захват и сопровождение 10 целей с характеристиками, обеспечивающими
пуск ракет по четырем целям;
• отображение на ИТО информации о целях и перехватчиках группы, по-
ступающей от БРЛС, ТП, НАСУ, ведомых;
• формирование и отображение на ИТО признаков источника информации,
траектории движения целей и истребителя, целеуказания и др.;
• формирование и отображение на ИТО данных, обеспечивающих реше-
ние экипажем задач полета в заданном боевом порядке, поиска целей в
ручном режиме по данным целеуказания и изображению цели на ИТО,
выбора целей для атаки или целераспределения для ведущего группы,
выхода в атаку и из нее;
• отображение на ИТО навигационно-тактической обстановки в различных
системах координат;
• ручной ввод в систему для обработки и передачи ведомым координатной
информации о цели, целеуказания, назначения целей на атаку, команд
управления перехватчиком (Нзал, у!ад), команд режимов полета (в том
числе режима фо) и места в строю;
• стрельбу ракетами с выдачей целеуказания в подвесе с инерциальным
участком и полуактивным наведением;
• выход на постановщик помех и его атаку;
• сопровождение целей в телесном угле 140°.
331
Рассмотрим логику выбора режимов управления перехватчиком, реали-
зуемых в СУВ "Заслон". Управление полетом МиГ-31 от СУВ выполняется
двумя способами - ручным и автоматическим. Назначение способа произво-
дится оператором установкой клавиши "Наведение" в соответствующее по-
ложение ("ручной"-"автомат"). Управление самолетом осуществляется при
решении с помощью СУВ "Заслон" следующих боевых задач:
• выход в исходную точку наведения (ИТН), район барражирования, задан-
ную точку в строю (ЗТ);
• бортовое наведение (БН);
• бортовой поиск (БП);
• атака по данным БРЛС одиночной цели одним перехватчиком (1x1), не-
скольких целей (до четырех) одним перехватчиком при наличии помех
(IxN), одной цели парой перехватчиков (2x1), одиночной цели одним пе-
рехватчиком при наличии помех, с использованием пушек;
• атака по данным теплового канала (ТК);
• наведение в режиме имитируемой цели.
В случае назначения оператором способа управления "автомат" при от-
сутствии на борту атакуемой цели и наличии команды "Командное наведе-
ние", пришедшей на линии КРУ "Радуга - Борт", управление перехватчиком
выполняется системой САУ по командам наземной АСУ (с помощью цифро-
вого вычислителя ЦВТУ).
Задачи выхода в ИТН и в ЗТ решаются при ручном способе управления и
соответствующем назначении режима на пульте оператора алгоритмом "Руч-
ное наведение" по задаваемым оператором значениям Нид,
Режим БН задается ведущему специальным признаком по линии "Радуга-
Борт" и выполняется алгоритмом "Бортовое наведение" при выборе способа
наведения "автомат", алгоритмом "Ручное наведение" - при ручном способе.
Режим БП на ведущем задается соответствующей командой КРУ и вы-
полняется по алгоритму "Ручное наведение".
Атака по данным РЛС реализуется при наличии признака "Сопровожде-
ние РЛС" и команды "Атака", вырабатываемой БЦВС при назначении цели на
атаку автоматически, либо оператором с пульта. Управление перехватчиком
осуществляется по алгоритмам "Самонаведение 1x1", "Самонаведение IxN",
"Атака парой", "Наведение при неполной информации", "Пушки" в случае
выбора способа наведения "автомат" либо по алгоритму "Ручное наведение"
при выборе способа "ручной".
Атака по данным теплового канала назначается при наличии признака
"Сопровождение ТК" и команды "Атака" по алгоритмам:
• "Наведение при неполной информации" - при автоматическом наведе-
нии;
• "Ручное наведение" - в случае ручного способа управления.
Режим имитируемой цели вводится оператором с пульта, и в случае на-
личия команды "Атака" реализуется режим "Самонаведение" или "Пушки".
Основной штатный режим управления перехватчиком, реализуемый с
помощью СУВ "Заслон" после захвата и назначения цели на атаку, - самона-
ведение на одиночную цель, которое, в свою очередь, включает следующие
этапы:
332
• самонаведение с выбором горизонтальной составляющей ошибки прице-
ливания АС и выходом на высоту Нзад (этап "до горки");
• пространственное самонаведение с выбором обеих составляющих ошиб-
ки АГ , А5 (этап "горка");
• приведение к горизонту при достижении минимально допустимой высо-
ты Hmin с ее стабилизацией и выбором горизонтальной ошибки А/’ (этап
"стабилизация высоты").
В режиме самонаведения по нескольким атакуемым целям ("IxN") управ-
ление выполняется с использованием алгоритма "1x1" с наведением на фик-
тивную усредненную цель.
Назначение и основные задачи, решаемые СУВ С-27
СУВ истребителя Су-27 предназначена для обеспечения решения боевых
задач по уничтожению воздушных целей авиацией ВВС и авиацией ПВО при
ведении групповых автономных и полуавтономных боевых действий, а также
для применения вооружения самолета при действиях по наземным объектам
противника.
Основными задачами системы С-27 являются:
а) всеракурсное автоматическое обнаружение, опознавание (совместно с
системой госопознавания), сопровождение и определение "на проходе" коор-
динат воздушных целей во всем диапазоне высот боевого применения истре-
бителя, в том числе на фоне земной и водной поверхности и радиоконтраст-
ной облачности, днем и ночью, в простых и сложных метеоусловиях при ис-
пользовании противником помехового противодействия;
б) формирование сигналов управления истребителем для обеспечения:
• выхода в зону обнаружения обзорных средств С-27 по командам наведе-
ния существующих и перспективных автоматизированных систем, АК
РЛДН и автономно по разовой информации о цели;
• выхода в зону возможного пуска управляемых ракет и стрельбы из пушки;
• выхода из атаки;
в) решение задач, связанных с подготовкой и пуском управляемых ракет,
стрельбой из пушки и бомбометанием;
г) обеспечение групповых действий истребителя без поддержки наземных
(воздушных) АСУ:
• с организацией автоматизированного обмена информацией целеуказания
и целераспределения, выдаваемой в комплекс средств связи;
• с отождествлением координат воздушных целей, получаемых от БРЛС,
ОЭПС с координатами от ведомого, ведущего и НАСУ;
• с нанесением одновременных и последовательных залповых ударов каж-
дым видом ракетного вооружения.
Наличие радиолокационного и оптико-электронного каналов и их функ-
циональная увязка между собой (через ЦВС) обеспечивают всепогодность,
помехозащищенность, скрытность применения, а дублирование источников
информации (бортовая РЛС, теплопеленгатор, лазерный дальномер, нашлем-
ная система целеуказания) и решаемых в спецвычислителях задач увеличива-
ет надежность системы в целом (табл. 3.4.2).
333
Для разгрузки летчика при работе в реальных боевых ситуациях в систе-
ме С-27 автоматизированы процессы по обнаружению, опознаванию и опре-
делению наиболее опасной цели из взятых на сопровождение, по выбору типа
применяемого оружия, наведению и пуску управляемых ракет, а также реше-
ние большого числа задач, связанных с обеспечением групповых действий.
Функции, выполняемые подсистемами СУВ С-27
Таблица 3.4.2
Режим цвс БРЛС ОЭПС
ПАССИВ- & I в Е i > 3 ) 1. Организация "опознавания"- 2. Выдача информации о сопровождаемой цели. 3 Отождествление. 4. Передача информации в ТКС по команде летчика 1. По команде ЦВС направление антенны на цель. 2. Стабилизация луча. 3. Обнаружение цели и определение D,VC6n Работа ОЛС в режиме"Обзор", выдача в ЦВС угловых координат цели
И и S О к £ X 5 3 1. Вычисление координат центра зоны обзора. 2. Организация измерения D, Vc6n в БРЛС. 3. Отождествление. 4. Выдача информации на ИТО 1. Формирование задан- ной ЦВС зоны обзора. 2. Стабилизация луча. 3. Обнаружение цели и определение D, £г ,
1 1 е* Jifda inavnr 1. Управление БРЛС в "захвате”. 2. Управление системой ГО. 3. Отождествление 1. Стабилизация антенны. 2. Измерение D, Усвл, Ег, ев . 3. Формирование сигнала ГО
% 1 с с с с с ч ление 1 .У правление БРЛС. 2 .Решение задачи сопровождения. 3 .Вычисление ,V„ , Нц . 4.0тображение на ППИ, ИТО 1. Замедление антенны и стабилизация. 2. Решение задачи сопро- вождения по D, Усвл, фг, Фв
1 0 5 По команде летчика выдача в ТКС информации о цели
£ ы в £ в а 1. По информации ТКС организация сопровождения атакуемой цели. 2. Вычисление зоны поиска. 3. Включение БРЛС, организация обнаружения, захвата и сопровождения цели. 4. Проведение отождествления целей БРЛС с целью ТКС. 5. Отображение на ППИ, ИТО Ожидание целеуказания от ТКС
с с i в i 0 в 5 1. Решение задачи управления истребителем. 2. Выдача целеуказания ОЛС. 3. Совместная обработка информация БРЛС, ОЛС, СРТР . 4. Решейие задачи выбора типа оружия. 5. Вычисление и отображение на ИТО зоны досягаемости ракет. 6. Расчет команды целеуказания на ракеты. 7. Управление пуском ракет. 8. Управление БРЛС. 9. Отображение на ППИ, ИТО Работа аналогично режиму активного поиска, осуществление сопровождения на проходе атакуемой цели Организация захвата и сопровождения атакуемой цели по целеуказанию от ЦВС; выдача информации в ЦВС
Инер- С * s ° я Q 1 s 5 Й > I 1. Решение задачи управления истребителем. 2. Совместная обработка информации БРЛС, ОЛС, СРТР. 3. Вычисление момента По командам ЦВС осуществление переключения несущей частоты
Г амиипис наведение включения подсвета 4. Отображение информации на ППИ и ИТО Непрерывное сопро- вождение цели. Одновременная работа целевого канала и канала подсвета
334
Использование цифровой обработки позволило значительно расширить
круг решаемых задач, автоматизировать процесс работы с СУВ, повысить ее
помехозащищенность, надежность.
Рассмотрим функции, выполняемые подсистемами СУВ С-27 в различ-
ных режимах при их взаимодействии (см. табл. 3.4.2). Исходя из анализа воз-
можных тактических ситуаций и функций, возложенных на систему С-27,
можно представить следующие этапы выполнения боевой задачи: поиск цели,
целераспределение, атака, выход из атаки.
На этапе поиска (до момента обнаружения целей) возможны режимы пас-
сивного и активного поиска. При пассивном поиске используется информа-
ция, поступающая от станции радиотехнической разведки СРТР комплекса
обороны, оптико-электронной прицельной системы ОЭПС, комплекса средств
связи ТКС (информация, поступающая от ведомых самолетов, вышестоящего
командира, с борта самолета МиГ-31, от системы "Шмель", от НАСУ).
На основе анализа информации этапа пассивного поиска либо по команде
вышестоящего командира летчик переводит систему в режим активного по-
иска. Зона и центр зоны обзора при этом могут устанавливаться как вручную,
так и автоматически по команде ведущего или НАСУ.
На этапе целераспределения летчик, наблюдая на экране ИТО воздушную
обстановку, вводит в ЦВС номера атакуемых целей, признак групповой цели,
количество целей в группе. ЦВС организует автоматическую передачу через
ТКС на борт каждого истребителя координат и параметров атакуемых целей.
Вычислительная система выполняет отождествление цели, поступающей
по линии ТКС, и цели, обнаруженной в зоне поиска, и переходит в режим
атаки. При обнаружении в зоне поиска других опасных целей ведомый пере-
дает их координаты на борт ведущего. На этапе атаки ЦВС осуществляет
управление истребителем.
На индикаторы системы отображения информации выводится:
• в режиме пассивного поиска - обзорная информация ОЭПС (на ППИ),
цель РЛС и информация ТКС (на ИТО);
• в режимах активного поиска и целераспределения - обзорная информа-
ция ОЭПС и БРЛС, признак "свой-чужой", признак сопровождаемой цели
(на ППИ); координаты и параметры целей, сопровождаемых БРЛС и
ОЭПС, информация ТКС (на ИТО);
• в режимах атаки воздушных целей на ППИ отображаются также дирек-
торные сигналы управления самолетом и команда "Пуск разрешен".
Назначение ЦВС:
• комплексирование подсистем СУВ и управление ими в процессе боевой
работы;
• организация поиска, обнаружение, сопровождение цели (целей);
• обеспечение отображения обзорной, прицельно-пилотажной, тактической
информации СУВ;
• выполнение задач управления истребителем и вооружением на всех эта-
пах;
• организация автоматизированного контроля работоспособности всех под-
систем СУВ;
• организация обмена информацией СУВ с элементами борта.
335
Основные задачи, решаемые СУВ С-27:
• формирование режимов работы СУВ по командам с пультов управления;
• организация обзора, формирование зоны и центра зоны по информации
ОЛС, НСЦ, КРУ и т.д.;
• управление лучом БРЛС и отождествление обзорной информации;
• вторичное обнаружение и измерение координат "на проходе";
• обеспечение работы системы госопознавания;
• сопровождение "на проходе";
• точное сопровождение цели;
• сглаживание и экстраполяция координат, отождествление с обновленной
информацией;
• выбор опасной цели и назначение цели на атаку;
• управление истребителем при использовании всех видов вооружения;
• управление истребителем при использовании команд с земли и от ведомого;
• организация групповых действий;
• целеуказание головкам самонаведения ракет;
• радиокоррекция;
• отображение пилотажной и тактической информации во всех режимах
работы СУВ;
• организация информационного обмена с бортовым радиоэлектронным
оборудованием;
• автоматизированный контроль СУВ и сервис вспомогательных программ.
Развитие бортовых систем управления вооружением
Бортовые системы истребителей развивались в направлении наращивания
функциональных возможностей и их объединения (комплексирования) в еди-
ную автоматизированную систему. Так, если в 40-50-х годах появились
отдельные автоматизированные устройства (РЛС, оптический прицел, авто-
пилот), то уже в 60-х годах начали создаваться единые системы управления
вооружением класса "воздух-воздух", а в 70-80-е годы реализуются функцио-
нально законченные автоматизированные системы, решающие задачи "воз-
дух-воздух" и "воздух-поверхность" для истребителей тактического назначе-
ния и перехватчиков. Указанные направления можно рассматривать как этапы
функционального комплексирования [3.4, 3.5, 3.8, 3.9]. Наряду с этим шел
процесс развития структурного комплексирования и совершенствования вы-
числительных систем и систем передачи данных. Можно выделить такую по-
следовательность этапов:
• системы с аналоговыми вычислительными устройствами и радиальным
обменом по аналоговым линиям передачи данных - 50-е годы;
• системы с аналоговыми и цифровыми вычислительными устройствами и
радиальным обменом по аналоговым линиям передачи данных - 60-е годы;
• системы с цифровыми и аналоговыми вычислительными устройствами и
радиальным обменом по цифровым линиям передачи данных - 70-е годы;
• цифровые системы с цифровыми вычислительными устройствами и свя-
зью по мультиплексному цифровому каналу информационного обмена -
80-е годы.
336
Однозначного принципа объединения отдельных подсистем в системы
более высокого ранга не существовало. На борту каждого истребителя это
объединение (комплексирование) производилось с учетом особенностей бое-
вого назначения конкретного самолета, традиций и представлений разработ-
чиков.
В 70-е годы, когда начинает формироваться идеология построения борта
проектируемых истребителей МиГ-31 и Су-27, утверждается понятие системы
управления вооружением, объединяющей информационные подсистемы, вы-
числительные средства и индикационное оборудование для эффективного
выполнения авиационным боевым комплексом целевого назначения и такти-
ко-технических требований. СУВ этих самолетов, и сегодня состоящих на
вооружении ВВС России, создавались и отрабатывались в основном коллек-
тивами НИИ приборостроения и ГосНИИАС. Благодаря этому сложились
близкая структура и принципы организации систем управления вооружением
"Заслон" и С-27. В состав этих СУВ включались: бортовая радиолокационная
станция, оптико-локационная станция (теплопеленгатор), система индикации
экипажу, цифровая вычислительная система, включающая один или два спец-
вычислителя (состав этих СУВ дан в пп. 3.4.1 и 3.4.2). Взаимодействие СУВ с
другими системами бортового оборудования основано на радиальном прин-
ципе обмена данными по цифровым и аналоговым линиям в соответствии с
протоколами информационного обмена.
Одним из вариантов такого взаимодействия можно считать построение
борта МиГ-31, где выделяются функционально законченные группы спецобо-
рудования:
• система управления вооружением;
• система связи и госопознавания;
• система радиоэлектронной борьбы;
• комплекс пилотажных и навигационных систем.
Цифризация бортового радиоэлектронного оборудования и использова-
ние мультиплексных каналов информационного обмена (МКИО) изменили
подходы к построению отдельных бортовых систем и их интеграции [3.9].
В 1984 г. ГосНИИАС выпустил "Положение о порядке комплексирования
бортовых систем", согласованное со всеми сторонами процесса разработки
бортового оборудования военных самолетов и утвержденное министром
Минавиапрома и главнокомандующим ВВС.
Под комплексированием бортовых систем понимается совокупность ме-
роприятий, направленных на решение задачи рационального и надежного
функционирования бортовых систем в целом, на заданном уровне их характе-
ристик, а также составных частей этих систем, обеспечивающих при их инте-
грации решение боевых задач авиационных комплексов.
При этом бортовое оборудование самолета полагается разделенным на
две группы:
• группа общесамолетного оборудования и управления силовой установкой;
• группа специального оборудования, обеспечивающая выполнение целе-
вых функций, являющаяся расширенным представлением системы управ-
ления вооружением современного истребителя и перехватчика.
337
22 - 4094
В качестве типового варианта устанавливаются уровни комплексирова-
ния внутри каждой из групп бортового оборудования: комплексный, систем-
ный, подсистемный. Декомпозиция единой группы бортового оборудования
на составные части этих иерархических уровней производится исходя из объ-
ема и состава решаемых функциональных задач, степени их взаимодействия и
состава оборудования. Взаимодействие внутри каждого из уровней и между
ними, а также с экипажем обеспечивается за счет управления потоками ин-
формации, ее совместной обработки в БЦВМ соответствующих уровней и
отображения на системах индикации рабочих мест экипажа.
В состав группы специального оборудования (СУВ) входят (рис 3.4.5):
• автоматизированная система управления (АСУ) средствами группы спе-
циального оборудования, включающая систему обобщенной индикации,
средства индикации боевых режимов и тактической обстановки, пульты
управления оборудованием, цифровую вычислительную систему и муль-
типлексный канал информационного обмена для организации взаимодей-
ствия бортового оборудования в интересах выполнения боевой задачи;
• комплекс радиоэлектронных и радиотехнических систем и средств (РЭК),
включающий бортовую радиолокационную станцию (БРЛС) или радио-
локационную систему управления (РЛСУ), систему радиоэлектронного
противодействия (РЭП) со станцией радиотехнической разведки (СРТР) и
станцией активных помех (САП), систему госопознавания (СГО), специ-
альные системы и средства информационного обмена по каналам "земля-
борт" и "борт-борт" на боевых режимах;
• комплекс информационных и прицельных оптико-электронных систем
(ОЭК), объединяющий системы и средства оптического и ИК-диапазонов;
• комплекс управления оружием (КУО), включающий систему управления
оружием (СУО), систему контроля авиационного вооружения, систему
подвески, загрузки и транспортирования, систему технического обслужи-
вания;
• системы комплекса пилотажного и навигационного оборудования (система
навигации, САУ и др.) в части, связанной с выполнением боевых задач;
• системы и установки вооружения.
Отдельно следует подчеркнуть основные функции бортовой автоматизи-
рованной системы управления как составной части СУВ:
• управление средствами бортового оборудования вооружения;
• создание информационно-управляющего поля кабины с использованием
обобщенной индикации, индикации боевых режимов и тактической об-
становки и многофункциональных пультов управления;
• решение задач обработки информации о целях, наведения и управления
самолетом при одиночных и групповых боевых действиях, выбора ин-
формационных каналов и систем противодействия;
• организация взаимодействия бортового оборудования в интересах выпол-
нения боевой задачи с помощью мультиплексных каналов обмена.
В перспективе расширенная СУВ, структура которой дана на рис. 3.4.5,
преобразуется в интегрированный комплекс бортового оборудования и воо-
ружения. Его центральным элементом, ядром, становится бортовая АСУ с
338
Радиоэлектронный комплекс
РЭК
Радиолокационная система управления
РЛСУ (БРЛС)
Спецвычислитель РЭК
Онтико-элекэроннын ОЭК
комплекс
Типовой ТКС
комплекс
связи
Командная КРУ
радиолиния
управления
Оптико- ОЛС
локационная
станция
Система государственного СГО
опознавания
Комплекс радиоэлектронного противодействия
Лазерный ЛД
дальномер
Сзанция СРТР
радиотех н и чес кой
разведки
Система САП
активных
помех
Нашлсмная НСЦ
система
целеуказания
ИК-система СП IT
прел у п режден и я
о пуске
Система АПП
сброса пассивных
помех
Спецвычисли гель ОЭК
Бортевая ' -АСУ-
Бортовая цифровая вычислительная система
БЦВС
Пилотажно-навигационный комплекс
ПНК
Комплекс управления оружием
СУО
Инсрциалыю-спутниковая
система навигации
иссн
Система свс
воздушных
chi налов
Радио- РВ
высото-
мер
Система СУО
управления
оружием
С истема КАВ
контроля
авиационного
вооружения
Система САУ
автомат ичсского
управления
Система сое
ограничений
самолет а
Система подвески, загрузки и
пзт
транспортировки
Навигационный спецвычислитель
Система опреде-
ления взаимных
координат ОВК
Л в на ци он ное вооружение класса
воздух - воздух”
РБД
РСД
РМД
Рис.3.4.5. Расширенное представление СУВ
БЦВС. математическое обеспечение которой решает весь спектр боевых задач
истребителя. Это ядро реализует функциональную интеграцию специального
бортового оборудования и вооружения, являясь информационно-управляю-
щей системой верхнего уровня.
339
22'
Бортовая АСУ перспективного многофункционального истребителя осу-
ществляет межсистемный информационный обмен с использованием магист-
ральных интерфейсов, обеспечивает взаимодействие летчика с индикацион-
ными средствами кабины путем отображения пилотажно-навигационной, об-
зорно-прицельной, тактической информации и путем управления режимами
работы бортового оборудования и вооружения. Именно с помощью бортовой
АСУ возможна реализация интегрированного управления огнем и маневром в
виде комплексной системы управления вооружением и полетом (см. п. 6.2.2).
В БЦВМ верхнего уровня, входящей в состав БЦВС бортовой АСУ, за-
кладывается специальное программное обеспечение, состоящее из ряда бло-
ков, в число которых входят: главная управляющая программа, диспетчеры
режимов, функциональное программное обеспечение, программы встроенно-
го контроля.
Функциональное программное обеспечение БЦВС представляет собой
программную реализацию алгоритмов боевого применения, т. е. основную
часть бортового интеллекта (см. подразд. 6.5). Боевое алгоритмическое обес-
печение разделяется на несколько групп и взаимодействует с бортовыми сис-
темами и информационно-управляющим полем кабины (рис. 3.4.6). Коротко
обозначим состав основных задач, решаемых алгоритмами боевого примене-
ния в режиме "воздух-воздух" [3.4, 3.6, 3.8-3.14].
1) Группа алгоритмов функционального комплексирования и принятия
решений:
• выбор информационных каналов, их режимов и организация взаимодей-
ствия;
• выбор средств вооружения;
• определение способов и условий проведения атаки;
• ранжирование целей и назначение на атаку;
• анализ боевых действий;
• распределение ресурсов и целераспределение в группе;
• организация группового взаимодействия (информационного, маневренно-
го, огневого);
• автоматическая реконфигурация бортовой СУВ в соответствии с техниче-
ским состоянием подсистем;
• имитация боевого применения авиационных средств поражения.
2) Группа алгоритмов формирования и обработки информации о внешней
обстановке:
• сглаживание измеряемых параметров;
• оценивание неизмеряемых координат;
• экстраполяция оцениваемых величин;
• помехозащита и восстановление информации;
• отождествление целей;
• комплексная обработка информации от разных источников;
• распределение по бортовым системам предполетной информации и про-
грамм полета.
3) Группа алгоритмов боевого управления самолетом:
• вывод истребителя в зону информационного контакта с целями для их
обнаружения и захвата;
340
V
Алгоритмы боевого применения СУВ
БРЛС
______I
Навигацион-
ная система
КРУ (БАН)
ОЛС (ТП)
---IPTP -
ТКС
Исполнительные системы
Информационные системы
Рис.3.4.6. Общая структура алгоритмов боевого применения
341
вывод истребителя в условия применения средств вооружения, в том чис-
ле при многоцелевой атаке и дуэльной ситуации;
наведение полуактивных и радиокорректируемых управляемых ракет;
траекторное обеспечение условий работы информационных систем;
оптимизация боевого маневрирования;
обеспечение безопасности истребителя на предельных режимах полета,
при огневом противодействии цели, при пролете пораженной цели;
построение боевых траекторий движения истребителя, в том числе при
полете строем;
формирование управляющих сигналов в систему автоматического управ-
ления (комплексную систему управления) и в систему отображения ин-
формации.
4) Группа алгоритмов обеспечения применения средств вооружения:
расчет условий разрешения пуска управляемых ракет;
формирование логики пуска по маневрирующим целям;
расчет полетных заданий и команд радиокоррекции траектории ракет;
формирование индикации условий применения средств вооружения;
определение условий стрельбы из пушки.
3.5. Система
траекторного управления истребителем
на этапе вывода в боевое соприкосновение
3.5.1. Управление самолетами МиГ-31 и Су-27
при наведении от внешних систем
Полет на перехват и управление истребителем
Управление истребителем-перехватчиком от внешних систем в общем
виде в 60-е годы предусматривало сложную процедуру переключений мето-
дов управления и участков полета в соответствии с разовыми и плавными
командами, передаваемыми на борт от пунктов наведения. Автоматизация
управления при дальнем наведении впервые реализована в бортовых систе-
мах перехватчика МиГ-31, для чего потребовалась привязка самой идеоло-
гии внешнего программного управления к конкретному авиационному ком-
плексу с учетом возможностей бортового цифрового вычислителя. Именно с
этой целью была создана логика взаимодействия бортовых систем с внеш-
ними АСУ, определены методы и особенности управления истребителем по
заданным программам и профилям полета. Основы этой идеологии с приме-
нением диспетчеризации режимов и законов управления использованы при
создании математического обеспечения всех последующих комплексов пе-
рехвата, включая Су-27, МиГ-31Б, МиГ-31М, Су-27М. Поэтому можно счи-
тать разработанные подходы и технические решения типовыми, отвечаю-
щими всем требованиям режимов программного управления при дальнем
наведении; они могут быть рекомендованы к применению и на перспектив-
ных авиационных комплексах перехвата.
Боевое применение истребителей МиГ-31 и Су-27 при выходе в сопри-
косновение с целью основывается на использовании профилей, программ,
участков и маневров, характерных для наведения в современных АСУ. В со-
ответствии с принятой в настоящее время тактикой перехвата полет истреби-
теля по траектории наведения разделяется на два программных участка.
Первый - движение с набором высоты (рис. 3.5.1) и разгоном до про-
граммной скорости, задаваемой АСУ. При этом режим работы двигателей и
закон изменения скорости в функции высоты полета заданы. Профиль поле-
та определяется программой набора высоты и скорости, а также перегрузка-
ми, возникающими при выполнении команд наведения по курсу. Движение
в вертикальной плоскости не зависит от положения цели по высоте, и истре-
343
битель при большом времени наведения успевает выйти на высоту, близкую
к потолку, определяемую текущей массой самолета и наличием крена в
развороте.
Рис 3.5.1. В программном наборе высоты вертикальная скорость
перехватчика МиГ-31 достигает 140. ..160 м/с
Второй - участок выхода на высоту атаки цели, состоящий из программно-
го движения к конечным параметрам Нк, Мк по заданной программе М=Мпр(Н)
с одновременным выполнением курсовых команд. Начало этого участка опре-
деляется выработкой команды "Вертикаль", формируемой при командном на-
ведении в АСУ, а при бортовом управлении - на борту (реализовано в Су-27).
С точки зрения управления истребителем, применяемые методы наведе-
ния характеризуются наличием нескольких разворотов по курсу, обычно со-
вершаемых с радиусами, соответствующими у = 45...50°. В случае маневри-
рующей цели истребитель по командам АСУ может разворачиваться с радиу-
сами, соответствующими у = 60...70°, в зависимости от вида вертикального
маневра. Развороты эти могут осуществляются при наборе высоты и скоро-
сти, при полете на потолке и в процессе снижения на высоту атаки.
Управление истребителем при дальнем наведении реализуется с помо-
щью бортовой системы автоматического управления. На вход в вычислитель
САУ подаются управляющие команды в виде заданного курса, высоты, ско-
рости; они поступают в режиме командного наведения от аппаратуры радио-
линии управления (КРУ). По этим командам цифровой вычислитель траек-
торного управления формирует заданные сигналы по перегрузке и крену, от-
рабатываемые автопилотной частью системы управления. В соответствии с
управляющими и разовыми командами истребитель осуществляет маневры в
вертикальной и горизонтальной плоскостях на участках набора высоты и раз-
гона, снижения, перенацеливания и смены программ. Конечной целью управ-
ления перехватчиком при дальнем наведении является выход в заданные ус-
ловия атаки по высоте, скорости и курсу с использованием программных ре-
жимов полета.
344
б
Рис. 3.5.2. Программы набора высоты и разгона истребителей МиГ-31 (а) и Су-27 (б)
345
При наведении истребителей МиГ-31 и Су-27 от внешних систем исполь-
зуются режимы полета по потолкам, движение самолета в вертикальной плос-
кости при сближении с целью происходит по программе. В этом случае оно
выполняется не на высоте последующей атаки, а на высотах, близких к потол-
ку, с выходом на высоту атаки лишь на заключительном этапе наведения. Про-
грамма (профиль) полета на перехват в вертикальной плоскости определяется:
• базовой программой набора высоты и скорости Мпрна6 (Н);
• режимом работы двигателей и моментом включения форсажа;
• значением программной скорости VN , при достижении которой произво-
дится сход с базовой программы и выполнение набора высоты при V=VN
или М = MN;
• программой снижения на конечную высоту атаки Нк, выполняемой по
команде "Вертикаль" и реализуемой в виде зависимости Мпрсн (Н).
Базовая программа набора обеспечивает быстрый и экономичный подъем
полной энергии. По своим показателям она близка к оптимальным програм-
мам, но более проста в реализации и удобна для контроля летчиком, так как
состоит из участков с постоянными значениями VHCT, М, Н, Уцр.
По режиму работы двигателей программы разделяются на три вида: фор-
сажные, комбинированные и бесфорсажные (крейсерские). При использова-
нии форсажных программ, обеспечивающих максимальную среднюю ско-
рость полета на перехват, команда на включение форсажа поступает на борт
самолета сразу при его входе в поле внешних команд; полет до получения ко-
манды "Вертикаль" производится на полностью форсажном режиме работы
двигателей. При крейсерских программах, обеспечивающих минимальный
средний километровый расход топлива, после выполнения взлета режим фор-
сажа выключается и дозвуковой набор высоты осуществляется при макси-
мальном режиме работы двигателей; затем выполняется участок крейсерского
полета при Н = Нкр и М=Мкр Команда "Форсаж" подается в случае сверхзву-
ковой величины конечной скорости VK в тот момент, когда время до оконча-
ния наведения становится равным времени, потребному для набора скорости
и достижения высоты атаки. В комбинированных программах команда на
включение форсажа вырабатывается АСУ либо в момент выхода самолета на
Нкр, либо в любой момент времени, начиная от взлета и кончая предельно
поздним включением форсажа, соответствующим крейсерским программам
(подробнее см. п. 4.2.2).
На рис. 3.5.2 приведены программы набора высоты и разгона, реализо-
ванные на борту истребителей МиГ-31 и Су-27. В случае перехвата в перед-
нюю полусферу высотно-скоростной цели профиль полета истребителя обыч-
но состоит из таких участков:
• оптимальный по времени набор высоты и разгон до сверхзвуковой крей-
серской скорости MKpCJ , набор высоты статического потолка на этой ско-
рости в режиме "Полный форсаж" ("ПФ");
• полет на высоте потолка при "Полном форсаже" на скорости Мкрсз;
• снижение на высоту атаки цели Нк в режиме работы двигателей "Макси-
мал" ("МАХ") или "Частичный форсаж";
• атака цели с возможным отворотом от нее с максимальным креном на
"Полном форсаже";
346
• торможение в горизонтальном полете и разворот для возвращения до дос-
тижения скорости Vnp min при минимальном режиме работы двигателей
("МГ");
• снижение до высоты крейсерского полета Нкр при выдерживании Vnp mjn
на дросселированных бесфорсажных режимах двигателей;
• возврат на аэродром посадки с дозвуковой крейсерской скоростью Мкр и
планирование для захода на посадку.
На рис 3.5.3 показан пример профиля полета на перехват скоростной вы-
соколетящей цели истребителя МиГ-31, где отмечены участки программы
движения и указаны характерные точки: 1 (Н = 10 км, Vnp= 1150 км/ч); 2 (Н =
= 20 км, М = 2,35); 3 (Н = 20,5...21 км, М = 2,35); 4 (Н = 18 км, М = 2,35);
5 (Н = 19...21 км, М= 1,9...2,3); 6 (Н = II км, М = 0,85...0,9).
Рис. 3.5.3. Профиль полета истребителя МиГ-31 на перехват скоростной высоколетящей цели
При перехвате из задней полусферы высотной цели профиль полета от-
личается от рассмотренного наличием участков разворота для выхода под за-
данный угол встречи (в процессе набора высоты, на потолке или при сниже-
нии) и разгона до Vmax с последующей атакой цели.
Перехват маловысотных целей осуществляется с высот Н = 3...5 км,
обеспечивающих наилучшие условия обнаружения и атаки низколетящих це-
лей. При этом профиль полета на перехват может быть трех видов: с баланс-
ным участком на дозвуковом крейсерском режиме (задача наведения — даль-
ний перехват), с балансным участком на сверхзвуковом крейсерском режиме
(ближний перехват) и с двумя балансными участками (на дозвуковой и сверх-
звуковой скоростях).
В управлении истребителем при выполнении им боевого задания задейст-
вован целый ряд как внешних (наземная или воздушная АСУ), так и бортовых
систем, входящих в состав комплекса бортового оборудования.
347
На примере самолета Су-27 можно отметить, что управление истребите-
лем при полете на перехват реализуется с использованием (рис. 3.5.4):
• наземной автоматизированной системы (НАСУ);
• командной радиолинии управления (КРУ);
• цифрового вычислителя траекторного управления (ЦВТУ);
• бортовой вычислительной машины системы управления вооружением
(БЦВМ СУВ);
• автопилотной части САУ (АП) и системы дистанционного управления
(СДУ);
• системы единой индикации.
Рис. 3.5.4. Блок-схема управления истребителем при полете на перехват
Обеспечение режимов автоматизированного управления в задачах пере-
хвата воздушных целей осуществляется с помощью следующих бортовых
систем:
• в командном наведении: КРУ, ЦВТУ, АП, СДУ;
• в бортовом наведении и бортовом поиске: КРУ, БЦВМ СУВ, ЦВТУ, АП,
СДУ;
• в самонаведении: БЦВМ СУВ, АП, СДУ.
Алгоритмы управления истребителем по высоте и скорости
Программная траектория полета истребителя в вертикальной плоскости на
этапах дальнего наведения состоит из участков со стабилизацией заданного
числа М, высоты полета Н, управления по скорости и высоте. В соответствии с
этим управление истребителем обеспечивается траекторными контурами
(управления по заданной высоте и по заданному числу М^, управляющими сиг-
налами в которых являются избыточные перегрузки пвн и пв . Сами управ-
ляющие сигналы формируются с использованием методов аналитического кон-
струирования исходя из минимизации квадратичных функционалов вида
Ц =f (К|АН2 + Any2) dt и/2= J (к2АМ2+ Any2) dt,
о о
348
характеризующих ошибки выполнения программы по высоте 1\ и скорости /2
с учетом колебательности процесса по перегрузке. Общая структура закона
управления имеет вид:
Пв" = - 1ди (н - Н.,ал) - ieH Sin 6;
(3.5.1)
nBM = 1дм (М - Мзад) + inx (Пх„ ~ Ком sin 6),
где 1дц, i0H , 1дм, inx, Ком - коэффициенты усиления и передаточные числа; Нид
и М.^ - заданные (программные) значения высоты и числа М; 0 - угол накло-
на траектории; пхп - продольная перегрузка в поточной системе координат.
Созданные законы управления самолетом по скорости и высоте и условия
их переключения легли в основу алгоритмического обеспечения программно-
го управления дальним перехватчиком МиГ-31, реализованного в цифровом
вычислителе САУ.
Структура алгоритмов системы программного управления истребителем в
вертикальной плоскости включает такие элементы:
• законы управления самолетом;
• формирование и обработка заданных команд по скорости и высоте;
• ограничение управляющих и промежуточных параметров движения;
• формирование управляющих сигналов по перегрузке и крену.
Учитывая новизну разработанного алгоритмического обеспечения, отме-
тим основные технические достижения и особенности полученных алгорит-
мов и способов решения задач управления перехватчиком.
Законы управления самолетом в вертикальной плоскости, сформирован-
ные на основе (3.5.1), обеспечивают "вписывание" в программы набора высо-
ты и скорости, выполнение этих программ и их смену, снижение по командам
"Вертикаль", а также выполнение других маневров по высоте и скорости.
Типовая структура алгоритмов управления содержит:
1) Закон управления по высоте в режимах схода на заданную высоту и
стабилизации Нзад:
Пв" =1дн (Нзал - Н) - FH (0) + Апв.
(3.5.2)
Здесь выражение FH(0) есть нелинейная функция вычисляемого угла наклона
траектории 0 в виде
Fh(0) =
к2 0 при 0 < 0j;
к2 1010 + к3 0 при 0( <0<02;
к4 0 при 101 > 02,
где kt..-кд, 0|, 02 - константы, выбираемые путем моделирования, определяю-
щие качество отработки системой заданных значений Нзад при больших рассо-
гласованиях по высоте и в условиях полета с большими углами крена. Эта
коррекция в виде функции FH(0) делает закон субоптимальным нелинейным
законом управления самолетом. Введение нелинейной стабилизирующей свя-
зи по углу наклона траектории обеспечивает плавный и близкий к оптималь-
ному по времени выход на режим стабилизации высоты после подъема или
349
снижения. Для создания упреждения при выходе на режим стабилизации вы-
соты за минимальное время требуется большой коэффициент усиления по уг-
лу наклона, а после уменьшения этого угла и достижения заданной высоты
необходимо снизить коэффициент усиления для обеспечения устойчивости
контура. В нелинейном законе управления повышается доля демпфирующей
составляющей при больших углах наклона и уменьшается при малых углах.
Для компенсации статической ошибки по высоте, возникающей на дозвуко-
вых режимах полета, а также в случае неточности вычисления значения 6 в
закон управления пвн вводится при М < 1 корректирующая поправка в виде
Апв = k5 Н + к6 М + к7.
2) Закон управления по скорости полета в режимах управления по числу
М и стабилизации Мза;1:
ПвМ = кдм (М - Мзад) - к0 (6 + 80) + кпх (пх* + 8пх). (3.5.3)
Здесь используется величина продольной перегрузки в поточной (траекторной)
системе координат самолета пх = пхлатч- апу. Введение корректирующих со-
ставляющих S6 в угле наклона и 8пх в продольной перегрузке устраняет корот-
копериодические колебания самолета в продольной плоскости, которые возни-
кают вследствие образования дополнительной обратной связи по нормальной
перегрузке относительно контура автопилота. Этим достигается и уменьшение
времени набора высоты и снижения, а также расхода топлива.
3) Закон управления по скорости снижения Vy при вертикальных ма-
неврах по команде "Вертикаль" для выхода на заданные высоты:
nBVy = KVy (Vy зад - Vy) + FVy (AM). (3.5.4)
Здесь AM = M - Мзад - ошибка в выполнении программы снижения по скоро-
сти полета. Поправка FVy (AM) формирует сигнал штрафного управления уг-
лом наклона при выходе ошибки по скорости за заданные пределы:
при AM < -AM i;
при AM i < AM < AM 2;
при AM > AM 2
Fvy(AM) =
n[AM + n2
0
n3AM + n4
Здесь П1...П4 - константы; AMi, AM2 - отрицательный и положительный поро-
ги по ошибке AM, определяющие действие штрафа. Закон управления (3.5.4)
обеспечивает выдерживание программы полета с управлением темпом сни-
жения (заданной скоростью снижения УУзад = f (Н)).
4) Выбор и ограничение управляющих сигналов по вертикальной пере-
грузке в режиме разгона самолета со снижением:
nB = max (пвн, пвм, nBVym);
Пв зал = Folp (ПВ).
Здесь управляющие сигналы пвн и пвм вычисляются в соответствии с (3.5.2),
(3.5.3), а величина nBVym = KVy (Vy max- Vy) обеспечивает снижение с макси-
мально допустимой вертикальной скоростью Vy max. Ограничение Forp (nB) по
управляющему сигналу перегрузки, поступающему для отработки на вход ав-
топилотной части САУ, вызвано требованиями обеспечения динамических
характеристик контура управления. Ограничение это является несимметрич-
350
ным (его пределы пв тш и пв тах) с переменным верхним уровнем nB т;1Х, позво-
ляющим расширить диапазон управляющего сигнала по перегрузке до макси-
мально допустимой величины при подходе к одной из границ условий поле-
та - по минимальной высоте Hmiri или максимальной скорости Мтах:
п0
nBmax=1no+a« +т
по+аи
при т<-аи;
при -а„ <т< 0;
при т>0,
где п0 - начальный (штатный) уровень ограничителя; ап - величина дополни-
тельного расширения верхнего уровня ограничителя перегрузки Forp; m = max
[кдн (Hmin - Н); Кдм (М - Мтах)]; Кдн, КдМ- константы. Закон управления (3.5.5)
позволяет осуществлять вертикальный маневр разгона со снижением и обес-
печивает ускоренный вывод самолета из опасной ситуации при выдержива-
нии ограничений по Mmax, Hmin, Vymax.
5) Закон управления при вписывании в программу набора высоты
nBBn = Kvi Vy3O-KH V sin 6. (3.5.6)
Здесь ограниченная величина заданной вертикальной скорости равна
Vy.lo= min [Уузад,Ууогр],
где Vy тал = kv? V (НВв - Н) - заданная вертикальная скорость; kv1, kv2, кв
и Ууогр - константы; НВв = max [HminBB, Н] - высота ввода в программу, т. е.
текущая высота вписывания, ограниченная снизу постоянной минимальной
высотой ввода Н,™пВв. Закон управления (3.5.6) сразу после взлета истребителя
выводит его на минимальную высоту вписывания с выдерживанием огра-
ничения по углу кабрирования (вертикальной скорости) для исключения
резких перекладок рулей и торможения самолета. При этом происходит плав-
ный выход на высоту HnlinBB и ее стабилизация при разгоне до ввода в про-
грамму набора высоты; переход на набор высоты осуществляется по условию
пвм > пвВп. В случае включения САУ на высотах Н > HmjnBB самолет приводит-
ся к горизонтальному полету с последующим переходом в набор высоты по
тому же условию. Моделирование и летные испытания показали, что система
управления перехватчиком с использованием закона (3.5.6) позволяет обеспе-
чить возможность включения автоматики на земле (на старте) или в любой
момент полета, улучшить переходный процесс вывода в набор высоты, повы-
сить безопасность при автоматизации взлета самолета.
Потребные величины скорости и высоты, входящие в качестве заданных
команд в законы управления перехватчиком (3.5.2) (3.5.6), формируются в
алгоритмах цифрового вычислителя САУ из управляющих сигналов про-
граммной VN или конечной VK скорости и высоты цели Нц, поступающих из
бортовой аппаратуры командной радиолинии КРУ. Величины Мзад и Нзад вы-
числяются в результате специальной обработки и преобразований этих вход-
ных команд.
При программном управлении в режимах внешнего (дальнего) наведения
величина Мзад в соответствии с логикой выбора участков программ и законов
управления может принимать следующие значения: MN - программное число
М; Мк-конечное число М (скорость атаки цели); Мо- число М полета в мо-
351
мент поступления признака "Вертикаль"; Мпр(1) (Н) программа дозвукового
набора высоты до выхода на высоту разгона Нр; Мпр<2) (Н) - программа сверх-
звукового набора высоты и снижения, близкая к Vnpmaxi Мпр(3)(Н) - программа
снижения, соответствующая Vnpmin(cM. рис. 3.5.2).
Программное значение MN образуется до поступления команды "Верти-
каль" в соответствии с величиной VN из ограниченного ряда программных
значений скорости (рис. 3.5.2); значение Мк вычисляется по входной команде
VK конечной скорости: Мквх = VK/ а.1В (Нк).
Конечная высота Нк , являющаяся начальной высотой атаки цели, - важ-
ный параметр наведения, во многом определяющий боевые возможности
комплекса перехвата. Вид зависимости Нк (Нц) выбирается исходя из ожи-
даемых характеристик БРЛС и вооружения, а также из возможностей дости-
жения самолетом конечных условий. В соответствии с применяемой в на-
стоящее время идеологией перехвата с атакой сверху истребитель выводится
с превышением относительно цели; это, с одной стороны, позволяет ему раз-
гоняться до больших скоростей, чем цель, т. е. иметь преимущество в удель-
ной энергии, а с другой стороны, приводит к уменьшению расхода топлива
и росту рубежа перехвата. Обычно функция Нк = f (Нц), реализуемая в вычис-
лителе САУ, включает ряд опорных высот, наилучших по условиям атаки це-
ли, с линейными участками перехода с одной опорной высоты на другую.
В ряде случаев дальнего наведения, например при малом запасе топлива на
борту или при разнесении самолетов пары (группы) по высоте относительно
цели, возникает необходимость вывода истребителя ниже цели. Для таких
ситуаций в бортовом алгоритме предусматривается перестройка зависимости
Нк от Нц по командам "Атака сверху" ("Вертикаль-3") или "Атака снизу"
("Вертикаль-1").
Величина Мк, по которой назначается заданная скорость Мшд в законе
управления (3.5.3), формируется по таким логическим зависимостям:
• в режимах "Вертикаль-1 или -3" Мк = min [Мквх, М||р<2)(Нк)];
• в режиме "Вертикаль-2" Мк = max [Мквх, М„р<3) (Нк)].
В случае рассогласования между старым и новым значениями Мк, пре-
вышающего заданную зону (|Мк“ов-Мкстар| > АМ3), производится переопреде-
ление программы движения самолета.
В наборах высоты, осуществляемых обычно при фиксированном положе-
нии ручки управления двигателем (например, на "Полном форсаже" или на
"Максимале"), решающее значение для управления по заданным программам
имеет управление по скорости и высоте полета с использованием руля высо-
ты. Для этого и предназначены законы управления нормальной перегрузкой,
рассмотренные выше.
На участках снижения истребителя на высоту атаки необходимо управ-
лять не только перегрузкой, но и тягой. При этом в общем случае в оба канала
управления должны поступать ошибки по скорости полета и по углу наклона
(скорости снижения).
В случае отсутствия автомата тяги в составе бортового оборудования ис-
требителей МиГ-31 и Су-27 автоматизация процесса снижения производится
с применением директорного способа управления сектором газа летчиком.
352
В такой постановке удобным оказалось разделение системы управления сни-
жением на два контура: выдерживание программы по скорости полета осуще-
ствляется рулем высоты (вертикальной перегрузкой пв), а положение сектора
газа определяет скорость снижения Vy .
При управлении тягой двигателей по ошибке AVy = Vy зал - Vy подключе-
ние летчика в замкнутый контур регулирования требует от него слишком
много внимания для пилотирования. Выдерживание заданного значения вер-
тикальной скорости Vy зад существенно облегчается, если управление двигате-
лем производить с учетом отклонения текущего значения продольной пере-
грузки пх от заданного значения пх зад.
Программная величина продольной перегрузки, определяемая с учетом
программ снижения Мпрсн (Н), записывается в виде
Пх чад
dMnP азв + da3B М + 1
dH g dH g азвМ
vy= кмме.
Поскольку ограничение на скорость снижения учтено в величине угла на-
клона 6min, получим пх зад < Ком 6min- Алгоритм директорного управления сек-
тором газа на участках снижения имеет вид
5с. М = mcrM (К0 м emin - пх ) \УФ,
где тсгм - масштабный коэффициент отклонения директорной метки 8cr; W(|, -
корректирующий фильтр.
После перехода в режим стабилизации высоты при выполнении програм-
мы полета (выход на высоту разгона Нр, сход на заданную конечную высоту
Нк) в рассматриваемой системе с разделенными каналами управления задачи
каждого канала меняются: вертикальной перегрузкой обеспечивается выдер-
живание высоты, сектором газа- стабилизация заданной скорости полета
(числа М). Управление тягой в этом режиме при директорном способе пило-
тирования выполняется по отклонению скорости полета от заданного значе-
ния и производной этой ошибки. Для режима стабилизации высоты можно
принять 6 ~ 0 и d AM / dt = — nx g / a.JB; коэффициент при производной выби-
рается исходя из обеспечения апериодических процессов регулирования.
Синтезированный алгоритм директорного управления сектором газа при ста-
билизации высоты имеет следующую структуру:
8ciH = mcrH [кдмС1 (Мзад - М) - кпхсг nx] W(1,.
Переключение законов управления перегрузкой пвм, пвн и сектором газа
8СГМ, Sei" осуществляется по специальной логике, реализованной в бортовом
вычислителе САУ (ЦВТУ). При автоматическом переходе между участками
программ полета (см. рис. 3.5.2) выбор закона управления перегрузкой сво-
дится к применению логических условий "минимум" и "максимум"; так, на-
пример, при снижении по команде "Вертикаль-1" или "Вертикаль-3" для вы-
полнения программы с участками выдерживания величин Мо, М2 = М,1р(2) (Нк),
Мк, Нк закон управления по вертикальной перегрузке запишется в виде
пВзад = max {nBM2, min [пвМк, max (пвМк, пвМо)]}.
23 - 4094
353
3.5.2. Цифровой вычислитель траекторного управления,
его функции и особенности
Зачем нужен и что решает цифровой вычислитель
траекторного управления
В соответствии с логикой взаимодействия бортового оборудования пере-
хватчика с наземной АСУ на этапе командного наведения производится вы-
бор программ и профилей полета, вида боевых маневров и законов управле-
ния на каждом из них, рассчитываются необходимые моменты переключений
участков программ, определяется режим работы силовой установки, форми-
руются управляющие, командные и информационные сигналы, поступающие
в автопилот и на индикаторы. Все перечисленные операции, а также ряд дру-
гих логических функций при управлении в режиме командного наведения пе-
рехватчика МиГ-31 выполняет цифровой вычислитель траекторного управле-
ния ЦВТУ системы автоматического управления САУ-155МП (разработчик
МНПК "Авионика", главный конструктор Петров В.М.).
Необходимость использования цифрового вычислителя в составе САУ
была вызвана следующими факторами:
• сложностью алгоритмов управления по высоте, скорости, курсу, сектору
газа, в состав которых входят тригонометрические и обратные функции,
полиномы от высоты и числа М, блоки произведения и деления, пере-
страиваемые коэффициенты, логические фильтры, запоминающие уст-
ройства, ограничители и другие элементы;
• большим количеством логических операций, связанных с переключения-
ми участков программ в соответствии с поступающими от наземной АСУ
командами, а также операций сравнения и выбора закона управления;
• сложностью логики приоритета сигналов и взаимодействия с наборами
команд системы радиоуправления КРУ, предусматривающей запомина-
ние некоторых команд, переключение с одного режима на другой;
• требованиями высокой точности вычислений при формировании заданных
траекторных параметров и управляющих сигналов, необходимостью обес-
печения большой точности выполнения заданных программ полета и ко-
нечных координат, которые привели к реализации ряда необходимых ме-
тодов повышения точности управления и стабилизации конечных условий;
• повышенными требованиями по помехозащищенности алгоритмов и ап-
паратуры, которые обусловили применение специальных мер защиты от
флюктуаций, сбоев, ложных сигналов, шумов датчиков и преобразовате-
лей и т. д.;
• многорежимностью всей системы автоматического управления перехват-
чиком на этапах командного наведения, необходимостью переключения
структуры управления в соответствии с выбранным режимом.
В ограниченном объеме задачи управления самолетом при наземном (ко-
мандном) наведении решались с помощью аналоговых вычислителей САУ па
истребителях-перехватчиках Су-15, МиГ-25, МиГ-23. Цифровая реализация ал-
354
горитмов и логики управления при наведении, впервые примененная в САУ
перехватчика МиГ-31, дала возможность выполнить в полном объеме логику
взаимодействия с наземными АСУ, использовать достаточно совершенные за-
коны управления, удовлетворить все требования этапа командного наведения.
С помощью цифрового вычислителя САУ на борту истребителей
МиГ-31 и Су-27 решаются следующие задачи:
• реализация логики приоритета команд, поступающих при ручном (от за-
датчика) или автоматическом (от КРУ в МиГ-31, от КРУ и СУВ в Су-27)
вводе этих команд;
• выполнение логики выбора вида маневра по высоте и скорости, перехода
между участками в соответствии с профилем полета и режимом работы,
определяемыми входными командами;
• автоматизация управления истребителем при программном наборе высо-
ты, снижении, смене программ с высокой точностью выхода и стабилиза-
ции конечных координат самолета;
• автоматизация управления сектором газа и тормозными щитками на уча-
стках снижения, торможения, разгона;
• согласование каналов управления и рациональное распределение пере-
грузки между каналами при пространственных маневрах;
• обеспечение безопасности полета при выполнении всех видов боевых ма-
невров с сохранением решения задач наведения.
Логика приоритета команд от КРУ заключается в назначении следующих
режимов работы ЦВТУ:
• "Привод"- при поступлении разовых команд Т ("Привод") или В-2
("Вертикаль-2");
• "Вертикаль"- при поступлении команд В-1 ("Вертикаль-1") или В-3
("Вертикаль-3");
• "Набор" - при поступлении команды "Перенацеливание" или отсутствии
команд В-1, В-2, В-3, Т ;
• "Стабилизация" - при VK < V,< min и отсутствии разовых команд.
На рис. 3.5.5 показаны траектории выхода самолета на конечную высоту
Нк (высоту атаки Н;1) и конечную скорость VK или Мк в соответствии с внеш-
ними командами Т, В-1, В-2, В-3.
Рис. 3.5.5. Траектории движения самолета по командам "Вертикаль" (В-1, В-2, В-3) 355
и"Привод"(Т)
В основе алгоритмического обеспечения ЦВТУ лежат специально разра-
ботанные законы управления самолетом (см. п. 3.5.1) и логика переключений
между участками программ с назначением на каждом участке необходимого
управления.
С учетом цифровой реализации и логики управления при создании ЦВТУ
был принят ряд мер по обеспечению безопасности и помехозащищенности.
В частности, для безопасного выполнения вертикальных маневров разгона со
снижением ("горка вниз") и торможения с набором высоты ("горка вверх")
введены такие меры:
• плавное вписывание в программу сверхзвукового набора Mnp(2> (Н) с по-
мощью введения в закон управления пвм заданного сигнала Мзад = min
[Мк; Мпр(Н)];
• недопущение снижения в процессе маневра ниже высоты Hmjn путем
обеспечения схода на эту высоту и ее стабилизации, как только сработает
условие переключения закона управления пв > пВзад, где Нзад = Нт1П;
• расширение маневренных возможностей самолета при приближении к
максимальной границе по скорости Vnpmax или Мтах путем снятия ограни-
чения максимальной перегрузки nBmax;
• обеспечение выдерживания предельных скоростей полета даже в случае
ошибочного перемещения летчиком сектора газа (РУД); например, если в
процессе снижения РУД будет поставлен в положение полного форсажа,
то самолет перейдет в набор высоты и не превысит Vnpmax или Мтах;
• при выполнении маневра торможения с набором высоты реализация
плавного перехода в режим снижения или горизонтального полета со ста-
билизацией Vnpmin или Мпр(2)(Н); это происходит в случае, если в процес-
се маневра выполняется условие переключения законов управления
пв _ ПВ зад, где Мзад Мир (Н).
Отметим также некоторые меры обеспечения помехоустойчивости, реа-
лизованные в ЦВТУ:
• статистическая обработка управляющих сигналов, фильтрация перегру-
зок, ослабление шумов КРУ и сбоев питания;
• автоматическое подключение корректоров СВС, использование признака
"готовность";
• применение логического фильтра по сигналу узад, ограничений величины
Лузад, приращений Дпв, Дпг, сигналов СВС; ограничение и фильтрация
конечных параметров Мк, Нк, а также Нц;
• введение условий переключений: двухкратные просчеты, блокировка по
условию "ДА", усреднение измерений.
Логика выбора маневров, программ и законов управления самолетом
при дальнем наведении
В зависимости от соотношения между начальным и конечным состоя-
ниями перехватчик выполняет ряд типовых маневров в вертикальной плоско-
сти (совмещаемых также с горизонтальными маневрами выхода на курс \|/-ид):
356
• набор высоты и скорости по программам Мир(|) (Н), М|1р(2> (Н) в режиме
"Набор"; эти маневры проводятся на режиме работы двигателей "Полный
форсаж" или "Максимал";
• снижение на конечную высоту Нк с выдерживанием постоянного числа
М, а также М = MIIp<4) (Н) при одновременном дросселировании двигате-
лей и с выдерживанием заданной скорости снижения Vy или угла наклона
траектории 6 - при поступлении команд В-1 или В-3;
• торможение со стабилизацией высоты до выхода к заданной скорости Мк
осуществляется по командам В-1, В-3 (стабилизация Нк) и В-2, Т (стаби-
лизация Но) при переводе летчиком сектора газа в минимальный режим;
• разгон со снижением по команде В-1 или В-3 при Мк > Мо;
• стабилизация начальных координат Мо и Но, если при выдаче одной из
команд В-1, В-2, В-3 плавная команда Узад (Мк) не приходит, пропадает
или если Мк < Mmin.
Особенности логики перехода из начального положения Но, Мо в конечное
Нк, Мк проиллюстрированы на рис.3.5.6, где показаны виды маневров самолета
по высоте и скорости в двух основных режимах ("Вертикаль" и "Набор").
Рис. 3.5.6. Выход истребителя на программные скорости MN и в конечные условия Нк, Мк
по командам "Вертикаль" (В-1. В-3)
Логика переключения законов управления по высоте пвн, по скорости пвм,
по вертикальной скорости nBVy, описанных в п. 3.5.1 и используемых на раз-
личных участках программ полета, основана на анализе следующих условий:
а) реализуется переход на пв”, если на последующем участке осуществля-
ется стабилизация Нзад, при пвн < пВзад, если Н.!ал > Нтск; пвн > пВзад, если
Надя < Нтск,
б) реализуется переход на пвм, если на последующем участке осуществ-
ляется отработка величины Мзад, при пвм > пВзад, если Мзад > М1СК; пв < пВзад,
если Мзал < Мтек,
в) реализуется переход на nBVy, если на последующем участке произво-
дится снижение с отработкой величины Vy, при nBVy < пВзад.
В указанных условиях пВзал обозначает текущий заданный управляющий
сигнал вертикальной перегрузки, представляющий собой одну из величин пв ,
Пвм или nBVy на текущем участке полета.
357
Вычислитель ЦВТУ в соответствии с заложенной логикой обеспечивает
автоматический выбор режима работы, закона управления пВзад в продольном
канале, заданных величин Нзад, Мзал в этом законе управления, разовых команд
управления сектором газа для индикации летчику, законов управления тягой и
директорных сигналов управления РУД при снижениях и торможениях.
Программный полет перехватчика и процессы управления
при маневрировании
Описанная логика и алгоритмы управления самолетом на этапах дальнею
наведения прошли тщательную проверку и отработку на математических мо-
делях и полунатурных комплексах на базе ГосНИИАС, а также при летных
испытаниях перехватчика МиГ-31 и несколько позже истребителя Су-27 на
базе ГНИКИ ВВС в г. Ахтубинске. Для оценки динамических характеристик
процессов управления истребителем было рассмотрено большое число типо-
вых ситуаций по начальным и конечным параметрам, по видам маневров са-
молета, по режимам и участкам полета в соответствии с командами, посту-
пающими от НАСУ. Отметим коротко некоторые результаты анализа траек-
торий и процессов управления при командном наведении МиГ-31.
Набор высоты по базовой программе и выходы на программные значе-
ния MN. На рис 3.5.7 показан пример выполнения программ набора высоты в
режиме "Полный форсаж" и даны характеристики движения самолета по раз-
личным участкам программ (время, расход топлива, высота статического по-
толка, точки схода на программные скорости MN). Вход в программу дозву-
кового набора высоты МПр(|) происходит при стабилизации начальной высоты
полета (при Н > 2 км) или с небольшим подъемом при Н < 2 км, исключается
Рис. 3.5.7. Характеристики наборов высоты по базовой программе самолета МиГ-31
358
потеря высоты до "захвата" программы. Выход на высоту разгона НР и стаби-
лизация этой высоты осуществляются плавно с высокой точностью
(АН = 50... 100 м). Переходы на программные скорости MN проходят без пе-
ререгулирования по числу М и без просадки по высоте. Развороты при про-
граммном наборе высоты не приводят к ухудшению процессов в вертикаль-
ной плоскости. Развороты на потолке сопровождаются длиннопериодически-
ми колебаниями по скорости и высоте, что объясняется ограниченными
располагаемыми перегрузками пх и пу самолета. Точность выдерживания про-
граммных скоростей при наборе высоты составляет AM = 0,02...0,04.
Снижение по командам "Вертикаль" (В-1 или В-3). После выполнения ус-
ловия приведения к горизонту ЦВТУ запоминает значение текущего числа М,
выдает разовую команду для подключения корректора скорости из СВС и ста-
билизирует число М полета. При приведении к горизонту индицируется разо-
вая команда управления двигателем и директорная метка сектора газа, форми-
руемая по закону 8С|Н, т. е. стабилизируется запомненное значение М. После
подключения корректора скорости индицируется команда "Максимал" или
"Малый газ", если позволяет ограничение. Директорная метка сектора газа от-
клоняется по закону 8С|М и обеспечивает выдерживание заданной скорости
снижения. Уменьшение высоты полета со стабилизацией начальной скорости
протекает плавно, без резких переключений и колебаний по текущим коорди-
натам; участок снижения по программе Мпр(4) вблизи ограничения V|IP ,тах ха-
рактеризуется колебаниями по пу и 0 с допустимыми параметрами. При сниже-
ниях с разворотом с высот потолка Нц, сопровождаемых глубоким креном
у = 60...65 , возможна потеря скорости. На высотах менее 15 км при тех же
кренах в развороте не происходит отхода от программы снижения.
Особые ситуации полета перехватчика. Отметим некоторые особенности
поведения самолета в автоматическом режиме управления от ЦВТУ при не-
типичных ситуациях полета (неправильных действиях летчика по перемеще-
нию РУД, отказах, ошибочных командах, пропадании информации), которые
были оценены в процессе моделирования и летных испытаний:
• в случае прихода команды "Вертикаль" при наборе высоты или полете на
потолке, если летчик не отключил форсаж, самолет продолжает полет со
стабилизацией текущего числа М;
• если команда "Вертикаль" поступила при промежуточном положении
РУД (например, при стабилизации высоты или скорости, при снижении
или при неправильном управлении сектором газа), самолет начинает
снижаться или набирать высоту, не выходя за пределы VllPmax и VnPmin, и
достигает высоты, соответствующей положению РУД;
• если после выхода на высоту Нк с разгоном со снижением летчик включил
режим "Форсаж", то самолет после схода на Мк будет набирать высоту;
• включение режима автоматического управления до полной балансировки
рулей при входе в программу Мпр(1) на высотах Н < 5 км в случае больших
отрицательных значений начального отклонения стабилизатора приводит
к чрезмерным углам наклона и значительному уходу от программ набора
с потерей скорости.
В заключение необходимо подчеркнуть, что в процессе реализации и от-
работки автоматизированного режима управления истребителями МиГ-31 и
359
Су-27 при дальнем наведении создана логика функционирования бортовой
системы автоматического управления перехватчиком в наземных АСУ. Она
является развитием общей идеологии управления самолетом во внешних сис-
темах (см. разд. 4). Эта логика включает условия выбора программ движения
и законов управления истребителем.
Разработано алгоритмическое обеспечение цифрового вычислителя тра-
екторного управления ЦВТУ, решающее в полном объеме круг задач по ав-
томатизации траекторных режимов программного управления. В основу алго-
ритмов и логики ЦВТУ легли оригинальные технические решения.
Результатом всего этого явилось успешное функционирование на борту
самолетов МиГ-31 и Су-27 цифроаналоговых систем автоматического управ-
ления (соответственно обозначаемых САУ-155МП и САУ-10) на различных
этапах боевого применения. Эти САУ представляют собой многорежимные
системы программного управления, состоящие из цифрового вычислителя
ЦВТУ и аналогового автопилота.
Дальнейшим развитием цифрового вычислителя траекторного управле-
ния явилось создание высокопроизводительного цифрового вычислителя
ВЦ-6 (разработка МНПК "Авионика"). В этом вычислителе, являющемся со-
ставной частью комплекта САУ-ЮМ-03, реализуется система траекторного
управления самолетом Су-30МКИ. В вычислителе ВЦ-6 размещаются алго-
ритмы и логика управления истребителем от внешних систем, рассмотренные
в подразд. 3.5, обеспечивающие автоматический и директорный режимы пи-
лотирования на этапах боевого применения.
Список литературы к разделу 3
3.1. Левин М. А., Ильин В. Е. Современные истребители. Энциклопедия техники. - М.: Изд-во
Хоббикнига. Техника - молодежи, 1994.
3.2. Авионика России. Энциклопедический справочник / Гл. ред. С. Д. Бодрунов. - СПб.: На-
циональная ассоциация авиаприборостроителей, 1999.
3.3. Горелик А. Л., Бутко Г. И., Белоусов Ю. А. Бортовые цифровые вычислительные машины.-
М.: Машиностроение, 1975.
3.4. Козлов В. И. Системы автоматического управления летательными аппаратами. - М.: Ма-
шиностроение, 1979.
3.5. КринецкийЕ. И. Системы самонаведения. - М.: Машиностроение, 1970.
3.6. Расчет и анализ движения летательных аппаратов: Инженерный справочник / С. А. Г'орба-
тенко, Э. М. Макашов, Ю Ф. Полушкин, Л. В. Шефтель. - М.: Машиностроение, 1971.
3.7. Колпаков К. М., Войлокова Т. Н. Оценка бортовых вычислительных машин при проектиро-
вании БЦВС. - Труды ГосНИИАС. Сер. Вопросы авионики, 1998, № 2.
3.8. Позняков П. В., Федунов Б. Е. Основы информационной интеграции бортовой аппаратуры
Учебн. пособие. - М.: МАИ, 1993.
3.9. Красовский А. А., Ермилов А. С. Боевое применение и эффективность пилотажно-
навигационных комплексов летательных аппаратов. - М.: ВВИА им. Н. Е. Жуковского, 1989.
3.10. Антенные системы и радары с электронным управлением лучем/ Белый Ю., Синани А.
Военный парад, 1998, №29.
3.11. Радары НИИПа в небе и на земле/ Белый Ю. - Авиасалоны мира. № 1.
3.12. Следом "Адъютанты"... блещут "Эполеты" / Белый Ю. И., Синани А. И., Федотчен-
ко А. И. Мир авионики, 1999, № 6.
3.13. Научно-исследовательский институт приборостроения имени В. В. Тихомирова. История созда-
ния и развития / Под ред. А. Г. Акопяна, В. К Гришина, В. В. Матяшева, А. А. Растова. - М.: НИИП, 1999.
3.14. Фомин А. Су-27. История истребителя. Изд. РА Интервестник, 1999.
АВТОМАТИЗИРОВАННЫЕ f
СИСТЕМЫ УПРАВЛЕНИЯ'
БОЕВЫМИ ДЕЙСТВИЯМИ’ /
АВИАЦИИ ПВО I •- 4 /
Изложены принципы автоматизации управления боевыми действиями
истребительной авиации, приводятся структура и основные характеристи-
ки подсистем наземных АСУ. Предлагаются и обосновываются методы оп-
ределения возможности и параметров перехвата воздушных целей, решения
задач целераспределения и перенацеливания, наведения истребителей на воз-
душные цели. При рассмотрении проблем обеспечения безопасности управ-
ляемых АСУ истребителей излагаются методы предотвращения столкнове-
ний и способы выявления самолетов противника, могущих атаковать истре-
битель. Освещены перспективы совершенствования автоматизированного
управления действиями истребительной авиации и описаны методы исполь-
зования авиационных комплексов перехвата для получения информации о воз-
душной обстановке, методы поиска истребителями целей, потерянных ра-
диолокационным полем, координированное наведение на групповую цель не-
скольких истребителей.
4.1. Основы проектирования, структура
и характеристики наземных АСУ
4.1.1. Основы проектирования больших систем управления
Краткая история разработки АСУ истребительной авиации ПВО
После окончания Великой Отечественной войны в условиях "холодной
войны" важнейшей задачей государства явилось обеспечение защиты терри-
тории страны от средств воздушного нападения (СВН) возможного противни-
ка. Зенитно-ракетных комплексов (ЗРК) еще не существовало, а возможности
зенитной артиллерии были ограничены. Поэтому основное внимание при ре-
шении этой задачи уделялось истребительной авиации (ИА).
В то время скорости и высоты полета самолетов благодаря их оснащению
реактивными двигателями значительно выросли, что при ограниченных воз-
можностях оружия истребителей тех лет весьма усложнило перехват таких
целей и потребовало в первую очередь автоматизации процесса наведения ис-
требителей-перехватчиков на воздушные цели. Однако испытания первых
электромеханических приборов наведения показали, что для успешного ре-
шения задачи перехвата необходимо автоматизировать не только процесс на-
ведения, но и процессы получения, сбора, обработки и передачи на управ-
ляющие КП радиолокационной информации о воздушной обстановке и ин-
формации о возможностях и действиях своих средств. Первая система
"Воздух" (главный конструктор Кравец В. Я.) с электромеханической аппара-
турой наведения "Каскад" (главный конструктор Лившиц А. Л.), в которой
эти задачи были частично решены, прошла испытания совместно с первым
советским комплексом перехвата Су-9-51 и принята в 1960 г.
Одновременно была начата разработка территориальной системы ПВО
"Луч" (главный конструктор Лившиц А. Л.), управляющей действиями частей
ИА, зенитно-ракетных (ЗРВ) и радиотехнических войск (РТВ). Решение весь-
ма сложных задач, стоящих перед этой большой системой, было невозможно
обеспечить без широкого использования цифровой вычислительной техники.
Поэтому впервые в СССР в основу разработки сложной системы были поло-
жены потенциальные возможности цифровых вычислительных машин
(ЦВМ), несмотря на то что в то время в разработке ЦВМ были сделаны лишь
первые шаги, а опыт в проектировании их программного обеспечения полно-
стью отсутствовал.
В итоге продолжительных испытаний несколько районов СССР были ос-
нащены системой "Луч", в которой наряду с электромеханической аппарату-
363
рой пункта наведения (ПН) "Каштан" (главный конструктор Тибилов В. П.)
впервые осуществлено "цифровое", т. е. реализованное на ЦВМ, наведение. В
конце 70-х годов на базе еще несовершенных тогда ЦВМ были разработаны,
испытаны и приняты АСУ боевыми действиями истребительного полка (иап)
"Рубеж" (главный конструктор Чудинов С.М.), пункт наведения ВВС "Сплав"
(главный конструктор Федюнин А.Н.) и ПН ВМФ "Газон" (главный конструк-
тор Алексеев Ю. Ф.). В 80-х годах под руководством Алейникова Н. К. на
авиационном комплексе радиолокационного дозора и наведения (АК РЛДН)
"Шмель" был реализован пункт наведения.
В результате уровень автоматизации в решении задач управления боевы-
ми действиями ИА, зенитно-ракетных и радиотехнических войск в ПВО ока-
зался существенно более высоким, чем при решении задач Военно-
Воздушных Сил и Сухопутных войск.
Опыт, приобретенный при проектировании, испытаниях и внедрении
сложных и больших автоматизированных систем управления, позволяет
сформулировать следующие основные принципы их разработки, которые мо-
гут быть использованы при создании не только военных, но и других систем.
Принципы разработки больших систем управления
Согласно основным закономерностям научно-технической революции XX
века в основу разработки АСУ целесообразно положить концепцию системно-
го подхода и целевого управления [4.1-4.3]. Использование этой концепции
требует четкого представления о предназначении (цели) и условиях разработки
и использования системы, а также формирования критерия, позволяющего
оценить степень достижения этой цели разрабатываемой АСУ. Этот критерий
должен учитывать как внешние условия, в которых будет функционировать
система, так и всякого рода ограничения, которые будут иметь место при раз-
работке, изготовлении и эксплуатации АСУ. Поскольку эти ограничения или,
по крайней мере, часть из них нежесткие и их в той или иной степени можно
преодолеть, вложив в АСУ большие средства, наиболее общим, глобальным
критерием (показателем) качества системы является выражение, оценивающее,
с одной стороны, ее эффективность, а с другой стороны, стоимость (рис. 4.1.1).
Одновременно максимизировать эффективность и минимизировать стои-
мость системы нельзя. Поэтому использование таких многокомпонентных
критериев, называемых векторными, в отличие от однокомпонентных, ска-
лярных критериев представляет дополнительные трудности. В большинстве
случаев их преодолевают, задавая либо значение одного из компонентов, на-
пример стоимости, в виде ограничения и оптимизируя величину другого ком-
понента, либо значения весовых коэффициентов при компонентах и оптими-
зируя их взвешенную сумму.
Использование концепции системного подхода и целевого управления
позволяет сформулировать ряд принципов проектирования АСУ. Для дости-
жения экстремума глобального критерия качества необходимо обеспечить:
• адаптивность системы к изменению условий функционирования;
• иерархичность системы, т. е. четкое ее разделение на подсистемы и со-
ставляющие их элементы с определением функций этих компонентов и
условий их взаимодействия;
364
• "равнопрочность" элементов системы;
• рациональный уровень унификации этих элементов.
Каждый из этих принципов определяет соответствующие методологиче-
ские направления работ (см. рис. 4.1.1).
Кон- цепция разра- ботки
Цель разработки Системный подход
Концепция целевого управления
Внешняя среда Ресурсные ограниче- ния
Глобальный критерий качества эффективность - стоимость
—
Прин- ципы
Адаптивность Иерархичность "Равнопроч- ность" Унификация
Ф Ф Ф Ф
Мето- дологи- ческие направ- ления работ 1. Обеспечение ре- конфигурации систем в целях сохранения надежности и живу- чести. 2. Адаптация про- граммного обеспече- ния к загрузке вычис- лительного комплек- са. 3. Разработка проце- дур настройки про- граммного обеспече- ния на условия функ- ционирования АСУ. 4. Разработка само- обучающихся систем 1. Структуриро- вание системы. 2. Структуриро- вание программ- ного обеспече- ния. 3. Распределение функций между элементами системы. 4. Формирование общего и част- ных критериев качества 1. Рациональное распределение ресурсов между элементами системы. 2. Соответствие между внутрен- ним и внешним правдоподоби- ем модели сис- темы управле- ния. 3. Эволюцион- ность развития АСУ 1. Определение рациональной степени унифика- ции. 2. Формирование базовых решений 3. Разработка ба- зовых элементов аппаратуры и программного обеспечения. 4. Формирование базовой техноло- гии разработки и отладки про- граммного обес- печения. 5. Реализация сборочного про- граммирования
Рис. 4.1.1. Методология проектирования сложных АСУ
Принцип адаптивности. Изменение условий функционирования АСУ
может произойти как из-за выхода из строя того или иного ее элемента вслед-
ствие отказа или воздействия противника, так и по причине изменения внеш-
них условий (соотношение сил, дислокация частей и т. д.).
В первом случае требуется выполнение такой реконфигурации системы,
т. е. изменения структуры функционирующих элементов АСУ и связей между
ними, которая обеспечила бы минимальное снижение эффективности системы.
При этом путь введения в систему резервных элементов, используемых при
выходе из строя элементов основных, следует использовать лишь для элемен-
тов с низкой надежностью функционирования (например, из-за низкой надеж-
365
ности ЦВМ устаревших типов в систему часто вводилась резервная ЦВМ), по-
скольку широкое резервирование элементов системы приводит к существен-
ному увеличению ее стоимости. Поэтому в случаях, когда на это приходится
все-таки идти, например при резервировании командных пунктов (КП) высоко-
го уровня, целесообразно уровень аппаратурного и программного обеспечения
запасного КП иметь существенно упрощенным по сравнению с основным КП,
что значительно понизит его стоимость, но обеспечит возможность функцио-
нирования системы, хотя и с несколько меньшей эффективностью, и в экстре-
мальных условиях, вероятность возникновения которых невелика.
В настоящее время все более широкое распространение получают методы
такой реконфигурации системы, при которой в случае выхода из строя части
элементов система продолжает функционировать (с меньшей эффективностью)
без использования дублирующих элементов. Это приводит к существенному
уменьшению стоимости системы и достигается путем некоторого (избыточного
для нормального режима) расширения возможностей элементов, достигаемого
в основном за счет расширения функций программного обеспечения ЦВМ этих
элементов. Например, на пункт наведения системы не только возлагается зада-
ча наведения, но и требуется при выходе из строя управляющего КП обеспе-
чить возможность назначения воздействий истребителей по целям хотя бы в
полуавтоматическом режиме; в вычислительных комплексах, состоящих из не-
скольких ЦВМ, от каждой (или части) из них требуется обеспечение возмож-
ности решения всех задач, возложенных на вышедшую из строя ЦВМ.
Естественно, что в последнем случае неизменный уровень эффективности
функционирования АСУ можно будет сохранить лишь при сниженном уровне
загрузки системы по сравнению с максимальной загрузкой, т. е. при меньшем
количестве целей. Однако и при полной загрузке и выходе из строя части
ЦВМ можно не допустить существенного снижения эффективности системы,
если обеспечить растяжку циклов решения периодических задач и переход к
их решению более грубыми и менее хроноемкими (т. е. требующими меньше-
го машинного времени) методами. Реализация этого метода потребует разра-
ботки алгоритмов и программ регулирования вычислительного процесса в за-
висимости от загрузки АСУ.
Следует подчеркнуть категорическое требование отсутствия таких элемен-
тов, выход из строя которых приводил бы к выходу из строя всей системы.
Принцип иерархичности, во-первых, требует разделения системы на об-
разующие ее функциональные подсистемы [4.4, 4.5], которыми в АСУ ПВО
являются подсистемы информационного обеспечения, связи и передачи дан-
ных, управления боевыми действиями, материального и прочего обеспечения
этих действий и функционирования войск в мирное время. Каждая из этих
подсистем включает в себя аппаратурные и программные средства, которые
также должны быть четко структурированы.
Во-вторых, необходимо определить функции каждого элемента структу-
ры, ввести в каждой подсистеме и в ее программном обеспечении уровни
управления и определить порядок взаимодействия структурных элементов,
входящих как в один, так и в разные уровни.
Сложившаяся в течение многих веков структура управления войсками
имеет ярко выраженный многоуровневый иерархический характер. Этот же
принцип должен быть положен и в основу проектирования АСУ, во-первых,
366
потому, что решения в автоматизированных системах принимают люди; во-
вторых, ввиду того, что по мере повышения уровня управления меняются ха-
рактер задач управления и формы представления информации, необходимой
для их решения; в-третьих, потому, что необходимость иерархии управления
является неизбежным следствием сложности решения рассматриваемых задач.
Однако отсюда не следует, что структура управления в АСУ должна строго со-
ответствовать сложившейся структуре управления в данном роде войск. В не-
которых случаях новые возможности, предоставляемые АСУ, могут привести к
целесообразности изменения существующей структуры управления.
Концепция целевого управления требует обеспечения максимально воз-
можного при данных условиях и ограничениях качества решения основной
задачи (цели) системы в целом. Поэтому ограничения и критерии качества
решения частных задач различных иерархических уровней и разных подсис-
тем, входящих в АСУ, должны быть заданы так, чтобы оптимизация этих ча-
стных критериев обеспечила максимизацию общего критерия качества работы
системы в целом.
Таким образом, критерии качества каждого уровня иерархии должны за-
даваться в соответствии с "потребностями" более высокого уровня управле-
ния, т. е. исходя из более общей постановки задачи. Проектирование системы
управления целесообразно производить "сверху вниз", т. е. от общего к част-
ному, что позволит оценить вклад элементов каждого уровня иерархии в об-
щую эффективность системы и на этой основе распределить имеющиеся ма-
териальные ресурсы между элементами системы.
Принцип "равнопрочности" элементов АСУ [4.6] требует такого рас-
пределения ресурсов, выделенных на проектирование, изготовление и экс-
плуатацию этих элементов, которое обеспечит максимум эффективности сис-
темы. Под "равнопрочностью" элементов АСУ следует понимать равенство
для этих элементов значений производных , где дЭ - приращение
эффективности АСУ в целом за счет введения в систему элемента z-ro уровня
(z-ro типа КП, аппаратуры или программы ЦВМ) вновь или взамен менее эф-
фективного, a - соответствующее приращение стоимости системы.
Следует также обеспечить соответствие внутреннего и внешнего правдо-
подобия [4.7], т. е. соответствие уровня точности решения задач, возложен-
ных на АСУ, уровню соответствия математической модели системы (и, в ча-
стности, точности исходных данных) самой системе.
Из принципа "равнопрочности" вытекает целесообразность эволюцион-
ного пути развития АСУ и ее элементов, поскольку эволюционный путь эко-
номически значительно более выгоден, чем путь полной замены одной систе-
мы другой. Однако эффективное эволюционное развитие системы или ее под-
системы возможно до тех пор, пока принципы построения, структура или
средства вычислений и связи системы (подсистемы) и т. п. не войдут в проти-
воречие с требованиями, предъявляемыми к АСУ новыми обстоятельствами,
например появлением нового вида оружия. При возникновении таких проти-
воречий целесообразна коренная перестройка системы (подсистемы) или раз-
работка новой АСУ, как это имело место после появления ЦВМ и ракетно-
ядерного оружия.
367
Применительно к математическому обеспечению системы также требуется
оперативная адаптация уже созданного программного обеспечения к измене-
нию стоящих перед ней задач и условий ее функционирования путем обеспе-
чения возможности постепенной замены морально устаревших программ но-
выми.
Принцип рациональной унификации элементов системы требует при
проектировании АСУ проведения исследований для определения рациональ-
ной степени унификации ее элементов.
На стоимость АСУ большое влияние оказывает степень унификации ее
элементов. На разных уровнях системы целесообразная степень унификации
элементов АСУ должна быть различной. На низших уровнях, например на
уровне микросхем вычислительной техники, целесообразна не только уни-
фикация, но и стандартизация соответствующих элементов, поскольку эти
элементы используются отнюдь не только в данной АСУ. Повышение степе-
ни унификации, с одной стороны, уменьшает стоимость унифицируемого
изделия за счет снижения количества типов производимых изделий при од-
новременном росте их тиражности, но, с другой стороны, при этом неизбеж-
но повышение степени аппаратурной или программной избыточности, что
ведет к некоторому удорожанию изделий. Поэтому каждым конкретным ус-
ловиям и каждому уровню унификации соответствует рациональная ее сте-
пень. Оценка этой степени для разных уровней унификации - важнейшая за-
дача проектирования АСУ.
Поскольку непосредственное управление многими видами современной
боевой техники и вооружения, т. е. управление в нижних звеньях АСУ, вооб-
ще невозможно без высокой степени автоматизации, реальное проектиро-
вание ряда АСУ велось по схеме "снизу вверх". При этом отсутствие систем-
ного подхода приводило к росту стоимости этих систем и снижению их эф-
фективности главным образом из-за трудностей сопряжения уже функциони-
рующих элементов АСУ с вновь разрабатываемыми элементами более высо-
кого уровня и обеспечения взаимодействия этих элементов. К особенно
неблагоприятным последствиям приводит отсутствие унификации аппарату-
ры и программного обеспечения в системе обмена информацией между эле-
ментами АСУ.
Поэтому важное значение имеет разработка базовых решений, опреде-
ляющих типовую структуру и типовые элементы систем управления войсками
и принципы взаимодействия как между элементами данной АСУ, так и между
разными системами. Формирование таких решений позволит разработать уни-
фицированные базовые конструкции, которые смогут эффективно применять-
ся в разных АСУ.
Общее программное обеспечение в значительной степени унифицировано
уже в настоящее время. В дальнейшем этот процесс продолжится. Специаль-
ное (функциональное) программное обеспечение унифицировать сложнее.
Однако проведенные исследования показали, что в ПВО могут быть унифи-
цированы алгоритмы и программы решения до 70% задач, естественно, с со-
ответствующей настройкой на требования данной АСУ или ее элемента. Раз-
работка унифицированных программных модулей решения различных задач и
формирование базовой технологии разработки и отладки программного обес-
368
печения позволят реализовать концепцию сборочного программирования,
обеспечивающего быстрое формирование матобеспечения данной АСУ в ос-
новном из базовых программных модулей, разработанных заранее и храня-
щихся в библиотеке.
Принципы проектирования алгоритмов
функционального программного обеспечения
В основе этого проектирования лежат методы прикладной математики
[4.7]. Решение прикладных задач и, в частности, проектирование алгоритмов
функционального программного обеспечения АСУ начинается с их постанов-
ки и разработки математической модели рассматриваемого объекта, например
системы ПВО. Этот этап весьма важен, поскольку от того, как будет постав-
лена задача и разработана модель, зависят как достоверность и точность ее
решения, так и трудоемкость, а в ряде случаев возможность практического
получения этого решения. Попытки учесть все факторы, в той или иной сте-
пени влияющие на результаты решения, часто приводят к тому, что его полу-
чение становится практически невозможным, поскольку во многих задачах
сложность решения в зависимости от числа переменных возрастает экспонен-
циально и даже гиперэкспоненциально [4.8]. Поэтому важнейшей задачей ис-
следователя и, в частности, разработчика алгоритмов функционального про-
граммного обеспечения АСУ является рациональное сокращение числа пере-
менных параметров в модели рассматриваемого объекта. Ее решение, как и
постановка задачи и формирование критериев качества, требует от исследова-
теля глубоких знаний, развитой интуиции и обширного опыта. Поэтому такая
работа должна быть поручена наиболее квалифицированным специалистам,
которым целесообразно руководствоваться следующими положениями [4.7].
Во-первых, надо оценить основные масштабы временной и пространст-
венной протяженности изучаемого явления. Если, например, рассматривается
процесс перехвата воздушной цели, то можно полагать, что время наведения
истребителя измеряется десятками минут, а время наведения ракеты, запу-
щенной с него, — десятками секунд.
Во-вторых, целесообразно выделить переменные с "нормальным" (близким
к характерному времени), "медленным" и "быстрым" темпами изменения. При
этом "медленные" переменные рационально заменить константами, величина
которых зависит от условий решения задачи, а "быстрые" переменные заме-
нить их осредненными значениями или вообще исключить, если они оказыва-
ют малое влияние на результат решения задачи. Так, например, время, потреб-
ное на создание крена, необходимого для ввода истребителя в разворот, изме-
ряется единицами секунд. Поэтому характер этого переходного процесса
практически не оказывает влияния на время наведения. Следовательно, при
решении задачи наведения можно не интересоваться положением органов
управления движением самолета и исключить из рассмотрения соответствую-
щие переменные вместе с целым рядом дифференциальных уравнений, опре-
деляющих вращение самолета вокруг центра масс, что кардинально упрощает
решение задачи.
Напротив, при создании устройств отработки команд наведения на борту
истребителя следует в той или иной мере учитывать эти уравнения, но это -
369
24 - 4094
задача бортовых систем управления, которая может решаться независимо
от формирования команд наведения.
В-третьих, целесообразно ввести иерархию переменных, представленную
на рис. 4.1.2, и при необходимости высокой точности решения перейти к ите-
рационному методу его получения: на первом этапе "медленные" переменные
заменяются константами, а "быстрые" переменные - их средними значениями
и задача решается для типовых условий функционирования рассматриваемой
системы. Во второй итерации в решение вводятся поправки, учитывающие из-
менения "медленных" переменных во времени и пространстве и отклонения
"быстрых" переменных от их средних значений. При необходимости решение
повторяется при других значениях дополнительных параметров, других усло-
виях функционирования системы.
Уточняющие переменные
Рис. 4.1.2. Иерархия переменных
В-четвертых, необходимо обеспечить соответствие точности применяе-
мых методов решения задач, возлагаемых на подсистемы АСУ, степени адек-
ватности математической модели самой системе и, следовательно, точности
исходных для разработки функционального программного обеспечения дан-
ных. Несоблюдение этого требования практически не приведет при использо-
вании сложных методов решения задач к повышению точности их решения,
но увеличит время, потребное на разработку и отладку соответствующих про-
грамм, а также машинное время, необходимое для их решения, что при огра-
ниченных вычислительных ресурсах АСУ и времени на разработку и отладку
программного обеспечения вызовет снижение точности решения других задач
и в итоге - снижение эффективности системы.
370
Несмотря на очевидность рассматриваемого требования, при разработке
сложных систем оно редко соблюдается, что объясняется как трудностью
оценки степени соответствия адекватности модели реальному объекту и точ-
ности методов решения отдельных задач, так и стремлением разработчиков
функционального программного обеспечения подсистем, входящих в общую
систему, решать свои частные задачи наиболее точно. Это стремление, одна-
ко, далеко не всегда приводит к положительным результатам, поскольку
уровни качества разработки отдельных блоков общей математической модели
объекта, а следовательно, и степени их адекватности ему, как и методов ре-
шения частных задач в этих блоках, могут весьма существенно различаться.
Это приводит к "неравнопрочности" блоков модели проектируемой системы
и, следовательно, к снижению эффективности ее функционирования. Поэтому
важной задачей руководителей разработчиков АСУ является выявление "сла-
бых мест" в системе и принятие мер к их устранению.
4.1.2. Особенности систем управления
боевыми действиями истребителей
Высокая экономичность турбореактивных двигателей по сравнению с ра-
кетными двигателями обеспечивает истребителям большие радиусы действия.
Однако ТРД с соответствующей системой забора воздуха — двигатели слож-
ные и дорогостоящие, рассчитанные на многоразовое применение. Столь же
сложны и дороги современные бортовые системы обнаружения целей и
управления ракетным оружием. Это требует обеспечения многоразовости
применения авиационных комплексов перехвата (АКП). Их многоразовость
может быть достигнута и без участия человека (летчика), но пока беспилот-
ные истребители-перехватчики практического применения не нашли.
Наличие человека на борту истребителя расширяет его возможности по
адаптации к изменению внешних условий (тактики ведения боя, условий по-
садки и т. п.) и повышает эффективность применения АКП, но вместе с тем и
возлагает на автоматизированную систему управления его боевыми дейст-
виями дополнительные задачи по обеспечению безопасности экипажей АКП.
Большие радиусы действия АКП ведут и к большим значениям полетного
времени истребителей до рубежей перехвата, особенно при использовании
крейсерских (дозвуковых) режимов полета. Поэтому для того, чтобы в полной
мере использовать возможности АКП по радиусам их действия, необходимо
существенно расширить поле получения радиолокационной информации по
сравнению с областью возможного перехвата, что далеко не всегда можно
обеспечить даже в глубинных районах страны. Учитывая, что в разных усло-
виях дальности обнаружения целей и скорости их полета могут изменяться,
для обеспечения минимума глубины проникновения средств воздушного на-
падения на обороняемую территорию АСУ должна при каждом назначении
воздействия АКП по цели определять такой режим его полета, который обес-
печивает максимум среднего значения скорости и является выполнимым по
запасу топлива. Это сильно усложняет решение задач назначения воздействий
и наведения АКП.
371
24*
Необходимость создания поля радиолокационной информации ставит пе-
ред АСУ не только задачи получения от радиолокационных станций данных о
воздушной обстановке, их первичной и вторичной обработки, но и задачи
отождествления и обобщения этой информации (третичная обработка) от не-
скольких РЛС и радиолокационных узлов. Решение этих задач возлагается на
информационную подсистему АСУ, эффективное функционирование которой
особенно важно для наведения АКП, поскольку оно продолжается десятки
минут; в течение этого времени трасса цели, по которой назначено наведение,
не должна быть потеряна.
В зоне возможных перехватов должно существовать не только радиоло-
кационное поле, но и поле команд, образуемое станциями передачи команд
наведения на борты АКП, а также поле приема информации от них.
Таким образом, большие радиусы действия АКП приводят к необходимо-
сти создания весьма сложных и больших АСУ боевыми действиями АКП.
Роль боевого расчета в управлении действиями истребителей
Интенсивное развитие вычислительной техники привело к весьма быстро-
му росту возможностей ЦВМ. Однако отсюда отнюдь не следует, что в скором
времени управление боевыми действиями ИА и, в частности АКП, будет пол-
ностью автоматизировано. Объясняется это тем, что управление боем является
сложной задачей, решаемой с помощью приемов не только военной науки, но и
военного искусства. В бою, управляемом людьми, очень большое значение
имеет фактор внезапности, который достигается применением способов веде-
ния боя и тактических приемов, хотя, быть может, и не наилучших с точки зре-
ния теории исследования операций [4.9], но неожиданных для противника.
Противоборствующие стороны часто идут на риск, поэтому разгадать замысел
противника может, и то отнюдь не всегда, лишь человек, основываясь не толь-
ко на данных разведки о возможностях и намерениях противника, но и на ин-
формации о чертах характера командиров противоборствующей стороны и т.п.
Следовательно, решение такого рода интеллектуальных задач независимо от
возможностей ЦВМ остается прерогативой боевых расчетов КП АСУ. Однако
и их решение может быть автоматизировано. При этом на боевой расчет возла-
гается основополагающая задача ввода в ЦВМ некоторых параметров, опреде-
ляющих ход автоматического решения задач в соответствии с замыслом ко-
мандира по отражению налета. Следует, правда, отметить, что интеллектуаль-
ные задачи являются наиболее сложными и для человека. Для успешного их
решения необходимы многочисленные тренировки боевого расчета, что в АСУ
технически возможно, но практически реализуется далеко не в полной мере.
Активное участие боевого расчета в управлении действиями АКП является
не только желательным, но и возможным, так как вследствие большого пассив-
ного (подготовительного) и полетного времени истребителя процесс управле-
ния действиями АКП на большинстве этапов боевых действий не является ско-
ротечным. Однако в основном на боевой расчет должно быть возложено реше-
ние лишь интеллектуальных задач, таких, например, как задание степени
воздействия, т. е. количества истребителей данного типа, которое следует на-
значить для перехвата одного самолета-цели на данном этапе отражения нале-
та, задание параметров, позволяющих автоматически оценить относительную
важность целей, параметров зоны ответственности полка АКП и т. п.
372
4.1.3. Структура и основные характеристики
функциональных подсистем АСУ
Структурная схема единой системы управления боевыми действиями
авиации приведена в подразд. 1.2. Далее будет кратко рассмотрена функцио-
нальная структура АСУ: подсистемы получения, сбора и обработки информа-
ции о воздушной обстановке (информационная подсистема), подсистема свя-
зи и передачи данных, подсистема управления боевыми действиями и подсис-
тема обеспечения действий войск.
Информационная подсистема
Основной задачей этой подсистемы являются получение и обработка ин-
формации о воздушных объектах. Информационная подсистема состоит из
радиолокационных станций различных типов и командных пунктов радио-
технических войск разного уровня: радиолокационных постов, узлов (баталь-
онов) и центров (полков), обрабатывающих радиолокационную информацию
и обменивающихся ею между собой и управляющими КП.
Радиолокационные станции бывают кругового или секторного обзора,
трех- или двухкоординатные (в последнем случае для измерения высоты по-
лета воздушных объектов используются специальные станции - радиовысо-
томеры), активные, т. е. излучающие сигнал и принимающие его отражение
от воздушных объектов, и пассивные - только принимающие сигналы от воз-
душных объектов. Принципы работы РЛС изложены в [4.10].
Как уже отмечалось, основной задачей информационной подсистемы яв-
ляется первичная, вторичная и третичная обработка радиолокационной ин-
формации.
Главной задачей первичной обработки, которая может производиться как
на низовых КП, так и на самих РЛС, является выделение полезного сигнала о
воздушных объектах и преобразование содержащейся в нем информации в
цифровой код.
В процессе вторичной обработки, выполняемой на КП рот и батальонов
РТВ по информации от замкнутых на них РЛС, производится взятие ("за-
хват") воздушного объекта на сопровождение, т. е. завязка трассы и оконча-
тельное определение его государственной принадлежности (этот процесс на-
чинается на этапе первичной обработки), а по своим самолетам некоторых
типов - и его индивидуального номера; определение курса и скорости воз-
душного объекта, выявление его маневров и обеспечение непрерывного со-
провождения воздушного объекта в зоне видимости РЛС.
Третичная обработка, выполняемая на КП батальонов и полков РТВ,
включает в себя решение следующих основных задач:
• отождествление трасс воздушных объектов, приходящих от разных ис-
точников (в том числе и от АК РЛДН), т. е. установление факта принад-
лежности этих трасс одному и тому же объекту;
П. 4.1.3 написан совместно с В. А. Максимовичем.
373
• обобщение информации по одним и тем же воздушным объектам, прихо-
дящей от разных источников, или выбор наилучшего источника для со-
провождения данного объекта;
• присвоение воздушным объектам единых общегосударственных номеров;
• присвоение признаков, определяющих тип объекта (если его удается ус-
тановить): ракета, стратегический или тактический самолет, свой заявоч-
ный самолет и т. п.;
• определение координат помехопостановщиков триангуляционным или
корреляционным [4.10] методом;
• отбор трасс воздушных объектов для выдачи на управляющие КП в усло-
виях, когда количество трасс на информационном КП больше, чем может
принять управляющий командный пункт;
• группирование воздушных объектов в целях уменьшения количества объ-
ектов, отображаемых на средствах индикации и выдаваемых на КП.
Группирование воздушных объектов может производиться либо с помо-
щью некоторых способов по плоскостным координатам, размеры которых за-
дает боевой расчет, либо, что несравненно сложнее, путем выявления дейст-
вительных групп целей, выполняющих единую задачу (тактическое группи-
рование). Реализация тактического группирования позволяет не только
уменьшить количество объектов, подлежащих отображению, но и обеспечит
устойчивое их сопровождение и возможность организации координирован-
ных действий АКП по этим группам (см. пп. 4.4.3 и 4.4.4). Оптимальной сле-
дует полагать такую процедуру тактического группирования, которая для
сформированных групп обеспечивает минимум выражения rcp = rCP / Rcp, где
гср и RCP - соответственно среднее расстояние между самолетами в сформи-
рованных группах и между этими группами.
Заметим, что под термином "расстояние" здесь следует понимать рас-
стояние между самолетами не в обычном пространстве, а в пространстве ин-
формационных параметров, к которым относятся не только координаты воз-
душных объектов, но и параметры (курс, скорость) их движения, а также не-
которые признаки ("свой", "чужой" и др.). Действительно, если в данный
момент два самолета находятся рядом, но летят в разные стороны, то тактиче-
скую группу они не образуют.
Принцип решения задачи тактического группирования основан на упоря-
доченном переборе различных вариантов разбиения для отыскания варианта,
обеспечивающего минимум значения гср. Для сокращения переборов целесо-
образно задание (с возможностью введения корректив боевым расчетом) ми-
нимального расстояния между группами /?mjn и максимального расстояния
между самолетами в группах (при г > гтт самолеты считаются заведомо
не принадлежащими, а при г < Rmin принадлежащими к одной группе, кото-
рая может состоять и из одного воздушного объекта).
Наиболее просто задача решается, если положить
in = rmax =/'(,= const, так как это позволяет осуществлять тактическое
374
группирование методом стробирования, при котором к одной группе относят-
ся объекты, расстояние между которыми меньше г0 . Однако при этом ошибки
радиолокационных измерений, а также применение противником тактических
групп разного размера и конфигурации приведут к значительному увеличе-
нию ошибок группирования, что будет выражаться в нестабильности сформи-
рованных групп, а это усложнит слежение за уже сформированными группа-
ми и может привести к необходимости выполнения повторного группирова-
ния по "старым" объектам.
Изменением значений R- и г „ можно обеспечить достижение различ-
111111 IliclX 1
ных степеней укрупнения воздушной обстановки (рис. 4.1.3). Необходимо
также предусмотреть возможность разгруппирования указанной боевым рас-
четом группы до трасс отдельных самолетов или неразрешимых РЛС групп.
Рис.4.1.3. Представление воздушной обстановки:
а - детальное; б — малая степень укрупнения; в - большая степень укрупнения
Информацию о группах своих АКП также следует группировать, но это
задача более простая, так как известен и численный состав группы АКП, и
целесообразный размер строба группирования.
Информационная подсистема в АСУ может быть либо отделена от подсис-
темы управления, либо в той или иной степени совмещена с ней. В первом слу-
чае радиолокационная информация собирается и отрабатывается автономной
информационной подсистемой, построенной по иерархическому принципу: ро-
та, батальон, полк РТВ. При этом информация в подсистему управления посту-
пает "сверху вниз", т. е. от старших командных пунктов к младшим. Основным
достоинством такой структуры является простота использования в АСУ единой
нумерации воздушных объектов и наиболее полная на этой основе реализация
принципа целевого управления, при котором старший КП ставит задачи под-
чиненным частям, координирует их действия и не допускает дублирующих
воздействий по одной и той же цели АКП разных иап. Основной ее
недостаток - наличие длинных связей (как в прямом смысле, так и в смысле
количества ступеней обработки и ретрансляции информации) между ее источ-
никами и потребителями.
Реализация такой структуры тем более рациональна, чем большими воз-
можностями обладает государство при ее оснащении современными высоко-
производительными ЦВМ и средствами передачи телекодовой информации.
Естественно при этом, что весь процесс прохождения информации от РЛС до
375
потребителя должен быть полностью автоматизирован. Если соответствую-
щими возможностями государство в данном районе страны не обладает, то
целесообразно использовать совмещенную структуру, при которой КП иап
объединены с КП батальона РТВ (т. е. с радиолокационным узлом), а пункт
наведения - с командным пунктом роты РТВ. Правда, количество пунктов
обработки информации будет заведомо больше числа пунктов наведения вви-
ду необходимости создания радиолокационных постов на малых высотах.
При этом трассы воздушных объектов на старший КП поступают от подчи-
ненных ему командных пунктов без единых номеров, а эти номера выдаются
на КП с некоторым запаздыванием. Такая структура позволяет уменьшить за-
паздывание в назначении воздействий перехватчиков по целям, находящимся
в зоне радиолокационного узла данного направления, которое может быть
существенным при низкой степени автоматизации в обработке и передаче
информации, но может привести к дублированию при назначении воздейст-
вий и, соответственно, к необходимости перенацеливания истребителей.
Совмещенная структура выгодна экономически, поскольку она позволяет
сократить протяженность и повысить эффективность использования линий
связи. При высокой степени автоматизации можно свести к минимуму и за-
паздывание в получении полками АКП единых номеров трасс воздушных
объектов.
В любом случае на управляющие командные пункты из информационной
подсистемы должен поступать по каждой трассе воздушного объекта сле-
дующий минимум информации:
• координаты объекта в принятой системе координат;
• параметры его движения (курс, скорость или составляющие вектора ско-
рости Vx, VY );
• признаки, определяющие особенности воздушного объекта и его сопро-
вождения (признак маневра объекта, признак необновления информации
по нему, признак снятия трассы объекта с сопровождения и т. п.).
После того как объекту присвоен общий номер, со старшего командного
пункта выдаются также данные о численном составе сгруппированной цели
(или признак того, что она является неразрешимой на отдельные самолеты),
признаки уже назначенных до данной цели воздействий средствами других
частей с указанием их типа (ИА, ЗРВ) и, желательно, количественного состава
этих воздействий, признаки необходимости первоочередного назначения воз-
действия по данной цели и др.
Если на бортах своих самолетов имеется аппаратура, выдающая индивиду-
альный номер, то и он должен поступать в систему, что позволяет весьма значи-
тельно повысить качество "захвата" и сопровождения таких объектов.
Рассмотрим теперь основные характеристики информационной подсис-
темы. Необходимость построения для обеспечения действий ИА обширно-
го РЛ-поля и большая длительность процессов перехвата целей истребите-
лями приводит к тому, что на качество этих процессов будут оказывать влия-
ние не только, а точнее, не столько случайные ошибки радиолокационной
информации, характеризуемые средними квадратичными величинами
376
сгАУ, <JH, сг^, Су, сколько потери, разрывы, ложные трассы и перепутывания
при проводке трасс объектов. Именно эти обстоятельства являются основны-
ми причинами срывов наведения истребителей по назначенным целям и не-
обходимости их перенацеливания, что не всегда оказывается возможным.
Эти факторы учитываются обобщенно с помощью коэффициента проводки
воздушного объекта
[t } tTP
г- _ 1тр _ Aj тр
ПР t У г ’
X.1 ВО Jcp Z^ilBO
где tTP - время, в течение которого выдавалась трасса; tBO - время, в течение
которого данный объект находился в поле информационной подсистемы, и
коэффициента ложных трасс
К (плт _ ^}лт
^лт ~ — 57/ ’
\ птр Jcp Z^J-tp
где плт - число ложных, т. е. несоответствующих реальным целям, трасс,
выдаваемых на некотором интервале времени tJ1T', птр - общее число выда-
ваемых трасс.
Таким образом, наряду с производительностью данного элемента информа-
ционной подсистемы, характеризуемой числом трасс N ТР воздушных объектов,
которые он может сопровождать при отсутствии активных помех, и числом трасс
лап сопровождаемых постановщиков активных помех (ПАП), в требованиях к
этому элементу для случаев отсутствия и наличия активных помех определенно-
го уровня следует задавать значения коэффициентов Кпр и Клт. Кроме того,
целесообразно задавать и значения сг^,, <ун , поскольку они влияют на точность
целеуказания бортовым РЛС перехватчиков, а также на величину сг^ и сг(. , ко-
торые оказывают влияние на эффективность планирования воздействий.
Подсистема связи и передачи данных
Эта подсистема является вторым важнейшим компонентом современных
АСУ (первый компонент - вычислительная техника). Она представляет собой
совокупность оконечных устройств и линий всех видов связи и передачи дан-
ных. Функциональное назначение подсистемы - обеспечение обмена инфор-
мацией как между элементами АСУ, так и в пределах каждого элемента.
Подсистема включает в себя следующие средства связи:
• телекодовую связь, обеспечивающую обмен цифровой информацией ме-
жду элементами АСУ;
• оперативно-командную (речевую) связь между элементами АСУ;
• внутреннюю связь каждого элемента АСУ;
• телекодовую связь, обеспечивающую обмен цифровой информацией ме-
жду пунктами управления и самолетами;
• речевую связь лиц боевого расчета КП и ПН системы с экипажами АКП.
377
Телекодовая связь между элементами АСУ образуется трактами передачи
данных. Каждый тракт - это линия связи и пара оконечных устройств, входя-
щих, как правило, в состав соответствующих элементов АСУ. Тракты передачи
данных должны удовлетворять определенным требованиям по пропускной
способности, достоверности передачи информации и др. Они могут быть орга-
низованы на каналах радио или проводной связи. Тракты передачи принято де-
лить на телеграфные и телефонные. Первые обеспечивают относительно низ-
кую скорость передачи - до 200 бит/с, вторые на стандартном телефонном ка-
нале - до 9600, а на широкополосном канале - до 48 000 бит/с. Большинство
современных трактов передачи данных оснащено аппаратурными и программ-
ными средствами повышения достоверности передачи информации.
Подсистема наземной связи может быть построена по радиальному
(рис. 4.1.4, а), коммутационному (рис. 4.1.4, б) или смешанному принципам.
В первом случае между парой абонентов образуются обычно два отдельных
разнесенных канала - основной и резервный. Во втором случае сеть связи ис-
пользуется коллективно всеми абонентами с помощью специальных узлов
коммуникации сообщений (УКС), определяющих в зависимости от адреса по-
лучателя информации и текущей занятости каналов связи рациональный путь
передачи сообщения. Второй принцип, несомненно, более выгоден экономи-
чески, так как позволяет резко уменьшить количество каналов связи (заметим,
что стоимость прокладки новых каналов связи или аренды уже существую-
щих - один из основных компонентов стоимости АСУ), но его реализация
требует введения в систему сложных коммутационных узлов и преодоления
ряда других трудностей.
Q - КП; • - УКС; (•) - КП, совмещенный с УКС;
------ - основные; ---------- резервные
а
б
Рис. 4.1.4. Принципиальные схемы фрагментов цепей связи;
а - радиальная; б - коммутируемая
378
Оперативно-командная связь между элементами АСУ организуется по из-
вестным схемам двухсторонней телефонной или громкоговорящей связи.
Внутренняя оперативно-командная связь отдельного элемента АСУ обес-
печивает переговоры лиц боевого расчета между собой; она может быть как
двухсторонней телефонной, так и громкоговорящей.
Для передачи команд и другой информации истребителям необходима
организация поля команд, состоящего из станций передачи команд (СПК), со-
вмещенных с пунктами наведения или вынесенных. В качестве ПН с СПК
может быть использован АК РЛДН, который выдает команды и истребителям
устаревших типов, не способным обнаруживать и атаковать цели на фоне
земной поверхности и вынужденным при перехвате маловысотных целей
опускаться на высоты, не обеспеченные полем команд наземных СПК.
Помимо станций передачи команд на ПН и КП необходимо иметь радио-
станции УКВ и ДЦВ диапазонов для обеспечения голосовой связи с летчиками.
Тракты обмена телекодовой информацией с бортами истребителей обес-
печивают не только связь "земля-борт", но и передачу информации в обрат-
ном направлении. На управляющий КП может быть передана информация о
барометрической (т. е. определенной по давлению воздуха) высоте полета ис-
требителя, об остатке топлива и боекомплекта, о координатах и параметрах
движения целей, сопровождаемых БРЛС.
Для повышения достоверности передачи телекодовой командной инфор-
мации на борт АКП в условиях специально организованного противником ра-
диопротиводействия можно применять различные методы, в том числе ис-
пользовать сложные широкополосные сигналы, позволяющие работать "под
шумами" (т. е. при уровне полезных сигналов, меньшем уровня шума), или
осуществлять подавление помех силовым методом путем передачи информа-
ции мощным передатчиком в узком луче и узкой полосе частот. В последнем
случае СПК способна определять и координаты истребителей, которым вы-
даются команды.
Подсистема управления боевыми действиями
Применительно к АКП основной задачей этой подсистемы являются пла-
нирование боевых действий и реализация этих планов, т. е. осуществление
наведения истребителей на воздушные цели и их атака. Процесс управления
распределен не только по элементам подсистемы, но и по этапам организации
боевых действий АКП. Основными из этих этапов являются:
• предварительное планирование воздушных операций, вскрытие замысла
налета противника (с его уточнением в процессе боя) и формирование
общей тактики отражения налета;
• планирование боевых действий нарядов перехватчиков по одиночным и
групповым воздушным целям (целераспределение и перенацеливание
АКП);
• реализация спланированных действий истребителей, т. е. их наведение на
воздушные цели, и решение других задач.
При реализации этих этапов возникает ряд дополнительных задач, таких,
как приведение частей в заданные степени боевой готовности, организация
взаимодействия частей ИА и ЗРВ и обеспечения безопасности управляемых
379
истребителей, управление службами аэродромов иап, управление действиями
средств РТВ и радиопротиводействия, формирование разнообразных распо-
ряжений, докладов, донесений и т. п.
Структурная схема АСУ и ее подсистемы управления приведена в под-
разд. 1.2. Каждый элемент подсистемы должен решать соответствующие его
рангу задачи. Распределение задач между КП разных уровней подсистемы це-
лесообразно проводить в соответствии со следующими основными требова-
ниями, вытекающими из принципов, изложенных ранее:
• в нормальном режиме функционирования АСУ на каждом уровне управ-
ления целесообразно решать те задачи, которые не могут быть решены с
требуемым качеством на нижестоящем уровне;
• передача части функций управления на нижестоящие уровни не должна
снимать с вышестоящих КП ответственности за выполнение задачи в целом;
• в случаях, когда нижестоящий КП теряет связь с вышестоящим, а также в
процессе развертывания системы должна быть обеспечена возможность
работы этого КП в автономном режиме, при котором на него возлагается
реализация в упрошенном режиме и части функций вышестоящего КП.
В соответствии с этими требованиями на КП высшего уровня данного ре-
гиона должны в основном решаться задачи предварительного планирования и
материально-технического обеспечения действий войск. Их решение возлага-
ется на боевой расчет командного пункта. При этом целесообразно широкое
использование ЦВМ, работающих не в реальном масштабе времени. Кроме
того, на этот КП должна оперативно поступать и обрабатываться боевым рас-
четом обширная укрупненная информация о воздушной обстановке, о состоя-
нии и действиях подчиненных частей и соединений.
Основная задача КП тактических соединений региона (см. и. 1.2.1) -
предварительное и оперативное управление действиями подчиненных частей.
Применительно к управлению действиями истребительной авиации это тре-
бует решения следующих основных задач управления частями [4.11]:
• выдача распоряжений и прием донесений о боевой готовности подчинен-
ных частей;
• предварительное планирование отражения налета и выдача соответст-
вующих распоряжений на КП иап;
• отбор для КП иап трасс его истребителей и трасс целей (с выдачей при-
знаков действия по ним других частей и указания приоритетных для
уничтожения целей) для назначения воздействий по ним с КП иап с пра-
вом КП тактического соединения на запрет реализации части воздействий
в случаях дублирования;
• предварительное выявление (см. п. 4.3.2) воздушных объектов, могущих
столкнуться с наводимыми данным иап истребителями или обстрелять
их, и выдача трасс этих объектов на КП иап;
• управление передачей наведения от одного КП иап другому;
• прием от частей донесений об их состоянии и ходе боевых действий.
Кроме того, для обеспечения режима живучести АСУ при выходе из
строя части КП иап на КП тактических соединений целесообразно преду-
смотреть возможность решения задач целераспределения (ЦР) и наведения
для ограниченного количества АКП, поднятых в зоны барражирования.
380
На КП иап возлагается решение следующих основных задач:
• выдача на стартовые КП аэродромов иап распоряжений на приведение
истребителей в заданные степени боевой готовности и на взлеты по го-
товности;
• назначение воздействий АКП (групп АКП) по выданным КП тактическо-
го соединения одиночным и групповым целям, т. е. решение задач ЦР;
• перенацелевание истребителей на другие цели в случае невозможности
или нецелесообразности перехвата назначенной цели;
• постановка задач ПН на наведение АКП по назначенным целям, контроль
за его ходом и принятие решений о переводе истребителей на привод на
заданный аэродром посадки;
• выявление объектов, способных столкнуться с управляемыми АКП;
• управление передачей наведения от одного ПН другому;
• управление действиями стартовых командных пунктов аэродромов иап.
На КП иап целесообразно возложить и функции наведения АКП.
Основные задачи ПН - наведение самолетов на заданные цели, их привод
на аэродром посадки, обеспечение безопасности наводимых самолетов и др.
Кроме того, для обеспечения живучести АСУ при выходе из строя КП
иап на ПН целесообразно обеспечить возможность полуавтоматического ре-
шения задач целераспределения и перенацеливания АКП.
Структура АСУ иап. В принципе КП иап способен обеспечить не только
назначения воздействий истребителей, но и наведение всех АКП иап. Однако
это не рационально с точки зрения обеспечения живучести АСУ иап. Поэтому
в состав АСУ иап целесообразно включать КП, обеспечивающий возмож-
ность наведения части истребителей иап (возможно включение в состав КП
пункта управления и пункта наведения, как это показано на рис. 4.1.5), и
один-два пункта наведения. На каждый из ПН замыкаются до трех станций
передачи команд и воздушной радиосвязи - одной при ПН и двух вынесен-
Рис. 4.1.5. Структурная схема обмена информацией с АСУ иап (вариант):
КП - командный пункт; ПУ - пункт управления; ПН - пункт наведения;
РВ - радиовысотомерная станция; СПК - станция передачи команд
381
ных, образующих поле команд пункта. Поскольку переход с одной станции
передачи команд на другую может быть автоматизирован и не требует пере-
дачи наведения, что необходимо при смене ПН, в перспективе целесообразно
обеспечить возможность выхода как с КП, так и с любого ПН на любую стан-
цию; это позволит создать единое коммутируемое поле команд иап.
Командный пункт иап целесообразно объединить с РЛ-узлом (возможно
размещение КП иап и КП батальона РТВ на одной позиции), что обеспечит
его РЛ-информацией в зоне ответственности иап при выходе из строя КП
полка РТВ. Для обеспечения пункта наведения первичной радиолокационной
информацией о воздушной обстановке его следует скомплексировать с РЛС и
радиовысотомером (РВ). Это желательно сделать для предотвращения столк-
новений наводимых АКП с другими воздушными объектами, если должный
уровень достоверности вторичной, т. е. прошедшей цифровую обработку, ин-
формации в данной АСУ не достигнут.
Кроме того, командный пункт иап должен быть сопряжен дуплексными
трактами со стартовыми командными пунктами аэродромов иап, обеспечи-
вающими боевой расчет КП информацией о выполнении распоряжений на
перевод истребителей в заданные степени боевой готовности, о состоянии са-
молетов и летчиков иап и о необходимых для последующего автоматизиро-
ванного управления данных (индекс - позывной летчика, радиоданные борто-
вых средств, курс отхода от аэродрома, состав группы и др.). По тому же
тракту выдаются на аэродром команды на запуск двигателей самолета и его
взлет по готовности и принимаются донесения о фактическом взлете.
Подсистема обеспечения действий войск
Большинство задач этой подсистемы, особенно в верхних звеньях (за ис-
ключением оперативного сбора и отображения данных о состоянии войск и
ходе боевых действий и выдачи распоряжений), не требуют решения в мас-
штабе реального времени. К этой подсистеме относится топогеодезическое
обеспечение, без которого невозможны точное определение местоположения
каждого элемента АСУ и юстировка РЛС, а следовательно, и эффективное
функционирование АСУ; радиационная и химическая разведка; метеорологи-
ческое обеспечение; техническое и тыловое обеспечение войск и др.
Основными задачами технического и тылового обеспечения являются:
• обеспечение соединений и частей материальными средствами;
• строительство, содержание и восстановление командных пунктов, РЛС,
каналов связи, аэродромов и т.п.;
• обеспечение перебазирования частей;
• оказание медицинской помощи больным и раненым;
• торгово-бытовое и финансовое обеспечение.
Важная задача этой подсистемы - обеспечение повседневной деятельно-
сти частей и соединений. Для этого могут быть в той или иной степени авто-
матизированы решения задач учебно-боевой подготовки войск, таких, напри-
мер, как составление планов полетов, контроль за уровнем подготовленности
летчиков, т. е. слежение за их "рейтингом", и т. п.
382
4.2. Методы автоматизированного управления
боевыми действиями истребительной авиации
4.2.1 Вклад этапов управления в эффективность перехвата
Основные задачи и этапы управления были рассмотрены в п. 4.1.3. Оце-
ним целесообразную степень автоматизации и вклад каждого этапа в эффек-
тивность перехвата.
На этапе целераспределения, осуществляемом в ходе боя, по каждому ис-
требителю (наряду) или цели (группе целей) решения принимаются редко
(несколько раз за вылет), но количество истребителей, находящихся на управ-
лении КП, осуществляющих непосредственное планирование, велико, так как
этими КП должны быть пункты не ниже, чем КП иап или воздушный КП
(иначе слишком сложным станет обеспечение взаимодействия между этими
КП). Поэтому степень автоматизации решения задач целераспределения, т. е.
непосредственного планирования, должна быть выше, чем при планировании
предварительном.
Реализация плана при решении задачи перехвата включает этап наведе-
ния АКП, т. е. его выведения в зону возможных атак (ЗВА) цели, и саму ата-
ку, эффективность которой играет определяющую роль в решении рассматри-
ваемой задачи. При атаке истребителем одиночной цели эта эффективность в
значительной степени определяется возможностями системы его вооружения.
Однако при атаке групповой цели группой АКП весьма большое значение
приобретает степень автоматизации решения задачи целераспределения, т. е.
процесса распределения истребителей и их ракет по целям, которая должна
быть весьма высокой.
При отражении массированных налетов современными перехватчиками,
имеющими почти круговые зоны возможных атак и способными атаковать
цели на фоне земной поверхности, эффективность собственно наведения име-
ет второстепенное значение, поскольку она близка к единице и определяется в
основном характеристиками радиолокационного поля и топливным резервом,
выделенным на парирование маневров цели. В этих условиях весьма возрас-
тает вклад в эффективность АСУ непосредственного планирования отраже-
ния налета. Как правило, оно может быть реализовано лишь на наземных КП
или АК РЛДН, т. е. на тех командных пунктах, которые располагают инфор-
мацией о воздушной обстановке. Однако в тех случаях, когда обороняющаяся
сторона располагает лишь весьма редкой и неточной информацией о налете
(например, от космических средств), а потребный рубеж перехвата целей ле-
383
жит вне наземного радиолокационного поля, целесообразно по этой инфор-
мации оповещения поднять поисково-ударные группы истребителей (см.
п. 4.1.1, 4.1.3), управление действиями которых возложить на командира этих
групп (при условии наличия в его распоряжении информации о воздушной
обстановке от истребителей этих групп).
4.2.2. Методы определения возможности
и параметров перехвата воздушных целей
В основе управления боевыми действиями истребителей-перехватчиков
лежит так называемая штурманская задача, а именно задача определения воз-
можности и параметров перехвата. При этом весьма желательно, чтобы эти
параметры были близки к оптимальным значениям, обеспечивающим мини-
мально возможное в данных условиях время перехвата, т. е. минимальную
глубину проникновения цели на обороняемую территорию. Это позволит
наиболее полно реализовать потенциальные возможности истребителя как ле-
тательного аппарата.
Решение штурманской задачи лежит в основе как процесса наведения, по
существу реализуемого решением таких задач, так и целераспределения, по-
скольку при выборе лучшего истребителя для назначения на данную цель не-
обходимо знать значения времени и вероятности перехвата, обеспечиваемые
разными воздействиями.
В результате решения штурманской задачи должны быть определены
возможность перехвата данным истребителем данной цели, рекомендованные
полусфера атаки, метод и параметры наведения, а также рассчитаны значения
времени наведения и координаты рубежа перехвата.
Типовые режимы полета истребителей на перехват
При заданных методе наведения и полусфере атаки положение рубежа пе-
рехвата цели определяется режимом полета истребителя в вертикальной плос-
кости (точнее, в вертикальной поверхности, проходящей через проекцию тра-
ектории перехвата на горизонтальную плоскость, - "плоскости развертки").
Режим полета истребителя зависит от программы его полета (в функции
скорости и высоты) и режима работы двигателей. Режим полета определяет, с
одной стороны, значение радиуса действия истребителя по запасу топлива, а с
другой стороны, величину его средней скорости VCP. Чем больше VCP, тем
при прочих равных условиях меньше время перехвата и глубина проникнове-
ния цели, но тем меньше и радиус действия истребителя. Следовательно, ре-
жим полета истребителя надо задавать таким, чтобы обеспечить максимум
VCP при условии нахождения рубежа перехвата в области, достижимой по за-
пасу топлива, т. е. в зоне возможного перехвата (ЗВП).
Поскольку радиус действия истребителя с увеличением Vcp уменьшается,
каждым условиям перехвата должен соответствовать свой оптимальный ре-
жим полета истребителя, строгое определение которого является сложной за-
дачей теории оптимального управления [4.12]. Далее будет рассмотрено суб-
384
оптимальное, т. е. близкое к оптимальному, решение, доступное для реализа-
ции в современных АСУ.
Типовые программы набора высоты и скорости. В их основе лежит ба-
зовая программа набора высоты и скорости полета. Она осредняет энергетиче-
ски оптимальные программы [4.13], обеспечивающие минимум времени, пути
или расхода топлива, потребных для набора заданного уровня энергетической
высоты Н э —Н +(С2 2 g), соответствующего сумме потенциальной и кине-
тической энергии одного килограмма массы самолета. Базовая программа со-
стоит из участков, на которых выдерживается постоянное значение скорости
полета, приборной скорости Vnp, высоты или числа М (см. рис. 4.2.1).
Рис. 4.2.1. Энергетически оптимальные (-) и базовая (-) программы набора высоты и
скорости и программные скорости VN
Однако базовая программа в большинстве случаев не обеспечивает выве-
дение истребителя на заданные для выполнения атаки значения высоты и ско-
рости (На, Va), что при Va <l/max требует выполнения "сходов" с програм-
мы. В принципе эти "сходы" следовало бы выполнять маневром "горка", т. е.
с потерей скорости, что весьма осложняет как расчет параметров таких ма-
невров, так и их выполнение. Но при На, на несколько километров меньших
высоты потолка самолета НП при данной скорости, выполнение "схода" при
постоянной скорости, называемой программной скоростью VN, не приводит
к сколько-нибудь существенным потерям. Практически можно ограничиться
максимум четырьмя разными значениями VN, наибольшее из которых близко
385
25 - 4094
к Утах (эта скорость обычно ограничена по числу М), а наименьшее - к крей-
серской скорости Идр (см. рис. 4.2.1).
Типовые виды программ полета. На рис 4.2.2 качественно показаны зави-
симости от На радиуса действия истребителя, т. е. расстояние от аэродрома
взлета до рубежа, предельного по запасу топлива, при некотором значении V;<
и различных моментах включения форсажа. Кривая S3(Ha) соответствует
наиболее позднему включению форсажа, а именно в момент, когда время, ос-
тавшееся до конца наведения, равно времени, потребному на набор высоты
Н = На и скорости V = VN> VKP. Кривая S7(Ha) соответствует случаю
включения форсажа в момент достижения самолетом крейсерской высоты
НКР. Поскольку при этом полет на форсаже будет более продолжительным,
S2 < S3. При включении форсажа с момента взлета, чему соответствует кривая
S, (//„), радиус действия истребителя дополнительно уменьшится. Наконец,
кривой Sv(Ha ) соответствует случай, когда весь полет на перехват происходит
на форсаже в процессе набора высоты и скорости атаки. При этом отсутствует
балансный участок полета, выполняемый при Н = const и V = const в тече-
ние времени, равного разности между временем перехвата и временем набора
Рис. 4.2.2. Области (п) применения различных
видов программы полета для = const
Применению данного типового вида программы, т. е. логики включения
форсажа, и наличию или отсутствию балансного участка полета соответствует
некоторая область на рис. 4.2.2, граница которой обозначена номером п.
При S < So. V = VN м балансный участок отсутствует; а при Sn< S <Si
единственный балансный участок выполняется при V = VN. Если Si< S < S},
то таких участков может быть два: один при V = Укр и второй при У = .
Наконец, при X = S3 единственный
балансный участок выполняется
при V — Укр. Программы с одним
балансным участком называются
типовыми: крейсерскими или
дальними при /7 = 3 и форсаж-
ными или ближними при п = 1.
В случае S S2 и S S3 они не
обеспечивают максимально воз-
можного в данных условиях зна-
чения УСр из-за неполного исполь-
зования располагаемого топлива,
которое требует введения второго
балансного участка. При его наличии для X > X/ соотношение продолжитель-
ностей полета на первом (при V = Укр) и втором (при V = yN) участках мо-
жет быть найдено из условия расхода всего топлива, выделенного на выпол-
нение перехвата и привода на аэродром посадки, что обеспечит минимум глу-
бины проникновения цели.
386
Типовые профили полета на перехват. При постоянной скорости полета
и оборотах турбины на высотах Н > 11 км расход топлива реактивными двига-
телями пропорционален давлению воздуха. Поэтому он достигает минимума на
высотах, близких к НП. Следовательно, по достижении заданного значения
целесообразно, не дросселируя двигатель, выполнять набор высоты при
V = Ид, и лишь на заключительном этапе наведения осуществлять маневр вы-
хода на высоту атаки цели, если она будет отличаться от достигнутой истреби-
телем программной высоты НN , близкой к высоте потолка. Такие профили
полета, т. е. зависимости высоты от времени или пути, называются профилями
полета по потолкам (рис. 4.2.3). Их применение обеспечивает превосходство
истребителя над целью по запасу полной энергии и позволяет весьма сущест-
венно увеличить радиусы действия истребителя, особенно на сверхзвуковых
скоростях и при малых высотах атаки. Кроме того, эти профили вплоть до мо-
мента выдачи на борт истребителя команды "Вертикаль" на выполнение ма-
невра выхода на II позволяют истребителю осуществлять наивыгоднейший
по расходу топлива полет независимо от фактической высоты цели, которая
измеряется неточно и может меняться из-за ее маневров.
--------- - набор на форсаже; • - V = VN ;
------------- набор без форсажа; ° точка перехвата;
--------- - полет на Нкр, VKP; 1, 2, 3 - полет по потолкам;
--------- - снижение до На; I, II, III - полет на На.
Рис. 4.2.3. Профили полета на перехват
Однако для истребителей устаревших типов, не способных атаковать це-
ли на фоне земной поверхности, использование рассматриваемых профилей
может потребовать выполнения глубоких снижений, что несколько затрудня-
ет пилотирование. В этих случаях, а также вблизи от линии фронта при доз-
вуковых скоростях атаки может оказаться рациональным применение профи-
лей полета на высоте атаки цели, что затрудняет обнаружение истребителей
387
25’
наземными РЛС противника. При этом "сход" с базовой программы набора,
выполняемый по команде "Вертикаль", осуществляется при достижении ис-
требителем высоты Н = На .
Типовые участки полета. Весь профиль полета на перехват и привод на
аэродром посадки в общем случае может быть разбит на 11 участков
(рис. 4.2.4), три из которых являются балансными (два при наведении: крей-
серский длиной SКР, проходимый на высоте Н = НКР со скоростью
V = VKP, и программный длиной SN , проходимый на высоте Н = HN со
скоростью V — VN , и один участок на приводе длиной Snp, проходимый на
высоте Н — Икр со скоростью V = V КР ). Наименование этих участков при-
ведено на рис. 4.2.4. Следует иметь в виду, что участки 1-го разгона и набора
(j=0 и j=l) могут выполняться как на форсаже, так и без него, а на приводе
может после торможения производиться либо набор высоты при V — УКР с
На на Н КР (при На < НКР), либо снижение при Vnp = const с На на
Н /:р ; как в том, так и в другом случае после завершения балансного участка
выполняется снижение при Vnp = const на скорость УПОС и высоту Нтс
захода на посадку. Разбиение профиля полета на указанные участки позволяет
затабулировать характеристики (время, путь и расход топлива) неустановив-
шихся по Н или V участков полета, что, как будет показано далее, необходимо
для решения задачи определения возможности и параметров перехвата.
Рис. 4.2.4. Типовые участки полета на перехват и привод
Методы наведения истребителей
Классификация методов наведения. Методы наведения, устанавливаю-
щие зависимость управляющих воздействий (команд наведения) от координат
и параметров движения цели и истребителя, по принципу управления курсом
истребителя могут быть разделены на три группы:
388
• в первой вектор скорости истребителя направляется непосредственно на
цель (неупреждающий метод наведения "погоня");
• во второй обеспечивается движение истребителя в некоторую упрежден-
ную относительно цели точку - точку встречи, а упреждение либо непо-
средственно рассчитывается на основании гипотезы о равномерном и
прямолинейном движении цели (упреждающие методы наведения "пере-
хват" и "маневр"), либо формируется так, чтобы скорость вращения ли-
нии визирования была равна нулю (метод "параллельное сближение");
• в третьей достигается максимум некоторого критерия качества (напри-
мер, минимума математического ожидания времени перехвата) при за-
данном распределении плотности вероятности маневров цели в буду-
щем - вероятностный метод наведения [4.13, 4.14].
Принцип управления курсом
полета истребителя либо может
обеспечивать (с некоторой вероят-
ностью) угол встречи с целью, близ-
кий к заданному (методы наведения
типа "маневр"), либо нет (остальные
методы).
Метод наведения "параллель-
ное сближение" при постоянных
скоростях истребителя и цели обес-
печивает параллельное самой себе Рис. 4.2.5. Метод наведения "
перемещение ЛИНИИ визирования, параллельное сближение"
что достигается соблюдением равенства проекций на нормаль к ней их скоро-
стей: Уц sin q = УИ sin ср, где q, Q = л — q (рис. 4.2.5) и ср - углы между ли-
нией визирования и векторами скорости цели и истребителя.
Отсюда имеем
sin^ = osin<7, (4.2.1)
где а = Уц УИ .
Проецируя скорости цели и истребителя на линию визирования, получаем
выражение для определения скорости уменьшения расстояния L между ними
dL dt = Уц cos q — УИ cos ср. Это выражение позволяет получить следующую
формулу для расчета времени перехвата (в момент перехвата!, = LK = 0 ):
_ dL_______________________Ц______________
17ц cos q-У„ cos <р УИ-^\ — a2 sin2 q — Уц cos q (4’2‘2)
Так как
хп = гп cos^; Уп = гп sin^; ГП = = ^1хп+Уп’ выражение
(4.2.2) можно преобразовать к следующему виду:
(х/7 — Dn() + уп = 1ПС,
где Dnc alпс, 1ПС
а
1 — а2
£0-
389
Эти зависимости свидетельствуют о том, что геометрическим местом
встречи истребителя с целью, т. е, рубежом перехвата, при различных направ-
лениях движения цели является для разных значений а семейство окружно-
стей с радиусами 1ЦС и центрами, смещенными относительно цели на Dll( и
расположенными вне отрезка ИЦ (рис. 4.2.6): при а < 1 ( DIIC > 0) - за це-
лью, а при а > 1 (DIIC < 0) - за истребителем. При а = 1 (Уи - V[() окруж-
ность вырождается в прямую.
Несмотря на симметричность расположения окружностей, возможности
перехвата для а > 1 и а < 1 принципиально различны. Если а < I , то кине-
матически, т. е. без учета всякого рода ограничений и ошибок, перехват цели
возможен при любом направлении ее полета. Если а > I, перехват возможен
в случае, когда цель летит навстречу истребителю с курсом, лежащим в сек-
торе с углом при вершине, равным 2QV . Значение Qr определяется из (4.2.1)
при sin <р = (sin ^9)пих = 1: Qv = arcsin (1/a).
Рис. 4.2.6. Рубежи перехвата методом "параллельное сближение"
При Q < Qv существуют два решения (см. рис. 4.2.6). Однако второе из
них, соответствующее дальнему от цели, практического интереса нс пред-
ставляет, так как в этом случае в роли "догоняющего" оказывается не истре-
битель, а цель.
Метод наведения "погоня" Полагая скорости истребителя и цели по-
стоянными и проецируя их на линию визирования и нормаль к ней, получим
следующие уравнения:
— = V., cos q - Vн; L — = -Vu sin q.
dt ц И dt ц
390
Выполнив их интегрирование и перейдя к полярным координатам г, q
(рис. 4.2.7, а), имеем гпог = Vl(tn = Dnc cos <7 + lnc.
На рис. 4.2.7, б, где для некоторого значения а<1 приведены рубежи пе-
рехвата цели методами "параллельное сближение" и "погоня", видно, что ис-
кривление траектории наведения, свойственное методу "погоня", приводит к
более позднему перехвату. При q = 90° относительное увеличение времени
Рис. 4.2.7. Траектория наведения (а) и рубежи перехвата (б)
391
Из этого равенства следует, что при а = 0,8 inr = 1,67, а при а = 0,9
tnr = 2,3. При q, несколько больших 90°, соответствующие значения
tnA имеют еще большие величины. Например, при а — 0,8 (tnr )max = 1,887
достигается при <7 = 112°.
Таким образом, применение метода "погоня" в процессе всего наведения
явно нецелесообразно. Однако этот метод имеет то преимущество, что в от-
личие от любого упреждающего метода, на результаты применения которого
оказывают влияние ошибки в определении вектора скорости цели, он практи-
чески не чувствителен к радиолокационным ошибкам и маневрам цели по
курсу. Поэтому его применение может оказаться целесообразным в случаях,
когда истребитель уже выведен в заднюю полусферу маневрирующей цели.
Метод наведения "перехват". Рассмотренные выше методы наведения
не учитывали того обстоятельства, что скорость истребителя, точнее, системы
"истребитель-ракета" в процессе наведения не остается постоянной, а изменя-
ется от нуля на пассивном этапе подготовки истребителя к взлету после полу-
чения команды на перехват до скорости полета ракеты в процессе атаки цели.
Неучет этого при наведении методом "параллельное сближение" приведет к
утрате "параллельности" сближения, т. е. к вращению линии визирования и,
следовательно, к искривлению, а значит, удлинению траектории наведения и
"уходу" рубежа перехвата в процессе наведения. Учесть переменность скоро-
сти системы "истребитель-ракета" можно следующим образом.
Обеспечение равенства суммы пассивного (если истребитель еще не взле-
тел) и полетного времени истребителя и ракеты с временем полета цели до
точки ее встречи с ракетой (а это необходимое условие перехвата) достигает-
ся путем определения продолжительности балансного участка полета, прохо-
димого со скоростью VE = VKP либо VE = VN . Поэтому при расчете времени
наведения методом "перехват" следует полагать
уц
а = а Б =--, а отличие VE от значения средней скорости системы Vcp
УБ
на остающемся до точки встречи участке траектории наведения, кроме ба-
лансного, учитывать путем фиктивного смещения положения цели относи-
тельно истребителя вдоль вектора ее скорости в "присоединенную" точку, на-
ходящуюся от реальной цели на расстоянии
S
= Уц(С ~ТГ)’ ГДе С =*на +*ПЛС’’ ~ ВРеМЯ И ГОриЗОНтаЛЬ-
' Б
ная составляющая пути, потребные на набор высоты и скорости атаки и на ее
выполнение, включая время подготовки к пуску ракеты и время ее полета до
цели; tnAC - пассивное время, потребное для подготовки к взлету из соответ-
ствующей степени боевой готовности (для истребителя, находящегося в воз-
ДУхе> tnAC = 0).
Смысл этой операции легко понять из рис. 4.2.8, на котором для случая пе-
рехвата на встречных курсах показано влияние наличия пассивного времени и
переменности скорости системы "истребитель - ракета" на положение рубежа
392
Рис. 4.2.8. Влияние наличия пассивного времени и переменности скорости полета
системы "истребитель-ракета" на положение рубежа перехвата
перехвата. На этом графике все участки полета истребителя (условимся далее
для сокращения под термином "истребитель" понимать систему "истребитель -
ракета") со скоростью V ФУБ вынесены на начальный этап зависимости £(/).
Вместо выражения для расстояния Д5^ удобнее пользоваться выражени-
ем Д5на = Д5^ / аБ = VEtHa — SHa, значение которого не зависит от скорости
цели и определяется только характе-
ристиками истребителя и значением
балансной скорости. Поскольку
4 = S»a iVCP ’ ЯСНО’ ЧТО при VСР > VБ
&S,ia<Q и наоборот.
Выведем формулу для расчета
рубежа перехвата рассматриваемым
методом. Воспользуемся правой сис-
темой координат П, Б с началом, сов-
падающим с целью, и осью П, на-
правленной по вектору ее скорости.
Из условий временного и путевого
балансов имеем (рис. 4.2.9):
ha + Т Б ~^Ц ->
Рис. 4.2.9. К расчету координаты Пп н точки
встречи при наведении методом "перехват"
S„a +VErB=S = -Ппп)2 + ,
где тБ - время полета на балансном участке; ty - время полета цели до рубе-
жа перехвата.
393
Определив тБ из первого уравнения и подставив его во второе, получим
_ ^ни = И ~^Ц ty ) + Б И .
Разрешив это квадратное относительно Пп п = УЦ1Ц уравнение, после
преобразований имеем
ПГ1.п - + yin2 + (1-аБ }Б2И ] + аБББна, (4.2.3)
1 - аБ
где 77 = 77;/ - ahkSHU . В частном случае БИ - 0 эта формула упрощается и
приобретает вид
(^//т/)с„=о =Т“ №Slul ± ^//)’ (4.2.4)
1 ± ак
ь
где знаки плюс соответствуют случаю ПИ > аБд31Ш = 8S„a, а знаки минус
случаю ПИ <аББ8ца. При аБ = 1 формула (4.2.3) приводит к неопределен-
ности типа 0/0. После ее раскрытия
1 — Б2 1 Б2
(П!1П)а1М = ЧП+—) + М„а = -(П„ + Д8,и1 (4.2.5)
4 уу 2 ии Ло„о
Для современных истребителей, имеющих зоны возможных атак, близкие
к круговым, наиболее часто применяется именно метод наведения "перехват",
поскольку он обеспечивает минимум времени перехвата.
Методы наведения типа "маневр". Для истребителей, не обладающих
круговыми зонами возможных атак, а также при координированных действи-
ях нескольких истребителей по групповой цели (см. п. 4.4.4), необходимо
обеспечить возможность выведения истребителя в атаку под углом к цели,
близким к заданному значению. Для этого необходимо применение метода
"маневр", траектория наведения которого (рис. 4.2.10) с учетом необходимо-
сти выполнения разворота на курс наведения после взлета в общем случае со-
стоит из двух окружностей радиусов и 7?0, трех прямых длиной d. Sh lK .
на последней из которых, направленной под заданным углом у7к к курсу це-
ли, осуществляется выполнение атаки.
Параметры d и Rt при взлете истребителя с аэродрома можно задавать в
виде некоторых констант, а рациональные значения , 1К и у/к определять
заранее в функции типа истребителя и номера W программной скорости
(при перенацеливании истребителя на сверхзвуковых скоростях = /?() ).
При/?! = 7?0
J V = + а„ = у/к - ^) + (sign Ro) 2 к л,
где k = 0 при (sign R<>)(v*-Vo) > 0, k = 1 при (sign Ro)(v*-v0) <0, y70 на-
чальный курс истребителя относительно курса цели.
394
В остальных случаях значения и знаки углов разворота ах и могут
быть определены итерационным путем [4.15]. Будем полагать, что они из-
вестны. Тогда неизвестной остается только длина прямой S] между разворо-
тами. Для ее определения, а следовательно, и расчета координаты Пп м ру-
бежа перехвата необходимо выполнить показанную на рис. 4.2.10 операцию,
при которой значение Sj остается неизменным, и рассчитать значения коор-
динат 1П, 1Б точки 1 относительно точки встречи:
/я = (sin^//Л -si n^z,) + /?,(siny/,-sin^0) + lK cosy/K + dcos^0;
ll: - -R0(cosy/K - cosy/l) - (cos^]- cos^/()) + lK sini//K + dsin y/0,
где значение ij/x при R} Ф R(l определяется в итерациях.
Рис. 4.2.10. Расчетная схема наведения методом "маневр"
Поскольку траектория наведения методом "маневр" не прямолинейна, в
исходную систему уравнений помимо временного и путевого балансов следу-
ет добавить уравнение баланса путей перехвата в горизонтальной и верти-
кальной плоскостях. При наличии одного балансного участка имеем:
395
*
02.6)
*$1 =\П„-(Ппм-^/7)] +(^//+^) —Щи+1П—Уц1ц) +(Би+1б) ,
S) + Ct, 7?| + ct(iRfl + d +1к — Sн + Sa + УЕтЕ,
где 1К равно пути атаки Sa.
Выразив значение тБ из первого уравнения и подставив его в третье, по-
лучим 5) = УБ1Ц — Б8на//, где Б8наК — VEtи — SH + ££[./?] + ct0RG + d + УБ1а,
ta - время атаки, т. е. время, потребное на подготовку к пуску ракет после
выхода истребителя на прямую 1К и на полет ракеты к цели.
Подставив выражение для S) во второе уравнение системы (4.2.6), после
преобразований получим искомую формулу для расчета положения рубежа
перехвата методом "маневр":
Ппм =Т^[-аБП + 7/72+(1-«|)^2] + аБЛ8наК, (4.2.7)
1-а£
где П = П ц + 1П — аЕБ8наК, Б — Би + 1Б.
Естественно, что при Б = Би = 0, т. е. при перехвате на чисто встреч-
ных или догонных курсах, это выражение сводится к формуле (4.2.4), а при
аБ - 1 - к формуле (4.2.5) с заменой П на П, Би на Б и Б8иа на Б8наР.
При неизмененных значениях параметров наведения ii/K,lK,R^ коорди-
наты точки 1 (см. рис. 4.2.10) могут быстро изменяться, так как они связаны с
положением точки встречи, определяемым курсом цели, который рассчиты-
вается с ошибками и может вообще существенно измениться из-за маневра
цели. Поскольку в это время положение истребителя в пространстве сущест-
венно не меняется, направление касательной к окружности основного разво-
рота при приближении истребителя к ней может резко изменяться от команды
к команде, что весьма осложняет пилотирование. Кроме того, в процессе вы-
полнения разворота истребитель может оказаться внутри окружности, что во-
обще приведет к срыву перехвата из-за невозможности построения касатель-
ной. Это заставляет осуществлять регулирование величины параметров наве-
дения, что весьма осложняет решение задачи в процессе наведения и привело
к разработке целого семейства методов наведения типа "маневр".
Определение возможности и параметров перехвата
При наведении истребителя (группы) целесообразно обеспечить минимум
глубины проникновения цели на обороняемую территорию. При этом опреде-
лению подлежат следующие параметры, обеспечивающие минимум времени
перехвата:
• метод наведения;
• полусфера атаки (для метода наведения "маневр");
396
• номер W программной скорости VN ;
• номер п вида программы полета на перехват или момент включения фор-
сажа;
• время перехвата;
• положение рубежа перехвата.
Если наведение оказывается невозможным из-за нахождения цели вне зо-
ны боевого применения истребителя по высоте или скорости ее полета, а так-
же недостаточности запаса топлива или скорости полета истребителя (в по-
следнем случае подкоренные выражения (4.2.3), (4.2.7) оказываются отрица-
тельными числами), то причина невозможности должна быть установлена.
Кроме того, может оказаться, что рубеж перехвата находится в области, огра-
ниченной кривой п = 0 (см. рис. 4.2.2). Это потребует перехода к методу "ма-
невр" для увеличения времени и пути перехвата и обеспечения равенства
= hi = haR ’ поскольку иначе истребитель не успеет к моменту начала ата-
ки набрать необходимые для ее успешного выполнения значения На и Va .
Назначение метода наведения и полусферы атаки. При некоордини-
руемом наведении истребителей с зонами возможных атак, близкими к круго-
вым, следует назначать метод "перехват", а для истребителей устаревших ти-
пов, способных, как правило, атаковать цели лишь из их задней полусферы, -
метод "маневр".
Назначение программной скорости. При наведении методом "перехват"
назначается наименьшее из значений VN, удовлетворяющее неравенству
all(VN > Уц, где аПС - некоторая константа, близкая, но несколько большая
единицы (при аПС » 1 маневр цели может привести к срыву перехвата из-за
недостатка скорости истребителя). При этом должно быть выполнено условие
max(^0 > причем минимальная и максимальная для дан-
ного типа истребителя высоты перехватываемой цели зависят от программной
скорости.
При наведении методом "маневр" назначается минимальное значение VN ,
обеспечивающее возможность перехвата цели по скорости (с некоторым запа-
сом) и высоте ее полета.
Назначение вида программ. Несмотря на выбор наиболее экономного по
расходу топлива значения VN при чисто форсажном полете на перехват
(«=/), топлива для его выполнения и привода на аэродром посадки может
оказаться недостаточно. При этом для определения номера п вида программы
можно вначале для каждого значения п, N и Нц рассчитать и затабулировать
радиусы действия истребителя и соответствующие им времена полета, что по-
зволяет определить для каждого п потребные дальности обнаружения цели,
сравнение которых с фактическим положением цели позволит задать значе-
ние п [4.13, 4.14]. Однако для современных возможностей компьютеров целе-
сообразно воспользоваться методом, изложенным далее.
Определение времени и рубежа перехвата. Невозможность перехвата по
запасу топлива при п=1 сильно осложняет решение задачи, поскольку при
397
этом для обеспечения минимума времени перехвата приходится использовать
уравнение топливного баланса, что приводит к необходимости решения урав-
нения четвертой степени. Этого можно избежать, если применить метод, суть
которого сводится к следующему (подробнее см. [4.16]).
Положим п = 2 и по (4.2.3) или (4.2.7) рассчитаем опорное значение
Пп = П°п и значение топлива, потребного для выполнения перехвата и при-
вода. Если это значение больше располагаемого запаса, то для экономии топ-
лива форсаж следует включать не в момент выхода истребителя на Н — Нкр,
а несколько позже. В обратном случае форсаж следует включать раньше,
т. е. в процессе выполнения истребителем участка первого набора высоты
(см. рис. 4.2.4).
Для определения конкретного оптимального момента включения форса-
жа, при котором все топливо, располагаемое для перехвата и привода (с уче-
том необходимых резервов), будет использовано, что обеспечит минимум
времени перехвата, следует значение путей наведения и привода, соответст-
вующих искомому положению рубежа перехвата, выразить через значения
этих путей для опорного положения рубежа перехвата (рис. 4.2.11). Из этого
рисунка следует, что
СР
е __ г* 0 z rj п® 3 COS а уу о j-fft \ СР
-$и ~<ЛП - $п ~(Пп -/7/?)cosayy ,
cos Ла
= (&„ -а^)/2; cos Да «1; а^р
= |(ая
+ аи).
где Да = аи - аи
Рис. 4.2.11. Опорное (--------) и искомое (-------) решения
задачи наведения
Аналогичная формула
имеет место и для пути приво-
да S пр.
Поскольку значение аи
является величиной искомой,
расчет путей требует выполне-
ния итераций. Однако их число
не превышает двух, а при
< 45° можно приближенно
ср о
полагать cos а и — cos а и.
Использование этого при-
ема, а также линеаризация
[4.16] зависимости времени
первого и второго наборов от
высоты, которая мало влияет
на точность расчета Пи, по-
зволяют полученный дисба-
ланс топлива ДС° пересчитать в изменение времени перехвата Дг, опреде-
лить времена полета теперь уже на двух балансных участках ткр и TN и най-
ти искомое оптимальное положение рубежа перехвата по формуле
398
Пп = П°п + ИцДг.
Если при этом оказывается, что все располагаемое топливо использовать
невозможно, то это означает, что п должно быть равно 1, Если же распола-
гаемый запас топлива не обеспечивает возможность достижения истребите-
лем необходимых значений На или даже VN , то это означает невозможность
перехвата по топливу.
В настоящее время рассмотренный метод решения штурманской задачи
вполне может быть реализован на борту истребителя и использован при вы-
полнении режима бортового наведения.
Необходимые ЛТХ истребителей и метод их расчета
Для решения рассмотренной выше задачи расчета рубежа необходимо
шание следующих групп характеристик истребителей и их вооружения:
• программные скорости VN, граничные высоты и скорости полета пере-
хватываемых целей;
• время, путь и расход топлива на всех участках наведения и привода, при-
веденных на рис. 4.2.4;
• высота и скорость полета, а также километровые (или секундные) расхо-
ды топлива на всех балансных участках полета;
• характеристики системы вооружения истребителя, включая зависимость
высоты атаки от Н ц;
• дроссельные расходы топлива в зависимости от Н а при V — VN\
• начальный запас топлива и его резервы на парирование маневров цели,
посадку в сложных условиях и т.п.;
• рекомендуемые значения d, Rt, R(), lK, ук;
• пассивное время для разных степеней готовности и различного численно-
го состава группы истребителей.
Расчет характеристик j-х участков полета может быть выполнен путем
численного интегрирования по следующим формулам [4.14]:
t = ? . с = 7 ^2.. с = Y а
' J Ии ’ 7 J и ’ 7 •> ("" и
Н,(у-1) ГНХ ИД/-1) НХ Н,(у-1) ПХ
где Нэ =
V2
Н + ’ Я км
2g
- километровый расход топлива; пх - продольная пе-
регрузка.
Если поляру самолета, т. е. зависимость коэффициента сопротивления
самолета СЛ от коэффициента подъемной силы Су, считать квадратичной
параболой Сх = С+ ДСр, что обычно имеет место (по крайней мере для
используемых в рассматриваемой задаче значений Су), то выражение для
расчета и v можно записать в следующем виде:
399
„ - -____ АГ ц2
СУ1
где Р, Q, Gc - тяга двигателя, сопротивление и масса самолета;
СЛ/> = Ср — Сх0 - коэффициент избытка тяги над безындуктивным сопротив-
лением; Crl=Gc QJSKPpM2 - коэффициент подъемной силы при нор-
мальной перегрузке nY — Y / Gc = 1 (здесь Y - подъемная сила); SKP - пло-
щадь крыла самолета; р - давление воздуха на высоте полета в кг/м2.
Для упрощения расчетов эту формулу можно записать в следующем виде:
~р _ G _ 2
=—пп-------п,п.,, (4.2.8)
G р
Рн — G, —
где р= ; G =~-------------; и0 = Сдр / Сп =/( Л/) (при //>11 км);
Рн--() ^с.ст
Сух = ^=CYt = GccT nl=ACYi = F(M); GCCT - некоторое зна-
G QJSppPn-pM
чение массы самолета, принятое за стандартное. При //<11 км в отличие от
//>11 км стандартная температура воздуха уже не остается постоянной. По-
этому п0 оказывается зависящим и от Н. Аналогично при //>11 км
= Ч^н^Рн /Рн=и ’ гДе , а при // < 11 = F(M,H}.
Формулой (4.2.8) особенно удобно пользоваться при Н >11 км, т. е. на
высотах, где выполняется большое число участков полета на перехват. Одна-
ко для этого необходимо иметь зависимости См,(М) и Д(Л/), полученные
по данным летных испытаний истребителя и результатам продувок в аэроди-
намических трубах. Если эти зависимости имеются, то характеристики набо-
ров высоты при V — const могут быть рассчитаны и аналитически [4.14].
4.2.3. Методы решения задач целераспределения
и перенацеливания истребителей
Принципы решения задачи целераспределения
Основная задача истребителей-перехватчиков - оборона объекта или объ-
ектов на охраняемой территории от ударов средств воздушного нападения,
причем для ИА, в отличие от ЗРК, типична оборона именно многих объектов.
Естественным мерилом качества целераспределения (ЦР) является оценка ве-
личины предотвращенного ущерба, т. е. разности между ущербом, наноси-
мым противником обороняемым объектам при отсутствии противодействия
истребителей и при наличии такового. Однако практическое использование
этого критерия невозможно как в силу его нелинейности и стохастичности
400
(методы решения таких задач еще только разрабатываются), так и вследствие
того, что достоверность определения входящих в него величин весьма низкая,
в основном из-за неизвестности намерений противника. Поэтому в качестве
критерия эффективности ЦР обычно используется математическое ожидание
относительного числа пораженных целей. Однако для ИА применение этого
критерия рационально лишь при обороне конкретного объекта (например, ор-
дера кораблей), да и то если известна дальность действия оружия средств воз-
душного нападения (СВН).
Действительно, основной задачей средств обороны является защита объ-
ектов обороны, а не уничтожение СВН. При обороне конкретного объекта и
известной дальности Dp пуска ракет с СВН поражение целей на любых даль-
ностях, превышающих Dp, обеспечивает выполнение основной задачи. Од-
нако при обороне многих объектов и отсутствии информации, по каким из
них будут действовать средства противника, важно не только поразить цель,
но и сделать это до того, как она выполнит свою боевую задачу. Так как эта
задача неизвестна, то сделать это желательно как можно раньше, т. е. при ми-
нимальном проникновении цели на обороняемую территорию. Поэтому эф-
фективность назначаемого воздействия целесообразно оценивать вероятно-
стью его боевого успеха
^.у=рп(У-РцУ (4.2.9)
где рп — вероятность перехвата цели; - вероятность того, что цель вы-
полнит свою задачу до ее перехвата.
В такой постановке задача целераспределения может быть, в принципе,
решена методами математического программирования [4.17], т. е. путем ре-
шения матрицы ЦР размерностью z х j, где z и j - число целей и истребите-
лей, участвующих в данном акте ЦР, обеспечивающего максимум математи-
ческого ожидания (РБУ, по всем воздействиям. Однако применение этих ме-
тодов нецелесообразно по следующим причинам (не говоря уже об их
сложности).
Во-первых, эффективность матричного целераспределения по сравнению
с методом последовательного назначения воздействий (см. далее) тем выше,
чем большее число объектов подлежит распределению. Однако цели в зону их
обнаружения, как правило, поступают не одновременно, а последовательно.
Поэтому задержка в решении задачи ЦР для накопления достаточного числа
новых целей приведет к увеличению глубины их проникновения, т. е. к сни-
жению .
ЬУ
Во-вторых, в силу указанных причин, а также благодаря априорной неоп-
ределенности общего количества целей, которые будут участвовать в налете,
уровень точности решения задачи ЦР не может быть высоким. Следователь-
но, согласно принципу "равнопрочности" [4.6] применение точных методов
решения задачи, сформулированной приближенно, не приведет к сколько-
нибудь существенному увеличению точности ее решения.
401
26 - 4094