





















































































































Text
СОВРЕМЕННЫЕ ПРОБЛЕМЫ ФИЗИКИ
В.А. ВАСИЛЬЕВ
Ю.М. РОМАНОВСКИЙ
В.Г. ЯХНО
АВТОВОЛНОВЫЕ
ПРОЦЕССЫ
Под редакцией д.с. ЧЕРН АДСКОГО
Серия выпускается под общим руководством
редакционной коллегии журнала
’’Успехи физических наук”
МОСКВА ’’НАУКА”
ГЛАВНАЯ РЕДАКЦИЯ
ФИЗИКО-МАТЕМАТИЧЕСКОЙ ЛИТЕРАТУРЫ
19 8 7
ББК 22.311
В19
УДК 539.2
Васильев В.А., Романовский Ю.М., Я х н о В.Г.
Автоволновые процессы./Под ред. Д.С. Чернявского. - М.:
Наука. Гл. ред. физ-мат. лит., 1987. - (Соврем, пробл. фи-
зики). — С. 240.
Приводится обзор основных экспериментальных фактов автовол-
новых процессов из физики, химии и биологии. Предлагается клас-
сификация этих данных. Строятся основные типы математических
моделей и проводится их качественный анализ. Рассматривается роль
флуктуаций. Внимание сосредоточивается на проблемах образования
структур в системах, далеких от термодинамического равновесия,
синхронизации, генерации и распространения автоволн, перистальти-
ческих течений.
Для физиков, математиков, биологов. Будет полезна также сту-
дентам и аспирантам, интересующимся проблемами синергетики.
Табл. 4. Ил. 94. Библиогр. 278 назв.
Рецензент
доктор физико-математических наук Ю.Л.Климонтович
Владислав Андреевич Васильев
Юрий Михайлович Романовский
Владимир Григорьевич Яхно
АВТОВОЛНОВЫЕ ПРОЦЕССЫ
Серия ’’Современные проблемы физики”,вып. 73
Редактор Л.П. Русакова
Художественный редактор Т.Н. Кольченко
Технические редакторы С.В. Геворкян, В.Н. Никитина
Корректоры Н.П. Круглова, Т.А. Печко
Набор осуществлен в издательстве
на наборно-печатающих автоматах
ИБ № 12945
Сдано в набор 19.01.87. Подписано к печати 28.04.87 Т—122 15
Формат 84 X 108 1/32.Бумага книжно-журнальная
Гарнитура Пресс-Роман. Печать офсетная
Усл. печ. л. 12,60. Усл. кр.-отт. 12,60. Уч.-изд. л. 14,25 ’
Тираж 5100 3КЗ. Тип. зак. 606. Цена 2р. 20 к.
Ордена Трудового Красного Знамени
издательство ’’Наука”
Главная редакция физико-математической литературы
11 7071 Москва В-71, Ленинский проспект, 15
4-я типография издательства ’’Наука”
630077 г. Новосибирск-77, ул. Станиславского, 25
© Издательство "Наука”.
1704020000-123 Главная редакция
В---------------91-87 физико-математической
053(021-87 литературы. 1987
ОГЛАВЛЕНИЕ
Предисловие ....................................................... 6
Глава 1. Автоволвовые процессы и их роль в естествознании.... 9
1.1. Автоволны в неравновесных системах......................... 9
1.2. Математическая модель автоволновой системы................ 11
1.3. Классификация автоволновых процессов...................... 12
1.4. Основные экспериментальные данные......................... 13
Глава 2. Физические предпосылки построения базовых моделей .... 26
2.1. Конечная скорость взаимодействия. Редукция телеграфных
уравнений.................................................... 26
2.2. Непинейное уравнение диффузии. Конечная скорость диф-
фузии ....................................................... 32
2.3. Диффузия в многокомпонентных гомогенных системах ... 35
2.4. Интегро дифференциальные уравнения и их редукция к базо-
вой модели................................................... 41
2.5. Примеры базовых моделей автоволновых систем............... 44
Глава 3. Приемы исследования автоволновых систем.................. 51
3.1. Основные этапы исследования............................... 51
3.2. Исследование устойчивости стационарных решений............ 55
3.3. Аксиоматический подход.................................... 60
3.4. Дискретные модели........................................ 62
3.5. Быстрые и медленные фазы пространственно-временных
процессов ................................................... 66
3.6. Теоретико-групповой подход................................ 76
3.7. Численный эксперимент.................................... 77
Глава 4. Распространение фронтов и импульсов...................... 82
4.1. Стационарный фронт возбуждения............................ 82
4.2. Пример процессов установления............................. 85
4.3. Пульсации скорости фронта................................. 88
4.4. Формирование бегущего импульса............................ 93
4.5. Распространение импульсов в среде с плавными неоднород-
ностями ..................................................... 99
4.6. Импульсы в среде с немонотонной зависимостью И = И(у) . . 101
4.7. Импульсы в триггерной системе............................ 103
3
Глава 5. Автономные источники воли.............................. 106
5.1. Источники типа’’эхо” и "делящийся фронт”................ 106
5.2. Генерация бегущих импульсов иа границе ’’ждущей” и ’’триг-
герной” сред................................................ 111
5.3. Стабильные ведущие центры............................... 113
5.4. Стоячие волны .......................................... 121
5.5. Ревербераторы. Качественное описание.................... 128
Глава 6. Сиихроиизацвя автоколебаний в пространстве как фактор
самоорганизации................................................. 135
6.1. Фазировка автоколебаний в однородных системах........... 136
6.2. Синхронизация в неоднородных системах. Случай эквидис-
тантных расстроек .......................................... 137
6.3. Сложные автоволновые режимы, возникающие при наруше-
нии синхронизации........................................... 143
6.4. Синхронные сети автогенераторов в современной радио-
электронике ................................................ 146
Глава 7. Стационарные пространственно неоднородные состоянии.
Диссвпативвые структуры......................................... 149
7.1. Условия существования стационарных неоднородных ре-
шений ...................................................... 149
7.2. Ветвление решений и квазигармонические распределения . . . 155
7.3. Множественность структур и их устойчивость.............. 161
7.4. Контрастные диссипативные структуры..................... 169
7.5. Диссипативные структуры в системах со взаимной диф-
фузией ..................................................... 180
7.6. Локализованные диссипативные структуры.................. 182
7.7. Метастабильные диссипативные структуры в однокомпонент-
ных системах................................................ 185
Глава 8. Шумы в автоволновые процессы........................... 192
8.1. Источники шумов в активных кинетических системах и ос-
новные стохастические задачи................................ 193
8.2. Среднее время существования простейшей экологической
системы хищник - жертва..................................... 199
8.3. Естественные шумы в распределенных системах и простран-
ственная самоорганизация.................................... 202
8.4. Внешние шумы и диссипативные структуры. Линейная
теория...................................................... 206
8.5. Нелинейные эффекты. Двухъящечная модель. Распределен-
ные мультипликативные шумы.................................. 209
Глава 9. Автоволновые механизмы транспорта в живых каналах ... 213
9.1. Автоволны в органах желудочно-кишечного тракта ......... 214
9.2. Волны в малых кровеносных сосудах с мышечной стенкой . . 215
9.3. Автоволновые явления в плазмодии миксомицета............ 218
Заключение...................................................... 227
Список литературы............................................... 230
Дополнительный список литературы................................ 240
4
” ... В сложной области нелинейных колебаний еще в большей мере, чем
это уже имеет место сейчас, выкристаллизуются свои специфические общие
понятия, положения и методы, которые войдут в обиход физика, сделаются
привычными и наглядными, позволят ему разбираться в сложной совокуп-
ности явлений и дадут мощное эвристическое оружие для новых иссле-
дований.
Физик, интересующийся современными проблемами колебаний, должен,
по моему мнению, уже теперь участвовать в продвижении по этому пути. Он
должен овладеть уже существующими математическими методами и
приемами, лежащими в основе этих проблем, и научиться их применять”.
Л.И. Мандельштам
(Предисловие к книге А.А. Андронова, А.А. Витта и С.Э.Хайкнна
’’Теория колебаний”, 193S.)
Может быть, мы обязаны науке
больше, чем какому-либо другому
виду человеческой деятельности,
возникновением чувства необходи-
мости коллективных усилий.
Ф. Жолио-Кюри
ПРЕДИСЛОВИЕ
Наука об автоволновых процессах молода. Основные ее понятия
и методы находятся в процессе становления, а поле приложений в
различных областях естествознания расширяется день ото дня.
Яркие примеры различных автоволновых процессов наблюдают-
ся в эксперименте в физических, химических и биологических
лабораториях самого разного профиля. Однако можно считать, что
если когда-нибудь будет написана ’’история” открытия автоволн, то
никак нельзя будет пройти мимо трех ’’китов”, на которых она
зиждется: 1) наблюдение волн распространения пламени и волн
фазовых переходов, 2) открытие волн в химических реакторах
с автоколебательными окислительно-восстановительными процес-
сами и 3) исследование распространения возбуждений по нервным
волокнам. Теория автоволновых процессов прежде всего пользует-
ся методами, применяемыми при изучении нелинейных дискретных
и распределенных колебательных систем, математическими мето-
дами исследования нелинейных параболических уравнений и,
наконец, методами теории конечных автоматов. Важно отметить,
что теория автоволн многим обязана работам ряда замечательных
математиков, исследования которых предвосхитили эксперимен-
тальные открытия. Достаточно назвать работы Р.Фишера (1937 г.),
А.Н.Колмогорова, Г.И.Петровского и Н.С.Пискунова (1937 г.),
Н.Винера и А.Розенблюта (1946 г.), А.Тьюринга (1952 г.).
Интересно, что маститые математики обратились к биологиче-
ским задачам —именно раздумья об’’устройстве” жизни привлекли
их к постановке новых математических проблем. В конечном счете
к математическому успеху их привел учет двух фундаментальных,
одновременно действующих в распределенных активных системах
факторов: автокатализа и диффузии.
Важнейшей вехой в развитии теории автоволновых процессов
было создание А.Хочкиным и А.Хаксли моделей нервной проводи-
мости и модели Д. Нобла — распространения возбуждения по прово-
дящей системе сердечной мышцы. Эти модели - системы уравне-
ний в частных производных — описывали уже не ’’мысленные”, а
реальные эксперименты.
6
Мы вправе полагать, что советская школа математиков, физи-
ков, химиков и биологов располагает большим опытом и заслуга-
ми в исследовании автоволновых процессов. Поэтому не случайно,
что и сами термины ’’автоволновой процесс”, ’’автоволна” были
предложены замечательным советским физиком Р.В.Хохловым,
который глубоко понимал роль нелинейной теории колебаний не
только в радиофизике и механике, но и в смежных дисциплинах.
В частности, велик вклад советских ученых в теорию горения,
структурообразования Вселенной, распространения волн и образо-
вания страт в плазме, в химических реакторах, в живых тканях,
а также в теорию передачи сигналов в активных линиях.
В последние годы становится все более ясной роль идеи автовол-
новых процессов в становлении синергетики — науки о самооргани-
зации открытых и далеких от термодинамического равновесия
систем. Можно даже считать, что автоволны наряду с процессами
рождения ’’новой” информации в таких системах и являются дви-
жущими пружинами самоорганизации. Пониманию этой глубокой
связи во многом способствовали труды И. Пригожина и Г.Хакена.
Пожалуй, наиболее полное освещение вопросы, связанные с исто-
рией и новейшими достижениями науки об автоволновых процес-
сах, получили на международных симпозиумах, проведенных в ГДР
в январе 1982 г. и в марте 1985 г. и в СССР на симпозиумах в г.Тал-
лине осенью 1982 г. и в г.Пущино летом 1983 г., а также в Горь-
ковских школах по нелинейным волнам 1981 и 1983 гг. Несмотря
на это, изложение основных экспериментальных фактов и теории
автоволновых процессов поставило перед авторами ряд трудных
вопросов. Они связаны с отсутствием терминологии, трудностью
определения границ нового научного направления (как и всякого
научного направления, рождающегося на стыке различных дисцип-
лин) и, конечно, трудностями, связанными с литературными источ-
никами, которые разбросаны во многих книгах и самых разнооб-
разных периодических изданиях. К тому же все авторы относят се-
бя к физикам. Поэтому изложение математических вопросов ве-
дется на ’’физическом” уровне строгости.
Авторы подчеркивают, что настоящий труд является принци-
пиально коллективным, в нем не проводится разделение глав меж-
ду соавторами, а изложение представленного здесь материала не
было бы возможным без предварительного обсуждения со многи-
ми исследователями.
Авторы приносят свою глубокую признательность за благожела-
тельную поддержку и обсуждение ряда проблем С.А.Ахманову,
М.Т.Греховой, В.В.Мигулину, А.А.Самарскому, Е.В.Асташкиной,
Г. Барчу, С.И. Бейлиной, Б.Н. Белинцеву, Ю.М. Гальперину,
С.Д.Дренделю, Г.Г.Еленину, Ю.Д.Калафати, Ю.Л.Климонтовичу,
7
Б.Н.Клочкову, И.К.Костину, В.И.Кринскому, С.П.Курдюмову,
К.К.Лихареву, А.С.Логинову, И.И.Минаковой, А.С.Михайлову,
Г.Н.Непокойчицкому, М.С.Поляковой, А.В.Приезжеву, М.И.Раби-
новичу, С.А.Региреру, Н.В.Степановой, В.И.Сбитневу, А.П.Сухору-
кову, В.А.Теплову, И.В.Упорову, Р.Файстелю и другим.
Мы должны высказать глубокую благодарность инициатору
написания этой книги профессору Вернеру Эбелингу (Гум-
больдтский университет, ГДР). Без его постоянного внимания и
помощи рукопись не была бы доведена до той степени завершенно-
сти, которая была посильна авторам.
Мы также благодарны нашему научному редактору Д.С.Чернав-
скому, в многолетнем сотрудничестве с которым формировались
наши взгляды на различные аспекты теории автоволновых процес-
сов и ее биофизических приложений. Наконец, мы сердечно благо-
дарим Л.М.Андрианову и Н.И.Васильеву за помощь в оформле-
нии рукописи.
ГЛАВА 1
АВТОВОЛНОВЫЕ ПРОЦЕССЫ И ИХ РОЛЬ
В ЕСТЕСТВОЗНАНИИ
В развитии естествознания известны такие периоды, когда, ка-
залось бы, различные его области объединяются общими идеями
и методами. Такое взаимопроникновение всегда оказывалось
благотворным для взаимодействующих областей. Наше время
характеризуется все расширяющимся проникновением математи-
ки, а также различных методов экспериментальной и теоретической
физики в химию и биологию. Такой процесс контакта различных
наук продолжает приводить к формированию общих понятий и
закономерностей.
1.1. Автоволны в неравновесных системах
Одной из общих проблем, встречающихся при исследовании за-
конов живой и неживой природы, является формирование
’’языка”, применяемого для описания динамики распределенных
объектов, состоящих из многих взаимодействующих и находящих-
ся в состоянии, далеком от термодинамического равновесия, эле-
ментов. Примеры таких объектов весьма разнообразны. К ним от-
носятся полупроводниковые и магнитные пленки, химические
реакторы, в которых могут протекать процессы с автокаталитиче-
скими стадиями, распределенные сообщества живых организмов,
нервные волокна, коллективы нейронов, составляющих нервную
ткань, и многое другое.
Конечно, изучение всех этих сложных систем проводится давно,
и существуют прекрасные примеры описания их пространственно-
временной динамики. Однако сейчас появилась возможность клас-
сификации динамических процессов на ’’языке” автоволновых
процессов (АВП). Под АВП принято понимать самоподдерживаю-
щийся в активной нелинейной среде волновой процесс (включая
стационарные структуры), сохраняющий свои характеристики по-
стоянными за счет распределенного в среде источника энергии. Эти
характеристики - период, длина волны (или импульса), скорость
распространения, амплитуда и форма - в установившемся режиме
зависят только от локальных свойств среды и не зависят от началь-
9
ных, а достаточно далеко от границ среды и от краевых условий.
При этом в пространстве предполагается связь посредством процес-
сов переноса диффузионного типа. К настоящему времени, когда
изучению автоволн посвящено уже достаточно большое число ра-
бот, стало ясно, что именно АВП составляют ’’базисные” представ-
ления и дают общий математический язык, на котором оказывает-
ся возможным говорить об аналогичных типах пространственно-
временных явлений в самых разных по своей природе активных
средах. Описание свойств автоволн и составляет предмет настоящей
монографии. В главах 1 и 2 мы попытались дать определенную
классификацию разных типов АВП, указать основные эксперимен-
тальные факты из физики, химии и биологии об автоволнах,
а также изложить физические и математические приемы, с по-
мощью которых строятся их ’’базовые модели”. Математическим
методам анализа базовых моделей посвящена глава 3. Основные
типы АВ-явлений рассмотрены в главах 4—7. Стохастические
явления, связанные с АВП, рассматриваются в главе 8 и главе 6
(§6.3). Наконец, последняя глава 9 посвящена АВП в живых каналах.
Как уже говорилось в предисловии, наиболее близко изложение
касается той области, которую теперь принято называть теорией
самоорганизации или синергетикой. По этому поводу авторы при-
держиваются того мнения, что АВП являются одним из характер-
ных проявлений самоорганизации, происходящей в распределен-
ных, открытых и далеких от термодинамического равновесия
системах. Без возникновения таких структур и создания неодно-
родностей (градиентов) в неравновесной среде невозможно дейст-
вие такого фактора, как конкурентный отбор в предбиологических
и живых системах. Именно с конкурентным отбором связаны
рождение новой полезной информации и биологическая эволюция
в целом [56, 67, 162, 163, 194,196, 216].
Безусловно, основы теории синергетики и в том числе АВП
заложены фундаментальными достижениями современной статис-
тической физики неравновесных процессов. Именно эта теория
обеспечивает понимание синергетических процессов на уровне
взаимодействия отдельных атомов и молекул и обосновывает
переход на следующий кинетический уровень описания, в котором
в качестве переменных рассматриваются некоторые усредненные
величины, например концентрация реагирующих молекул. С совре-
менной статистической теорией неравновесных процессов читатели
могут ознакомиться, например, по [40, 96, 111, 178], а также по
книгам Шпрингеров ской серии ’’Синергетика”, выходящей
с 1976 г., под редакцией Г.Хакена.
Скажем заранее, что качественное описание АВП и методов их
исследования, которое проводится в монографии, конечно, не
10
претендует на полноту изложения тех проблем, с которыми сталки-
вается исследователь при изучении многоплановых явлений само-
организации. Тем не менее авторы надеются, что книга будет полез-
ной для читателей, занимающихся автоволнами в различных кон-
кретных средах, и что она поможет им при построении соответ-
ствующих математических моделей.
1.2. Математическая модель автоволновой системы
Сформулируем теперь достаточно общую математическую мо-
дель, описывающую процессы в активной распределенной кинети-
ческой системе.
Пусть Xi — взаимодействующие между собой компоненты.
В физике это — температура, концентрация ионов или вещества,
находящегося в состоянии сверхпроводимости, в химии - концен-
трация реагирующих веществ, в биологии — число тех или иных
объектов на единицу объема, площади или длины. Отметим сразу,
что очень часто физические, химические и биологические компонен-
ты ’’завязаны” вместе в одной достаточно сложной модели. Кине-
тические уравнения с учетом взаимодействия компонентов х,
и процессов их переноса суть квазилинейные параболические
уравнения.
Основой моделей обычно служат уравнения материального
баланса:
bXt ,, , ч
— = Fi(Xx,X2,...,Xn}-^Ii. (1-1)
ot
Здесь Ц — поток z-ro компонента:
п
It = Vxi - S £)lfcgradxfc, (1.2)
к = 1
где V — направленная скорость движения компонента, a Dik -
матрица коэффициентов диффузии. Ее недиагональные члены назы-
вают коэффициентами взаимной диффузии, т.е. учитывают по-
токи г-го ’’вещества”, индуцированные потоками (градиентами)
Л-го ’’вещества”. Оказывается, что взаимная диффузия отсутствует
только тогда, когда равны между собой все коэффициенты само-
диффузии Da (см. гл. 2).
Уравнения вида (1.1) описывают широкий круг процессов:
и образование турбулентности, и химическую кинетику в условиях
конвекции, и распространение волн в активных средах, и т.п.
Цель, которую ставят авторы в настоящей книге, — выяснить свой-
ства ’’упрощенной” модели. Однако, как будет показано в после-
11
(1.3)
дующих главах, даже упрощенная модель дает возможность
описать и понять огромный круг сложных явлений.
В простейшем случае одномерного пространства уравне-
ния (1.1)-(1.2) запишутся следующим образом:
dxj
— = F,(xbx2, ...,х„) +
ot
9 / " ЭхД
+ —I 2 ^,к(хъх2, ...,хп)— .
9r\fc = i Ъг /
Здесь, как и в (1.1), Ft ~ нелинейные функции, описывающие
взаимодействие компонентов. В ряде случаев нами рассматривают-
ся более общие модели, с учетом действующих флуктуаций, расши-
рением числа пространственных переменных и т.п. Однако, как пра-
вило, будут изучаться системы типа (1.3), в которых Dti = const,
a Dik = 0 (при i =# к). Краевые условия систем (1.1) - (1.3) опре-
деляются конкретными задачами, но наиболее часто используются
условия ’’непроницаемости” границ конечного отрезка [О, L ] :
Эх,-
Эг
(1.4)
= 0.
г = О
При этих условиях система максимально автономна и характер
АВП менее всего подвержен влиянию границ. Но самое главное -
такие условия характерны для широкого класса объектов.
Если перемешивание внутри ’’объема” [О, L] происходит доста-
точно быстро, то в любой его части процессы синхронны и система
описьп^тся так называемыми ’’точечными” уравнениями:
dX;
= F,(xb х2,..., х„). (1.5)
at
Формально от системы (1.3) к (1.5) можно перейти при
если длина системы L и другие параметры остаются постоянными.
Физически это означает, что переход к (1.5) отвечает нулевому
приближению по отношению характерных времен диффузии и
химических процессов.
1.3. Классификация автоволновых процессов
Опыт, накопленный теорией АВП, позволяет выделить типы на-
блюдаемых явлений. Это означает, что для неравновесной диссипа-
тивной распределенной системы можно указать базисный набор
структур. С помощью этих структур или образов можно либо про-
водить описание сложных движений, либо высказать предположе-
ния об условиях возникновения того или иного режима.
12
Известны следующие типы структур, наблюдаемых в однород-
ной активной среде: 1. Распространение уединенного фронта воз-
буждения (движение границы фазового перехода или фронта пере-
ключения) и бегущий фронт (БФ). 2. Распространение импульса
стабильной формы (БИ). 3. Автономные локализованные источни-
ки волн: режим ’’эхо” и стабильный ведущий центр (ВЦ). 4. Стоя-
чие волны. 5. Ревербератор. 6. Синхронные автоколебания в прост-
ранстве (СА). 7. Квазистохастические волны. 8. Стационарные во
времени неоднородные распределения в пространстве — диссипа-
тивные структуры (ДС) *).
В основе данной классификации лежат наглядные физические
представления, а ее математическим обоснованием является суще-
ствование таких автомодельных переменных, переход к которым
может существенно понизить размерность пространства исходной
модели. В автомодельной системе структуры представлены спе-
циальными траекториями между стационарными точками или пре-
дельными циклами в фазовом или конфигурационном пространст-
ве. Возможность рыделения подобных траекторий обусловлена
тем, что они являются либо притягивающими, либо разграничиваю-
щими. Это обстоятельство подчеркивается в эквивалентном
термине ’’промежуточные асимптотики” [29].
АВП могут иметь определенное сходство со структурами
в нелинейной консервативной среде, которые обычно называются
солитонами. Однако физика процессов и особенности поведения
структур в тех и других средах существенно различаются. Так,
после столкновения солитоны восстанавливают свою форму и
скорость распространения, тогда как БИ или БФ при встрече
взаимно уничтожаются [174]. Форма и скорость установившегося
БИ не зависят от начальных условий в широком диапазоне измене-
ний, тогда как скорость и форма солитона определяются началь-
ными возмущениями. Указанные особенности поведения АВП
являются отличительными признаками их феноменологии.
1.4. Основные экспериментальные данные
Удовлетворительно провести классификацию АВП по роду ак-
тивных сред — биологических, физических и т.п. — почти безнадеж-
но. Поэтому настоящий параграф мы построим по следующему
принципу. Во-первых, укажем на основные типы сред, отличающих-
*) Отметим, что в литературе ДС означают значительно более широкое
понятие. Например, к ним относят процессы автоколебаний в генераторах
и т.п. [145]. В нашем изложении этот термин используется в более узком
смысле.
13
ся характером или природой локальных положительных обратных
связей, обеспечивающих их автокаталитические свойства. Во-вто-
рых, опишем наиболее яркие примеры АВП в таких средах.
В-третьих, дадим сводную таблицу экспериментально наблюдаемых
АВП уже по принадлежности их к химии, биологии и т.п.
1. Большой класс АВ-сред условно можно описать с помощью
следующей схемы. В открытую распределенную систему извне по-
ступает энергия или вещество, богатое энергией. Эти потоки управ-
ляются локальными свойствами регулирующей поверхности или,
точнее, пограничного слоя малой толщины. В свою очередь локаль-
ные свойства поверхности зависят как от волн температуры, потен-
циала концентрации, распространяющихся вдоль тонкого погранич-
ного слоя, так и от процессов, происходящих в подложке. К такого
рода системам относятся АВ в биологических мембранах (см. § 2.1),
волны окисления аммиака и углерода на платине, распростра-
нение ’’нормальных” зон в однородной сверхпроводящей про-
волоке и т.д.
2. Во втором классе АВ-сред поверхностные эффекты не столь
выражены. Локальная положительная обратная связь обеспечивает
наличие N-образной характеристики среды с падающим участком
’’отрицательного” сопротивления в любом элементарном объеме.
К таким средам и пространственно-временным структурам в них
относятся, например, автоколебательные реакции Белоусова —
Жаботинского, страты в газовом разряде, страты или домены в
электронно-дырочной плазме полупроводников.
3. В природе и технике часто приходится иметь дело со сложны-
ми многофазными средами, в которых неравновесность и АВП
поддерживаются за счет энергии лазерного излучения, термохими-
ческих реакций и других источников. Подобные явления опреде-
ляются и регулируются не только диффузией и теплопередачей, но
и гидродинамическими потоками, в частности конвекцией, испаре-
нием, кипением, поверхностным натяжением. Назовем ряд работ
этого направления. Динамика процессов и образование структур,
возникающих под действием лазерного излучения, рассмотрены
в [38, 43]. Образование структур с участием поверхностных
явлений описано в книге [234], взаимодействие конвектив-
ных потоков с химическими реакциями изучалось в работах
[231,241].
К числу подобных явлений относится кипение жидкости на твер-
дой поверхности теплообмена, которое происходит в двух физи-
чески различных режимах — пузырьковом и пленочном. На тепло-
выделяющих элементах (ТВЭЛ) достаточной протяженности было
замечено, что переход одного режима в другой происходит не одно-
временно по всей поверхности, а путем возникновения нового ре-
14
жима сначала на локальном участке тепловыделяющего элемента и
последующего волнового вытеснения им старого режима. Известно,
что возникновение пленочного режима кипения приводит к резко-
му перегреву ТВЭЛ [84].
Конечно, математические модели всех этих явлений не обяза-
тельно полностью совпадают с (1.1) - (1.2). Однако их анализ на
отдельных стадиях существенно облегчается, если удается исполь-
зовать физические представления и методы теории АВП в гомоген-
ных средах с ’’чистой” диффузией. То же можно сказать и об авто-
волнах, возникающих в живых тканях при морфогенезе. Перейдем
к обзору конкретных экспериментальных данных об АВП.
Распространение фронтов фазовых переходов и образование
структур в твердых телах. Хотя движение фронтов и образование
Рис. 1.1. Распространение БФ фазового перехо-
да полупроводник - металл л пленке VO2
совпадающего с БФ тепловой волны. Интервал
между кадрами 1, 2 и 3 - 2 с [ 103, 64]
структур в твердых телах, где возможны фазовые переходы, изуче-
ны еще недостаточно, можно утверждать, что АВП уже многократ-
но наблюдались во многих средах: сверхпроводниках, полупровод-
никовых и магнитокристаллических пленках и т.п. Ряд сведений об
этих средах содержится в обзоре [23]. Ниже мы остановимся под-
робнее лишь на некоторых относительно новых примерах.
Большой интерес вызывают материалы, в которых происходит
фазовый переход полупроводник - металл. При таком фазовом
переходе происходит одновременно резкое изменение электриче-
ских и оптических свойств, поэтому подобные материалы перспек-
тивны для применения их в оптоэлектронике. Примеры волн фазо-
вых переходов в пленке VO2 показаны на рис. 1.1.
АВП хорошо наблюдаются и в оптически прозрачных монокри-
сталлических магнитных пленках. Такие пленки используются
для конструирования запоминающих устройств ла магнитных до-
менах. АВП проявляется в пленках прежде всего как БФ — а имен-
но движение доменных границ. К наиболее интересным экспери-
ментальным результатам можно отнести следующие. Логгинов и
Непокойчицкий [133] обнаружили в импульсных градиентах маг-
нитных полей движение волн опрокидывания магнитного момента.
15
Скорости таких воли существенно превышают минимальную фазо-
вую скорость спиновых волн и достигают 6 -104 м/с. При превыше-
нии импульсным магнитным полем некоторого критического уров-
ня впереди движущейся доменной границы возникает магнитное
возмущение, скорость которого превышает скорость движения до-
менной границы [99]. Возмущения, сливаясь, образуют микродоме-
ны, которые в свою очередь сливаются с исходными доменами. Тео-
рия АВП в магнитных пленках развита пока еще недостаточно [31,79].
Следующий пример АВП возьмем из исследований по приклад-
ной сверхпроводимости. Это распространение нормальных зон
в однородной сверхпроводящей проволоке [7, 246]. Состояние
охлаждаемого сверхпроводника в первом приближении описывает-
ся одномерным уравнением теплопроводности, в котором функ-
ция источника является разностью между тепловыделением на еди-
ницу длины и теплоотдачей с его поверхности. Зависимость функ-
ции источника от температуры имеет N-образный вид, обеспечиваю-
щий существование двух устойчивых стационарных состояний:
сверхпроводящего и нормального. Теплопередача в проволоке обес-
печивает распространение АВ-перебросов между этими состояниями
Известно лишь малое число опытов, в которых осуществляются
ДС в активной твердотельной среде. Среди них эксперименты,
описанные в статье [109]. Авторы [109] наблюдали многошнуро-
вые и многодоменные состояния в электронно-дырочной плазме
(ЭДП). в полупроводниковом однородном образце n-Ga As толщи-
ной 0,2э • КГ4 и длиной 20 • 10"“ см. Вначале при приложении
электрического поля ЭДП расслаивается перпендикулярно полю.
При дальнейшем увеличении напряженности поля продольные
шнуры расслаиваются, образуя светящиеся ’’капли” (домены или
страты). Вольт-амперная характеристика такого образца имеет
соответствующие ступени, на каждой из которых наблюдается
гистерезис. Как пишут авторы, данное явление можно объяснить
на основе теории контрастных ДС, разработанной Кернером и
Осиповым (см. § 7.4).
Наконец, укажем на обзор [160], где рассмотрены гистерезис-
ные явления и волны переключения в оптически активных полу-
проводниковых средах и в ’’нелинейных” интерферометрах. Под-
черкнем, что в ряде рассмотренных выше примеров большую роль
в образовании АВ играет теплопроводность. Теплопроводность так-
же описывается нелинейным уравнением типа (1.1) и участвует в
формировании АВП (см. гл. 4 и 7).
Здесь укажем на ’’классический” АВП в виде тепловых волн
или структур, который наблюдается вдоль железной проволоки,
нагреваемой током в газовой среде водорода и гелия. Если такая
проволока подключена последовательно с нагрузочным сопротив-
16
ленийм, то она способна стабилизировать ток (эффект барретиро-
вания). Это явление давно используется в радиотехнике, но лишь
сравнительно недавно установлено, что оно связано с возникно-
вением устойчивых ’’температурных” ДС [27, 55].
АВП в химических реакциях. Как мы уже говорили в предисло-
вии, исторически одними из первых наблюдались и исследовались
автоволны при горении. Обзор работ на эту тему содержится в
монографии [91]. Экспериментальные данные о пространственно-
временных структурах достаточно полно представлены в [153].
Рис. 1.2. Ведущие центры в автоколебательной химической реакции Белоусо-
ва - Жаботинского, протекающей в тонком слое водного раствора реагентов
(в чашке Петри), а - Фотографии ВЦ (кадры 1-12): интервалы между кад-
рами - 30 с, период автоколебаний - 56 с, длина волны - 0,55 см (81].
б - Осциллограммы профилей (7 - 5) окрашенной концентрационной АВ
в последовательные моменты времени, зафиксированные в одной точке
реактора: t = 0, 0,8, 5,4, 9,2, 23,6 с (46]
17
Особый интерес представляет класс однотипных реакций,/полу-
чивших название реакций Белоусова — Жаботинского, в) ходе
которых наблюдаются практически все типы АВП. В таких реакциях
колебания сравнительно легко наблюдаемы. С другой стороны,
автоколебания и АВП в биологических объектах во многом анало-
гичны этим модельным реакциям. В тонких трубках и слоях, где
происходят автоколебания концентрационных переменных, были
обнаружены источники АВ — ведущие центры (ВЦ), возникающие
только из-за неоднородного начального возмущения (рис. 1.2).
Для активной гомогенной среды показано существование двумер-
ных волновых процессов-ревербераторов и продемонстрирован
режим образования диссипативных структур. Иногда в результате
Рис. 1.3. Формирование квазистохастичсского АВП в реакции Белоусова -
Жаботинского. Интервалы между кадрами 4 мин
взаимодействия АВ и разрывов их фронтов возникает сложный ре-
жим, который называют ’’химической турбулентностью” (рис. 1.3).
Подробнее с этим кругом явлений можно познакомиться по моно-
графиям [81, 100, 264], а также по основополагающей работе [34].
Остановимся на других важных примерах. В работе [25] приво-
дятся экспериментальные данные о волнах окисления аммиака и
углерода на платине. В такой системе могут действовать три меха-
низма: газодиффузионный, миграционный и тепловой, обеспечи-
вающие распространение АВ каталитической реакции. Совместное
действие этих механизмов приводит к возникновению ряда новых
и интересных явлений, особенно вблизи мест остановки АВ. Это
режимы распространения с модуляцией скорости, пульсации коор-
динаты фронта волны около положения равновесия, а также ДС
(см. гл. 4 и 7).
АВ, получившие название ’’самораспространяющийся высоко-
температурный синтез” (СВС), начали изучаться в 1967 г. [139].
В качестве примера можно назвать реакции титана, циркония,
ниобия, тантала с углеродом, бором, кремнием, азотом. Продук-
тами реакций являются карбиды, бориды и т.п. Максимальные
температуры в волне достигают 3000 ° С, а скорости волны лежат
в пределах от 0,2 до 12 см/с. Такие волны осуществлены примерно
1В
в 150 ^различных системах. Метод С ВС начинает активно использо-
ваться в промышленности для получения тугоплавких соединений.
Большей интерес вызывают исследования автоколебательного и
спинового режимов АВП в СВС-системах. Природа обоих режимов
одинакова: они возникают в результате тепловой неустойчивости
процесса к малым возмущениям — продольным в случае автоколе-
баний и поперечным в случае спинового горения. Фотография
спинового горения приведена на рис. 1.4.
Недавно было обнаружено новое в радиационной криохимии
явление, проявляющееся в послойном распространении АВ хими-
ческого превращения по предварительно облученной гамма-излуче-
нием замороженной смеси реагентов. Инициировались реакции
галоидирования и гидрогалоидирования углеводородов. Феноме-
нологическую основу явления составляет действие положительной
обратной связи между химическим превращением и хрупким
разрушением твердого образца реагентов. Образующиеся трещины
увеличивают активную поверхность и вызывают включение нового
реакционного процесса, а химическая реакция в свою очередь
стимулирует последующее разрушение. В результате возникает
бегущая по твердому образцу автоволна хрупкого разрушения и
химического превращения/ [26]. Предполагается, что одной из
причин хрупкого разрушения является различие в плотностях
исходных реагентов и продуктов реакции, другой — термические
напряжения, вызванные экзотермичностью химических процессов.
Рис. 1.4. Фотография продольного шлифа образца, полученного после спино-
вого горения в системе титан - феррабор. Винтовые (наклонные) линии -
следы спинового горения [139]
АВП в живых системах. Автоволновые процессы в таких систе-
мах можно разделить на четыре группы: АВ в возбудимых клетках
и тканях, в биохимических реакциях, в сообществах живых орга-
низмов и АВП при морфогенезе.
1. В первой группе активным распределенным элементом (или
возбудимой средой) является мембрана нервного волокна нейрона
19
или других клеток. АВП в возбудимых средах наиболее хорошо
изучены, и им посвящено много обзоров и монографий. В/гл. 2
будет показано, почему в живых электрических кабелях распрост-
ранение возмущений описывается уравнениями параболического
типа (1.3), а не гиперболическими уравнениями ’’телеграфистов”.
Математические модели АВП в нервной ткани (мозге) не всегда
сводятся к системам типа (1.1) — (1.3), а представляют собой
интегродифференциальные уравнения [137].
В сетях, состоящих из тормозных и возбуждающих нейронов,
могут распространяться волны коллективной импульсной актив-
ности. Например, в одной из структур мозга — гипокампе регист-
рировалась волна (так называемый суммарный пиковый потен-
циал — СПП), слагающаяся из разрядов пирамидальных клеток.
Скорость распространения СПП лежит в пределах 20 — 60 см/с,
первой следования областей повышенной импульсации порядка
102 мс [192]. На полоске изолированной коры мозга также наблю-
далось распространение волны активности со скоростью 20 см/с
и длительностью ’’залпа” активности до 300 мс [36].
При локальном раздражении коры мозга химическим, механи-
ческим или электрическим путем возникает депрессия (фиксируе-
мая на электрокортикограмме), которая распространяется в виде
бегущего фронта от места раздражения с небольшими по сравнению
со СПП скоростями (30 — 90 мкм/с). Распространяющаяся депрес-
сия всегда сопровождается изменением уровня постоянного потен-
циала коры [115, 212, 253]. На БФ распространяющейся депрессии
наблюдается повышенная импульсация нейронов. Механизм распро-
странения такой волны связан с изменением межклеточной концен-
трации ионов К+ и Са2+.
Замечательным обстоятельством является тот факт, что волны
типа распространяющейся депрессии наблюдаются также и на
сетчатке глаза. Такая волна в виде ревербератора сопровождается
изменением оптических свойств сетчатки и поэтому может быть
зарегистрирована на фотопленке (рис. 1.5).
Проводящая система сердца, определяющая управление сокра-
щениями сердечных мышц, состоит из большого числа клеток
различного типа. Активность каждой клетки обеспечивается меха-
низмами, аналогичными тем, которые действуют в аксонах нерв-
ных клеток. Связь между клетками в межклеточной среде осуще-
ствляется ионными токами с помощью специальных веществ —
медиаторов. По волокнам сердечной мышцы ”в норме” могут
распространяться волны электрических потенциалов в виде БИ.
Возникновение автономных источников волн — ревербераторов
приводит к аритмии и фибрилляциям (режиму несинхронизован-
ной активности мышц), что является патологией для организма.
20
Рис. 1.5. Фотографии двух оборотов ревербератора распространяющейся
депрессии (РД) в сетчатке глаза курицы. РД проявляет себя темной областью
с резкими контрастами на фронте и спаде БИ. Интервалы между кадрами -
20с [212]
21
Подробнее с проблемами распространения АВ в сердце Можно
познакомиться по монографиям [1,100].
2. Не исключены АВ и с участием биохимических превращений.
Наиболее ярко процессы типа БФ переключения и образования ДС
проявляются при дифференцировке живых тканей. При этом в
формировании АВП участвуют и управляющие генетические систе-
мы, и активный транспорт веществ через мембраны клеток. В
формообразовании (морфогенезе) такие процессы сопровождают-
ся механическими АВ разного вида. Указанной проблематике
посвящена обширная литература [163,138,33,50,170,205].
3. Различные АВ-явления наблюдаются в распределенных сооб-
ществах живых особей. При этом бывают разные типы проявления
активности систем: размножение (эквивалентное автокатализу),
взаимодействия типа хищник — жертва и другие. Помимо обычной
диффузии, в подобных системах возможна взаимная диффузия.
В соответствующих моделях (1.1) могут присутствовать члены
с коэффициентами=# 0 (i =#/). Кроме того, такие системы могут
быть неоднородными.
Характер АВП в сообществах осложняется хемотаксисом,
фототаксисом, а также возбуждением конвективных потоков в
водных взвесях микроорганизмов [240]. Сообщества или экоси-
стемы подвержены внешним воздействиям различных геофизиче-
ских факторов.
Приведем два примера. На определенном этапе существования
амебоподобных клеток Dictyostelium discoideum наблюдается
агрегация, связанная с волновым движением этих клеток. Процесс
агрегации протекает следующим образом. Одна из клеток начинает
периодически выделять специальное вещество - аттрактант
(ц-АМФ). Соседние клетки в ответ также выделяют импульс
ц-АМФ приблизительно через 15 с после получения сигнала от
первой клетки. Затем клетки начинают двигаться к источнику
сигналов. Во время движения каждая клетка, по-видимому, не
восприимчива к дальнейшей стимуляции. Такой механизм сигнали-
зации и ответа на сигнал гарантирует распространение волны сигна-
ла и сходящегося движения клеток к центральному источнику
[227].
Недавно аналогичное волновое движение было обнаружено в
процессе развития эмбриона курицы. Этот процесс также регули-
ровался межклеточной ц-АМФ. Добавление этого вещества из внеш-
него источника нарушало нормальное распространение волн клеточ-
ного движения и иногда сопровождалось возникновением ревербе-
ратора [259].
Напомним, что исторически теория АВП начиналась именно с
описания волн распространения генов в распределенных популя-
22
Таблица 1.1
Экспериментально наблюдаемые АВП
Объекты Характерная скорость Тип АВП
Физические Полимерная пленка 10-2 - 10 см/ мин БФ
Кипящая пленка 0-1 см/с ДС, БФ
Пленка на подложке 1 см/с БФ, БИ
Магнитокристаллическая пленка 104 м/с БФ
Электронно-дырочная плазма 0 ДС
Технические Сети связанных автогенераторов СА
Активная RC- линия БФ
Распределенные электролюм инесценгные преобразователи изображения ДС.БИ
Оптически активные среды в интер- ферометрах БФ
Лабораторная плазма газового разряда ДС, БИ
Сверхпроводящая проволока БФ
Химические Горящие среды БФ
Барретор (проволока с током в среде Н2 и Не) 0 - 2 см/с ДС, БФ
Реакции Белоусова - Жаботинского IO’2 - 10 см/с ДС. СА, БИ.
Железная проволока в азотной кислоте 2 м/с АИВ БИ
Реакция окисления аммиака на платине 0.5 см/с БФ
Реакция окисления углерода на платине 5 м/с БФ
Высокотемпературный синтез (реакции титана с углеродом и им подобные) 1-15 см/с БФ
Реакция галоидирования и гидрогалоиди- рования твердых углеводородов при низких температурах 0,1 - 2 см/с БФ
Реакция полимеризации эпоксидиально- го олигомера аминами IO’2 см/с БФ
Биологические
Аксон кальмара 21 м/с БИ
Проводящая система сердца 25 - 300 см/с БИ. АИВ
Мышца миокарда 30 ем/с БИ
Гладкие мышцы 5 - 10 см/с БИ, АИВ
Нейронные сети: а) быстрые волны 10 - 50ем/с БИ
б) медленные волны 2-5 мм/мин БИ, АИВ
23
Таблица 1.1 (окончание)
Объекты Характерная скорость Тип АВП
Биологические Сетчатка глаза 2-5 мм/мин БИ, АИВ
Активные филаменты в харовых водорослях 50 мкм/с БИ
Коралловые полипы 50 см/с БИ
Плазмодий миксомицета 10 - 50 мкм/с СА, БИ,
Популяции амебоидных клеток 1-5 мкм/с АИВ БИ, АИВ
Популяции прыткой ящерицы 0 дс
АВП при морфогенезе — см. подробнее в [205,261]
Примечание, а) Обозначение АИВ - автономные источники волн
(см. гл. 5); б) для технических АВ-сред, а также для горящих сред порядок
характерных скоростей зависит от конкретных параметров конструкций и
поэтому не приводится; в) одной из первых работ, посвященных изучению
страт в газовом разряде, была статья Зайцева н Джерпетова [ 90].
днях [114]. АВ в генетике и экологии так же, как распространение
эпидемий, вредителей и т.п., снова начали интенсивно изучаться
[169].
4. Наконец, АВ-механизмы во многом определяют движение
в эмбриональных структурах, один из примеров которого мы
только что рассматривали. Они также определяют и перистальти-
ческие движения в стенках живых каналов. Эта проблема подробно
будет обсуждаться в гл. 9 на примерах кишечника, кровеносных
сосудов и тяжей плазмодия миксомицета Physarum. Поэтому здесь
мы приведем лишь некоторые примеры АВ-активности одиночных
живых клеток.
АВ-движения наблюдались при распластывании фибробласта.
В работе [176] показано, что по краю ламеллы фибробласта (рас-
пластанной ч^сти клетки толщиной менее 1 мкм) циркулируют
две волны-складки. Более часто наблюдались квазистохастические
колебания толщины в областях размером 5 — 10 мкм с периодом
от одной до нескольких минут. Такие процессы определяют меха-
низмы, с помощью которых клетка перемещается по плоской
поверхности. АВП наблюдаются на разных стадиях эмбрионогенеза
и морфогенеза. Сведения о них были собраны Белоусовым [205,
261].
В заключение главы приведем сводную таблицу (табл. 1.1) АВП,
упомянутых выше, а также тех, которые представлены в таблицах,
опубликованных в следующих работах: [51, 153,163].
24
Особо отметим, что табл. 1.1 может быть существенно расшире-
на за счет разнообразных явлений образования турбулентных
структур, волн в плазме и т.п., если в качестве обобщенной модели
АВП рассматривать уравнение (1.1) с учетом ’’скорости сноса”.
Новый класс АВ-систем, состоящих из двух взаимодействующих
подсистем — диффузионной и деформационной, рассмотрен в ра-
боте [Д5б]. Одним из возможных процессов в таких системах яв-
ляется электронно-деформационно-тепловая неустойчивость (ЭДТИ),
протекающая на поверхности полупроводников под действием
лазерного излучения. ЭДТИ приводит к образованию на поверх-
ности сложных упорядоченных структур связанных полей дефор-
маций, концентрации неравновесных носителей и температуры.
Эти структуры записываются на поверхности после окончания
действия лазерных импульсов в виде чередования различных фаз
(аморфной и кристаллической, металлической и диэлектричес-
кой [Д4а]).
Интересные и разнообразные АВ-явления в виде двумерных
волн ориентации молекул в жидкокристаллической структуре,
приводящие к локальным изменениям показателя преломления,
наблюдались в системах с оптической обратной связью. Важной
особенностью таких систем является нелокальный характер связей
точек двумерной среды между собой [ДЗа]. Эти автоволны сходны
с явлениями, наблюдаемыми в телевизионных устройствах с опти-
ческой обратной связью [Д5а].
ГЛАВА 2
ФИЗИЧЕСКИЕ ПРЕДПОСЫЛКИ ПОСТРОЕНИЯ
БАЗОВЫХ МОДЕЛЕЙ
Большое разнообразие объектов, в которых наблюдаются АВП,
не позволяет даже кратко остановиться на построении и анализе
математических моделей каждого из них. Их общие черты в отно-
шении АВ-явлений отражаются в структуре упрощенных, базовых
моделей, анализируемых в последующих разделах книги. Как
известно, модель должна быть ’’карикатурой” на систему, чтобы
ее можно было исследовать достаточно полно и легко интерпрети-
ровать полученные результаты для широкого класса объектов.
Этому требованию удовлетворяют рассматриваемые базовые
модели. С другой стороны, необходимо знать ограничения на
применимость данных результатов для конкретных объектов.
Этим вопросам и посвящена настоящая глава.
2.1. Конечная скорость взаимодействия.
Редукция телеграфных уравнений
Динамика компонентов основной базовой модели описывается
квазилинейными параболическими уравнениями, которые имеют
первый порядок по времени и второй по пространству (см. (1.1) —
(1.3)). Такие уравнения допускают неограниченную скорость
передачи взаимодействий между элементами среды. Действительно,
в случае отсутствия распределенных источников (F, = 0) и локали-
зованных начальных условий (х{(0, г) = 6(г)) решение имеет вид
г2 \
4D„-7 )
(2.1)
Как видно, в любой момент времени (t > 0) во всех точках прост-
ранства концентрация х, отлична от нуля, т.е. массоперенос проис-
ходит с неограниченной скоростью. Конечно, количество переноси-
мого вещества быстро убывает с расстоянием, что, собственно, и
делает оправданным диффузионное приближение в теории переноса.
Однако при наличии распределенных источников с низким порогом
возбуждения использование такого типа уравнений в моделях
26
приводит к физически неверным результатам, например завышен-
ным (и даже физически недопустимым) значениям скоростей
распространения фронтов. Тем не менее во многих случаях диффу-
зионное приближение является вполне допустимым при моделиро-
вании АВП. Обсудим вопрос о сводимости к нему на простых
модельных примерах.
1. Рассмотрим массоперенос, который осуществляется переме-
щением частиц. Эволюция функции распределения и» по скоростям
Ко и координатам г описывается уравнением
Эн»
— + Ко grad w =
bt
= f K(t, r, V'o, V0)w(t, r, V'Q)dV'Q, (2.2)
Vo
правую часть которого называют интегралом столкновений. В пред-
положении локального равновесия по скоростям, распределенным
по закону Больцмана - Максвелла, получается обычное диффузи-
онное уравнение вида (1.1) - (1.3) для описания эволюции распре-
деления плотности числа частиц [215,223].
Рассмотрим теперь случай ограниченных скоростей частиц. Пусть
скорость частиц, для простоты, принимает два значения: Ко = ±а,
и система однородна. Тогда (2.2) сводится к линейным уравнени-
ям для плотности частиц, движущихся со скоростями +а и -а:
Эи+ Эи+ а
— + а — = — (и_ - и+),
9 г br 2 (2.3)
Ьп_ Ьп_ а
— - а------ — (п+ — п_),
bt br 2
где коэффициент пропорциональности а соответствует числу столк-
новений в единицу времени. Перейдем от частных плотностей п+ и
и_ к полной плотности п = п+ + п_ и потоку I = п+ - п_ :
bn bl
— + а---- О
bt br
bl bn
— +a — = — al. (2.46)
bt br
Уравнение непрерывности (2.4a) и закон диффузии (2.46) описы-
вают массоперенос в рассматриваемой модели. Закон диффузии
отражает конечность времени релаксации потоков. Учет этого поло-
жения в рамках линейной термодинамики необратимых процессов
был осуществлен Лыковым [134].
(2.4а)
27
(2.5)
(2.6)
Подставив (2.4б) в (2.4а), получим
Э2и а ди 1 д2и
а—— ------------------ = 0,
Ъг2 a dt а дт2
или, вводя коэффициент диффузии D = а2 /а = К02/а
ди д2и д2и
— + т —— = d ——
дг дг2 Ъг2
где т = О/ Ко — время релаксации массообмена.
Очевидно, что при Ко уравнение (2.6) редуцируется в обыч-
ное уравнение диффузии. Прежде чем обсудить его решение, рас-
смотрим еще один наглядный пример системы (активного ка-
беля), моделируемой уравнением (2.6)*). Статистическое обосно-
вание уравнений типа (26) было проведено в работе [238].
2. Распространение электрического возбуждения по нервному
волокну и другим подобным системам (рис. 2.1), строго
говоря, описывается уравнениями Максвелла (см., например,
[173]). Причем удельное сопротивление протоплазмы велико
(р ~ 0,3 Ом • м), а радиус волокна мал (менее 1 мм), что обуслов-
ливает высокий декремент затухания для пассивного распростране-
ния бегущих импульсов. Активные свойства принадлежат мемб-
ране. Очевидно, для того чтобы они проявились, в системе должны
существовать поперечные магнитные волны (компоненты электро-
магнитного поля Er =# 0, Hr = Нг = Ед = 0 в цилиндрических коор-
динатах R, г, в), показанные на рис. 2.1. Поперечные электричес-
кие моды не взаимодействуют с активными элементами мембра-
ны и, следовательно, могут не рассматриваться. Учитывая приве-
денные соображения, представим эквивалентную схему волокна
в виде, показанном на рис. 2.2 (считается, что внутреннее и наруж-
ное продольные активные сопротивления волокна можно предста-
вить одной величиной Лпр) • Уравнения такой линии имеют следую-
щий вид:
di Ъи
-tc—ww.
(2.7)
+ ^пр! ~
— емкость, сопротивление и индуктивность волокна,
Ъи di
—+ L —
Эг Ы
где С, Rnp,L
*) Отметим
также, что среди экологических систем, пористых тел и т.п.
имеются многочисленные примеры массопереноса, в которых априори нель-
зя полагать время т малым и пользоваться параболическим уравнением диф-
фузии.
28
,1
2
Рис. 2.1. Электрическое поле Е и токи i в нервном волокне: 1 - мембрана;
2 - внутриклеточная протоплазма
Рис. 2.2. Эквивалентная электрическая схема нервного волокна
отнесенные к единице длины, iM (и) — зависимость тока через
мембрану от напряжения на ней.
Объединяя уравнения (2.7), получим
/ д2 д2 \ / Э \
\ьГ2 ~LC k4u + \l'м =
Э
= /?прС—— и. (2.8)
(2.6),
Как видно, это телеграфное уравнение аналогично (2.5),
причем К02 = (ZC)-'/2, г = Z//?np,Z? = Zr02//?np = y/t/C(l/Rnp).
Рассмотрим пассивные свойства этих уравнений. Полное реше-
ние задачи Коши для (2.8) на бесконечной прямой можно полу-
чить методом характеристических функций Римана. В случае
и (0, t) = п (0, t) =1 и и = п(г > 0, 0) =0 оно имеет вид
г
n(r,t)=— у/—
2 Dt
( 1 \
ехр(-------I X
\ 2т /
J, (yft’2-r2T/D/2r) , / г , 1 \
Х-----AV'....J = --- dt + ехр( —7 V— ) (2.9)
y/t' -г2т/D \ 2 Dt I
при t > гу/tID = r/V0 и n(r, t) = 0 при t < гу/tID = r/K0, где
Ji (x) - модифицированная функция Бесселя первого рода.
На рис. 2.3 показан вид решения (2.9) - изохрона полупрост-
ранства. Как и следовало ожидать, скорость проникновения возму-
29
t «const
Рис. 2.3. Изохрона в полупространст-
ве - решение (2.9) линейного гипербо-
лического уравнения (2.6) или (2.8)
ехр(-^)
г - tyJD/f
щений (массы) не может превышать значений Ко. Для телеграф-
ных уравнений пространственный декремент затухания равен 6 =
= 2 л/Е/С/Япр. В нервном волокне емкость мембраны ~ 10-8 пФ/м2,
индуктивность ~ 10"11 Гс/м, удельное сопротивление протоплаз-
мы р = 0,3 Ом • м и радиус меньше 0,1 мм, откуда получаем оценку
пространственного декремента затухания: 5 < 0,1 см. Очевидно,
что как пассивный проводник нервное волокно не может служить
для передачи информации.
Для t > т справедливо асимптотическое разложение моди-
фицированной функции Бесселя: Л (х) ~(ехрх) /\/2ях. Подставив
Ji (х) в (2.9), получим для t > г ^t/D
n(r,t)=l-~ f exp (~q2)dq,
я о
(2.Ю)
где q = г2 / (4Dt). Это выражение совпадает с решением соответст-
вующего классического уравнения диффузии с мгновенной релак-
сацией потока.
Отсюда можно сделать вывод, что базовые модели вида
(1.1)-(1.3) являются достаточными, если характерное время t
локальной кинетики F( (xL, ..., х„) много больше гс х/т/О = г с/ Ио,
где гс — характерный размер системы.
Рассмотрим с этих позиций нервное волокно. Скорость распрост-
ранения импульсов в нем ~ 2 • 103 см/с, а длительность фронта
~ 10-3 с, что определяет характерную протяженность фронта ~ 2 см.
В то же время пространственный декремент затухания ~ 0,1 см.
Поэтому можно пренебречь волновыми свойствами уравнения (2.8)
и редуцировать телеграфное уравнение к виду (1.1)-(1.3). Под-
черкнем, что малый пространственный декремент обусловлен
большим сопротивлением протоплазмы; если бы протоплазма
имела проводимость металла, то значение декремента превысило
бы размер ’’организмов”, и в моделях следовало бы использовать
уравнения вида (2.9).
3. Активные линии с относительно большими удельными сопро-
тивлениями, в частности нервные волокна, можно исследовать в
30
рамках редуцированной из (2.6)-(2.8) (или ее аналога) базовой
модели (1.1) —(1.3). Распространение волн возбуждения обуслов-
лено активными, но не волновыми свойствами подобных сред [ДЮ].
Проиллюстрируем это положение, а также соотношения между па-
раметрами среды, при которых редукция допустима, на примере
следующей модели (г G (-°°, +°°)):
Э2х дх д2х
т —+ —-D — =-27х(1-х)(х0-х), (2.11)
dt2 дГ дгг
где 0 < х0 < 1 и все параметры модели положительны. Левая часть
соответствует уравнениям (2.6) и (2.8), а правая часть описывает
распределенные источники, обусловливающие активность модели-
руемой среды. Существуют три стационарных решения:х (г,t) =х0
(неустойчивое), х(г, г)= 0 и х (г, 0=1 (устойчивые). Найдем ско-
рость распространения возбуждения (БФ) в среде — волн ’’перебро-
сов” из состояния ”0” в состояние ”1”.
Автомодельная замена переменной т? = г — Vt переводит (2.11)
в обыкновенное дифференциальное уравнение
/ d2 d d2 \
тК2 — - V — -D — I х = —27х (1 —х) (х0 — х), (2.12)
\ dr? dr? dri /
решение которого должно удовлетворять условиям: а) при т? ->
x(rj) -* 0; б) при т? ->+«° х (i?) = 1. Неопределенный пока параметр V
(скорость распространения БФ) является собственным значением
задачи (2.11) с граничными условиями а) и б).
Обозначим W = dx/drj, W (dW/dx) = d2x/drj2; в результате прихо-
дим к задаче на собственные значения:
(г Г2 ~D)W (dW/dx) - VW = -27х (1 - х) (х0 - х),
W(0)= W(l)=0. (2.13)
Подставив W = а(1 — х)х в (2.13), получим систему уравнений
для определения а и V из условия равенства нулю коэффициентов
при х, х2 их3. Эта система всегда имеет решение. Введем следую-
щие обозначения:
Vi = D/r, К2иф=7£»(2х0-I)2; (2.14)
здесь Vo — скорость распространения волн, связанных с инерцион-
но-упругими свойствами среды в модели (2.8), или максимальная
скорость движения частиц в модели (2.6), Кдиф - скорость волн
возбуждения, описываемых базовой моделью (1.1) —(1.3), т.е.
при т = 0 в (2,11), и связанных только с активными свойствами
среды с диффузией. Используя эти параметры, собственное значе-
ние задачи (2.12), скорость распространения автоволны, запишем
31
в виде
У2 =К2диф/[1 +(Кднф/Ко)2] = ^/[1 +(К0/КДНф)2]. (2.15)
Как и следовало ожидать, скорость распространения возбуждения
оказывается меньше ^дйф и Ио, а необходимым условием
применимости базовой модели является (Иднф/К0)2 < 1. Анало-
гичные соотношения, но более длинным путем, могут быть получе-
ны для любой нелинейности F(0) = F(х0) = F(l) =0, F* (0) < 0,
Fx(l) < 0, т.е. приводимое условие редукции остается в силе
для широкого класса систем. Поскольку величина Кдиф определя-
ется и характеристиками нелинейности среды (у, х0), то оценка
применимости редуцированной, базовой модели (1.1)-(1.3)
должна уточняться на этапе анализа ее АВ-решений. Причем этот
вопрос не столь прост, как может показаться на первый взгляд.
Если, например, для электрического импульса возбуждения в нерв-
ном волокне ИДиф ~ Ю м/с, а Ио ~ 108 м/с, то для тепловых волн
или систем с реакциями и диффузией в пористых телах вполне
реальны ситуации, когда простейшие базовые модели непримени-
мы, и следует использовать либо гиперболические системы урав-
нений, либо зависимость коэффициента диффузии от переменных.
Полезно сравнить автомодельное решение уравнения (2.11)
при больших значениях Rnp (см. гл. 4) с распространением волн
в активных линиях с Лпр -► 0, например линиях с туннельными
диодами [102]. В первом случае V~ КДНф, т.е. определяется / (и)
и практически не зависит от LС. Во втором случае V~ (LC)~ll2 и
не зависит от i (и), но нелинейность i (и) определяет стационар-
ную форму бегущего импульса, не зависящую от начальных усло-
вий. Можно считать, что редуцированная модель (1.1)-(1.3) опи-
сывает предельный случай — нелинейное распространение возбуж-
дения в среде.
2.2. Нелинейное уравнение диффузии.
Конечная скорость диффузии
Уравнение диффузии (1.3) также может описывать массотепло-
перенос с конечной скоростью даже в случае отсутствия источни-
ков (Fj (х) = 0), если коэффициент диффузии зависит от перемен-
ной х так, что обращается в нуль при ее некоторых значениях [28,
92]. Проиллюстрируем это утверждение одним примером, а затем
коротко обсудим среды с подобными зависимостями D от х.
Найдем простейшие частные решения уравнения
Эх Э / Эх\
— = — I D(x)—),
bt br \ br )
где D = 2>х°; a> 0. Уравнение (2.16) будем рассматривать на полу-
32
(2.16)
прямой г > 0, а на границе зададим следующее условие:
x(0,t) = xotp; (2.17)
начальным условием задачи является
х(г, 0) = 0, г>0. (2.18)
Сделаем обычную автомодельную замену переменных г? = Vt — г и
будем искать решение в виде
х (17-г) = 0(1?), (2.19)
где 0 — неизвестная функция. Подставив уравнение (2.19) в (2.16),
получим обыкновенное дифференциальное уравнение для нахожде-
ния функции 0 (г?):
d d / ~ „ d \
К—0 = — Z)0a—0 (2.20)
di? dr? \ dr) /
Проинтегрировав (2.20) один раз по г? и положив постоянную ин-
тегрирования равной нулю, получим
d D d п
D 0°—0=1'0, или----------0 =1. (2.21)
dr? Vo di}
После второго интегрирования получим
D
— *°=Т1 + СО. (2.22)
Vo
Постоянная Со = 0 определяется из условия: 0 = 0 при t = г = г? = 0,
что позволяет найти вид 0 (г?) из (2.22):
/ Vo \1/о / V2o\1l° ,, / г \1/<г
0 (г?) = I — V ) , или х (г, t) = I —— I t1'° I 1 -- I
\ D / \ D / \ Vt!
(2.23)
Сравнивая выражение для решения x(r, t) (2.23) с граничным
условием (2.17), находим следующие соотношения между пара-
метрами:
р=1/о и V2o/D = xS. (2.24)
Подставляя (2.24) в (2.23), получим окончательный вид искомо-
го решения:
X(r,t) = yl/a ПрИ 0<Г< Vt, (2.25) х (г, t) = 0 при г > Vt.
Решения типа (2.25) получили название температурных волн.
33
Скорость распространения таких волн определяется параметрами
системы D и а, а также граничными условиями для х$:
V=\/dxSIo. (2.26)
В целях простоты здесь рассмотрен лишь иллюстративный при-
мер. В работах, цитированных выше, существование температур-
ных волн вида (2.25) показано для довольно общих классов гра-
ничных и начальных условий. Из второй формулы (2.24) видно,
что в случае линейной диффузии (о = 0) формально получаем
К= °0 — бесконечную скорость распространения массы или тепло-
ты согласно обсуждавшемуся выше соотношению (2.1). Таким
образом, нелинейность коэффициента диффузии приводит к новым
физическим эффектам. Мы еще вернемся к этому вопросу в гл. 7,
где будет показано, что даже автономная задача (нейтральные
граничные условия) для уравнения нелинейной диффузии cF(x),
соответствующей автокатализу, имеет автомодельные решения
типа локализованных структур.
Обратим внимание на следующее принципиальное различие
между определениями скоростей волн в моделях (2.16) и (2.11).
В задачах типа (2.11) (см. также гл. 4) скорость волны перебросов
из одного стационарного состояния в другое является собственным
значением нелинейной краевой задачи в конфигурационном прост-
ранстве. В задачах типа (2.16) скорость определяется из соотноше-
ния (2.24), согласующего автомодельное решение с граничным
условием (2.17). Вследствие этого решения нелинейных диффе-
ренциальных уравнений принято разделять на два класса: промежу-
точные асимптотики (автомодельности) первого (2.16) и второ-
го (2.11) родов [29]. Наша книга посвящена автомодельностям
второго рода. Основные .качественные АВ-эффекты можно рассмот-
реть в линейном приближении переноса. Поэтому внимание сосредо-
точено на моделях с постоянными коэффициентами диффузии.
В случае слабой зависимости Dot х на масштабе исследуемого АВП
такое допущение представляется вполне удовлетворительным для
многих реальных систем. Тем не менее уместно остановиться на
некоторых физических причинах появления такой зависимости.
Теплопроводность обеспечивает перенос энергии. В жидких и
газообразных средах перенос энергии осуществляется посредством
движения частиц в диффузионных процессах при отсутствии кон-
векции.
Одним из широко распространенных представлений зависи-
мости коэффициента диффузии D от температуры Т является
D = Dexp(—A/Т) (D и А — постоянные). Поскольку в таких сре-
дах коэффициенты диффузии D и теплопроводности Dq пропор-
циональны друг другу, то Dq(T) ~ ехр(—А1Т) \ заметим, что зави-
34
симости этого типа или типа Эйнштейна —Фоккера/) ~ ЬкТ (Ь —
подвижность, к — постоянная Больцмана) не могут быть всеобъем-
лющими, так как они не учитывают существование критических
точек системы.
Действительно, поток в линейной термодинамике необратимых
процессов находится из соотношения /, = -a (gradд,) 7-^, где
а = const, Hi — химический потенциал i-ro компонента, Т — темпе-
ратура, р — давление. Учитывая основные уравнения (1.1), (1.2),
нетрудно получить следующее выражение для коэффициента диф-
фузии: D, ~ (ЭД;/Эх/) Т р, из которого следует, что D = const
только для идеальных газов (или растворов). В критических точ-
ках выполняется равенство (дрч/дх{) = 0. Поэтому вблизи крити-
ческих состояний простые представления для зависимости D от х,
по-видимому, не имеют места.
В исследованиях плазмы или электронного газа в твердых те-
лах обычно используют степенные зависимости коэффициента
теплопроводности D от Т. D ~Т° (см. § 7.7). В случае, когда рабо-
чий диапазон температур при АВ-явлениях не столь велик
(I /’max — ^min l/^inin < 1), качественные выводы теории АВП
для линейного приближения переноса должны сохраняться.
Массоперенос в принципе должен описываться нелинейным
уравнением. Особенно велики отклонения от линейности в раство-
рах сильных электролитов, плазме и т.д. Тем не менее вдали от
критических точек использование уравнений переноса с постоянны-
ми коэффициентами не должно приводить к существенным пог-
решностям. Следует помнить, что имеются системы, для которых
учет зависимости D от х является обязательным, например порис-
тые тела [28]. Рассмотрение взаимной диффузии компонентов
также должно учитывать зависимость Иц от х,-, ибо в противном
случае могут быть получены некорректные результаты.
2.3. Диффузия в многокомпонентных гомогенных системах
В теории АВП мало внимания уделяется перекрестным эффек-
там в переносе компонентов систем. Как правило, при анализе
базовых моделей предполагается, что матрица ’’диффузии” в
обобщенном законе Фика в форме (1.2) является диагональной.
Часто такое допущение (редукцию) следует считать вполне оправ-
данным, однако существуют системы, для которых оно принципи-
ально недопустимо. Во-первых, имеются системы, в которых коэф-
фициенты Dif (i =#/) близки к /),-,•; например, в водном растворе
сильных электролитов NaSO4 и H2SO4 Df/ ~ 0,5 Da [186, 222];
диффузия ионов в плазме дает такой же эффект. Во-вторых, если в
пассивных системах малость отношения DtjlDa достаточна для
35
того, чтобы пренебречь перекрестными потоками, то в активных
системах ’’локальный” автокатализ приводит к тому, что даже при
малом значении Dy/Da, но не нулевом, возможно появление
качественно новых для системы АВ-свойств. Иными словами, ма-
лость Dy здесь может быть оценена лишь с учетом точечной кине-
тики (см. §3.3 и 75). Остановимся на ряде вопросов теории
перекрестных эффектов на примере массопереноса в многоком-
понентных системах. Перекрестные эффекты также имеют место
при сопряжении переносов массы и теплоты, массы и электричес-
ких зарядов и т.д.
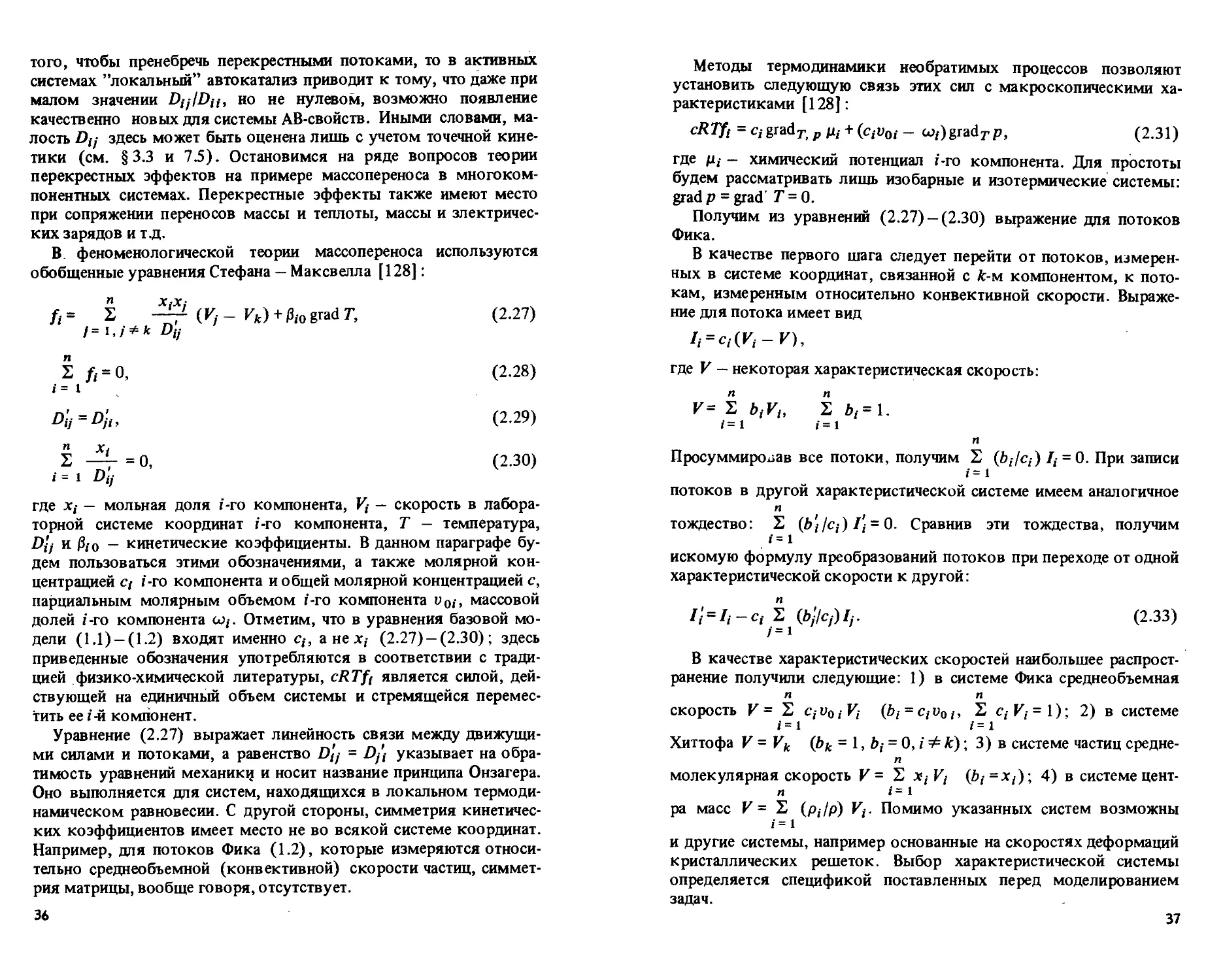
В феноменологической теории массопереноса используются
обобщенные уравнения Стефана — Максвелла [128]:
" xtxi
fi = S 4/ (V/ - Vk) + Pi0 grad T, (2.27)
/ = Dif
S fi = 0, (2.28)
i= 1
(2.29)
" xt
S —- = 0, (2.30)
i= i D'u
где Xj — мольная доля i-го компонента, V, — скорость в лабора-
торной системе координат i-го компонента, Т — температура,
Dy и Р|0 — кинетические коэффициенты. В данном параграфе бу-
дем пользоваться этими обозначениями, а также молярной кон-
центрацией с/ i-го компонента и общей молярной концентрацией с,
парциальным молярным объемом i-го компонента vOl-, массовой
долей i-го компонента со,. Отметим, что в уравнения базовой мо-
дели (1.1)-(1.2) входят именно q, анех,- (2.27) - (2.30); здесь
приведенные обозначения употребляются в соответствии с тради-
цией физико-химической литературы, cRTft является силой, дей-
ствующей на единичный объем системы и стремящейся перемес-
тить ее i-й компонент.
Уравнение (2.27) выражает линейность связи между движущи-
ми силами и потоками, а равенство Dy = Dy указывает на обра-
тимость уравнений механику и носит название принципа Онзагера.
Оно выполняется для систем, находящихся в локальном термоди-
намическом равновесии. С другой стороны, симметрия кинетичес-
ких коэффициентов имеет место не во всякой системе координат.
Например, для потоков Фика (1.2), которые измеряются относи-
тельно среднеобьемной (конвективной) скорости частиц, симмет-
рия матрицы, вообще говоря, отсутствует.
36
Методы термодинамики необратимых процессов позволяют
установить следующую связь этих сил с макроскопическими ха-
рактеристиками [128]:
cRTf{ = с, gradT р щ + (с,и0|- - wf)gradT p, (2.31)
где Pi — химический потенциал i-го компонента. Для простоты
будем рассматривать лишь изобарные и изотермические системы:
grad р = grad' Т = 0.
Получим из уравнений (2.27) —(2.30) выражение для потоков
Фика.
В качестве первого шага следует перейти от потоков, измерен-
ных в системе координат, связанной с к-м компонентом, к пото-
кам, измеренным относительно конвективной скорости. Выраже-
ние для потока имеет вид
/, = с,(К,-К),
где V — некоторая характеристическая скорость:
и п
V= S b/Vi, S bt=l.
i=i i=i
и
Просуммировав все потоки, получим S (btlci) 1{ = 0. При записи
1= 1
потоков в другой характеристической системе имеем аналогичное
и
тождество: S (b'j/cj) l\i = 0. Сравнив эти тождества, получим
|= 1
искомую формулу преобразований потоков при переходе от одной
характеристической скорости к другой:
и
I'i^Ii-CiV (b'jlcj)lj. (2.33)
/= i
В качестве характеристических скоростей наибольшее распрост-
ранение получили следующие: 1) в системе Фика среднеобъемная
п п
скорость V= S Ci vOi(bj = CiVOi, S с,- V, = 1); 2) в системе
i=1 i=l
Хиттофа V =Vk (bk = 1, bi = 0,i^=k)\ 3) в системе частиц средне-
п
молекулярная скорость V= X х,-К,- (h,-=x,); 4) в системе цент-
п i-l
ра масс V= S (pj/р) Kf. Помимо указанных систем возможны
i= 1
и другие системы, например основанные на скоростях деформаций
кристаллических решеток. Выбор характеристической системы
определяется спецификой поставленных перед моделированием
задач.
37
Уравнение Стефана—Максвелла записаны в системе Хиттофа:
— Vk), К = Соотношение (2.33) позволяет перейти
к любой другой характеристической системе. Так, для исследова-
ния АВП (1.1) в жидких средах (растворах) наиболее удобной
является система Фика, позволяющая явным образом отделить
конвективные движения.
Для иллюстрации использования соотношений (2.26) —(2.33)
остановимся на построении уравнений для потоков Фика. Для
наглядности ограничимся системой с и = 3, где первым компонен-
том (к = 1) является ’’растворитель”. В терминах базовой модели
(1.1) такая система является двухкомпонентной, и, следовательно,
необходимо связать матрицу {Dy} (1.2) с {Dy} (2.27). Пониже-
ние размерности системы обусловлено наличием связи между
потоками Ё Уо14 = О-
Используя (2.33), получаем (b\ = l,b2 = b'3 =0)
Ci ” CiVas п
~ h =Ii + S —'4= S a,y4, (2.34)
Cl j-2 CjUoi /-2
где ay = by +ciV0jl(c1v01), 8 у - символ Кронекера. Переходя
от l'j=Cj(Vj — И) к потокам Фика (2.34), получим уравнение
вида (для grad Г = 0)
п
Dylj. (235)
/ = 2
Матрица {Dy} уже несимметрична, в отличие от {Dy}. При по-
строении зависимостей Dy от Dy следует учесть соотношения
(2.27) —(2.30) и в окончательных выражениях оставить только
Z>2i > ^3i > 2>з2, т.е. коэффициенты диффузии компонентов отно-
сительно растворителя и друг друга. Проделав несложные выклад-
ки, получим
D22=—[x3/D32 + (X2/D2i )(1 + С2У(п/с1и01 )J/C> (2.36)
D23 ~ (x2Ic)(]JD32 — Vo3ID2ivOi). (2-37)
Выражения для D33 и D32 получаются из (2.36), (2.37) путем
замены индекса 2 на 3.
Решив систему линейных уравнений (2.35) относительно пото-
ков и воспользовавшись (2.31) (Ти р постоянны), получим
4 = 2 SU\ l^p.T^r 2 (2.38)
j = 2 Xctil / j = 2
В случае идеальных смесей или слабых растворов химический
потенциал определяется выражением д; = /?7’lnx/+ const [130].
38
При этом формула (2.38) приобретает вид
£,= 2 (а у/с) gradp rс, = S Degrade,-. (2.39)
/=2 / = 2
Если теперь перейти к системе отсчета с характеристической
скоростью, равной нулю, то мы получим выражение для потока
1-го компонента в виде (1.2), где V совпадает с характеристи-
ческой скоростью в системе Фика, т.е. является среднеобъемной
скоростью движения среды.
Приведем формулы для коэффициентов диффузии Dy в случае
идеальных смесей. Если x2/xj<l ил3/л,<1, то выражение
для определителя матрицы {Dy} упрощается: det (Ду) ~
«в а22азз / (с2£>и £>'31) и соответственно
£*22 = ~[*1^21/а22 +^2^21^31 /(^23а22а3з)]>
(2-40)
D23 ~ x2[^21(.v02lV0\ ) ~ D21D31/D23] /(а22а3з)г
a D33 и D32 получаются из (2.40) заменой индекса 2 на 3.
Коэффициенты Dy уравнения Стефана—Максвелла, в отличие
от коэффициентов Фика £)f/-, слабо зависят от концентрации, а
для идеальных разбавленных смесей не зависят вовсе. Поэтому
выражения (2.40) правильно определяют характер зависимости
коэффициентов диффузии Фика от концентрации. Они позволяют
сделать ряд важных выводов.
Коэффициенты взаимной диффузии D32 и D23 обращаются в
нуль при Сз =0 и с2 =0 соответственно. Симметрия матриц {Dy}
в (1.2), (2.39) не имеет места. Более того, вполне допустимо,
что знаки {£>32} и {D23} различны. Однако следует подчеркнуть,
что определитель матрицы {Dy} положителен, если имеет место
неравенство det{£)y} >0, которое должно выполняться в локаль-
но-стабильных (метастабильных) состояниях среды. Отсюда (см.
также (2.40)) следует, что должно выполняться условие
> 0.
Вычитая выражения для D22 и D33 друг из друга (2.40), можно
показать, что коэффициенты взаимной диффузии в (1.2) могут
быть равны нулю только тогда, когда коэффициенты самодиф-
фузии D22 и D33 равны между собой:
£>22 —D33 =(1 — Хз)(£>2з/*2) — (1 — х2){Рз21хз) (2-41)
В общем случае аналог (2.41) можно получить, пользуясь лишь
свойством симметрии Онзагера для коэффициентов представления
потоков в системе Хиттофа и выражением (2.38) для потоков
39
(2.42)
Фика и преобразованием (2.34) [186]:
" £ Эд,-
S Ё aik " Dki -
i = 2k’=2 bcm
п п dlli
“2 S aik — Dkm (l,m = 2,3,... ,n).
i = 2k = 2 dCi
Соотношение (2.41) также вытекает из (2.42) в случае тройных
идеальных смесей: Эд2/Эс3 = Эд3/Эс2 = 0, с2дц21дс2 = адр3/дс3
и i>oi =i>02 =1>оз -RTIp. Эти соотношения показывают, что матри-
ца диффузии в (1.2) может быть диагональной только в случае
равных между собой диагональных коэффициентов, которые для
идеальных смесей имеют порядок x,-Dw; в частности, для слабых
растворов они обычно малы, но не равны нулю.
Рассмотренный термодинамический подход легко переносится
на растворы электролитов, плазму и другие системы, имеющие
дополнительные связи между потоками. Так, для растворов элект-
ролитов такая связь является следствием условия электронейт-
ральности [219, 222]:
2 (zi+ci+ + z,-_c,_)= 0,
i = 2
(2.43)
где z, + , z,-_ — электрохимические валентности положительных
и отрицательных ионов /-го вещества. Это условие и определяет
связь между потоками. Например, при п = 2 и отсутствии внешнего
поля получаем K+c+z++ K_c_z_ = 0 и, следовательно, V+ = V_
или 7+ = /_, т.е. число независимо перемещающихся компонентов
уменьшается на единицу. В общем случае число независимых
потоков равно сумме чисел видов молекул и ионов за вычетом
числа реакций локального химического равновесия и единицы.
Поэтому для одного вещества, диссоциирующего на два иона
с константой диссоциации а, получаем один независимый поток:
12 = -Ogradc2,1+ = v+al2 и = v_al2 (г+, v_ - коэффициенты
распада ионов).
Найдем выражение для D, пользуясь уравнениями Стефана-
Максвелла (2.27)-(2.30). Ограничимся случаем полной диссо-
циации. Такая система является трехкомпонентной: xw (раст-
воритель),х+ их. (ионы). Для ’’сил”fj (см. (2.35)) справедливы
приведенные ранее выражения (2.36), (2.37), в которых следует
учесть связь между потоками c+z+ V+ - -c_z_V_ и x+z+ = -x_z_.
Подставим эти соотношения в (2.35)-(2.37) и сложим получен-
ные для f+ и /_ выражения. Химические потенциалы запишем
в следующем виде: д/=Л7’1пв, = Л7’1п(у/Л/) (а,- и у,- - актив-
ность и коэффициент активности /-го компонента). Сделав не-
40
(2.45)
^sw ~
сложные выкладки, придем к обычному представлению для по-
тока Фика:
Is = -Z)Sw c2i>ow grades = -Dsvf grad cs, (2.44)
n
гдеучтено, чтос?и0 = S voidxt + (9u0/9T) dT+ (bv0/bp)dp,
1 = 1
и для изобарных, изотермических процессов получаем с2 v^dXj =
= dci- Единственный коэффициент диффузии определяется сле-
дующим образом [217, 222] :
1 1 V1/ Э1п\/у+7_
—_ + __— 1 11+ --------------
D' 91nxs
Коэффициенты диффузии катион — растворитель и анион — раство-
ритель ф+w и DLW) можно получить из экспериментальных
данных по электропроводности различных растворов. Подчеркнем,
что коэффициенты активности ионов в растворах зависят сложным
образом от концентрации, и поэтому Dsw — как правило, нелиней-
ная функция xs. Однако вдали от областей фазовых переходов
зависимости не слишком сильные; в базовых моделях АВ-явлений
можно полагать их постоянными.
Таким образом, представление потоков (1.2) для базовой моде-
ли оказывается достаточно универсальным. Еще раз обратим
внимание на то, что при построении модели заранее полагать Dtj = О
(1¥=/) в (1.2) неправомерно. Например, перенос в системах типа
(А"В+)2, (А"С+)з и (W-растворитель) 1 описывается четырьмя
коэффициентами, D22, D33, D23, D32, и независимыми потоками,
12,13. Рассмотрение, аналогичное (2.36), (2.37), (2.45), но значи-
тельно более громоздкое, показывает, что при полной диссоциации
следует ожидать, что D23 < 0 и Z)32 < 0, а по порядку величины
они сравнимы с D22, D33. Поэтому такую систему можно считать
базовой при исследовании влияния взаимной диффузии на АВ-
явления. Обратим внимание на то, что далее мы будем снова назы-
вать систему и-компонентной по числу уравнений п в (1.2) (или,
иначе говоря, по числу независимых потоков).
2.4. Интегродифференциальные уравнения
и их редукция к базовой модели
Математические модели, рассматриваемые в нашей книге как
базовые (1.1) - (1.2), не могут, очевидно, считаться единственными
при описании АВП. Действительно, в общем случае любая система
уравнений в частных производных может быть сведена к интеграль-
ным или интегродифференциальным уравнениям. Для этого доста-
точно, например, воспользоваться функцией Грина линеаризован-
41
Рис. 2.4. Конструкция электролюминесцентного преобразователя изображе-
ния (в) >1 схема преобразователя, иллюстрирующая аналогию с нервной
сетью (6) [74]
ной краевой задачи. Обратное утверждение, вообще говоря, не-
верно, т.е. интегральные уравнения представляют более общий
класс описаний АВ-систем. Ниже мы остановимся на примерах
редукции таких систем к моделям вида (1.1)—(1.2). Важность
этого вопроса обусловлена тем, что для (1.1) —(1.2) уже извест-
ны многие базовые типы структур, а также разработаны качествен-
ные методы исследования. С другой стороны, понимание условий
редукции должно помочь выделить классы наблюдаемых явлений,
для моделирования которых следует использовать более общие
схемы, нежели использованные в (1.1) - (1.2).
Рассмотрим один класс задач, допускающих редукцию к базо-
вой модели. А именно, рассмотрим среды, в которых существуют
непосредственные связи не только между соседними ’’элементами”
среды, но также и между удаленными. Такие среды описываются
интегродифференциальными уравнениями. Их примерами могут
служить нейронные ансамбли [175,137], электронно-люминесцент-
ные усилители — преобразователи изображения (ЭЛУ) [74].
Остановимся на модели ЭЛУ. Типовая конструкция ЭЛУ по-
казана на рис. 2.4а. ЭЛУ представляет собой стеклянную пластин-
ку 6, покрытую прозрачным слоем SnO2 (или 1п2О3, или CdO)
и служащую тыловым контактом усилителя 5. На такой контакт
наносится слой электролюминофора 4. Между электролюминофо-
ром и фотослоем 2 помещается экран 3, предназначенный для
образования (или, наоборот, разрыва) положительной обратной
связи между электродами. Входное оптическое изображение,
сформированное в фотослое 2, преобразуется в изображение
на поверхности электролюминофора 4 с заданным разрешением,
контрастностью и яркостью. Вторым электродом служит либо
прозрачная проводящая пленка, либо сетка из металлических
42
проводников 1, укладываемых в фотослое. Между электродами
прикладывается переменное возбуждающее напряжение и. ЭЛУ
выполняются как в мозаичном, так и в континуальном исполнении.
При некоторых упрощающих предположениях математическая
модель для описанной схемы (рис. 2.46) записывается $ следую-
щем виде [74]:
дх
’’й т- ~хо —х +-^б1^об + f Sb(t — г)В(%, t) d£],
Ot — оо
ду “
’’г — =Уо-У+^т[ f STa-r)Ba,r)d«,
ot — 00
где х, у (и х0, у0) - рабочие (и темновые) проводимости фото-
резисторов, ть и тт - постоянные времени фоторезисторов,
S (£ — г) — колоколообразная функция связи, а функция В (£, t)
зависит от ха у:
В(£, 0 = bq “ [(х + y)/V(x+y)2+w2C2], (2.47)
b = const, q — амплитуда возбуждающего напряжения с часто-
той w, С — емкость системы, а = 2 4- 6.
Сделаем замену переменных £ =i? + r и разложим В(т? + г, t)
в ряд вблизи точки г; получим
7 S^-r)B(^t)d^
— оо
= ,f S(q)B(q+r,t)dq = S bt —у,
-ОО 1 = 0 or
bi= 7 X~ Skriy^dq. (2.48)
_oo I’
В силу симметрии S (т?) относительно центра Ь, = 0 при нечет-
ных i четные коэффициенты разложения в (2.48) bt (i-21) опре-
деляются главным образом формой функции связи S (г?) — ядром
интегрального преобразования (2.47). Пусть для определенности
S (т?) является гауссовой кривой (распределением): S (т?) =
= exp(-i?2/ro), где г0 имеет смысл ширины распределения. Тогда
получаем bt ~Ь21 = [1 • 3 • 5 ... (21 - 1) Vn(r0)2i+l]/[(2i) !2'] =
~(hr‘o+l (если i> 2, то fl, < 1). Для оценки производных функции
можно использовать масштаб наиболее резких изменений х и у;
например, для квазигармонических процессов ими будут X —
длины волн. Члены разложения имеют порядок 0f (г0/\)‘. Поэтому
в длинноволновом приближении допустимо оставлять только
43
первые члены разложения (2.48) :
Эх
?ь — = - *о - х + Аь(Ьь 0В + Еоь) +
dt
9 Г Эх
+ Abbb,2~ Dxx — +Dxy
or L dr
9y
тт— = Уо-У+Атьт>ов +
Эу
Эг
(2.49)
9 by Эх ]
+ АГЭГ2— Dyy— + Dyx — ,
br br 9r J
где Dxx - Dyy =Dxy -Dyx = bB/bx = bB/by = bqaco2c2/[(x + y2) +
+ <o2c2]3/2. Таким образом, модель (2.49) удается редуцировать
в длинноволновом приближении к базовой модели, описывающей
ряд АВП, в частности локализованные стационарные диссипативные
структуры. Подчеркнем, что окончательное суждение о правомоч-
ности приближения длинных волн можно делать только после
анализа редуцированной модели (2.49).
Обратим также внимание на то, что коэффициенты взаимной
диффузии в обсуждаемой модели равны коэффициентам самодиф-
фузии компонентов. Причем Dxy Ф 0 при х = 0 v.Dyx Ф 0 приу = 0.
Этим подобные обобщенные базовые модели отличаются от рас-
смотренных в предыдущем параграфе моделей систем с переносом.
К числу таких моделей принадлежат системы с Du < 0 (или
det{Z)f/ } <0). Например, если в качестве В (х, у) в (2.46) рассмот-
реть функцию видах/ [(х +у)2 + со2с2], то получим, что/)уу < 0 и
Z)xx>0. Конечно, обобщенные модели представляют интерес, но
им присуща определенная специфика. Поэтому обычно ограничи-
ваются исследованиями моделей с Z),,- > 0 и det {Dy} > 0.
Завершая иллюстративное обсуждение интегродифференциаль-
ных уравнений, подчеркнем, что их редукция к (1.1)- (1.2) нужна
скорее для качественного анализа возможных решений, так как
базовые модели более просто классифицируются по типам решений.
В отношении строгих исследований исходные модели могут иметь
преимущества; в частности, численный эксперимент проще выпол-
нять для интегральных уравнений.
2.5. Примеры базовых моделей автоволновых систем
Строгое математическое описание большинства реальных АВП
может быть проведено лишь с помощью многокомпонентных
моделей (1.1) - (1.3). Однако, как уже неоднократно подчерки-
валось, качественные особенности, а часто и основные их количест-
венные характеристики, такие как скорость, приближенная форма
44
БФ или БИ, могут быть получены с помощью базовых моделей
первого — третьего порядков.
Базовые модели строятся либо путем редукции систем уравне-
ний более высокого порядка, либо исходя из известных физико-хи-
мических механизмов, либо путем идентификации решений модели
с наблюдаемыми во времени и пространстве кинетическими зависи-
мостями. Отнесение мддели в разряд ’’базовой” должно быть связа-
но с возможностью наиболее просто и наглядно продемонстриро-
вать на ней условия возникновения и существования определен-
ных типов АВП. В теории нельзя ограничиться какой-то одной
базовой моделью, так как модель либо будет слишком сложна и
громоздка, либо будет описывать только некоторые АВ-явления.
С другой стороны, различные базовые модели, конечно, не являют-
ся независимыми - их решения могут соответствовать одинако-
вым типам АВП. Ниже приводится сводка основных базовых
моделей, которые используются в настоящей книге, а также в
большинстве работ, посвященных теории автоволн.
1. Простейшим классом АВП, для которого была предложена
математическая модель, явился бегущий фронт, или волна пере-
броса. В [114, 225] применительно к задаче о распространении
доминантного гена в пространстве исследовались решения одно-
компонентной модели вида (1.1) - (1.3) для п = 1 uDi = const.
Эта же модель использовалась в теории распространения пламени
[94] и волн, связанных с фазовыми переходами как в объеме,
так и на поверхности (см. гл. 1). Конечно, решения в виде БФ дают
и более сложные модели — этим вопросам посвящена гл. 4. Отме-
тим также, что простейшие модели имеют и другой класс решений -
стационарных во времени и периодических в пространстве. Однако
эти решения, как неоднократно показывалось (см., например,
[209]), неустойчивы при любых F! (xj) и Dx = const. С другой
стороны, спонтанное возникновение метастабильных локализован-
ных структур возможно в однокомпонентных системах, но уже
при наличии определенных зависимостей Z>i отх2 (см. гл. 7).
2. Асимптотическим поведением плоского БФ может быть не
только равномерно поступательное движение, но также более
сложные формы движений, например движение с пульсациями
скорости. Базовая модель для таких ситуаций должна включать
не менее двух переменных. Задачи моделирования таких АВП
впервые возникли в связи с проблемами теории горения (см. § 1.4
и 4.3). В качестве базовой используется следующая система урав-
нений:
дх д2х by b2y
. (2.50)
45
Здесь обычно х - температура среды, у концентрация лимити-
рующего реакцию горения реагента, у — константа. Функция Q(x,y)
удовлетворяет закону Аррениуса и имеет вид
Q(x, у) = yq ехр(-Е/кх), (2.51)
где Е— энергия активации,к — постоянная Больцмана,q—константа.
В качественных исследованиях используется упрощенное представ-
ление функции источника Q- (х - хi) (х - х2) у.
EarnDx = Dy,то, сделав замену переменных х’ = х — уу,' у' =
= х + уу, приходим к одному уравнению, обсуждавшемуся в слу-
чае 1. Таким образом, частным случаем модели (2.50) является
простейшая модель БФ.
3. Следующим классом АВП является БИ. В качестве базовой
модели в этом случае используются уравнения вида
Эх Э2х
е— ~F(x, У) + Dx —- ,
St х dr2
Эу (2.52)
— =V>(x,y).
ot
Нуль-изоклина переменной х (Е(х, у) = 0 на фазовой плоскости
х, у) является N-образной кривой, а е - малым параметром. Такая
форма нуль-изоклины обусловливает локальную положительную
обратную связь: dF/dx |п > 0, где £2 — некоторая область значений
х и у, или, другими словами, определяет автокаталитические свой-
ства переменной х. Далее, если это не будет оговариваться особо,
х означает автокаталитическую переменную.
Для специального, но вместе с тем обширного семейства моде-
лей введено специальное название: модель Фитц-Хью — Нагумо
[173],в которой
F(x,y) = -y+ х-х3, >р(х, у) = b - у + ух. (2.53)
Эта модель позволяет исследовать стационарное распространение и
формирование БИ (см. гл. 4), деление фронтов БИ, АВ-режимы
’’эхо” (см. гл. 5) и другие явления. Если константы b и у таковы,
что в точечной системе имеются три особые точки, то в распреде-
ленной системе возможно распространение БФ и БИ. Особенно
ясно видно, что модель (2.53) является развитием модели Колмо-
горова - Петровского - Пискунова — Фишера, если положить
у = const. Тогда первое уравнение (2.53) превращается в уравнение
распространения БФ. Если же систему (2.53) дополнить третьей
переменной (например, считать у переменной), то можно получить
модель стабильных ВЦ (см. § 5.3). Обсуждаемая модель является
базовой для исследования АВП, основным элементом которых
служит БИ.
46
В теории распространения нервного импульса имеются убеди-
тельные доказательства и примеры возможности редукции весьма
сложных систем к базовой модели БИ. В основополагающих
работах [229 , 250] анализ экспериментальных данных привел к
созданию четырехкомпонентных моделей, решение которых прово-
дилось на ЭВМ. В цикле работ группы Кринского [100, 118] найде-
ны не только условия редукции сложных моделей к базовой форме
(2.53), но также предложена экспериментальная методика, позво-
ляющая построить нуль-изоклйны базовой модели.
Итак, уравнения типа Фитц-Хью — Нагумо можно считать про-
стейшей моделью БИ. В других моделях используются либо более
сложные функции F(x, у) и (х, у), либо более общие диффузион-
ные связи, либо то и другое вместе. Например, рассматриваются
функции F(x,y), для которых уравнение F (x, у) ly = const= 0
имеет пять или более нулей. Полезно помнить, что возможны
такие вариации формы нуль-изоклин, которые не влияют принци-
пиальным образом на режимы точечной системы, но существенно
сказываются на характере АВП в распределенной системе. Поэтому
в теории БИ не удается ограничиться какой-либо единственной
базовой моделью. Неоднородная модель Фитц-Хью — Нагумо с
коэффициентами, зависящими от координаты г, пригодна для
решения некоторых задач синхронизации. Если же в нее включить
диффузию (/-компонент) и положить Dy > Dx, то модифицирован-
ная модель будет описывать стационарные периодические распреде-
ления или ДС. Однако традиционно для этих целей используются
другие модели.
4. Модель ’’брюсселятор” занимает по числу посвященных ей
работ уникальное место в теории ДС и, в частности, в теоретиче-
ской биологии. Значительный вклад в исследование этой модели
внесла Брюссельская школа И. Пригожина, имя которой она и
носит [62, 145]. Схема химических реакций, положенных в основу
точечной кинетики брюсселятора, восходит еще к пионерской
работе Тьюринга [260] и имеет следующий вид:
к1 кг
1) А X, 2) 2X + Y ЗХ,
fc-i к_2
kg /t
3) В + X Y + D, 4) X +* Е.
k-i к_4
Суммарная реакция, соответствующая этой схеме, представляется
в виде A + B<tE + D, аХи Y представляют собой промежуточные
вещества. Автокаталитической является реакция 2). Если для
упрощения положить, что константы скоростей всех прямых
47
реакций равны единице, а обратных — к_, то для концентраций х и
у получим следующие кинетические уравнения:
dx _ ,
— = А + х2у - Вх + k_(yD + Е - х - х3),
dy
— = Bx~x2y + k_(x3-yD).
&
Как правило, при исследовании распределенного варианта модели
делается еще одно допущение, а именно, пренебрегают обратными
реакциями (к_ = 0). Такую упрощенную модель чаще всего назы-
вают брюсселятором. При В > А2 + 1 брюсселятор имеет предель-
ный цикл. Если сделать замену переменных х = х' и х + у =у', то
получим систему с N-образной х'-нуль-изоклиной. В этом брюссе-
лятор подобен фундаментальной базовой модели Фитц-Хью — Нагу-
мо. Однако, в отличие от nee,F(x', у) содержит квадратичный
член, который определяет некоторые особенности модели в отно-
шение ДС (см. гл. 7).
Уравнения базовой модели — распределенного брюсселятора,
которые будут использоваться в последующих главах, имеют вид
Эх Э2х
— = -4 + х2у - (В + 1) х + Dx —- ,
bt br2
Эу ’, Э2у
где А и В являются константами.
5. При учете взаимной диффузии компонентов можно построить
АВ-модели, точечные системы которых активных свойств не прояв-
ляют. В качестве интересного примера рассмотрим следующую
схему реакций:
1) A + Y-+X, 2) B + X->Y + D,
3) Х+Х->С, 4) Y+P~>E.
Такая система при любых начальных условиях приходит к стацио-
нарному состоянию.
Теперь в соответствии с результатами § 23 запишем ее распре-
деленную модель в виде
bx . b /
— =Ау- Вх-х2 +—I Dxx
bt эА
Эх by
---Юху —
br у br
Эу Э / by
— = Вх ~Ру+—(Dvv — + D
bt Z br \ yy br
(2.55)
48
Оказывается (см. гл. 3 и 7), что при отрицательных значениях Dxy
wDyx всегда найдутся такие значения концентрации вещества А,
что в системе возникают ДС. (Как мы увидим в гл. 3 и 5, система
(2.55), дополненная третьей переменной, дает модель для АВП
типа ВЦ, стоячих волн и тл. в случаях, когда точечные системы
имеют ’’неактивную” кинетику). По-видимому, целесообразно
модели вида (2.55) выделить в отдельный класс. Такие модели
описывают разнообразные АВП при минимальных требованиях
к точечной кинетике, основное из которых сводится к тому, чтобы
система имела достаточно большой ’’приток” извне; в случае
(2.55) это приток вещества А.
6. В теории АВП иногда используются так называемые ” Х-ш”-си-
стемы:
dW
— = [F(/?) + jP(R)] W + div grad W, (2.56)
dt
где W = x + jy (; = \ЛТ),или
Эх
— = F(R) x - P(R)у + div grad x,
ЭТ
Эу
— = F(/?)y + P(/?)x + div grady.
dt
Здесь F wR - действительные гладкие функции,/? = IWI =\/x2t-y2;
предполагается также, что F(R) > 0, F(R) < 0 и F(R) = 0 приR < О,
/?>0 и/? = 0; P(R)>0 при R>0. Эти функции обеспечивают
существование устойчивого предельного цикла в точечной системе,
имеющего форму окружности. Для анализа АВП в X - со-системах
легко применимы методы последовательных приближений, осно-
ванные на теории Флоке, так как известно точное нулевое (одно-
родное) приближение. Они использовались для иллюстрации разно-
образия АВП в реакционных системах с диффузией [251], как
одномерных, так и двумерных, и, в частности, вращающихся
волн — ревербераторов.
7. Значительный вклад в теорию АВП внесли работы, посвящен-
ные изучению моделей распределенной химической реакции Белоу-
сова — Жаботинского. Брутто-схема этой реакции выглядит сле-
дующим образом:
. Вго; л .ж бмк
1) Се3+ ---* Се4 , 2) Се4+ ----> Се3+,
Н+ Вг~
где БМК — броммалоновая кислота, а ионы церия могут быть заме-
нены, например, на ионы железа Fe2+ (Fe3+) или марганца, т.е.
существует целый класс подобных по схеме реакций. Эксперимен-
49
тальные данные показывают, что среди промежуточных реакций
имеются автокаталитические. Однако вопрос о том, какие именно
вещества обеспечивают автокатализ, остается до сих пор не выяс-
ненным. Дело в том, что, несмотря иа простоту брутто-схемы,
система весьма сложна, так как содержит не один десяток проме-
жуточных компонентов. Предложено несколько моделей реакций.
Одной из первых была модель Жаботинского [81]:
dx
-~- = 0у(1 -х)-ух,
at
е-~-~ =0у [1 -*(1 +а1) + 0'- “О2] + ^,
at
где х - концентрация ионов Се3+ (Fe2+), у - концентрация авто-
катализатора. Коэффициенты модели были подобраны эмпири-
чески из сравнения параметров автоколебаний с данными экспе-
римента.
Филд и Нойес [224] построили модель, получившую впоследст-
вии название ’’орегонатор”. Уравнения модели имеют вид
dx dy 2
— = РУ -7Х, — = ру - qyz - ay + rz,
dt dt (2.57)
dz
— =yfx- qyz - rz,
dt
где z — концентрация ионов Вг“, a x и у имеют прежний смысл.
Если предположить, что в модели (2.57) z является быстрой
переменной, и укоротить систему, то получится двухкомпонентная
модель, а структура фазовой плоскости х, у точно такая же, как
в модели Жаботинского. Наиболее существенным и, по-видимому,
единственным отличием этих моделей от системы Фитц-Хью —
Нагумо является наличие в них квадратичной нелинейности. В
нашей книге рассматривается как одна из базовых модель ’’орего-
натор”: при исследовании стоячих волн (§ 5.5) — полная система
(2.57), а в остальных случаях — укороченная по z-компоненту
система с диффузией (§ 5.4 и 7.4).
ГЛАВА 3
ПРИЕМЫ ИССЛЕДОВАНИЯ АВТОВОЛНОВЫХ СИСТЕМ
В названии этой главы мы использовали слово ’’приемы”, а не
’’методы”, стараясь подчеркнуть тем самым, что качественная
теория АВП только еще создается. Если брать за эталон состояние
дел с исследованием нелинейных сосредоточенных систем второго
порядка, для которых удается провести полное рассмотрение их
поведения в пространстве параметров, то подходы для изучения
АВ-систем будут выглядеть еще весьма не сформировавшимися.
В этом направлении имеются лишь отдельные частные, хотя и
важные примеры. Однако развитие качественных методов изучения
АВП, моделями которых являются квазилинейные уравнения
параболического типа, представляется нам перспективным. Это
обусловлено тем, что при их рассмотрении достаточно учитывать
конечное (обычно небольшое) число степеней свободы. Поэтому
основная задача при изучении АВП связана с умением ’’увидеть”
зти избранные степени свободы, найти стационарные решения,
исследовать их устойчивость и переходы между ними.
3.1. Основные этапы исследования
Метод нахождения решений определяется свойствами изучаемой
системы. Рассматриваемые здесь неравновесные системы харак-
теризуются наличием однородных стационарных состояний. Нерав-
новесные свойства и диффузионная связь между точками в таких
системах могут обеспечить также существование и нескольких
неоднородных стационарных решений, которые представляют
собой либо не меняющиеся во времени структуры, либо устано-
вившиеся волны, распространяющиеся с постоянной скоростью.
При этом одна из основных задач состоит в получении характери-
стик этих АВП: скорости фронта, ширина БИ и т.п.
Построение и аналитическое исследование АВ-решений во мно-
гом упрощаются, если те или иные параметры базовых моделей
можно считать малыми. Причем такие параметры не обязательно
присутствуют в исходной модели в явном виде. Например, малым
51
гараметром может служить расстояние, определенное в пространст-
ве параметров относительно точки бифуркации (ветвления реше-
1ий), мера близости искомого решения к известному и т.д.
Можно выделить два класса систем, содержащих малые парамет-
•ы. Во-первых, поиск решений упрощается в системах, содержащих
«алые параметры при производных.Их АВ-решения имеют разрывы
'крутые фронты), т.е. в них проявляются сугубо нелинейные
войства. Во-вторых, это слабо нелинейные системы, близкие к
воим точкам бифуркации, содержащие малые параметры при
единенных функциях. В обоих случаях, по существу, проводится
1азложение решений по малому параметру, но схемы применяемых
[ри этом методов несколько различаются (см. соответствующие
разделы книги). Часто выделение малых параметров является
важным этапом, определяющим успех всего исследования конкрет-
ого АВП.
Следующим шагом в исследовании АВП является изучение
стойчивости стационарных решений. При этом для каждого ста-
ионарного решения следует рассмотреть всю совокупность допу-
тимых возмущений.
Известные примеры АВП показывают, что неустойчивые стацио-
арные решения являются границами между областями притяже-
ия устойчивых структур. В этом прослеживается аналогия с
осредоточенными. системами второго порядка, для которых
нание характерных особых траекторий (предельных циклов,
собых точек, сепаратрис) полностью исчерпывает качественный
нализ такой системы.
Рассмотрение АВП, как правило, содержит следующие этапы:
) выделение характерных структур; чаще всего ими являются
(С или стационарные волны — автомодельные решения; здесь же
пределяются упрощенные характеристики этих структур; б) изу-
ение устойчивости структур; в) определение переходов от
еустойчивых состояний к устойчивым и переходов от одних
стойчивых состояний к другим.
Все эти этапы явно или косвенно присутствуют в приведенных
этой главе подходах.
В качестве примера первого этапа рассмотрим нахождение ста-
ионарного решения на фазовой плоскости. Одномерные стацио-
арные структуры и волны описываются математическими моделя-
>и в виде систем дифференциальных уравнений в обыкновенных
роизводных. Такие модели получаются из исходных уравнений
частных производных введением автомодельной переменной
= г ± Vt. Способы решения нелинейных уравнений в обыкновен-
ых производных в настоящее время достаточно хорошо развиты
41 и др-J. Обычно качественное рассмотрение возможных
2
Рис. 3.1. Нуль-изоклины ’’точеч-
ных” уравнений, соответствующих
системе (3.1)
решений проводят в фазовом пространстве. Многие примеры
нахождения таких решений будут приведены ниже. Рассмотрим
АВ-систему, математическая модель которой задана в виде
еЭх/Эг = Ъ2х/Ъг2 + F(x,y),
Эу/Эг = у>(х,у).
(3.1а)
(3.16)
Пусть функция F(x, у) = -у + х — х3, а \р(х, у) - кусочно-линей-
ная функция. Нуль-изоклины системы (3.1) показаны на рис. 3.1.
При этом справа от у-нуль-изоклины *р(х,у) > 0, а слева
(х, у) < 0. В ’’точечной” системе с такими изоклинами происхо-
дят автоколебания.
Покажем существование двух типов неподвижных стационарных
решений в системе (3.1). Для этого предположим независимость
решения от времени и перейдем к рассмотрению уравнений
d2x/dr2-у+х-х3 =0, у(х,у)=0 (3.2)
при условии dx/dr |r=±L = 0 (где т? = г). Возможные решения
(3.2) будем рассматривать на фазовой плоскости х, dx/dr.
Первый тип стационарных решений получается в случае, когда
переменные х и у меняются вблизи нулевых значений Xi <х3,
Уз < У < у\ (см. рис. 3.1). В этом случае для нахождения реше-
ний используются только ветви, связанные с падающими участками
на нуль-изоклинах F(x, у) = 0 и <р (х, у) = 0. Искомым стационар-
ным решениям соответствуют ограниченные траектории внутри
сепаратрисной петли (рис. 3.2). Видно, что в зависимости от длины
рассматриваемого отрезка 2 L может существовать различное
число решений. Так, например, на рис. 3.2 а жирными линиями
(7 - 5) показаны три стационарных решения. Основной особенно-
стью решений этого типа является гладкое изменение перемен-
ных х и у в пространстве (рис. 3.2 б).
53
Рис. 3.2. Гладкие стационарные решения (3.2). а - Фазовые траектории ста-
ционарных решений вблизи точки равновесия (х = 0, у = 0). б - Пространст-
венный вид гладких стационарных решений: х(г ) - сплошная, у(г ) - штри-
ховая линия
Рис. 3.3. Разрывные стационарные решения (3.2). а - В фазовом пространст-
ве жирная линия соответствует разрывному по у решению (штрихпунктиром
показана х-нуль-изоклнна, штриховой линией - у-нуль-изоклина). б - Изме-
нение в пространстве переменных х (сплошная линия) и у (штриховая)
Второй тип стационарных решений характеризуется разрывным
изменением переменной у в пространстве. Такие решения полу-
чаются в результате сшивания двух решений. Одно из них соответ-
ствует ветви 1 на нуль-изоклине ф (х, у) = 0, другое - ветви 3.
При этом переход с ветви 1 на ветвь 3 и, следовательно, скачок
переменной у происходят при некотором значении х*, 'которое
выбирается из условий непрерывности х и ее производной. Пример
54
одной такой траектории, соответствующей стационарному решению
с разрывом переменной у, показан на рис. 3.3 а в фазовом прост-
ранстве х, у, dx/dr). Само решение в пространстве показано на
рис. 3.3 б.
Таким образом, чисто качественными методами находятся суще-
ственно нелинейные АВ-решения, устойчивость которых, однако,
остается невыясненной.
3.2. Исследование устойчивости стационарных решений
Исследование устойчивости базируется на идеях Ляпунова.
В принципе соответствующий выбор функций Ляпунова позволяет
исследовать устойчивость к произвольным, а не только к малым
возмущениям. Однако регулярные способы построения глобаль-
ных функций Ляпунова неизвестны, поэтому такие исследования
требуют изобретательности: учета характерных особенностей кон-
кретных систем и процессов. Как правило, приходится ограничи-
ваться качественными или, в лучшем случае, оценочными результа-
тами, а зачастую просто указанием существования жестких перехо-
дов между различными состояниями системы (см. далее стационар-
ные ДС, ВЦ и другие режимы). Даже для таких сравнительно
простых и изученных проблем, как возникновение БФ и БИ, зада-
ча о направлении эволюции произвольных возмущений математи-
чески строго не решена. Для некоторых классов систем найдены
лишь пороги возмущений (см., например, [144, 173]). Сначала
скажем о втором методе Ляпунова, который получил развитие
в работах школы И. Пригожина по термодинамике необратимых
процессов [62, 145]. В качестве функций Ляпунова используется
производство энтропии вблизи стационарного состояния. Исследо-
вание устойчивости в малом сводится к задаче о знакоопределен-
ности квадратичных форм, что эквивалентно задаче о собственных
значениях матриц, получающихся при использовании схемы перво-
го метода Ляпунова, излагаемой далее. Подчеркнем, что оба под-
хода приводят к одинаковым результатам. Нами отдано предпочте-
ние первому методу лишь в силу его простоты и отсутствия этапа
построения функций Ляпунова (функционалов для неоднородных
состояний), не всегда являющемуся тривиальным.
Решение системы (1.3) представим в виде
х,- (г, /) = xim (г, г) +x’im (J, г), (3.3)
где Х/т (t,r) — исследуемое т-е стационарное решение системы;
оно, в частности, может быть однородным решением xim. Подста-
55
вив (3.3) в (1.3), получим уравнения для , которые, как при-
нято в теории устойчивости, назовем приведенными и представим
в следующем виде:
^xim _ и t I
(3.4)
где Mjf- — линейный оператор, a F/ не содержит линейных по х(
членов. Решения (3.4) должны удовлетворять также приведенным
граничным условиям. Исследование нетривиальных решений линей-
ной части системы (3.4) определяет устойчивость в малом реше-
ния xim для (1.3). Такое исследование легко выполняется
для однородных стационарных состояний xim, когда матри-
ца Мц имеет постоянные коэффициенты. В этом случае лю-
бое решение представляется в виде суперпозиции волн вида
(1Гкт \
/ —=—г I, где кт = irkm/L - волновое чис-
ХУ /
ло, а \т = L/km — длина волны. Далее мы будем опускать
индекс т. Легко получить условия существования нетривиальных
решений (Aik =#0) для каждой моды:
dev Му —
яА:\2 _
J" I Оч{х)-ркЬц = р,
ХУ /
(3.5)
где det - определитель матрицы, 6,у — символ Кронекера.
Полученное уравнение связывает комплексные частоты рк=8к ± ]шк
с длинами волн \к = 2 L/k и коэффициентами системы (1.3). Оно
обычно называется дисперсионным или характеристическим.
Отметим, что структура дисперсионного уравнения остается не-
изменной при переходе к дискретным аналогам АВ-систем. Учет
дискретности модели приводит к следующей замене в (3.5) :
(яА:/£)2£>,у — 2[ 1 - cos (яЛ/^)]Р//дисКр (* = 0,1.AM),
(3.6)
где Dij аискр - матрица диффузии дискретной системы. Если
дискретная модель является сеточной аппроксимацией непрерыв-
ной, то элементы матриц диффузии связаны соотношением
А/дискр = DijN2IL2. Как нетрудно видеть, для любой моды
(ее номер к фиксируется) при.А^-+«> (3.6) переходите равенство.
Для малых Nразличия велики: 100% при N = 3, 10% при N = 10
и т.д. Это обстоятельство следует учитывать в численных экспери-
ментах.
56
Задача об устойчивости в малом тривиального решения приве-
денной системы (3.4) полностью определяется знаками корней
дисперсионного уравнения; В простейшей классификации неустой-
чивостей можно выделить два класса: 1 — колебательная, 2 -
ДС-неустойчивость (иногда ее называют неустойчивостью Тьюрин-
га). Такая классификация неустойчивостей .соответствует двум
типам АВ-решений, а именно: колебательным (например, стоячим
волнам) и пространственно неоднородным стационарным реше-
ниям (диссипативным структурам). Тип неустойчивости опреде-
ляется числом корней с положительной действительной частью.
В случае колебательной неустойчивости для к-й моды число таких
корней четно, а для ДС-неустойчивости — нечетно. Другой форму-
лировкой признака ДС-неустойчивости является отрицательность
свободного члена дисперсионного уравнения: <?0(к’2) < 0.
Рассмотрим типовые дисперсионные зависимости, обращая вни-
мание в первую очередь на связь их вида с числом компонентов
системы, типом особой точки, соответствующей сосредоточенной
модели, и наличием недиагональных членов в матрице диффузии.
Остановимся на дисперсионном уравнении двухкомпонентной
системы (и = 2). Его коэффициенты определяются выражениями
<71 (№) = -[Л/п + М22 ~(Dn +D22)k2],
q0(K2) = (3.7)
— [(^ 11М22 + D22M, 1 — D i2 М21 — D21 М12 )—det{Z)jy} к2 ]к2,
где det{D,y } > 0 только для систем с активным переносом. Далее
мы будем полагать, что det {Dy} < 0.
Дисперсионное уравнение системы с и = 2 является квадратным
относительно к, и существуют два основных типа зависимостей
Re{pfc} = 6fc от к2, представленных на рис. 3.4. Области колеба-
тельной неустойчивости обозначены цифрой I, ДС-неустойчиво-
уравнения от волнового числа для системы второго порядка
57
сти — Ни устойчивости — III. Для систем с О12 = D21 = 0 все воз-
можные виды дисперсионных зависимостей получаются из пред-
ставленных на рис. 3.4 посредством параллельного переноса графи-
ков. Они различаются взаиморасположением областей I, II и III.
Коротко обсудим эти зависимости.
Колебательная неустойчивость возможна лишь в случае, когда
особая точка точечной системы является неустойчивым фокусом
либо узлом. Эта неустойчивость обусловлена автокатализом в сис-
теме — локальными положительными обратными связями (Л/н >0
или М22 > 0). Условия самовозбуждения могут выполняться для
конечного числа волн. Причем спектр самовозбужденных волн ог-
раничен сверху: к*р = (Л/11+Л/22)£2/[я2(7)11 +/Э2з)] и 6fe моно-
тонно убывает с ростом к2.
ДС-неустойчивость в системах с D} 2 = D2l =0 возможна только
при наличии автокатализа. Причем решения вида ДС в этом случае
существуют тогда, когда точечная кинетика физически реализуема
(см. гл. 7).
Наличие ДС-неустойчивости зависит от количественных соотно-
шений между элементами {Dl; } и матриц {Л/,,} . Исключением яв-
ляется. система с триггерной точечной кинетикой (/?о(О) < 0, и
особая точка является седлом), в которой всегда имеется область
ДС-неустойчивости. Однако для этой системы наиболее характер-
ными являются другие типы АВП (в основном это БФ) *).
Спектр самовозбуждаемых мод всегда ограничен сверху, если
все диагональные коэффициенты диффузии больше нуля. При
ОцМ221 (D22Мц) -+ 0 область ДС-неустойчивости на дисперсион-
ной зависимости рис. 3.4 неограниченно возрастает. Заметим, что
в этом случае возникают контрастные ("разрывные”) ДС (см.
гл. 7). Поэтому ширину области ДС-неустойчивости можно считать
эквивалентом степени релаксации в теории сосредоточенных
систем.
В системах с Dt 2 = D2! = 0 неустойчивости однородного состоя-
ния возникают только при наличии автокатализа: t > 0 или
М2г >0. В системе со взаимной диффузией компонентов
(О12 =# 0 и D21 #= 0) ДС-неустойчивость возможна даже при
М1г < 0 и М2 2 <0, т.е. когда особая точка точечной системы
устойчива при любых значениях параметров системы (см. пример
в гл. 7). Подчеркнем, что эта неустойчивость может возникать при
*) В триггерной системе с большим числом компонентов (и = 4) области
притяжения ДС могут занимать значительные объемы в фазовом простран-
стве переменных [61, 163].
58
Рис. 3.5. Зависимость действительных частей корней характеристического
уравнения от волнового числа для системы с п = 3 без взаимной диффузии
малых по сравнению с Ви, Z>22 коэффициентах Dt2 и О21.
В системах с большим числом компонентов дисперсионные зави-
симости могут иметь некоторые особенности по сравнению
с рассмотренными выше. Перечислим их на примере системы
с и = 3 [48].
Условия ДС-неустойчивости (<?о (к2) < 0) могут быть выполне-
ны также в системах без автокатализа (Мц < 0) за счет кросската-
литических цепей (Af(/, Mj t > 0, i =£j).
Если в системе с п = 2 возможны автоколебания, то для нее най-
дутся такие значения Dti, при которых имеется ДС-неустойчивость.
В классе систем с п = 3 содержатся системы, в которых Мц < 0
и Mit > 0, но [q0 (0) - Qi (0)^1 (0) ] > 0. Такие системы не имеют
областей ДС-неустойчивости ни при каких положительных значе-
ниях Dti, но автоколебания в них возникают в мягком режиме
(рис. 3.5а; см. пример в § 3.4). Заметим, что в подобных системах
автоколебания возникают за счет запаздывания в цепях кросската-
лиза и они не редуцируются к системам с и = 2 без потери авто-
колебательных свойств.
В отношении колебательной неустойчивости имеются более
существенные различия. На рис. 3.56 показан случай, когда сущест-
вует область колебательной неустойчивости в системе с неавто-
колебательной точечной кинетикой. Кроме того, в отличие от слу-
чая п = 2 реализуются дисперсионные зависимости, при которых
Re{pk } = 8k возрастает при увеличении к2. Примеры таких систем
рассматриваются в § 5.4. Отметим, что взаимная диффузия при
п = 3 дает тот же эффект в отношении колебательной неустойчи-
вости, как и при и = 2 в отношении ДС-неустойчивости, а именно:
оказывается, что при Dtj =# 0 АВП могут возникать в системе,
59
точечная кинетика которых ни при каких значениях параметров
системы не дает пространственно однородных автоколебаний.
Рассмотренными выше исчерпываются типы дисперсионных гра-
фиков, возможных и в простых системах с п = 3. Под ’’простыми”
подразумеваются системы, точечная кинетика которых имеет
только одну автоколебательную подсистему, простую грубую
’’особую” точку и т.п.
3.3. Аксиоматический подход
Наряду с теорией распространения нелинейных волн, которая
описывается моделями типа (1.1), получила развитие ’’аксиомати-
ческая” теория возбудимых сред. Первая работа, посвященная
этим проблемам, была опубликована Н.Винером и А.Розенблютом
в 1946 г. [263]. Начиная с работ И.М.Гельфанда и М.Л.Цетлина
(1960 г.) аксиоматическая теория успешно развивается в нашей
стране [39,116,184,190].
Существуют различные уровни описания объекта методами
аксиоматической теории. В простейшем варианте считается, что
активная среда состоит из дискретных элементов — конечных авто-
матов, которые могут находиться только в двух состояниях:
возбужденном и рефрактерном. Для применения аксиоматической
теории не требуется детальных знаний о кинетике реальных объек-
тов. Другим важным достоинством этого подхода является воз-
можность рассмотрения широкого класса задач в общем виде и
простота машинного эксперимента.
По сути дела аксиоматический подход представляет собой наибо-
лее сильную идеализацию метода анализа нелинейных волн. Счи-
тается, что элемент в такой системе может при внешнем воздейст-
вии генерировать стандартный импульс длительностью г, с фронта-
ми нулевой длительности, и за время R — т, где R — длительность
рефрактерного периода, он вновь возвращается в состояние равно-
весия. Скорость передачи возбуждения V считается заданной.
Соответствие аксиоматического подхода и характеристик качест-
венной теории нелинейных волн показано на рис. 3.6. В рамках об-
щей схемы в аксиоматическом подходе следует выделить следую-
щие особенности, а) В качестве характерного этапа выбран только
один импульс возбуждения. Характеристиками такого элементар-
ного процесса являются, как уже упоминалось, введенные аксиома-
тические величины. При схематическом изображении волны
в аксиоматическом подходе достаточно выделить только возбуж-
денные (области 1 на рис. 3.6в, г) и рефрактерные (области 2)
участки, б) Импульс предполагается устойчивым, в) Переходные
60
Рис. 3.6. БИ при аксиоматическом описании, а - На фазовой плоскости пока-
заны отрезки траекторий, соответствующие в аксиоматическом описании
-состояниям возбуждения (42?), рефрактериости (42?СО), покоя (малая
окрестность состояния равновесия О), б - Реальная форма БИ; штриховой
линией показан БИ в аксиоматическом описании, в - Изображение БИ на
плоскости гж, г2; г - на плоскости г, f; 1 - возбужденные участки, 2 -
рефрактерные
процессы формирования импульса не рассматриваются, хотя суще-
ствование их подразумевается, когда говорят о пороге возбужде-
ния. При начальных значениях переменных, меньших пороговых,
система переходит в равновесное состояние. В случае превышения
порога происходит формирование устойчивого стационарного
импульса.
С помощью аксиоматического подхода изучались и нервная
ткань [184], и сердечная мышца [100, 116], и химическая систе-
ма [81], и генетические сети [242]. Были предсказаны и описаны
качественно новые автоволновые структуры: источники им-
пульсов типа ’’эхо” (взаимный перезапуск соседних элементов
среды; см. § 5.1 и 5.2) и спиральные волны - ревербераторы
[20,116,255].
Здесь было указано лишь на простейшую систему постулатов
для активных сред. В ряде случаев она оказывается недостаточной
для разумного описания явлений, и приходится вводить, например,
61
существование многих стабильных состояний элементов и матриц
переходов между ними, случайность в передаче взаимодействий
элементов и т.д. Для изучения таких моделей разработаны универ-
сальные пакеты прикладных программ (например, [39]), которые
позволяют имитировать сложные сети конечных автоматов.
Аксиоматический подход развивается и далее; его полезность
в теории АВ-явлений не вызывает соменений. Однако существует
вопрос о тождественности описания явлений с помощью аксиома-
тических и динамических моделей. Математически этот вопрос о
соответствии решается рядом теорем, которые, в частности,
утверждают, что любой дискретный автомат динамически предста-
вим; обратное утверждение, вообще говоря, неверно. На практике
необходимо иэ динамических свойств точечной системы и знания
матрицы коэффициентов диффузии Dy постулировать свойства
дискретных автоматов [242]. Болгарские ученые Сендов и
Цанев (см. [170]) предложили модели, в которых объединяются
дискретные и кинетические методы описания коллективов
автоматов.
3.4. Дискретные модели
В разных методах исследования приняты свои идеализации.
В аксиоматическом подходе упрощение связано с предположением
дискретного изменения переменных системы в пространстве и во
времени. Следующий шаг с более подробному описанию исходных
систем состоит в учете непрерывного изменения переменных во
времени, а зависимость от пространственной переменной остается
дискретной. При таком подходе АВ-система представляется в виде
цепочки из конечного числа взаимодействующих элементов.
В простейших случаях такие дискретные модели имеют вид
d...............................
— ’Xj = ^('Х! , >х2..’xn) + (’Ii - ’/,•) =
at
= iFi(ix1, .... ’x^+diC^Xr-l >xi + ^Xi), (3.8)
i = 1, 2...n — номер переменной, / = 1, 2, ..., N — номер
элемента цепочки, 'Fj — функции точечной кинетики. Правая
часть (3.8) записана для дискретного представления потока по
Фику: = dt(j ). Между коэффициентом связи элемен-
тов df и диффузией в распределенной модели Оц существует
зависимость DaN2 /L2 = d{. При дискретном описании граничные
условия записываются через соответствующие значения потоков и
62
самих переменных на границах. Например, непроницаемость гра-
ниц цепочки записывается в виде °х, = 1х( и N+1Xj = Nx{, что
соответствует условиям 2-го рода =N+II( =0.
Правые части уравнений (3.8) являются одной из возможных
конечно-разностных аппроксимаций, используемой для систем
диффузионного типа и дающей Точность порядка О(й2), где
й = L /N — шаг [165].
Граничные условия вида °х,= ^обеспечивают точность лишь
порядка О(й); точность О(й2) обеспечивается условием-1*/ = *Х/.
Однако сумма всех правых частей (3.8) при этом становится не
строго равной нулю. Для АВ-систем такое положение нежелатель-
но, поэтому следует рекомендовать условие °Х/ = **/. Исполь-
зование трех (и более) точечных шаблонов для представления
потоков, что значительно усложняет модели, лишает их нагляд-
ности.
Выбор типа модели определяется задачами исследования и ти-
пом изучаемых процессов. Чтобы получить наиболее полное пред-
ставление о движениях в распределенном объекте, зачастую выби-
рают модель с таким большим N, что исследовать ее без примене-
ния ЭВМ невозможно. В то же время для оценки возможности того
или иного типа АВП при выбранных условиях можно использовать
простейшие дискретные модели (N = 2,3,...). Исследование таких
моделей весьма просто, и в то же время оно помогает понять ряд
существенных вопросов и развивает интуицию в отношении
изучаемого объекта.
При таком использовании простейших дискретных систем мож-
но опираться на следующее утверждение: если непрерывная модель
описывает некоторый АВП, то простейшая дискретная модель при
подходящих значениях d имеет неоднородное по пространству
решение с соответствующей временной зависимостью. Обратное
утверждение, вообще говоря, неверно, т.е. не все типы решений
дискретных моделей реализуются (остаются устойчивыми) в не-
прерывных моделях. Иллюстрацией этому утверждению может слу-
жить соответствие между решениями простейших дискретных
(Л^ = 2) и непрерывных моделей: 1) стационарные неоднородные
состояния ГХ/ =# 2Х/ (d'xj/dt = 0) соответствуют ДС, 2) анти-
фазные колебания lXj и 2xt — стоячим волнам, 3) постоянное
опережение по фазе одним из элементов, например ВЦ, 4) пере-
запуск элементов, например ’’эхо”. Таким образом, все основные
типы автоволновых процессов имеют образы уже в простейших
дискретных моделях.
63
Рассмотрим некоторые особенности описания простейшей
дискретной модели (7V= 2) :
d ‘х-
-' = F,(1x1) .... lxn)+dt(2Xj- 'xt),
at
d 2x- (3-9)
dt ' = Fi(2Xi, .... 2xn)+di( lX/~ 2Xi),
i = 1, n. Введем, как это принято в теории колебаний [180],
нормальные координаты:
Д, = (*х/-Ч-)/2, Si = exi^2xi)l2. (3.10)
В этом случае линейная часть модели (3.8) будет иметь клеточную
диагональную матрицу. Связь между синфазной (S/) и антифаз-
ной (Д,) модами осуществляется посредством их нелинейных
взаимодействий. С другой стороны, решение непрерывной модели
можно представить в виде разложения по гармоническим модам:
Xj - S Aik(t) cos(nkr/L). Непосредственной подстановкой
к = О
легко убедиться, что уравнения для А|0 и S,-, а также А,к и Д,
имеют одинаковую структуру (см. § 5.5). Зависимости решений от
параметров и характер их устойчивости в обоих ’’двухмодовых”
приближениях подобны, так что качественно результаты их иссле-
дований должны совпадать. Однако для ’’двухъящечной” модели
многие результаты можно получить и интерпретировать весьма
наглядно.
Рассмотрим применение фазовой плоскости в анализе АВП. Для
определенности остановимся на стационарных состояниях. Пусть
Fi = х2 и F2 = -xt + 6iX2 - 63X2 (6! > 0, 53 > 0). Нуль-изоклины
(линии Fi = 0 и F2 = 0) для такой кинетики и направления интег-
ральных кривых показаны на рис- 3 7. В таком поле интегральных
кривых имеются области, в которых интегральные кривые направ-
лены в противоположные стороны, т.е. под действием ’’точечных”
сил 1/71,2 и 2F1>2 изображающие точки (‘х!, *х2) и (2хь ах2)
должны разбегаться как вдоль оси О гх, так и вдоль О 2х. ’’Диф-
фузия” же действует таким образом, чтобы расстояние между изо-
бражающими точками уменьшалось. Равенство ’’точечных” и
’’диффузионных” сил обеспечит существование стационарных
неоднородных решений. Не останавливаясь на образах других АВП,
подчеркнем, что простота рассуждений при помощи фазовой
64
Рис. 3.7. Стационарные состояния
дискретной модели (У = 2) на фазо-
вой ПЛОСКОСТИ Хц, хг
плоскости обеспечивается основным свойством диффузионной
связи: она вдоль каждого направления фазового пространства
сближает изображающие точки. Отсюда, в частности, вытекает сле-
дующее утверждение: если в фазовом объеме не существует стацио-
нарных несовпадающих положений для двух изображающих точек,
то их не может быть для трех, четырех и т.д. точек и тем более для
непрерывной линии, являющейся образом (проекцией) стационар-
ного решения непрерывной модели.
В качестве примера укажем на одну из моделей колебательных
химических реакций [82]:
Fi =kiXi - к3ххх2,
Рг-kiXi-к2х2, F3 =к2х2 - к3х3, (3.11)
где kit к2, к3 больше нуля. Система с такими Ff может обладать
весьма нетривиальными АВ-режимами. Однако ее строгий анализ
весьма труден. Для двухъящечного представления многие положе-
ния получаются весьма просто: существуют режимы устойчивых
несинфазных колебаний, но не существует стационарных неодно-
родных решений (Д/(Д1 + а2) = 0). Таким образом, в столь слож-
ной ситуации удается получить общее свойство модели.
Если обобщение выводов о невозможности какого-либо АВ-яв-
ления на непрерывную модель, как правило, не вызывает трудно-
стей, то с выводами об устойчивости режимов дело обстоит слож-
нее. Это обусловлено наличием дополнительных пороговых
свойств у дискретных моделей. Проиллюстрируем это положение
на одном примере. Как известно [209], в непрерывной однокомпо-
нентной модели (п = 1) стационарные неоднородные решения
неустойчивы. На рис. 3.8 показана фазовая плоскость такой модели
(Fj = Xi — *1). Как видно, простейшая дискретная модель
65
(N - 2) уже обладает устойчивым неоднородным решением. Более
того, такие решения возможны при увеличении N до некоторого
критического значения. При больших N порог исчезает и все эле-
менты должны переходить в одно из состояний равновесия
( х или -х).
Аналогичные пороговые свойства имеются у систем с триггерной
точечной кинетикой при N = 2, а также у систем, в которых один
из Dit равен нулю. Пороговые свойства проявляются не только
Рис. 3.8. Фазовая плоскость
модели первого порядка
(и = 1): *х* й 2х* -устой-
чивые стационарные состоя-
ния в дискретной системе
(№’)
в отношении стационарных решений, но также и для колебатель-
ных. Подчеркнем, что поскольку в численном эксперименте прихо-
дится работать с дискретными моделями (пусть даже при боль-
ших N), то и здесь дополнительные пороговые свойства могут
проявить себя и могут быть получены решения, реализуемые в чис-
ленном эксперименте, но неустойчивые в непрерывных системах.
Предсказать возможность таких порогов в конкретных системах
можно уже после предварительного рассмотрения простейших
дискретных моделей.
3.5. Быстрые и медленные фазы пространственно-
временных процессов
Достаточно подробно в настоящее время разработаны приемы
качественного исследования таких АВ-систем, в которых могут
быть выделены стадии движения с резко различающимися прост-
ранственно-временными масштабами. Каждая выделенная стадия
описывается упрощенными по отношению к исходной системе
уравнениями. Кроме того, решения этих уравнений оказываются
асимптотически устойчивыми, и поэтому при переходе в описании
от одной фазы движения к другой очень естественно удается свя-
зать отдельные решения в одно общее, описывающее весь АВП.
Отметим здесь два варианта такого подхода на примере следующей
базовой модели АВ-системы:
дх д2х
тх—-=Ох-~у+Р(х,у), (3.12а)
Эг дг
66
by b2y
=Dy~~^Q(,x.y). (3.126)
dt or
В этих уравнениях имеются два параметра: е = тх 1т v — параметр,
определяющий соотношение характерных временных интервалов;
а = Dx ID у — параметр, определяющий соотношение пространствен-
ных масштабов.
Первый подход заключается в задании вида нелинейной функции
Р(х, у) непосредственно от пространственной и временной перемен-
ных, т.е. Р = Р(г — И) из уравнения (3.12а). При этом находятся
два стационарных БИ, имеющие различную форму. БИ с большей
амплитудой движется с большей скоростью и устойчив к малым
возмущениям. БИ с меньшей амплитудой неустойчив. Впервые та-
кой расчет скорости и формы БИ был проведен для модели нерв-
ного волокна (в котором функция Р(х, у) соответствует току
через мембрану), поэтому такой подход стал называться ’’иссле-
дованием модели с заданным генератором тока”. Отметим, что в
этом подходе присутствуют все три этапа поиска АВ-решений, о
которых говорилось в § 3.1. Действительно, решения в виде им-
пульсов — этап нахождения стационарных решений; два типа им-
пульсов различаются степенью их устойчивости к малым возмуще-
ниям; третий этап описания связан с представлением о неустой-
чивом импульсе как о границе, определяющей те возмущения,
которые приводят к формированию устойчивого БИ. Подробное
изложение приемов расчета в модели с заданным генератором тока
приведено в [137].
Второй подход, связанный с исследованием уравнений (3.12),
будет продемонстрирован для случая сильнорелаксационной систе-
мы (е< 1) и без учета диффузии медленной переменной (1/а-*0).
При этом вместо уравнений (3.12) будут введены приближенные
характеристики, с помощью которых в гл. 4 и 5 будет проводиться
качественное описание возможных нелинейных АВ-структур. Выде-
ление таких характеристик основано на очень простых соображени-
ях. Известные до сих пор решения системы (3.12) [51, 81, 100]
показывают возможность существования только трех фаз движе-
ния: а) стадия быстрых движений во времени и резких изменений
в пространстве (БФ), скорость БФпропорциональна 1/е; б)стадия
медленных движений во времени, но резких в пространстве (не-
подвижный фронт); в)участки медленных движений во времени и
плавных в пространстве (плато импульсов). На рис. 3.9 эти
стадии показаны с левой стороны. Для каждой фазы движения
используется ,своя приближенная характеристика. Это соответствие
показано на рис. 3.9а, б, в. Для краткости введем обозначения
этих характеристик с помощью римских цифр: I — зависимость
скорости фронта от медленной переменной; 11 — область парамет-
67
Рис. 3.9. Характерные фазы пространственно-временных движений в релакса-
ционной системе при е < 1 и характеристики, используемые для описания
динамики этих движений, а - БФ описывается характеристикой I - зависи-
мостью скорости фронта от медленной переменной; Т — участки, соответст-
вующие "триггерным” волнам, Ф - участки, соответствующие "фазовым”
волнам, б - Остановившийся БФ на скачке (от у, до у3) медленной пере-
менной. Характеристика II определяет область существования неподвижного
фронта в переменных у,, у3. в - Медленные движения плавных участков
качественно описываются с помощью характеристики III - нуль-изоклины
системы (3.1) при д*х/дгг = 0; укр соответствует нулевой скорости
БФ [201 ]
ров ступенчатого изменения медленных переменных у1} у3, соот-
ветствующая неподвижному фронту; III — нуль-изоклины систе-
мы (3.12). Описание решений с помощью приближенных характе-
ристик приведено в гл. 4 и 5. Здесь же дадим краткие определения
характеристик для каждой фазы в отдельности.
а) Зависимость скорости фронта от медленной переменной.
Характеристика I получена при условии, что ’’быстрое” движение
происходит в области плавного изменения медленной переменной
(характерный размер неоднородности намного больше диффузион-
ной длины /фр ^\/Dxtx, т.е. она применяется в отсутствие резких
изменений переменной в пространстве). В этом случае уравнение
для быстрых движений (3.12а), описывающее движение выделен-
ного фронта возбуждения, может быть заменено алгебраической
68
зависимостью V = К(у) — скорости фронта от V — медленной пе-
ременной в месте нахождения фронта [146]. Возможность такого
перехода связана со специальными свойствами решений уравне-
ния (3.12а). Произвольное начальное решение х (при у = const)
в виде перепада асимптотически (характерное время т * е) стре-
мится к стационарной волне с определенной скоростью движения
[105]. Метод нахождения скорости такой стационарной волны
представляет собой решение задачи на собственные значения. Он
обсуждается в § 4.1. Отметим только, что при ymin <у <Утах>
когда имеются три корня в уравнении ^|y = const ~ 0, скорость
имеет единственное значение и такую волну называют иногда
’’триггерной” волной или волной переброса. При у = утах или
У = У min скорость фронта имеет континуум значений больше
некоторого определенного значения (см. § 4.1). Это так называе-
мые ’’фазовые” волны. На рис. 3.9а приведена одна из возможных
зависимостей К= V(y).
Для некоторых функций Р(х, у) скорость ’’триггерных” волн
может быть вычислена в аналитическом виде (табл. 3.1). Из табли-
Таблица 3.1
Аналитические формулы для скорости БФ У(у)
Полиномиальные функции Р(х, у)
1. Р(х, у) = -у(у) [х - т, (y)J X V(y) = ± Vt/2 (m, + m3 - 2m3)
X [х - т3(у>] [х - т3(у)] (m, <m3 < m3)
2. Р(х, у) = -7(у) [х - т, (У) ] X
х [х - т3(у)] [х - m3(y)] х V(y) = alm, + m, + gm, mt mJ ,
х (1 + 0х +ах’), \ ° /
где а и 0 связаны через где
параметру:
а = 3^*/[2 +g(2m, -2m3 - Зт3)], a =
0 = ~g - a/g = ± {7/(2 + g(2m, - 2m3 - 3m,)!}1/2
Кусочно-линейные функции Р(х, у)
3. P(x, y) = -Xf [x - (y) ]; Vy = ± [Xt {m, - т3)г - - Xj(m3 - m2)2]/K,
i = 1, если x <mt, где K = {(m3 - тг)(тг - т,) X
i = З.если x > m3 х (т3 - т,)[Х3(т3 - т3) + + Х,(т3 -т,)}1/2
4. P(x, y) =7(y) [x - m3(y)J г„ 2ч/7 ln[(m2 -т,)/(т3 -т,)]
У\У) “ in я [(т3 - т1)Кт3 - тх)г'
при m, (У) < x < m,(y)
и m, < m3 < m3
69
цы видно, что для выбранных нелинейных функций скорость фрон-
та определяется разностью между порогами (т3-т2)и(т2 — mi),
соответствующими устойчивым состояниям в точечной системе.
При этом оказывается, что волна движется в таком направлении,
чтобы обеспечить переход системы из состояния с меньшим поро-
гом в состояние с большим порогом. Однако в общем случае на-
правление скорости определяется соотношением между площадя-
ми, ограниченными с одной стороны осью х, а с другой — положи-
тельными и отрицательными значениями функции Р(х, у = const).
В неоднородной, плавно меняющейся среде также можно пользо-
ваться зависимостью V= V(y). Отметим, что эта характеристика
может быть использована при любых значениях параметра а =
= DxIDy\ необходимо только, чтобы характерный размер прост-
ранственной неоднородности медленной переменной был много
больше /фр ^\/Dxtx.
б) Область параметров, соответствующая неподвижному фронту.
На заданной пространственной ступеньке медленной перемевдой
у (г) фронт возбуждения может быть неподвижным, если с одной
стороны ступеньки значения у больше укр, а с другой — мень-
ше укр. Обозначим медленную переменную в возбужденной об-
ласти через 71, 1 в невозбужденной области - через у3 (см.
рис. 3.96). Характеристика II представляет собой область на
плоскости У1, Уз, соответствующую таким значениям параметров
ступеньки у 1 и уз, при которых может существовать неподвижный
фронт возбуждения. Для определения границ такой области прове-
дем рассмотрение стационарных решений, соответствующих не-
подвижному фронту. Быстрых движений нет, следовательно,
производной по времени в (3.12) можно пренебречь.
Приближенное рассмотрение решений проведем в предположе-
нии заданного ступенчатообразного распределения медленной пе-
ременной у (г), для которого в возбужденной области у(г) = у3,
а в невозбужденной y(r) = у1Ф Эго возможно лишь в системах с
а > 1 (Dy ^Dx) (лишь в этом случае переменная у может менять-
ся быстрее в пространстве, чем переменная х).
Тогда решения для фронта находятся из уравнения
d2x0
Ох -у-г + р(*о(г), у (г)) = О
аг
(3.13)
со следующими граничными условиями:
dx0
dr
= 0, *о |r_>« =m3, Хо = mi-
(3.14)
Условия существования стационарных решений нагляднее всего
могут быть продемонстрированы в фазовом пространстве у, Хо,
dx0/dr. На рис. 3.10 показано, как составляется искомое решение
70
У^Уу г
Рис. 3-10. Решения уравнения (3.13) для скачкообразного распределе-
ния у (г): а — сшивка решений в фазовом пространстве; б - вид
решений, соответствующих траекториям mt (у,) 00'т} (у3) (кривая 1)
и (у,) 0.020'2 GJ т3 (у3) (кривая 2) ; в и г - вид решений для траекто-
рий от, (у,) О0'т3(у3) и mJ (yi)OlO*0*,m} (у3) соответственно [161]
(3.13) из двух решений этого же уравнения при постоянных значе-
ниях медленной переменной (у = у i и у =у3). Так как нас интере-
сует волна переброса между состояниями wij и m3, то искомому
решению соответствуют сепаратрисные траектории. На рис. 3.10
показано также, как происходит сшивка таких сепаратрисных
траекторий. Начнем движение от точки по сепаратрисной кри-
вой, соответствующей решению при у = yt. Мысленно проведем
вертикальную линию от изображающей точки на сепаратрисе.
Будем двигать точку (?i до тех пор, пока вертикальная линия
не пересечет в точке О{ сепаратрисную траекторию, соответствую-
щую решению уравнения (3.13) при у = у3. Значения хо Kdx'oldr,
соответствующие месту соединения сепаратрис через вертикаль-
ную линию О\О{, определяют условия сшивки решений в точке
ступенчатого изменения медленной переменной от yj к у3.
Получаем решение, соответствующее фазовой траектории
Wi(yi)OiC>; w3(y3). Пространственный вид первого решения
х0(г) приведен на рис. 3.106. Если продолжить движение
точки 01 по сепаратрисе в плоскости у ~ У\ (фазовая траектория
mi(yi)OtO*O2O2O* О^Шз(Уз)), то удается получить второе ре-
шение Хо(г), показанное на рис. 3.106. Значения переменных в
месте СШИВКИ Xq слева ~*0 справа И (dXo/dr )слева “(^-^0 А^*)справа
соответствуют положению линии О2О2 на рис. 3.10а. Таким обра-
71
Рис. 3.11. а - Область существования фронта с нулевой скоростью на плос-
кости у^з. В области 1 фронт неустойчив, а в области 2 устойчив к прост-
ранственным возмущениям типа сдвига. В точке D фронт неустойчив к
первой ’’изгнбной” моде возмущения, которое вызывает процесс деления
фронта, б - Пространственные распределения переменных х и у перед деле-
нием. в, г, д - Распределения х и у после деления фронта, отличающиеся
скоростями
зом, при заданных yt и уз имеются только два решения уравнения
(3.13), соответствующие переходу из mi в т3. Эти решения полу-
чены длл случая, когда значение у (г) в возбужденной области боль-
ше укр, а в невозбужденной - меньше укр. Если у з <укр (обозна-
чим егоуз), ау! >укр, то существует единственное решениех0(г),
связывающее wii(yi) и т3(у3) (траектория Ш1(У1)ОО'шз(Уз)
на рис. 3.10а). Его вид приведен на рис. 3.10в. Изменение у i иу3
на ступеньке медленной переменной приводит в решении Хо(г) к
изменению положения точек равновесия и значений х0 в точке
сшивки. Нетрудно убедиться, что существует интервал значений у i
и уз, в котором точка сшивки не исчезает и решения существуют,
хотя при этом может происходить некоторый сдвиг решения х0(г)
по отношению к ступеньке у (г).
Таким образом, на плоскости yi, уз можно выделить области
значений, соответствующие существованию решений уравнения
(3.13). Эти области и представляют собой искомую характеристи-
ку II. Для каждой нелинейной функции в (3.13) получаются свои
области существования стационарных решений. Примеры таких
72
областей показаны на рис. 3.96 и 3.11а. Отметим особенности
решений в двух различных областях характеристики II (см.
рис. 3.11а). Область 2 соответствует устойчивым, а область 1 —
неустойчивым, неподвижным волнам переброса. Вид решений в
области 2 показан на рис. 3.10в и 3.11а. Из таких устойчивых фрон-
тов может быть составлена диссипативная структура (см. § 7.4).
Решения, соответствующие области 1, показаны на рис. 3.106 и
3.116. Особо отметим, что точкам границы области 1 (рис. 3.11а)
соответствует критическое решение, имеющее в точке сшивки
плато с нулевой пространственной производной (рис. 3.10г)
(хо = х*, dxoldr = 0). При образовании такого решения два
Рис. 3.12. Качественный вид первых
двух мод пространственных возму-
щений: g, (г) - ’’сдвиговое” возму-
щение, (г) - первая ’’изгнбная”
мода
других решения (типа 1 и 2 на рис. 3.106) сливаются в одно. Крити-
ческому решению на фазовой плоскости соответствует траектория
"11(Д'1)О1О*О* "1з(>'з) (см. рис. 3.10а), полученная при касании
сепаратрисных петель.
Об устойчивости фронтов в областях 1 и 2 (рис. 3.11а) можно
судить по направлению тех движений, которые возникают при на-
чальном отклонении фронта от точки остановки на расстояние,
превышающее его длину. Для решений, соответствующих области2,
скорость фронта направлена к точке остановки, и он возвращается
в исходное положение. Для решений в области 1 возмущение,
обеспечивающее сдвиг решения (gi(r) на рис. 3.12), будет на-
растать (значение медленной переменной таково, что скорость
фронта направлена от точки остановки). Проведенное исследование
устойчивости к малым возмущениям и численный расчет [161]
подтвердили зги простые соображения. Нарастающая сдвиговая
мода возмущения gi(r) формирует устойчивый фронт возмуще-
ния, бегущий со скоростью Й(у). Однако разные стационарные ре-
шения (отмеченные цифрами 1 и 2 на рис. 3.106 и 3.13) в области 1
отличаются по характеру устойчивости к разным модам возмуще-
ния. Если первое стационарное решение на рис. 3.106 и 3.13 не-
устойчиво только к возмущениям типа сдвига, то второе ста-
ционарное решение неустойчиво уже к двум модам возмущений :
к возмущению типа сдвига gi(r) и к первой изгибной моде возму-
щения g2(r) (см. рис. 3.12). Ко всем другим модам изгибного
возмущения оба эти стационарных решения устойчивы. В этом слу-
73
Рис. 3.13. Неустойчивые стационарные решения (сплошные линии) на скач-
ке медленной переменной у (штрихпунктнрная линия). Решение 1 неустой-
чиво только к сдвиговой моде возмущения. Решение 2 неустойчиво к сдви-
говой н первой нзгибной модам возмущения (штриховые линии)
Рис. 3.14. Процесс деления остановившегося фронта (х - сплошная линия,
у - штриховые линии)
чае можно предположить, что второе стационарное решение пред-
ставляет собой определенную границу для изгибного возмущения,
наложенного на первое стационарное решение. Цели амплитуда
возмущения мала (штриховая линия между решениями 1 и 2 на
рис. 3.12), то возмущение исчезает и первое стационарное решение
не разрушается изгибной модой. Если амплитуда возмущения пре-
вышает разницу между вторым и первым стационарным решением,
то, нарастая, эта мода изгибного возмущения приведет к разруше-
нию стационарного решения. Исследование процессов разрушения
стационарного фронта было проведено в основном с помощью
численных расчетов [83, 197, 268]. Было показано, что происходит
процесс деления фронта. В результате роста возмущений, связан-
ных с быстрыми движениями, неподвижный фронт делится на три
новых фронта (рис. 3.14). Один из новых фронтов остается не-
подвижным на той же ступеньке медленной переменной, а два
других разбегаются в разные стороны: со скоростью К(у3) на
участке с у = у3, и со скоростью K(yi) на участке су =yi - Форми-
рование источника импульсов на основе этого процесса рассмотре-
но в гл. 5. Схема деления фронта на характеристике II изображает-
ся в виде трех волнистых стрелок (см. рис. 3.11а). Боковые стрел-
ки, обозначающие образование двух разбегающихся фронтов,
идут до линии у =yi. Скорости фронтов на этой линии определяют-
ся с помощью характеристики I. Центральная стрелка показывает,
что образующийся новый неподвижный фронт попадает в область 2,
соответствующую устойчивому фронту. Отметим, что на границе
области 1 (обозначенной на рис. 3.11а буквами гг'), складываются
наиболее благоприятные условия для развития процесса деления
74
фронта. На этой границе оба стационарных решения (см. решения 1
и 2 иа рис. 3.106) сливаются в одно стационарное решение, имею-
щее плато, которое неустойчиво к бесконечно малой изгибной
моде возмущения. ОднакЛ может ли система в результате медлен-
ных движений дойти до границы гг'? Дело в том, что нарастающие
сдвиговые возмущения могут увести фронт возбуждения от
ступеньки медленной переменной yi, уз, не позволив достигнуть
ей значений на границе гг'. Численные расчеты показывают, что
такой процесс возможен, т.е. возможны такие медленные изме-
нения yi и уз (и соответствующая им траектория в области /),
которые не вызывают сдвиговых возмущений на фронте возбуж-
дения. Естественно назвать такие траектории медленных движений
в области 1 ’’разделяющими”. Расчет таких траекторий пока не
проводился. Однако из (3.13) видно, что вид их определяется
нелинейной функцией Р(х, у), в то время как реальные медленные
движения определяются еще и функцией Q(x, у). Поэтому качест-
венный анализ возможен лишь на основе сопоставления медленных
движений изображающей точки относительно ’’разделяющих”
траекторий на характеристике II (см. рис. 3.11). Приведенное здесь
описание характеристики II основано на расчетах системы с а =
= DxlDy > 1. Тем не менее с ее помощью можно, по-видимому,
определить характерные особенности решений и в системах
са^ 1.
в) Нуль-изоклины для распределенной системы. Характеристи-
ка Ш представляет собой хорошо известные нуль-изоклины для
точечной системы (в уравнениях (3.12) Dx = 0, Dy =0). Однако
имеются и некоторые различия. В сосредоточенной системе пере-
ходы с одной устойчивой ветви на другую происходят лишь при
значениях утах илиу^. В распределенной системе такие перехо-
ды вызваны прохождением фронта возбуждения. Поэтому они мо-
гут существовать и при других значениях медленной переменной:
при ymjn < у < укр возможен переход с ветви 1 на ветвь 5; при
укр < У Хшах возможен переход с ветви 3 на ветвь 1 (см.
рис. 3.9в). Эти переходы показаны на рисунке стрелками. Кроме
того, для распределенных систем с а = DxIDy 1 по виду нуль-
изоклин можно судить о направлении происходящих в системе
медленных движений. В случае же а < 1 этого делать уже нельзя,
так как даже плавные неоднородности медленной переменной в
пространстве будут сильно влиять на ее изменения во времени.
Наглядный пример этому — контрастные диссипативные структуры
(см. § 7.4). Проекции плавных участков таких структур располо-
жены на устойчивых ветвях N-образной нуль-изоклины вдали от
точек равновесия однородной системы, но их положения во време-
ни вообще не меняются (см. также § 3.1 и 6.5).
75
3.6. Теоретико-групповой подход
Уравнения диффузионного типа без источников обладают широ-
ким набором пространственно-временных симметрий. Возникает
вопрос о классах симметрий при нелинейных источниках различ-
ных типов. Ответ на него дают теоретико-групповые исследования.
Ряд общих результатов уже получен [35, 66]. Поскольку техника
теории групп пока что находит ограниченное применение в теории
АВП, то мы не будем останавливаться на методических вопросах,
а лишь приведем некоторые результаты, следуя цитированным
выше работам.
Совокупность преобразований, оставляющих систему инвариант-
ной, называют группой, допускаемой системой. Теория Ли позво-
ляет существенно упростить изучение групп непрерывных преобра-
зований, сводя его к изучению так называемой алгебры Ли. Так,
для базовой модели при и = 2hF1 =F2,Du 3=D22 доказывается,
что соответствующая алгебра Ли имеет базис, состоящий из опера-
торов:
9
bt
9
9
br
9
+ 2r —,
bt
$4 ~Х1 —
OX J
9
9
br
b
$5 ~х2 ~ '
bx2
1 9
$6 = 2r 7---—— rxt
i
bt 4Di!
br
9
br
9%!
1
9
Эх2
, 9
(г2 +2ОЦ0Х!—----
1
--------rx2------ >
D22 bx2
(3.15)
1 2 9
- —— (r2 + 2Drrt)x2 -— •
4Djj bx2
При Du =D22 базис алгебры Ли увеличивается:
9 9
$8=JC2“ ’ Ь ~Х1 — •
иХ 1 ОХз
(3.16)
Подчеркнем, что этими преобразованиями полностью исчерпывает-
ся запас симметрий двух уравнений без источников. Также дока-
зано, что алгебра Ли с базисом (3.15), (3.16) образует самую
широкую группу, допускаемую базовой моделью в одномерном
пространстве, при любом выборе источников, т.е. для АВ-систем
запас симметрий всегда ниже.
При произвольном выборе источников размерность базиса рав-
на двум: остаются Ji и $2 — преобразования сдвига по времени
76
и пространству. Расширение размерности алгебры Ли до трех имеет
место в случаях [6б]Х а)чистых степеней (F^ = xlt F2 -х2),
б)перекрестных степеней = х2, F2 = xf), в)смешанных сте-
пеней (F\ = х^х2, F2 = Х1Х2), г)экспоненциальных и д)экспо-
ненциально-степенных источников. Возможные преобразования по-
добия порождают автомодельные решения, зависящие от отноше-
ния r/y/t. В случае плоских задач добавляются преобразования
поворотов. Сочетание преобразований поворотов и сдвигов при-
водит к решениям в виде спиральных волн — ревербераторов.
Теоретико-групповые методы позволяют получить интересные
результаты и в других областях теории АВ. Например, доказаны
теоремы о числе и расположении гомогенных предельных циклов
базовой модели при и = 2 и квадратичной нелинейности (Дани-
лов, 1982).
Особая ценность получаемых результатов в их математической
строгости и общности. Для этого подхода не требуется знания де-
талей структуры систем. Вместе с тем, зная одно из решений, мож-
но построить целое семейство решений, что затруднительно сделать
другими методами. По-видимому, в дальнейшем область приме-
нения этих методов в теории АВ будет расширяться [72].
3.7. Численный эксперимент
Численные методы занимают значительное место в исследовании
АВ-процессов. Это связано с тем, что для существенно нелинейных
и неконсервативных систем точные решения могут быть найдены
лишь для чрезвычайно упрощенных моделей. Некоторые примеры
таких расчетов можно найти в гл. 4 и 7. В остальных случаях прихо-
дится ограничиваться приближенными, качественными методами
исследования моделей. Правильность качественных результатов
обычно требует проверки с помощью ЭВМ.
В настоящее время численные методы представляют собой раз-
витую область прикладной математики. Их рассмотрение и даже
классификация выходят за рамки настоящей работы: по этим
вопросам существует обширная литература различных уровней
строгости и доступности. Здесь мы отметим только ряд особен-
ностей, на которые следует обратить внимание при проведении
численного эксперимента для АВ-систем. Под ’’численным экспе-
риментом” обычно подразумевают не всякое применение ЭВМ,
а только такой расчет решений исходных базовых моделей, кото-
рый направлен на подтверждение существования исследуемых
процессов и их особенностей. Конечно, имеются разнообразные
приложения численных методов и ЭВМ в задачах другого плана,
77
Рис. 3.15. а — Зависимость скорости БФот ’Хорога” а: непрерывная модель -
тонкая линия, дискретная модель (Np = 5) - толстая линия, б - График
функций F (х) н профиль стационарного перепада
например построение гомоклинических траекторий и зависимостей
параметров от коэффициентов моделей. Однако в них отсутствуют
элементы эксперимента; они не являются продолжением и допол-
нением качественного анализа динамической системы, а пред-
ставляют собой один из вспомогательных технических приемов
исследования.
Численный эксперимент проводится на дискретных по прост-
ранству моделях. Как уже отмечалось в § 3.4, для таких моделей
характерно наличие пороговых эффектов по числу элементов N.
Обычные для теории численных схем рекомендации заключаются
в увеличении N и сравнении двух решений по норме в некотором
функциональном пространстве. Такой подход является, можно
сказать, ’’квазилинейным” - он не учитывает пороговых явлений.
На рис. 3.15 показаны графики зависимости скорости волны от
параметра а в однокомпонентной модели с F(x) = кх(1 —х) (х-а).
Как известно (§ 3.4), точное значение скорости БФ при такой
функции F(x) определяется выражением V = (1 - 2a)y/nDj2.
Численный эксперимент дает зависимость иного типа: V = 0 для
интервала значений а (толстые линии), т.е. существует некоторый
аналог области ’’сухого трения”. В расчетах использовался обычный
трехточечный шаблон для аппроксимации второй производной:
Э2х/Эг2 - ’I{ = - 2 fXi-+ i+1xi), a N выбиралось
таким образом, чтобы крутая область фронта занимала не менее
пяти ячеек. Безусловно, при увеличении N область, аналогичная
’’сухому трению”, уменьшается, но в дискретных моделях эта
область не вырождается в точку. При условии N > 1 переход от
неподвижного перепада к режиму бегущей волны происходит
скачком, т.е. если при N' = 2N решение мало отличается от случая
с N' = N, то при №" = 2N+ 1 неподвижное решение в виде фронта
теряет устойчивость и возникает бегущая волна.
78
Как известно, в\однокомпонентных системах неоднородные
стационарные решений неустойчивы. В то же время в численном
эксперименте большой класс начальных условий может приводить
к устойчивым неоднородным стационарным решениям. Они
устойчивы как с позиций чиелейного счета, так и в параметри-
ческом смысле, т.е. малые изменения параметров модели
дают малые же изменения решений. Однако такие решения
не соответствуют решениям исходной распределенной систе-
мы и при достижении порогового значения N теряют устой-
чивость.
Подобные эффекты наблюдаются в многокомпонентных систе-
мах с Dxx ~е > 0 (х — автокаталитическая переменная). Так, ло-
кализованные структуры в определенной начальными условиями
области неограниченного пространства возможны в дискретной
модели при значениях N, меньших критического [51].
При больших N локализация нарушается. Заметим, что в распре-
деленной системе такие решения были бы возможны при строгом
выполнении условия Dxx = 0. Для непериодических стационарных
решений однородных моделей также наблюдаются пороговые
эффекты в численных экспериментах (см. § 6.1).
Для других типов АВП пороговые эффекты при квантовании
пространства также имеют место, однако их объяснение не всегда
столь же просто. Особое внимание следует обращать на системы,
в которых один из коэффициентов Dit много меньше остальных.
В них имеется несколько пространственных масштабов. В числен-
ном эксперименте наименьшему масштабу должно соответствовать
столько элементов, чтобы их изображающие точки в каждый мо-
мент времени перекрывали ’’все характерные” области фазового
пространства, т.е. численный эксперимент необходимо сочетать
с качественным анализом модели. Если удалось показать, что порог
по N превышен, то для проверки точности решений можно пользо-
ваться традиционными ’’квазилинейными” схемами экспери-
ментов.
В ’’машинном” эксперименте возникают также некоторые
проблемы, связанные с введением дискретного времени. Числен-
ные схемы делятся на две группы: явные и неявные. Явные схемы
довольно-таки просты алгоритмически:
'Xf(t + г) - Ч(г) = г('Х(0 +2>?М0). (3.17)
Однако требование устойчивости счета накладывает ограничение
сверху на шаг по времени
т <L2/(2 max{Dtt}N2). (3.18)
79
Неявные схемы не требуют таких ограничений но более сложны в
реализации:
'хДг + т) - ЪгДО = T^Fiit + т) + D{{ ’&{i(V+ т)). (3.19)
При этом приходится решать сложные системы итерационных урав-
нений для определения (t + т). Тем не менее для квазилинейных
и нелинейных параболических уравнений обычно рекомендуется
использовать неявные схемы [165], что объясняется меньшим
числом операций для достижения требуемой точности. Однако при
расчете АВП на величину т должны быть наложены дополнительные
ограничения, во многих случаях значительно более сильные, нежели
(3.18). Они определяются видом нелинейности и необходимы как
для явной, так и неявной схем. При этом становится рентабель-
ным применение явных схем расчетов.
Понять смысл дополнительных ограничений на г можно уже из
расчетов точечной системы. Действительно, для N = 1 явная схема
(иначе говоря, метод ломаных Эйлера) дает предельный цикл
больших размеров, чем истинный, а неявная схема — меньших.
Относительные погрешности примерно одинаковы. Приемлемая
точность может быть достигнута лишь при небольших значениях т.
Например, для уравнений Ван-дер-Поля, изучавшихся в связи с
проблемами синхронизации (см. § 7.2), оказалось, что при погреш-
ностях не более 10% необходимо т, в 20 — 40 раз меньшее, чем
требует (3.18) для N = 30. Поэтому была выбрана явная схема.
Отметим, что для релаксационных систем требования на т могут
быть значительно более жесткими и может оказаться рентабельным
интегрирование по явным схемам с использованием методов по-
вышения точности, применяемых для обыкновенных диффе-
ренциальных уравнений, например Рунга — Кутта, Адамса, Хэ-
минга.
Дискретные представления распределенной системы могут быть
дацы не только в виде разбиения пространства сеткой, но и в виде
разложений решений до другим базисным системам функций,
например гармонической. Если ограничить ряды конечным числом
членов, то можно получить систему обыкновенных уравнений,
численное интегрирование которой не вызывает математических
трудностей. Однако такой подход целесообразен только, если
допустимо ограничение количества членов, значительно меньшее,
чем N. Иначе, как правило, затраты машинного времени превы-
шают требуемые для сеточных дискретных моделей.
Помимо непосредственной дискретизации моделей используют-
ся и другие методы численного эксперимента, например сведение
базовой модели к интегральным или интегродифференциальным
уравнениям, для которых проблемы устойчивости численных схем
80
и их сходимости решается более просто. Однако такие методы тре-
буют большого объемЬ предмашинной работы, учета специфики
структуры конкретной модели.
Проведение численного Эксперимента с АВП на плоскости и в
объеме связано с многократным увеличением затрат машинного
времени, так что даже для моделирования простейших нелиней-
ных сред требуется применение мощных ЭВМ. Хорошие возмож-
ности обеспечиваются гибридными аналогово-цифровыми вы-
числительными системами; например, на такой системе детально
изучена циркуляция волн возбуждения на плоскости для широкого
класса нелинейностей [97]. Однако гибридные системы не полу-
чили широкого распространения в исследовательской практике.
Более перспективным представляется распространение много-
процессорных вычислительных систем.
В заключение еще раз подчеркнем, что существующая тенденция
к чрезмерному доверию машинным результатам пока что не может
быть оправдана. В численном эксперименте остается еще много
элементов искусства.
ГЛАВА 4
РАСПРОСТРАНЕНИЕ ФРОНТОВ И ИМПУЛЬСОВ
В этой главе рассмотрим модели, наиболее часто встречающиеся
в эксперименте автоволн в виде импульсов или фронтов возбужде-
ния (бегущих импульсов и бегущих фронтов).
(4.1)
4.1. Стационарный фронт возбуждения
Простейшее описание уединенного БФ возбуждения дается од-
ним уравнением (см. § 2.6):
Ьх Э2х
— = —t + F(x),
bt br2 V
где F(x) описывает скорость изменения х в сосредоточенной
системе и представляется обычно одной из двух кривых (рис. 4.1).
Такие зависимости получаются, в частности, из нелинейной функ-
ции F(x, у) в (2.53) при у = const. Граничным условиям на беско-
нечном отрезке соответствует равенство нулю bx/br при тех зна-
чениях xt = mt, при которых F(xt) = 0. Рассмотрим сначала ста-
ционарные решения (4.1). Введением автомодельной переменной
ri = r-Vt (4.2)
задача о скорости распространения фронта в (4.1) сводится к
следующей:
dW
W-----+ W + F(x) = 0,
dx
где W = dxldri. Скорость V находится из решения этого нелинейно-
го уравнения с краевыми условиями W(mi) = W(m3) = 0.
Существование искомых решений нагляднее всего показать на
фазовой плоскости W, х. Рассмотрим случай F = Fj (нелинейная
функция имеет только два нуля (кривая 1 на рис. 4.1). Ограничен-
ные решения, соответствующие физически реализуемым ситуа-
циям, имеются во всем интервале значений V: 0 <
При 0 < 7min ограниченными будут только решения в виде
колебаний около значения х = т1. Эти решения неустойчивы к
82
(4.3)
Рис. 4.1. Функции F (х) вуравненин
(4.1), соответствующие случаям бес-
порогового (7) и порогового (2, 3)
распространения БФ
Рис. 4.2. Решения уравнений (4.1)
и (4.3) для случая, когда нели-
нейная функция имеет только два
нуля (кривая 1 на рис. 4.1) и
возмущениям в рамках уравнения (4.1) (см. § 4.2) и, кроме того,
не удовлетворяют заданным нами граничным условиям. Зато в
случае, когда фокус иц превращается в узел, возможны решения
в виде фронта без осцилляций, которые удовлетворяют выбранным
краевым условиям. При этом, как видно из рис. 4.2, сепаратрисное
решение из седла в узел существует в интервале значений скорости
^min КС °°. Такая задача впервые была решена Колмогоровым,
Петровским и Пискуновым [114] еще в 1937 г. *). Для нелиней-
ной функции с монотонно меняющейся первой производной F^(x)
легко находится значение Kmin = Ко = Щр* (тп,). Оно соответству-
ет превращению особой точки типа ’’фокус” в точку типа ’’узел”.
Если монотонность нарушается, то первое решение из седла в узел
возможно лишь при Kmin > Ио. Наличие интервала скоростей свя-
зано с неустойчивостью однородного состояния х = Стационар-
ные решения из седла в узел уравнения (4.1) обладают наибольшей
устойчивостью. Они неустойчивы только к таким возмущениям,
которые переводят их от фронта с одной скоростью к фронту с
другой скоростью. К другим возмущениям они устойчивы.
В случае F = (нелинейная функция имеет три нуля) возмо-
жен целый набор ограниченных стационарных решений (4.1).
Единственным устойчивым решением является неосциллирующий
фронт, представленный сепаратрисой, идущей из седла в седло
[105] (рис. 4.3). Все другие стационарные решения неустойчивы.
*) Почти одновременно задача о БФ при горении была решена Зельдови-
чем и Франк-Каменецким [94]. Их исследования обобщены в [91,185]. Не-
зависимо задача о БФ была сформулирована Фишером [225].
аз
Рис. 4.3. Решение уравнений (4.1) и (4.3) для случая, когда нелинейная
функция имеет три нуля (кривая 2 на рис. 4.1); д - И = О, - К =
Рис. 4.4. Устойчивые стационарные решения уравнения (4.1) для случая,
когда нелинейная функция имеет пять нулей (слева графики F = F (х);
F, >V3 >FX)
Примеры нестационарных процессов с участием этих решений при-
ведены в § 4.2.
В общем случае решение задачи (4.3) на собственные значения
производится численными методами. Однако в некоторых случаях
удается получить и аналитическое решение. Для этого, например,
84
используется кусочно-линейная аппроксимация Рц(х). Если
Гп = -у(х - Wi)(x - т2)(х - т3), то, подставляя, как и в § 2.1,
W = о(х - тП1)(х - т3) в (4.3) и приравнивая коэффициенты при
одинаковых степенях х, получим
Vo = Vy/2(w1 + т2 -2т2), а = у/у/2. (4.4)
Представлением (4.4) часто пользуются при теоретических иссле-
дованиях [185,198, 230, 249, 250].
Отметим также еще один случай, когда функция F(x) имеет
пять или более нулей (рис. 4.4). Тогда в системе (4.1) могут воз-
буждаться несколько устойчивых БФ, различающихся своими
амплитудами. Возможны два варианта: а)БФ с малыми амплиту-
дами движутся так, что в результате сливаются (^ < К2) и об-
разуют БФ со скоростью V3 (V2 > V3 > V3); б)БФ с малыми
амплитудами расходятся (^ > V2). Используя приведенные дан-
ные, читателю нетрудно будет рассмотреть варианты движений
фронтов и для случая функции FUI(x), имеющей семьи более
нулей. С математическими проблемами существования БФ можно
ознакомиться по [52].
4.2. Пример процессов установления
Известно, что в сосредоточенной системе первого и второго по-
рядков анализ положения точек равновесия и особенностей пове-
дения малых возмущений вблизи этих точек позволяет провести
качественное описание всех возможных движений. Весьма заман-
чивым представляется построение аналогичной процедуры для ка-
чественного описания решений и в распределенных системах. Рас-
смотрим возможность такого подхода на примере уравнения (4.1),
в котором F(x) = — ух(х - т3)(х - т2) [258]. Решения будем
рассматривать на отрезке —L <г <£, на границах которого пола-
гаем выполненными условия bx/br | г _ ±£ = 0.
Естественно предположить, что в распределенной системе ста-
ционарные решения получаются из (4.1) (при условии bx/bt = 0) и
являются аналогом точек равновесия в сосредоточенной системе.
Особая роль стационарных решений неоднократно отмечалась при
исследовании нелинейных волновых процессов [58, 156].
Следующий этап — определение устойчивости стационарных ре-
шений. В распределенной системе малые возмущения около ста-
ционарных решений представлены, в отличие от сосредоточенной
системы, в виде набора пространственных мод. Поэтому при анали-
зе устойчивости необходимо проследить ’’судьбу” каждой прост-
ранственной моды. Покажем существование определенной законо-
мерности между числом возможных стационарных решений и
85
Рис. 4.5. Зависимость инкрементов от номера моды возмущения для трех
стационарных решений х 0 = т2 = 0, х = х2(г) и х = х, (г) (вид этих решений
показан справа)
характером их устойчивости к пространственным модам возму-
щения.
На фазовой плоскости W,x ограниченные стационарные решения
уравнения (4.1) представлены замкнутыми фазовыми траектория-
ми, заключенными внутри сепаратрисы (см. рис. 4.3а). Видно, что
граничным условиям удовлетворяют не только решения, ограни-
ченные сепаратрисой, но также и точки равновесия Wi и т3. Как
будет показано ниже, число решений зависит от длины отрезка 2L.
Обозначим через к( = iril(2L) волновое число моды возмущения
(индекс i означает число нулей для данной моды на отрезке 2L),
Чу — инкремент неустойчивости для моды возмущения, имеющей
i нулей на отрезке 2L и наложенной на стационарную волну, имею-
щую / нулей.
Однородные стационарные решения х = т^, х = т3 всегда
устойчивы для произвольных бесконечно малых возмущений. Ус-
тойчивость центрального однородного решения х = тг =0 зависит
от инкремента 7/0 = —к? + F*(0). Рассмотрим теперь отрезки
различной длины:
а) 0 < 2L < ^/Fx(0). В системе реализуются только однородные
стационарные решения. Решение х = т2 =0 неустойчиво только к
сдвиговым возмущениям (70оо = F*(0) > 0). Все возмущения с
волновым числом Kt (i > 0) будут затухать.
86
6) irlF'x(Q) < L < 2л/Г*(0). В системе, кроме однородных, по-
является еще одно стационарное решение. Оно имеет одно пересе-
чение прямой х = т2. Это решение неустойчиво к сдвиговым
возмущениям (yOi > 1), но устойчиво ко всем другим модам
возмущения (у/ j <0, i > 0). При этом однородное решение т2
неустойчиво уже к двум возмущениям: однородному (70оо > 0)
и к возмущению с одной точкой пересечения нулевого значения
т2 = 0. Для всех других мод возмущения решение х = т2 устойчи-
во (yia> <0, i> 1).
в) 2?r/Fi(0) < 2Л < 3irlFx(6) В такой системе могут существо-
вать одно однородное и два неоднородных стационарных решения
(рис. 4.5). Их устойчивость характеризуется соответствующими
инкрементами, показанными на этом же рисунке.
Из приведенных примеров видно, что неоднородные стационар-
ные решения устойчивы к таким модам возмущения, которые
имеют равное или большее число нулей, чем у исследуемого стацио-
Рис. 4.6. Переходный процесс при начальном возмущении хв(г) =
= 0,005 cos + 2sinприводящий к стационарным, но неустой-
чивым решениям с меньшим числом нулей
87
нариого решения, и неустойчивы к возмущениям с меньшим
числом нулей.
Следующий этап качественного анализа включает в себя пред-
сказание, в какое пространственное распределение перейдут на-
растающие моды возмущения. При рассмотрении схем неустойчи-
вости естественно возникает предположение, что мода возмущения
с i нулями перейдет в соответствующее стационарное решение с
таким же числом нулей. Проверка этого предположения проводи-
лась с помощью численных расчетов. Начальное условие задава-
лось в виде
[/ йт \ / ЙТ \1
A cos I--г I + В sin (-г 1 I .
X2L / \ 2L /]
Изменяя начальные амплитуды разных мод возмущения, уда-
лось проследить эволюцию решения как от однородного решения
х = т2 -0 до стационарного неоднородного с тем же числом нулей,
так и переходы от одного неоднородного решения к другому
(рис. 4.6). Отметим, что при расчетах необходимо было подбирать
соотношение между амплитудами различных мод, так как инкре-
менты неустойчивости всегда больше у тех мод возмущения, кото-
рые имеют меньше нулей. Приведенные результаты численных
расчётов подтверждают предположение о переходе элементарного
возмущения в соответствующее ему стационарное решение с тем
же числом нулей. Однако имеются и отклонения от предполо-
женной здесь простой схемы. Они связаны с ошибками ЭВМ,
возникающими при исследовании неустойчивых структур.
4.3. Пульсации скорости фронта
Рассмотрим модели двух интересных явлений, связанных с пуль-
сациями скорости БФ: а)автоколебательное горение, б) спиновые
волны горения.
а)В ряде случаев БФ описывается двумя уравнениями (2.50)
[5,139]:
ЭТ Э2Т
— =Z>i — +и), (4.5)
Эт дг
дп д2п
(4.6)
В основном это процессы распространения тепловых волн в
химических системах (см. § 2.5).
Если Di = D2, то система (4.5)—(4.6) может быть проинтегри-
рована (Н = уТ + п = const) и сводится к одному уравнению, ко-
88
Рис. 4.7. Диаграмма устойчивости плос-
кого БФ к малым возмущениям
скорости его распространения [3 ]
то рое исследовалось в § 4.1. Однако весьма интересным представ-
ляется исследование движений БФ при изменении £ = О1/Ог
(£ — число Льюиса). Наиболее подробно такие решения исследова-
лись в связи с устойчивостью скорости распространения тепловых
волн в теории горения [91].
Анализ показал, что устойчивость стационарного распростране-
ния волн возбуждения определяется двумя безразмерными пара-
метрами: £ и температурой в ’’холодной” среде ©0. Если Q =
= (nAr0/c)exp[-E/(RT)], где Е — энергия активации, с — удельная
теплоемкость, к0 — предэкспоненциальный фактор, R — универ-
сальная газовая постоянная, то значение ©0 - Ey[Rc(T0 +у/е)2].
Наиболее полно роль £ и ©0 исследована в [3]. На рис. 4.7 приведе-
на диаграмма, показывающая, что стационарное распространение
фронта устойчиво при £ = 1 и малых значениях ©0. Более полное
исследование БФ проводилось численными методами. Так, в [193]
для случая £ 0 было показано, что неустойчивость при ©0 >
> ®о кр проявляется в виде пульсаций мгновенной скорости БФ
относительно стационарного значения. Вид таких пульсаций приве-
ден на рис. 4.8, на котором изображено распределение относитель-
ной мгновенной скорости в пространстве при разных значениях
параметра ©0. Вблизи границы устойчивости колебания носят
гармонический характер, вдали — релаксационный. В последнем
случае процесс состоит из чередующихся резких увеличений и
уменьшений скорости распространения фронта. При этом сильно
меняется во времени и пространстве профиль переменных Тип.
При дальнейшем удалении от границы неустойчивости структура
пульсаций приобретает все более сложный вид. По-видимому,
усложнение пульсаций может привести к хаотическим движениям
фронта. Однако расчет сложных пульсаций связан с большими вы-
числительными трудностями [5]. Пульсационное распространение
фрЪнта горения получило название автоколебательного горения.
б) В двумерной среде имеются также неустойчивости плоского
распространения фронта, получившие название спинового горения.
Заключается оно в том, что имеется локализованный очаг повы-
шенной температуры горения, который движется вдоль фронта
89
1 2 r[rp
Рис. 4.8. Пульсация скорости БФ при различных удалениях от границы
неустойчивости (гр - пространственный период пульсации) [193]
горения. Из-за распространения всего фронта в цилиндрическом
образце такой очаг перемещается по боковой поверхности образца
по спирали (см. рис. 1.4).
В [101] была показана возможность единого описания этих яв-
лений. Рассматривалась следующая двумерная система безразмер-
ных уравнений горения:
30 Э2© 320
= — — + v - — - а(0 - 0Н) + (1 - т?)ехр [0/(1 + 00)]. (4.7)
ot Ъг fyr
Зт;
— = 7(1 - Т1)ехр [0/(1 + 00)], (4.8)
01
для области решений г > 0, 0 <1, t>0. Задавалось также ус-
ловие периодичности в виде 0(r, t) = 0(г, + 1, t), f) =
= ц(г, ч> + 1, t) и условие на торце 0(0, <р, t) = 0Н + у-1 при на-
чальных условиях 0(r, <f>, 0) = 0о(г, У>), ч(г, 0) = ПоО’, У5)-
Переменные 0 и т? показывают изменение безразмерной темпера-
90
Рис. 4.9. Положения БФ горения в двумерном пространстве в различные
моменты времени. Параметры: 7 = 0,08; 0 = 0,08; 0Н =-9,5; а = 6-10"4;
а - v = I 10'2, одномерный автоколебательный режим; б - v = 5 • 10'4,
спиновое горение с одним очагом реакции; в - v = 2 10~4, спиновое горе-
ние с двумя очагами реакции; г - автоколебания мгновенной скорости
горения в одномерном режиме [101 ]
50 100 150
Рис. 4.10. Установившееся попе температур горения с двумя очагами реак-
ции в плоском образце [4]
91
туры и глубины превращения. Система (4.7)-(4.8) описывает
горение цилиндрического образца при торцевом зажигании. Пред-
полагается, что в радиальном направлении распространения & нет.
Параметр 7 определяет предел устойчивости и хорошо известен в
теории горения; v — параметр, появившийся из-за двумерной
постановки задачи и обратно пропорциональный квадрату диа-
метра образца. Результаты расчета на ЭВМ приведены на рис. 4.9 и
4.10. На рис. 4.9 в координатах г и приведены линии постоянной
глубины превращения (переменная г?) в различные моменты вре-
мени. Эти кривые отражают положение фронта в двумерном прост-
ранстве. Все линии БФ расположены периодически, что говорит об
установившихся режимах горения. Показано существование трех
режимов горения. На рис. 4.9а вертикальные прямые линии указы-
вают на одномерный автоколебательный режим. На рис. 4.96, в
изображено спиновое горение с одним очагом реакции и с двумя
очагами. На рис. 4.9г дана зависимость мгновенной скорости горе-
ния от координаты г. На рис. 4.10 представлено двумерное поле
температур при двухочаговом спиновом горении; ’’бугры” на
поле — это очаги реакции, которые движутся поперек распростра-
нения основной волны.
Возможность существования новых режимов спинового горения
следует из теоретического рассмотрения, описывающего малые от-
клонения от стационарной плоской волны [S3]. Такое рассмотре-
ние позволило с единых позиции найти условия возникновения
как автоколебательных, так и спиновых режимов. Кроме того,
были обнаружены режимы, названные предельными. В самом
простом случае очаг горения, движущийся сначала по оси цилиндра,
выходит на поверхность и распространяется вдоль образца в виде
горящей окружности, затем возвращается внутрь образца, далее
процесс повторяется. Этот режим наблюдается в эксперименте.
В более сложных случаях (при достаточно больших радиусах)
внутри образца могут распространяться фронты в виде окруж-
ностей, симметричных относительно оси цилиндра, сменяющих
друг друга.
Таким образом, АВ-структура в виде уединенного БФ имеет
достаточно разнообразные режимы. В случае стационарного рас-
пространения бегущему фронту соответствует математический
образ — сепаратриса, идущая из седла в седло (триггерная волна)
или в узел (фазовая волна). Для режимов нестационарного
распространения элементарных математических образов пока еще
не создано. Имеется лишь перечень характерных режимов: одно-
мерные пульсации фронта, спиновый режим, предельные режимы
(см., например, [53]).
92
4.4. Формирование бегущего импульса
Второй базисной структурой является БИ возбуждения. Анали-
зировать поведение БИ можно на основе движения двух сшитых
плавным плато фронтов, которые образуют локализованную струк-
туру с автономным поведением. В настоящее время описание
стационарных БИ хорошо отработано [150, 173, 208].
С помощью автомодельной переменной получают систему обык-
новенных уравнений. В фазовом пространстве этой системы имеют-
ся гомоклинические траектории (траектории, идущие из седла в
седло). Этим траекториям, как и в случае БФ, соответствуют опре-
деленные скорости БИ. Поэтому рассмотрим сразу процесс форми-
рования устойчивого стационарного БИ. Он достаточно просто
прослеживается для систем с сильнорелаксационными свойствами
[146]. Для качественного анализа достаточно знать нуль-изоклины
системы и зависимость скорости распространения уединенного
фронта от медленной переменной в области нахождения фронта
(см. §3.5).
Анализ процесса формирования БИ в системе, каждая точка
которой представляет собой ’’ждущий автогенератор”, основан на
использовании малого параметра е в уравнениях (2.53), (3.12).
При этом возможно разделение движений на ’’быстрые” и ’’медлен-
ные”, как это обычно делается для сосредоточенных релаксацион-
ных колебательных систем. На быстром этапе, происходящем за
время порядка е, функция у не успевает измениться, и из (2.53)
имеем
дх д2х
~ = Dx -тт + Р(х> у sy° (4-В 9)
of or
где f = tie — ’’быстрое” время. Для медленных процессов, отбрасы-
вая в (3.12) член е bx/bt, получим систему
Э2х
^-ТЗ-+Л^.7) = 0, (4.10)
ог
Эу Э2у
=Dy~- + Q(x,y). (4.11)
bt or
В дальнейшем для конкретности зададим вид функций Р и Q
следующим образом: Р - - у +f(x), Q = - у - ух, где у — постоян-
ная, а/(х) имеет N-образный вид (рис. 4.11). Такая аппроксима-
ция достаточна для описания основных особенностей АВП и позво-
ляет получить решение в аналитической форме. Предположим, что
уравнения равновесия ух = -у и f(x) = у имеют лишь одно реше-
ние Хр,ур, отвечающее устойчивому состоянию.
93
Г(х) =
Рис. 4.11. Кусочно-линейная аппроксимация функции f (х):
-ах
а2х - (а, + a2)xs
— а3х — (а, + а2 ) х5 + (а2 + а3) х3
при х <х5,
при х5 < х < х3,
при х3 < X
Обсудим сначала быстрые во времени процессы, описываемые
нелинейным уравнением (4.9). Его решения при у = const уже
рассматривались в § 4.1 и 4.2. При заданном у = уо имеется три
состояния равновесия, определяемые нулями функции Р(х, у о).
Устойчивым*) состояниям отвечают точки на ветвях 1 и 3 (см.
рис. 4.11). Особую роль среди решений (4.9) играют стационар-
ные БФ, определяемые уравнением
Э2х0 <Ьс0
Dx~TT^V— -Уо+/(^о) = 0, (4.12)
ОТ? дг}
которое следует из (4.9) и при переходе к автомодельной перемен-
ной 71 = г — Vt приводит к уже изученной задаче о движении БФ
(§ 4.1). В результате получается зависимость К(у0), представлен-
ная на рис. 4.12. Эти расчеты были проведены для кусочно-линей-
ной аппроксимации функции/(х), показанной на рис. 4.11 штрихо-
вой линией.
Рассмотрим теперь процесс эволюции БИ в ждущей релаксацион-
ной среде, используя разделение движений на быстрые и медлен-
ные. Зададим достаточно гладкое начальное возмущение функции
х=х(г, 0), характерный размер которого значительно превышает
диффузионный масштаб Lm$=\/DXT. В начальный момент для
простоты положим значение у постоянным и равным равновесному
*) Здесь имеется в виду только устой<мвость по отношению к быстрым
движениям.
94
значению ур < укр (см. § 3.5). В соответствии со сказанным выше
процесс эволюции БИ может быть разделен на следующие этапы
(рис. 4.13):
а) Начальный профиль возмущения (штриховая линия на
рис. 4.13а) быстро (за время Д? ~ е) изменяется и принимает
почти прямоугольную форму. Края образовавшегося импульса
ранственное распределение х; штрихпунктирная - пространственное рас-
пределение у. а - г - Слева показано положение БИ в разные моменты
времени; справа приведены характеристики БИ в конфигурационном прост-
ранстве V, у (точки на зависимости V (у) соответствуют быстрому фронту;
штриховая пиния - значениям у, соответствующим движущемуся со ско-
ростью V фронту)
95
формируются в стационарные перепады и распространяются в раз-
ные стороны. Распад начального возмущения происходит симмет-
рично, поэтому достаточно проследить за эволюцией импульса в
одном направлении.
б) Край импульса движется с постоянной скоростью К(ур). Вер-
шина БИ формируется медленным движением независимо в каж-
дой точке. Изменение х в медленной фазе дается формулой
т= г
х, -7х-/(х)
= т(х2,х).
(4.13)
в) Когда значения х и у достигают хт8Х и ут8х, происходит
срыв в состояние рефрактерности, и появляется новый быстрый
стационарный перепад — спад импульса (см. рис. 4.13). Он начи-
нает двигаться со скоростью К(утах) в ту же сторону, что и пер-
вый перепад, и вместе с ним образуется БИ. Начальная длина обра-
зовавшегося импульса в пространстве равна /иач = V(yv)r(x2,x2).
Дальнейшая эволюция БИ зависит от вида функции f(x).
При относительно симметричной функции/(х) всегда И(утах)>
> ^(Ур) и спад импульса перемещается в область с у <Утах» где
его скорость однозначна. Длина БИ монотонно сокращается. При
этом скорость спада уменьшается и в пределе становится равной
скорости переднего БФ. Это возможно при некоторому =У»>укр
(см. рис. 4.11). В результате БИ принимает стационарную форму,
асимптотически сжимаясь до длины /Ст= ^СУр)т(*2,*.), где
х, находится из условия f(xt)=y, (ветвь 3 на рис. 4.11). Время
сжатия то можно оценить из формулы
т0»2т(х„х3)/[Г(у1пах)/К(ур)- 1]. (4.14)
Если использовать кусочно-линейную аппроксимацию /(х), соот-
ветствующую параметрам,«1 = I, а2 =4, а3 = 10, х4 =4, х5 = 2 и
7 = 4 (кривая 1 на рис. 4.12), то нетрудно получить следующие ха-
рактеристики импульса: /нач = 0,172/е, /ст = 0,0372/е, то=0,2.
Скорость фронта и установившаяся скорость спада импульса
равны: Г(ур)= К(у.) (см.рис. 4.12).
При существенно несимметричной функции/(х) формирование
спада БИ может происходить при значениях у, соответствующих
вертикальным участкам графика К(у) (см. рис. 3.9а). В этом
случае формирование стационарного БИ полностью завершается
в момент образования его спада.
г) После прохождения БИ образуется зона рефрактерности, где
точки среды медленно возвращаются в состояние равновесия
(рис. 4.13г).
Процесс формирования БИ в конфигурационном пространстве
К у показан в правой части рис. 4.13. Точки на зависимости V(y)
96
соответствуют фронту и спаду импульса, а штриховая линия —
изменению переменной у. Нетрудно сопоставить пространственные
распределения x(r, t), y(r,-t) и их образы в пространстве V, у.
Итак, обсужденный пример показывает, как нестационарный
процесс может приводить к формированию стационарного БИ;
в одном случае это происходит асимптотически, в другом импульс
становится стационарным сразу же после образования резкого
спада. Описанная картина формирования импульса реализуется при
Ур <3'кр-Если Д'р>^кр> а начальное возмущение снова соответ-
ствует х(г, 0), то на этапе а) снова образуется прямоугольный
импульс, однако его края теперь движутся по направлению к се-
редине. Возмущение ’’схлопывается” и исчезает за конечное время.
Заметим, что изменение вида функций Р(х, у), Q (х, у) или даже
увеличение числа уравнений для медленно меняющихся перемен-
ных мало сказываются на качественных особенностях процессов
до тех пор, пока не изменятся, например, число и характер со-
стояний равновесия ’’быстрых” уравнений при у = const. Это
обстоятельство представляется существенным в связи с тем, что
сами исходные уравнения типа (2.53) и (3.12) обычно основывают-
ся на более или менее грубых аппроксимациях, и основной интерес
на данном этапе представляет изучение качественного хода про-
цесса.
Специального обсуждения заслуживает вопрос о возможности
существования периодических процессов автоколебательного типа.
Из сказанного легко заключить, что при любом импульсном возму-
щении сунач =£укр система возвращается в равновесное состояние.
Ситуация может измениться только в случае, когда унач = укр
или когда начальное распределение Унач(г) неоднородно и в неко-
торых точках проходит через укр. Возможно образование непод-
вижного перепада, не описываемого ’’быстрым” уравнением (4.14).
Этот перепад может быть неустойчивым в фазе медленных движе-
ний (4.10), (4.11), и в принципе могут возникнуть периодические
волны, расходящиеся из области, где у =укр (см. §5.1).
Итак, на рис. 4.13 представлен наиболее простой из нестационар-
ных процессов - формирование БИ. Этот процесс изображен в
виде серии картинок х (г, t) и у (г, t) в различные моменты време-
ни и наиболее точно отображает представление решения исходных
уравнений. Однако его можно несколько упростить, если отказать-
ся от тонкостей изображения небольших изменений переменных в
областях возбуждения покоя. Для переменной х изобразим
область возбужденного состояния штриховкой на фоне невозбуж-
денного состояния (рис. 4.14а). Для переменной у область, где
у >укр, отметим точками, а область су <укр оставим свободной.
Смысл последнего разделения областей заключается в качествен-
97
ном различии поведения БФ в заштрихованной и незашгрихованной
областях: направления скорости распространения фронта в этих
областях будут противоположными.
При описании этого решения достаточно использовать две харак-
теристики I и III (см. рис. 3.19). Образом БФ на характеристике III
является линия, соответствующая переходу между устойчивыми
ветвями 1 и 3 на нуль-изоклине Р(х, у) = 0. На характеристике I
’’образ” фронта. — точка, соответствующая значению ур (см.
рис. 4.13). ’’Образ” БИ представляет собой замкнутую траекторию
на характеристике III из двух фронтов — переходов и двух участ-
ков медленных движений (рис. 4.146).
Отметим одно из ограничений применения качественного мето-
да: с его помощью нельзя описать процесс исчезновения очень
Рис. 4.14. Формирование БИ: схема решения на плоскости г, t .(а), матема-
тический образ БИ в фазовом пространстве (б), математический образ БИ
в конфигурационном пространстве (в)
короткого импульса. Из теории, описывающей стационарный БИ
в АВ-среде (§ 4.3), известно, что при малых скоростях распростра-
нения (V < Ve) существование стационарного БИ невозможно.
Однако при рассмотрении с помощью характеристик I и III такого
ограничения не возникает. Связано это с тем, что характеристика I
получена для изолированного фронта возбуждения. Если же в про-
цессе распространения фронты сближаются достаточно близко*)
(а это происходит именно при малых скоростях распространения),
то взаимодействие между фронтами становится сильным и исход-
ные предположения уже не могут быть справедливыми. Для качест-
венного описания этой ситуации необходимо ввести дополнитель-
ное условие: если в процессе распространения длина импульса ста-
нет меньше предельной (/пр * 3/фр), то такой импульс следует
считать исчезнувшим, причем в момент исчезновения медленную
переменную приближенно можно считать равной укр (истинное
значение у отличается от укр лишь на величину Такое
*) ’’Близко” означает расстояние между фронтами порядка или меньше
длины фронта возбуждения.
98
Рис. 4.15. БИ при параметрах системы, соответствующих декрементному
распространению: математический образ изменяющегося импульса в фазо-
вом пространстве (а), схема решения на плоскости г, t (б)
дополнительное условие позволяет описывать режим декремент-
ного поведения (рис. 4.15), а также режим трансформации ритма.
Качественный подход к исследованию процесса формирования
БИ легко применяется к задачам о распространении последователь-
ностей импульсов. Заинтересованный читатель может самостоятель-
но рассмотреть задачи о выравнивании интервалов между БИ,
определении скоростт периодической последовательности БИ
[173], выпадении части импульсов при превышении частоты стиму-
ляции максимально допустимой [184].
Хотя выше рассмотрена одномерная модель, все сказанное не-
посредственно относится и к двумерному процессу, если радиус
начального возмущения много больше длины стационарных пере-
падов. При этом рис. 4.13 будет иллюстрировать образование
расходящегося кольцевого импульса конечной длины, возникаю-
щего из симметричного начального возмущения.
4.S. Распространение импульсов в среде
с плавными неоднородностями
Известно, что неоднородности среды, изменяющие рефрактер-
ность или длительность импульса, могут приводить к трансформа-
ции ритма следующих друг за другом БИ. Такой процесс можно
рассматривать, например, с помощью аксиоматических моделей
возбуждаемых сред. Однако изменение длительности БИ и периода
их следования более естественно находить из базовой модели (2.53).
Здесь с помощью упрощенного анализа таких уравнений будут
рассмотрены перестройки в серии БИ при их прохождении через
плавную неоднородность среды.
99
Воспользуемся базовой моделью в виде двух уравнений с учетом
неоднородности среды:
Эх Э2х Эу
еТ"=ТТ+р<х’>')’ = (4-15)
ot br bt
Масштабы t и г выбраны таким образом, чтобы коэффициенты
при производных равнялись единице. Так как мы рассматриваем
не тонкие детали в форме БИ, а лишь местоположение его фронтов
с течением времени, то воспользуемся приближенным методом ана-
лиза, описанным в предыдущем параграфе. Тогда для определения
местоположения л-го БФ следует решить систему
Эг„
— =V[yn(r,t)l, (4.16)
ot
где yn(r, t) — значение медленной переменной перед этим фронтом.
Метод нахождения V(y) из формулы (4.16) описан в § 4.4 и спра-
ведлив, если характерный масштаб неоднородности много больше
длительности БФ. Изменение медленной переменной перед фрон-
том или перед спадом находится соответственно из уравнений
=Q [уп,фр, xi (Уя.фрХН =Qi (уп,фР> г), (4.17)
at
~-с— = Q \уП' сп, х3 (уи> сп), г] = Q3 (у„_ сп, г), (4.18)
dt
где Xj >3(у) - устойчивые ветви N-образной нуль-изоклины. Объе-
диняя формулу (4.16) с (4.17), а затем формулу (4.16) с (4.18),
получим уравнения для фронта л-го импульса:
^и.фр 1 Хп.фр dri
T/z., X ’ f n . Г фр ~ fn-1 ,сп>
dr г(Уп,фр) Уп— 1, сп Q\ (г, 7?)
(4.19)
для спада я-го импульса:
dtn, сп = 1 Уусп dr]
dr У(Уп,сп) ’ з'п.Фр 2з(г, т?)
Начальные условия в точке г = г0 представляют собой времена
возбуждения фронта и спада п-го импульса. Движение п импуль-
сов можно проследить, решая систему из 4и (в простых случа-
ях 2и) обыкновенных дифференциальных уравнений.
В качестве примера нами был проведен анализ распространения
БИ в возбудимой ткани с периодически меняющейся длитель-
ностью импульса т в разных точках пространства. Результаты при-
100
Рис. 4.16. Распространение БИ через плавни
неоднородную среду при периодическом
изменении т(т): Т - период следования БИ
ведены на рис. 4.16. Видно, что неодно-
родность приводит к уменьшению ско-
рости распространения фронтов. Этот
эффект отмечался, например, в рабо-
тах [13, 121, 189], проведенных с акси-
оматическими моделями. Представлен-
ные здесь расчеты позволяют лишь
количественно определить торможение.
Эти расчеты дают новую информацию
о движении ’’сгустка” замедлившихся
фронтов (на рис. 4.16 края ’’сгустка”
отмечены штриховыми линиями). Осо-
бенности, связанные с движением тако-
го ’’сгустка”, состоят в следующем. Во-
первых, скорость распространения ’’сгу-
стка” задается минимальной скоростью
заторможенных в ней БФ. Во-вторых,
в области, где уже прошел ’’сгусток”,
и сглаживается. Поэ-
неоднородность ткани как бы усредняется
тому распространяющиеся по ней БИ лишь незначительно меняют
свою длительность. Указанные особенности в прохождении им-
пульсов могут быть, по-видимому, использованы для диагностики
величины и местоположения неоднородности в нервных волокнах
и других возбудимых тканях.
4.6. Импульсы в среде с немонотонной зависимостью И= И(у)
Более разнообразные динамические процессы могут быть полу-
чены в АВ-системах с такой функцией Р(х, у), которой соответст-
вует немонотонная зависимость И= К(у). На рис. 4.17 приведены
характерные зависимости И(у). Кроме того, немонотонность в за-
висимости скорости от медленной переменной получается в систе-
мах, в которых коэффициент диффузии автокаталитической пере-
менной при увеличении у убывает. Такой механизм немонотоннос-
ти может проявить себя, например, в мышечных клетках сердца.
Он связан с ухудшением электрической связи между клетками при
повышении концентрации ионов Са2+ внутри клетки.
Основное отличие систем с характеристиками, показанными на
рис. 4.17, от рассмотренных ранее, заключается в существовании
в них двух устойчивых и одного неустойчивого импульсов. Скорос-
101
Рис. 4.17. Различные виды немонотонных
характеристик V (у) с одним (а) и
тремя (б) пересечениями нупя
Рис. 4.18. Распространение БИ в среде
с немонотонной зависимостью И = И (у):
формирование БИ разной длительности
в зависимости от продолжительности
начального возмущения; немонотонная
характеристика имеет одно пересечение
нуля (а), случай, когда V - V(y} имеет
три нуля (б). Показано также формиро-
вание начальных возмущений в соот-
ветствующий БИ. Стационарные БИ
в системе с немонотонной зависимостью
К=И(у):7' и5- устойчивые к возму-
щениям БИ, 2 - неустойчивый БИ (в)
102
ти распространения всех импульсов одинаковы и равны К(ур), но
длины I импульсов различны (рис. 4.18в). В первом стационарном
БИ медленная переменная меняется от ур доуР],во втором —от ур
до уРз, в третьем — отурдоуРз (рис. 4.18в). С помощью зависи-
мости V(y) нетрудно проверить устойчивость длительности этих
импульсов. Два стационарных БИ (с длинами It и /3) устойчивы
к изменениям длины. Импульс с промежуточной длиной неустой-
чив к сдвигам своего спада. Он определяет ’’ориентировочную” гра-
ницу для начальных условий, которая разделяет начальные возму-
щения, приводящие к формированию устойчивых стационар-
ных БИ. Формирование БИ показано на рис. 4.18а, б. Длительнос-
ти устойчивых БИ показаны сплошными линиями, неустойчи-
вых БИ — штриховыми.
В случае, когда И(у) обращается в нуль при трех значениях
укр. 0 = 1,2, 3) (рис. 4.176), в процессе формирования импульса
могут образовываться остановившиеся фронты возбуждения.
Это происходит в том случае, когда в месте спада импульса медлен-
ная переменная попадает либо в интервал Ду, либо в интервал
Укр, < У < Укрз • При этом скорость спада всегда меньше скорости
фронта. Он отстает, а значение в месте спада возрастает, что приво-
дит к дальнейшему уменьшению скорости. Пример процесса оста-
новки спада БИ показан на рис. 4.186. Более подробный разбор
процессов формирования БИ в системах с немонотонной V = V(y)
приведен в работах [199, 200].
В заключение параграфа отметим, что для реальных возбуди-
мых объектов, таких, например, как автоколебательные химичес-
кие реакции и волокна сердечных мышц, непосредственное измере-
ние нелинейных характеристик встречается со значительными труд-
ностями, и о них часто судят по отклику системы на внешнее воз-
мущение. При этом, когда отклик становится сложным, поведение
системы иногда пытаются объяснить с помощью усложнения исход-
ной модели, в частности, увеличивая число переменных. Нам пред-
ставляется интересным показать, как при качественном изучении
простых моделей среды выявляются новые типы поведения. Для
этого необходимо только подобрать специальный вид качественной
характеристики системы V= И(у). Эта зависимость по сути дела
есть результат редукции к системе из двух уравнений системы бо-
лее высокого порядка.
4.7. Импульсы в триггерной системе
Рассмотрим триггерную систему при различных качественных
характеристиках: III — нуль-изоклины, I - зависимости V(y) (см.
рис. 3.19 и 4.19) . Исходные начальные условия выберем в состоя-
нии покоя уР1, xPi, соответствующем первой устойчивой точке
103
Рис. 4.19. Формирование БИ в триггерной системе. Слева - нуль-изоклнны
системы и образы решений в конфигурационном пространстве. Справа -
схемы решений: формирование стационарных БИ в невозбужденной облас-
ти (в), формирование стационарных БИ в возбужденной области (б)
системы. Вторая устойчивая точка (уРз, *Рз) соответствует состоя-
нию активности системы. Импульсное возмущение формируется в
результате последовательного стимулирования переходов из сос-
тояния покоя в состояние активности и обратно; Такие переходы
могут быть вызваны только соответствующими стимулами конеч-
ной амплитуды. Момент включения стимулов на рис. 4.19 показан
стрелками. Возможны различные варианты импульсных возму-
щений.
Если ] И(ур )| < I И(уРз)то формируется стационарный БИ
(как показано на рис. 4.19а), причем фронт импульса распростра-
няется с постоянной скоростью K(yPi). Поскольку БФ, переводя-
щий систему из активного состояния в состояние покоя, движется
быстрее первого фронта, то через некоторое время он догоняет его
и формирует спад БИ. Сформировавшийся импульс распространя-
ется далее, сохраняя свою форму и амплитуду. Импульсное воз-
мущение обратной полярности — состояние покоя на фоне актив-
ности — в такой системе не может быть стационарным, и его дли-
тельность будет увеличиваться.
В случае обратного соотношения скоростей, | K(yPi)| > | K(yPj) |,
будет происходить формирование стационарного БИ обратной по-
лярности. Длительность БИ прямой полярности будет с течением
времени увеличиваться. Ясно, что при равенстве скоростей можно
сформировать стационарные БИ обейх полярностей и с произ-
вольной длительностью. Так же, как и в ждущей системе, здесь
имеется минимальная скорость стационарного БИ Kmia ~ е. Поэ-
104
тому При И(уР1) < Kmin или К(уР1) < Kmin формирования ста-
ционарного импульса не происходит (см. рис. 4.15). В процессе
распространения фронт и спад импульса сближаются и возмущение
исчезает. Существуют также триггерные схемы (случай ур > укр >
> 7Рз)> в которых вообще невозможно распространение импульс-
ных возмущений.
Рассмотренные в этой главе примеры БФ и БИ не исчерпывают
возможных вариантов распространения возмущений в активных
кинетических системах, однако можно выделить характерные осо-
бенности в описании таких процессов. Для импульсных возмуще-
ний выработаны определенные математические образы; а) в фазо-
вом пространстве х, у, Эх/Эт? это предельные циклы; б) в конфи-
гурационном пространстве V, у зто особые точки и линии между
ними на зависимости И(у) (сами точки соответствуют стационар-
ным БФ). Кроме того, выполняется правило чередования устой-
чивых и неустойчивых стационарных волн. Поэтому можно ука-
зать некоторую границу (и порог для внешних возмущений) пере-
хода от одной устойчивой структуры к другой. В сильнорелакса-
ционных системах качественный анализ пространственно-времен-
ных процессов можно проводить с помощью двух характеристик:
нуль-изоклин и зависимости V= V(y).
ГЛАВА 5
АВТОНОМНЫЕ ИСТОЧНИКИ ВОЛН
Особое место среди характерных АВ-структур в однородной
среде занимают автономные источники волн. Как мы увидим в
гл. 6, и в неоднородном пространстве при отсутствии синхрониза-
ции могут возникать сложные режимы распространения автоволн.
К числу таких режимов относится режим порождения бегущих
волн водителями ритма (пейсмекерами) — локализованными об-
ластями автоколебательной среды, где частота колебаний выше,
чем в окружающем пространстве. Мы будем в основном касаться
таких АВ-источников, которые порождаются в однородном прост-
ранстве. Такие источники можно назвать само- или автопейсме-
керами.
К числу самопейсмекерных источников в одномерном простран-
стве можно отнести режимы ’’эхо” и ’’делящийся фронт”, возникаю-
щие благодаря перезапуску двух соседних малых областей активной
среды (см. §5.1). Эти режимы осуществляются в двухкомпонент-
ных средах и не являются в строгом смысле устойчивыми. Устой-
чивые источники могут существовать в трехкомпонентной среде
(§5.3 и 5.4). Это так называемые ведущие центры (ВЦ) и стоя-
чие волны. Имеются также режимы, промежуточные между стоя-
чими волнами и ВЦ, — так называемые перемежающиеся источни-
ки БИ, которые можно рассматривать как блуждающие ВЦ.
В двумерных и трехмерных средах могут возникать источники
типа вращающихся волн или ревербераторов, которые рассматри-
ваются в § 5.5.
5.1. Источники типа ’’эхо” и ’’делящийся фронт”
Возможно ли в модели однородной среды существование перио-
дических решений из-за взаимодействия ее соседних активных
элементов, находящихся в ждущем или триггерном режиме? На
рис. 5.1 иллюстрируются механизмы образования таких источни-
ков с помощью аксиоматического описания. Видно, что ’’эхо”
(рис. 5.1а) может существовать только тогда, когда длительность
106
Рис. 5.1. Источники генерации БИ: ’’делящийся фронт” в неавтоколебатель-
ной среде (а); ’Ъхо” - взаимный перезапуск соседних элементов среды (б).
Решения построены на плоскости г, Г. Отрава представлены изменения во
времени состояний двух элементов средыв точках г, нг, [119]
Рис. 5.2. Эволюция неподвижного фронта возбуждения: уход фронта отточ-
ки остановки г„ (а), деление фронта в случае согласования медленных дви-
жений по обе стороны от фронта (б) [63]
БИ т связана со временем рефрактерности/? соотношением t!R>M..
При этом источник состоит из двух элементов и имеет ’’нулевой”
размер [116]. Аналогичные условия были получены в модели из
двух релаксационных ждущих генераторов, связанных диффузион-
но [100]. Источник, основанный на ’’делении фронта”, является
частным случаем эхо и реализуется при т = R/2 (рис. 5.16). Как
эхо, так и делящийся фронт могут быть также рассмотрены с по-
мощью базовой модели (2.53), содержащей две переменные при
условии е < 1.
Для анализа возможных решений воспользуемся качественны-
ми характеристиками I, II, III (см. § 3.5). С помощью характерис-
107
тики V= И(у) установлено, что для образования источника БИ
необходимо задать начальные условия в виде остановившегося
фронта возбуждения (см. § 4.4). Другие начальные условия при-
водят к формированию либо одного, либо двух расходящихся БИ.
Эволюция остановившегося БФ может протекать двумя путями.
Если скорости медленных движений с разных сторон неподвижно-
го фронта подобраны соответствующим образом, в частности,
когда характеристики F = 0h</>=0b (2.53) обладают симметрией
и скорости медленных движений равны [161], будет происходить
деление фронта (рис. 5.2а). Первый путь эволюции остановившего-
ся БФ в конфигурационном пространстве отражает изображающая
точка, которая из начального положения Ог (гдеу! = у3 = укр)
проходит через всю неустойчивую область 1 (на характеристике II)
до границы гг', на которой и происходит деление фронта (рис. 5.3).
Как уже отмечалось в §3.5, достигнуть границы гг' она может
только, двигаясь вдоль разделяющих траекторий. При этом на
фронте не возникает неустойчивой сдвиговой моды возмущения.
Второй путь связан с процессами, в которых отсутствует согла-
сованность медленных движений с разных сторон фронта. В этом
случае фронт уйдет в ту сторону, где изменение медленной пере-
менной происходит быстрее (рис. 5.2а). В конфигурационном про-
странстве изображающая точка в области 1 (см. рис. 5.3 и 3.11)
сходит с разделяющей траектории, что соответствует появлению
нарастающих сдвиговых возмущений. Эти возмущения приводят к
убеганию фронта от неустойчивой точки остановки.
Итак, видно, что оба пути эволюции связаны с неустойчиво-
стями неподвижного фронта к разным модам возмущений: при
делении фронта нарастает антисимметричная мода с одним пере-
сечением нуля; в случае ухода - сдвиговая мода. В обоих случаях
можно специальным образом подобрать параметры системы так,
что окажется возможным существование строго периодического
АВП в системе. Чтобы показать это, воспользуемся результатами,
изложенными в §3.5.
Рис. 5.3. Траектории в конфигурационном
пространстве ylt у3, приводящие к делению
фронта (при движении по разделяющей тра-
ектории 1 не происходит роста сдвиговых
возмущений) и к уходу фронта от точки
остановки (вдоль траектории 2 происходит
нарастание сдвиговых возмущений)
108
Рис. 5.4. Схема работы периодического источника БИ - ’’делящийся фронт”.
Замкнутая траектория проходит через две плоскости yit у3 и
У1у У г, соответствующие неподвижным фронтам с различными наклона-
ми [201 ]
Сначала рассмотрим режим периодического деления. Пусть на-
чальное условие задано в виде неподвижного фронта с положитель-
ным наклоном при_У1 =у3 = укр. На рис. 5.4 это точка обозначе-
на 01. В результате медленных движений в месте нахождения фрон-
та образуется скачок медленной переменной. При этом изображаю-
щая точка движется в неустойчивой области 1 к граничной точке
Di по разделяющим траекториям. Это означает, что скорости мед-
ленных изменений у по разные стороны фронта согласованы и амп-
литуда неустойчивой сдвиговой моды всегда равна нулю. Когда
изображающая точка доходит до границы области 1, происходит
деление с образованием нового неподвижного фронта, но с проти-
воположным наклоном, и двух разбегающихся фронтов.
Дальнейшее рассмотрение нужно вести на плоскости у3,
соответствующей неподвижному фронту с отрицательным значе-
нием производной Ъх/Ъг. Происходит уменьшение скачка мед-
ленной переменной, т.е. движение от точки g2 к точке О2. Еще од-
ним условием периодичности процесса является такая согласо-
109
Рис. 53. Схема работы источника БИ типа ”эхо”в конфигурационном прост-
ранстве ух, у3
ванность в изменениях у по разные стороны фронта, что они в один
и тот же момент достигают значения укр (от точки g2 траектория
точно выходит на Ог). Вторая половина процесса от О2 через
D2, gi к Oi совершенно аналогична уже рассмотренному движе-
нию от 01 через D\, g2 к 02. Таким образом, в конфигурационном
пространстве, состоящем из двух плоскостей, периодическому
процессу соответствует замкнутая траектория OiDlg2O2glOt.
Этому режиму в аксиоматической модели соответствует случай
т/Л = й.
Описание работы источника ’’эхо” в распределенной системе свя-
зано с рассмотрением деталей повторяющегося процесса: уход
БФ от места остановки и последующее возникновение нового
фронта. При этом появление нового неподвижного фронта опреде-
ляется неоднородностью распределения медленной переменной, ко-
торое было сформировано предыдущим неподвижным фронтом.
Условия периодической повторяемости таких движений также мо-
гут быть найдены из качественного анализа. Пусть снова начальное
условие взято в виде неподвижного фронта при у =укр. Тогда тра-
ектория возможного периодического движения будет такой, как
показано на рис. 5.5. Изменение медленной переменной по обе сто-
роны неподвижного фронта происходит таким образом, что возни-
кает сдвиговая мода возмущения, которая, нарастая, приводит к
уходу фронта от места остановки. В конфигурационном простран-
стве этому состоянию соответствует точка gi. БФ распространяет-
ся в область, где система находится в состоянии покоя и, следо-
вательно, зона остановки переходит в возмущенное состояние с
новой неоднородностью в распределении медленной переменной.
110
Из-за этой неоднородности через некоторое время происходит
образование нового неподвижного фронта (точка К2 на рис. 55),
который снова уходит в сторону, где система находилась в состоя-
нии покоя, и тд.
Для того чтобы режим ’’эхо” был периодическим, необходимо
такое согласование медленных движений, при котором значения у
по обе стороны неподвижного фронта одновременно достигают
значения укр. На рис. 5.5 этому соответствует траектория, состоя-
щая из кусков Oig\K2O2 и O2g2K\Oi. Таким образом, из качест-
венного рассмотрения следует, что оба режима — периодическое
деление фронта и зхо — возможны лишь при специальном подборе
скоростей медленных движений на разных ветвях N-образной
нуль-изоклины. При других условиях обязательно наступит мо-
мент, когда фронт от места остановки уйдет в область возбужден-
ного состояния и вся система перейдет в состояние покоя [63].
Заметим также, что при т < /?/2 автономных источников БИ не
возникает.
Важным является вопрос о характерном размере самопейсме-
кера. Численные расчеты показывают, что зхо и делящийся фронт
имеют размер порядка длины фронта возбуждения. Уменьшение
размеров системы до характерного размера источника приводит
к его разрушению.
Итак, какую новую информацию удалось получить с помощью
качественного описания динамической модели? Во-первых, пока-
зано, что источник ’’эхо” может существовать как в автоколеба-
тельной, так и в ждущей системах, а самопейсмекер ’’делящийся
фронт” может работать и в триггерной среде. Во-вторых, показано,
что периодическая генерация может быть получена лишь при спе-
циально подобранном виде функций F (х, у) и (х, у). Поэтому
периодический режим является негрубым относительно вариации
параметров двухкомпонентной системы. В связи с этим представ-
ляет интерес вопрос о возможных модификациях двухкомпонент-
ной системы, которые могли бы обеспечить структурную устой-
чивость решений. Этой проблеме посвящены § 5.3 и 5.4. В-третьих,
определен характерный размер одномерного источника, равный
длине фронта.
5.2. Генерация бегущих импульсов на границе ’’ждущей”
и ’’триггерной” сред
В системе с двумя переменными БИ могут также возникнуть на
неоднородности среды, соответствующей переходу от ждущего
к триггерному режиму ее точечной модели. Полное описание
механизма такого источника пока не выполнено. Однако этап
эволюции системы к делению фронта на неоднородности может
111
быть рассмотрен с помощью используемого нами качественного
подхода. Фронт БИ проходит в область с триггерными свойства-
ми- Спад БИ может остановиться на границе, и тогда реализуется
один из трех режимов: после остановки спад через некоторое вре-
мя проходит в область с триггерными свойствами; остановивший-’
ся спад генерирует несколько БИ, а потом проходит в область
с триггерными свойствами; остановившийся на границе спад не-
прерывно излучает БИ [88, 89].
Рассмотрение этих процессов проводилось на модели (2.52)
с нелинейными функциями в виде
F(x,y) = A [1 +ехр(1 -х-у)/6]-1 -х,
>р(Х,у) = В [1 +ехр(1 -х-у)/5]-1 -у.
(5.1)
(5.2)
Возможные варианты нуль-изоклин в разных областях изучаемой
системы показаны на рис. 5.6. Условия остановки спада БИ могут
быть получены из рассмотрения нуль-изоклин. В ждущем режиме
А =А* < 1, а х-нуль-изо клина показана кривой 1. БИ соответствует
траектория, показанная пунктирной линией. В месте спада такого
импульса значения медленной переменной равны В* = 2 — А* — В.
При этом Укр = 1 + А* 12. Если параметры триггерной области та-
ковы, что Укр.тр > Д*, т-е. 1 — Атр/2 > 2 — А* - В, то набегающий
на границу спад только замедлит свое движение и, не останавли-
ваясь, пройдет дальше. Если же 0 < укр,тр = 1 — Атр/2 < 2 —А*-В,
то спад БИ обязательно остановится. Далее, так же как и при ра-
боте источника типа эхо, эволюция фронта будет определяться
соотношением скоростей медленных движений с разных сторон
остановившегося спада. Выяснить особенности процесса формиро-
вания БИ, а также их периодической генерации с помощью исполь-
зуемого здесь качественного подхода, по-видимому, не представля-
ется возможным. Дело в том, что формирование импульса — сла-
борелаксационный процесс, в котором нужно учитывать движения
на расстояниях порядка длины фронта. Это видно не только из
Рис. 5.6. Нуль-изоклины, соответствую-
щие жнущему (7) и триггерным (2 н
Э) режимам работы системы (5.1) -
(5.2) [88]
112
Рис. 5.7. Трансформация ритма БИ, излучаемых границей раздела триггер-
ной и ждущей сред [89]
формы БИ, но и из переходного режима, показанного на рис. 5.7.
Частота генерации БИ оказалась такой высокой, что она превыша-
ет предельно возможную частоту пропускания БИ в ждущей среде.
На рис. 5.7 видно, что третий импульс выпадает. Отметим, что БИ,
следующие с частотой, близкой к предельной, не могут быть опи-
саны с помощью приближенного подхода (см. § 3.5).
5.3. Стабильные ведущие центры
В рассмотренных выше пространственно однородных системах с
двумя переменными генерация волн может существовать только
при специально подобранных значениях параметров системы. В на-
стоящем параграфе рассматривается возможность стабилизации
работы ВЦ с учетом третьей переменной. Однако стабилизация
источников типа ’’эхо” пока еще не изучалась. С другой стороны,
были построены трехкомпонентные модели ВЦ, характеристики
которых качественно соответствуют экспериментальным дан-
ным [46],
Так, в гл. 1 показаны экспериментальные записи распределе-
ний в последовательные моменты времени для режима ВЦ реакции
Белоусова — Жаботинского (см. рис. 1.26). Видно, что в области
генерации изменены параметры колебаний: амплитуды, крутизны
113
фронтов и тд., но эти изменения носят скорее количественный,
чем качественный характер, как в случае эхо. Картина очень напо-
минает ситуацию теории пейсмекеров неоднородных двухкомпо-
нентных систем. В них генерация волн определяется измененными
параметрами в области с повышенной частотой собственных коле-
баний. В трехкомпонентных системах возможно образование само-
пейсмекерных зон — ВЦ. В этом случае третья переменная отсле-
живает различия в параметрах БИ в точке генерации волны и вда-
ли от нее, запоминает эти различия на время этапа медленных дви-
жений и использует их для ускорения этих медленных движений.
Тем самым увеличивается частота колебаний в зоне генерации
волны. В результате образуется стабильный ВЦ.
Решения типа стационарных ВЦ можно получить, если перейти
к автомодельной переменной:
т? = t + а (г, е),
(5.3)
если е — как обычно, малый параметр. Задача о ВЦ при этом сво-
дится к определению зависимости фазы колебаний а от координа-
ты. Точное решение получить не удается, но схема метода последо-
вательных приближений здесь довольно-таки проста. В исходную
систему следует подставить разложения по степеням е функций
а = S ak(r) ек, xt = S xtk (г, т?) ек, со = ы0 + S шкек, где ыи ы0 —
к к к
круговые частоты колебаний в режиме ВЦ и в точечной системе.
Применение этого метода требует знания формы предельного цик-
ла при е = 0, например точечной системы. Тогда уравнения для
последующего приближения получаются усредаением относи-
тельно траекторий, полученных в предыдущем приближении.
а
Область 8И,
Рис. 5.8. Зависимость фазы колебаний в
пространстве от расстояния до ВЦ; штрихо-
вой пинией показана зависимость для
плоских бегущих волн
Аналитическая реализация этой схемы сталкивается с техничес-
кими трудностями. Полностью строго ее удалось выполнить лишь
для квазигармонического случая двухкомпонентных систем, на-
пример, с кинетикой Ван-дер-Поля, брюсселятора. Не останавли-
ваясь на промежуточных выкладках, укажем, что основным ре-
зультатом первого приближения является положительность прира-
щения частоты в режиме ВЦ и вид уравнения для распределения
фаз: div grad (ехр а) = ехра. Зависимость фазы от координаты
114
для одномерного случая показана на рис. 5.8. Она соответствует
наблюдаемому в эксперименте процессу генерации плоских волн.
Следующим является вопрос об устойчивости полученных реше-
ний. Для квазигармонических систем можно дать однозначный
ответ: такие решения неустойчивы. Оки переходят либо в синфаз-
ные колебания (двух- и более компонентные системы), либо в
стоячие волны (трех- и более компонентные системы) (см. §5.4).
Именно в силу этого обстоятельства опущено обсуждение свойств
рассмотренных выше решений. В случае релаксационных систем
стабильные ВЦ становятся возможными. Применение аналитичес-
ких методов здесь сопряжено с большими трудностями. В то же
время рассмотрение механизмов, стабилизирующих ВЦ в моде-
лях с оговоренной ранее структурой, проводится достаточно просто
на качественном уровне.
Как уже говорилось, стабильные ВЦ возможны в системах с
тремя переменными, одна из которых служит для ’’запоминания”
области генерации БИ и ускорения этапа медленных движений
в ней, т.е. сокращения периода колебаний. В качестве примера
таких систем рассмотрим следующую модель:
Ьх Ь2х
— =у (1 -х)-(уо +Z)x+Dx~-T,
at ar
Эу (ру - к)х . Ь2у
е-^-=13у(1-х)-^-----’--cy'+Dy -4 ,
Эг qy + т br2
Эг b2z
— = W + ky2 — Rz + Dz —- ,
bt br2
(5.4),
(5.5)
где Dy > Dx.
Переменные x и у при Dx = Dy = 0 образуют релаксационную
автоколебательную подсистему (5.2), вид фазовой плоскости ко-
торой показан на рис. 5.9. Эта подсистема является редукцией мо-
дели релаксации Белоусова — Жаботинского, так называемого оре-
гонатора (§2.6). Здесь роль ’’быстрой” автокаталитической пере-
менной играет у. При представленном на рис. 5.9 расположении
нуль-изоклин движение изображающей точки вдоль верхнего участ-
ка у-нуль-изо клины практически не зависит от значений z, а вдоль
нижнего участка — зависит, а именно ускоряется при больших зна-
чениях z. Важно заметить, что зависимость скорости движения
изображающей точки от z монотонная, т.е. любые, пусть даже мгно-
венные добавки на нижнем участке сокращают период колебаний.
Более того, именно это свойство полной системы обеспечивает
наличие области параметров, при которых происходит только
115
Рис. 5.9. ВЦ в системе (5.4)-(53): а - нуль-изоклины подсистемы (5.4) н
проекции интегральных кривых (предельных циклов) на фазовую плоскость
подсистемы из точек пространства г0 = 0 и г = 1; б - стационарные распре-
деления величсиы max{z(r, Г)} - результаты «меленного интегрирования
t
(к= 1; е = 10-’; р = 5; к = 10'3; q = 4; т=1; с = 0; 3=1; =0,02; 1^ = 0;
Я =0,1; Dx=Dz=0, Dy = 0,2)
’’жесткое” возбуждение автоколебаний. При этом проекция особой
точки находится на нижней ветви у-нуль-изо клины.
В распределенной системе проекцией на фазовую плоскость
траектории движения изображающей точки, элемента пространства,
находящегося в области ВЦ, является цикл, который охватывает
все проекции фазовых траекторий, соответствующих элементам
пространства, вдоль которых распространяются БИ, генерирован-
ные ВЦ. Это является следствием того, что переброс изображающей
точки с верхнего на нижний участок у-нуль-изоклины (и обратно)
в центре области пространства, излучающей БИ, может только за-
медлиться: диффузия переносит отсюда компонент у для ускоре-
ния переброса на соседних участках и тормозит переброс в нем
самом.
Третье уравнение системы описывает релаксацию переменной z
к текущему равновесному значению. Время релаксации является
важнейшим параметром, определяющим стабильность ВЦ. В случае
мгновенной релаксации (относительно большие значения парамет-
ра R) режимы системы не отличаются от режимов систем с двумя
переменными. Для больших времен релаксации характерна слож-
ная динамика, например в точечной системе — пичковая генерация.
Режим ВЦ возникает при временах релаксации порядка периода
колебаний. При этом в области инициации волны находится
max{z(r, г)} , (см. рис. 5.96). Такое распределение max {z (г, t) }
t
обеспечивает резкое уменьшение времени медленных движений
(см. первое уравнение системы (5.4)), а значит, уменьшение перио-
да колебаний и стабилизации ВЦ.
116
Следует также рассмотреть возможность возникновения альтер-
нативных режимов. Таковым может быть режим перемещающего-
ся ВЦ. Действительно, в области инициации БИ всегда находится
max { z (г, г) } , больший, нежели max{z (Г) } соответствую-
о < t < г0 t
щей точечной модели (рис. 5.96). Этим обеспечивается повышение
частоты колебаний в распределенной системе по сравнению с соо
и соответственно генерация следующих БИ. Однако, если распре-
деление max{z (г, г)} пологое, то значение у, п (точка срыва на
t
фазовой плоскости) может быть достигнуто раньше изображающей
точкой пространства, удаленного от места инициации волны. В ре-
зультате следующий БИ будет инициирован этой новой областью.
Если распределение max {z (г, t)} окажется слишком плавным или
t
диффузия z-компонента относительно большой, то градиенты у-пе-
ременной перед инициацией следующих БИ уменьшаются и, следо-
вательно, это распределение становится все более пологим; в ре-
зультате после генерации нескольких БИ система возвращается в
однородное состояние.
Из изложенных соображений были сделаны предварительные
оценки параметров, при которых в системе можно возбудить
режим стабильного ВЦ. Затем на ЭВМ был выполнен цикл экспе-
риментов, которые подтвердили наши рассуждения относительно
режима стабильных ВЦ. Отметим, что профили х-компонента в
последовательные моменты времени качественно совпадают с на-
блюдаемыми в экспериментах на реакции Белоусова — Жаботинс-
кого (см. рис. 1.26). Численные эксперименты также подтверди-
ли существование решений типа перемещающегося ВЦ и возмож-
ность возбуждения автоколебаний в системах, точечная кинетика
которых не обладает предельными циклами.
Следует подчеркнуть, что для нашего качественного рассмотре-
ния в отношении характеристик подсистемы (5.4) использовались
обычные .для активных систем предположения, а именно релакса-
ционность и N-образность нуль-изоклины. Основную нагрузку не-
сет связь между подсистемой и третьим компонентом. Однако
здесь также допустимо значительное разнообразие структур урав-
нения (5.5). Например, можно заменить связь с подсистемой (5.4)
на следующую:
9z d2z
— =6 (х-x0)-Rz+DZ , (5.6)
ot dr
где в (x) - ступенчатая функция (0=0 при х < 0 и в ¥= 0 при х > 0).
Такой вид источника следует рассматривать как предельный случай
обычной кинетики, например окислительно-восстановительных
117
реакций, рассмотренных в [86]. Неаналитичность функций в (х)
не должна смущать — она позволяет в ряде случаев пользоваться
языком теории автоматов в исследованиях динамических систем.
Интересно заметить одну особенность модели (5.4)-(5.6).
Частота колебаний в режиме ВЦ при соответствующем выборе па-
раметров х0 и R может быть настолько большой, что устойчивое
распространение последовательности БИ становится невозмож-
ным. В этом случае, как показали численные эксперименты, об-
ласть генерации БИ, т.е. ВЦ, меняет положение от периода к перио-
ду, режим одиночного ВЦ становится неустойчивым. Стабилизи-
ровать режим с одиночным ВЦ можно, уменьшив его частоту,
например путем увеличения Dz.
Конечно, возможны и другие типы обратных связей (напри-
мер к (1 —х)1(кй + х + у), кх2 и т д.), обеспечивающие стабилиза-
цию ВЦ по обсужденному механизму. Сколько-нибудь полное опи-
сание класса таких источников (и вообще систем) вряд ли воз-
можно, да и, по-видимому, не требуется. Само понимание механиз-
ма стабилизации ВЦ представляется некоторым эквивалентом
описания общей структуры базовых моделей этого вида.
Теперь проиллюстрируем другой механизм стабилизации ВЦ на
примере следующей модели [46,48]:
Эх Э2х
— -zy+х2у - (В+1)х+£)х —— ,
bt br
Эу , Э2?
bz b2z
—= W + kx - Rz + DZ —
bt br2
Авто волновая двухкомпонентная подсистема (5.7) является
простой модификацией широко используемой модели ’’брюсселя-
тор” (§2.6). На рис. 5.10 показаны нуль-изоклины и предельный
цикл соответствующей точечной системы при фиксированном зна-
чении z. Скорость движения изображающей точки зависит от z,
а именно: на вертикальном участке I она возрастает для боль-
ших z, на горизонтальном III — уменьшается. На наклонном участ-
ке II в релаксационном случае происходят быстрые движения,
слабо зависящие от z. В полной трехкомпонентной системе
(5.7) —(5.8) z возрастает, когда проекция изображающей точки
находится на нижнем участке III, а убывает на вертикальном. При
этом координаты точек срыва также зависят от z: срыв с верти-
кального участка ускоряется при увеличении z (рис. 5.10). Этими
сведениями о точечной кинетике мохяю ограничиться в качествен-
ном изучении механизма стабилизации ВЦ.
118
(5.7)
(5.8)
Рис. 5.11. Профили волн, инициируемых ВЦ модели (5.7) -(5.8) в последо-
вательные моменты времени (В = 36; W = 0,36; к = 0,05; R = 1; Dx =
= 2,5 10"*, Dy = 0; Dz = 2,5 • 10'3; Гвц ® 3,3; Го » 3,6)
Рис. 5.10. Структура фазовой плоскости автоколебательной подсистемы
модели (5.7)-(5.8)
Рассмотрим профили волн z -компонента, показанные на рис. 5.11.
Диффузия z-компонента стремится выровнять ее распределение по
пространству. Это приводит к тому, что когда проекция области
инициации волны лежит на горизонтальном участке, диффузия
переносит из этой области z -компонент, несколько уменьшая те-
кущие значения переменной z в ней; когда эта проекция попадает
на вертикальный участок, диффузия переносит z в область ВЦ, уве-
личивая ее текущие значения. Таким образом, в области инициации
волны за счет диффузии z-компонента происходит ускорение
движения и, следовательно, сокращение периода, т.е. стабилиза-
ция ВЦ.
Перечислим некоторые свойства рассмотренного механизма ВЦ.
Период колебаний зависит от Dz: он сокращается при больших зна-
чениях Dz. Однако существует такое критическое значение Dz =
= Dz кр> что при Dz > Dz кр возникает режим с перемещающейся
областью инициации волн. Это обусловлено тем, что стадия умень-
шения х-переменной удлиняется в области инициации волн и дру-
гая область успевает ее обогнать по фазе колебаний. ВЦ неустойчив,
если Dy больше критического значения (т.е. когда скорость БИ
велика): в этом случае устанавливаются синфазные колебания.
Отметим также, что период колебаний зависит от расстояния меж-
ду областью инициации и границей системы, если это расстояние
меньше длины волны.
119
Подчеркнем особую роль взаимной диффузии. Она может ста-
билизировать ВЦ даже в системах, которые без нее ведут себя
как двухкомпонентные. Примером служит следующая модель [47]:
Эх , Э2х
— = z+х2у - (В + 1)х + Dxx —— ,
ЭГ Эг2
(5.9)
by , Э2у
' 9z
— = W - Rz +
ЭГ
Э Г dz Эх by 1
+ Т" V +п« (Х)Т О') Т" ’ <51°)
Эг L Эг Эг br J
где АВ-подсистема (5.9) является брюсселятором, а источник в
(5.10) не зависит от переменных х и у. Механизм стабилизации
ВЦ в этой модели такой же, как и рассмотренный выше. Только
перенос z-компонента на горизонтальном и вертикальном участках
цикла (см. рис. 5.10) осуществляется за счет градиентов х- иу-ком-
понентов на профилях бегущих волн. Очевидно, что наиболее
благоприятные условия возникновения ВЦ имеются в системах с
Dzx > 0 и Dzy < 0; коэффициенты Dyz и Dxz на АВП практичес-
ки не влияют. Численные эксперименты [47] показали, что Dzx и
Dzy, необходимые для стабилизации ВЦ, должны быть несколько
меньше Dzz и удовлетворять требованиям термодинамики необ-
ратимых процессов (см. § 2.3).
Важно также отметить, что если в предыдущих моделях возбуж-
дение АВ требовало локализованных возмущений большого отно-
сительного уровня, то в модели со взаимной диффузией оно может
протекать в мягком режиме.
Теперь сравним два механизма стабилизации ВЦ. В основе пер-
вого, (5.4) — (5.5), лежит адаптация и запоминание третьей перемен-
ной формы БИ, зависящей от расстояния до области его инициации.
Для второго, (5.7) —(5.8), характерно перераспределение третьего
компонента на этапе медленных движений. Легко видеть, что вто-
рой механизм может быть реализован лишь в системах с характер-
ным масштабом диффузии z-компонента, сопоставимым с длиной
бегущей волны, например в системах с относительно высокой
частотой колебаний и малой скоростью распространения БИ.
Заметим, что иногда полезно первоначально изучать режимы со-
ответствующей простейшей дискретной модели (см. §3.4). Дейст-
вительно, если в двух диффузионно связанных ’’ящиках” задать
надпороговое, большое возмущение однородного состояния, то
120
возможны следующие типы дальнейших движений: а) затухание
неоднородных возмущений, т.е. установление синфазного режима;
б) автоколебания, при которых один из элементов всегда опере-
жает по фазе другой; в) автоколебания, при которых элементы
поочередно обгоняют друг друга по фазе; г) антифазные автоко-
лебания; д) стационарное состояние с различными значениями
переменных в элементах. Лишь эти качественные типы решений
можно встретить при исследовании простейшей дискретной модели.
Стабильный ВЦ в распределенной модели возможен только, если
реализуется решение б) дискретной модели; перемещающимся ВЦ
соответствует решение в); стоячим волнам - решение г).
Сопоставим теперь экспериментальные данные о ВЦ с результа-
тами моделирования. В реакции Белоусова — Жаботинского (§ 2.5)
х является медленной переменной. Время увеличения концентра-
ции в БИ, может быть значительно меньше, чем Й периода коле-
баний. Поскольку для существования режима ’’эхо” необходимо,
чтобы тви/трефр > 0>5, то автогенерация волн не может идти в
этом случае по такому механизму. Базовые модели ВЦ с тремя
переменными правильно описывают основные черты наблюдаемого
явления. Причем, учитывая временные и пространственные харак-
теристики Г и X экспериментальных ВЦ, следует предпочесть
механизм модели (5.4) —(5.5) для объяснения этих экспериментов.
5.4. Стоячие волны
На отрезке с граничными условиями второго рода любое реше-
ние можно представить в виде суперпозиции нормальных мод —
стоячих волн с длинами X* = 2£/Х (к = 0, 1, 2, 3, . . .). Если усло-
вие самовозбуждения (Re{P*) > 0, гдеР* — корни дисперсионно-
го уравнения; см. § 3.2) выполняется для небольшого числа волн,
то вблизи точки бифуркации волны с длиной Х*,гдеЯе {/\} <
< Im { Рк }, можно построить квазигармоническое одномодовое
приближение решения. Однако приближение имеет существенный
недостаток: оно не позволяет даже на качественном уровне рас-
смотреть проблему устойчивости стоячей волны. Мы ограничимся
анализом взаимодействия двух мод, дополнив его результатами
численного эксперимента [45, 48]. При этом основное внимание
уделяется взаимодействию с нулевой модой (к = 0), как наиболее
’’опасному” для устойчивости стоячей волны.
Итак, представим решение в виде ряда
Xi (t, r) = xt+ S Aik (t) cos (k, r), (5.11)
к = 0
где к = ттк/L. Подставив это разложение решения в исходную ба-
121
зовую систему уравнений и собрав члены с одинаковыми простран-
ственными гармониками, получим уравнение, определяющее А/к-
d п
-~Aik= S (Мц-к^иУА/к+Ф^Агк.Агк,...), (5.12)
dt / = 1
1 = 1,2....и; к = 0, 1, 2, . . . , Ф; - нелинейные функции ампли-
туд мод. Бесконечномерная система уравнений (5.12) эквивалент-
на распределенной системе и, естественно, нисколько не проще ее.
Система уравнений (5.12) значительно упрощается, если учесть,
что моды с Re{7\} < 0 и постоянными времени I Re{Pk} |-1,
существенно меньшими характерных времен изучаемого АВП,
можно исключить из рассмотрения. Последующее упрощение дости-
гается в случае слабонелинейных систем, допускающих квазигар-
монические решения малой амплитуды. Рассмотрим схему построе-
ния укороченных уравнений, предполагая, для простоты, отсутст-
вие резонансов между модами (1т{/\) несоизмеримы). Приве-
дем систему уравнений (5.12) к стандартному для метода усред-
нения виду. Учитывая, что матрица системы клеточно-диагональна,
это преобразование можно рассмотреть на примере одной клетки,
соответствующей некоторому к. Совокупность собственных векто-
ров матрицы {Му — к2Dy} образует матрицу {Ву}к- Введем
новые переменные
Aik= S BykAjk. (5.13)
/ = i
В собственном представлении матрица диагональна. Поэтому урав-
нения для новых комплексных переменных Aj к имеют вид
d ~ ~ ~ ~ ~
“ Ajk = Re ( Рк 1 Ajk + Ф/fc (Лю, Аю, .. ., Ajk,...). (5.14)
dt
К этим уравнениям уже применим метод усреднения Боголюбо-
ва Митропольского [41]. Однако удобнее вначале перейти к
действительным переменным
Ai к ~ ufcexp{/[a>fc г + ук (0] > >
A2fc=A*fc, Азк = Wk, (5.15)
где cofc = Im{PfcJ, Wk, ик, — действительные функции. Отбра-
сывая вибрационные члены в уравнениях для этих функций, полу-
чим систему уравнений для амплитуд и фаз мод:
d
— ик=ик Re{Pk } + fk (Цк, Wk, ик , Wk,, • • • ),
Я* 1 1
122
d
uk~>pk=gk(uk,Wk,uk,Wk ...), (5.16)
dt 1 1
d
~tWk~ Wk?k3 +flc3 (Uk> Wk, ukt,^kt, ),
где Ркз — действительный корень дисперсионного уравнения при
и = 3 (в случае п-2, очевидно, уравнения для Wk отсутствуют).
При отсутствии ДС-неустойчивости Ркз < 0.
Условие ’’физической реализуемости” точечной системы (от-
сутствие неограниченно нарастающих решений) гарантирует су-
ществование стационарных решений uk^Q (5.16), если хотя бы
для одного выполняются условия RefjPjt} > 0 и Рк* < 0, которые
являются достаточными условиями существования автоколеба-
тельного режима распределенной системы. Опуская доказательство
этого утверждения, укажем, что оно проводится аналогично до-
казательству достаточных условий существования ДС (§7.1).
Отсюда ясен смысл их использования в § 3.2 в качестве опреде-
ления колебательной неустойчивости.
Колебательная неустойчивость может иметь место при несколь-
ких значениях к. Например, в системах с п = 2, если Re{/\} > 0
(к Ф 0), то и Re{P0 } > 0. При этом существуют три стационарных
решения (5.16): tzfc>u0, “fe=0; йъ"~йк. Очевидно,
что только первое из них представляет стоячую волну. Обсудим
вопрос об устойчивости этих решений системы (5.16), соответст-
вующих двухмодовому приближению распределенной системы.
В целях наглядности рассмотрим автоколебания в простейшей
дискретной модели — пара диффузионно связанных генераторов
(§ 3.4). При этом увидим существенные различия между система-
ми^ и = 2 и и = 3. Вводя нормальные координаты5 = (*х+ 2х)/2
и Д=(*х— 2х)/2, получим уравнения, совпадающие с (5.12),
где Л10 +->$!...АПк +-+&п. В нелинейных функциях и Фд
можно выделить характерные группы членов (внешние, пара-
метрические, собственные):
Ф'5 = Ф'*вн(Д ) + ^(3,5) + ф«соб(5),
Ф/д = 0 + Ф/дп.р(2,5) + Ф/дсоб(2), (5.17)
где Ф15вн содержит только четные степени Д, Флупвр - произ-
ведения Д5, Д25 и т.п., Фг-5соб строго соответствует точечным
уравнениям,Ф/дпар содержит произведения SД ,S2A и т.п.,Ф/Дсоб-
только нечетные степени Д. Присутствие таких групп определяется
наличием соответствующих степеней в нелинейности точечной
123
приведенной системы, например в системе Ван-дер-Поля (чисто
кубическая нелинейность) Ф;$вн = 0, а в системах, содержащих
только четные нелинейные функции Ф/£соб = 0, и в моделях типа
’’брюсселятор” (§ 2.6) присутствуют все группы членов.
Рассмотрим вначале системы с и = 2, предполагая, что условие
перехода к (5.16) (квазигармоническое приближение) выполнено.
Для систем типа Ван-дер-Поля доказана теорема о том, что устой-
чивым может быть лишь синфазный режим автоколебаний (см.
§ 6.1). Для генераторов типа ’’брюсселятор” справедливо аналогич-
ное утверждение. Приведем схему его доказательства.
Если Re{Pfc) > 0, то и Re{Ps} > 0 (см. рис. 3.4). Пусть в систе-
ме имеют место синфазные автоколебания (S Ф 0). Применив
усреднение к уравнениям Д-генератора, получим Re«PA +
< — (dx + dy). Это обусловлено видом членов 52Д в Ф|Д , т.е.
кубической нелинейностью. Условия самовозбуждения Д-генера-
тора перестают выполняться, происходит асинхронное гашение
Д-колебаний (см., например, Мигулин и др., 1978), и, следова-
тельно, синфазный режим (5=#0 и А = 0) устойчив. Чистый Д-
режим невозможен из-за наличия членов Ф/5ВН- Более того, не-
возможны и несинфазные квазигармонические автоколебания
(Д =#0 и S =#0), так как Re{Ps} = (Ве{Рд) +dx + c?y). При этом
S-генератор имеет большую амплитуду колебаний, что обеспечивает
асинхронное гашение Д-генератора; обратная ситуация невозможна.
В системах, содержащих только четные степени в нелинейностях,
асинхронного гашения Д-генератора может не происходить, так
как в укороченных уравнениях (Ф|Дпар> = 0. Однако здесь исполь-
зования первого приближения уже недостаточно. Не останавливаясь
на деталях применения последующих приближений, укажем, что
чистый Д-режим неустойчив, как и режим биений на частотах
Im{P$ } и 1т{Рд}, а устойчивы сложные одночастотные автоколе-
бания. В качестве примера укажем модель темновых реакций
фотосинтеза [132,191].
Перенося изложенные соображения на распределенные системы,
нетрудно видеть, что квазигармонические стоячие волны в систе-
мах с и = 2 неустойчивы. В системах, имеющих кубические члены
в нелинейностях, устойчив синфазный режим. В системах с квад-
ратичными нелинейностями устанавливаются сложные АВ-режимы,
например режим ’’зыби” [46]. Напомним, что в релаксационных
системах с чисто кубической нелинейностью существуют режимы
’’перезапуска” (дискретные модели) (§5.1). Однако и здесь
стоячие волны не реализуются.
В классе трехкомпонентных систем, так же как и для режимов
ВЦ, возможны иные ситуации. Проиллюстрируем это на примере
124
расширенной модели ’’брюсселятор”:
Fx — z + х2у - (В + 1)х,
Fy=Bx-x2y, FZ~W + кх -Rz, (5.18)
где Fx и Fy соответствуют уравнениям (2.54), но z (Ав обозна-
чениях § 2.6) является переменной, образующей запаздывающую
обратную связь. Опустив несложные выкладки, приведем выраже-
ния для условий самовозбуждения (для простоты, dx -dy~ О,
dz*0);
Re{Ps} ~R(k-G2) + G(R2 + z2)-k(z2 +G) = cs,
Re{PA} ^cs +2ds[k + GR + G(R -G + 2dz)], (5.19)
где G=B-\ -z2-, неравенство G>0 является условием само-
2,1
Рис.5.12. Стабильный режим несинфазных колебаний трехкомпонентной
дискретной модели (5.18); расстояния между тонкими штриховыми линия-
ми суть отклонения от идеального антифазного режима
125
возбуждения брюсселятора. Из (5.19) следует, что условия само-
возбуждения Д-генератора при G > 0 if достаточно больших зна-
чениях dz выполняются, даже когда Re{Ps}<0 (см. рис. 3.5).
Несннфазные автоколебания возможны и при Re{Ps) >0; соот-
ветствующий пример дан на рис. 5.12 (В = 5; И>=2,2; В =4,1;
fc = 3; dx = 0,075; dy = 0; d2=l; Ps = 0,085 ±j 1,03 и =
= 0,19 ±/1,6). В этом примере Д-генератор асинхронного гасит
колебания S-генератора. Заметим, что из-за наличия квадратичной
нелинейности 5(т)=#0 (Ф5вн¥=0), но изменения S (г) проис-
ходят не с частотой а с частотой 2 — сод, и относительно малы.
В случае Re{jP$} >0 для устойчивости несинфазного режима
требуется, чтобы сод > ws, a Re{Ps} может быть больше Re{/’A}.
Если же 0< Re{Ps} < Re{PA}, но > о>д, то устойчивы лишь
синфазные автоколебания.
Если Re{Ps)>0, то синфазный режим всегда устойчив. При
этом, если как и в нашем примере, устойчив и несинфазный режим,
система является частотным триггером, имеющим два состояния:
с 1) ws (Х=0)и2)шд (S<S).
Пользуясь эквивалентностью укороченных уравнений (5.15)
дискретной модели и двухмодового приближения, полученные
результаты легко перенести на распределенную модель: одномодо-
вый режим с кФО в (5.18) устойчив. Пример такого режима
показан на рис. 5.13, гДе Re{P0J < 0, а для к> 3 Re{Pfc} >0.
Не останавливаясь более на таких системах, рассмотрим пример
модели, содержащей только квадратичные нелинейности (моди-
фикация модели ’’орегонатор” (2.57)):
9 Э2
— х~у(\ -х)-ух +DXX —- х,
bt br2
9 , Э2
—- у = 0у(1 -x)-pyz-су2 +ez +Dyy —у, (5.20)
ot or
9 92
— z=x -qyz-rz -Dzz — z.
bt br
Характерным свойством точечной кинетики в (5.20) является
невозможность выделить автоколебательную двухкомпонентную
подсистему, а точечная система с п = 3 является автоколебательной.
Распределение амплитуд колебаний в одномодовом режиме пока-
зано на рис. 5.14. При этом Re{P0} < 0, а условия самовозбужде-
ния выполняются для мод в диапазоне значений к от- 7 до 12.
Отметим, что укороченные уравнения.первого приближения (5.16)
позволяют определить амплитуды колебаний мод и исследовать
их взаимодействия (т.е. и в этом рассматриваемая система отли-
126
чается от двухкомпонентной). Однако в этом случае точность
оценок параметров режимов значительно ниже, чем в случаях
систем с кубической нелинейностью. В моделях вида (5.20) от-
клонения от квазигармонической формы могут быть значитель-
ными даже вблизи точек бифуркации, но узлы вол.,ы остаются,
и, следовательно, этот АВП можно считать стоячей волной.
Коротко обсудим модификацию модели ’’брюсселятор”.
В отличие от (5.18), мы не дополним ее, а изменим: тримоле-
л
Рйс. 5.13. Распределение амплитуд автоколебаний в пространстве для моде-
ли (5.18) (В = 3,9; W = 0,342; к = 1,8; R = 2; Dxx = Dyy = 0; Dzz = 0,03)
Рис. 5.14. Распределение амплитуд автоколебаний в пространстве - для
модели (5.20) (т=0,2; 0 = 30; р = 30; е =0,45; <7 = 1; т=0,2; с =0,06;
Dxx=Dyy = 0, Dzz = 0,05). Высота заштрихованной области показывает
уровень отклонений от ’Идеальной” стоячей волны
кулярную реакцию (х2у) заменим на бимолекулярную (ху)
и введем кросс-катализ; теперь имеем
Fx = Az+ху — (В — 1)х — кх2,
Fy~ Вх — ху, Fz=Cx - Rz.
Особая точка системы (5.21) является устойчивым узлом (Re{/’s}<
< 0) при любых значениях параметров. Если Djj=O (i^=j),
то в этой модели невозможны никакие АВП. Однако при учете
взаимной диффузии получаем
&е{/\} ~ -а\к6 + (~DxyDz.yA -а2)к* -а3к2 -а*, (5.22)
где ар>0. Из (5.22) следует, что при достаточно большом зна-
чении параметра накачки А, если Dxy и Dzy имеют разные знаки
(это допустимо; см. § 2.2), система обладает непустым набором
самовозбуждаемых мод. Вблизи первой бифуркации возникает
127
АВ-режим стоячей волны. Если имеется широкий спектр само-
возбуждаемых мод, среди которых присутствуют моды с близ-
кими и (или) кратными собственными частотами, то между ними
происходят эффективные взаимодействия. При этом форма коле-
баний далека от квазигармонической. В таких системах реализуют-
ся разнообразные режимы автоколебательной активности.
5.5. Ревербераторы. Качественное описание
До сих пор мы рассматривали возможные механизмы источни-
ков БИ в одномерных системах. Как мы видели, для них уже раз-
работаны качественные модели и имеются подходы к их исследо-
ванию аналитическими методами. Иначе обстоит дело с изучением
АВ-источников в двумерных и трехмерных системах, основанным
в большинстве случаев на численных расчетах. Тем более важно
подвести итоги описания качественных эффектов, связанных с
существованием таких источников. Более подробное обсуждение
этой проблемы можно найти в ряде обзоров и монографий [97,
100,153].
Из экспериментов следует, что двумерные источники волн —
ревербераторы представляют собой достаточно стабильные к
внешним возмущениям спиральные структуры. Важное свойство
ревербераторов состоит в том, что они являются наиболее высо-
кочастотными из всех АВ-источников. Посылая импульсы с мак-
симальной частотой, эти источники вытесняют из среды само-
пейсмекеры всех других типов, и в результате среда оказывается
заполненной лишь спиральными волнами. Этот факт оказывается
существенным для АВП в ряде биологических систем. О сущест-
вовании спиральных волн в живых объектах упоминалось уже
в начале века. Однако математическое изучение таких волн на
аксиоматических моделях было начато лишь полвека спустя Ви-
нером и Розенблютом [263]. Балаховским [20] был построен
первый пример спиральной волны в непрерывной односвязной
среде. Кринским [116] были изучены качественные режимы в
неоднородных средах: появление и исчезновение ревербераторов
на неоднородностях и размножение ревербераторов. Существова-
ние таких источников в химических реакциях было впервые пока-
зано Заикиным и Жаботинским [87, 267]. В их экспериментах
были подтверждены предсказанные теоретически механизмы
возникновения ревербераторов на неоднородностях и из разрывов
фронта волны. Ревербераторы в трехмерном пространстве были
получены в [264]. Вращающиеся волны были зарегистрированы
в сердечной мышце, в коре головного мозга и других живых
объектах (см. гл. 1).
128
б
Рис. 5.15. Основные элементы ревербератора: а - область возбужденного
состояния; П - точка перехода фронта БИ (тонкая линия) в спад БИ (жир-
ная линия); б - периодически вращающийся ревербератор, R — радиус
ядра ревербератора; в - линия движения точки П - изменения фазы в
нестационарном ревербераторе, Яэф - радиус ядра такого ревербератора
1971
К основным параметрам ревербератора относятся: частота
генерации волн, критический размер и характеристики структу-
ры ядра, скорость движения самого ядра в пространстве. Обычно
у ревербератора выделяют две характерные области: ядро с захо-
дящим в него ’’языком” возбуждения и генерируемые им спи-
ральные волны. Ядро может быть в виде круга или в виде кольца
(так называемое ’’аномальное” ядро). При дрейфе источника
форма ядра становится более сложной, и определить ее однозначно
уже трудно. Стационарный ревербератор математически описы-
р ,------------------------------------------
вается спиралью Архимеда ф(р) = / \'R~2 -r~2dr, где р и ф —
R
полярные координаты. Такая волна формально не отличается от
спирали, вращающейся в активной среде вокруг отверстия или
’’дырки”.
Возникновение ревербератора обычно связано с разрывом БФ
волны. Такой разрыв может быть вызван либо исходными началь-
ными условиями, либо временной потерей возбудимости опреде-
ленного участка среды, либо отрывом возбужденной области от
огибаемого ею препятствия и т.п. При этом край плоской волны
начинает заворачиваться и образует замкнутый путь проведения
возбуждения (рис. 5.15). В области возбуждения можно выделить
линии, соответствующие фронту (жирная линия на рис. 5.15а)
и спаду БИ. Точку на плоскости, где фронт переходит в спад,
называют точкой изменения фазы (точка П на рис. 5.15). В за-
висимости от параметров среды точка изменения фазы может
либо находиться на месте (рис. 5.15а), либо двигаться по окруж-
ности (рис. 5.156), либо осуществлять периодическое движение
129
Рис. 5.16. Влияние кривизны фронта на скорость распространения области
возбуждения: устойчивого (7) н неустойчивого (2), изогнутого БИ с фрон-
том постоянной кривизны (а), направления движения края области возбуж-
дения в двумерной среде при начальных значениях радиуса, меньшем н боль-
шем критического значения (б) (97 ]
на плоскости, например, в виде ’’розетки” (рис. 5.15в). Качествен-
но возможность существования ’’розетки” показал Зыков [97],
анализируя зависимость скорости распространения волны от ее
периода.
Расчеты показывают, что размер ядра и период обращения
ревербератора обладают U-образной зависимостью от параметров
среды. Качественно описанные свойства ревербераторов могут
быть получены при рассмотрении влияния кривизны фронта волны
в двумерном пространстве на скорость распространения БИ. Из-
вестно, что чем большую кривизну имеет фронт возбуждения,
тем меньше его скорость. При некоторой критической кривизне
К = Ккр (или критическом радиусе кривизны г = гкр=К~£р)
скорость распространения возбуждения равна нулю. ПриКЖкр
фронт возбуждения движется в противоположную сторону.
Пример зависимости скорости стационарного БИ от К пока-
зан на рис. 5.16а. Физический смысл этого явления заключается
в том, что степень искривленности фронта изменяет его способ-
ность ’’поджечь” или перевести в состояние возбуждения еще
покоящуюся область пространства. Так, при увеличении кривиз-
ны фронта тот же самый диффузионный поток будет передаваться
на большее расстояние. Следовательно, порог возбуждения среды
будет превышен на меньшем расстоянии от фронта, и поэтому
скорость распространения волны снижается. Тот же процесс опре-
деляет критический размер области начального возмущения,
130
которая представляет собой неустойчивое образование с радиу-
сом R ~гкр. На рис. 5.166 эта область ограничена штриховой ли-
нией. Если начальный радиус Ro > гкр, то в дальнейшем размер
возмущенной области будет увеличиваться, а скорость фронта
с увеличением радиуса будет монотонно нарастать до величины,
равной скорости плоской волны. При Ro < гкр произойдет схло-
пывание возбужденной области.
Рассмотрим теперь, как кривизна возбужденной области может
сказаться на режимах распространения разрывов волны. Рассмот-
ренные в [147—149] процессы показаны на рис. 5.17. В первом
случае волна возбуждения огибает препятствие и нигде не отры-
вается от него. Такое поведение хорошо описывается в рамках
аксиоматической теории (рис. 5.17а). Более сложное поведение
наблюдается при отрыве волны от огибаемого ею препятствия
(рис. 5.176,в). За препятствием образуется зона, куда волна
возбуждения вообще не попадает. Такой режим возможен лишь
в средах с пониженной возбудимостью, где длина БИ уменьшается
до такого значения, что начинает сказываться кривизна фронта
возбуждения на разрыве. В третьем случае длина БИ уменьшилась
настолько, что края сформированного препятствием разрыва
Рис. 5.17. Движение края области возбуждения при огибании ею препятст-
вий: огибание без отрыва (а), огибание с частичным отрывом от препятствия
в среде с пониженной возбудимостью (б), формирование ревербератора
при отрыве области возбуждения от препятствий (в) [147], увеличение
разрыва волны в случае сильно сниженной возбудимости (г) [149] (7, 2,
3 и тд. - последовательные положения области возбуждения)
131
Рис. 5.18. Ревербератор с ’’аномальным” ядром: кольцеобразное ядро (я);
пример возбуждения внутренней области ядра ревербератора (б); соотно-
шение между размером ядра (кривая 2) и критическим размером области
(кривая 7), в которой еще может существовать ревербератор, при различ-
ных значениях параметра g характеризующего уровень возбудимости (в)
[148]
могут только расходиться (рис. 5.17г). Особый интерес вызывает
второй случай. Видно, что могут быть подобраны такие условия,
когда огибание препятствия краем возбужденной области (свое-
го рода дифракция) приведет к формированию ревербератора
(рис.5.17в).Таким образом, расчеты Панфилова и Перцева демон-
стрируют новый способ формирования ревербераторов.
В среде с не изменяющимися во времени свойствами ревербе-
ратор возбуждается только одной плоской волной. Изучение
такого ревербератора было начато несколько ранее и было пока-
зано, что его ядро имеет форму кольца, поэтому его назвали ре-
вербератором с ’’аномальным” ядром (рис. 5.18). Перцев и Пан-
филов [148] показали, что внутри ядра имеется область, которая
находится в состоянии покоя, хотя и граничит с возбужденными
участками. Наличие такой области объясняется тем, что фронт
132
возбуждения (в виде ’’языка”) в местах соприкосновения с ней
искривлен настолько, что не может распространяться к центру.
Из расчетов следует, что радиус ядра и характерный размер
ограниченной активной среды, где может крутиться ревербера-
тор, не всегда пропорциональны друг другу. Если характерный
размер среды сделать меньше некоторого критического, то ревер-
бератор сначала отклоняется от круговой траектории, а потом
уходит к границе среды и гибнет. На рис. 5.18в показаны зависи-
мости размера ядра и критического размера области, где еще
может существовать ревербератор, от коэффициента gF, характе-
ризующего наклон падающего участка функции F(x,y) (см. базо-
вую модель (2.53)). Видно, что эти характеристики сильно разли-
чаются. Поэтому используемые иногда в литературе оценки крити-
ческого размера ревербератора по радиусу его ядра нельзя считать
вполне корректными. Влияние границ среды сказывается тем мень-
ше, чем меньше длина переднего фронта БИ. Последняя по порядку
величины совпадает с размерами ядра.
Недавно в экспериментах на модельной химической реакции
Белоусова-Жаботинского было показано существование новых
типов ревербераторов, состоящих из нескольких спиралей, —
так называемых ’’многоруких” ревербераторов [2, 203].
Такие структуры называют также ревербераторами с топологи-
ческими зарядамиN> 1 (рис. 5.19) [228, 264].
Предположение о возможности существования таких структур
выдвигалось в теоретических работах (см., например, [236]).
Результаты Кринского и Агладзе [2, 203], полученные на опыте.
Рис. 5.19. Многоспиральные ревербераторы в химически активной среде
(размер кадра по горизонтали ~ 30 мм): ревербератор из двух спиралей;
интервал между кадрами Т = 4 мин (а), кинограмма ревербератора из трех
спиралей; Т= 15 с (6} [117]
133
представляют собой первое доказательство реализуемости ’’много-
руких” ревербераторов и оказались богаче теоретических пред-
сказаний. Было показано, что в большинстве случаев многоспи-
ральиые ревербераторы существуют до тех пор, пока протекает
химическая реакция (время, большее 30 мин). Этот факт свиде-
тельствует об устойчивости таких структур к возмущениям, обыч-
но присутствующим в реакциях. Редкие случаи разрушения источ-
ников АВ, по-видимому, вызваны превышением определенного
порога устойчивости ревербераторов из нескольких спиралей.
Легче всего разрушается источник из двух спиралей. Он превра-
щается через некоторое время в два источника с одной спиралью
каждый. Гораздо реже регистрировались случаи развала ’’трех-
руких” ревербераторов. Ни в одном из экспериментов не наблю-
далось разрушение четырехспирального источника. В процессе
вращения ’’четырехрукого” источника наблюдается попеременное
замыкание и размыкание спиралей. Причины, вызывающие такое
взаимодействие спиралей, а также механизмы, определяющие
пороговую устойчивость этих многоэлементных нелинейных струк-
тур, в настоящее время еще не объяснены.
ГЛАВА 6
СИНХРОНИЗАЦИЯ АВТОКОЛЕБАНИЙ В ПРОСТРАНСТВЕ
КАК ФАКТОР САМООРГАНИЗАЦИИ
Одним из факторов самоорганизации в распределенных автоко-
лебательных системах или же в коллективах связанных между
собой дискретных автоколебательных систем самой разной при-
роды является способность таких объектов к взаимной синхро-
низации. Под синхронизацией понимают самопроизвольное уста-
новление в системе автоколебаний единой синхронной частоты и
устойчивых к возмущениям определенных фазовых отношений
между колебаниями в отдельных частях неоднородной распреде-
ленной системы или же в парциальных дискретных автогенерато-
рах. Тенденция к взаимной синхронизации противоположна тенден-
ции к появлению хаоса. Иногда в одной и той же сложной системе
при одних условиях (в частности, внутренних связях) побеждает
тенденция к самоорганизации, а при других условиях рождаются
квазистохастические режимы.
Проблеме синхронизации посвящено много монографий и
обзоров [37, 129, 163]. В нашей книге мы рассмотрим синхрони-
зацию под определенным углом зрения, а именно как важный
режим поведения АВ-системы.
Запишем двухкомпонентную модель неоднородной системы
в общем виде:
Эх
— = P(x,y,r) + D.
Эу
— eC(x,y,r) + Pj
bt
д2х
д^’
Э2У
Эг2 '
(6-1)
Если систему разбить на N отсеков, то ее дискретным аналогом
будут уравнения (3.9), где Fi=P и F2=Q зависят от парамет-
ров г, di = dxnd2 = dy. Свойства АВ-системы определяются свойст-
вами соответствующих точечных систем. Подробный анализ подоб-
ных моделей содержится в [163]. Ниже мы коснемся лишь неко-
торых проблем теории синхронизации и в том числе важной проб-
лемы о стохастиэации системы связанных генераторов.
135
6.1. Фазировка автоколебаний в однородных системах
Пусть в модели (6.1) функции Р и Q не зависят от координа-
ты г. Тогда распределенную систему можно представить как конти-
нуум совершенно одинаковых парциальных автоколебательных
систем, связанных между собой диффузионными связями.
На первый взгляд кажется, что в таких однородных системах
всегда устанавливается синхронный режим автоколебаний (если,
конечно, не учитывать действия внутренних и внешних шумов).
Однако это далеко не всегда так. Если в двухкомпонентных актив-
ных средах при малых связях единственно устойчивым режимом
будут синфазные автоколебания с единой синхронной частотой,
то в трехкомпонентных средах, как было показано в § 4.5, уже
возможны более сложные режимы.
Подчеркнем нетривиальность утверждения об устойчивости
стационарного режима в системах второго порядка. Дело в том,
что в цикле работ [155, 163] показано, что помимо синфазных
автоколебаний имеются решения вида
y(r,t)=A(r)cos[ut + ip(r)], (6.2)
в которых амплитуда и фаза являются функциями координаты.
Однако все такие решения, кроме А = const и = const, оказы-
ваются неустойчивыми. Покажем это на нетривиальном примере
АВ-системы, которая строится на основе точечного почти гармо-
нического генератора с жестким возбуждением [163]. В этом
случае в модели (6.1) Р и Q принимают вид
Р(х,у) « у, Q(x,y) = -ш^х — 2(5О-62х2 + S4*4)Z (6.3)
Посмотрим, как будет вести себя дискретный аналог такой сис-
темы. Во-первых, возможны два простейших режима: a) Ai = 0;
это значит, что все генераторы не возбуждены и находятся в устой-
чивом равновесии; б) А2 = const > 0; при этом все генераторы
возбуждены и имеют амплитуды, близкие к устойчивому предель-
ному циклу точечного генератора. Во-вторых, можно возбудить
лишь часть генераторов, например левую половину цепочки. Тогда
в невозбужденных генераторах правой половины цепочки будут
происходить вынужденные колебания около устойчивого поло-
жения равновесия. При малой связи амплитуда вынужденных
колебаний будет меньше, чем амплитуда неустойчивого предель-
ного цикла. В итоге распределение амплитуд вдоль цепочки А3(г)
будет ступенеобразной функцией, устойчивой к малым возмуще-
ниям. Если число N генераторов в цепочке увеличивать, то коэф-
фициенты связи dx и dy, а также амплитуды вынужденных коле-
баний при неизменных коэффициентах диффузии будут увели-
чиваться. Можно ожидать, что в пределе при переходе от дискрет-
136
ной цепочки к ее непрерывному аналогу граница между возбуж-
денными и невозбужденными генераторами будет стираться, т.е.
распределение А3(г) в виде ступеньки становится неустойчивым.
Любые возмущения могут сдвинуть ступеньку вправо или влево.
Были получены распределения А (г) непосредственно для моделей
в частных производных. При этом для стационарных амплитуды
и фазы укороченные уравнения второго приближения имеют вид
d2A
dr2
( dp\2
+ Л ГТ =е/(А)+...,
\dr /
d / dy \
— [А2 — 1= е2Л2Ф(А) + . ..
dr \ dr /
(6.4)
Здесь е ~ Ь/ (Dx + Dy), а соответствующие непроницаемым торцам
граничные условия задаются равенствами
dtp dtp dA dA
dr r = o dr r=L dr r=o dr r= i.
(6.5)
В первом приближении <p = const и уравнение для амплитуды
упрощается. Для жесткого возбуждения (см, (6.3)) имеем
d2A
dr2
2
Dx + Dy
/ 1 , 1 Л
Л1б0 - - + - W I.
\ 4 8 /
(6-6)
Качественный анализ решений этого уравнения (а они в прин-
ципе могут быть выражены через эллиптические интегралы) и
машинный эксперимент показывают, что все они неустойчивы,
за исключением тривиальных: А, ^0 и Аг = const. Анализируя
уравнения второго приближения, можно получить решения А3(г),
близкие к ступенеобразному, но они оказываются неустойчивы-
ми. Математические стороны этой проблемы отражены в [69, 207].
6.2. Синхронизация в неоднородных системах.
Случай эквидистантных расстроек
Любые реальные АВ-системы и их дискретные аналоги — сети
связанных между собой генераторов имеют разброс параметров,
приводящий к появлению различных парциальных частот автоко-
лебаний. В каждой такой системе имеются источники внутренних
(естественных) и внешних шумов. Если связи между генератора-
ми малы, неоднородность системы и шумы приводят к нарушению
синхронных режимов. С другой стороны, чем теснее связи между
генераторами в сети, чем больше размерность этой сети, тем устой-
чивее синхронный режим. Более того, можно сказать, что флук-
137
туации синхронной частоты уменьшаются при увеличении упомяну-
тых факторов связи, а полоса синхронизации увеличивается.
Если парциальные автоколебательные системы квазигармоничес-
кие, Аj = const, а коэффициенты связи dx и dy малы, то синхрон-
ная частота wc, полоса синхронизации Дс и стационарные разности
фаз в i =ip/+i —tpi в цепочке из N генераторов определяются
следующими равенствами [163]:
1 АГ
W 2 = - S w2 Дс = (dx + dyjfi (w f),
_ ” f=1l (6.7)
sin = ------— /2(Wi - wc) (i = 1,2,... ,N - 1).
dx + dy
Здесь w/ — частоты автоколебаний парциальных систем, а функции
/1 (w,) и/2 (cd,-) определяются распределением этих частот.
При увеличении инкремента парциальных автоколебательных
систем форма колебаний становится релаксационной, а коэф-
фициенты связи dx и dy уже не являются равноправными. Пусть
степень релаксационности характеризуется параметром ерел < 1.
Тогда выражение для полосы синхронизации приобретает вид
Ac (dxlepen + ерел ^y)/i(wi). (6.8)
При этом dx определяет связь по медленной переменной, не имею-
щей разрывов, a dy — связь по быстрой переменной. Из (6-8)
следует, что полоса синхронизации Дс увеличивается в ер*л раз
при связи по медленной переменной и, наоборот, сужается при
осуществлении связи лишь по быстрой переменной. В следующем
параграфе будет рассмотрен случай, когда в релаксационной АВ-
системе при dx = 0 и dy Ф 0 наступает десинхронизация автоколеба-
ний в пространстве (при этом Дс -+0, если ерел < 1).
Отсылая интересующихся читателей к упомянутым моногра-
фиям, где рассмотрены различные примеры синхронизации в сетях
автогенераторов с диффузионными связями, остановимся на одном
важном для нашего изложения, ранее не рассмотренном случае
эквидистантного распределения парциальных частот в цепочке
автогенераторов. Будем для простоты считать, что амплитуды всех
генераторов равны между собой, а парциальные частоты заданы
в виде
w,- = w0 + 4(/ - 1) (/ = 1,2, 3,. .., N), (6.9)
где wo ~ частота первого генератора, А — расстройка между сосед-
ними генераторами. Будем также считать, что генераторы суть сис-
темы Ван-дер-Поля с мягким режимом возбуждения. Это значит,
что в (6.1) функций Р и Q равны
P-у, Q= 26(1 - 62у2)у - w2x. (6.10)
138
Такой вид Р и Q существенно не ограничивает общности ре-
зультатов [163]. Будем искать решения в виде
xt = Ai(t) cos [wct + ,
У! = - wcA,(r)sin [wct + (Г)], (6.11)
где Ai(t) и >Pi(f) — медленно меняющиеся функции времени.
При А,- = const для pt и для разностей фаз вк = ^fc+1 — >рк получает-
ся следующая система укороченных уравнений:
dtpi
— = K(c?x + dy) sin в t + (wc - w0),
ddi
-----= Vi(dx +dy) (-2 sin 0, + sin 02) + Д,
d0fc
------= Vi(dx + cL,)(sin 0fc_j - 2 sin 0fe + sin 0fc+I) + Д, (6.12)
dt
ddff_i
----= yi(dx +dy)(sin 6N_2 - 2 sin eN_i) + Д.
Найдем из этой системы стационарные разности фаз 0 синхрон-
ную частоту wc и полосу синхронизации Дс,те.конкретизируем
выражения (6.7) для случая эквидистантных частот. Полагая
dd i/dt = 0, получим
2Д
IIМк/ II | sin 0 к II = - -, (6.13)
c?x +dy
где элементы матрицы Mkj =0, кроме Мкк = — 2, Мк_х<к = \,
Мк>к+1 = 1, откуда
д
sin0fe = -------(k2-Nk) (k,j=\,2,...,N -\). (6.14)
Максимальный сдвиг фаз наблюдается посередине цепочки при
к = N/2. Сдвиг фаз между крайними генераторами на обоих концах
цепочки такой же, как и между двумя диффузионно связанными
генераторами. Раз в период вдоль цепочки будет пробегать фазовая
волна, так что xt будут достигать максимальных значений пооче-
редно. Волна будет двигаться быстрее по краям цепочки и медлен-
нее посередине.
Полоса синхронизации Дс, или минимальная расстройка, при
которой распределение установившихся разностей фаз устойчиво,
139
находится с помощью условия I sin в к I = 1, при этом
Дс = max
fcG [ i ,N-1 ]
dx+dy 4(dx+dy)
A = max —-----— ~---------
k2 — Nk
N2
(6.15)
Заметим, что если TV =2 (всего два связанных генератора), то
ДС®»(2Х + dy. Для цепочки Дс тем меньше, чем больше N. При
этом наиболее ’’слабое звено — это средние генераторы цепочки.
При флуктуациях именно посередине синхронный режим будет
разрушаться, и при этом вероятно, что цепочка разобьется на два
синхронных подкластера.
Синхронная частота
wc= —~ [ S (ш0+ЛД)2] */2. (6.16)
\]п к=0
При Ди < Шо
Д
----(7V-1) ,
2ш0
(6.17)
тл. шс равна среднеарифметическому значению парциальных
частот.
При выводе соотношений, определяющих область синхрониза-
ции (6.15) — (6.17), использовались два основных предположения:
1) постоянство амплитуд колебаний вдоль цепочки; 2) малость
нелинейности системы, что обусловливает квазигармонический
характер колебаний. Это, конечно, ограничивает точность соотно-
шений. Для проверки их применимости в различных ситуациях
были проведены численные эксперименты. Система уравнений
(6.1) интегрировалась на ЭВМ методом конечных разностей.
Прежде чем указать основные полученные результаты, полезно
упомянуть, что АВ-система с плавным градиентом собственных
частот является моделью так называемой медленноволновой
активности перистальтических органов желудочно-кишечного трак-
та (см. гл. 9). Подчеркнем, что основной интерес представляет
организация несинхронных режимов. Остановимся на этих режи-
мах, а затем обсудим применимость (6.15) —(6.17).
Профили распределений переменной х в последовательные мо-
менты времени показаны на рис. 6.1. К моменту переходные
процессы можно считать завершившимися. Как видно, в системе
распространяются бегущие волны в направлении противоположном
направлению градиента собственных частот локальных генерато-
ров. Амплитуды колебаний распределены примерно равномерно.
Длины волн возрастают в области меньших частот. Вообще говоря,
уже из этой картины видно, что процесс является несинхронным
(отметим, что Дсо>шс). Однако значительно более наглядно
140
Рис. 6.1. Профили распределения переменной х в последовательные момен-
ты времени (8 = 2; 62 = 1; Dxx = Dyy =0,001) [73]
режим десинхронизации выявляется при спектральной обработке
полученных решений. Распределение амплитуд гармонических
составляющих энергетических спектров колебаний вдоль системы
представлено на рис. 6.2 (рис. 6.2а соответствует рис. 6.1). Основ-
ной особенностью представленных распределений является наличие
ярко выраженных кластеров. Колебания происходят не на всех
возможных в системе частотах, но только на некоторых, характер-
ных для выделяемых кластеров. Суммарный спектр колебаний
из непрерывного в случае отсутствия связи (dxx = dyy = 0) пере-
ходит в дискретный. Причем по мере увеличения коэффициентов
связи число кластеров уменьшается (рис. 6.2а,б), в пределе стано-
вясь равным единице (область синхронизации).
141
Рис. 6.2. Пространственное распределение для гармоник спектра автоколеба-
ний с постоянным градиентом собственных частот. Время определения -
порядка ста периодов - соответствует рис. 6.1 (а); то же, но Dxx = Dyy =
= 0,01 (б); 6 =0,3, 8, =1, ш(г) =3,14+ (3,14/2) (1 -г), Dxx=Dyy =0,001
(в) (цифры - циклическая частота гармоники) [73]
Важно заметить, что поведение системы существенно зависит
от степени ее релаксационности. В случае слабой нелинейности
(рис. 6.2в) образуются области, в которых колебания практически
отсутствуют. Для больших нелинейностей подобные явления имеют
место при значительно больших градиентах собственных частот.
В любом случае при наличии подобных эффектов использование
приближения "постоянной амплитуды” приводит к качествен-
142
ным ошибкам. Отметим также, что область синхронизации при
увеличении нелинейности системы существенно растет по срав-
нению с определяемой по (6.15). Здесь возможны уточнения сог-
ласно формуле (63). В то же время определение ыс по (6.17)
дает хорошие совпадения с численным экспериментом, Более
того, wc для кластеров также определяются формулой (6.17),
где Awt = = Да>/£ (к - число кластеров), или, с другой сто-
роны, число кластеров можно оценивать из соотношения к*
~Дтах/Дсиз (6.15).
63. Сложные автоволновые режимы,
возникающие при нарушении синхронизации
При нарушении синхронного режима в распределенной автоколе-
бательной системе возможно образование различных пространст-
венных структур фазировки или синхронизации, а также возник-
новение стохастических режимов. Эти процессы интенсивно изу-
чаются в настоящее время, поэтому здесь будут кратко отмечены
лишь основные, на наш взгляд, направления исследований.
Весьма интересным представляется изучение процессов формиро-
вания структур при пространственной расфазировке в однород-
ной автоколебательной системе. В зависимости от особенностей
релаксационных колебаний в ”гочечной системе” возможны совер-
шенно различные пространственно-временные режимы системы.
Так, например, в случае, когда медленные движения имеют отри-
цательное ускорение, происходит выравнивание начальной неодно-
родности фаз автоколебаний в пространстве. Если же свойства
системы такие, что медленные движения имеют положительное
ускорение, то фазовые сдвиги колебаний в разных точках прост-
ранства начинают нарастать..В зависимости от вида нелинейных
функций возможны два типа переходных процессов. Один из них
связан с образованием ’’ячеистого” распределения по медленной
переменной, которое как целое совершает небольшие колебания.
Быстрая переменная совершает при этом синхронные автоколеба-
ния (рис. 63а). Другой тип переходного процесса связан с разру-
шением однородного распределения фаз и переходом в автоколе-
бательной системе к неоднородному стационарному распределе-
нию с ’’ячеистой” структурой по обеим переменным х и у
(рис. 6.36). Такой процесс представляет собой пример образова-
ния контрастных диссипативных структур (см. гл. 7) за счет S-
образной зависимости нагрузочной характеристики 0(х,у) =0
для медленной переменной. Пример существования таких стацио-
нарных структур в автоколебательной системе рассматривался
в § 3.2. Численные расчеты показывают, что в автоколебательной
143
Рис. 6.3. Процессы установления в однородной автоколебательной системе.
а - Фазировка колебаний по быстрой и медленной переменным (7 = 1,5;
0 = 2,7). б - Фазировка колебаний по быстрой переменной и формирование
’’ячеистого” распределения по медленной переменной (7 = 2; 0 = 2,7). в -
Формирование стационарного распределения (ДС) (7 =3; 0 = 2,7). Нуль-
изоклины для соответствующих параметров показаны сверху
системе с неустойчивым однородным распределением фаз могут
формироваться устойчивые структуры, не изменяющиеся со вре-
менем. На рис. 63 пространственно-временные движения при фор-
мировании разного типа структур показаны на плоскости г, г.
Эти рисунки строились следующим образом. Были выбраны по-
роговые значения уПОр =уКр и хпор =л’0>пор) (на падающем
участке нуль-изоклины Р (х,укр) =0). Там, где х>хПор> участки
плоскости r,t заштрихованы. Местоположение БФ быстрой пере-
менной показано сплошной линией, а Упор =Укр — штриховой.
Области, в которых медленная переменная принимает значения,
большие порогового, выделены точками. Светлые области на плос-
кости г, t соответствуют х и у, не достигшим пороговых значений.
Отметим, что ’’сложность’’описанных здесь режимов расфазировки
в значительной мере зависит от формы начального возмущения.
144
При этом важно учитывать соотношение между временем наблю-
дения и временем переходного процесса. Если наблюдение за сис-
темой ведется в течение времени, меньшего, чем продолжитель-
ность сложного переходного процесса, то этот процесс может вос-
приниматься как квазистохастическое движение.
Возможность действительно стохастических колебаний в релак-
сационных системах была показана в работе Сбитнева [168] на при-
мере двух связанных осцилляторов. Сначала был найден, такой
интервал параметров однородной системы, в котором не исчезали
неоднородности в начальных условиях. Он соответствовал области
между квазилинейными и релаксационными колебаниями. После
этого были исследованы режимы взаимодействующих осциллято-
ров в неоднородной системе. Оказалось, что в зависимости от
расстройки собственных частот возможны режимы синхронизации,
биений, многомодовые режимы, стохастичность. Результаты работы
[168] показывают, что существование сложных режимов, в част-
ности стохастичности, связано и с нарастанием начальных неодно-
родностей фаз колебаний, и с перемешиванием начальных фаз из-за
неоднородности системы. Аналогичные расчеты проводились в
работах [9,261,152].
В них в основном с помошью численных расчетов было показано
существование сложных и стохастических движений в системах
связанных автогенераторов.
Для количественной оценки степени стохастичности движений
в системе используется обычно либо энтропия Колмогорова —
Синая, либо дробная размерность аттрактора (см., например,
[9, 111, 157]). В то же время для описания структур в распре-
деленных системах Гапоновым-Греховым и Рабиновичем [226]
был предложен критерий — уровень порядка.
Известно, что каждой нелинейной структуре может быть пос-
тавлен в соответствие математический образ в виде аттрактора
в некотором адекватном фазовом пространстве. Исходя из этого,
в качестве параметра степени стохастичности или уровня порядка
Р было предложено использовать следующее выражение:
P = (6.18)
Здесь т — размерность фазового пространства, D — дробная размер-
ность аттрактора. Такими аттракторами являются предельные мно-
жества: состояние равновесия (D = 0), предельный цикл (D=l),
эргодическая намотка Af-мерного тора (D = M), странный аттрак-
тор^ — нецелое число). Если D приближается к т то в
системе реализуется случай наиболее неупорядоченной струк-
туры. При этом Р стремится к нулю. Если же при достаточно боль-
шом т размерность аттрактора только немногим больше двух
(траектории аттрактора локализованы в тонком слое около не-
145
которой поверхности), то это означает, что большая часть перемен-
ных в системе с достаточной точностью связаны между собой оп-
ределенными алгебраическими отношениями. Степень порядка в
этом случае весьма велика На первый взгляд в определе-
нии величины Р имеется значительный произвол — увеличение
детальности описания системы влечет за собой увеличение числа
степеней свободы тп и, следовательно, размерности фазового прост-
ранства D. При этом степень упорядоченности конкретной структу-
ры может быть доведена до предельно высокой величины 1).
Этот произвол, однако, кажущийся, так как в число независимых
переменных следует включать лишь те переменные, связь между
которыми быстро не релаксирует к алгебраической. Если же на
временах, существенно меньших времени установления структуры,
между отдельными переменными устанавливается алгебраическая
связь, то их априори следует считать зависимыми.
По-видимому, использование параметра Р будет наиболее инфор-
мативным при рассмотрении переходов типа ”хаос-хаос” (см.,
например, работы [16, Д4]).
В последние годы достаточно подробно исследовались условия
возникновения сложных режимов в активных квазигармонических
системах [11, 15, 17, 60]. В частности, в ансамбле динамических
структур, описываемых дискретным аналогом уравнения Гинзбур-
га-Ландау, были исследованы процессы, связанные с развитием
хаоса. Было показано существование области параметров, где
все движения в виде стационарных бегущих волн неустойчивы и
реализуются достаточно сложные переходные режимы либо хао-
тические движения, образом которых служит многомерный стран-
ный аттрактор [11, Д5, Д2]. При этом оказалось, что оценить раз-
мерность такого аттрактора можно по числу неустойчивых стацио-
нарных волн в системе: чем больше неустойчивых стационарных
волн, тем больше размерность хаоса [Д1, Д2,11].
6.4. Синхронные сети автогенераторов
в современной радиоэлектронике
Мы живем в век микроминиатюризации аппаратуры в радио-
электронике. Это значит, что на очень малых ”погонных” площа-
дях (доли мм2) конструкторы могут сосредоточить большое
число (сотни и даже тысячи) простейших элементов (см., напри-
мер, [Д4]). В частности, такими элементами являются полупровод-
никовые генераторы, а также контакты Джозефсона. Последние
генерируют колебания в мм- и см-даапазонах при гелиевой тем-
пературе. Во всех случаях конструкторы должны решить следую-
щие задачи: 1. Для получения достаточной мошности генераторы
146
должны быть объединены в синхронные сети, работающие на об-
щую нагрузку. При этом мощность увеличивается пропорциональ-
но числу генераторов N. 2. Соответственно, сеть должна иметь вы-
ходное сопротивление, которое может быть согласовано с нагру-
зочным сопротивлением. 3. Обычно микроминиатюризация свя-
зана с большим разбросом параметров отдельных элементов и,
в частности, разбросом парциальных частот автоколебаний, кото‘
рый должен быть сведен к минимуму.
Если обеспечить работу генераторов в режиме самосинхрониза-
ции, то все перечисленные проблемы могут быть решены одно-
временно. Дополнительным выигрышем при этом является увели-
чение стабильности частоты самосинхронизованного коллектива N
автогенераторов. Стабильность частоты увеличивается пропорцио-
нально л/У [104,135,136]. Если требуется еше больше сузить
полосу генерации, то в сеть вводится дополнительный генератор
особо стабильной частоты. Достаточно полно теория самосинхро-
низации ансамблей генераторов, используемых в передающих уст-
ройствах, рассмотрена в [68].
Разносторонние исследования управляемых связанных генера-
торов в активных структурах представлены в работе [75]. Зада-
чи управления спектром колебаний ансамбля генераторов, иссле-
дование многочастотных процессов, условий перехода к одночас-
тотным автономным и неавтономным режимам потребовали раз-
работки новых методов исследования. В частности, целесообраз-
ным- оказалось изучение элемента объемной структуры, состоя-
щего из четырех генераторов, связанных двенадцатью однонаправ-
ленными каналами "каждый со всеми”. Такой элемент позволяет
исследовать более простые и разнообразные случаи связи. Важно,
что генераторы могут быть разных типов, а способ их изучения —
машинный эксперимент. Интересный результат получен, когда у
трех из генераторов параметры фиксированы, а четвертый генера-
тор может перестраиваться по частоте. В этом случае существует
несимметрия зависимостей областей синхронного режима от коэф-
фициентов связей di4 и о?4/. Для di4 ширина полосы одночастотно-
го режима равна ширине полосы внешней синхронизации трех ге-
нераторов четвертым. По мере увеличения diA при резистивном ха-
рактере связи ширина синхронных частот практически не изме-
няется. В то же время полоса синхронизации расширяется и может
стать на порядок больше ширины полосы изменения синхронных
частот. Таким образом, изменяя только параметры di4, можно вво-
дить в синхронный режим все более далекие по парциальным час-
тотам генераторы. Аналогичные зависимости получены и для двух-
частотных режимов. Важно, что из четырехзвенных элементов в
дальнейшем можно строить модели сложных распределенных
147
автоколебательных систем, имеющих различные виды ведущих
центров. Кроме того, на основе сетей генераторов возможно пост-
роение систем, обеспечивающих сфазированные в пространстве
когерентно излучающие антенны. Дворников и Уткин [68] пред-
лагают объединить генераторы в блоки, которые в свою очередь
могут быть объединены в сети.
Чрезвычайно перспективным представляется использование се-
тей, объединяющих сотни контактов Джозефсона [131]. Эти кон-
такты представляют собой мостики, образующиеся между двумя
тонкими сверхпроводящими пленками, например из свинца или
ниобия. В перспективе возможно использование туннельных пере-
ходов, которые могут быть образованы между пленками. Уже
созданы синхронизованные по фазе устройства, представляющие
собой цепочки из ста и более джозефсоновских генераторов. Ос-
новной вопрос,, который решается при конструировании таких
систем, - это выбор оптимальных связей между элементами. Воз-
можно объединение контактов и в двумерную сеть. Фазовая син-
хронизация при этом осуществляется с помощью волны, распростра-
няющейся в такой сети. Заметим, что укороченные уравнения для
разностей фаз в сетях джозефсоновских контактов аналогичны
тем, которые рассматривались в § 6.2.
ГЛАВА 7
СТАЦИОНАРНЫЕ ПРОСТРАНСТВЕННО
НЕОДНОРОДНЫЕ СОСТОЯНИЯ.
ДИССИПАТИВНЫЕ СТРУКТУРЫ
Впервые на спонтанное разрушение симметрии и возникнове-
ние стационарных структур в однородных по пространству систе-
мах с локальными положительными обратными связями (1.1) -
(1.3) указал Тьюринг в своей основополагающей работе [260],
посвященной одной из наиболее фундаментальных проблем биоло-
гии развития — морфогенезу. Его работа так и называлась ’’Хими-
ческие основы морфогенеза”. В середине шестидесятых годов
исследования таких структур были продолжены Брюссельской
школой И. Пригожина [62, 145]. Здесь они получили название
’’диссипативные структуры” (ДС), которое подчеркивает термоди-
намический аспект проблемы: они существуют за счет притока
энергии и вещества из внешней среды и их диссипации внутри
системы. Последние десять лет разнообразные аспекты теории ДС
и ее приложений исследуются в нашей стране и за рубежом [33, 51,
71, 107, 108, 163].
Теория ДС находит применение во многих областях науки.
В физике уже созданы и обсуждаются модели конкретных объек-
тов (см., например, работы Кернера и Осипова [107, 108]). В био-
логии, несмотря на значительно более длинную историю вопроса,
обсуждение до сих пор ведется на уровне ’’идей”, но не моделиро-
вания конкретных систем [33, 50, 138]. Как нам представляется,
до сих пор основную роль играют качественные результаты теории
ДС, которым и посвящается настоящая глава.
7.1. Условия существования стационарных неоднородных решений
Как уже неоднократно отмечалось, анализ простейших дискрет-
ных моделей представляет важные сведения о характере АВП и
вместе с тем весьма нагляден и прост. Поэтому здесь отдано пред-
почтение изучению условий существования ДС на таких моделях
[45]. Приводимая схема рассуждений переносится строгим обра-
зом на распределенные модели, но требует от читателя знаний
функционального анализа [54].
149
Перепишем уравнения простейшей дискретной модели (§ 3.4 и
5.4) в нормальных координатах (3.10):
Д,=ГдД$), S,=Fs.(X$), (/=1,2,.. ,п), (7.1)
где Д, и Sf - производные по времени, Д, = (*х, - 2х,)/2, S, =
= (*xf+2х,)/2,/х/- переменные в /-м отсеке (/= 1, 2), приведен-
ные к особой точке точечных уравнений, — преобразованные
функции точечной кинетики/*} (1.5).
В отношении вида функций/*} необходимо сделать естественное
предположение о их ’’физической реализуемости”: точечная систе-
ма с такими /*}(*) не должна иметь неограниченно возрастающих
решений. Более строго, функции Ff(x) должны обеспечивать суще-
ствование сепарабельных поверхностей таких, что интегральные
кривые с начальными точками внутри определенного объема
при любых t не выйдут за его пределы. Поскольку внутри
этого объема должна находиться одна т-я особая точка, то
можно говорить о физической реализуемости соответствующих
моделей в области фазового пространства с центром в т-й
особой точке.
Сформулируем основное утверждение настоящего параграфа.
Достаточным условием существования стационарных ДС (Д, ¥= 0)
для модели (7.1) с физически реализуемой кинетикой/*} является
ДС-неустойчивость (§ 3.2) тривиального решения (Д,- = = 0),
иначе говоря, отрицательность свободного члена характеристиче-
ского уравнения (3.5). Это условие во многом аналогично требова-
нию для триггерных точечных систем: £о(0)<0 - условию ’’седло-
образности” особой точки. Приведем основные пункты доказагель-
ства сформулированного достаточного условия.
Рассмотрим Д,, 5}-и 5} как неявные функции от Д,, опре-
деляемые уравнениями Д, = 0, S, = 0 и 5, = 0. Выражение для пол-
ной производной Д, по Д, имеет вид
с?Д, " /9Fa. ЭД, Э/*}$. 9S.- \
—- = S I ——- +—^ — 1, (7.2)
с?Д, / = 1\ЭД, ЭД| 95, ЭД,/
или, после соответствующих подстановок,
_/Д(^д, > • • • , Fsn)\
ЭД, \О(Д1,...,Д„;51.........5„) /
X ( ’ • • • + !’•*•> ^sw)\ /73)
\/)(Д1,..., Д,_1; Д,+1,..., 5„) /
150
В точке Д/я5/в0 якобианы в выражении (7.3) состоят из
элементов матрицы линеаризованной системы (3.4) :
dAf_det{Mf/-2df/)
d^"
где в знаменателе стоит минор //-го элемента матрицы линеаризо-
ванной системы.
Если /-я переменная выбрана так, что единственная положитель-
ная обратная связь оказывается разорванной при "замораживании”
этой переменной, то с/Д,/</Дг | _ 0 > О только тогда, когда
свободный член характеристического уравнения отрицателен.
В частности, при и = 2 минор равен Мц — 2с/н(/ ¥= /), и он отрица-
телен в системе с одним автокатализом. Существование значений
Д( > 0 (< 0), для которых выполняется условие /*’Д/(Д<) = Д, < 0
(> 0), гарантируется условием физической реализуемости на Ft(x).
Функция Дг(Д() является непрерывной по Д(, если непрерывны все
частные производные dFjldxj (i,j = 1,...,и). Более того, разрыв,
разомкнутость цепи положительной обратной связи, обеспечивает
однозначность функции Д/(Д/). Итак, а) функция Дг(Дг) непре-
рывна; б) если <?о(2) < 0, то с/Д,/с/Дг |Д/=0 > 0; в) при некото-
рых Дг > 0(< 0) выполняется Д( < 0 (> 0). Следовательно,
на интервале Дг > 0 эта функция принимает хотя бы одно
нулевое значение, т.е. имеется нетривиальный корень уравнения
2W=o.
Если в точечной системе имеется более одной положительной
обратной связи (либо в качестве l-й переменной выбрать
неавто-(и = 2) или кросскаталитическую (и> 3) переменную), то
график функции Д|(Д|) отличается от рассмотренного случая.
Пусть/-я переменная является автокаталитической и (Мц — 2dц) >
> 0. Тогда существует такое значение Д;, при котором d&ild&j ~ 0.
Это можно показать, продифференцировав равенство F^ = 0 и
использовав условие физической реализуемости. При этом значе-
нии Д( в (7.2) di^ild^i -+00 и на графике Дг(Д;) возникает точка
поворота. В частности, если {Мц — 2dtj} п > 0 и det { Му — 2dy} >
>0, то d&ijd&t |дг=0 = 0. Однако при этом из-за наличия точки
поворота ветвь графика Д^Д,) уходит во второй квадрант и суще-
ствование нетривиальных решений уравнения Д,(Д,) = 0 не гаран-
тируется. Обратно, пр и <7 о (2) < 0 и наличии точки поворота сущест-
вование хотя бы одного нетривиального решения гарантируется.
Этим исчерпывается доказательство достаточности сформулирован-
ного условия существования.
151
Рис. 7.1. Условия существования стационарных неоднородных решений.
Зависимость А ^(Д*); х является автокаталитической переменной; штрихо-
вая линия отвечает случаю физически нереализуемой системы («); зависи-
мость Ку (Ду) (б)
Рис. 7.2. Жесткое (вив) и мягкое (б и г) возбуждения ДС в дискретной
модели ’брюсселятор ” (2.54): А = 10; dx = 4, dy = 5. (в); 4 = 1, dx = 0,
dv = 1 (г)
Простейшие типы зависимости Aj(Aj) показаны на рис. 7.1.
Конечно, возможны и более сложные виды такой зависимости, как
например, возможно появление точек поворота на втором и четвер-
том октантах графика рис. 7.1а. Не останавливаясь более на общих
рассуждениях, проиллюстрируем основные положения на примерах
конкретных моделей.
Пример 1. Рассмотрим брюсселятор. Полученные условия
существования ДС для него являются только достаточными.
Проиллюстрируем это положение на примере модели ’’брюсселя-
тор” (2.54). Стационарные неоднородные решения в случае двух
152
’’ящиков” могут быть найдены из уравнений (для простоты, здесь
dif = 0,
(Д’ )’ - (Д’)(2Л 2 - 2dyy - В/к2) +A2q0(T)/(2K.dyy) = О,
(7 5)
Д>, = -к2ДЛ, £_>, = (Д2)(2А2к2-В/Л)/(42 + Д2), Sx=0,
где к2 =(1 + 2dxx)/(2dyy), g0(2) = 2dy(B - Вкр), Вкр = } +А2к2 +
+ ^dxx. __
Если А> 2\Jdyy и qo(2) >,0, то имеются два решения, Д*х > О
и Д*2 >0 (рис. 7.2а, в). Следовательно, неоднородные стационар-
ные состояния могут существовать, когда условия ДС-неустойчи-
востИчне выполнены, т.е. не являются необходимыми. Конечно, при
<?о(2)>'0 однородное состояние остается устойчивым и ДС возни-
кают в ’’жестком” режиме в результате больших возмущений.
Если А < 2\j'dyy, то решения (7.5) существуют только при
выполнении условия ДС-неустойчивости Qo(2)< 0 (рис. 7.26, г).
Сравнение ’’диаграмм состояний” (рис. 7.2в, г) показывает, что
они имеют главное общее свойство: в точке ДКр3 (ответвления
неоднородного решения) в обоих случаях происходит потеря
устойчивости однородного решения. Однако возможно появление
на ’’диаграммах состояний” отдельных ветвей, не связанных с
однородным состоянием.
П р и м е р 2. Пусть система состоит из генераторов Ван-дер-Поля
с жестким возбуждением автоколебаний:
d d
— х = -у - 8,х + 63х3 - 6$х5, —у=х. (7.6)
dt dt
Условия ДС-неустойчивости не могут выполняться ни при каких
положительных значениях параметров системы (<?о(2) = 1+ 261С?^ +
+ dyy > 0). В то же время, как легко убедиться подстановкой
(7.6) в простейшую дискретную модель (7.1), стационарные
неоднородные решения существуют.
Пример 3. Рассмотрим систему с физически нереализуемой
точечной кинетикой. Важно подчеркнуть роль требования физиче-
ской реализуемости кинетики в формулировке условий существо-
вания ДС. Система имеет следующий вид:
d d
— х=у+А1х + А1х2, —у =BiX+В2у. (7.7)
Такая кинетика не может быть реализована ни при каких значениях
параметров модели. Опустим простые выкладки и укажем лишь
основные результаты. Неоднородные стационарные решения в
системе двух ’’ящиков” существуют даже при таком выборе
знаков А1,А2,В1,В2, когда система не является активной и
ДС-неустойчивость вообще невозможна. С другой стороны, в слу-
153
чае таких А и В, когда ДС-неустойчивость может иметь место, еще
не гарантируется существование решений типа ДС. Конечно, модель
(7.7) является довольно-таки экзотичной, но она наглядно показы-
вает, что не любое формальное стационарное неоднородное решение
можно рассматривать в качестве образа ДС, так как оно может
быть не связано с активными свойствами системы. Критерием
’’формальности” решения является наличие изображающих точек
в областях физически нереализуемых траекторий фазового прост-
ранства точечной системы. Исследования этих решений могут
давать абсурдные для теории ДС результаты.
Пример 4. Обсудим условие существования для границы
первого рода. Модель из двух ’’ящиков” является аналогом второй
краевой задачи (непроницаемые торцы) (1.4). Для первой краевой
задачи следует рассматривать не менее трех ’’ящиков”, в крайних
’’ящиках” следует зафиксировать значения переменных, например,
для пространственно однородных задач следует положить 'х, =
= 3Х;- -xt (i = 1,.. . , и). В этом случае также можно показать, что
имеют силу сформулированные достаточные условия существова-
ния ДС. Так, для брюсселятора неоднородное решение можно найти
из следующего уравнения:
(х-x)2-(B/AK2-2A)(x-x) + qo(2)/(K2dyy) = O. (7.8)
Диаграмма состояний имеет такой же вид, как на рис. 7.2в.
Причем докритические ДС отсутствуют только при В = 2А2к2.
Подчеркнем, что при<?0(2) < О ДС всегда существуют.
Докритическая ДС не является обязательным атрибутом первой
краевой задачи. Чтобы убедиться в этом, достаточно рассмотреть
модель четырех ’’ящиков” (*xz = 4xz = х,). В этом случае диаграм-
ма состояний, симметричных относительно х,-моды, может не обла-
дать докритическими ветвями. Несимметричная мода имеет свойст-
ва, аналогичные (7.8). Уравнения состояний довольно сложны, но
удается показать, что всегда существует решение при qo(3) < О
в виде симметричной и при#0(2) < 0 — в виде асимметричной мод.
Отметим также, что, рассматривая изображающие точки на фазовой
плоскости дискретной модели, можно убедиться в соответствии ее
симметричной моды четной моде распределенной системы, а несим-
метричной — нечетной.
Завершая краткое обсуждение свойств простейших дискретных
моделей, выделим некоторые обстоятельства. При изучении систем
из ТУ диффузионно связанных элементов можно так же, как и при
N- 2, ввести нормальные координаты. Все пункты доказательства
существования нетривиального решения, если хотя бы один из
<7о (к) меньше нуля (к = 2,3,...), останутся в силе. Это позволяет
сделать строгое обобщение сформулированных достаточных усло-
154
вий для дискретной системы, состоящей из любого конечного числа
элементов. Конечно, это еще не дает возможности строгим образом
перенести утверждение на распределенные системы, т.е. системы с
бесконечным числом элементов, но, как представляется, имеет
эвристическую ценность.
7.2. Ветвление решений и квазигармонические распределения
Задача построения стационарных периодических по простран-
ственной координате решений базовой модели (1.1) - (1.3),
удовлетворяющих заданным граничным условиям, близка к тради-
ционным задачам теории колебаний нелинейных систем. В самом
деле, период колебаний нелинейной системы зависит от их амплиту-
ды. В обсуждаемых краевых задачах на отрезке [0,Z] период
должен быть строго равен 2L/k (к — целое). Поэтому требуется
найти такую амплитуду и форму периодического решения, при
которых это условие выполняется. Отсюда вытекает следующая
схема построения искомых решений: 1) выделяем из стационарной
части модели порождающую систему, решения которой (моды)
имеют порядок 2Z/fc; 2) подставляем полученные моды в полную
систему, варьируем период и получаем зависимость амплитуды
моды от ее периода; 3) определяем амплитуду моды, при которой
период равен 2L/k. Такая схема предполагает использование после-
довательных приближений и может быть реализована при наличии
малых параметров в модели.
Здесь рассматривается случай слабой нелинейности: системы с
малым параметром при диффузионном члене уравнения обладают
определенной спецификой и рассматриваются самостоятельно
в § 7.4. Самым простым способом получения периодических реше-
ний является построение уравнений гармонического баланса [154].
Хотя этот метод не отличается математической строгостью, его
результаты дают качественно правильное представление о поведе-
нии решений вблизи точек бифуркации. Наиболее строгим являет-
ся подход, основанный на теории ветвления решений нелинейных
уравнений [44], Этот подход для построения и анализа решений
модели’’брюсселятор” с периодическими граничными условиями
развит в цикле работ [18, 71]. Такие граничные условия определя-
ют некоторые особенности поведения характерных структур и
далее нами не рассматриваются. Подробное изложение применения
теории ветвления к краевым задачам первого и второго родов рдя
модели ’’брюсселятор” дается в [145]. Ниже рассматривается
упрощенный вариант схемы построения периодических решений,
основанный на идеях метода Боголюбова — Митропольского [45].
По строгости и, с другой стороны, наглядности такой подход зани-
155
мает промежуточное положение между гармоническим балансом
и схемами теории ветвления.
Представим базовую модель (1.3) в виде (Э/Эт 0)
£к(Вкр)*=
/А Э2 А \ А
+М'(Вкр)\х=М"(Вкр-B)x + F(x), (7.9)
где х ={xi...хп} — вектор приведенных переменных, М' - М" =
-М;М — матрица приведенной точечной системы (1.5), зависящая
от некоторого параметра В. Предполагается, что при В = Вкр линей-
ный оператор Lk(Bk) имеет для собственного значения нуль собст-
венную функцию хк с периодом 2L/k. Например, для граничных
условий второго рода (1.4) хк = сксоз(тгкг/Ь), а для первого рода
хк = ск sin(irkr/L), где ск — вектор постоянных, определенный с
точностью до произвольного множителя, а именно до амплитуды
структуры Ак. Для определенности будем считать, что ск =Акск,
где первый элемент с£ равен единице (с\к = 1).
Вблизи точки бифуркации (| Вкр — В | <Вкр) амплитуда струк-
туры относительно мала. Представляется естественным искать
решение в виде следующего ряда:
х=Акхк+А1х1+А%хп + ... (7.10)
Следуя теории ветвления решений, для определения меры
удаленности системы от точки бифуркации используют разложение
В — Вкр = АкУ\ + Ак7л + Ак 7jjj + . .. (7.11)
Использование в качестве малого параметра непосредственно
| В - Вкр | не позволяет достаточно полно представить разнообра-
зие форм: возможны только степенные функции, но дробно-степен-
ные не представлены вовсе. Тем не менее можно с учетом специфи-
ки задачи упростить (7.11).
Подставим (7.10) в (7.9) и, собрав члены при одинаковых
степенях Ак, получим систему дифференциальных уравнений для
определения xj, Хц и т.д. Эти уравнения имеют следующую струк-
туру:
Lkxi = F\\(Akxk, Акух + ...),
Lk*u = Fiu(Akxk+ A$xi, Afc7j+ ...),... (7.12)
В решениях системы (7.12) Xj,Xn, . . . будут существовать секу-
лярные члены. Они являются периодическими функциями IL/k,
удовлетворяющими граничным условиям только тогда, когда
156
правые части ортогональны собственным функциям х£ оператора
Lk, сопряженного оператору Lk:
L
SFMkXk, Акъ + .. ,)Xfcdr=0. (7.13)
о
В результате интегрирования получим алгебраические уравнения
для определения yj, 7jj, . . . Подстановка решений в (7.11) позво-
лит найти амплитуды Ак как функции I ВКр - В | и далее опреде-
лить их из (7.12). Хотя описанная процедура и решает поставлен-
ную задачу, но строгое формальное ее применение может приводить
к громоздким выкладкам (например суммированию бесконечных
рядов с постоянными членами). Использование простых физиче-
ских соображений о характере решений может упростить анализ
без внесения принципиальных ошибок в результаты. Рассмотрим
этот вопрос на примере квазигармонических ДС в модели ’’брюс-
селятор”. Уравнения модели в приведенных координатах (х=х —А,
у = у -В/A) имеют вид
d2 ~ ,
Dx х + (Вк - l)x+A2y = (B-Bk)x-F(x,y),
dr2 (7.14)
d ~ ~ ~
Оу —гу - Вкх + А2у= -(В - Вк)х + F(x,y),
dr
где F(x,y.) = (В/А)х2 + 2 Ах у + х2у, Вк = 1 + KkA2+K2Dx,
кк = (1 + K2Dx)l(K2Dy), к2 = Tt2k2IL. Для кинетики =
= (Вк — В) к2Dy и при В = Вк левая часть (7.14) обращается
в нуль подстановкой функции периода 2 L /к, например
Хк ~ -Ук/к-к ~Ак cos (irкг/L), (7-15)
На рис. 7.3 показан типичный характер зависимости Вк от
к (минимум достигается при к).
Рис. 7.3. Зависимость критических значе-
ний параметра В к от номера моды для
модели "брюсселятор”
= [1 + A(Dx/Dy)112]2, то условия ДС-неустойчивости выполняются
хотя бы для одной моды.
Остановимся на задаче с граничными условиями второго рода
(М) • Любое ее решение представляется в виде рядов
х = S a, cos (bir/L ),
'' (7.16)
у = S b, cos (itirlL).
i ~ 0
Аналогичные разложения справедливы для функций ХрХц, ...,
входящих в (7.10).
Подстановкой (7.16) в (7.14) устанавливается связь между в/
и bt: а,- = к-ibj, где к,- = (1 + i2K2Dx)l(i2K2Dy). Затем, исполь-
зуя (7.12), найдем явный вид хр хп и т.д. В уравнения для хг
войдут квадратичные члены нелинейности F(x, у ) (7.14), пропор-
циональные Ак cos (кг) = 'A А2к [1 — cos [2кг)], т.е. включают
нулевую и вторую гармонические составляющие структуры перио-
да TtLIk. Кубические члены(7.14) (XjA^ cos (кг)) дают вкладе пер-
вую и третью гармоники структуры, и хп ~ Ак cos (3 кг). Таким
образом, разложение искомого решения (7.10) представляется
в следующем виде:
х (г) = Ак со$(кг)+Ака2 со$(2кг)+Ака3 cos(3 кг) + ...,
У (г) = ~Аккк cos (кг) + (7.17)
+ А£(а0 - а3 k2~cos(2кг)) - Акк3а3 cos(3 кг) + ...,
где коэффициенты пропорциональности амплитуд гармоник нахо-
дятся из решения линейных уравнений (7.12) методом гармони-
ческого баланса:
а0=(2кМ2 ~В)/(2А3),
а2=(2ккА2 -В)1[2А(Вк-Вгк)], (7.18)
«з ={а1[В/А+А(кк + к2к)]-Кк1^'И(Вк-В3к),...
Условие ортогональности (см. (7.13)) правой части (7.14),в кото-
рой х и у определены выражениями (7.17), к вектору х+ дает
158
уравнение для определения амплитуд Рк:
Ak[q0(Jc)l(2k?Dy) +aiA2k +а32А* + ...] = О, (7.19)
где
q0(k) = (Bk-В), ai = Зкк/8-а0А + [А(кк + к2к) -
-Я/Л]а2, а2=Аа2а3(к2к+к3к)/2 + а1(кк+к2к)/4 + (7.20)
+ “з(«к +Лз*)/8 - а0а2 /8.
Коэффициент а2 всегда положителен, a at при В = Вк может
принимать как положительное, так и отрицательное значения.
В соответствии с этим возможны два типа ветвления в точке
В к {Чо^Вк- В) (рис. 7.4).
Уравнение (7.19) представляет собой разложение (7.11) для
брюсселятора: q0 ** Вк - В, = Д1, уП1 = 0, yIV = а2,
у v = 0, ... Такие уравнения типичны для задач с условием отсут-
ствия потоков на границах и физически реализуемой кинетикой.
Действительно, в силу симметрии задачи относительно замены
Ак -+ —Ак все коэффициенты при нечетных степенях Ак равны
нулю. Коэффициент а2 = ут1 ¥= 0 только при наличии квадратич-
ных членов в Ft, и, следовательно, возможность докритических
структур при В < Вк обусловлена именно этими членами. При
этом верхняя ветвь зависимости Ак(В) (рис. 7.46), иными слова-
ми, решение конечной амплитуды при В = Вк, обусловлена куби-
ческими членами в Е,. Напомним, что кубические члены обеспечи-
вают физическую реализуемость модели, а квадратичные — ее ”хи-
мичность”, т.е. неотрицательность переменных ( § 7.1).
Рис. 7.4. Два типа зависимостей амплитуд гармонических компонентов ДС
(Ак) от значений В модели ’’брюсселятор” вблизи точки бифуркации.
Штриховая линия указывает нестабильные состояния; А =2, Dx=0,08,
Dy = 0,4, L = 1 (а); А = 10, Dx = 0.75, Dy = 1, L = 1 (б)
159
Уравнение (7.11) при \Вк — В | -» 0 имеет одним из решений
А к q0/a 1 -+0, и, следовательно, точка q0 = О (В = Вк) действи-
тельно является точкой ответвления решения с периодом 2L/k.
Тип ветвления полностью определяется знаком a i = 7j, т.е. уста-
навливается по первому приближению, если a i ¥= 0. При a i < 0
(В > Вк, q0 < 0) существование надкритических структур
(рис. 7.46) гарантируется только в физически реализуемых моде-
лях. Разложение (7.11) для решений с относительно большой
амплитудой Ак неправомерно. Тем не менее укажем, что можно
доказать неотрицательность всех коэффициентов при ’’старших”
степенях Ак, т.е. что при В > Вк (q0 < 0) существуют решения
(7.11) с большими Ак.
Изложенный подход позволяет последовательно определить
коэффициенты гармонических рядов (7.16). Можно решать задачу
непосредственной подстановкой этих рядов в (7.14). Собрав члены
при одинаковых гармониках, мы получим бесконечную систему
уравнений гармонического баланса для определения а, и Ь,.
Разложения (7.10), (7.11) дают регулярный метод ее размыкания
или укорочения, если следовать терминологии метода Боголюбо-
ва — Митропольского. Однако для качественных оценок решений
модели можно использовать наиболее короткие ряды. Таковыми
являются ряды с двумя членами — основной и нулевой гармоника-
ми. Для брюсселятора получаем следующее уравнение:
Ак [(3/4 А2 )А* -(3/кк + k2D0/(2А2))A2 +^/(2 KkK2Dy)] = 0.
(7.21)
Это уравнение позволяет увидеть основные особенности ’’фазовых”
диаграмм ДС в рассматриваемой модели. Заметим, что при заме-
не к2 на 2 уравнение (7.21) не отличается от уравнения для Д2
в простейшей дискретной модели (7.5). Использование таких
’’минимальных” подходов в исследованиях потенциальных возмож-
ностей систем в отношении ДС представляется достаточно обосно-
ванным.
Коротко остановимся на первой краевой задаче для (7.14).
В этом случае в гармонических рядах (7.16) cos заменяется на sin.
Поскольку отсутствует нулевая гармоника, то в разложении
sin2 (itkr IL) содержится бесконечно много членов, причем случай
четного и нечетного к приводит к разным уравнениям для Ак.
Действительно, при четном к решение симметрично относительно
замены Ак -+ — Ак, так как одинаковое количество полуволн рас-
положено в областях х < х = А и х >х = А. Поэтому в (7.11)
160
71, 7 in, 7v и т д- равны нулю. При нечетном к в системах с юад-
ратичными членами в нелинейностях такая симметрия не может
быть наблюдена. Для определения Ак в первом приближеши
(7.10) — (7.13) получаем квадратное уравнение (аналогичное (7.8)
для дискретнрй модели *), к2 -> 2), которое показывает, что три
всех В > Вк (и некоторых В, меньших Вк) существуют две стуук-
туры с различными амплитудами. Подробные расчеты по сх<ме,
близкой к изложенной, приведены в работе [145]. Подчеркам
одно обстоятельство. Если при анализе линеаризованных моделей
(гл. 3) граничные условия не играли роли, то свойства доке
’’слабонелинейных” моделей существенно связаны с ними. Именно
они ответственны за появление нового типа (при нечетном к)
диаграмм состояний.
7.3. Множественность структур и их устойчивость
Исследование устойчивости структур к малым возмущениямсво-
дится к нахождению спектра нарастающих во времени возмущений
тривиального решения линейной неоднородной системы уравнений
dxjdt = Lx + Ф(г)дг, где L - линейный дифференциальный оператор
(7.9), Ф(г) = ЭФ/Эх | х _ xs(r) (§ 3.2). Возмущения должны удов-
летворять граничным условиям задачи, но на отрезке могут иметь
произвольную форму. Любое такое возмущение можно разложить
в бесконечный ряд по гармоническим модам, например, для вто-
рой краевой задачи (1.4) ими будут функции (7.16) ez(r) cos (irii/L)
(см. также § 5.4). В отличие от анализа устойчивости однородного
состояния, здесь уравнения для а, (д) сцеплены между собой. Уни-
версальная процедура, которая позволила бы выяснить вопрос о
наличии положительных собственных значений системы уравнений
для а, (д), не разработана. Существуют лишь приемы для спешил ь-
ных видов структур, но они довольно-таки сложны.
Исследование устойчивости к возмущениям определенных, фик-
сированных классов проводится довольно просто и вместе с гем
позволяет выявить область параметров, при которых исследуемые
структуры неустойчивы. Подчеркнем, что ситуация здесь такая ке,
как в теории нелинейных колебаний при анализе устойчивости пре-
дельных циклов на основе укороченных уравнений: эта устойчи-
*) Конечно, значения коэффициентов уравнений для амплитуд несколько
различаются. Однако качественные выводы о влиянии параметров модел« на
Характер решений сохраняют силу. В то же время метод гармонического
баланса для Этих решений не применим.
161
вость необходима, но недостаточна для устойчивости решения
в полной системе. Тем не менее рациональный выбор форм описан-
ных возмущений позволяет получить достаточно полное представ-
ление о характере неустойчивости структуры и ответвляемых реше-
ний. В этом параграфе мы остановимся на задачах ’’взаимодейст-
вий” пар решений, а также на примере систем, допускающих стро-
гий анализ устойчивости структуры.
Обыкновенные дифференциальные уравнения для амплитуды
мод можно получить по схеме методов, упоминавшихся
в § 7.2, например методом гармонического баланса. При этом опе-
ратор Э/Эг включается в F(x). Для любой моды (включая нуле-
вую) получаемые уравнения, как уже неоднократно отмечалось,
качественно совпадают с уравнениями простейшей дискретной
модели (два ’’ящика”), записанной в Д-, S-координатах (§ 3.4,
5.4 и 7.1). Для наглядности будем ссылаться в основном на
дискретную задачу.
Так же, как и в случае однородных состояний, целесообразно
выделить две основные группы точек бифуркации (ср. с § 3.2).
Во-первых, зто точки, в которых появляется нечетное число корней
характеристического уравнения с положительными действитель-
ными частями. Такие неустойчивости будем называть экспонен-
циальными (или триггерными). Во-вторых, это случаи появления
четного числа таких корней. Эти неустойчивости будем называть
колебательными, причем возможно возникновение как однород-
ных, так и неоднородных синхронных автоколебаний.
Экспоненциальная неустойчивость характерна для конкуренции
различных стационарных состояний. Простейший случай такой
неустойчивости легко понять, если рассмотреть график зависимо-
сти ДХ(ДХ) (см. рис. 7.2а). Для решения с меньшей амплитудой
Д* имеет место неравенство ЭД^/ЭДГ > 0, а уравнения для Д, S
(ср. с § 5.4) допускают малые независимые движения. В ре-
зультате при ответвлении докритических (В < Вкр) решений
(см. рис. 7.2а, 7.46) решение с меньшей амплитудой неустойчиво.
Структура в докритической области может возникать ’’жестким”
образом, т.е. такие системы являются триггерными.
Поучительно рассмотреть также системы с физически нереали-
зуемой кинетикой (§ 7.1, пример 3). В них существование ста-
ционарных структур гарантируется только при докритических
значениях параметров (когда q0 > 0). Ответвляющиеся в критиче-
ских точках решения экспоненциально неустойчивы, в чем легко
убедиться, анализируя зависимость Д/(Д/) (см. рис. 7.1а, штрих-
пунктирная линия). Отметим также, что, как правило, в таких мо-
делях все неоднородные стационарные решения неустойчивы.
162
Для колебательных неустойчивостей стационарных ДС имеет
место следующее утверждение: они имеют место только при таких
значениях параметров, когда точечная кинетика является авто-
колебательной. Мы опустим доказательство, поскольку оно гро-
моздко, хотя и^це сложно, и сразу же перейдем к обсуждению кон-
кретных моделей.
Пример 1. Рассмотрим систему с кубической нелинейностью,
состоящую из генераторов Ван-дер-Поля:
d с г з d
— х = -у + 8lX-83x3, —у = х. (7.22)
dt dt
Предельный цикл в (7.22) существует для любых положительных
значений и 83. Для такой точечной кинетики возможен только
тип зависимости ДХ(ДХ), показанный на рис. 7.1а (сплошная ли-
ния) : Дх* = \/~ «/о (2)/ (663dj,), Д^, = Д^/ (2dy), Sx = Sy = 0, где
q0 (2) = -2dy(6j - 2 dx). Матрица системы, линеаризованной от-
носительно решения Д* ¥= 0, клеточно-диагональна, и характеристи-
ческое уравнение распадается на два:
X2 — (St - 3 63 Д»2)Х +<?о(0) = О,
2 (7.23)
Х2-(5!- 3 53д; -2dx-2 470+^0(2) = о.
2
Уравнения (7.23) показывают, что если Дх < 6 j/ (3 63), то стацио-
нарное решение Дх неустойчиво. Этому соотношению можно при-
дать общую формулировку, если принять во внимание, что
хн = ±\/б1/(363) являются границами инкрементной области
генератора, т.е. области фазового пространства, в которой
(9Fx/9x + dFy /ду) > 0, а генератор, когда его изображающая
точка проходит через эту область, получает энергию, что и обеспе-
чивает существование автоколебаний. Следующее утверждение
имеет силу для любой системы с диффузионными связями: если
все изображающие точки стационарного решения заключены
внутри инкрементной области фазового пространства системы,
то такое решение неустойчиво. Не останавливаясь на доказатель-
стве, отметим лишь, что речь идет только о достаточном условии
неустойчивости ДС.
Модель с кубической нелинейностью позволяет увидеть сущест-
венное различие между потерями устойчивостей однородных и
неоднородных состояний. Оказывается, что при любом сочетании
корней с положительными действительными частями уравнений
163
(7.23) единственным притягивающим решением является однород-
ный предельный цикл (Д (г) = 0). От типа неустойчивости реше-
ния Д* зависит только режим установления таких автоколебаний.
Вообще говоря, это имеет место и для других систем. Однако мо-
дели, имеющие и квадратичные (четные) нелинейности, допускают
также другой тип автоколебаний, а именно: квазисинхронныр авто-
колебания относительно неоднородного состояния. При этом ана-
лиз устойчивости в малом не позволяет установить, какой именно
режим будет существовать в нелинейной системе.
Пример 2. Рассмотрим автоколебания в модели ’’брюсселя-
тор” (2.54). В этой модели при В > Вкоп = 1 + А2 точечная кине-
тика является автоколебательной. При этом пространственно одно-
родные синфазные автоколебания всегда имеют устойчивый режим.
Более того, при достаточно больших значениях В (см. рис. 7.2
и 7.4) он остается единственным устойчивым режимом.
В случае Вкр < Вкоп и А2 < 4dy (т.е. в отсутствие докритиче-
ских структур; см. рис. 7,26 и ср. с рис. 7.2а) при потере устойчи-
вости стационарного неоднородного состояния имеет место бифур-
кация, при которой рождаются два новых предельных цикла: устой-
чивый и неустойчивый. При dy>dx оценкой бифуркационных пара-
метров может служить 2?бифя>(^х+ Л2) + Vi^x+A2)2 + (1 +2с?у)>
> Вкол > Якр. Пример устойчивых неоднородных автоколебаний
при В >,Вбиф, рассчитанный численным интегрированием полной
системы, показан на рис. 7.5. Видно, что переменные х, и х2, y-i
и у2 меняются практически синфазно относительно состояний
х* 2 = х ± А*х. Для аналитического построения такого предельного
цикла можно воспользоваться методом усреднения Боголюбова -
Митропольского. При этом малым параметром будет е =
Рис. 7.5. Квазнсннхронные автоколебания около неоднородного состояния
модели "брюсселятор”: А = 1, В = 2,5. dx = 0,1. dy = 1 (см. также рис. 7.2)
164
- (В - Вбиф)12, кроме того, необходимо учесть не менее двух
членов разложения решения по степеням е. Не останавливаясь
на деталях, приведем вид решения: Дг(г) = А* + 0(е3),
Sx(t) =SX + eacos cor + e2(a0 + a 2 cos 2 cor) + ..., где a a' ±
± x/(a'2 + Z>)sign(5 - Дбиф) и b > 0 при e2 = В - Вбиф 1-
Однако при увеличении (В — 5биф) величина b становится отрица-
тельной и в конце концов предельные циклы исчезают, т.е. имеет
место бифуркация типа ’’слияние циклов”.
Как показывает такое рассмотрение, а также численные экспери-
менты, при В > Вкоп единственным устойчивым режимом в систе-
ме остаются гомогенные автоколебания. Вообще говоря, такие пре-
дельные циклы, возникнув при В = Вкоп , как правило, не теряют
устойчивости ни при каких значениях параметров системы. Они
обычно имеют наибольшую область притяжения в фазовом прост-
ранстве системы.
В докритической области параметров (В < Вкр) устойчивые
неоднородные колебания невозможны. Здесь могут быть либо ста-
ционарные состояния (см. рис. 7.2а) .либо гомогенный предельный
цикл. В случае этого типа ветвления решений неоднородное стацио-
нарное состояние обычно имеет значительно большие области
устойчивости при малых возмущениях по сравнению с ситуациями
типа рис. 7.26. Но здесь также при увеличении В относительно
Вкол область притяжения резко сжимается. Так, для значе-
ний параметров системы, указанных на рис. 7.2а, уже при В =
= 25КОЛ * 5тах/2 (если В > Втлх, то ДС абсолютно неустой-
чивы) отклонения значений динамических переменных от стацио-
нарных не превышают 0,5%, а при В 0,9 Втах не превышают
10’2 %.
Как видно, модель ’’брюсселятор” обладает существенно боль-
шим разнообразием бифуркаций, нежели модель с чисто кубиче-
ской нелинейностью (пример 1). Ее свойства, по-видимому,типич-
ны для таких ’’химических” систем. Ранее проведенный строгий и
детальный анализ бифуркаций в одной экологической модели
с dy -+ 00 [19] подтверждает это положение. Полученные результа-
ты без труда переносятся на случай распределенных систем с квази-
гармоническими ДС, а для других классов систем они могут быть
получены самостоятельно. Например, пульсации контрастных
(Ру -> 00; см. § 7.4) ДС в брюсселяторе обсуждались Кернером и
Осиповым [107.108].
В распределенных системах условия ДС-неустойчивости, как
правило, выполняются одновременно для нескольких длин волн
165
(см. рис. 7.3), что соответствует ответвлению стационарных реше-
ний с различными формами. Но все ли они могут быть реализова-
ны? Ответ на этот вопрос можно получить, только исследовав их
устойчивость, в частности, по отношению к возмущениям с форма-
ми альтернативных решений. Ограничиваясь рамками такой поста-
новки вопроса, рассмотрим зависимости амплитуд решений от
длины L системы.
Пример 3. Исследуем гистерезисные переходы между ДС
при изменении длины системы. В системах с кубической не-
линейностью наиболее эффективными являются взаимодействия
между волнами с соотношением периодов */з- Поэтому для
модели Ван-дер-Поля (7.22) в первую очередь следует строить
динамическую систему уравнений для амплитуд первой (41)
и третьей (А3) мод. Подставив решение в форме x(t, г) =
= Aicos (тгг/£) + A3cos(3irrlL) в (5.16) и усреднив по перио-
дам YiL и затем по 3!гЬ, получим
d Аг
(ttl — ЗА2—ЗА1А3—6А2),
dt 4
d A. C7’24)
— A3= — (tt3— 3A2 — 3A3At-6A2),
dt 4
где a, = -4<?0(К1)Л2/(я2Ду), a3 = -4q0 (k3)L2/(9n2Dy), a q0 -
свободный член характеристического уравнения (3.5). Для просто-
ты предполагаем 61 = 6 3 = 1.
Качественное исследование решений системы уравнений (7.24)
удобно выполнить графически. Их нуль-изоклины представлены на
рис.7.6 для следующих случаев: ф>(л2) ~ оц >0 и q0(ir29) ~a3 < 0
(рис. 7.6а); cq >0 и a3 >0 (рис.7.66); cq < 0 и а3 >0(рис.7.6в).
Семейство вложенных эллипсов (рис. 7.66) соответствует умень-
шающимся значениям . Особые точки <91 и Os являются устой-
чивыми узлами, О0, 0.2 и О4 - седлами, О3 — седлом, если она
находится внутри соответствующего эллипса, и устойчивым
узлом — в противном случае. Пользуясь графиками зависимостей
«1 и а3 от L (рис. 7.7а) и учитывая изменения положения, числа и
характера особых точек при различных cq и а3 (рис. 7.6), нетруд-
но построить искомый график зависимости At и А3 от L (рис.7.7 б).
Переход 1 -> 3 происходит при таком значении L, когда эллипс
(рис. 7.66, штриховая линия) касается А3-нуль-изоклины во II и
IV квадрантах; обратный переход 3 -> 1 происходит при таком
касании в 1 и III квадрантах.
166
Рис. 7.6. Фазовая плоскость двухмодового варианта распределенной модели
Ван-дер-Поля (7.24): гистерезисный переход между первой и третьей модами
Рис. 7.7. Зависимости линейных инкрементов мод (fl) и амплитуд гармо-
нических составляющих ДС (6) от длины L распределенной системы
Ван-дер-Поля
167
Рис. 7.8. Гистерезисный переход между ДС с разными формами при измене-
нии длины системы ’’брюсселятор"; - амплитуды гармонических состав-
ляющих стационарных решений, А = 10, В = 99, Dx - 0,75, Dy = 1 (а); началь-
ное н конечное состояния при переходе от ДС с к - 1 к ДС с к = 2 (&); воз-
можность мягкого перехода между ДС с различными формами: А = 5, В =18,
Dx = 0,04, Dy = 1 (в)
Таким образом, при изменении L образуется петля гистерези-
са *). Отметим, что при полном обходе петли (1 -> 3 -+ 1) ’’поляр-
ность” ДС меняется, т.е. А, -> —А,. Множественность ДС является
общим свойством кинетических систем. Действительно, наличие
*) Следует заметить, что рассмотренный подход является чисто модель-
ным. Дело в том. что не учитывалось существование мощного притягиваю-
щего объекта - однородного предельного цикла. В процессе переходов
конечным состоянием системы может оказаться не стационарная ДС. а гомо-
генный предельный цикл.
168
гистерезиса обусловлено неэквивалентностью преобразований на
нелинейности первой гармоники в третью и обратно. Естественно,
номера мод, между которыми возможны переходы, всецело опре-
деляются типом нелинейности.
В модели ’’брюсселятор” рассматриваемые переходы уже идут
по иной схеме: 1 -> 2 -* 4 -* 8 -* ... или 3 -* 6 -> 12 ->... и т.п. Безгис-
терезисный переход и здесь возможен только, если области само-
возбуждения мод не перекрываются вовсе (рис. 7.8в). Для этой
модели была выполнена серия численных экспериментов [49],
результаты которой показаны на рис. 7.8. Эти результаты полно-
стью совпадают с данными проведенного качественного анализа.
Причем они остаются справедливыми не только для квазигармони-
ческих ДС, но также и в общем случае.
Пример 4. Исследуем роль граничных условий. В простран-
ственно однородных системах с одной переменной также возмож-
ны решения типа ДС, но все они являются неустойчивыми [209].
Подчеркнем, что понятие однородности системы должно включать
в себя и условия на границах. Для граничных условий третьего
(дх \
Dx— = — c(b — х) | решение типа ДС становится
Эг =0 /
г = L
устойчивым [244]. Теми же авторами проведен анализ бифурка-
ций при изменении длины: оказалось, что устойчивой является
только первая мода. Поэтому в отношении структурообразования
возможности таких систем относительно бедны. Плавное распреде-
ление переменной в докритической области параметров и образова-
ние одной ступеньки в закритической области: по мере углубления
в нее крутизна ступеньки увеличивается.
Последний пример простейшей модели наглядно показывает,
что граничные условия существенным образом влияют на решение
задачи об устойчивости ДС. Этот факт следует принимать во внима-
ние при обобщениях результатов качественного анализа моде-
лей ДС. В остальном выводы, полученные из рассмотрения приве-
денных примеров, остаются в силе для широкого класса систем
и типов ДС.
7.4. Контрастные диссипативные структуры
В теории ДС системы, в которых условия ДС-неустойчивости
выполнены для большого числа мод (fcmax/fcmjn > 1), требуют
особого рассмотрения, так как среди таких мод найдутся последо-
вательности кратных мод, которые эффективно взаимодейству-
ют между собой на нелинейностях системы. Процедура построения
169
решений, основанная на выделении линеаризованной порождающей
системы (ср. с §7.2), становится крайне неэффективной: она по-
зволяет лишь указать положение точек ветвления решений. В тео-
рии автоколебаний такая ситуация характерна для релаксационных
систем, по аналогии с которыми можно выделить системы с малыми
параметрами при пространственных производных, точнее, необходи-
мо, чтобы выполнялось неравенство Dy (dFx/dx) /Dx (dFv/dy) > 1,
что отвечает условию kmax/kmin > 1 (см. § 3.3). Для простоты бу-
дем полагать, что характерные временные масштабы переменных х
и у совпадают по порядку величин и, следовательно, для рассмат-
риваемых систем DxIDy < 1.
ДС в таких системах получила название ’’контрастной”, так как
пространство, занятое подобной ДС, оказывается разделенным на
области с четкими границами. По характеру распределения пере-
менных известны Два типа контрастных ДС. Схемы построения
решений соответствующих моделей, имея много общего, все же
различаются.
Сначала остановимся на общих моментах построения решения
систем стационарных уравнений
d2 d2
Dx-—хл-Fx(x,y) = 0, Dy — у+Fy(x,y) = 0, (7.25)
dr2 dr2
дополненных условиями на границах отрезка [О, L], Будем рас-
сматривать граничные условия второго рода (1.4), тогда (см. так-
же (1.1)) равенства
L
f Fx (х, y)dr = f Fx (x, у (x)) dx =
о Я
£
= f Fy(x (y),y) dy=0 (7.26)
о
выполняются для любого решения (7.25) (здесь - проекция
решения на фазовую плоскость х, у).
Построение удобно начинать с элементарной ячейки ДС. Ее раз-
мер должен быть порядка диффузионной длины для ’’пассивной”
переменной у, а на границах должны выполняться условия второ-
го рода (1.4). Эта ячейка, являясь ’’полуволновой”, аналогична
моде с к = 1 для случая квазигармонических ДС. Очевидно, что из
таких ячеек с длинами Lp можно построить ДС на всем отрезке L,
и для них уже можно ставить вопрос о зависимости числа устой-
чивых решений от вида Fx и Fy, а также о минимальном и макси-
мальном значениях Lp, при которых ДС существует.
Случай 1. Прямоугольные ДС. Такие ДС типичны для систем
с N-образной нуль-изоклиной автокаталитической переменной х
170
Рис. 7.9. Контрастные ДС в модели ’’орегонатор” (5.4). Схема построения
стационарных решений для случая Dx = О
(Dx< Dy) (рис. 7.9). Примером такой системы будет служить
модифицированный орегонатор (5.4), полученный из (2.57). При-
чем для удобства сравнения с другими системами этой главы мы
переобозначили х и у в (5.4), так что х является автокаталитичес-
кой переменной.
В нулевом приближении по Dx/Dy принимается, что Dx = 0.
Очевидно, что проекция любого стационарного решения (5.4)
должна находиться на х-нуль-изоклине; она показана толстыми
линиями на рис. 7.9. Необходимость разрыва (штриховая ли-
ния) , иначе говоря, наличие двух участков, лежащих ниже и вы-
ше ^-нуль-изоклины, вытекает из условия (7.26): fF(x(y),y) dy = 0,
а непрерывные решения, соответствующие участку АВ у-нуль-изок-
лины, неустойчивы. В областях непрерывности решений измене-
ния х и у связаны зависимостью х(у), определяемой из алгебраи-
ческого уравнения Fx(x, у) = 0. Функция х(у) имеет три ветви
(ха (у) > хв (у) и хав (у)) > соответствующие участкам А, В и АВ
^-нуль-изоклины.
Зависимость у (г) должна быть непрерывной и на концах отрез-
ка L р удовлетворять уравнениям (7.25) (d 2 у /dr 2 + Fy(x(y),y) = 0)
и граничным условиям второго рода (1.4). При этом граничные ус-
171
ловия для х будут также выполнены, так как
dx dyA в (х) / dy\
— = I _Z_ ) = 0. (7.27)
dr r=o,tp dx \dr/r=0Lp
Условием непрерывности по у является равенство потоков между
ветвями Ул (г) иув(г):
dyA dyB
dr у dr
= 0.
(7.28)
Место разрыва ур на фазовой плоскости при Dx = 0 может быть
выбрано произвольно в пределах участков А к В. Поэтому на от-
резке Lp может быть построено континуальное множество реше-
ний. Для этого, например, можно воспользоваться следующей
процедурой:
а) Для начальных условий dyldr\r = 0 = 0 иу(0) = ymex ре-
шим задачу Коши на участке А для отрезка длиной ЬА (утлх и
ЬА далее будем рассматривать как параметры семейства решений).
б) Для участка В также решаем задачу Коши с начальными ус-
ловиями ув (0) =Ул(^л) и dyBjdr |г = о = dyjjdr |r = Ь>А. При этом
отбросим единственное решение, имеющее ненулевую производ-
ную (допустим, в точке г = LB). Такая точка для решений уравне-
ний второго порядка обязательно существует.
Замечание. Решения уА(г) и ув (г) могут иметь оспилля-
ции. Следует оставить только монотонные участки, так как ко-
лебательные решения абсолютно неустойчивы (с. пример 4 § 7.3).
Очевидно, что следует отбросить решения, проекции которых выхо-
дят за пределы участков А или В. Тем не менее в нашем распоря-
жении останется достаточный запас решений.
в) В результате шагов а) и б) мы получили семейство решений,
из которого теперь можно выделить решения с LA + LB = £р, что
и решает поставленную задачу для отрезка длиной Lp и Dx = 0,
Dy ¥=0.
Сама процедура получения решений показывает, что на отрез-
ке Lp существует континуум решений. Очевидным следствием
этого является существование множества форм контрастных ДС
для отрезка L > Lp. Ограничения на отбор решений, указанные
в замечании к а) и б), показывают, что существует максимальная
длина элементарной ячейки (периода ДС), которая определяется,
во-первых, из требования отсутствия осцилляции у на плавных
участках Ак В (отсюда Lp ~ y/Dy) и, во-вторых, из величины
максимально допустимой амплитуды у (г) (УпНп < У (г) < утах),
что определяется точечной кинетикой системы. Поэтому давать
оценки Lp без анализа полной нелинейной модели, как это было
в случае квазигармонических ДС, не представляется возможным.
172
В качестве одного параметра семейства решений для Dx = О
может быть выбрана координата линии разрыва. Очевидно, реше-
ния из семейств различных L р могут быть сшиты по непрерывнос-
ти при значениях переменных, равных утах ихл(утах) (илиут}П
и хв (ymin)). Поэтому для системы с L > Lp можно построить
контрастные ДС со случайными распределенными расстояниями
между пиками: L = LPi + £Pj + LP}. Причем формы пиков так-
же различаются. Подчеркнем, что этот результат опирается на су-
ществование разрывов в распределении автокаталитической пере-
менной х при Dx = 0.
В следующем, первом по DxjDy приближении распределение
х(г) должно быть непрерывным, т.е. область скачка будет зани-
мать область с длиной порядка I Lp(DxIDy)xl2 < 1. В области
скачка с точностью до величин порядка е = (Dx/Dy) перемен-
ная у (г) имеет постоянное значение, равное ур, что можно пока-
зать, использовав технику теории возмущений (§3.4). В области
плавных распределений разложение решения по малому па-
раметру е имеет вид x(r) = xA(r) + exi + е2х2 + ..., где
Fx(x4,Z4) ~ 0. Подставив это разложение в (7.25), получим
*1 « [(d2xA/dr2)/ (dF/dx) ]*лХ4-Так какхл удовлетворяет урав-
нению второго порядка, то всюду на А имеет конечное значе-
ние (порядка амплитуды ее изменений на этом участке). Исполь-
зуя эти результаты, оценим интегралы при условии существова-
ния решений (7.26):
L la-i/2 lp
f Fx(x,y)dr = f Fxdr+ f Fxdr +
0 .0 lA - l/2
La + 1/2 ax
+ f Fx(x,y)dr^y/T f Fx(x,y)dx = 0.
~ Ч2 Amin
Таким образом, при e -> 0 условие (7.26) сводится к следующему
уравнений для ур:
хт ах
f Fx(x,y)dx = 0. (7.29)
xmin
Заметим, что решение уравнения (7.29) совпадает с нулевой
точкой У(ур) - зависимости скорости фронта БИ от медленной
переменной (см. табл. 3.1). Для систем с монотонной зависи-
мостью F(yp) существует единственное положение линии фронта
контрастных ДС, и поэтому на L можно сшивать только ячейки
с одинаковыми L р. В системах с немонотонной зависимостью F(yp)
(§4.7) имеются уже два таких устойчивых положения. И только
в дискретных моделях (§3.4 и 3.7) имеется континуум значе-
173
Рнс. 7.10. Контрастные ДС в модели ’’брюсселятор”. Фазовая плоскость и
изменения потенциалов <рх и
ний Ур, при которых V = 0 (см. рис. 3.15). Именно в сипу послед-
него обстоятельства в численных экспериментах, проводимых по
схеме конечных разностей, при небольшом числе элементов N для
базовой модели (1.3) могут устанавливаться решения, характер-
ные для случая Dx = 0. Истинно случайные распределения могут
иметь место в средах с немонотонной зависимостью У(ур); для мо-
дели с двумя значениями Кр возможно случайное чередование двух
элементов ДС, определяемое начальными условиями.
Чтобы завершить построение первого приближения, необходи-
мо уточнить условие сшивки по у в области скачка (7.28). Для
этого используем уравнение непрерывности (1.1), что дает
/ dyA dyB
lA-IB = Dy{~~
\ dr dr
Уа = ув =
xmax
= f Fy(x,yp)dx, (7.30)
*m in
где интеграл (источник в смысле (1.1)) дает вклад порядка х/Т.
Использование (7.30) вместо (7.28), а также рассмотрение следую-
щих приближений по е не вносят качественных изменений в харак-
тер решений — в основном уточняется пространственная форма
перехода между областями плавных и резких распределений.
Процедура построения контрастных ДС теперь выглядит следую-
щим образом. По схеме нулевого приближения строим семейство
решений для Lp, из которого, пользуясь (7.29), отбираем единст-
венное решение, форма которого уточняется по (7.30).
Случай 2. Дичковые контрастные ДС. В таких моделях, как
брюсселятор (2.54), х-нуль-изоклина имеет всего лишь один экст-
174
ремум (рис. 7.10) и, следовательно, контрастные ДС, обсуждав-
шиеся выше, не могут бьпь построены. Достаточные условия су-
ществования ДС выполняются в очень широкой области парамет-
ров модели В > ВКр = /+ n2k2DxIL2 (ср. с (7.14); см. рис. 7.3
для случаев Dx/Dy ~ 1). Возникает вопрос о форме ДС в таких
системах при е = (DxlDy) ->0.
Основные этапы рассуждений в случае 1 сохраняют силу и здесь.
Различия связаны с проведением решения на участке резких изме-
нений. Полагая у (г) =yt = const, получим уравнение
— х+А (В + l)x+x2yt = -— х + — <рх (х) = 0,
dr2 dr2 dx
(7.31)
где у>х = fFx(x, y)dx — потенциал; аналогично вводится потен-
циал ipy. Использование потенциалов >рх и >ру позволяет привлечь
механические аналогии и качественно представить решения на
главном и резком участках [107].
Функция |рх(х, yt) показывает существование потенциальной
ямы (см. рис. 7.10). Интересным представляется только движе-
ние из седловой точки >р(х, у). При этом в граничной точке хтах
должно выполняться условие (1.4): dxfdr = 0. Функция ч>у (у) име-
ет две ветви, соответствующие двум решениям у (х) квадратного
уравнения Fx(x, у) = 0. Легко видеть, что движение в потенциа-
ле >ру, соответствующем ветви И, неустойчиво, а поэтому далее не
обсуждается.
С помощью потенциалов >рх и >ру можно проинтегрировать урав-
нения движения на отдельных участках и построить семейства ре-
шений, удовлетворяющих граничным условиям второго рода на
Рис. 7.11. Форма контрастной ДС ^maJ
в модели ’’брюсселятор”
(L-l)L г
концах отрезка Lv. Параметрами семейств являются Утах иуг.
Чтобы завершить процедуру, решения следует сшить по непрерыв-
ности переменных и их производных.
С точностью до величин порядка е выполняется равенство
yf = у (Lp), где у (г) - решение на плавном участке, причем у (0) =
~ Утах, dyjdr |г = 0=0 (рис.7.11). Уравнение непрерывности среды
175
(1.1) (или (7.26)) приводит к следующему условию:
£р d
f Fy(x,yt)dr = Dy — y , (7.32)
Lp-l dr r=L
где I ~y/eLp; точная оценка длины l должна быть найдена из по-
лученного решения уравнения для резкого участка. Члены равенст-
ва (7.32) имеют порядок у/ё, и поэтому оно может быть исполь-
зовано лишь в первом и последующих приближениях. Условие
(7.26) для Fx(x, у) при подстановке нулевого приближения вы-
полняется с точностью до е, первого е2 и т.д. Таким образом, в
первом приближении удается построить решение на отрезке Lp,
для которого величины xmax, yt, утах однозначно определяются
его длиной.
Рассмотрим основные свойства контрастных ДС. Такие ДС воз-
никают при значительно ослабленных (по сравнению с квазигармо-
ническими) требованиях к точечной кинетике системы. Так, в
брюсселяторе они имеются уже при В ~ 1, когда в отношении ос-
тальных процессов активные свойства системы практически не
проявляются. Уже вблизи точки первого ветвления контрастные
ДС имеют большую амплитуду. Максимально возможный период
обусловлен шириной фронта (пичка) и может быть оценен по ве-
личине коэффициента диффузии автокаталитической переменной;
его точное значение зависит также от автокатализа в системе.
Максимальный период зависит как от Dy, так и от особенностей
точечной кинетики, например от положения экстремумов
нуль-изоклин на фазовой плоскости. Длинные системы (L >Zp)
допускают множество стационарных решений с периодом L
(к = ^min> ^min + 1,• • ); при L -> 00 число возможных решений
также бесконечно, но множество решений остается сепара-
бельным.
Устойчивость контрастных ДС к малым возмущениям основа-
тельно исследована в цикле работ Кернера и Осипова (см., напри-
мер, [107, 108]). Ими разработан метод получения оценок собст-
венных значений соответствующих неоднородных задач. При этом
оказалось плодотворным использование аналогий с известными
задачами квантовой механики [162]. Не имея возможности оста-
новиться подробнее на цитированных работах, укажем только
некоторые результаты. Среди однопичковых ДС устойчивыми
оказываются только те, у которых пик расположен на границе
системы. В коротких образцах (/< £< £р) однопичковые ДС мо-
гут иметь колебательную неустойчивость. Предполагается, что при
этом возникают квазиоднородные автоколебания ДС (ср. с рис. 7.5).
Для случаев и пичковых, и прямоугольных ДС показана устойчи-
176
вость структур с различными формами. Это означает, что в зави-
симости от начальных условий может быть сформирована любая
из множества контрастных ДС. Здесь представляется целесообраз-
ным привести некоторые соображения о поведении контрастных
ДС во флуктуационных полях.
Пусть вследствие ’’сложных” начальных условий устанавлива-
ется некоторая структура. Флуктуации инициируют переход к сле-
дующей ДС и так до тех пор, пока система не придет к ДС, имею-
щей наибольшую область притяжения. Действительно, в длинных
системах [L > Zp) пороги между близкими по форме ДС малы.
В условиях сшивания члены (7.30) или (7.32) имеют порядок
х/ё < 1. Это означает, что если эти условия не выполнены, то вре-
мена переходных процессов к ’’правильным” состояниям велики
(порядка 1/е), причем пички (или импульсы) формируются за
времена порядка 1. Можно полагать, что в системах имеется более
плотное множество квазистабильных ДС. Через такие состояния
эволюция системы от ’’случайного” начального* распределения к
конечной ДС может быть почти непрерывной и завершаться в от-
носительно короткие времена.
Картина становления ДС во флуктуационных полях нуждается
в строгих теоретических исследованиях, что является задачей
дальнейших работ. С другой стороны, детерминированные модели
описывают базисный процесс формирования ДС, также приводя-
щий к конечному состоянию.
Формирование ДС происходит, как правило, по пути само-
достройки структуры: после возникновения первого пика следую-
щий появляется на расстоянии L от него, третий пик на расстоя-
нии/. от второго и тд. Это явление было замечено уже в первых
экспериментальных работах с ДС [81, 268j. Оно может быть объяс-
нено на качественном уровне.
Пусть в длинной системе создан пик распределения х на фоне
стационарного однородного состояния (см. рис. 7.12, где представ-
лены проекции распределений переменных на фазовую плоскость
модели ’’брюсселятор” для Последовательных моментов времени).
Движения проекций пика будут направлены, как показано стрел-
ками (Fx >0, Fy < 0). В силу малости Dx проекции участков пика
будут удаляться от х-нуль-изоклины. Поскольку Dy велико, то на
масштабе Lp проекции близлежащих областей будут двигаться
вниз от особой точки и, попав в область с Fx < 0, переходить на
левую ветвь х-нуль-изоклины. Вдоль этой ветви возможны только
движения к точке экстремума х-нуль-изоклины. В областях, проек-
ции которых достигли экстремума, начинается формирование
следующего пика и т.д. до тех пор, пока вся система не будет за-
нята ДС.
177
У
У
УпЛп
ГТ "ГГ г°
ГТД Г %
\ “ — *2
''ч.____•Z’-O
•^тох
О
1
‘Z’min
а
Рис. 7.12 Самодостройка ДС в модели "брюсселятор"
Оценку величиныyt можно получить для систем с тх!ту 1,
в которых она принимает значение, соответствующее максимально
возможной величине Lp при утах = Уэкстр-
От начальных условий зависят только времена формирования
первого и второго пиков, в дальнейшем система ’’забывает” началь-
ные условия полностью и структурированная область расширяется
с постоянной скоростью. Таким образом, само становление ДС яв-
ляется АВП, аналогичным распространению БФ или волнам фазо-
вых переходов.
Если ’’распространение” ДС происходит в системе с конечной
длиной L, то значение последнего периода, как правило, будет
178
отличаться от автомодельного значения (L/Lp = к,к. — целое чис-
ло). Начинается процесс выравнивания периода структуры, при-
чем характерное время этой стадии много больше времени само-
достройки.
Обратим внимание на то, что в численных экспериментах вто-
рая стадия может не наблюдаться, если периоды, получившиеся
после самодостройки ДС, различаются незначительно. В этом
случае необходимо проверить выполнение условий непрерывнос-
ти среды (1.1), представленных в форме (7.26). Если оказалось,
что они не выполнены с точностью до ’’машинного нуля”, то вычис-
ления должны быть продолжены после увеличения числа элемен-
тов N дискретной модели. Если на некоторое время включать в
модель ’’случайные” силы, то процесс установления периодичес-
кой ДС завершается относительно быстро. Естественно, число N
должно быть кратным к.
Само достройка ДС имеет место и в случае прямоугольных ДС.
В этом случае х-нуль-изоклина имеет два экстремума и розможны
два типа процессов. Первый тип не отличается от описанного
выше, а в случае второго самодостройка выглядит следую-
щим образом. Фронт импульса движется в сторону свободной
среды, т.е. плато импульса увеличивается. Затем на плато
образуется провал и вновь образовавшийся элемент структуры
удаляется от места своего зарождения, его плато начинает
расширяться и т.д. Итак, становление прямоугольных ДС
происходит так же, как и АВП.
Механизмы самодостройки ДС действуют в широкой области па-
раметров системы; в численных экспериментах с контрастными
ДС [22] самодостройка наблюдалась и при ждущей, и при автоко-
лебательной, и при триггерной точечных кинетиках системы. Она
протекает и при формировании квазигармонических ДС, т.е. в сис-
теме при Dx <С Dy [51]. Причем становление таких ДС включает
две стадии: а) относительно быстро образуется последовательность
пиков; б) распределения переменных сглаживаются и приобретают
квазигармоническую форму. Этот путь формирования ДС осу-
ществляется не только при докритических значениях параметров
системы (В < 5кр; см. рис. 7.46): даже тогда, когда условия са-
мовозбуждения ДС выполнены (В > Вкр; см. рис. 7.4а), он оста-
ется вероятным. Дело в том, что при малом значении амплитуды
мод скорость их нарастания экспоненциально мала и в не слишком
длинной системе волна самодостройки успевает достигнуть ее гра-
ницы до того момента, когда неустойчивость среды приведет к
разрушению однородности системы.
Сравнивая контрастные и квазигармонические ДС, отметим,
что различия между ними носят скорее количественный, чем ка-
179
явственный, характер. Изучение обоих видов ДС, так сказать,
предельных случаев, позволяет распространить полученные резуль-
таты на ДС с произвольными формами, для которых исследова-
ния моделей не представляются возможными (см. также [77]).
7.5. Диссипативные структуры
в системах со взаимной диффузией
Как было показано в гл. 3 и 5, для модели! с недиагональной
матрицей диффузии требования к точечной кинетике могут быть
ослаблены существенным образом, и вместе с тем система будет
оставаться автоволновой. В отношении ДС это утверждение может
быть продемонстрировано наиболее наглядным образом. Рассмот-
рим модель (2.55). Она представляет один из наиболее простых
примеров термодинамических открытых систем. Ее параметры
имеют простой физический смысл: параметр А определяет ’’накач-
ку” энергии (вещества) в систему, ар- ’’уход” энергии в окру-
жающую среду. Отношение А/p задает уровень положительной об-
ратной связи в системе.
Фазовая плоскость точечной системы (2.55) представлена на
рис. 7.13 для случая А > р. При этом особая точка х = 0, у = 0 яв-
ляется седлом, а точка х - (А/р — 1)В, у = Вх/р — устойчивым
узлом. Если А < р, то особая точка является устойчивым узлом
и в первом квадранте отсутствуют особые точки. Понятно, что при
Рис. 7.13. ДС в модели со взаимной диффузней компонентов (2.55).-фазовая
плоскость (<7), типичная зависимость Dxy от ’’своей” переменной х (б),
стационарные распределения (в)
180
любых значениях параметров модели имеются только тривиальные
решения. Более того, такая фазовая плоскость, казалось бы, ука-
зывает на бесперспективность системы и в отношении АВП.
Рассмотрим устойчивость однородного состояния, предполагая,
что А > р (§3.3). Поскольку ЛЛ! = -В(2А/р - 1) < 0 иЛ/22 =
= -р < 0, то при любых Dxx, Dyy и Dyx = Dxy = 0 стационарное
состояние является устойчивым (3.8). В общем случае свободный
член характеристического уравнения представляется в виде
(к2 = rffc2/Z2)
Яо (к ) “ к (PxxDyy ~ DxxDXy)+
+ к1 [Dxxp + Dyy (2А/р — V) + DyxA + BDxy] + (A-p)В. (7.33)
Для стабильных диффузионных процессов выполняется нера-
венство det (Ptf) > 0, а поскольку А > р, то ДС-неустойчивость
возможна только тогда, когда Dyx и Dxy < 0 (q0(к2) < 0). Более
того, если Dxy и Dyx отрицательны, то всегда можно найти Акр
такое, что при А > Акр пространственно однородное состояние
системы неустойчиво.
Пусть, например, В = 0,1; р = 1; Dxx = 2,4; Dyy = 1,2; Dyx(y ) =
= -0,8; Dxy(x) = —0,4. Условия ДС-неустойчивости выполняются
для к2 G (x'min, «’шах) при А > Лкр= 6. Интервал значений допусти-
мых волновых чисел быстро растет при увеличении А, т.е. при по-
вышении уровня ’’накачки”.
Для изучения стационарных решений системы (2.55) проводи-
лось ее численное интегрирование при А > Акр. Зависимость коэф-
фициента взаимной диффузии от переменных была выбрана в виде
кусочно-линейной функции (рис. 7.136). Такие функции Dxy(x)
допустимы с позиций теории диффузии (см. § 2.2) и обеспечивают
существование стационарных решений конечной амплитуды
(рис. 7.1 Зв).
Зависимости Dxy и Dyx от переменных играют важную роль в
существовании ограниченных решений. Если Dxy не обращается
в нуль при х = 0, то эта переменная может принимать отрицатель-
ные значения и решение будет неограниченно возрастающим. Ли-
нейная и ей подобные зависимости также приводят к неограничен-
ным решениям, причем с некоторого момента становится
det {Dff} < 0. И только физически обоснованные зависимости
(Dxy(0) = 0 и | Dxy (х) | < Dxx) гарантируют существование ус-
тойчивых стационарных решений.
Системы типа (255) не могут быть сведены к форме моделей
с диагональной матрицей диффузии даже в случае постоянных
Dyx и Dxy; переходя к базисам из собственных векторов линеари-
зованных задач (так же, как в § 5.4), можно получить одинаковые
181
по форме представления для таких задач, но для (2.55) они соот-
ветствуют модели с физически нереализуемой точечной кинетикой.
Вероятно, что ДС модели (2.55) будут иметь свойства, отличные
от рассмотренных ранее. Действительно, уже вблизи точки первой
бифуркации решения (255) имеют сложную форму, так что'квази-
гармонические ДС не наблюдаются вовсе. Контрастные ДС также
не существуют в этой модели. В отношении формы стационарных
распределений переменных обсуждаемые ДС занимают промежу-
точное положение между контрастными и квазигармоническими
ДС. Каких-либо особенностей в поведении и характеристиках
этих ДС не было обнаружено. Наиболее интересным представляет-
ся сам факт возможности ДС в системах с такой простой точеч-
ной кинетикой.
7.6. Локализованные диссипативные структуры
В однородных системах, рассматривавшихся выше, пространст-
во полностью занято ДС. АВП самодостройки ДС обеспечивает
такое заполнение даже в тех случаях, когда однородное состояние
устойчиво к малым возмущениям, но решения в виде периодичес-
ких ДС существуют. Проблема, обсуждаемая далее, состоит в на-
хождении условий, выполнение которых гарантировало бы су-
ществование локализованных решений системы вида (1.1) —(1.3).
Минимальные требования к таким ДС формулируются следующим
образом. Локализованная ДС должна быть независимой от разме-
ра системы, устойчивой и ’’слабо” взаимодействовать с другими
такими же ДС, если расстояние между ними превышает порого-
вое. В полной мере проблема еще не решена, и мы обсудим толь-
ко отдельные подходы к ней.
Локализация. области, занятой ДС, может быть обеспечена за
счет пространственной неоднородности системы. В монографии
[145] проведено детальное исследование брюсселятора (2.54).
Неоднородность задавалась следующим образом: для параметра В
(или А) записывалось диффузионное уравнение с ненулевыми
граничными условиями первого рода и не зависящее от перемен-
ных самого брюсселятора. Основным результатом явилось то, что
ДС с точностью до половины волны захватывает ту часть простран-
ства, в которой значения параметров соответствуют условиям су-
ществования ДС в гомогенной системе, т.е. в неоднородной систе-
ме ДС действительно локализуется. Так же, как и в однородной
системе, в ней имеется множе. тво состояний, выбор между кото-
рыми определяется начальными условиями. Подобные системы
нельзя считать автономными. Образно говоря, здесь ДС только
контрастирует распределение источников в среде.
182
Рис. 7.14. Типичная локализованная ДС в
модели ’’орегонатор” (5.4): Dx = 0, v= 1,
у = 0.5,р = з = 500, к = 1, q = а, т = 0,5,
с = 1,РГ= 0,05
Рис. 7.15. Локализованная ДС в модели
’’брюсселятор” (случай £-*=«)
В однородной, автономной среде квазигармонические ДС,
очевидно, невозможны, т.е. следует рассматривать контрастные ДС.
Завершим обсуждение орегонатора (5.4), начатое в § 7.4*). Пусть
теперь особая точка находится на участке А нуль-изоклины
автокаталитической переменной х. Такая точечная кинетика га-
рантирует устойчивость однородного состояния при любых Dx
к Dy.
Пусть Dx = 0 и в результате мощного локализованного возму-
щения небольшая часть системы оказалась в состоянии, соответ-
ствующем участку Б. Возвращение этой области в исходное состоя-
ние невозможно. Действительно, локальная кинетика стремится
уменьшить значение переменной у в этой области, но поток из ос-
тальной части системы, находящейся в А, компенсирует этот про-
цесс. Поскольку Dx = 0, переход из состояния £ в состояние А при
у (г) > Уб невозможен. Таким образом, устанавливается распреде-
ление, показанное на рис. 7.14.
•) Так же, как в случае 1 § 7.4, здесь мы переобозначили переменные
х ну в (5.4).
183
Не представляет трудностей построить обсуждаемое решение
аналитически,
Процедура в случае 1 (см. § 7.4) для Dx = 0 полностью при-
менима и здесь; также остаются в силе и выводы: для любых
значений параметров модели найдется такой интервал длин,
что любые, более короткие возмущения будут приводить к об-
разованию неоднородностей, причем допустимы произвольные
сочетания неоднородностей по длине системы (важно только,
чтобы расстояния между ними превышали пороговые). Итак,
если Dx = 0, то допускаемое бесконечное множество решений
соответствует требованиям, предъявляемым к локализован-
ной ДС.
Если Dx не равно строго нулю, но все же е = DxIDy < 1, то
у (г) = ур в области перехода (резких распределений) уже нельзя
выбирать произвольно, так как должны быть выполнены условия
(7.29). Повторив соответствующие рассуждения §7.4, можно по-
казать, что для системы длиной L существует единственное одно-
родное стационарное решение.
Для моделей типа ’’брюсселятор” при Dx = 0 также существует
единственное решение (рис. 7.15), которое будет однопичковым.
Можно показать его устойчивость в ненулевой области параметров
модели, но не это представляется сейчас важным.
Такое решение, какую бы малую часть системы ни занимал пи-
чок, нельзя считать локализованным: фактически оно занимают
всю систему целиком, так как второй пичок поместить в систему
нельзя. Тем не менее такие модели имеют определенную ценность
в исследованиях локализованных ДС. Действительно, при наруше-
нии условия (7.29) (или (7.32)) рассогласование решений не
превышает по порядку величины %/Г= xjDxfDv < 1, а времена
переходных процессов велики порядка 1/е. Поэтому такие
состояния можно считать метастабильными локализованны-
ми ДС.
Возвращаясь к случаю Dx = 0, следует отметить, что он не реали-
зуется в континуальных системах. Однако для клеточных систем
в биологии он представляется вполне реальным (см. §2.5). Зави-
симость Dx от х может приблизить континуальную модель к систе-
ме с Dx = 0.
Нам неизвестны результаты для систем со сложной точечной
кинетикой и Dx(x). Тем более представляется интересным рас-
смотреть наиболее простой класс таких систем — систем с одним
компонентом. Возможно, сочетание этих систем и рассматривав-
шихся выше позволит существенно расширить разнообразие АЁ-
процессов.
184
Метастабильные диссипативные структуры в
однокомпонентных системах
Рассмотрим структуры, которые могут образовываться в нели-
нейной горящей среде. Хотя зти структуры, если и образуются,
живут недолго и, по существу, нестационарны, сам факт их пред-
сказания и подробного изучения на простейшей математической
модели весьма интересен.
Дальнейшее изложение проводится согласно работам Самарско-
го, Курдюмова и их учеников, которые открыли и всесторонне
исследовали закономерности нелинейного горения в виде струк-
тур [57,78, 126,166, 167].
Простейшая математическая модель основана на одномерном
квазилинейном уравнении теплопроводности (§ 2.2)
ЪТ 9 [ 9Т1
— =— к (Г)---------
dt dr L Эг
+ QT,
(7-34)
где к (Т) = к.0Т°, Q(T) = q0T&, к0 > 0, q0 > 0, о > 0, 0 > 1.
Постоянные к0, q0 можно без ограничения общности приравнять
единице. Это означает переход к другим единицам измерения
времени, длины и температуры. Для дальнейшего существенна не-
линейная зависимость источника теплоты и коэффициента тепло-
проводности от температуры. При этом определенным о и 0 отве-
чают интересные и необычные свойства рассматриваемого про-
цесса.
Горение инициируется заданием начального симметричного
относительно начала координат профиля температуры То 0) • Даль-
нейшее пространственное распределение температуры находится
из решения следующей задачи для уравнения (7.34) :
Т 0,0)= То (г), 0 < г < +°°,
0<ТоО)<~.
lim То 0) = 0,
(7.35)
Т,'(0,г)=0, Um ТО, 0 = 0, lim к(Т)Тг' = 0. (7.36)
у -+ оо у —> ОС
Решение задачи (7.35)-(7.36) может не обладать гладкостью там,
где Т(г, 0) = 0. На фронте тепловой волны градиент температуры
может быть ограниченным. В связи с этим различают два случая.
В задаче А начальное распределение финитно:
Г (г, 0) =
ГоО)>О
о
для 0 < а,
для г > а,
(7.37)
и температура определяется на отрезке переменной длины
rF(t), а закон движения теплового фронта — из условий непре-
185
рывности температуры T(rF(t), t) и теплового потока
K[T(rF(0,0 r;(rF(0>0] =о.
В задаче Б начальное распределение отлично от нуля во всем
пространстве, Т(г, 0) = То (г) ¥= 0. Выделение задач А и Б не имеет
принципиального значения и приводится для удобства исследова-
ния и формулировки результатов.
Как отмечалось, стационарные диссипативные структуры обла-
дают свойством пространственной симметрии. Бегущие импуль-
сы — свойствами инвариантных или приближенно инвариантных
решений типа бегущей волны. В данном случае ищутся устойчи-
вые инвариантные или приближенно инвариантные решения для
режимов с обострением (или метастабильных ДС). Нестационар-
ный процесс нагрева называется режимом с обострением, если
температура обращается за конечный интервал времени в беско-
нечность по крайней мере в одной точке пространства. В частнос-
ти, режимы с обострением описываются автомодельными решения-
ми вида
T[r,t) = g{t, т)0 (Lr)^0, t = np-l(t,T), (7.38)
при условии, что g(t, т) = (1 - tr~')~7, т) = (1 — tr~')a,
у = (3 — I)-1, а = 0,57(3 - о — 1). Функция 0 (£, т) #= 0 является
нетривиальным решением краевой задачи для автомодельного
профиля:
(0ст0^)'г - - 0> - - 0+0^ = 0. (7.39)
т т
В случае зада’ л А граничные условия имеют вид
0^(0) = 0, 0(д) = О, 0° (д)0^ (д)=0. (7.40)
В случае задачи Б
0^(С)=О, lim 0(?)=О. (7.41)
i -* ~
Задачи (7.40) и (7.41) являются задачами на собственные значе-
ния т и определяют искомые собственные функции 0 (О г), кото-
рые описывают распределение температуры в метастабильных ДС
режимов с обострением. Временной характер режима определяется
знаком собственного значения т. Именно т > 0 и соответствующая
ему собственная функция определяют автомодельные решения с
обострением. Отрицательное т < 0 вместе с собственной функци-
ей определяют автомодельные решения, существующие для любо-
го момента времени t > 0..
Анализ собственных функций нелинейной задачи приводит к
следующим выводам:
1. Если 1 < 3 < о + 1, то горение среды всегда происходит в ре-
жиме с обострением.
186
Рис 7.16. Распространение тепловой
волны в HS-режиме [ 166]
2. При 0 > о+ 1 автомодельная задача Б не имеет нетривиальных
решений. При любом фиксированном значении 0 задача А имеет
единственное положительное собственное значение. Этому значе-
нию соответствует единственная финитная собственная функция.
Такое автомодельное решение описывает тепловую волну так назы-
ваемого HS-режима. Фронт тепловой волны распространяется с воз-
растающей скоростью и за конечное время, равное собственному
значению т (времени обострения), температура во всем простран-
стве становится бесконечной (рис. 7.16).
3. При 0 = о + 1 задача Б не имеет нетривиальных решений, а за-
дача А имеет решение в режиме с обострением лишь прид >Ls/2,
где Lg — фундаментальная длина S-режима с обострением. Это ре-
шение находится непосредственным интегрированием (7.37) с уче-
том граничных условий (7.38):
*(t т) =
0Оcos2/0 (пг/Ьт) при 0CXZ.S/2,
(7-42)
при r>Ls/2,
О
где Lt = 2no-1 (о + 1), 0О = [2(о+ 1) о-1 т-1 (о + 2)-1 ]. Из (7.42)
следует, что горение локализуется на фундаментальной длине L^--
Время существования такого решения определяется амплитудой 0О
начального автомодельного распределения температуры.
4. При о+1<0<о+3 задача А не имеет нетривиальных реше-
ний. Задача Б в этом диапазоне имеет решение при любом г > 0.
При этом каждому значению т соответствует не единственная соб-
ственная функция, а конечное число собственных функций с ка-
чественно различной структурой [78]. В этом LS-режиме темпера-
тура в начале координат возрастает до бесконечности. Фундамен-
I Q
тальная длина LS-режима LT зависит не только от параметров
среды о и 0, но также и от начальной энергии возмущения Wo =aTom,
187
где TOm =max To (г) [125]:
i
LrS = (a2W0o~1-^)o+3-e.
, (7-43)
/2(0 + о + 1)
a = я V ----------- (0 * a + 3).
o(0-l)
Для того чтобы возбудить горение в режиме с обострением, необ-
ходимо, чтобы размер области возмущения а был не меньше неко-
торой резонансной длины (а > L*T) (рис. 7.17). При резонансном
возбуждении время, за которое температура достигает бесконеч-
ных значений, можно оценить по формуле
= (0 + a + О/ [(a + 1) (0 - 1) TQe~1 ]. (7.44)
5. При 0 > a + 3 возможны два режима нагрева среды. Первый
— это режим с обострением и локализацией теплоты, который реа-
лизуется при резонансном задании начальной температуры. Второй
- режим, реализуемый при нереэонансном возбуждении, при кото-
ром существует волна температуры с затухающей амплитудой.
Утверждения 1—5 сделаны на основе рассмотрения автомодель-
ных решений. Возникает вопрос: успевают ли автомодельные реше-
ния установиться за конечное время? Разносторонние исследова-
1 + Ги 6 ।
Рис. 7.17. Лавинное нарастание режима с обострением на границе резонансной
области [125]: кривые 1-6 соответствуют последовательным моментам
времени
188
Рис. 7.18. а - Начальное распределение температуры в случае 0 = 3,18, о = 2,
к0 = г?0 = 1. б - Развитие структуры из заданного начального распределения
[125J
ния, как аналитические, так и проведенные с помощью машинного
эксперимента, показали, что автомодельные решения HS-, S-режи-
мов, а также первая собственная функция LS-режима являются
асимптотически структурно устойчивыми относительно возмуще-
ний начального распределения.
В среде возможно независимое горение сразу нескольких струк-
тур, если их области локализации не перекрываются. Это относится
прежде всего к резонансно возбужденным структурам, имеющим
одно и то же время обострения и зажженным в один и тот же
момент времени t0. Если же структуры имеют различные времена
обострения, то очень скоро наиболее быстрый ’’факел” затмит все
остальные. Приведем два важных примера. На рис. 7.18а показано
начальное распределение температур, симметричное относительно
начала координат. Расстояние между максимумами возмущений
больше их резонансной длины L Развитие горения среды в этом
случае сопровождается локализацией температуры около каждого
максимума к возникновению двух структур. На рис.’ 7.186 приве-
дены профили распределения температуры T(r, t) в различные мо-
менты времени, которые развиваются из начального распределения,
показанного на рис. 7.18а. Видно, что горение ’’фона” и среды в
области структур развивается из меньшего начального возмуще-
ния и происходит очень медленно по сравнению с горением среды в
структуре, возникающей из возмущения с большей температурой.
Если резонансные длины двух начальных возмущений перекры-
ваются, то между структурами возникает взаимодействие и они
превращаются в сходящиеся волны температуры. Эти положения
189
иллюстрируются данными машинного эксперимента, приведенными
на рис. 7.19. Если же начальные возмущения удалены друг от друга
более чем на резонансную длину L J., то в местах этих возмущений
образуются независимые метастабильные структуры. Штриховые
линии на рис. 7.196 показывают ход максимума температурных
волн, который рассчитан с помощью автомодельных решёний.
В работах Курдюмова, Самарского и их сотрудников описаны
результаты широких машинных экспериментов с двумерными ДС
с обострением. Двумерные структуры при взаимодействии также
имеют критические расстояния, обеспечивающие их независимое
существование. Наиболее устойчивы симметрично разгорающиеся
структуры. Пример такой структуры показан на рис. 7.20. Несим-
метричные начальные конфигурации вырождаются значительно
быстрее.
Итак, о ’’долгоживущей” сложной структуре можно говорить
только, если начальные возмущения составляющих их факелов
идентичны и, следовательно, равны их времена обострения. Так
как реальные системы всегда имеют случайные возмущения фона,
то даже малые выбросы температуры должны приводить к разру-
Рнс. 7.19. а - Начальное распределение температуры - возмущения симмет-
ричны относительно центра системы н расположены на расстояниях, меньщих
резонансной длиныL*f. б - Распространение волны горения при заданных
начальных распределениях [125]
190
Рис. 7.20. Взаимодействие двумерных тепловых структур. Вверху - линии
уровня, ниже - соответствующие тепловые поверхности. Графики соответ-
ствуют трем моментам безразмерного времени: = 0, /, = 5,94 • 10“’,
Г, =6,04-10-’ [127]
шению сложных структур. Следует, однако, учитывать, что па
начальной стадии формирования структуры, порождаемой выбро-
сами равной амплитуды, структура существует (см. рис. 7.186).
При достижении какого-либо из факелов (наиболее быстро расту-
щего) завершающей стадии обострения другими уже можно прене-
бречь. Вспомним, что и ДС в однокомпонентных системах неустой-
чивы (см. § 3.4). Однако учет второго компонента приводит к
стабилизации ДС.
В заключение выскажем следующие предположения. Наиболее
вероятно, что прогноз описанных явлений важен при изучении про-
цессов пространственной самоорганизации и эволюции в космого-
нии, лазерной плазме, а также в термоядерных реакторах и лазер-
ной термохимии [38]. По всей видимости и в моделях ДС тканей
нелинейная диффузия играет важную роль и описывает активный
транспорт через биологические мембраны. Если в таких моделях
присутствуют также члены, ответственные за автокатализ, то впол-
не можно ожидать, что они смогут обладать свойствами, подоб-
ными режимам с обострением, или описывать метастабильные ДС.
191
ГЛАВА 8
ШУМЫ И АВТОВОЛНОВЫЕ ПРОЦЕССЫ
Основные кинетические уравнения (1.1) АВП получаются в ре-
зультате статистического усреднения. Действительно, ’’концентра-
ции” или ’’скорости” изменения кинетических переменных являют-
ся некоторыми средними величинами. В принципе любой детерми-
нированной модели соответствует стохастическая модель, в кото-
рой кинетические взаимодействия выражаются через вероятности
элементарных событий, происходящих за малые интервалы време-
ни и в малых элементарных объемах. При усреднении, когда число
реагирующих объектов (молекул, живых организмов) велико,
шумы, происходящие за счет дискретности взаимодействий, малы.
В дальнейшем мы будем называть их ’’естественными” шумами.
Однако в системах с малым числом взаимодействующих объектов
роль шумов может существенно возрасти. Именно к таким систе-
мам относятся экологические сообщества, системы с участием
генов и органелл внутри отдельной живой клетки. Даже малые
шумы могут оказать заметное влияние и в системах с большими
концентрациями, но близкими к своим точкам бифуркации. Также
существенно влияние естественного шума и на системы, обладаю-
щие свойствами мультистационарности. Интересно отметить, что
в релаксационных автоколебательных химических реакциях даже
при огромном (за период) числе взаимодействующих молекул
за отдельные отрезки времени концентрации реагентов могут па-
дать на много порядков. При этом роль естественных шумов резко
возрастает [81,163].
Помимо естественных шумов, при кинетических взаимодейст-
виях присутствуют внешние шумы, интенсивность которых может
быть значительной. Они возникают за счет флуктуаций внешних
параметров, таких как температура, освещенность и т.п.
Наконец, источниками шумов в активных распределенных
системах могут явиться автостохастические процессы разного вида
[59, 124]. К ним относится и возникновение режимов странных
аттракторов, и появление химической и гидродинамической турбу-
лентности. Последняя может явиться следствием химических
192
превращений или жизнедеятельности микроорганизмов [240].
Автостохастические источники разнообразны по своей природе, но
все они могут иметь значительную интенсивность. Кроме того,
сложные переходные процессы могут внешне выглядеть как авто-
стохастические (см. § 5.5). При этом следует помнить, что’’время
жизни” открытых систем часто соизмеримо с временем переходно-
го процесса.
Строгая теория флуктуаций в активных распределенных средах
еще далека от завершения. Однако оценку вклада шума в качест-
венное поведение моделей можно сделать [30, ПО, 111, 142,
163. 1Я7.Д7].
8.1. Источники шумов в активных кинетических системах
и основные стохастические задачи
Представим себе, что мы умеем учитывать естественные и внеш-
ние шумы путем введения в основные уравнения дополнительных
как аддитивных, так и параметрических или мультипликативных
членов. Перечислим, какого рода задачи можно ставить в этих
случаях. 1. Определение статистических характеристик малых слу-
чайных отклонений хода АВП во времени и пространстве. 2. Нахож-
дение среднего времени пребывания системы в одном из возмож-
ных состояний. 3. Определение характеристик флуктуаций кинети-
ческих переменных вблизи точек бифуркации системы. В част-
ности, изучение флуктуаций при зарождении ДС. 4. Исследование
роли шумов в потере устойчивости стационарных состояний или
различных АВ-режимов. например синхронного. 5. Определение
условия вторичной потери устойчивости в кинетических системах
или условия возникновения автостохастических режимов. 6. Изуче-
ние параметрических или мультипликативных флуктуаций в точеч-
ных кинетических системах.
Рассмотрим сначала вопрос об источниках естественных, или
внутренних, флуктуаций в случае, когда в системе осуществляется
полное внутреннее перемешивание и в моделях (1-1) диф-
фузионные члены отсутствуют. Сделаем это на примере
известной системы Вольтерра, описывающей сосуществование
хищников и жертв.
Пусть в некоторые моменты времени популяция состоит
из х жертв (например зайцев) и у хищников (например рысей).
За время dt в сообществе могут произойти следующие события:
1) рождение одной жертвы с вероятностью ах dt; 2) рождение
хищника с вероятностью jiyxdt (это событие происходит
лишь тогда, когда есть ’’пища” х)3) гибель зайца с ве-
193
роятностью уу dt; 4) естественная смерть рыси с вероят-
ностью 6 у dt.
Обозначим через w(x, у, t) вероятность того, что в системе
в момент t насчитывается х зайцев и v рысей. Изменение w за
время dt будет выражаться следующим образом:
dw(x, у, t)
---------= а[(х -1 )w(x -1,у, t) - хw(x, у, Г)] +
Эг
+ Рх [(У - 1 )w(x, у - 1, Г) - у w(x, у, Г)] +
+ ?у[(х + l)w(x + 1,у, t)-xw(x, у, Г)] +
+ 6[(у + 1)н>(х, у +'1, t)-yw(x, у, Г)]. (8.1)
Это так называемая система управляющих уравнений. Для ее
пояснения скажем, что первый член правой части равен произ-
ведению вероятности w(x - 1, у, t) и вероятности перехода
{х — 1, у, t} ->{х, у, t}. Остальные члены истолковываются анало-
гично. Уравнения (8.1) справедливы для всех х и у, если считать,
что w(х, у, t) = 0 в случае х < 0 и у < 0.
Система (8.1) может решаться ”в лоб” с помощью ЭВМ, напри-
мер методом Монте-Карло (см. § 8.4). Существуют и другие спо-
собы изучения вероятностных моделей, например вывод на основа-
нии (8.1) системы уравнений для средних значений и высших мо-
ментов для численности жертв и хищников. Здесь мы покажем
путь, по которому можно перейти от (8.1) к модели с флуктуа-
ционными членами. Для этого сопоставим (8.1) с уравнениями
Колмогорова — Фоккера — Планка при условии, что число особей
в системе много больше единицы (х > 1, у > 1) [163]. Тогда
члены вида
(х + l)w(x ± 1,у, t) —xw(x,y, t)
можно аппроксимировать разложениями в ряд Тейлора
9 1 Э2
+ — [xw(x, у, 0] + 5 —7 [х w(x, у, г)].
Эх 2 Эх
При этом управляющие уравнения (8.1) принимают вид
9и’(х, у, t) 9
---------= - — [(ах - уху) w (х, у, г)] -
ot--------Эх
9
- — [(-by + 0xy) w (х, у, Г)] +
Эу
1 Э2 1 э2
+ 5 т-^[(ах + yxy)w(x,y, Г)]+з —-[(5y + /3xy)w(x,у, Z)]. (8.2)
2 Эх 2 Ъу
194
Это и есть уравнения Колмогорова — Фоккера — Планка. В свою
очередь им можно сопоставить систему флуктуационных уравнений
типа Ланжевена [6, 163]
dx --------
— = ах - уху + V ах + уху $ 1 (/) - (а + уу)/4,
dt
(8.3)
— =-5^+^x+V5j’+0xy Ь(0-(6 +0х)/4,
dt
где £i (О и %2 (О — 6-коррелированные случайные функции вре-
мени, для которых
<Ь(Г)ё/(Г + Г)> = 61,8(7),
<£,) = о (/,/=1,2).
Фактически мы получили известную систему уравнений Вольтерра
с учетом флуктуационных членов. Важно отметить, что, во-первых,
’’амплитуда” флуктуаций меняется вместе с численностями х и у
и, во-вторых, последние члены в правых частях (8.3) (а+7 г)/4 и
(5 + /Зх) /4 также имеют флуктуационное происхождение.
От уравнений Ланжевена (8.3) с помощью усреднения можно
перейти к обычным уравнениям Вольтерра для средних концентра-
ций хиг (или средних чисел жертв и хищников в данный момент
времени). Совершенно аналогично вводятся естественные шумы и
другие уравнения, описывающие химические реакции или взаимо-
отношения в биоценозах.
Отметим еще раз, что при усреднении члены флуктуационного
происхождения пропадают, так как
{у/ах + уху %i(t) > = <(a +yv)/4 >,
_________1 (8.4)
(у/бу +frxy $2(г) > = <(6+0х)/4>.
Поэтому собственные, или естественные, шумы в кинетических
системах, хотя и носят мультипликативный характер, не приводят
к параметрическому возбуждению [141, 177]. Напротив, внешние
мультипликативные шумы могут привести к потери устойчивости.
Покажем это на простейшем примере системы Лотка. Как из-
вестно [245], химическая схема Лотка описывается следующим
образом:
195
Здесь начальное вещество А находится в избытке. Вслед за Лотка
запишем уравнения, адекватные приведенной химической схеме:
dY
— = к0 А - kiXY,
dr
Пусть x(t) и y(t) — малые отклонения от стационарных кон-
центраций
Хо = Ако 1к2, Y0=k2/k1. (8.6)
Применяя обычные для колебательных систем обозначения, запи-
шем линеаризованную систему (8.5) в виде
d v dx
—— = — 28у — ы2х, — = у. (8.7)
dti dt\
Здесь fi = tk2! (кхко), ш2 - 1, 26 = к21(кхко). Если скорости
реакций таковы, что w2 > 6, то точка (Хо, Yo) на фазовой плоско-
сти X, Y является устойчивым фокусом.
Пусть теперь в систему Лотка введены внешние шумы таким
образом, что частота испытывает 6-коррелированные флуктуации.
Тогда систему (8.7) можно записать в виде одного уравнения
(в дальнейшем индекс у rt опускаем) :
d2 у dy
+ 26^- + w2[l+$(f)]j' = 0. (8.8)
Это уравнение, а также нелинейные уравнения с флуктуирующей
частотой в приложении к радиофизике были исследованы ранее
в серии работ (см., например, [177,179]). В настоящее время сно-
ва возник интерес к системам с мультипликативными шумами, но
уже в приложении к кинетическим системам (см. [142, 233]).
В связи с этим мы изложим кратко метод [179], с помощью кото-
рого были впервые получены условия потери устойчивости в урав-
нении (8.8) для случая, когда £ (?) необязательно 6-коррелирова-
на, а имеет некоторое малое время корреляции ткор.
Определим амплитуду А(г) и фазу Ф для решения у(г) равен-
ствами
у (t) = A(t) cos Ф, dv/dt = — A(t) sin Ф
(8.9)
(Ф = wf + <р(г)).
196
Тогда из (8.8) получается следующая точная система уравнений:
dA 1
-----= sin Ф cos Ф - 2 6 sin2 Ф,
dt А
чу , (810)
dt
Будем предполагать, что интенсивность флуктуаций £(/) не слиш-
ком велика, а именно, что она не приводит к большим изменениям
амплитуды в течение периода Т= 2-п/ы. Тогда
<£2 >1/2 < 1 При ткор Т,
w1/2[k(0) + k(2w)]'/2<1 при ткор < Т. ( -11)
Здесь к(2о) означает половину спектральной плотности £ на
частоте 2со:
к(2со) = J <££,•> cos (2 сот)с/т.
------------- ОО1
Усредняя уравнения (8.10) за период, получим следующую
систему укороченных уравнений:
du/dt = m, - 6 + £1(г),
(8.12)
d^/dt = m2 + Ь(О,
где ы = 1пЛ, mi =соsinФcosФ> ='/8w2k(2w),
m2 = < £ cos2 Ф) = 0, = со£ sin Ф cos Ф - ,
?2 = <о£со52Ф - т2. Обозначим'/всо2к(2со) = 2/Х( /Дсо2 [к(0) +
+ % к(2 со)] = 2/К2.
Если наблюдение за системой (8.12) вести в течение времени,
значительно превосходящего ткор функции £(Г), то изменение
Л (Г) и <p(t) можно представить как марковский процесс. Это зна-
чит, что корреляционные функции для и Ь можно заменить
на 6-коррелированные, т.е. на 2К7'6(т) и 2К2хд(т) соответ-
ственно, а также воспользоваться уравнениями Колмогорова —
Фоккера - Планка. Именно, первому уравнению (8.12) поставим
в соответствие уравнение для плотности вероятности w(u, t) :
Эи» , d2w div
— = К-1 —- - -6)— .
dt Эм2 ди
(8.13)
197
Решение (8.13) при начальном условии и» (и, 0) = 6 (и) имеет вид
w(u, t) = \/Кг /irt ехр{ -Ki [и -(rrii - 6) г]2/t}. (8.14)
Отсюда заключаем, что среднее значение (и) = <1пЛ > стремится
к +°о при выполнении условия
mt = w2k(2co)/8 > 6. (8.15)
И наоборот, < 1пЛ > стремится к —<» или А ->0 при выполнении
противоположного неравенства. Легко также показать, что предел
вероятности
lim Р(А > b) -> 1, (8.16)
t -> “
где b — любое положительное число. Следует отметить, что условие
параметрического шумового возбуждения обусловлено спектраль-
ной плотностью флуктуации на удвоенной собственной частоте
системы, т.е. в среднем осуществляется основной параметрический
резонанс. Чтобы рассчитать возбуждение на других частотах,
следует перейти к высшим приближениям.
В работах [177, 179] был рассмотрен случай параметрического
возбуждения нелинейной колебательной, а точнее, потенциально
автоколебательной системы, которая описывается уравнением вида
rf2^ , dy .
—- + 2(8 + ау2) — + w2(l = 0. (8.17)
dt dt
Амплитуда A(t) для этой системы может быть найдена из укоро-
ченного уравнения
— = (w?i - 3)Л - аЛ3+£, (г)Л. (8.18)
dt
Решая соответствующее (8.18) уравнение Колмогорова — Фок-
кера — Планка, получим формулу для стационарного распределе-
ния амплитуд:
2 / а \1-б/к
w(A) =------I--)
ru-s/KjUJ
1-26/К, -аЛ’/К,
А е
(8.19)
Здесь Г - гамма-функция. Ес.'И условие возбуждения (8.15) не
выполняется, то w(A) имеет неинтегрируемую особенность в нуле,
т.е. система не возбуждена и слабо флуктуирует около устойчивого
состояния равновесия. Если же mi > 3, то распределение w(A)
198
имеет вид, близкий к рэлеевскому, а средняя амплитуда Имеет
конечное значение. В § 8.7 будет показано, что переключение от
невозбужденного к возбужденному состоянию под действием
параметрического шума можно рассматривать как фазовый
переход.
Подведем итог сказанному. В системе с естественными шумами
не возникает параметрической неустойчивости. В системе с внешни-
ми мультипликативными шумами такая неустойчивость появляет-
ся, порог возбуждения зависит от интенсивности шума и декремен-
та затухания системы. К этой проблеме в приложении к распреде-
ленным системам мы еще вернемся в § 8.7. Сейчас же обратимся
к другому эффекту, к которому могут привести как естественные,
так и внешние шумы.
8.2. Среднее время существования
простейшей экологической системы хищник — жертва
Если в классической модели Вольтерра не учитывать флуктуа-
ций, то в зависимости от начальных условий на фазовой плоскости
изменения численности жертв и хищников будут изображаться
замкнутыми траекториями (рис. 8.1). Причем при определенных
начальных условиях интегральные кривые могут близко подходить
к осям абсцисс и ординат. Ясно, что при х и у ~ 102 -г 103 обычные
уравнения Вольтерра теряют смысл. Если же учесть естественные
флуктуации, всегда существует вероятность того, что число жертв
или хищников станет меньше некоторого критического значения,
которого уже недостаточно для воспроизведения потомства. Будем
трактовать среднее время существования Тсущ системы Вольтерра
как среднее время достижения этой критической границы. Эта гра-
ница обозначена на рис. 8.1 штриховой линией. Для определенности
Рис. 81. Фазовая плоскость системы Вольтер-
ра. Штриховой линией условно обозначена
граница вырождения
199
будем считать, что начальное положение изображающей точки
совпадает с особой точкой системы (в данном случае ’’центром”).
Система Вольтерра без учета флуктуаций имеет интеграл движения
вида
Я =а[7_у/а-1-1п(7у/а)]+6[/Зх/6-1-1п(0х/6)]. (8.20)
Положению равновесия (центру) соответствует минимально воз-
можное значение R = 0, причем х = 5/0 и у = а/у.
Наличие флуктуационных членов в (8.3) приводит к тому, что
в процессе движения интеграл R(t) будет меняться, причем, если
интенсивность флуктуаций мала, то R(t) будет медленной функ-
цией времени. Тогда для R(t) можно получить усреднением за
период некоторое укороченное уравнение. При этом Гсущ будет
определяться средним временем достижения R(t) некоторого гра-
ничного значения RTp. С другой стороны, при определении Тсущ
можно исходить из двумерного уравнения Колмогорова — Фокке-
ра — Планка (8.2). С помощью специальной замены переменных
и опять же усреднением за период.можно от уравнения для двумер-
ной плотности вероятности w(x, у, t) перейти к уравнению для од-
номерной плотности w(p,t). Проведем данную процедуру*).
Для этого, положив предварительно
ti = t^/a8, х = 6/0, у = а/у,
Xi =х/3/8, yi=yy/a, а = \/а/8,
получим уравнение (8.2) в виде
------------------------— И1 (*ь У ।) w(xi, у, г)] +
и 11------------ОХ ।
э
+ ;—1^2(^i.J'i)m'(x1,^1> h)] +
1 d2
+ ~ [5i(xiJi)wUiJi, П)] +
2 dx t
1 Э2
+ ~ —2 [B2(xi,j’1)w(x1.y1, ti)], (8.21)
2 ду\
*) Данное рассмотрение принадлежит Алексееву и Костину [6].
200
где Ai(xi,yi) = axi(l-yi), A2(xit у j) = a'y j(l - Xi),
£1(Х1,У1)= axt(l +yi)/x, B2(xi, У1) = У1(1 +Xi)/(ay).
Введем новые переменныеp = p(xI,yI), ip= tp(xlt yt). При этом
ip)
w(xl,yi) = w[p,p]-^------- (8.22)
d(*i, yi)
В качестве функции р (хь уг) выберем интеграл движения (8.20),
который в переменных хj, у i, а имеет вид
Р(х1,у1) = а[у1 - 1 - InyJ + a1 [хт - 1 -InxJ. (8.23)
Функцию tp(xi,yi) выберем в виде
^>(х1,у1) =
= -х [х.1 +ln(Xi- I)2] + у [У! + ln(j!- I)2]. (8.24)
После усреднения (8.21) за период Т вдоль траекторий усред-
ненной системы Вольтерра получим уравнение Колмогорова - Фок-
кера — Планка, зависящее лишь от р:
dw(p, t) д 1 д2
= — [F(P>] + - —2 [G(p)w]. (8.25)
oti op 2 op
Здесь
1 r/l+x l+y\
F(p)=- — / ------ + ----)dt,
2T о \ xx yy 1
rf(i о2
G(p) = f
* 0
axx
fl(l +x)(y - I)2]
УУ J
(8.26)
Интегралы в (8.26) понимаются как взятые вдоль траектории,
соответствующей данному значению параметра р = р(х, у); для
получения искомой приближенной оценки Тсу1Ц нужно определить
среднее время достижения марковским процессом p(^i), который
описывается уравнением (8.25), поглощающей границы ргр. Грани-
цу р = 0 следует считать отражающей. Величина ргр условно выбра-
на из тех соображений, что на траектории, ей соответствующей,
численность х ил и у может стать равной единице.
Для одномерного марковского процесса значение Tcyui хорошо
известно [177] и выражается формулой
~рУр ?гр
^сущ ~ 2 J f
о о
г
X G(p)
G(x)
dydx.
(8.27)
201
Таблица 8.1
Среднее время существования системы Вольтерра,
выраженное в периодах Т
X, у а
0,125 0,50 1,00 2,00 8,00
10, 10 0,13 0,45 0,76 0,45 0,13
10, 100 0,64 2,2 1,4 0,65 0,17
10, 1000 1,1 4,0 1,5 0,70 0,19
100, 10 0,17 0,65 1,4 2,2 0,64
100, 100 2,7 8,8 15 8,8 2,7
100,1000 9,7 33 29 12 2,7
1000, 10 0,19 0,70 1,5 4,0 1,1
1000, 100 2,7 12 29 33 9.7
1000, 1000 35 130 220 130 35
качественно судить о зависимости Тсущ от параметрам = и от
численностей х и у , определяющих положение особой точки р~ О,
можно с помощью табл. 8.1. Легко заметить, что
^сУщ(а,х,у) = Тсуш(а~1,х,у).
Параметр а определяет вытянутость эллиптических траекторий
вблизи положения равновесия (см. рис. 8.1). Величина VaS опре-
деляет круговую частоту (или период Т) в окрестности х, у . Время
существования в табл. 8.1 выражено в долях периода Т.
Из таблицы следует, что естественные флуктуации в сообщест-
вах, насчитывающих до тысяч особей, приводят к вырождению за
времена порядка 10 т 100 периодов. Устойчивость системы выше
для случаев, когда а ~1, т.е. когда траектории на фазовой плоско-
сти близки к окружностям. Хотя приведенные оценки не претен-
дуют на высокую точность, они указывают принципиальную важ-
ность учета естественных шумов в системах с небольшим числом
взаимодействующих элементов. В следующих параграфах мы пока-
жем это на распределенных моделях.
8.3. Естественные шумы в распределенных системах
и пространственная самоорганизация
Какую роль играют флуктуации разной природы в процессе
самоорганизации структур? В принципе все, что сказано по этому
поводу для точечных систем, применимо и для распределенных.
Однако пространственные флуктуации вносят свою специфику.
202
В настоящем параграфе мы обсудим, как из естественных шумов
рождаются диссипативные структуры; иными словами, посмотрим,
как ведут себя открытые распределенные системы с малым числом
взаимодействующих элементов. Можно думать, что вблизи порога
самоорганизации начинают проявляться когерентные свойства во
флуктуациях как во времени, так и в пространстве. Чтобы пока-
зать, как зто происходит, обратимся к классической системе —
брюсселятору (см. (2.54)).
Будем считать одномерный реактор, в котором осуществляется
цепочка кинетических взаимодействий, разделеннымнаДГодинако-
вых элементарных объемов. Для описания теперь уже дискретной
системы перейдем от концентраций к числам в объемах (или
’’ящиках”) :xj, yi,Ai ~А, Bt = В (i= 1,2,... ,N). Аналогично тому,
как это уже делалось в точечной модели (8.1), введем в рассмотре-
ние 27V-мерную функцию распределения:
w(x, у, t) = w(xb х2,..., xN,y j ,у2,... ,yN,t)
- вероятность того, что в момент времени t в первом ящике нахо-
дится Xi молекул веществах, ух молекул веществау ит.д. Эволю-
ция функции w на малом промежутке времени dt определяется
элементарными актами реакций в каждом ящике и диффузионны-
ми переходами между соседними ящиками: за счет реакций [145,
187]
w(x,- -> X, + 1) = A Xi dt,
w(Xi, yi ->x, - 1, у, + 1) = ВХ} dt,
w(*t,yi^Xi + 1, yi - 1) = X;\Xi - l)y, dt,
w(Xi ->X| + 1) = x,- dt,
за счет диффузии вещества х
dxXidt = w(Xi,xi+x -*х,-~1, х/+1 + 1) =
= «(х,-,х/+1 ->х,- 1, х,_! + 1),
и'(Х1,х2 ->Х! - 1, х2 + l)=dxxx dt,
w(xN__x,xN-+xN_x + 1, xN_x - l) = dxxNdt.
(8.28)
(8.29)
Аналогично выписываются вероятности переходов с участием
веществау. Здесь dx = Dxy N2 IL2; длина реактора в дальнейшем
считается равной единице.
Производная dw(x, у, t)/dt определяется по таким же правилам,
что ив (8.1) (а именно, слагается из баланса скоростей всех упомя-
нутых а переходов). В результате получаем управляющее, или
фундаментальное, уравнение (см. [261 ]).
203
Как аналитическое, так и численное решения фундаментального
уравнения весьма затруднительны. В нашем случае приходится
обращаться непосредственно к машинному эксперименту, точнее
говоря, к осуществлению на ЭВМ моделирования переходов соглас-
но схеме (8.28) — (8.29) по методу Монте-Карло.
Схему (8.28) — (8.29) можно модифицировать так, чтобы она
могла описывать и детерминистический процесс. Для этого в левых
частях равенств вместо изменений вероятностей надо записать
сами изменения. Например, вместо w(x,-->х, + 1) = Ax,dt будет
dXi-Axjdt. Такая схема является просто дискретной формой
записи уравнений распределенного брюсселятора. Если параметры
в’-детерминистической и вероятностной схемах одинаковы, то
можно сравнивать детерминистический и статистический процессы.
Это обстоятельство существенно облегчает проведение численных
экспериментов. Ниже приводятся результаты численных экспери-
ментов, проведенных Асташкиной [ 14] Параметры А, В, dx,dv, N
выбирались из следующих соображений. 1) значения параметров
должны соответствовать седловому типу неустойчивости однород-
ного состояния системы, при котором возможно существование ДС,
или же вблизи тьюринговых бифуркаций (см. § 7.2); 2) чтобы
избежать возможных периодических во времени решений, следует
выбрать В <А2 + l,Dy> Dx; 3) число ячеек# должно быть таким,
чтобы на половину длины ’’волны” излучаемой моды ДС приходи-
лось 5 — 10 ячеек; 4) число ’’молекул” в каждой ячейке должно
быть порядка 10 — 100. Опишем результаты некоторых экспери-
ментов.
а) При моделировании сравнивались скорости двух процессов:
детерминированного развития из близкого к однородному началь-
ного состояния, согласно уравнениям распределенного брюсселято-
ра (2.54), и развития, постоянно сопровождающегося естественны-
ми флуктуациями, согласно схеме (8.28) - (8.29) . Оказалось, что
если выполняются условия возбуждения ряда мод ДС, то флуктуа-
ции значительно ускоряют начальную стадию развития процесса,
выбирая наиболее быстро растущие моды. Когда система ’’выбрала”
конфигурацию, относительная важность флуктуаций уменьшается.
б) Изучался уровень флуктуаций в зависимости от близости к
точке тьюринговой бифуркации. Когда система далека от критиче-
ского состояния (В<Вкр) (см. § 7.2), порядок относительных
флуктуаций около устойчивого однородного состояния соответст-
вует X"112, у'112, т.е. процесс является пуассоновым *). При приб-
лижении к критической точке (В^.Вкр) появляются макроскопи-
ческие флуктуации и процесс становится непуассоновым. Система
*) Этот результат соответствует теории, развитой в [ 145 ].
204
Рис. 8.2. Сосуществование состояния,
близкого к однородному (а), и ДС
(б). Система примерно 1/15 часть
времени проводит в состоянии, близ-
ком к б, а остальное время - в со-
стоянии, близком к а. Процесс счета
составил 70 000 элементарных тактов
(Л = 250. В = 10 000 < Dx = 11,2.
Dy = 5Dx)
Рис. 8.3. а - Установившаяся ДС на
фоне пуассоновских флуктуаций, б -
Пространственный спектр конфигу-
рации а, полученный методом быстро-
го преобразования Фурье (т -
номер моды. В = 15 000 >5кр. Dx =
= 11.2. Z>j. = 5DX)
часть времени проводит в состоянии, близком к однородному,
часть - в состоянии, близком к ДС. При этом время пребывания
ее в состоянии, близком к ДС, растет с увеличением В (рис. 8.2) .
Фактически здесь мы наблюдаем индуцированный собственным
шумом фазовый переход, вернее, ’’попытку” такого перехода.
ДС с вероятностью единица устанавливается лишь при достижении
равенства В = Вкр. Следует ожидать, задавали внешние шумы в
205
Рис. 8.4. Крупномасштабные флук-
туации вблизи критической точки.
Видно ’’сосуществование” первой (а)
и третьей (б) мод, между которыми
происходят перескоки
дополнение к естественным, что полный фазовый переход произой-
дет раньше, т.е. при В <Вкр (см. § 8.5).
Если выполняются условия возбуждения какой-либо моды ДС
и заданы начальные условия, близкие к этой моде, то в вероятност-
ной модели при относительно большом числе молекул в каждом
ящике ее можно наблюдать на фоне пуассоновых флуктуаций. На
рис. 8.3 приведен пример такой (третьей) моды и соответствующий
ей пространственный спектр.
в) Изучались ’’метастабильные” состояния в случае, когда соот-
ношения между параметрами допускают существование несколь-
ких мод ДС (5>Вкр). Как мы знаем (§ 7.3), в детерминирован-
ном случае между такими модами возможны гистерезисные пере-
ходы. В стохастической модели система часть времени может иметь
одну конфигурацию, часть времени - другую (рис. 8.4). На этом
рисунке показано сосуществование разрешенных первой и третьей
мод. Отметим, что именно между этими модами происходит гисте-
резисный переход. Если число разрешенных мод увеличивается,
то поведение системы все более стохастизируется.
8.4. Внешние шумы и диссипативные структуры.
Линейная теория
Рассмотрим наиболее простой случай аддитивных 5-коррелиро-
ванных по пространству и времени флуктуаций. Математической
моделью для случая брюсселятора служит при этом система (2.54),
в правые части которой добавлены случайные функции ^(Г, г) и
$2(f, г). При этом
<е(а,г)> = о,
206
< w, r) tyt + т, г + Дг) > = e28f/8 (Дг)8 (г)
(i,/ = l,2, е<1).
(8.30)
Конечно, случай аддитивного ’’белого” шума является крайним,
однако его рассмотрение интересно само по себе, и с его помощью
можно получить ряд общих закономерностей. Наиболее последо-
вательно подобное рассмотрение проведено в работе [32], которой
в дальнейшем изложении мы и будем придерживаться.
Корреляционный анализ кинетических флуктуаций, возникаю-
щих в системе с аддитивными шумами вблизи однородного стацио-
нарного состояния и при переходе к точкам бифуркации, проводит-
ся в приближении линеаризации. В самих бифуркационных перехо-
дах и очень близко от точек бифуркации линейная теория неприме-
нима. Линеаризованная двухкомпонентная модель вблизи однород-
ных состояний системы (2.54) с аддитивными шумами имеет вид
Эх[ , Э2х'1
—— = Mi 1 х 1 +Mi 2Хг + Di ,
bt br2
.31)
bx’2 ' b2x'2
— =M2iXi +М22Х2 +d2 —5-;
bt br
здесь x i =x', x'2 -y' КоэффициентыMit- брюсселятора,в частности,
равны
Мц=В-\, M12 = -M2i =А2, М22=В.
Так как система (8.31) линейна, то принципиально возможно
вычислить все четыре пространственно-временные корреляционные
функции
Rij(Ar, т) = (x'i(r, f)x'j(r + &r,t + т)>.
Однако методически проще получить сначала единовременные
корреляционные функции
Rn(Ar, Т) = <x'j(r, t) x'j(г + Дг, t) >.
Процедура получения уравнений для этих функций на основе
(8.31) следующая. Умножим соответственно первое и второе урав-
нения на х'1 их2, взятые в точках г + Дг, и усредним по ансамблю
реализаций случайных полей l^-ft, г). Получим следующие урав-
нения:
bR а 2 _ b2Rn
2 (MlkRkf+MfkR(k) + (Dl + Dj) —-В + й е28//6(Дг).
bt к = 1 br
(8.32)
207
Представляют интерес стационарные корреляционные функции,
для которых ЭД jj/bt = 0 при разных соотношениях параметров.
Важнейший случай решений в брюсселяторе, да и любой другой
двухкомпонентной системе возникает для малых значений бифур-
кационного параметра:
a = D1/D2-(l-y/B)2/A2, (8.33)
характеризующего близость системы к точке тьюринговой неустой-
чивости: а = 0 при В = Вкр (см. §7.2),
Rjj(Ar) ~ а-1^2 ехр(—Й а^2Дг) cos(m! Дг + i/?o). (8.34)
Здесь Ui - нижнее волновое число, соответствующее первой разре-
шенной форме или моде ДС (см. рис. 7.3). Параметр а характери-
зует степень когерентности флуктуаций кинетических переменных.
Он задает масштаб области, в которой флуктуации переменных
пространственно скоррелированы:
A = 2/(U1a1'2). (8.35)
Хотя система при а>0 в среднем не упорядочена, в пределах
области Дгкор ~А распределение переменных в пространстве
близко к периодическому. Величина А растет с приближением к
порогу возникновения ДС. Указанный рост А предшествует истин-
ному ’’дальнему” порядку, устанавливающемуся в запороговой
области параметров (а < 0). При а < 0 макроскопическое состоя-
ние системы упорядочено, причем пространственный период ДС
при а= 0 совпадает с периодом осциллирующего сомножителя
в корреляционной функции (8.34). Прямым следствием роста
радиуса корреляции Дгкор ~А является повышение уровня ’’объем-
ных” флуктуаций, так как он определяется интегралом
fRlf(br)dr. (8.36)
В о
Зная пространственную функцию R ц (hr, t), легко получить
уравнение для пространственно-временной функции Rik (Аг, т, г):
ЭЯ,* 2 d2Rlk
= (8.37)
Пт j = 1 dr*
Начальные условия для Rik выражаются через Rik :
Rik^r.r, О|т = о=Д.л(Дг,Т).
Точно так же, как и при решении линейных уравнений для воз-
мущений (см. (3.5)), стационарную корреляционную функцию Яlfe
ищем в виде
Rik(Ar, т) = cik ехр(рт) exp(iKr). (8.38)
208
При этом параметры р и к = 2тг/Х имеют тот же смысл, что и в (3.5),
и связаны между собой дисперсионными соотношениями (3.6).
Величина
’•коР = [р(*)]’1 (8.39)
имеет смысл времени корреляции. При приближении к порогу
устойчивости однородного состояния время корреляции мода Xi,
которая должна возникнуть, растет (ткор ->°°).
8.5. Нелинейные эффекты. Двухъящечная модель.
Распределенные мультипликативные шумы
Результаты рассмотрения в рамках линейного приближения
указывают на существенную роль флуктуационных эффектов
в распределенных системах при приближении к порогу самоорга-
низации. Вместе с тем, как уже отмечалось, само линейное прибли-
жение становится неприемлемым в непосредственной близости
от порога самоорганизации, где, в частности, корреляционные
функции испытывают расходимость, а уровень флуктуаций кинети-
ческих переменных также стремится к бесконечности. Вспомним,
что и в детерминированной теории ДС ответвление от однородного
состояния с нарушением симметрии — существенно нелинейный
эффект. Учет вклада нелинейных членов в общем случае — весьма
сложная задача.
Однако в малой окрестности порога неустойчивости оказывает-
ся возможным провести аналитическое рассмотрение, основанное
на методе разделения движений. Вблизи порога неустойчивости
появляется естественный параметр: обратное отношение времени
релаксации критической моды (RepKp)-1 (в простейшем случае
она единственная и, воспроизводит форму ответвляющейся ДС)
ко всем прочим временам линеаризованной системы. Поэтому
на временах порядка времени релаксации критической моды
заметно эволюционирует лишь эта ’’медленная” степень свободы.
Таким образом, задача сводится к исследованию соответствующе-
го стохастического, уравнения движения вместо системы таких
уравнений в исходной постановке. Данный подход опирается на
идею Ландау выделения параметра порядка в теории фазовых
переходов второго рода. Для исследования самоорганизации в
тьюринговой системе он был реализован в [32] на основе ее двухъ-
ящечной модели. Заметим, что двухъящечная модель, как мы пока-
зали в § 7.1, и в детерминированном случае также позволяет
получить ряд принципиальных результатов в теории ДС.
В качестве ’’медленной” моды возьмем антисимметричную
координату (см. § 3.6)
Д(0 = а(Х1 -х2) + Ь(У1 -у2)- (8.40)
209
На временах т ~ (Re Рд)-1 в отсутствие шумов поведение этой
координаты определяется уравнением
dA
— = рдД-*2Д3. (8.41)
dt
Пусть параметры Л и В в модели брюсселятора флуктуируют около
своих средних значений и эти флуктуации малы и подчиняются
нормальному закону распределения
Л=<Л) + еат В = <5) + ейе(0
(еа4<Л),
Тогда уравнение (8.41) дополняется флуктуационными членами
= рд Д - к2 v3 + е2 Г(0 + е2ь ?ft(r) Д. (8.43)
dt
Соответствуюшее уравнение Колмогорова — Фоккера - Планка
Рис. 8.5. Вид стационарного распределения вероятности w (Д) для антисим-
метричной моды при трех значениях бифуркационного параметра:Рс<-е^(д),
-el<Pc<0 (в)
210
для плотности вероятности w(t, Д) будет
Эи> Э , ,
— =- — [(рдД-*2Д3-4Д)Ч +
bt эд
э2
+ 77Т [(еа+4 Д2)Ч- (8.44)
ЭД2
При dw/Эт^О из (8.44) получается стационарное распределение
вероятностей, качественный вид которого иллюстрируется для
различных значений параметров рис. 8.5. В вероятностной трактов-
ке макроскопический эффект расслоения проявляется в виде
расщепления максимума н>ст(Д) в точке Д = 0 на два симметричных
в точках Д± = ± | (рд - e|)/fr21 ^2. Это происходит при значении
Рд = el, тогда как при детерминистическом описании расслоение
имеет место при рд = 0. Однако еще до порога неустойчивости в
области изменения параметров —е| <рд < 0 система ’’знает” о
последующем раздвоении, проводя часть времени в одном из двух
расслоенных состояний:
Д±« (Дс+е|)!/2д. (8.45)
Отметим, что величина еа, определяющая интенсивность аддитив-
ных флуктуаций, сказывается лишь на ширине пика стационарного
распределения н,ст(Д) и не влияет на значения порогов расслоения.
То, что в области -еь<рд<0 распределение ууст(Д) остается
одномодальным, есть следствие частных перескоков между двумя
близкими состояниями. Напомним, что и в случае естественных
распределенных мультипликативных шумов (§ 8.4) при условии
выполнения возбуждения двух мод наблюдаются двухмодельные
распределения, соответствующие рис. 8.5. Однако новых состояний
или максимумов распределения не возникает.
Распространение АВ и фазовых переходов в средах с распреде-
ленными мультипликативными шумами рассматривалось Михайло-
вым и Упоровым (см. [142, 153]). Простейшей моделью такого
процесса является уравнение вида
Эх Э2х
— = - ах - fix3 + D-^ + %(г, f) х (а>0, Р>0). (8.46)
Здесь £(г, Г) — внешний распределенный параметрический шум.
При этом (£(г, Г) > = 0, а
, , / I г - г’ | | t - г' | \
< $(г, 0 $ (г , t)) = S expl ---------- I.
\ г0 т /
Основным результатом [142] является следующий: шумовая
накачка делает систему активной — в ней могут распространяться
20
БФ при условии, что интенсивность 5 превышает некоторое порого-
вое значение. Уравнение для ’’усредненного” БФ оказывается
аналогичным уравнению Гинзбурга — Ландау, возникающему в
теории фазовых переходов второго рода [130]. Более подробно
с проблемами мультипликативных шумов можно ознакомиться
по книгам [153, 261].
Наконец, упомянем работу [Дба], в которой рассматриваются
три типа пространственно-неоднородных режима в активных си-
стемах с диффузией: 1) слабонеоднородные в пространстве режи-
мы с сильной стохастичностыо во времени, 2) автоволны переклю-
чения ’’порядок — беспорядок”, 3) стационарные во времени хао-
тические ДС. Моделирование таких систем при наличии аддитив-
ных или мультипликативных шумов даст ответ - возможно ли
существование этих ’’странных” режимов в реальных системах.
ГЛАВА 9
АВТОВОЛНОВЫЕ МЕХАНИЗМЫ ТРАНСПОРТА
В ЖИВЫХ КАНАЛАХ
В этой главе мы рассмотрим один класс АВ-механизмов в био-
логии, которые обеспечивают перемещение жидкой среды в трубках
и вызываются полностью или частично изменениями формы трубки
(канала). Такие течения называются перистальтическими. Их наз-
начение состоит в транспорте и (или) перемешивании жидкости.
В первом случае изменения формы трубки, как правило, носят
характер бегущей волны, а во втором имеют место более сложные
волновые процессы. В технике примерами перистальтических сис-
тем могут служить разнообразные роликовые насосы в аппаратах
искусственного кровообращения и прецизионных дозаторах.
Биологическими примерами являются органы желудочно-кишеч-
ного тракта (пищевод, желудок, тонкий и толстый кишечник),
мочеточник, миометрий, некоторые кровеносные сосуды и другие
гладкомышечные органы, а также транспортные канальцы расте-
ний и даже одноклеточных организмов.
Определяющим в организации перистальтических движений
является поведение стенки трубки. В достаточно общем случае
его можно описать уравнением [158,159]
b\S,P,Pe,y) = 0, (9.1)
где S — площадь сечения, Р — давление в потоке, у — мера актив-
ности стенки. Частные случаи (9.1): 1 — волна внешней нагрузки:
Ре =Ре 2 - параметрическая волна: Ре =const, y = y(z,t);
3 — генерация автоволны: Ре = const. В двух первых случаях АВП
могут играть роль факторов, организующих перистальтические
течения, а в третьем они возникают по механизму локальной об-
ратной связи между гидродинамическим давлением и сократитель-
ным аппаратом стенки. В биологии встречаются оба типа АВ-яв-
лений в перистальтических движениях. Ниже мы обсудим их на
примерах трех биологических объектов.
213
9.1. Автоволны в органах желудочно-кишечного тракта
Все перистальтируюшие органы имеют схожее строение и обла-
дают многими близкими свойствами. Их стенки включают слои,
состоящие из пучков гладкомышечных клеток. Имеются два слоя:
продольный и циркулярный, в которых клетки ориентированы
соответственно вдоль и по периметру канала. Эти гладкомышечные
клетки обладают двумя видами спонтанной электрической актив-
ности: относительно медленным изменением потенциала (медлен-
ные волны — МВ с амплитудой до 10 мВ) и коротким импульсом
(потенциалы действия - ПД с амплитудой 70 мВ) [39]. Клетки
могут сокращаться только при наличии ПД, а МВ не связаны с сок-
ращениями непосредственно.
В тканях распространяются как импульсы ПД, так и МВ;причем
корреляционные длины при распространении ПД относительно
малы - порядка 5-10 мм, а МВ проходят расстояния порядка
нескольких длин волн (для человека это 10—40 см). ПД возни-
кают только на гребнях МВ. Учитывая изложенное выше, можно
говорить, что интенсивность быстрого компонента электрической
активности определяет силу сокращений, а МВ является синхро-
низирующим и координирующим сокращения и перистальтичес-
кие течения фактором [73].
В тонкой кишке имеется плавный градиент собственных частот
МВ: самые высокочастотные генераторы расположены в верхнем
отделе [39]. Совокупность этих опытных данных позволяет сфор-
мулировать базовую модель в виде цепочки связанных генерато-
ров с эквидистантными собственными частотами [73], рассмот-
ренную в гл. 6.
Исследование этой модели показало, что в таких цепочках об-
разуются частотные кластеры, а синхронизация элементов трубки
происходит посредством распространения бегущих волн. Модель
правильно описывает основные, наблюдаемые в опытах режимы
[39, 261]. Перистальтические течения происходят по первому
типу в (9.1) - волны внешней нагрузки. В простейшем случае
для их расчета можно использовать пуазейлевское приближение
и задавать нагрузки в виде (Р ~PS) = const • (S — So), где Pe —
интенсивности MB.
Расчеты показывают хорошее качественное совпадение с опыт-
ными данными, описывая все основные наблюдаемые режимы те-
чений в тонком кишечнике. Развитие модели должно быть связано
с учетом тонких реологических свойств трубки, а также с учетом
влияния ее механического состояния на условия генерации и про-
ведения возбуждений.
214
9-2. Волны в малых кровеносных сосудах с
мышечной стенкой
Одной из возможных областей использования представлений
об автоволнах являются исследования процессов в системе микро-
циркуляции. В частности, известно, что активная деятельность со-
судистой мускулатуры управляется не только внешними воздейст-
виями, но и самим напряженным состоянием стенки [188, 247].
Для отдельного сосуда имеются экспериментальные данные, указы-
вающие на возможность существования падающего участка в ста-
тической характеристике давления [112, 232] и волновых сокра-
щений малых сосудов [106]. Теоретическое рассмотрение поведе-
ния сосудов с мышечной стенкой проводилось в работах [112, 158,
164, 172]. Остановимся здесь только на результатах, связанных
с активными волновыми движениями. Простейшая модель для
мышечной стенки сосуда круглого сечения с учетом движения
жидкости в сосуде изучалась Регирером и его сотрудниками [158,
164,172] и имеет вид
ЭЛ ЭЛ
—-0[Л-Р3(Р)] =* —, (9.2)
Ot ot
ЭЛ 1 Э / л ЭЛ \
Л — =----------Л4 —,
Эг 16д 9z \ dz /
(9.3)
где Р - трансмуральное давление, Л - радиус сосуда, z - коорди-
ната вдоль оси сосуда, /3 и к — некоторые положительные фиксиро-
ванные вязкоупругие модули, д - вязкость жидкости, Р3 (Р) -
полином третьей степени, с помощью которого аппроксимируется
статическая характеристика давления — радиус (рис. 9.1а) [112,
172]. Уравнение (9.2) феноменологически описывает реологичес-
кие свойства гладкомышечной стенки S-сосуда. Уравнение непре-
рывности (9.3) получено в предположении локальной "пуазейливос-
Рнс. 9.1. а — Статическая характеристика ’’давление - радиус”, б - Волны
деформации сосуда. Сплошная линия - БИ давления, штриховая линия - из-
менение радиуса; V, и Vt - устойчивые скорости распространения фронтов,
К3 - скорость неустойчивого возмущения (И, > Й2 > И3)
215
ти” потока в трубке переменного сечения. Отметим, что по клас-
сификации ”базовых” моделей система (9.2)- (9.3) является мо-
делью распространения уединенного фронта возбуждения.
Для качественного понимания возможных процессов в такой
системе важным является изучение стационарных решений. Рас-
смотрим, следуя работе [112], упрошенный случай — малые откло-
нения переменных Р —Р =Р р' , R — R =Rx от некоторых выб-
ранных стационарных значений (Р ,R ). Тогда в безразмерных
переменных х', z' =z/z\ t' =tlt получаем следующие уравнения:
d
-V —(тр'-пх')-сх'-р'(1 -p'/miXl +р'1т3), (9.4)
dx' d2p'
V-----+vi —— =0,
где $=z' — Kr', m= (a t (3) -1, n = kP l(ot($R t ), c=R /(aP ), v i =
=RP t /(16дГ2). Здесь mi wm2 — безразмерные корни полинома
P3 (p), a - коэффициент в линейном члене при разложении Р3 (Р)
около точки Р.
Существуют только три физически реализуемых стационарных
решения системы (9.4) — (9.5) для неограниченной области (—°° <
< S < +°°) • Два из них имеют похожий вид. Изменения давления
в них представлены уединенной волной — фронтом возбуждения,
а изменения радиуса связаны с волной локального сжатия либо
с волной расширения сосуда (рис. 9.16) :
р;,2«)=
_ mi -т3
т3 + mt
2
th
(t-to)(m3 + m>)
(9.5)
(9.6)
<,«) =
fl
-± 2K,.2
(mi + m3)2
(mi +m3)($ -$o)
ch 2---- -------- ----,
2x/2«f i Wj/Пз
а скорость распространения этих волн для каждого знака
+ в (9.6) - (9.7)) имеет два значения:
_ nvi Уо
,2 ~ + ~
2т
где Ко = + (тг - m3)/V2«f i mY т3. При этом, как следует из зако-
на сохранения (9.3) или (9.5), скорость распространения волны
2-\/ 1nvxmim3
(9-7)
(- или
(9.8)
216
совпадает со скоростью движения жидкости в сосуде (вызванной
волной перепада давления) в случае локального увеличения радиу-
са сосуда. При локальном уменьшении радиуса сосуда и скорость
волны, и скорость жидкости Имеют противоположные направле-
ния. Третье стационарное решение находится из уравнения [164]
( dp3 \2 1 рз
(——) =------------- f (г - + т3) dr, (9.9)
\ / nriMims
, fi dp3
x3 ~-----------
V3 d$
(9.Ю)
где mt = mi, если I 1 < | m3|, и mt = m3, если I лц I > I m3|, и
представляет собой импульсное возмущение. Скорость такой
волны
К3=±
т
(9.П)
Аналитического исследования устойчивости стационарных реше-
ний системы (9.2) — (9.3) не проводилось. Однако на основании
численных расчетов можно сделать вывод, что первые два решения
устойчивы, а третье решение неустойчиво к малым возмущениям.
Такой вывод согласуется с результатами по исследованию устой-
чивости обычных уединенных волн возбуждения (волн перепадно-
го типа — см. § 4.1). Следовательно, третье стационарное решение
Рз(О и хз(^) представляет собой определенного рода границу,
разделяющую начальные возмущения, приводящие к формирова-
нию стационарных волн р, 2($) их, 2(f), от начальных возмуще-
ний, исчезающих с течением времени. Схематически такое соотно-
шение между волнами в системе (9.2)-(9.3) показано на
рис. 9.16.
Таким образом, качественное отличие волн в рассматриваемой
модели от обычных уединенных волн связано с возможностью су-
ществования двух устойчивых волн возбуждения, распространяю-
щихся с разными скоростями и в противоположные стороны.
Комбинируя этими двумя устойчивыми волновыми структурами,
можно рассмотреть некоторые варианты динамического поведения
системы. Пусть, например, в начальный момент времени созда-
но повышенное давление на участке z,, z2. Тогда дальнейшее
движение границ этого участка зависит от того, имеются ли локаль-
ные сжатия или расширения сосуда на границах zt и z2. Если на
границах имеется расширение сосуда, то размер участка будет
увеличиваться. Если на границах — сжатие сосуда, область повы-
шенного давления через некоторое время исчезнет. В случае расши-
рения сосуда на одной границе и сжатия его на другой участок по-
2П
вишенного давления будет распространяться в виде импульсного
возмущения. При этом длина импульса будет увеличиваться. Крат-
ко отметим возможное участие описанных автоволновых явлений
в процессах регуляции кровотока. Пока, по-видимому, о роли та-
ких процессов здесь можно судить лишь предположительно, так
как слишком мало необходимых экспериментальных данных.
Да и теоретическое рассмотрение еще далеко не полное. Можно
предположить, например, что с автоволнами давления связан ме-
ханизм стабилизации расхода крови через отдельные артериолы
в заданном диапазоне давлений на выходе этих артериол.
Отметим также, что автоволновые представления могут оказать-
ся полезными при исследовании течения крови по сети мелких со-
судов. Так, были построены качественные локальные характеристи-
ки ’’расход — давление” для сети мелких кровеносных сосудов
[10]. Было показано, что эти зависимости могут иметь падающий
участок; кроме того, связь между участками сети имеет диффу-
зионный характер. Следовательно, пространственные структуры
неоднородного кровезаполнения тканей, вполне возможно, могут
быть связаны с активными волновыми процессами. Для некоторых
тканей известны примеры такого неоднородного заполнения.
Например, пространственная мозаика кровотока была обнаружена
в коре головного мозга в опытах на кошках [143]. Микроинфарк-
ты сердечной мышцы свидетельствуют о неоднородном распределе-
нии кровотока в миокарде. Весьма наглядным примером является
неоднородное кровоснабжение кожных покровов.
9.3. Автоволновые явления в плазмодии миксомицета
Слизевик Physarum Polycephalum, или многоядерный плазмодий
миксомицета, является одним из распространенных объектов ис-
следования внутриклеточной подвижности. Весь организм может
занимать площадь до 1 м2. На определенной стадии своего разви-
тия Physarum образует систему тяжей с фронтальной областью,
в направлении которой он может мигрировать (рис. 9.2). Во фрон-
тальной области тяжи сливаются в пленку, пронизанную
сетью каналов. Толщина тяжей может достигать 0,5 мм. Благодаря
сокращениям актиновых фибрилл, локализованных в стенках,
происходят периодические изменения радиуса тяжа, которые в
свою очередь приводят к колебательным (пушпульным) течениям
протоплазмы внутри тяжей и фронтальной пленки. На рис. 9.3
показаны типичные осциллограммы изменения радиуса тяжа и
средней скорости течения протоплазмы в одном и том же сечении,
полученные на доплеровском спектрометре [76]. Характерные
изменения радиуса тяжа составляют 5 — 10%, максимальные зна-
218
Рис. 9.2. Фотографии фронталь-
ной зоны плазмодия Physarum в
четыре последовательные момен-
та времени. Темные зоны - вол-
на утолщения пленки [24]
чения скорости — 1 — 2 мм/с,
период колебаний —1—2 мин.
Во фронтальную область
на каждом периоде перено-
сится больше вещества, чем
назад, благодаря чему идет
миграция фронтальной зоны
на 1 - 3 см в час. Можно
выделить следующие типы
АВ-движений в плазмодии:
1. Волнообразное распрост-
ранение утолщений во фрон-
тальной пленке со скоростя-
ми от 5 до 30 мкм/с (см.
рис. 9.2). Иногда можно на-
блюдать циркуляцию таких
волн. 2. Квазистохастичес-
кие колебания толщины
пленки. 3. Почти синфазные
радиальные пульсации сети
тяжей небольших размеров.
4. Распространение перисталь-
тических сокращений по
длинным тяжам.
Если вырезать фрагмент
тяжа длиной 0,5—3,0 см и
поместить на питательную
среду, то через 10—15 мин в
нем восстанавливаются пуш-
пульные движения прото-
плазмы. Отрезок тяжа мож-
но описать с помощью сле-
дующей ’’словесной” моде-
ли. Будем считать оболочку
тяжа цилиндрической труб-
кой с вязкоупругими стен-
ками. В стенках циркулярно
расположены сократитель-
ные элементы - фибриллы,
219
Рис. 9.3. Осциллограммы изменения радиуса тяжа (кривая а) плазмодия и
средней скорости течения протоплазмы (кривая б)
Рнс. 9.4. Схема продольного сечения сокращающегося тяжа
состоящие из жгутов актиновых нитей. Трубку заполняет вязкая
протоплазма, в которой находятся органеллы, частички пищи,
конгломераты актиновых нитей, молекулы миозина в виде неболь-
ших комплексов, ионы кальция (Са+2), молекулы аденозинтри-
фосфорной кислоты (АТФ) и ряд других веществ. В отличие
от.тканей поперечнополосатых мышц, где актиновые и миозино-
вые нити образуют хорошо организованные сократительные
комплексы, таковых в плазмодии не обнаружено. Структура его
сократительного аппарата сходна с таковой у гладкомышечных
клеток (§ 9.1 и 9.2). Актиновые фибриллы образуют стохасти-
ческую сеть в матриксе стенок, тут же вкраплены олигомеры мио-
зина. Простейший комплекс миозин-димер имеет две ’’головки”.
220
Эти головки могут взаимодействовать с активными центрами,
расположенными вдоль актиновых нитей. Акт взаимодействия
состоит в повороте молекулы миозина. Если другой конец диме-
ра-миозина закреплен в матриксе или же за активный центр парал-
лельной фибриллы, то при повороте димера возникает сила, застав-
ляющая фибриллы проскальзывать относительно друг друга. Если
в данном сечении тяжа такие движения происходят в среднем
синхронно, например за счет повышения ’’местной” концентрации
Са+2, то это приводит к уменьшению радиуса тяжа *). Протоплазма
выдавливается из сокращающейся области и перетекает в соседние
области, растягивая соответствующие участки тяжа. Эти растяже-
ния могут способствовать увеличению местной концентрации Са*2.
Таким образом, создаются условия для нового активного сокраще-
ния, но уже в сечениях, соседних к первоначально сократившемуся.
Заметим, что актиновые фибриллы могут скользить относительно
друг друга, если имеется достаточное количество молекул АТФ.
Данное словесное описание можно выразить в виде математичес-
кой модели. Окончательные модели, вернее, модели такого же со-
вершенства, как для поперечнополосатых мышц [70], для плазмо-
дия еще не построены, однако уже существуют достаточно содер-
жательные полуфеноменологические модели. Сформулируем
такую модель следуя работам [182, 204,206, 235, 265].
В первом приближении протоплазму можно считать вязкой нью-
тоновой жидкостью. Обозначим средний радиус тяжа через Л,
кинематическую вязкость протоплазмы — v, малые отклонения
среднего радиуса -х. Так как число Рейнольдса Re = VzR/v ~10-3,
то движение протоплазмы можно описать уравнением
ЭК2 ЪР Г 1 9 / ЭК2
р-------------+ р-------1 г-----
dt dz L г dr \ dr
(9.12)
Здесь р — плотность, а д = vp — вязкость Протоплазмы, dP/dz —
продольный градиент давления, возникающий из-за изменения
радиуса, Vz — продольная составляющая скорости (рис. 9.4). По-
скольку деформации стенок малы, то можно считать, что
Мг=*=0’ <9ЛЗ)
а форма профиля продольной скорости в канале — параболическая:
Vz(z, г, г) = K0(z, Т) [1 - (г/Л)2 ] • (9-14)
Составляющие Vz и Vr связаны между собой следующим уравне-
*) Отметим здесь интересный АВ-подход к взаимодействию актина и
миозина, развиваемый Давыдовым [65].
221
нием непрерывности:
bVz 1 9
-^-+—— (гИг) = °.
0Z г or
(9.15)
Введем в рассмотрение среднюю скорость в сечении канала:
2 R V0(z, t)
V(z, t) = frVz(r, z, t)dr =---(9.16)
a o 2
Тогда уравнение (9.12) можно проинтегрировать по площади сече-
ния и представить в виде
bV ЬР 8д _
р-----=---------+ -ГГТ V.
bt bz R2
(9.17)
Основная проблема, которую необходимо решить, — это найти
выражение для давления Р в зависимости от параметров оболочки
и свойств сократительных фибрилл. Величину Р можно разбить на
два слагаемых: пассивное давление Рп, определяемое деформацией
оболочки, и активное давление Ра, зависящее от степени взаимо-
действия актиновых фибрилл и миозина:
Р=РП+Р».
(9.18)
Пусть относительное удлинение элемента тяжа, расположенного
по окружности, Д1/1 -x/R. Тогда пассивная часть давления, созда-
ваемая за счет изменения радиуса, будет
Eh Kh bx / Эх
Рп х + ----+ £х I х, —
R2 R2 bt х\ bt
(9.19)
Здесь Л - толщина стенки, Е и к - ее модуль Юнга и коэффициент
вязкости, £z — линейный дифференциальный оператор, зависящий
от модуля Юнга Б1' ~Б и коэффициента к’ ~к в направлении оси z.
При малых радиально-симметричных деформациях
/ 9х\
£z( х> т ) -
\ bt /
ЕЧ b4R к'1 b5x b2x 1
»'—_—- + — ----------— + т— -----=-- (9.20)
2nR 9z4 2irR bz*bt bz2 2ttR
Здесь / — момент инерции сечения стенки трубки, / = irRh3 /6, Т —
продольное натяжение тяжа, которое мало и приближенно может
быть описано формулой Г = E'lTtRhe, где е — относительная по-
стоянная продольная деформация тяжа (е <0,1). Пусть вдоль тяжа
длиной L установилась стоячая волна
(я \
— nz ) • (9.21)
Б J
222
При этом на концах тяжа возникают пучности и почти всегда вы-
полняются сильные неравенства
Х„=£/и>К>й. (9.22)
Тогда легко видеть, что величиной £z можно пренебречь по сравне-
нию с первыми членами выражения (9.19).
Запишем условие на стенке трубки для радиальной составляю-
щей скорости, которое с учетом (9.15) и (9.16) примет вид
bx \ R bV, R bV
— = I _„ = —— fг dr =----------------
bt 'r R R о bz 2 bz
Продифференцировав уравнение (9.17) no z и воспользовавшись
выражениями (9.19) и (9.23), получим уравнение, описывающее
АВП сокращений тяжа:
Э2х 8д Ьх
... . . . —. ss
bt2 pR2 bt
Eh b2x Kh b3x R b2RA
(9.23)
(9-24)
2pR bz2 2pR bz2bt 2p bz2
Остается конкретизировать вид зависимости РА(х, bx/bt). Это
мы сделаем из следующих феноменологических соображений:
1. Давление должно задаваться функцией, обеспечивающей внесе-
ние в систему отрицательного затухания. 2. Активная сила действу-
ет лишь на сжатие. 3. РА должна быть ограниченной. 4. Активная
сила включается с некоторым малым по сравнению с периодом ав-
токолебаний запаздыванием т. Эта задержка вызывается конеч-
ностью характерного времени диффузии ионов Са +2, поступающих
из ’’хранилищ” к фибриллам, перестройкой и поляризацией акти-
новых нитей и другими причинами
бованиям удовлетворяет функция
/ bx X
РА (*, —) =
л\ bt /
bx(t — т) ,
а-------------[1 - 0x2(t - т)]
bt
[12, Д8]. Перечисленным тре-
при
при
(9.25)
О
bx
— <0,
bt
bx
— >0.
bt
Альтернативной формой задания РА служит уравнение
ЬРЛ 1
Ьх
bt
(9.25 а)
bt
При малых временах (т < Г) это уравнение эквивалентно введе-
223
нию задержки [12, 206]. Заметим также следующее. Внутри тяжа
всегда существует постоянное давление, немного превышающее
атмосферное, благодаря чему тяж поддерживает свою форму. По-
/ д* \
этому функция /I х, — ) в принципе может быть задана не так,
\, dt /
/ <bc\ dx
как в (9.25), а в виде fix, — = а — [1 - 0х2]. Это значит, что
\ dt / dt
отсчет смещения производится не от нуля, а от некоторого уровня,
определяемого постоянным избыточным давлением. Можно по-
казать также, что уравнения (9.24)—(9.25а) эквивалентны системе
уравнений для АВП в кровеносных сосудах при следующих пред-
положениях: нужно считал изменение радиуса R в системе (9.2)—
(9.3) малым (R =Л(1 + х'), 1) и не учитывать в (9.24) инер-
ционного члена. Введем время ti =t — T\ тогда уравнение (9.24)
запишется в виде
Э2х(Г] + т, z) 1 Г 8д dx(ti+r,z) Kh d3x(ti+r, z) '
dr? R dti 2 dz2dti
_ Eh Э2*(Г1 + T’ E Э2Рл(Г,г)
2pR dz2 2p dz2
Это уравнение в принципе можно решать при различных условиях
на торцах тяжа, например учитывающих его медленную миграцию.
Ниже мы остановимся на простейшем случае решения этого урав-
нения, описывающего так называемую двухкамерную модель
тяжа. Короткий отрезок тяжа длиной L < 1 см ведет себя как
система двух поочередно сокращающихся камер, соединенных
между собой трубкой. Такой форме автоколебаний в распределен-
ной системе соответствует решение (9.21) при п = 2 [12, 206].
Если т мало по сравнению с периодом искомых автоколебаний,
то в уравнении (9.26) члены с аргументами Л +т можно разло-
жить в ряд по т и ограничиться двумя первыми членами разложе-
ния. Подставим в (9.26) решение в виде x(ti ,z) = х0 i(?i )cos(ttz/£) и
воспользуемся галеркинской процедурой. Для этого умножим урав-
нение (9.26) на cos(nz/L) и проинтегрируем по z от 0 до L. Тогда
мы получим приближенную запись уравнения (9.26):
32Xoi <bcoi <Ьс01 /1 . \
М------- + Н--------А------I 1------) + ^х01 =0, (9.27)
dt2 d^ dti \ 2 /
где М = Tich/R, Н = Kh/R, A = aR/4, К = Eh/R. Здесь мы пренебрег-
224
ли малыми членами
Э2хг
d3Xoi
8рт \
Эг? V ~р&/
/ я \2 Ehr \
ЭГ1 \ рЛ2 \ L/ 2pR /
при учете конкретных значений параметров: т< Г; L = 1 см; R =
= 0,1 см; Л = 10-2 см; д = 10 Пз; к =? 10е Пз; Е = 10s Дн/см2. Су-
щественно, что при этом Выполняется неравенство (9.26), а вяз-
кость стенок на много порядков превосходит вязкость протоплаз-
мы (к > д). Запишем теперь (9.27) в безразмерной форме:
d2y dy ,
-4 + е-~ (1—у2) +у = 0. (9.28)
dt dt __ __________________
Здесь безразмерное время t' = t£l, у = V0*Xoi, е = А - H/xjKM.
Величина S2 = у/К/М « у/ЕЦтк), а /3* = Р/2(А - Я).
Пусть теперь амплитуда активного давления а, а следовательно,
и А, такова, что А>Яие^З — 5. Этот случай соответствует релак-
сационным колебаниям, форма которых приближается к наблюдае-
мым в эксперименте. При этом безразмерный период автоколеба-
ний равен Т' = 1,6е, а амплитуды безразмерных отклонений радиу-
~е. Соответствующие размерные
max
— Эх
величины равны хтах = 2у0 , —
dt
bt\
Эх0I / 8д
Эу
са и скорости утах * 2, —
2е
-— S2. Из опытов из-
_ max vP
вестно, что xmax ~ ОДЛ ~ 10~2см. Посмотрим, можно ли при этих
величинах хтах подобрать такие разумные значения т < Т, чтобы
период автоколебаний был близок к наблюдаемому Т « 10 с, а
скорость течения протоплазмы V & 1 мм/с. Согласно (9.23) V =
-
dt
Т* 10 с
В квазигармоническом режиме (при е < 1) легко вычисляется
значение периода автоколебаний в случае, когда в тяже устанавли-
вается стоячая волна (9.21). При этом период и-го тона равен
max
2L
—— . В итоге получаем, что, например, при т = 0,1 с,
Rit
5 • 10-2см/с.
2я
т"'~ап
2 Kh
2pR
тш\2 Eh
L ) 2pR
(9.29)
225
Для реальных значений параметров период мало зависит от и и
размеров тяжа и оценивается по формуле Тп * 2ях/кт/£’. Это об-
стоятельство, а также наличие зон остановок в длинных тяжах,
соответствующих и-му тону движений протоплазмы, подтверждает-
ся экспериментально [80].
В работе [Д8] исследована модель с учетом взаимодействия
актомиозиновых комплексов с ионами кальция. При этом вместо
уравнения (9.25а) записаны два уравнения: уравнение для PA(z, t),
отражающее кинетику изменения работающих миозиновых мости-
ков, и кинетическое уравнение для концентрации с свободных ионов
кальция в данном сечении z:
= kiF(c) \Р0 - РА\ -кгРд,
dt
а (9-30)
ос
—= к3х - кцс.
dt
Здесь F (с) — пороговая функция, Ро — максимально возможное
давление, развиваемое работающими актомиозиновыми комплек-
сами, ki, к2, к3, кь — кинетические коэффициенты. Предполагает-
ся, что концентрация Са+2 увеличивается при наличии положитель-
ных деформаций x(z, t). Анализ системы (9,24—9,30) приводит к
решениям, хорошо соответствующим экспериментальным данным.
При этом частота автоколебаний по-прежнему описывается форму-
лой типа (9.29), а задержка т выражается через параметры уравне-
ний (9.30).
ЗАКЛЮЧЕНИЕ
В заключение приведем таблицу, в которой указаны основные
достаточные условия существования разных типов АВП. В таблице
использованы следующие обозначения: 1) точечная система типа
Т — триггерная, А — автоколебательная, ПА — потенциально авто-
колебательная; 2) коэффициенты к1,к1,а,а определяются па-
раметрами точечной системы; 3) тх и ту — характерные времена
переменных х и у; 4) х - автокаталитическая переменная, a Dx -
ее коэффициент диффузии.
Нам остается сделать следующие заключительные замечания:
а) Возникает вопрос: обладают ли рассматриваемые базовые
модели достаточной общностью, т.е. можно ли на основе одной мо-
дели описать и изучить целый круг наблюдаемых явлений? На этот
вопрос следует ответить положительно. Например, базовые моде-
ли распределенных реакций Белоусова - Жаботинского качествен-
но описывают все режимы, наблюдаемые на опыте. При этом
переключение модели с одного режима на другой (с ВЦ на ДС, с
СА на ВЦ и т.д.) происходит с помощью изменения коэффициен-
тов в соответствующих уравнениях. Такая ’’гибкость” базовых мо-
делей может служить критерием их полноты. Более того, имеется
надежда построить на их основе качественную теорию обсуждав-
шихся в книге АВП.
б) Помимо создания обшей качественной теории АВП, в различ-
ных областях естествознания выдвигаются все новые практичес-
кие задачи, связанные с изучением распределенных активных ки-
нетических систем. Их формулировка на математическом языке,
идентификация коэффициентов моделей согласно эксперименталь-
ным данным, поиск наиболее простого описания явлений, которое
вместе с тем хорошо предсказывает поведение системы во времени
и пространстве, - вот та область, в которой могут попробовать
свои силы исследователи различных специальностей.
227
ЗАКЛЮЧИТЕЛЬНАЯ ТАБЛИЦА
Сводные характеристики рассмотренных антоволноных процессов
Тип АВП Минимальное число пере- менных мо- делей Минимальная размерность пространства Тип точечной системы Коэффициен- ты диффузии Скорость
1. Распространение волн
1.1. Одиночный бегущий фронт (БФ) 1 1 т V “ x/TxDx
1.2. БФ с пульсирующей скоростью 2 1 т
1.3. БФ в режимах спинового горения 2 2 т
1.4. Бегущие импульсы (БИ) 2 1 ПА, А, т Ох ту Уутх V^sJtxDx
2. Автономные источники волн 2.1. Взаимный перезапуск участков
активной среды - ”Эхо” 2 1 ПА Dy = 0
2.2. Деление остановившегося фронта 2 1 ПА, А, Т Dy = 0
2.3. Стабилизация стартовой области TyDx > TxDy
БИ - автопейсмекер или ведущий a) Dz < Dx
центр (ВЦ) 3 1 ПА, А, Т б) Dz > Dx
2.4. Спиральные волны - ревербераторы 2 2 ПА, А TyDx > rxDy
3. Автоколебания 3.1. Синхронные в пространстве Dx-Dy > Ki
автоколебания (СА) 2 1 А
'tDx-Dy\> к2
3.2. Расфазированные автоколебания 2 1 А Dy = 0
3.3. Стоячие волны 3 1 ПА, А Dx ~Dy < Dz
3.4. Перемещающиеся ВЦ 3 1 ПА, А, Т см. п. 2,3, Dz ~DX
3.5. Квазнстохастнческне автоколебания 2 1 А Dy = 0
4. Стационарные диссипативные
структуры (ДС) ПА, А
4.1. Квазнгармоннческне ДС 2 1 TyDx<ZrxDy И-0
4.2. Контрастные ДС 2 1 ПА, А,Т ryDx XDу
4.3. Метастабильные ДС 1 1 Т D ~ax°
5. Пульсирующие ДС 2 1 А см. nn.4.1, 4.2 K=0
СПИСОК ЛИТЕРАТУРЫ
1. Автоволновые процессы в системах с диффузией/Под ред. М.Т. Грехо-
вой. - Горький . ИПФ АН СССР, 1981.
2-Агладзе КМ. Исследование вращающихся спиральных волн в химичес-
кой активной среде. - Препрннт/ИБФ АН СССР. - Пущино, 1983.
3. Алду шин А.П., Каспарян С.Г. Теплодиффузнонная неустойчивость
стационарной волны горения. - Препринт/ОИХФ АН СССР. - Черного-
ловка. 1978.
4. Алду шин А.П., Каспарян С.Г., Шкадинский К.Г.ЦДАН СССР. - 1979.-
Т. 247, №5. -С. 1112-1115.
5. Алду шин А.П. Мартемьянова Т.М., Мержанов А.Г. и др.// Физика горе-
ния и взрыва. - 1973. - № 5. - С. 613-626.
6. Алексеев В.В., Костин U.K. Устойчивость простейших биогеоценозов к
случайным внешним воздействиям//Бнологическне системы в земледе-
лии и лесоводстве. - М.: Наука, 1974. - С. 105-112.
7. Альтов В.А., Зенкевич В.Б., Кремлев М.Г., Сичев В.В. Стабилизация маг-
нитных сверхпроводящих систем. - М.: Энергия, 1975.
8. Андронов А.А., Витт А.А., Хайкин С.Э. Теория колебания. - М.: Физ-
матгиз. 1959.
9. Анищенко В.С. Стохастические колебания в радиофизических системах.
Физико-математические основы описания динамической стохастичности.
Часть I, И. - Саратов: Изд-во Сарат. ун-та, 1985.
10. Антонец В.А., Антонец М.А., Кудряшов А.В. О возможности автоволно-
вых явлений в сетях мелких кровеносных сосудов// [1 ] • - С- 2"28-232.
И.Арансон И.С., Гапонов-Грехов А.В., Рабинович М.И.ЦЖЭТФ. - 1985. -
Т. 89,вып. 1,№7. -С. 92-105.
12. Архангельская Т.А., Барч Г., Колинько В.Г., Романовский Ю,М. Модели
автоволновой подвижности плазмодия миксомицета.//Динамика кле-
точных популяций. - Горький: Изд-во Горьк. ун-та. 1984. - С. 75.
13. Аршавский Ю.И., Беркинблит М Б., Ковалев С.А., Чайлахян Л.М.ЦБпо-
физнка. - 1964. - Т.9, вып. 3. - С. 365-371.
14. Асташкина Е.В., Романовский Ю.М. Флуктуации в процессе самооргани-
зацин//Математические модели в экологии. - Горький: Изд-во Горьк.
ун-та, 1980. - С. 74-82.
15. Афраймович В.С., Рабинович М.И., Сбитнев Д.И.//Пнсьма в ЖЭТФ. -
1985. - Т. 11. вып. 6. -С. 338-342.
16. Афраймович В.С., Рабинович М.И., Угодчиков А.Д.//Письма в ЖЭТФ. -
1983. -Т. 38, вып. 2. -С. 64-67.
17. Ахромеева Т.С., Курдюмов С.П., Малинецкий Г.Г., Самарский A.A. Ij
ДАН СССР. - 1984. -Т. 279. №5.-С. 1091-1096.
18. Бабский В.Г., Маркман Г.С., Уринцев А.Л.//Молекулярная биология
(межвузовский сб.). - Вып. 30. - Киев: Наук, думка, 1982. - С. 82- 93.
230
19. Базыкин А.Д., Хибник Л .Я.//Биофизика. - 1982. - Т.27. - С. 132-135.
20. БалаховскиЦ Я.С.//Бнофнзика. - 1965. - Т.10. - С.1063.
21. Балеску Р. Равновесная н неравновесная статистическая механика. -
М.: Мир, 1978.
22. Балкарей Ю.И., Евтихов М.Г., Елинсон М.Я.//Микроэлектроника. -
1980. -Т. 9. - С. 141-143; 1983. - Т. 12. - С. 65-69, 171-176.
23. Балкарец Ю.И., Никулин М.Г., Елинсон М.И. Твердотельные автоволно-
вые системы// [1]. — С. 117-134.
24. БарановскиЦ З.П. Связь волновых явлений с миграцией плазмодия
миксомнцета//Немышечные формы подвижности. - Пущино: ОНТИ
ЦЦБИ АН СССР, 1976. - С. 47.
25. Барелко В.В. Процессы самопроизвольного распространения гетероген-
но-каталитической реакции по поверхности катализатора. - Препринт/
ОИХФ АН СССР. - Черноголовка, 1977.
26. Барелко В.В., Баркалов И.М., Ваганов ДА. и др.//ДАН СССР. - 1982.-
Т. 264, № 1. - С. 99-102.
27. Барелко ВД., БеЦбутян В.М., Володин Ю.Е., Зельдович Я.Б. Тепловые
волны и неоднородные стационарные состояния в системе //[1]. - С.
135-148.
28. Баренблатт Г.И., Вишик М.И. //ПММ. - 1956. - Т. 20, вып. 3.
29. БаренблаттГ.И., Зельдович Я.Б.ЦУМН. - 1971. - Т. 26. - С. 115-151.
30. Баруча-Рид А.Т. Элементы теории марковских процессов и их приме-
нение. - М.: Наука, 1969.
31. Барьяхтар В.Г., Иванов БА., СукстанскиЦ АЛ.//Пнсьма в ЖТФ. -
1979. - Т. 5. - С. 853-856; Письма в ЖЭТФ. - 1978. - Т. 27 - С. 226-
229.
32. Белинцев Б.Н. Динамические коллективные свойства развивающихся
клеточных систем: Дне. канд. фнз.-мат. наук. - М., 1979.
33. Белинцев Б.Н.//УФН. - 1983. - Т. 141, вып. 17. - С. 55-101.
34. Белоусов Б.Н. Периодически действующая реакция и ее механизм//
[1].-С.176-189.
35. Берман В.С., Данилов Ю.А.//ДАН СССР. - 1981. - Т. 258. - С. 67-70.
36. Бернс Б. Неопределенность в нервной системе. - М.: Мир, 1969.
37. Блехман И.И. Синхронизация в природе и технике. - М.: Наука,
1981.
38. Бобырев В А., Бункин Ф.В., Кириченко Н.А. и др. Эффекты обострения
и локализации в задачах лазерной термохнмнн.-Препрннт/ИОФ АН
СССР. -М., 1985. -№ 285.
39. Богач П.Г., Решодько Л.В. Алгоритмические и автоматные модели
деятельности гладких мышц. - Киев: Наук, думка, 1979.
40. Боголюбов Н.Н. Проблемы динамической теории в статистической
физике. -М.г Гостехиздат, 1946.
41. Боголюбов Н.Н., МитропольскиЦ ЮА. Асимптотические методы в теории
нелинейных колебаний. - М.: Наука, 1974.
42. Бонч-Бруевич В.Л., Темчин Л .Я.//ЖЭТФ. - 1979. - Т. 76. - С. 1713-
.1726.
43. Бункин Ф.В., Кириченко НА., Лукьянчук Б.С.//УФН. - 1982. Т. 138. -
С. 45-94; Изв. АН СССР. - Сер. физ. - 1983. - Т 47, № 10. - С. 2000-
2016.
44. Вайнберг М.М., Треногий В А- Теория ветвления решений нелинейных
уравнений. - М.: Наука, 1969.
45. Васильев В А., Стационарные диссипативные структуры. Динамические
диссипативные структуры. //Термодинамика биологических процес-
сов. - М.: Наука, 1976. - С. 186-197; С. 198-203.
231
46. Васильев ВА., Заикин АЛ.ЦКияетнкл и катализ. - 1976. - Т. 17. -
С. 903.
47. Васильев ВЛ., Полякова М.С. - Вести. МГУ. - Сер. физика, астроно-
мия. - 1975. - С. 99-106.
48. Васильев ВА., Романовский Ю.М. Связанные автоколебательные сис-
, темы как модели ведущего центра. О роли диффузии в систе-
мах с автокатализом//Теоретическая и экспериментальная биофи-
зика. - Калининград, 1975. - Вып. 5. - С. 52. - 60; 1976. - Вып. 6. -
С. 73-87.
49. Васильев В А., Романовский Ю.М. Устойчивые орбитали и переходные
процессы в моделях биологических систем//Термодинамнка и кинети-
ка.биологических процессов/Под ред. А.И. Зотина. -М.: Наука, 1980.-
С. 355-367. Два класса процессов самоорганизации и проблема их мо-
делирования//Термодинамнка н регуляция биологических процессов/
Под ред. Зотина А.И. - М.: Наука, 1984. - С. 198-203.
50. Васильев В А., Романовский Ю.М., Чернавский Д.С. Элементы теории
диссипативных структур: связь с проблемами структурообразования//
Математическая биология развития / Под ред. А.И. Зотина и Е.В. Прес-
нова. - М.: Наука, 1982. - С. 82-101.
51. Васильев ВА., Романовский Ю.М., Яхно В.Г.ЦУФН. - 1979. -Т. 128,
вып. 4. - С. 626-666.
52. Вольперт AJH. Волновые решения параболических уравнений. - Преп-
ринт/ОИХФ.- Черноголовка, 1983.
53. Вольперт ВА., Вольперт А.И., Мержанов А.Г.//ДАН СССР, - 1982. -
Т 262. - С. 642-644; Т. 263. - С. 918-921.
54. Вольперт А.И., Иванова АН. О диффузной неустойчивости и дис-
сипативных структурах в химической кинетике//[ 1 ]. - С. 33—45.
55. Володин Ю£., Бейбутян ВМ., Барелко В.В., Мержанов А.Г.//ДМ1
СССР. - 1982. - Т. 264. - С. 604-607.
56. ВолькенштейнМ.В. Биофизика. -М.: Наука, 1981.
57. Галактионов ВА., Самарский AAJ/Мат. сб. - 1982. - Т. 118(160),
№3. -С.292-322; №4 (8) .-С.435-455.
58. Гапонов AJB., Островский ЛА., Рабинович М.И.//Изв. вузов. Радио-
физика. - 1970. - Т. 13. - С. 163.
59. Гапонов-Грехов AJ)., Рабинович Я.Я.//УФН. - 1979. - Т. 128. - С.
579.
60. Гапонов-Грехов А.В. , Рабинович М.И., Старобинец ИМ.ИДАМ СССР.-
1984.-Т. 279.-С. 596-601.
61. Григоров Л.И., Полякова М.С., Чернавский Д.С.//Молекуляр. биоло-
гия. - 1967. - Т. 1. - С. 410-418.
62. Гленсдорф Л., Пригожин И. Термодинамическая теория структур, ус-
тойчивости и флуктуаций. - М.: Мир, 1973.
63. Гольцова ЮЛ., Жислин ГМ., .Яхно 5.Г.//Биофнзнка. - 1976. - Т.21.—
С. 893.
64. Гуляев Ю.В., Калафати ЮД., Сербинов ИА., Рябова Л.//ДАН СССР. -
Т. 256. - С. 357-360.
65. Давыдов А.С. Биология и квантовая механика. - Киев: Наук, думка,
1979.
66. Данилов ЮА. Теоретико-групповые свойства математических моделей
в биологии//Математическая биология развития/Под ред. Зотина А.И.-
М.: Наука, 1982. - С. 5-15.
67. Данилов ЮА., Кадомцев Б.Б. Что такое синергетика?// Нелинейные
волны. Самоорганизация/Под ред. А.В. Гапонова-Грехова и М.И Раби-
новича. - М.: Наука, 1983. - С. 5 -16.
232
68. Дворников АЛ., Уткин ГМ. Фазированные автогенераторы радиопере-
дающих устройств. - М.: Энергия, 1980.
69. Дворянинов С.Д.//Дифференц. уравнения. - 1980. - Т. 16. - С. 1617-
1622.
ТО. Дещеревский В.И. Математические модели мышечного сокращения. -
М.: Наука, 1977.
71. Домбровский ЮА., Маркман Г.С. Пространственная н временная упо-
рядоченность в экологических и биохимических системах. - Ростов
н/Д: Изд-во Рост, ун-та, 1983.
Т2. Дородницын ВА., Еленин Г.Г. Симметрия в решениях уравнений мате-
матической физики. - М.: Знание, 1984.
73. Дрендель СД., Хоре Н.П.. Васильев ВА. Режим синхронизации клеток
гладкомышечных тканей//Динамнка клеточных популяций. - Горь-
кий: Изд-во Горьк.ун-та, 1984. -С. 108-117.
Т4. Дубинин ФД. Принцип построения оптоэлектронных моделей одно-
родных биологических систем с Л.Т. н Р.В.// Проблемы бионики. -
Харьков: Изд-во Харьк. ун-та. - Вып. И. - С. 95.
75. Дудник Е.Н., Кузнецов ЮМ., Минакова ИМ.//Радиоэлектроника. -
1984. -Т. 27, №7. -С. 37-42.
76.Евдокимов МД., Приезжее АД., Романовский Ю.М.//Автометрия. -
1982, №3.-С. 61-65.
77 .Еленин Г.Г., Крылов ВД,, Полежаев АА., Чернавский Д.С. / / ДАН СССР-
1983. -Т. 271. - С. 84 -87.
78. Еленин Г.Г., Курдюмов С.П. Условия усложнения организации нели-
нейной диссипативной среды. - Препринт/ИПМ АН СССР. - М., 1977.—
№ 106.
79. Елеонский В.М., Кирова НМ., Кулагин НД.ЦУКЭТФ. - 1978. - Т. 74,
№ 5. - С. 1814-1820.
80 .Ермаков В.Б., Приезжее 4.В.//Биофнзнка. - 1984. - Т. 25. - С. 100-
104.
81. Жаботинский AM. Концентрационные автоколебания. - М.: Наука.
1974.
82. Жаботинский AM., Корзухин МД. Математическое моделирование ки-
нетики гомогенных химических систем//[113]. - С. 223-231.
83. Жислин ГМ., Яхно В.Г., Гольцова Ю.К.//Бнофнзнка. - 1976. - Т. 21,
вып. 4. - С. 792.
84. Жуков СД., Барелко ВД., Бокова Л.Ф. //[1 ]. - С. 149-165.
85. Жуков СА„ Барелко В.В., Мержанов А.Г. //ДАН СССР. - 1978. -
Т. 242, №5. - С. 1064-1066; 1979. - Т. 245, № 1. - С. 94-97.
86. ЗаикинАД.//Биофизика. - 1975- - Т. 20. - С. 616-620.
87. ЗаикинАЯ., Жаботинский А.М.ЦЖФХ.. - 1971. - Т. 45. - С. 265.
88. Заикин АМ., Кокоз Ю.М.//Бнофизнка. - 1977. - Т. 22. - С. 113-116.
89. Заикин АЛ., Морозова Т.Я,//Биофизика. - 1979. - Т. 24. - С. 124-
128.
90. Зайцев АА.,Джерпетов ХЛ.//ЖЭТФ. - 1953. - Т. 24, вып. 5. - С. 516.
91. Зельдович Я.Б., Баренблатт Г.И., Либрович В.Б., Михвиладзе ГМ.
Математическая теория горения и взрыва. - М.: Наука, 1980.
92. Зельдович Я.Б. Компа нее ц А.С. К теории распространения тепла при
теплопроводности, зависящей от температуры. // К 70-летию
А.Ф. Иоффе. - М.: Изд-во АН СССР, 1950. - С. 61-71.
93. Зельдович Я.Б., Маломед БА.Ц Изв. вузов. Радиофизика. - 1982. -
Т. 25. - С. 591-618.
94. Зельдович Я.Б., Фронк-Каменецкий ДА.1ГЙМ/Х.. — 1938. - Т. 12. -
С. 100; ДАН СССР. - 1938. - Т. 19. - С. 693-698.
233
95. Змитриенко НЛ., Курдюмов С.П., Михайлов А.П., Самарский АА.Ц
Письма в ЖЭТФ. - 1977. - Т. 26, вып. 9. - С. 620-623.
96. Зубарев Д.Н. Неравновесная статистическая термодинамика. - М.:
Наука, 1971.
97. Зыков В.С. Моделирование волновых процессов в возбудимых сре-
дах. - М.: Наука. 1984.
98. Иванов СА., Романовский Ю.М.ЦРЭ. - 1963. - T9. - С. 551-560.
99. Иванов Л.П., Логгинов А.С., Непокойчицкий Г.Я.//ЖЭТФ. - 1983. -
Т. 84, №3. - С. 1006-1022.
100. Иваницкий Г.Р., Кринский ВЛ., Сельков Е.Е. Математическая биофи-
зика клетки. -М.: Наука, 1978.
101. Ивлева Т.П., Шкадинский К.Г., Мержанов А.Г.1 /ДАН СССР. - 1978.-
Т. 239. №5. - С. 1086-1088.
102 Ильинова Т.М., Хохлов Р.В. //РЭ. - 1963. - Т. 8, № 12. - С 2006 -
2013.
ЮЗ.Калафати ЮЛ., Сербинов ИА., Рябова ЛЛ.//Письма в ЖЭТФ. - 1979. —
Т. 29. - С. 637-641; ДАН СССР. - 1982. - Т. 263. - С. 862.
1О4.Каиввец В.И., Стабинис А.Ю.Ц РЭ. - 1972. - Т. 17. - С. 2124-2130.
ЮЗ.Канель Я.И.//Мггт. сб. -1962. - Т.59 (101). - С. 245; 1964. - Т.65
(107). - С. 398.
106. Караганов ЯЛ., Кердиваренко Н.В., Левин ВЛ. Микроангоилогня.
Атлас. - Кишинев: Штиинца, 1982.
101. Кернер Б.С., Осипов ВЛ.//ЖЭТФ. - 1978. - Т. 74. - С. 1675-1696;
1980. -Т. 79. - С. 2218-2247; 1982. - Т. 83. - С. 2201-2214.
108. Кернер Б.С., Осипов В Л. //ДАН СССР. - 1982. - Т. 264. - С. 1366-1370;
1983. - Т. 270. - С. 1104-1108.
109. Кернер Б. С., Синкевич В.Ф.//Пнсьма в ЖЭТФ. - 1982. - Т. 36. - С. 359.
110. Климонтович ЮЛ. Кинетическая теория электромагнитных процессов.-
М.: Наука, 1980.
111. Климонтович ЮЛ. Статистическая физика. - М.: Наука, 1982.
112. Клочков БЛ, Автоволновые процессы в кровеносных сосудах мышеч-
ного типа//[ 1 ].-С. 233-242.
113. Колебательные процессы в биологических и химических снстемах/Под
ред. Франка Г.М. - М.: Наука, 1967.
114. Колмогоров АЛ., Петровский И.Г., Пискунов Н.С.//Бюл. МГУ. - Секц.
А.1. - 1937. - №6. - С.1-26.
115. Королева В.И., Кузнецова Г.Д. Свойства распространяющейся депрес-
сии в коре головного мозга крысы при создании двух калийных оча-
гов//Электрнческая активность головного мозга. - М.: Наука, 1971.—
С. 130.
116. Кринский В.Я.//Биофизика. - 1966. - Т. 11. -С.676; Пробл. киберне-
тики. - 1968. - Т. 20. - С. 59-80.
117. Кринский В.И., Агладзе К. Я.//ДАН СССР. - 1982. Т. 263. - С. 335.
118. Кринский В.И., Кокоз 70.Л7.//Бнофнзнка. - 1973. - Т. 18. -С. 506-513;
С. 1067-1074.
119. Кринский В.И., Жаботинский А.М. Автоволновые структуры и перспек-
тивы их исследования//[ 1 ]. - С. 6-32.
120. Кринский В.И., Михайлов А.С. Автоволны. - М., Знание, 1984.
121. Кринский В.И., Холопов А.В.//БиОфизнка. - 1967. - Т. 12. - С. 669.
122. Кринский В.И., Яхно В.Г. Спиральные волны возбуждения в сердечной
мышце//Нелинейные волны. Стохастичность и турбулентность/Под ред.
М.И. Рабиновича. - Горький: ИПФ АН СССР, 1980. - С. 200-214.
123. Кузнецов С.П., Пиковский А.С.//Радиофизика. - 1985. - Т. 28. -
С. 308-309.
234
124. Кузнецов Ю.А. Существование н устойчивость бегущих волн в систе-
ме ’’реакция-диффузия” с одной пространственной переменной. -
Препринт/НИВЦ АН СССР. - Пущино, 1982.
125. Курдюмов СП. Собственные функции горения нелинейной среды кон-
структивные законы построения ее органнзации//Современные проб-
лемы математической физики н вычислительной математики/Под ред.
акад. А.Н. Тихонова. - М.: Наука, 1982. - С. 217-243.
126. Курдюмов С.П., Куркина Е.С., Потанов А.Б., Самарский 4.4.//ДАН
СССР. - 1984. - Т. 274. - С. 35.
127. Курдюмов СП., Малинецкий Г.Г., Повещенко Ю.А.ЦИАН СССР. -
1980. - Т. 251, №4. - С. 836-839.
128. ЛайтфутЭ. Явления переноса в живых системах. - М.: Мир, 1977.
129. Ланда П.С. Автоколебания в системах с конечным числом степеней
свободы. - М.: Наука, 1980; Автоколебания в распределенных систе-
мах. - М.: Наука, 1983.
130. Ландау Л.Д., Лифшиц Е.М. Статистическая физика. - М.: Наука, 1976.
131. Лихарев К.К. Введение в динамику джозефсоновских переходов. -
М.: Наука, 1984.
132. Лишутина Г.Б., Романовский Ю.М. О колебаниях диффузионно связан-
ных химических осцнлляторов//[113]. - С. 267-273.
133. Логгинов А.С, Непокойчицкий Г.4.//Письма в ЖЭТФ. - 1982. - Т. 35,
№ 1. - С. 22-25.
134. Лыков А.В. Тепломассообмен. - М.: Энергия, 1978.
135. Малахов А.Н., Мальцев 4.4.//ДАН СССР. - 1971. - Т. 196, № 5. -
С. 1065.
136. Мальцев 4.4.//Изв. вузов. Радиофизика. - 1977. - Т. 20. - С. 1570—
1572.
137. Маркин В. С, Пастушенко В.Ф., Чизмаджиев Ю.А. Теория возбудимых
сред. - М.: Наука, 1981.
138. Марри Д, Нелинейные дифференциальные уравнения в биологии. Лек-
ции о моделях. - М.: Мир, 1982.
139 Мержанов А.Г. Тепловые волны в химнн//Тепло- и массообмен
процессов горения. — Черноголовка: ОИХФ АН СССР, 1980. -
С. 36 - 58.
140. Мигулин В.В., Медведев В.И., Мустель Е.Р., Парыгин В.Н. Основы тео-
рии колебаний. - М.: Наука, 1978.
141. Митропольский Ю.А. Метод усреднения в нелинейной механике. -
Киев: Наук, думка, 1971.
142. Михайлов А.С., Упоров И.5.//ЖЭТФ. - 1980. - Т. 79, вып. 5. - С. 1958.
143. Моргалев Ю.Н., Демченко И.Т.ЦФнзноп. журн. - 1979. — Т. 65, № 7. -
С. 985-990.
144. Морнев СА. Об условиях возбуждения одномерных автоволновых
сред// [1]. -С. 92-98.
145. Николис Г., Пригожин И. Самоорганизация в неравновесных систе-
мах. - М.: Мир. 1979.
146. Островский Л.А., Яхно 5.Г.//Биофизика. - 1975. - Т. 20. - С. 489.
147. Панфилов А.В., Перцев А.М. //Биофизика - 1982. - Т. 27. - С. 886-889.
148. Перцев А.М., Панфилов А.В. Спиральные волны в активных средах.
Ревербераторе моделях Фитц-Хью -Нагумо//[1]. - С. 77-84.
149. Перцев А.М., Панфилов А.В., Медведева Ф.У. — Биофизика. - 1983. —
Т. 28. - С. 100.
150. Перцев А.М., Храмов Р.Н., Панфилов А.В. //Биофизика. - 1981. -
Т. 26, №6. - С. 1077-1081.
151. Пиковский А.С. //Письма в ЖТФ. - 1985. - Т. 11. - С. 672-675.
235
152. Пиковский А.С., Сбитнев В.И. Стохастнчность в системе связанных
осцилляторов. - Препринт / ЛИЯФ АН СССР. - Ленинград, 1981;
Дифференц. уравнения. - 1981. - Т. 17. - С. 2104-2105.
153. Полак Л.С., Михайлов А.С. Процессы самоорганизации в физико-хими-
ческих системах. - М.: Наука, 1983.
154. Полякова М.С. - Вести. МГУ. Сер. 3, Физика, астрономия. - 1974. -
Т. 14. - С. 643-648.
155. Полякова М.С., Романовский Ю.М., Сидорова Г.А. - Вести. МГУ. Сер. 3,
Физика, астрономия. - 1968. - № 6. - С. 86-89.
156. Рабинович М.И. // Изв. вузов. Радиофизика. - 1974. - Т. 17. - С. 477.
157. Рабинович М.И., Трубецков Д.И. Введение в теорию колебаний и волн. -
М.. Наука, 1984.
158. Регирер С.А.Ц¥1зн. АН СССР. МЖГ. - 1984. - № 5. - С- 89-97.
159. Регирер С. А., Руткевич ИМ. //Изв. АН СССР. МЖГ. - 1975.-№1.-С. 45.
160. Розанов Н.Н.ЦИзв. АН СССР. - Сер. физ. - 1982. - Т. 46. - С. 1886.
161. Розенблюм Л.А., Старобинец И.М., Яхно В.Г.Ц[ 1 ]. - С. 107.
162. Романовский Ю.М. Процессы самоорганизации в физике, химии и био-
логии. - М.: Знание, 1981.
163. Романовский Ю.М., Степанова Н.В., Чернявский Д.С. Математическое
моделирование в биофизике. - М.: Наука, 1975; Математическая био-
физика. - М.: Наука, 1984.
164. Руткевич И.М.//Изв. АН СССР. МЖГ. - 1975- - С. 86.
165. Самарский А.А. Теория разностных схем. - М. : Наука, 1983.
166. Самарский А.А., Еленин Г.Г., Змитриенко Н.В. н др.//ДАН СССР. -
1977. -Т. 237, №6. - С. 1330-1337.
167. Самарский А.А., Змитриенко Н.В., Курдюмов СП., Михайлов А.П.Ц
ДАН СССР. - 1976. - Т. 227, № 2. - С. 321-324.
168. Сбитнев В.И. Сгохастцчиостьв системе связанных вибраторов//Нелиней-
ные волны, стохастнчность и турбулентность. - Горький: ИПФ АН СССР,
1980. - С. 46-56.
169. Свирежев Ю.М., Гигаури А.А., Разжевайкин В.И. Волны в экологии//Не-
лннейные волны. Самоорганизация/Под ред. А.В. Гаионова-Грехова
и М.И. Рабиновича. - М.: Наука, 1983. - С. 32-46.
170. Сендов Б.Х. Математические модели процессов деления и дифферен-
цировки клеток. - М.: Изд-во МГУ, 1976.
171. Сербинов И.А., Калафати Ю.Д., Рябова ЛЛ.//Письма в ЖТФ. - 1980. -
Т. 6, №4. - С. 196-200.
112. Скобелева И.М. //Механика композит, материалов. - 1980. - № 1. -
С. 107.
173. Скотт Э. Волны в активных и нелинейных средах в приложении к элект-
ронике. - М.: Сов. радио, 1977.
174. Скотт Э., Маклафлин Д. Солитон - новое понятие в прикладных нау-
ках//[173]. - С. 215-284.
175. Смолянинов В.В. Математические модели биологических тканей. -
М.: Наука, 1980.
176. Смолянинов В.В., Блиох Ж.Л. Механика движения фибробластов.//Не-
\ мышечные формы подвижности. - Пущино: ОНТИ НЦБИ АН СССР,
1976. - С. 5.
177. Стратонович Р.Л. Избранные вопросы теории флуктуаций в радиотех-
нике. - М.: Сов. радио, 1961.
178. Стратонович Р.Л. Нелинейная неравновесная термодинамика. - М.:
Наука, 1985.
179. Стратонович Р.Л., Романовский Ю.М. //Науч. докл. Высш. шк. - 1958,
№4. - С. 221-225.
236
180. Стрелков С.П. Введение в теорию.колебании. - М.: Наука, 1964.
181. Таланов В.И. Стимулированная диффузия и кооперативные эффекты
в распределенных кинетических системах//Нелинейные волны. Самоор-
ганизация. - М.: Наука, 1983. - С. 47-56.
182. Теплое В.А., Бейлина С.И., Евдокимов М.В., Приезжее А.В., Романовс-
кий Ю.М. Автоволновые механизмы внутриклеточной подвнжнос-
ти//[1 ]. - с. 190-201.
183. Тихонов А.Н. //Мат. сб. - 1952. - Т. 31, вып. 3. - С. 575.
184. Фомин С.В., Беркинблит М.Б. Математические проблемы в биологии -
М.: Наука, 1973.
185. Франк-Каменецкий Д.А. Диффузия и теплопередача в химической
кинетике. -М.: Наука, 1967.
186. Хаазе Р. Термодинамика необратимых процессов. - М.: Мир, 1967.
187. Хакен Г. Синергетика. - М.: Мир, 1980.
188. Хаютин В.М. Механизм управления сосудами работающей скелетной
мышцы. - Гистохимическая гипотеза//Проблемы современной физио-
логической науки. - Л.: Наука, 1971. - С. 123.
189. Холопов А.В. //Биофизика. - 1968. - Т. 13, вып. 4. - С. 670.
190. Цетлин М.Л. Исследование по теории автоматов и моделированию био-
логических систем. - М.: Наука, 1969.
191. Чернавская Н.М., Чернавский Д.С. //УФН- - I960. - Т. 72. - С. 627-652.
192. Шабан В.М. //Успехи физнол. наук. - 1976. - Т. 7, № 2, - С. 57.
193. Шкадинский К.Г., Хайкин Б.Н, Мержанов А.Г. //Физика горения и взры-
ва. - 1971. -№ 1. - С. 19-28.
194. Шноль С.Э. Физико-химические факторы биологической эволюции. -
М.: Наука, 1979.
195. Эбелинг В. Образование структур при необратимых процессах. - М.:
Мир, 1979.
196. Эйген М„ Шустер П. Гиперцикл. Принципы самоорганизации макромо-
лекул. - М.: Мир, 1982.
197. Яхно В.Г.//Биофизика. - 1975. - Т. 20, №4. - С. 669.
198. Яхно В.Г. //Биофизика. - 1976. - Т. 21, № 3. - С. 547.
199. Яхно В.Г. //Биофизика. - 1977. - Т. 22, № 5. - С. 876.
200. Яхно В.Г. //Биофизика. - 1978. - Т. 23, № 4. - С. 654.
201. Яхно В.Г. Автоволновые процессы в одномерных релаксационных сис-
темах//[1]. -С. 46-76.
202. Яхно В.Г, Гольцова Ю.К., Жисаин Г.М. //Биофизика. - 1976. - Т. 21,
№6. - С. 1067.
203. 4gfadze К.1., Krinsky y.I./Ihlatwte. - 1982. - V. 296. - Р. 424.
204. Allen R.D., Allen N.S./IAnn. Rev. Biophys. Bioeng. - 1978. - V. 7.-
P. 469-495.
205. Belousov L.V. Synergetic and Biology Morphogenesis//[254]. - P. 204-208.
206. Beylina S.I., Matveeva N.B., Romanovsky Yu.M. et al Plasmodium of the
Myxomycete Physarum Polycephahim as an Autowave Self — Organitir.g
System//!254J. - P. 218-223.
207. Butuzov V., Vasileva A. Singulary perturbed differential equations of para-
bolic type//Lecture Notes in Mathematics 1985. Asymptotic Analysis. II/Ed.
Verhulst F.B. - Heidelberg, N.Y., Tokyo: Springer-Verlag, 1983. - P. 38-75.
208. ChstenR.C, Cohen H., Lagerstrom Р.А.//Quart. Appl. Math. - 1975. -V. 32. -
P. 365.
209. ChafeeN.I/1. Diff. Equat. - 1974. - V. 15. - P. 522-540.
210. Chemavsky D.S., Ruigrok 7%.B<//Biosystems. <- 1982. - V. 15. - P. 75-81.
237
211. Chernavsky D.S., Solyanik G.I., Belousov L. V.//Biol. Cybernetic. - 1980. -
V. 37. - P. 8-18;
212. Gorelova N.A., Bures 1.ЦЗ. of Neurobiology. - 1983. - V. 14. - P. 353-363.
213. Cow B.S.//Cardiovase. Fluid. Dynam. - 1972. - V. 2. - P. 64-100.
214. Crutshfield 7.Pf//Physica. - 1984. - V. 10 D - P. 229-245.
215. Ebeling WJ/Ann. Physik. - 1965. - V. 16. - P. 147; Beitr. Plasmaphysik. -
1967.-V. 7.-P. 11.
216. Ebeling W., Feistel R. Physik der Selbst-organisation und Evolution. - B.;
Academie-Verlag, 1982.
217. Ebeling W„ Feundel U.U Ann. Physik. - 1983. - V. 40. - P. 68.
218. Ebeling W., Klimontovich Yu.L. Selbstorganization and Turbulence in Liqu-
ids. — Leipzig: Teubner Text zur Physik, 1984.
219. Ebeling W., Klimontovich Yu.L., Kovalenko N.P. et al. Transport Properties
of Dense Plasmas. - B.: Academie-Verlag. 1983; Basel: Birhauser-Verlag, 1984.
220. Ebeling W., Schimansky-Geier £.//Physica. - 1979. - V. 98A. - P. 587.
221. Emeus Th., Herschkowitz-Kaufman М.Ц1. Chem. Phys. - 1977. - V. 66. -
P. 248.
222. Falkenhagen H. Theorie des Elektrolyte. - Leipzig: Hirzel-Verlag, 1971.
223. Falkenhagen H, Ebeling W.//Phys. Lett. - 1965. - V. 15. - P. 131.
224. Field R.J., Noues R.MJI1. Chem. Phys. - 1974. - V. 60. - P. 1877-1884.
225. Fisher R.l/Ann.. of Eugenics. - 1937. - V. 7. - P. 335-369.
226. Gaponov-Grekhov A. V., Rabinovich M.I. Nonstationares Structures - Chaos
and Order//Synergetics of the Brain/Ed. Haken H. - B., Heidelber, N.Y.,
Tokyo: Springer-Verlag, 1983.
227. Gerish G./ICun. Top. Deo. Biol. - 1968. - V. 3. - P. 157. Biol. Cellulaire. -
1978.-V. 32.-P. 61-68.
228. Gurija G.T., Livshits M. A.I/Phys. Lett. - 1983. - V. 97. - P. 175.
229. Hodgkin A.L., Huxley A.F. //J. Physiol. (Engl.). - 1952. - V. 117. -
P. 500-544.
230. Hunter P.L., Naughton P.A., Noble DJIPxogr. Biophys. Molec. - 1975. -
V. 30, №2/3.-P. 99.
231. Ibanez I. L., Velarde M.GJЦ. de Physiq. - 1977. - V. 38. - P. 1479.
232. Johnson P.S.//Circulation Research. - 1968. - V. 22. - P. 199-212.
233. Kabashima S., Kawakubo T.//Phys. Lett. - 1981. - V. 70A. - P. 375-376.
234. Kahrig E., Beberdich H. Dessipative Strukturen. - Leipzig: VEB Georg Thie-
me, 1977.
235. Kessler D. Plasmodial structure and motivity//Cell Biology of Physarum and
Didymium. - N.Y.: Acad. Press., 1982. - P. 145-208.
236. Koga S.//Progr. of Theor. Phys. - 1982. - V. 67. - P. 164-178.
237. Koga S., Kuramoto Y./IPtogt. of Theor. Phys. - 1980. - V.63. - P. 106-121.
238. Kowalenko N.P., Ebeling IP.//Phys. Stat. Solid. - 1968. - V. 30. - P. 533.
239. Kuramoto Y. Chemical oscilations, waves, and turbulence. - B. Heidelberg,
N.Y., Tokyo: Springer-Verlag, 1984.
240. Levandovsky M., Childress W.S., Spiegel E.A., Hunter S.H. I /J. Protozoology. -
1975. - V. 22. - P. 296-306.
241. Linde H. Marangoni-Instabilities//Convective Transport and Instabilites/Ed.
Zierep J., Oertel H. - Karlsruhe: Braun, 1983.
242. Lindemayer A. Ji. Theor. Biol. - 1971. - V. 30. - P. 445.
243. Linkes D.A.//BME. - 1980. - V. 27, №7. - P. 351-357.
244. Livshits M.A., Gurija G.T., Belintsev B.N., Volkenstein M.VJIJ. Math. Bio-
logy. - 1981. - V. 11. - P. 295-310.
245. 1.otka A.J. Elements of Physical Biology. - Baltimore: Williams and Wilkins,
1925.
246. Lvovsky Yu.M., Lutsev M.O.//Cryogenics. - 1979. - V. 19. - P. 483—489
238
247. Mangel A., Fahim M., Breemen G.//Nature. - 1981. - V. 289. - P. 692.
248. Mikhailov A.S., Krinsky «/.//Physica. - 1983. - V. 3D. - P. 346-371.
249. Nagumo I., Yoshizawa S., Arimoto S.l/Proc. IEEE. - 1965. - V. ct-12,
№3, -P. 400.
250. Noble D.//J. Physiol. (Engl.). - 1962. - V. 160. - P. 317-352.
251. Ortoleva F, Ross J.//J. Chem. Phys. - 1973. - V. 58. - P. 5673; 1974. -
V.60. - P. 5090-5107.
252. Rossler O.E.HZ. Naturforsch. - 1979. - V. 31 A. - P. 1168.
255.Reshodko L.V., Bures J.//B1O1. Cybernetics. - 1975. - V. 18. - P. 181.
254. Self-Organization. Autowaves and Structures Far from Equilibrium/Ed.
Krinsky V.L - B., Heidelderg, N.Y. - Tokyo: Springer-Verlag, 1984.
255. Selfridge O.//Arch. Inst. Cardiology Mexico. - 1948. - V. 18. - P. 177.
256. Scimansky-Geier L., Mikhailov A.S., Ebeling h<//Ann. Physik. - 1983. -
V. 40.-P. 277.
257. Shimansky-Geier L„ Ebeling W.//Ann. Physik. - 1983. - V. 40. - P. 10.
258. Starobinets 1.М., Yakhno V.G. One-Dimentional Autowaves, Methods of
Qualitative Description//) 254]. - P. 98-102.
259. Stern C.D., Goodwin В.С.Ц5. Embryol. Expl. Morphol. - 1977. - V. 41. -
P. 15-22.
260. Turing A.M.//Proc. Roy. Soc. B. - 1952. - V. 237. - P. 37-71.
261. Vasilev V.A., Romanovskii Yu.M., Chernavskii D.S., Yakhno V.G. Autowave
Processes in Kinetic Systems. Spatial and Temporal Self-Organization in
Physics, Chemistry, Biology and Medicine. - B.: VEB Deutscher Verlag der
Wissenschaften, 1986.
262. Velarde M.G., Antoranz 7.C.//Phys. Lett. - 1979. - V. 72A. - P. 123-127.
263. Wiener N., Rosenblueth A.//Arch. Inst. Cardiologia de Mexico. - 1946. -
V. 16, №3-4. (Русский перевод. - Кибернетический сб. М.: ИЛ,
1961.-№3.)
264. Winfree А.Т.//Science. - 1972. - V. 175. - Р. 634. The Geometry of Bio-
logical Time. - N.Y., Heidelberg, B.: Springer-Verlag, 1980.
265. Wohlfarth-Bottermann K.E.HActa Protozool. - 1979. - V. 18. - P. 59-73.
J. Exp. Biol. - 1979. - V. 81. - P. 15-32.
266. Zaikin A.N., Kawczynski A.M.//J. Non-Equilibrium Thermodyn. - 1977. -
V. 2. - P. 39.
267. Zaikin A.N., Zhabotinsky A.M.//Nature. - 1970. - V. 225. - P. 535.
268. Zhabotinsky A.M., Zaikin A.N.//3. Theor. Biol. - 1973. - V. 40. - P. 45.
ДОПОЛНИТЕЛЬНЫЙ СПИСОК ЛИТЕРАТУРЫ
Д1. Анищенко В.С., Арансон И.С., Постнов Д.Э., Рабинович М.И. Простран-
ственная синхронизация н бифуркации развития хаоса в цепочке свя-
занных генераторов//ДАН СССР. - 1986. - Т. 286, № 5. - С. 1120-1124.
Д2. Арансон И.С., Гапонов-Грехов А.В., Рабинович М.И., Старобинец ИМ.
Странные аттракторы и пространственное развитие турбулентности в
потоковых снстемах//ЖЭТФ. - 1986. - Т. 90, № 5.
ДЗ. Афраймович В.С., Веричев Н.Н., Рабинович М.И. Явление синхрониза-
ции странных аттракторов//Изв. вузов. Радиофизика. - 1986. - Т. 29,
№9.
ДЗа. Ахманов С.А., Воронцов МА., Пруидзе Д.В., Шмальгаузен В.И. Прост-
ранственная неустойчивость светового поля в нелинейной системе с
двумерной обратной связью // Препринт / МГУ. - № 53. - 1986.
Д4. Балкарец Ю.И., Голик Л.Л., Елинсон М.И. Автоволновые среды (Ис-
пользование в электронике). - М.: Знание, 1985.
Д4а.5угаев А.А., Клочков А.В. //ФТТ. - 1984. - Т. 26. - С. 3487.
Д5. Гапонов-Грехов А.В., Рабинович М.И. Автоструктуры. Хаотическая
динамика ансамблей//Нелннейные волны. Структуры в бифуркации. -
М.: Наука, 1984. - С. 8-42.
Д5а. Голубев В.Н., Рабинович М.И, Таланов В.И, Шкловер В.В., Яхно В.Г. //
Письма в ЖЭТФ. - 1985. - Т. 42, вып. 3. - С. 84-87.
Д5б.Емельянов В.И, Уварова И.Ф. // Изв. АН СССР. Сер. физ. - 1986. - Т. 50,
№6. - С. 1214-1219.
Д6. Кузнецов С.П, Пиковский А.С. Универсальность бифуркаций удвоения
периода в одномерной диссипативной среде//Изв. вузов. Радиофизика. -
1985. -Т. 28, № 3. -С. 308-319.
Дба. Никовский А.С., Рабинович М.И. О стохастических диссипативных
структурах. Термодинамика и кинетика биологических процессов /
Под ред. А.И. Зотина. - М.: Наука, 1984. - С. 204-210.
Д7. Романовский Ю.М. Флуктуации в биологической кинетнке//Вероятност-
ные методы в биологии/Под ред. В.С. Королюка. - Киев: ИМ АН УССР,
1985, С. 111-132.
Д8. Романовский Ю.М., Теплое В.А. Автоволновые течения в живых клет-
ках//Математическая теория турбулентности/Под ред. А.Н. Шарковс-
кого. - Киев: ИМ АН УССР, 1986,- С. 103-112.
Д9. Babloyants A., Hiernaux Z//Proc. Nat. Acad. Sci. USA. - 1978. - V. 71,
no4. - P. 1530-1533; BuU. Math. Biol. - 1978. - V. 37. - P. 637-657.
HlO.Engelbrecht J.//Proc. Rol. Soc. (L.). - 1981. - V. A375. - P. 195-209.
240