






































































































































































































































































































































































































































Author: Попов В.А. Полянин А.Д. Полянин В.Д. Путятин Б.В.
Tags: математика физика высшая математика теоретическая механика
ISBN: 5—7753—0001—7
Year: 1996
Similar




Text
КРАТКИЙ
СПРАВОЧНИК
ДЛЯ ИНЖЕНЕРОВ
И СТУДЕНТОВ
• ВЫСШАЯ
МАТЕМАТИКА
• ФИЗИКА
• ТЕОРЕТИЧЕСКАЯ
МЕХАНИКА
• СОПРОТИВЛЕНИЕ
МАТЕРИАЛОВ
МОСКВА
МЕЖДУНАРОДНАЯ ПРОГРАММА ОБРАЗОВАНИЯ
1996
УДК 51+53
К
Краткий справочник для инженеров и студентов: Высшая матема-
математика. Физика. Теоретическая механика. Сопротивление материалов. /
Полянин А. Д., Полянин В. Д., П о п о в В. А., Путятин Б. В.,
С а ф р а й В. М., Черноуцан А. И. — М.: Международная программа
образования, 1996. —432 с.
Краткий многопрофильный справочник содержит основные понятия, законы,
формулы, теоремы и методы высшей математики, физики, теоретической меха-
механики и сопротивления материалов. Предельно сжатое и ясное изложение позволяет
читателю быстро найти (или восстановить в памяти) необходимую информацию.
Во всех разделах разобраны примеры, поясняющие существо рассматриваемых
вопросов и методов решения задач.
Книга не имеет аналогов в справочной литературе и окажет неоценимую по-
помощь широкому кругу инженеров и студентов (и будет полезна для преподава-
преподавателей вузов и научных работников). Ее удобно использовать для систематизации
знаний и при подготовке к экзаменам и зачетам.
Табл. 4. Ил. 172. Библиогр. 90 назв.
Рецензенты: доктор физико-математичесих наук А. А. Варламов,
доктор физико-математичесих наук А. В. Манжиров,
доктор технических наук В. В. Парцевский
Издание осуществлено при участии фирмы «Левша»
к 1600000000—001 Без объявл © Aj д. Полянин, В. Д. Полянин,
У2*{и4)-УЬ в д Попов^ Б в ПутятиН1
ISBN 5—7753—0001—7 В' М' Са*Раи' А' И> Черноуцан, 1996
ОГЛАВЛЕНИЕ
Предисловие 8
ВЫСШАЯ МАТЕМАТИКА 9
1. Аналитическая геометрия на плоскости 10
1.1. Декартовы и полярные координаты. Расстояние между точками . . 10
1.2. Деление отрезка в данном отношении. Площадь многоугольника . . 11
1.3. Различные виды уравнения прямой 12
1.4. Угол между прямыми. Расстояние от точки до прямой 13
1.5. Окружность, эллипс, гипербола и парабола 14
1.6. Приведение общего уравнения кривой второго порядка к
каноническому виду 16
2. Аналитическая геометрия в пространстве 17
2.1. Системы координат в пространстве 17
2.2. Векторы 18
2.3. Действия над векторами. Скалярное произведение 19
2.4. Векторное и смешанное произведения 20
2.5. Плоскость в пространстве 22
2.6. Прямая в пространстве 23
2.7. Прямая и плоскость в пространстве 24
2.8. Поверхности второго порядка 25
3. Линейная алгебра 28
3.1. Определители 28
3.2. Матрицы 30
3.3. Системы линейных уравнений 33
3.4. Системы n-мерных векторов. Собственные значения и собственные
векторы матрицы 36
4. Основные понятия математического анализа 38
4.1. Числовые множества. Понятие функции 38
4.2. Элементарные функции и их графики 39
4.3. Предел последовательности 43
4.4. Предел функции 45
4.5. Бесконечно малые и бесконечно большие функции 47
4.6. Непрерывность 48
4.7. Асимптоты графика функции 49
5. Дифференциальное исчисление функций одной переменной ... 50
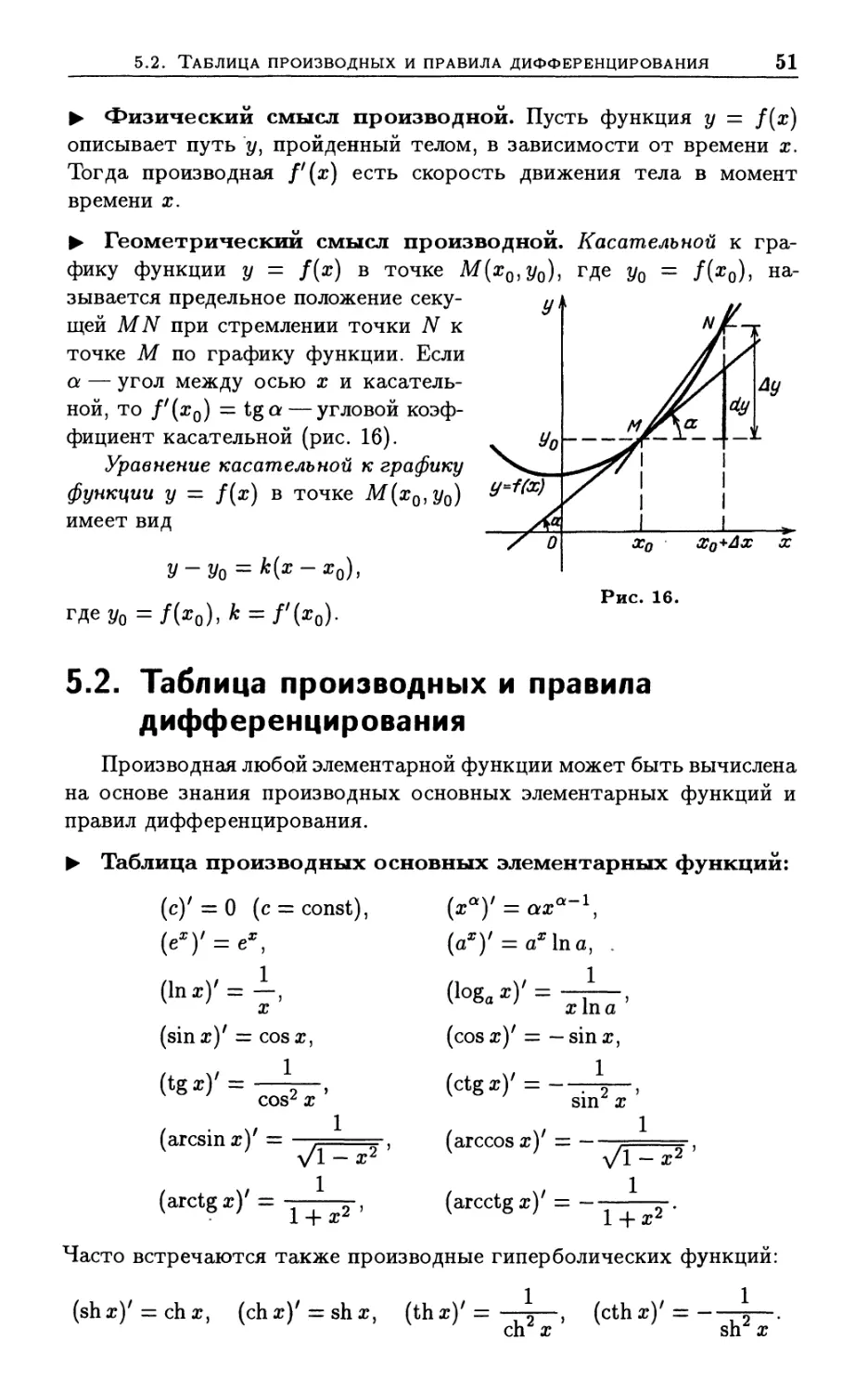
5.1. Производная и дифференциал, их геометрический и физический
смысл 50
5.2. Таблица производных и правила дифференцирования 51
5.3. Теоремы о дифференцируемых функциях. Правило Лопиталя 52
5 4. Производные и дифференциалы высших порядков. Формула
Тейлора 54
5.5. Экстремумы. Точки перегиба . 54
5.6. Общая схема исследования функции и построение графика 56
6. Функции нескольких переменных 57
6.1. Точечные множества. Функции. Предел и непрерывность 57
6.2. Дифференцирование функций нескольких переменных 58
6.3. Производная по направлению. Геометрические приложения 61
6.4. Экстремумы функций нескольких переменных 62
7. Неопределенный интеграл 64
7.1. Первообразная. Неопределенный интеграл и его свойства 64
7.2. Таблица основных интегралов. Примеры интегрирования 65
Оглавление
7.3. Интегрирование по частям. Метод замены переменной 66
7.4. Интегрирование рациональных функций 68
7.5. Интегрирование иррациональных функций 70
7.6. Интегрирование показательных и тригонометрических функций . . 71
8. Определенный интеграл 72
8.1. Основные определения. Геометрический смысл определенного
интеграла 72
8.2. Свойства определенного интеграла 73
8.3. Геометрические и физические приложения определенного интеграла 75
8.4. Несобственные интегралы 77
9. Двойные и тройные интегралы 79
9.1. Определение и свойства двойного интеграла 79
9.2. Вычисление двойного интеграла 80
9.3. Геометрические и физические приложения двойного интеграла ... 81
9.4. Определение и свойства тройного интеграла 82
9.5. Вычисление тройного интеграла. Некоторые приложения 84
10. Криволинейные и поверхностные интегралы 85
10.1. Криволинейный интеграл первого рода 85
10.2. Криволинейный интеграл второго рода 86
10.3. Поверхностный интеграл первого рода 88
10.4. Поверхностный интеграл второго рода 89
10.5. Дифференциальные операции и интегральные формулы теории поля 90
11. Ряды 92
11.1. Числовые ряды 92
11.2. Функциональные ряды 95
11.3. Степенные ряды 97
11.4. Ряд Фурье 100
11.5. Интеграл Фурье. Преобразование Фурье 102
12. Обыкновенные дифференциальные уравнения 104
12.1. Общие понятия. Уравнения первого порядка 104
12.2. Дифференциальные уравнения высших порядков 109
12.3. Линейные уравнения n-го порядка . . . у. . 111
12.4. Решение линейных однородных уравнений n-го порядка с
постоянными коэффициентами 112
12.5. Линейные неоднородные уравнения n-го порядка 113
12.6. Системы обыкновенных дифференциальных уравнений 115
13. Приближенные вычисления 118
13.1. Метод наименьших квадратов 118
13.2. Приближенное решение алгебраических уравнений 120
13.3. Вычисление определенного интеграла 121
13.4. Численное интегрирование дифференциальных уравнений 122
14. Теория вероятностей 123
14.1. Правила и формулы комбинаторики 123
14.2. Основные понятия теории вероятностей 124
14.3. Условная вероятность. Теоремы и формулы теории вероятностей . 126
14.4. Математическое ожидание и дисперсия 128
14.5. Закон больших чисел 131
Список литературы 131
Оглавление
ФИЗИКА 133
1. Физические основы механики 135
1.1. Кинематика точки 135
1.2. Кинематика твердого тела 138
1.3. Динамика 140
1.4. Закон сохранения импульса 143
1.5..Закон сохранения энергии 146
1.6. Закон сохранения момента импульса 151
1.7. Задача двух тел и движение в центральном поле 153
1.8. Поле тяготения 155
1.9. Неинерциальные системы отсчета 158
1.10. Динамика твердого тела 160
1.11. Специальная теория относительности 164
2. Молекулярная физика и термодинамика 170
2.1. Основные положения и определения 170
2.2. Первое начало термодинамики 172
2.3. Второе начало термодинамики 176
2.4. Энтропия. Свободная энергия 179
2.5. Кинетическая теория идеального газа 183
2.6. Реальные газы. Уравнение Ван-дер-Ваальса . 188
2.7. Равновесие фаз. Фазовые переходы 190
2.8. Поверхностное натяжение 192
2.9. Явления переноса в газах 194
3. Электродинамика 197
3.1. Электрический заряд. Закон Кулона 197
3.2. Электрическое поле. Напряженность поля 199
3.3. Электростатическое поле. Принцип суперпозиции для
напряженности и потенциала 199
3.4. Теорема Гаусса 203
3.5. Электростатика проводников 206
3.6. Электростатика диэлектриков 208
3.7. Конденсаторы 214
3.8. Энергия электростатического поля 215
3.9. Постоянный ток 218
3.10. Магнитное поле. Сила Лоренца и закон Ампера 223
3.11. Вычисление магнитной индукции 224
3.12. Циркуляция и поток вектора магнитной индукции 226
3.13. Магнитное поле в веществе 229
3.14. Электромагнитная индукция 234
3.15. Уравнения Максвелла 238
4. Колебания и волны 242
4.1. Гармонические колебания. Сложение колебаний 242
4.2. Свободные незатухающие колебания 245
4.3. Затухающие и вынужденные колебания 249
4.4. Упругие волны 254
4.5. Электромагнитные волны 261
5. Оптика 267
5.1. Геометрическая оптика. Фотометрия 267
5.2. Интерференция света 271
5.3. Дифракция 277
5.4. Поляризация света. Формулы Френеля 282
5.5. Дисперсия и поглощение света 287
5.6. Тепловое излучение - 290
5.7. Световые кванты Г 296
Список литературы 300
Оглавление
ТЕОРЕТИЧЕСКАЯ МЕХАНИКА 301
1. Кинематика 302
1.1. Кинематика точки 302
1.2. Кинематика твердого тела 306
1.3. Плоскопараллельное движение твердого тела 308
1.4. Произвольное движение твердого тела 310
1.5. Сложное движение точки *. ... . 311
2. Основные понятия и аксиомы механики 314
2.1. Основные понятия механики 314
2.2. Аксиомы механики 317
3. Статика 318
3.1. Основные законы и теоремы статики 318
3.2. Условия уравновешенности систем сил, приложенных к твердому
телу 319
3.3. Решение задач статики 321
3.4. Центр параллельных сил. Центр тяжести твердого тела 326
3.5. Распределенные силы 327
3.6. Законы трения (законы Кулона) 328
4. Динамика материальной точки 329
4.1. Дифференциальные уравнения движения материальной точки .... 329
4.2. Первая и вторая задачи динамики 330
5. Общие теоремы динамики механической системы 332
5.1. Основные понятия и определения 332
5.2. Теорема о движении центра масс 334
5.3. Теорема об изменении количества движения 335
5.4. Теорема об изменении кинетического момента . . 338
5.5. Теорема об изменении кинетической энергии 340
6. Принцип Даламбера. Элементы аналитической механики .... 344
6.1. Принцип Даламбера 344
6.2. Классификация механических связей. Обобщенные координаты . . , 346
6.3. Принцип возможных перемещений . 349
6.4. Общее уравнение динамики (принцип Даламбера—Лагранжа) . , . 350
6.5. Уравнения Лагранжа второго рода 351
Список литературы 353
СОПРОТИВЛЕНИЕ МАТЕРИАЛОВ 355
1. Основные понятия 356
1.1. Введение. Внешние и внутренние силы 356
1.2. Напряжения и деформации в точке 358
1.3. Основные понятия и допущения 359
2. Напряженно-деформированное состояние в точке 360
2.1. Виды напряженного состояния , 360
2.2. Одноосное растяжение и сжатие 361
2.3. Чистый сдвиг 361
3. Центральное растяжение и сжатие 363
3.1. Продольная сила 363
3.2. Напряжения и деформации при растяжении или сжатии 364
3.3. Расчеты на прочность при растяжении и сжатии 365
Оглавление
4. Кручение 366
4.1. Крутящий момент 366
4.2. Напряжения и деформации при кручении 366
4.3. Расчеты на прочность при кручении 368
5. Прямой изгиб 369
5.1. Изгибающий момент и поперечная сила 369
5.2. Напряжения и деформации при прямом чистом изгибе 372
5.3. Напряжения и деформации при прямом поперечном изгибе 374
5.4. Расчет на прочность при прямом изгибе 375
6. Сложное сопротивление • 377
6.1. Косой изгиб 377
6.2. Внецентренное растяжение или сжатие 379
6.3. Изгиб с кручением 381
7. Устойчивость сжатых стержней 383
7.1. Критическая сила 383
7.2. Формула Эйлера 383
7.3. Влияние способов закрепления концов стержня на величину
критической силы 385
7.4. Пределы применимости формулы Эйлера 385
7.5. Расчеты сжатых стержней на устойчивость . 386
Список литературы 387
ПРИЛОЖЕНИЯ 388
1. Элементарные функции и их свойства 388
1.1. Тригонометрические функции 388
1.2. Гиперболические функции 391
1.3. Обратные тригонометрические функции 392
1.4. Обратные гиперболические функции 394
2. Таблица неопределенных интегралов 395
2.1. Интегралы, содержащие алгебраические функции 395
2.2. Интегралы, содержащие иррациональные функции 399
2.3. Интегралы, содержащие тригонометрические функции 401
2.4. Интегралы, содержащие обратные тригонометрические функции . 403
2.5. Интегралы, содержащие показательные функции 404
2.6. Интегралы, содержащие логарифмические функции 405
2.7. Интегралы, содержащие гиперболические функции 405
3. Решения обыкновенных дифференциальных уравнений 406
3.1. Уравнения первого порядка 406
3.2. Линейные уравнения второго порядка 410
3.3. Нелинейные уравнения второго порядка 412
4. Ортогональные криволинейные системы координат 413
4.1. Произвольная ортогональная система координат 413
4.2. Цилиндрическая система координат р, v?, z 415
4.3. Сферическая система координат г, 0, ip 415
5. Некоторые физические постоянные 416
Предметный указатель 418
ПРЕДИСЛОВИЕ
Книга представляет собой краткий многопрофильный справоч-
справочник для инженеров и студентов. Она состоит из четырех частей:
1) высшая математика, 2) физика, 3) теоретическая меха-
механика, 4) сопротивление материалов, и содержит основные по-
понятия, законы, формулы, теоремы и методы, изучаемые в соответ-
соответствующих курсах в высших учебных заведениях (политехнических,
авиационных, транспортных, энергетических, электротехнических,
машиностроительных, химико-технологических, металлургических,
строительных, горных, нефтегазовых, военных, экономических, пи-
пищевых, текстильных и др.).
Расположение материала в каждой части книги соответствует
общепринятым программам, используемым в большинстве вузов.
Предельно сжатое и ясное изложение позволяет читателю быстро
получить (или восстановить в памяти) необходимую информацию. Во
всех разделах разобраны примеры, поясняющие существо рассматри-
рассматриваемых понятий и методов решения задач. Особое внимание уделено
вопросам, вызывающим наибольшие трудности у студентов.
Книга не претендует на роль учебника, поэтому доказательства,
как правило, не приводятся. Ее удобно использовать для получения
фактической справки (формулы, закона) и ускоренного повторения
пройденного материала при подготовке к экзаменам и зачетам.
Справочник будет также полезен широкому кругу научных работ-
работников и преподавателей вузов (не являющихся специалистами физико-
математического профиля).
Для удобства всех категорий читателей в приложении книги
приведены таблицы тригонометрических формул, неопределенных
интегралов, решений обыкновенных дифференциальных уравнений и
другие полезные справочные материалы.
Специальные шрифтовые выделения в тексте и подробное огла-
оглавление помогут читателю находить нужную информацию.
В конце каждой части книги приведен список рекомендуемых
справочников и учебников, к которым полезно обращаться при не-
необходимости иметь более подробные сведения по интересующим во-
вопросам.
Авторы
ВЫСШАЯ
МАТЕМАТИКА
Основные обозначения
detA— определитель матрицы Л;
ct — вектор, а = {а1? а2» аз)> гДе ai» a2> a3 — компоненты вектора;
|а| — модуль скаляра: |а| = а при а ^ 0 и |а| = —а при а < 0;
|<?| — модуль вектора, \а\ = y'af+af+aj;
(a, 6) — интервал a < а? < Ь;
[а, Ь] — отрезок о ^ х ^ Ь;
5 • b — скалярное произведение векторов;
а X Ь — векторное произведение векторов;
а ЬВ — смешанное произведение векторов;
grada — градиент скаляра а;
dive? — дивергенция вектора 5;
rot а — ротор вектора 3;
С^ — биномиальные коэффициенты, С^ =
к\(т - к)\ '
shx — гиперболический синус, sha: = у(е* — е~х)\
cha? — гиперболический косинус, спя = у(е* + е");
tha? — гиперболический тангенс, thx = shx/cha:;
cthrc — гиперболический котангенс, cthrc = chrc/shrc;
n! — факториалт n! = n(n — 1)... 2 • 1;
y'i 2/i> f'(x) — первая производная функции у = J(x)\
} Ухх> fN(x) — вторая производная функции у = f(x);
Аи В — объединение множеств;
А П В — пересечение множеств;
А С В — А — подмножество Б;
0 — пустое множество;
= — тождественно равно;
G — принадлежит;
_L — перпендикулярно;
|| — параллельно;
=> — следует, следовательно;
•$=>¦ — эквивалентно.
1. Аналитическая геометрия
на плоскости
1.1. Декартовы и полярные координаты.
Расстояние между точками
> Декартова прямоугольная система координат состоит из
двух взаимно перпендикулярных прямых, каждая из которых рассма-
рассматривается как числовая ось (см. разд. 4.1). Эти прямые называются
осями координат. Точка О их пересечения служит началом отсчета
для обеих осей и называется началом координат. Единицы масштаба
осей координат совпадают. Как правило, одну «из координатных осей
располагают горизонтально и считают положительным направление
вправо. Эту ось называют осью абсцисс
и обозначают буквой х или Ох. На верти-
вертикальной оси, называемой осью ординат и
обозначаемой у или Оу, положительным
обычно считают направление вверх.
Каждой точке М плоскости вза-
взаимно однозначно соответствует пара
(#о> Уо) Действительных чисел — коорди-
координат точки М. Эти числа являются ко-
координатами проекций точки М на оси
Рис. 1. х и у соответственно. Первая координа-
координата х0 называется абсциссой, а вторая координата у0 — ординатой
точки М. Координатные оси делят плоскость на четыре части, на-
называемые квадрантами (или четвертями), которые нумеруются, как
показано на рис. 1.
> Полярная система координат состоит из точки О, называемой
полюсом, и луча Ох, называемого полярной осью. Положение каждой
точки М на плоскости задается двумя полярными координатами:
полярным радиусом р = \ОМ\ и полярным углом (р = 1x0М (рис. 1).
Значения угла <р определены с точностью до слагаемого 2тгп (п —
целое число).
Декартовы прямоугольные и полярные координаты точки М
связаны соотношениями х0 = pcosp, у0 = р sirup.
Если заданы декартовы координаты х и у точки М, то полярный
радиус р = у/х2 + у2, а полярный угол <р находят из соотношения
*>g<p = у/я с учетом того, в каком квадранте лежит точка М.
Пример 1. Найти полярные координаты точки М(-3; -3).
Решение. Имеем р = \/(-3J + (-3J = 3\/2, tg tp = -fjf- = 1; так как точка М
находится в третьем квадранте, то (р = arctgl + 7Г = "j-fl".
Л
ш
У
Уо
/
0
V
у
ш
Xq X
1.2. Деление отрезка в данном отношении. Площадь треугольника 11
> Расстояние между двумя точками А(х1)у1) и В(х2,у2) (т.е.
длина отрезка АВ) обозначается через \АВ\ или р{А)В) и вычисля-
вычисляется по формуле
Р(А,В) = y/{x2-*iJ + (y2-ViJ'
> Уравнение линии. Имея систему координат, множество всех то-
точек на плоскости можно рассматривать как множество всевозможных
пар чисел х) у. Соотношения, накладываемые на х) у, определяют под-
подмножества плоскости.
Линия на плоскости обычно задается при помощи уравнения,
связывающего координаты х) у. Уравнение f(x,y) = 0 называется
уравнением линии ?, если для любой точки M(ar0, yQ) E С выполняется
равенство f(xOiyo) = 0, а для любой точки М(я0,Уо) & ? справедливо
неравенство f(xQiy0) ф 0.
Пример 2. Написать уравнение линии ?, все точки которой равноудалены
от точек А@,2) и ВD, -2).
Решение. Пусть М(я, у) — произвольная точка, лежащая на С. Имеем
р(А,М) = sjx> + (у - 2J, р(В,М)= V^tf-4J +(t; +2J.
Из условия р(А,М) = р(В,М) получим х2 +(у-2J = (х- 4J + (у + 2J. Раскрыв
скобки, находим искомое уравнение: у = х — 2, которое описывает прямую линию.
Уравнения наиболее часто встречающихся линий на плоскости
приведены далее в разд. 1.3, 1.5, 1.6.
1.2. Деление отрезка в данном отношении.
Площадь многоугольника
> Деление отрезка в данном отношении. Координаты точки
^{Х)У)) делящей отрезок АВ в отношении \АМ\ : \МВ\ = jfc, опреде-
определяются по формулам
_ хх+кх2 уг +ку2
Х У
Пример. Найти координаты середины отрезка АВ.
Решение. Середине отрезка соответствует к = 1. Подставляя это значение
#1 + Х7 t/, + у7
в последние формулы, получим искомые координаты х = —* ?-, у = — —.
2 2
> Площади плоских фигур.
1. Ориентированная площадь S3 треугольника с вершинами в
точках (ar^t/i), (x2,y2), (х3,у3):
1
2
x2
X3
У\
2/2
1
1
1
12
Аналитическая геометрия на плоскости
Если 53 = 0, то три точки лежат на одной прямой (необходимое и
достаточное условие).
2. Ориентированная площадь Sn многоугольника с вершинами в
точках (я?х,Ух), (я2,У2), •••, (*з>2/з):
При вычислении по этим формулам площадь получается положи-
положительной, если обход вершин в порядке нумерации происходит против
часовой стрелки, и отрицательной — в противном случае.
1.3. Различные виды уравнения прямой
> Общее уравнение прямой. Каждая прямая на плоскости зада-
задается в декартовой системе координат линейным уравнением
которое называется общим уравнением прямой на плоскости. Обрат-
Обратно, если А2 + В2 ф 0, то уравнение A) задает прямую.
Частные случаи уравнения A):
1) А = 0, у — —С/В — прямая параллельна оси х\
2) В = О, X = —С/А — прямая параллельна оси у;
3) С = 0, Ах + By = 0*— прямая проходит через начало координат.
Для построения прямой достаточно отметить две ее точки, коор-
координаты которых находятся из уравнения прямой.
Пример 1. Построить прямую
х - 2у - 2 = 0.
Решение. Положив у = 0, най-
найдем х = 2 и точку пересечения РB,0)
прямой с осью х. Аналогично, поло-
положив х = 0, получим точку пересечения
Q@, —1) прямой с осью у. Через точ-
точки Р и Q проводим искомую прямую
(рис. 2).
Пример 2. Построить прямую
2х + Зу = 0.
Решение. Полагая последовательно
х — 0 и х = 3, найдем точки 0@,0) и
FC, -2) и проведем через них прямую
(рис. 2).
Рис. 2.
Уравнение прямой в отрезках имеет вид
X
а
Здесь (а,0), @,6) — точки пересечения прямой с осями координат.
1.4. Угол между прямыми. Расстояние от точки до прямой 13
> Уравнение прямой с угловым коэффициентом. Бели прямая
не параллельна оси у, то ее общее урав-
уравнение можно разрешить относительно %.
переменной у. В результате получим ^^
уравнение прямой с угловым коэффи-
коэффициентом:
у = кх + Ь. B)
Параметр к, называемый угловым ко-
коэффициентом, равен тангенсу угла а,
который прямая образует с положи-
тельным направлением оси х. Пара-
Параметр 6 — ордината точки пересечения прямой с осью у (рис. 3, пря-
прямая 1).
1.4. Угол между прямыми.
Расстояние от точки до прямой
> Угол между прямыми. Угол (р между прямыми у = кхх + Ьг
и у = к2х + Ь2 (т.е. угол, отсчитанный против часовой стрелки от
первой прямой до второй — см. рис. 3) при кгк2 ф — 1 определяется
формулой
Если кхк2 = -1, то <р = 90°.
Условие параллельности прямых: кг = к2.
Условие перпендикулярности прямых: кг = —1/к2.
Угол между двумя прямыми, заданными общими уравнениями
Ахх + Вгу + Сг = 0 и А2х + В2у + С2 = 0, вычисляется с помощью
выражения
Условие параллельности прямых: Аг/А2 = Вг/В2.
Условие перпендикулярности прямых: АгА2 + ВгВ2 = 0.
> Пучок прямых — это совокупность прямых, проходящих через
данную точку MQ(xQiyQ). Уравнение прямой с угловым коэффициен-
коэффициентом к из данного пучка имеет вид
У-Уо = к(х-х0). C)
Уравнение любой прямой из данного пучка записывается так:
Л(х - х0) + В(у - у0) = 0.
14 Аналитическая геометрия на плоскости
Точка пересечения двух прямых Lx : Ахх + Вху 4- Сг = 0 и
L2 : А2х + В2у + С2 = 0 определяет пучок, который описывается
уравнением р(Агх + Вгу + Сг) + q{A2x + В2у + С2) = 0, где р, q —
некоторые числа.
Чтобы найти координаты точки пересечения прямых Lx и L2)
необходимо решить систему, состоящую из двух уравнений этих
прямых. Аналогично находятся точки пересечения любых двух линий,
заданных уравнениями.
> Уравнение прямой, проходящей через две данные точки
М(хг)уг) и N(x2}y2) (хх ф ж2, ух ф у2), имеет вид
2/ — 2/i Д-Дд
2/2 - У\ Х2~Х\
Пример. Дан треугольник с вершинами ?)(-2,0), 2?B,4), FD,0). Написать
уравнение стороны EF и высоты DH.
XI — 4 х "~" 2
Решение. Уравнение стороны EF: = или у = -2х + 8. Отсюда
находим угловой коэффициент этой прямой kEF — —2. Из условия перпендику-
перпендикулярности имеем kDH — — = —. Воспользовавшись уравнением C), получим
kEF 2
уравнение высоты DH: у - 0 = —(х + 2) или 2/ = —я + 1.
> Расстояние от точки до прямой. Расстояние S от точки с
координатами х0) yQ до прямой Ах + By + С = 0 определяется по
формуле
+ В2
1.5. Окружность, эллипс, гипербола
и парабола
> Уравнение окружности с центром в точке (х0, у0) и радиусом R
имеет вид
(х-*оJ + B/-УоJ = Д2-
В частности, уравнение окружности с центром в начале координат:
x2+y2 = R2.
> Эллипсом называется множество точек плоскости, сумма рас-
расстояний от каждой из которых до двух данных точек Fx и F2 есть
постоянная величина, равная 2а. Точки Fx и F2 называются фокусами
эллипса, а расстояние p(F1) F2) = 2с— фокусным расстоянием.
Наиболее простой вид уравнение эллипса имеет в системе коор-
координат, в которой осью х служит прямая, проходящая через фокусы,
1.5. Окружность, эллипс, гипербола и парабола
15
начало координат О совпадает с серединой отрезка F1F2) а ось у
проходит через точку О перпендикулярно оси х (рис. 4). Уравнение
эллипса в этой системе имеет вид
i у _ 1
a2 b2
и называется каноническим уравнением.
Параметр а называется большой по-
полуосью, Ь = у/а2 — с2 — малой полуосью
эллипса. Отношение с/а = е < 1 называ-
называется эксцентриситетом эллипса. Рис. 4.
Параметрические уравнения эллипса: х = a cost, y=bsint (пара-
(параметр t принимает любые действительные значения от 0 до 2тг).
Уравнение эллипса в полярных координатах: р = , где
1 + е cos ip
р = Ь2/а — фокальный параметр (половина хорды, проведенной через
фокус параллельно малой оси).
Площадь эллипса вычисляется по формуле S = nab.
Для приближенного определения периметра эллипса можно ис-
использовать формулу L » тг[1,5 (а + 6) — y/ab].
> Гиперболой называется множество точек плоскости, модуль раз-
разности расстояний от каждой из которых до двух данных точек Fx
и F2 есть постоянная величина,
равная 2а. Точки Fx и F2 на-
называются фокусами гиперболы,
расстояние p(Fx, F2) = 2с — фо-
фокусным расстоянием.
Каноническое уравнение ги-
гиперболы имеет вид
б2
Рис. 5.
где 6 = у/с2 — а2. Оно описыва-
описывает гиперболу в системе коорди-
координат, ось х которой проходит через фокусы Fx и F2) а начало находится
в середине отрезка FXF2 (рис. 5).
Параметр а называется действительной (или вещественной)
полуосью, параметр 6 — мнимой полуосью. Отношение с/а = е > 1
называется эксцентриситетом гиперболы.
тт Ь b
Прямые у= —х и у = х называются асимптотами гиперболы.
тт а а
При неограниченном продвижении в бесконечность расстояние от
каждой из них до гиперболы стремится к нулю.
16
Аналитическая геометрия на плоскости
Рис. 6.
Если а = 6, гипербола называется равнобочной. В системе коорди-
координат, оси которой совпадают с асимптотами равнобочной гиперболы,
и
она имеет уравнение вида у = — (к ф 0).
х
> Параболой называется множество точек плоскости, равноуда-
равноудаленных от данной точки F и данной прямой / (рис. 6).
Точка F называется фокусом, а прямая / — директрисой пара-
параболы.
Через фокус проведем прямую, перпендикулярную директрисе, и
обозначим точку пересечения этой прямой с директрисой буквой С.
Длину отрезка FC обозначим р. Примем построенную прямую за
ось х, а середину отрезка FC—за начало координат. В такой системе
парабола имеет уравнение
у2 = 2рХ)
называемое каноническим (рис. 6, а).
Если прямую, перпендикулярную директрисе, принять за ось у,
а начало координат также взять в середине отрезка FC, то в
получившейся системе координат уравнение параболы имеет вид
у = ах2, где а = —- (рис. 6, б).
2р
1.6. Приведение общего уравнения кривой
второго порядка к каноническому виду
^ Преобразование координат. Одна прямоугольная система ко-
координат хОу может преобразовываться в другую прямоугольную си-
систему координат xl0lyl при помощи параллельного переноса и по-
поворота. Координаты (х,у) точки М в системе хОу и координаты
2.1. Системы координат в пространстве 17
{х1}уг) той же точки М в системе х1О1у1 связаны следующими соот-
соотношениями:
1) при параллельном сдвиге осей и переносе начала координат О
в точку
2) при повороте осей на угол <р вокруг начала координат
х = x1cosy? — уг sirup, у = x1siny?-h У\ cos (р.
> Общее уравнение кривой второго порядка
Ах2 + Вху + Су2 + Dx + Еу + F = О
при переходе к подходящей новой системе координат упрощается и
приводится к одному из двух следующих видов:
Агх\ + Сгу1 + Fx = 0 или С2у\ + D2x2 + F2 = 0.
В зависимости от полученных значений А1)С1) FVC2, D2, F2 первому
из этих уравнений соответствует либо эллипс, либо гипербола, либо
пара пересекающихся прямых, либо точка, либо пустое множество,
а второму — либо парабола, либо пара параллельных прямых, либо
одна прямая, либо пустое множество.
Искомое преобразование производится в два этапа. На первом
этапе с помощью поворота освобождаемся от члена, содержащего
произведение координат. Угол поворота ср определяется формулой
¦-, если А ф С\ при А = С имеем <р = 45°. На втором
А — О
этапе при помощи параллельного переноса приходим к одному из двух
упомянутых уравнений.
2. Аналитическая геометрия
в пространстве
2.1. Системы координат в пространстве
> Декартова прямоугольная система координат в простран-
пространстве состоит из трех взаимно перпендикулярных числовых осей (на-
(называемых осями координат) с общим началом отсчета О и общей
единицей масштаба. Эти оси обозначаются через Ox, Oy, Oz (или
просто буквами х, у, z) и называются осями абсцисс, ординат и ап-
аппликат. Координаты (х, у, z) точки М определяются как координаты
проекций этой точки на оси х, у и z соответственно. Плоскость ху
(или хОу), содержащая оси х и у, и аналогично определяемые плос-
плоскости xz (xOz) и yz (yOz) называются координатными плоскостями.
18 Аналитическая геометрия в пространстве
Расстояние между точками А(хх, yXi zx) и В(х2, y2iz2) вычисляет-
вычисляется по формуле
р(А,В) = v4*2-*!)* + (%-ftJ+ (**-*!)».
Координаты точки М(х,у, z), делящей отрезок АВ в отношении
\АМ\ : \МВ\ = А?, определяются соотношениями
_
> Цилиндрические координаты. Положение точки M(x,y,z) в
пространстве можно определить ее аппликатой z и полярными коор-
координатами р = |0Р| и ^> = LxOP проекции Р этой точки на координат-
координатную плоскость хОу. Величины р, <р, z называются цилиндрическими
координатами точки М. Декартовы прямоугольные и цилиндриче-
цилиндрические координаты точки связаны соотношениями х = pcos tp, у = psin <p
(аппликаты в обеих системах одинаковы).
> Сферическая система координат определяет положение точ-
точки M{x)y)z) следующими тремя величинами: расстоянием р = ОМ,
углом в = LzOM и углом (р между плоскостями zOx и zOM. Ве-
Величины р, <р} в называются сферическими координатами точки М.
Прямоугольные и сферические координаты связаны соотношениями
х =¦ psinOcosip, у = psm9sin<p, z
2.2. Векторы
Вектором называется направленный отрезок АВ, у которого
точка А рассматривается как начало, а точка В — как конец. Вектор
обозначается либо указанием его начала и конца со стрелкой навер-
наверху АВ, либо одной буквой со стрелкой наверху а. Длина отрезка АВ
называется модулем вектора Ав и обозначается \АВ\ (модуль век-
вектора а обозначается \а\). Векторы, лежащие на одной прямой или на
параллельных прямых, называются коллинеарными.
Векторы называются равными, если они коллинеарны, имеют оди-
одинаковые модули и направления. Из этого определения следует, что
каковы бы ни были вектор а и точка Р, существует единственный
вектор PQ с началом Р, равный вектору а. Поэтому в геометрии век-
векторы рассматривают с точностью до их положения (т.е. не различая
векторов, получающихся друг из друга параллельным переносом). В
этом смысле векторы называют свободными.
Если поместить начало вектора а в начало координат, т.е. пред-
представить его направленным отрезком О А, то координаты (х, у, z)
точки А называются координатами вектора а. При этом пишут
2.3. Действия над векторами. Скалярное произведение 19
а = {х,у, z]. (Отметим, что ОА называют радиусом-вектором
точки А).
Если вектор а имеет начало B(xliy1)z1)i а конец С(х2,у2, z2), то
а = ВС = {я2 — #i > 2/2 — 2/i > Z2"~ *i} • Обозначим через г, jf и ? единичные
векторы, (орты) координатных осей х, у vl z соответственно (т.е.
1 = ОА}]=:ОЙ, к = ОС, где О — начало координат, АA,0,0), В@,1,0),
С@,0,1)). Тогда каждый вектор а = {ж,у,г} единственным образом
представляется в виде а = ж г + yj + г?.
Если а = {#, у, г}, то |3| = у/х2 + у2 + z2.
2.3. Действия над векторами.
Скалярное произведение
> Произведение вектора на число. Сумма и разность век-
векторов. Произведением вектора а на число к называется вектор ка,
коллинеарный вектору а, имеющий модуль |&||а| и направленный оди-
одинаково с а, если к > 0, и противоположно а при к < 0. Если а = {х) у) г},
то Ла = {Ara?, Art/, Arz}.
Суммой векторов а и 6 называется вектор а+6, который строится
следующим образом. Сначала с помощью параллельного переноса
вектора 6 совмещают его начало с концом вектора а. Сумма векторов
а + 6 — «замыкающий» вектор, начало которого совпадает с началом
вектора а, а конец — с концом вектора 6 [правило
треугольника, рис. 7).
Разность векторов а — Ь определяется как сумма
векторов аи -6. Если а = {я^У!,^}, 6 = {a?2»2/2»z2}»
то а ±6 = {я?! ± я?2| 2/1 =•= J/2i2i ±Z2}-
! 2 1 2i
Вектор, начало которого совпадает с его концом, называется
нулевым и обозначается 0. Очевидно, 0 = {0,0,0} и 5+ 0 = а для
любого вектора а.
> Скалярным произведением векторов а = {x1)yX)z1} и
^ = {#2> 2/2»^} называется число, равное произведению их модулей
на косинус угла ^> между ними: а -Ь= \S\\b\ cos (р.
В декартовых координатах: а • b = ххх2 + УхУ2 + zxz2>
Свойства скалярного произведения:
1. 5- 6 = b • а.
2. а- F +с) = а-6 + 3-е.
3. (Ага) • 6 = а • (&6) = ka -b, к — число.
4. а • а = \а\2 (эту величину обозначают также а2).
Скалярные произведения ортов:
г • г = j • j = ^ • Л = 1, i-jzzj-k=zk'i=:0.
20 Аналитическая геометрия в пространстве
> Угол между векторами. Угол меж^у вектором и осями
координат. Угол (р между векторами а и 6 определяется из соотно-
соотношения
COS Ш = чг.
|а||6|
Условие перпендикулярности двух векторов. Векторы а и 6 пер-
перпендикулярны тогда и только тогда, когда 5-6 = 0.
Условие параллельности (коллинеарности) двух векторов. Век-
Векторы а = {a?i,2/i,^i} и 6 = {^2j2/2»z2} параллельны тогда и только
—¦ СГ II Z
тогда, когда а = А?6 или — = — = — = к (х2 ф 0, у2 ф 0, z2 ^ 0).
% ^2 2/2 Z2
Проекция вектора 6 на направление вектора а, равная |6| cos <^>,
- а-Ь
вычисляется по формуле Пр^б = ,^. .
Пример. Определить угол А треугольника ABC с вершинами .АA,1,1),
ВB,-1,3), 0@,0,5).
Решение. Имеем А$ = {1,-2,2}, Хб = {-1,-1,4}. Тогда
1J + (-1J + 42 >/Г
Косинусы углов а, /?, 7 между вектором а и осями коор-
координат х) у) z соответственно называются направляющими ко-
косинусами вектора а. Отметим, что -r=T = {cosa,cos/?,cos7),
\а\
cos2 a + cos2 /3 + cos2 7 = 1-
2.4. Векторное и смешанное произведения
> Векторным произведением векторов а и 6 называется вектор
с = а х 6, определяемый условиями:
1) вектор с перпендикулярен векторам а и 6;
2) |с| = |a||6|sin^, где у? — угол между векто-
векторами а и 6;
3) а, 6, с*образуют правую тройку векторов,
~?* т.е. если начала векторов а, 6 и с поместить в
одну точку, то кратчайший поворот вектора а
Рис. 8. к Ъ наблюдается с конца вектора с происходящим
против часовой стрелки (рис. 8).
Векторные произведения ортов: % х j = A, j х ? = г, Л х ?= j.
2.4. Векторное и смешанное произведения
21
Если 3 = {xliyliz1}i b= {x2)y2)z2}, то
а х 6 =
*i Vi
х2 у2
= г
2/2
*1
— 7
xi
х2
Ч
Z2
+ к
*1
х2
2/1
2/2
^ • = {2/1*2 -
Свойства векторного произведения:
1. Зх 6= -Fх 3).
2. 3 х F + с) = 3 х 6 + 3 х с.
3. (*5) х 6 = Зх (kb) = ЛCх 6) (* — число).
4. Векторы 3 и 6 коллинеарны тогда и только тогда, когда 5x6 = 0.
5. Площадь 5 параллелограмма, построенного на векторах 3 и 6,
равна модулю их векторного произведения: S = |3 х 6|.
Пример. Найти площадь треугольника с вершинами АG,3,4), ?A,0,6),
СD,5,-2).
Решение. Имеем АВ = {-6, -3,2}, АС = {-3, 2, -6}. Вычислим
ч f т*
-6 -3 2
-3 2 -6
= ? A8 - 4) - j C6+6) + jf (-12 - 9) = 14Г- 42/- 2l? = {14, -42, -21}.
Поэтому S=±.\A&xa8\ = y\/l42 + (-42J + (-21J = \ - 49 = 24,5.
> Смешанным произведением векторов З, 6 и с называется число
36 с, равное скалярному произведению вектора 3 на вектор 6 х с, т.е.
abc= a • (Ь х с).
Свойства смешанного произведения:
1) При перестановке двух сомножителей смешанное произведение
меняет знак:
2) Векторы S, 6, с компланарны (т.е. параллельны одной плоскости)
тогда и только тогда, когда abc = 0.
3) Если векторы а, 6, с*не компланарны, то на них можно построить
параллелепипед; его объем V = \abc\. Объем пирамиды, построенной
на векторах а, 6 и с, составляет о^ну шестую часть объема указан-
указанного параллелепипеда: УПИ? = -j\abc\.
Если 3= {а1,а2»аз}» ^= {&1>&2>^з}> ^— {сис2»сз}» то их смешанное
произведение вычисляется как определитель третьего порядка:
а1
22
Аналитическая геометрия в пространстве
2.5. Плоскость в пространстве
> Общим уравнением плоскости называется линейное уравне-
уравнение
Ax + By + Cz + D = Q, A)
где А2 + В2 + С2ф0.
Любая плоскость в пространстве определяется уравнением ви-
вида A). Если D = 0, то плоскость проходит через начало координат;
если С = О (соответственно А = О или В = 0), то плоскость парал-
параллельна оси г (соответственно оси х или оси у). Уравнение Ах + D = 0
определяет плоскость, параллельную плоскости yOz.
Положение плоскости Р в пространстве полностью определяется
точкой М0(ж0,у0,20), лежащей на этой плоскости, и перпендикуляр-
перпендикулярным ей вектором N = {А, В, С} (который называется нормальным
вектором плоскости). При этом уравнение плоскости имеет вид
А(х - х0) + В{у - у0) + С(* - zQ) = 0. B)
Уравнение плоскости/проходящей через точку MQ(xQ)yQ)zQ) и
параллельной двум неколлинеарным векторам N1 = {A1)B1)C1} и
iV2 = {А2)В2)С2}) может быть записано в виде B), где А) В) С —
координаты вектора N = Nx x N2.
Уравнение плоскости, проходящей через три данные точки
Mi{xi*V\>zi)> -^2(^2» 2/2» ^2)» М3(ж3,2/3, г3), не лежащие на одной пря-
прямой, имеет вид А(х - хг) + В(у - уг) +С(г — 2гх) = 0, где А, В, С —
координаты вектора N = МХМ2 х МгМ3. Это уравнение можно за-
записать с помощью определителя:
2/-2/!
Уд -Ух
= 0.
Пример. Составить уравнение плоскости Р, проходящей через точку
МоB, -1,1) и перпендикулярной двум плоскостям Pj : За? + 2у — -г + 4 = 0 и
Р
о(
Р2:
Решение. Нормальные векторы ^ = {3, 2, — 1} и $2 = {1,1,1} к плоскостям
и Р2 параллельны плоскости Р. Вычислим
= #! X #2 =
1 J Л
3 2-1
= 3i-4jT+lib.
1 1 1
Плоскость Р описывается уравнением 3(х — 2) — 4(у + 1) + (я — 1) = 0 или
Расстояние d от точки Мо(#о, у0, z0) до плоскости Ах + By +
?z + D = 0 вычисляется по формуле
^_ \Ах0 + Ву0 + Cz0 + D\
2.6. Прямая в пространстве 23
р- Взаимное расположение двух плоскостей. Угол <р между
двумя плоскостями
Ахх + Вгу + Cxz + Dx = 0 (плоскость PJ,
А2х + В2у + C2z + ?J = О (плоскость Р2)
равен углу между их нормальными векторами Nx и N2 и определяется
соотношением
#, • iV2 AiAo + BiBn + CiC2
cos <p = —=r—^- = —1 =
l^ 11^1
+ bi + c\
Условие параллельности плоскостей: Рг \\ Р2 тогда и только
тогда, когда коллинеарны нормальные векторы Nx и N2, т.е.
AJA2 = BJB2 = CJC2 (если А2 фО, В2ф 0, С2 ф 0).
Условие перпендикулярности плоскостей: Рх JL Р2 тогда и только
тогда, когда Nx JL N2) т.е.
A1A2 + B1B2 + C1C2 = Q.
Уравнение пучка плоскостей, проходящих через линию пересече-
пересечения плоскостей Рх и Р2) имеет вид
р{Агх + Вгу + Cxz + Dx) + q{A2x + В2у + C2z + D2) = 0
(при любых конкретных значениях параметров р и q это уравнение
определяет плоскость, проходящую через линию пересечения плоско-
плоскостей Рг и Р2).
2.6. Прямая в пространстве
Каждая прямая в пространстве может быть задана системой двух
линейных уравнений
Х2Г + Z?! = 0,
А2х
(эти уравнения определяют две плоскости, пересечением которых и
служит данная прямая).
Обратно: любая совместная система уравнений вида C), левые
части которых не пропорциональны, задает некоторую прямую.
Положение прямой L полностью определяется какой-нибудь ее
точкой M0(x0)yQ)zQ) и направляющим вектором / = {т)п)р}) парал-
параллельным прямой. При этом прямая задается следующими параметри-
параметрическими уравнениями:
24 Аналитическая геометрия в пространстве
где параметр t принимает любые действительные значения.
Если все координаты направляющего вектора не равны нулю, пря-
прямая может быть также задана следующими канонЬиескими уравнени-
уравнениями:
т п р
Углы а, /?, 7> образуемые прямой L соответственно с осями
координат Ox, Oy, Oz, находятся по формулам
т п р
cosa = —= , ч . ч , cos^=-т== . о , о > cos7=—г=
Прямая, проходящая через две данные точки M1(x1)y1}z1) и
{Х2>У2J2)> представляется уравнениями
х-хх
1 7" =
17 7,7Г 1Г (*2 г i> % фУи*2Ф zi)'
х2 ~ xi 2/2 - 2/i *2 ~ zi
Если прямая L задана уравнениями C), т.е. как линия пересечения
плоскостей Рх и Р2 с нормальными векторами Nx = {Ах, 5Х, Сх} и
/i72 = {А2, ^2» Сг}» то ее направляющий вектор / может быть найден
как векторное.произведение векторов Nx и N2: I = Nx x N2- Точка
Мо ? L находится как одно из решений системы C).
Пример. Написать канонические уравнения прямой, заданной уравнениями
х + 2у + 3z - 13 = 0, За: + у + 4г - 14 = 0.
Решение. Имеем Йх = {1,2,3}, Й2 = {3,1,4}, Г = #х х #2 = {5,5,-5}.
Подставив в уравнения прямой значение z = 0, получим систему: а; + 2у — 13 = 0,
За; + У — 14 = 0, из которой найдем х = 3, у = 5, М0C,5,0). Таким образом,
г-З у-5 я-0
канонические уравнения прямой примут вид = = или
5 5 —5
57 — 3=2/ — 5 = — Z.
Угол <р между прямыми Ьх и ?2 равен углу между щ направляю-
направляющими векторами 1Х — {т1) п1)р1} и /2 = {ш2, п2,р2} и вычисляется по
формуле
2.7. Прямая и плоскость а пространстве
Угол ^> между прямой L с направляющим вектором / = {т, п,р} и
плоскостью Р : Л# + By + Cz + -D = 0 определяется из соотношения
\Ат + Вп + Ср\
2.8. Поверхности второго порядка 25
Условие параллельности прямой и плоскости: L || Р тогда и
только тогда, когда векторы / и N перпендикулярны, т.е.
Am + Вп + Ср = 0.
Условие перпендикулярности прямой и плоскости: L JL Р тогда
и только тогда, когда векторы N = {А> 5, С} и / параллельны, т.е.
— = — = — (если т ф 0, п ф 0, р ф 0).
т п р
Канонические уравнения прямой L, перпендикулярной плоскости
Р : Ах + By + Cz + D — 0 и проходящей через точку М0(х0, у0, г0),
имеют вид
= = {Аф0,Вф0,Сф0).
Уравнение плоскости Р, проходящей через точку M0(x0,y0,z0) и
перпендикулярной прямой L с направляющим вектором / = {т, п,р},
записывается так:
т(х - аг0) + п{у - у0) 4- p(z - z0) = 0.
Для нахождения координат точки пересечения прямой и плоско-
плоскости необходимо решить систему уравнений, состоящую из уравнений
прямой и уравнения плоскости.
Пример. Найти проекцию точки М0C,1,-1) на плоскость Р, которая задана
уравнением х + 2у + 3z — 30 = 0.
Решение. Искомая проекция Q(r, у, z) есть точка пересечения плоскости Р и
прямой L, проходящей через точку Мо и перпендикулярной Р. Параметрические
уравнения прямой L: а: = 3 + *, 2/ = 1 + 2<, z = — 1 + 3t подставим в уравнение
плоскости Р. Получим 3 -f t + 2 + 4t - 3 + 9t - 30 = 0, откуда t = 2, х = 5, у = 5,
л = 5, 0E,5,5).
2.8. Поверхности второго порядка
> Поверхностями второго порядка называются такие множе-
множества точек в пространстве, координаты которых удовлетворяют
уравнению вида
Ах2 + By2 + Cz2 + Dxy + Eyz + Fzx + Gx + Hy + Kz + L = 0. D)
Например, уравнение
x2 + у2 + z2 = R2
определяет сферу радиуса R с центром в начале координат. Объем
сферы: V = 4-тгД3.
26
Аналитическая геометрия в пространстве
ТАБЛИЦА 1
Канонические уравнения поверхностей второго порядка
1
2
3
4
5
6
7
8
9
10
11
12
Каноническое уравнение
? + ?-?-!
(Р, 9 > 0)
(р, g > о)
«г2 „2
у2 = 2рх
х2=0
Название поверхности
Эллипсоид
Однополостный
гиперболоид
Двуполостный
гиперболоид
Конус второго
порядка
Эллиптический
параболоид
Гиперболический
параболоид
Эллиптический
цилиндр
Гиперболический
цилиндр
Параболический
цилиндр
Пара пересекающихся
плоскостей
Пара параллельных
плоскостей
Пара совпадающих
плоскостей
Рисунок
Рис. 9, а
Рис. 9, 6
Рис. 9, в
Рис. 9, г
Рис. 9, д
Рис. 9, е
Рис. 9, ж
Рис. 9, з
Рис. 9, и
Рис. 9, к
—
—
> Канонические уравнения поверхностей второго порядка.
При помощи поворотов и параллельного переноса осей координат
всякое уравнение вида D) может быть преобразовано к простому
каноническому виду. Основные канонические уравнения и названия
соответствующих поверхностей даны в табл. 1, а их схематические
изображения приведены на рис. 9. Ниже описаны наиболее важные
свойства некоторых поверхностей второго порядка.
Эллипсоид (рис. 9, а). Сечением эллипсоида любой плоскостью
является эллипс (в частном случае круг). Координаты точек эллипсо-
эллипсоида удовлетворяют неравенствам —а^х ^ а, — b ^ у ^ 6, —c^z^c.
Объем эллипсоида: V = -jirabc.
В частном случае а = Ь имеем эллипсоид вращения, получающийся
при вращении эллипса (х/аJ + (z/cJ = 1, лежащего в плоскости xOz)
2.8. Поверхности второго порядка
27
*)
ф
у
Рис. 9.
28 Линейная алгебра
вокруг оси z (при а>с эллипсоид вращения называется сплюснутым,
а при а < с — вытянутым).
Гиперболоиды (рис. 9, б, в). Для обоих гиперболоидов сечения,
параллельные оси z, — гиперболы (для однополостного гиперболоида
может быть пара пересекающихся прямых); сечения, параллельные
плоскости хОу, — эллипсы.
Двуполостный гиперболоид состоит из двух частей, точки кото-
которых расположены соответственно при z ^ —с и z ^ с.
Конус (рис. 9, г) имеет вершину в начале координат. Поверхность
конуса состоит из прямых линий (эти линии называются образующи-
образующими), проходящих через его вершину и точки эллипса с полуосями а
и Ь, плоскость которого перпендикулярна оси z и находится на рас-
расстоянии с от начала координат.
Конус является асимптотическим для обоих гиперболоидов
(х/аJ + (у/ЬJ - (z/cJ = ±1, т.е. каждая из его образующих при
удалении в бесконечность неограниченно приближается к обоим ги-
гиперболоидам.
Эллиптический параболоид (рис. 9, д). Сечения, параллельные
оси z, —параболы; сечения, параллельные плоскости хОу, — эллипсы.
Точки эллиптического параболоида расположены в области z ^ 0.
В частном случае p = q имеем параболоид вращения, порождаемый
вращением параболы вокруг оси z.
Гиперболический параболоид (рис. 9, е). Сечения, параллельные
плоскостям yOz и xOz, —.параболы; сечения, параллельные плоскости
хОу, — гиперболы (и пара пересекающихся прямых).
Цилиндры (рис. 9, ж, з, и). Поверхности цилиндров состоят из
прямых линий, параллельных оси z. Сечениями (параллельными оси z)
эллиптического, гиперболического и параболического цилиндров со-
соответственно являются эллипсы, гиперболы и параболы.
3. Линейная алгебра
3.1. Определители
> Определители второго и третьего порядков. Определите-
Определителем второго порядка с элементами ап, а12, а2ц а22 называется чи-
число Д, которое обозначается символом
а
формуле
11 2
21 а22
и вычисляется по
Д_ аП а12
а21 а22
= а11а22 -
3.1. Определители
29
Определитель третьего порядка —это число
Д =
'12 U13
322 a23
2o9 (Zoo
oz oo
= а11а22аЗЗ + а12а23а31 + а13а21а32 ~ а13а22а31 "" а12а21аЗЗ ~ а11а23а32«
Минором M{j элемента а^ определителя Д называется опреде-
определитель второго порядка, который получается, если в Д вычеркнуть
строку и столбец, содержащие данный элемент. Алгебраическим до-
дополнением элемента а^ называется число А^ = (—1)*+>7М^.
> Свойства определителей третьего порядка.
1. Разложение определителя по строке (столбцу). Определитель
равен сумме произведений элементов любой его строки или столбца
на их алгебраические дополнения:
Д = аа
ai2Ai2
ai3Ai3) A = а
a2jA2j
a3jA3j.
В частности, разлагая определитель по первой строке (г = 1),
получим
CZoo CZqo
О Л Од
~а12
«21 а23
а31 азз
' 13
«21 «22
«31 «32
— ип
2. Определитель не изменится, если его строки заменить столб-
столбцами, а столбцы — соответствующими строками.
3. Общий множитель элементов какой-нибудь строки (или столб-
столбца) может быть вынесен за знак определителя.
4. Если элементы одной строки (столбца) определителя соответ-
соответственно равны элементам другой строки (столбца), то определитель
равен нулю.
5. При перестановке двух строк (столбцов) определитель меняет
знак.
6. Определитель не изменится, если к элементам одной стро-
строки (столбца) прибавить соответствующие элементы другой строки
(столбца), умноженные на одно и то же число.
Вычисление определителя удобно проводить, используя свойства
1,3 и 6.
-13 25 17
Пример 1. Вычислить определитель Д = 26 —34 —26 .
36 -33 -24
Решение. Вынесем за знак определителя общий множитель 2 элементов
второй строки, после чего прибавим к первой строке вторую, а к третьей г—
вторую, умноженную на —2. В результате имеем
Д = 2
-13
13
36
25
-17
-33
17
-24
= 2
0 8 4
13 -17 -13
10 1 2
30
Линейная алгебра
Прибавляя ко второму столбцу последнего определителя третий столбец, умно-
умноженный на — 2, и записывая после этого разложение по первой строке, получим
А = 2
0 0 4
13 9 -13
10 -3 2
= 8
13 9
10 -3
= 8(-39-90) = -1032.
> Определитель порядка п—это число, которое задается ква-
квадратной таблицей чисел, имеющей п строк и п столбцов:
Д =
hi
'12
222
hn
где а^ — элементы определителя (г, j = 1,2,..., п).
Теория определителей n-го порядка строится аналогично теории
определителей третьего порядка. В частности, определитель равен
сумме произведений элементов какого-нибудь столбца (строки) на их
алгебраические дополнения:
ainAn
a2jA2j
A)
Алгебраические дополнения определяются формулой А^=(—1^
где M{j —минор элемента а^ (определитель (п — 1)-го порядка, по-
получаемый из Д путем вычеркивания строки и столбца, содержащих
данный элемент). Из формул A) следует, что вычисление определи-
определителя порядка п сводится к вычислению определителей порядка п — 1.
Все изложенные выше свойства определителей третьего поряд-
порядка справедливы и для определителей произвольного порядка.
Пример 2. Вычислить определитель А =
-2 5-1 3
1 -9 13 7
3-15 -5
2 18 -7 -10
Решение. Прибавляя к первой строке удвоенную вторую, к третьей —
вторую, умноженную на —3, к четвертой — вторую, умноженную на —2, и
записывая затем разложение по первому столбцу, получим
0 -13 25 17
1 -9 13 7
0 26 -34 -26
0 36 -33 -24
-13 25 17
26 -34 -26
36 -33 -24
Последний определитель вычислен выше (см. пример 1), поэтому искомый опре-
определитель четвертого порядка равен 1032.
3.2. Матрицы
31
3.2. Матрицы
^ Матрицей размера т х п называется прямоугольная таблица
чисел, состоящая из m строк и п столбцов:
А =
322
Ъп
2ml am2 •'• ат
Числа a{j называются элементами матрицы. Если т = п, матрица А
называется квадратной^ а число п — ее порядком.
Для каждой квадратной матрицы А можно вычислить ее опреде-
определитель, обозначаемый det А (или \А\).
> Сумма матриц. Произведение матрицы на число. Суммой
двух матриц одинакового размера называется матрица, определяемая
равенством
6п 610 ... &1
*>\2
322
Л1п
Ъп
6
22
и1п
b2n I _
Лт1
ит1
ит2
*21
1
Ь21
'22
2
622
Л1п
Ьп
+ 6
Jln
'2п
ml Т «ml ит2 Т ит2 • • • итп Т "т
Произведением матрицы А на число а называется матрица
аА =
оса
аа
аа
аа
аа
аа
In
2п
> Произведение матриц. Произведение матрицы А на матрицу
В определено в том случае, когда число столбцов матрицы А равно
числу строк матрицы В. В результате умножения получается матри-
матрица С = АВ) у которой столько же строк, сколько их в матрице А) и
столько же столбцов, сколько их в матрице В. Элемент c{j матрицы-
произведения, стоящий в г-й строке и j-м столбце, равен сумме про-
произведений соответственных элементов г-й строки матрицы А и j-ro
столбца матрицы В:
АВ =
*12
••• аы\
аП
... а
in
32 Линейная алгебра
/сп ... су ... clk\
"и ¦¦¦ cij ¦¦¦ cik
\ cml ... cmj ... стк /
где ctj = апЪц + ai2b2j + ... + ain6nj..
Важно отметить, что в общем случае АВ ф ВА (т.е. матрицы
нельзя переставлять).
Определитель произведения двух квадратных матриц одина-
одинакового порядка равен произведению определителей этих матриц:
det (AB) = det A-det В.
> Миноры и ранг матрицы. Выделим в матрице к произволь-
произвольных строк и к произвольных столбцов. Определитель к-vo порядка,
составленный из элементов, расположенных на пересечении выделен-
выделенных строк и столбцов, называется минором к-то порядка этой матри-
матрицы.
Рангом матрицы А называется наибольший порядок миноров
этой матрицы, отличных от нуля. Ранг матрицы А обозначается
rang (Л). Если все элементы матрицы равны нулю, то ранг этой ма-
матрицы принимается равным нулю. Ранг матрицы равен рангу систе-
системы векторов-столбцов и рангу системы векторов-строк матрицы А
(см. разд. 3.4).
Ранг матрицы не меняется при следующих элементарных преобра-
преобразованиях: замене строк столбцами, а столбцов — соответствующи-
соответствующими строками; перестановке строк (столбцов) матрицы; умножении
какой-либо строки (столбца) на число, отличное от нуля; вычеркива-
вычеркивании строки (столбца), все элементы которой равны нулю; прибавле-
прибавлении к элементам одной строки (столбца) соответствующих элементов
другой строки (столбца).
/1 2 3 б>
Пример. Определить ранг матрицы А = [ 2 3 1 6
\3 1 2 6,
Решение. Вычтем из 4-го столбца сумму первых трех столбцов, а затем
вычеркнем полученный 4-й столбец, все элементы которого равны нулю. Получим
/1 2 3V
2 3 1,
\3 1 2/
матрицу Ах = ( 2 3 II, имеющую тот же ранг, что и матрица А. Так как
\3 1 2/
\АХ \ = -18 ф 0, то rang(Ax) = 3. Следовательно, и rang (А) = 3.
> Единичная и обратная матрицы. Квадратная матрица вида
A 0 ... О
01 ::: °
О 0 ... 1
называется единичной. Справедливы равенства АЕ = А и ЕС = С
(если произведения матриц в левых частях определены).
3.3. Системы линейных уравнений 33
Квадратная матрица А называется невырожденной, если det А ф О,
и обратимой, если можно подобрать такую матрицу В, что АВ —
— В А — Е. Матрица В называется обратной матрицей к матрице А.
Квадратная матрица обратима тогда и только тогда, когда она
невырожденная. Обратимая матрица А имеет только одну обратную
матрицу, которая обозначается А~1 и вычисляется по формуле
^21 • ' • Ail
1 / А /
А'1 =
1-1 _ 1 I ^12 ^22
det A
<А1п А2п
где А- — алгебраическое дополнение элемента а- определителя
матрицы А (см. разд. ЗЛ).
3.3. Системы линейных уравнении
> Система линейных уравнений имеет вид
а11х1 + а12х2 + •-- + а1пхп =
а21Х1 + а22Х2 + ^ а2пХп — ^2>
11х1 + а12х2 + •-- + а1пхп
= Ь2
ат1хг + ат2х2 + • • • + атпхп = 6т,
где ап, а12, ..., атп — коэффициенты; 61? 62, ..., Ьт — свободные
члены; х1} х2, •.., хп —неизвестные величины.
Решением этой системы называется совокупность п чисел
(х15х2,.. .,хп), которые, будучи подставлены вместо неизвестных в
уравнения, обращают эти уравнения в тождества. Система уравне-
уравнений называется совместной, если она имеет хотя бы одно решение.
Если же система не имеет ни одного решения, то она называется не-
несовместной.
Совместная система называется определенной, если она имеет
только одно решение, и неопределенной, если она имеет более одного
решения.
Матрицы
п а12 ... а1п \ / ап а12 ... а1п Ъх
= I а21 а22 • • • а2п I А = I а21 а22 • • • а2п Ь2
2т1 ат2 ••• атп/ V ат1 ат2 ••• атп Ьт >
называются соответственно матрицей и расширенной матрицей си-
системы B).
Теорема Кронекера —Капелли. Для совместности системы B)
необходимо и достаточно, чтобы ранг матрицы этой системы был
равен рангу расширенной матрицы: rang (A) = iaing(A1).
2 А. Д. Полянин, В. Д. Полянин и др.
34 Линейная алгебра
> Правило Крамера. Если ранг матрицы совместной системы
равен числу ее неизвестных, то система является определенной. Если
число неизвестных системы B) совпадает с числом уравнений (т = п)
и матрица системы невырожденная (det А ф 0), то система имеет
единственное решение, которое находится по правилу Крамера:
х -
Х1 ~
В этих формулах А = det А — определитель системы, а Ак — опреде-
определитель, полученный из определителя системы заменой к-го столбца
столбцом свободных членов (А: = 1, 2, ..., п).
> Матричное решение системы. Система линейных уравне-
уравнений B) может быть записана в матричной форме
АХ = Я, C)
где А — матрица системы; X — матрица-столбец неизвестных; В —
матрица-столбец свободных членов. Если матрица А квадратная и
невырожденная, то решение системы C) может быть записано в
матричной форме: X — А~ХВ.
> Равносильные системы уравнений. Две системы линейных
уравнений называются равносильными, если множества их решений
совпадают. Нахождение решений системы линейных уравнений осно-
основано на переходе к равносильной системе, которая проще исходной.
Укажем простейшие операции, которые приводят к равносильной си-
системе:
1) перемена местами двух уравнений в системе;
2) умножение какого-либо уравнения системы на действительное
число (отличное от нуля);
3) прибавление к одному уравнению другого уравнения, умножен-
умноженного на произвольное число.
Неизвестное xi называется разрешенным или базисным, если
какое-нибудь уравнение системы содержит его с коэффициентом 1,
а во все остальные уравнения xi не входит.
Если каждое уравнение системы содержит разрешенное неизвест-
неизвестное, то такая система называется разрешенной. Ее неизвестные, не
являющиеся базисными, называются свободными.
Для отыскания всех решений совместной системы линейных урав-
уравнений достаточно найти равносильную ей разрешенную систему.
Если все неизвестные окажутся базисными, то разрешенная систе-
система дает значения этих неизвестных, составляющие единственное ре-
решение исходной системы. В противном случае выражают базисные
неизвестные через свободные.
3.3. Системы линейных уравнений
35
^ Метод Жор дана — Гаусса. Запишем систему линейных урав-
уравнений B) в виде таблицы
*1
а11
«п
«ml
xs
aU
ar,
ams
...
...
«m
«rn
«mn
К
Жордановым преобразованием системы с разрешающим элемен-
элементом ars ф 0 называется следующая последовательность действий:
1) умножение г-й строки таблицы на число ;
2) прибавление к первой строке таблицы ее г-й строки (получен-
(полученной после первого действия), умноженной на — al5;
3) прибавление ко второй строке г-й строки, умноженной на — а25,
и т.д.
После этих преобразований неизвестное хг станет разрешенным,
все коэффициенты s-ro столбца будут равны нулю, кроме ars = 1.
Проводя последовательно жордановы преобразования с разреша-
разрешающими элементами, взятыми в различных строках, получим разре-
разрешенную систему, равносильную исходной.
Если в результате преобразований все коэффициенты при неиз-
неизвестных в какой-нибудь строке окажутся равными нулю, а свободный
член этой строки не будет равным нулю, то данная система уравнений
несовместна. Если же получится строка, состоящая из одних нулей,
то она вычеркивается из таблицы.
Пример 1. Решить систему уравнений
Г 2а;! -Зх2 + Ьх3 = 1,
} хх + 2х2 - Зх3 = -7,
и*! +5*3= 4.
Решение. Запишем эту систему в виде таблицы и проведем ее преобразова-
преобразование к разрешенному виду в шесть шагов:
Х1
2
|Т|
2
х\
0
1
0
х\
0
1
0
х2
-3
2
0
х2
-7
2
ш
х2
0
0
1
хз
5
-3
5
хз
11
-3
0
х3
1
0
0
1
-7
4
15
-7
1
2
-3
1
xl
0
1
0
Х1
0
1
0
х2
-7
2
-4
х2
0
0
1
11
-3
11
*з
11
-3
0
15
-7
18
22
-9
1
хг
0
1
0
х2
-7
2
3
*з
11
-3
0
15
-7
3
Х1
0
1
0
х2
0
0
1
*з
Ш
-3
0
2
-9
1
36 Линейная алгебра
В приведенных таблицах обведены разрешающие элементы. На первом шаге
было произведено вычитание из первой и третьей строк удвоенной второй строки;
на втором шаге — вычитание из третьей строки первой; на третьем шаге —
деление третьей строки на 3; на четвертом шаге к первой строке была прибавлена
третья, умноженная на 7, а ко второй — третья, умноженная на —2; на пятом
шаге первая строка была разделена на 11; на шестом шаге ко второй строке была
прибавлена первая, умноженная на 3. В результате исходная система принимает
следующий разрешенный вид:
{О • хх + О • х2 + 1 • х3 = 2,
1 • хх + О • х2 + О • х3 = -3,
В итоге имеем решение хх = —3, х2 = 1, х3 = 2.
Пример 2. Решить систему уравнений
Г 2хх + 7х2 + Зх3 + хА = 6,
< За^ + Ъх2 -\- 2х3 -\- 2х4 = 4,
^ 9хх -\- 4х2 -\- х3 -\- 7х4 = 2.
Решение. С помощью жордановых преобразований эта система приводится
к разрешенной:
Г - 11а;2 -Ъх3+х4= - 10,
\хх + 9а;2 + 4а;з = 8.
Следовательно, совокупность всех решений исходной системы задается формула-
формулами хх = 8 — 9х2 — 4х31 х4 = —10 + 11^2 "Ь ^^з» гДе Х1 и хз принимают любые
действительные значения.
3.4. Системы n-мерных векторов.
Собственные значения
и собственные векторы матрицы
> Некоторые определения и формулы. Последовательность
чисел х1) х2) ..., хп называется п-мерным вектором X. Обозначение:
X = {х1, х2,..., хп}. Числа хг, х2, ..., хп называются координатами
вектора. Число координат называется размерностью вектора. Пусть
^ = {У\) %' • • •) Уп}- Следующие формулы задают операции сложения
гс-мерных векторов и умножения гс-мерного вектора на число:
•\г | \г Г , . ill \Г Г I I II
i •*¦ — \ 1 *^ У\ j 2 "^ yo j • • * j n *^ Уп J ' "^ — 11) 2 ) ***) n f'
Скалярным произведением векторов X и Y называется число
X -Y = хгуг + х2у2 + \-хпуп.
Два вектора называются ортогональными^ если их скалярное
произведение равно нулю. Модулем вектора X называется число
\х\ =
Свойства модуля вектора:
1) |Х| ^ О (|Х| = 0 тогда и только тогда, когда X — 0),
2) \кХ\ = \к\ \Х\,к — число,
3) \Х + Y\ ^ \Х\ + \Y\ — неравенство треугольника.
3.4. Системы п-мерных векторов. Собственные векторы матрицы 37
^ Системы n-мерных векторов. Система векторов называет-
называется ортонормированной, если векторы этой системы попарно ортого-
ортогональны и имеют модули, равные единице.
Вектор k1A1+k2A2+:' -+ктАт называется линейной комбинацией
векторов А1у А2, ..., Ат с коэффициентами Arl5 к2) ..., km.
Вектор В разлагается по системе векторов А1) А2) ..., Ат)
если выполняется равенство В — к1А1 + к2А2 + • • • + ктАт. Числа
к1у к2, ..., кт называются коэффициентами разложения.
Векторная форма записи системы линейных уравнений B) имеет
вид
где Аг= {ап, а21,..., ат1} — m-мерный вектор, координаты которого
равны коэффициентам при неизвестном хх\ А2 — {а12) а22)..., агп2] —
вектор коэффициентов при х2 и т.д.; В = {61,62,.. ,Ьт}—вектор
свободных членов.
Чтобы найти разложение вектора В по системе векторов
А1у А2) ..., Ат, достаточно иметь какое-нибудь решение системы
уравнений B).
Система векторов Ах, А2, ..., Ап называется линейно зависимой,
если существуют такие числа Аг1? к2) ..., кп) не все равные нулю, что
t1i41 + t2i42 + -.. + tni4n = 0, D)
где 0 = {0, 0,..., 0} — нулевой вектор.
Если равенство D) возможно лишь, когда все коэффициенты
к1) к2\ ..., кп равны нулю, то система векторов называется линейно
независимой.
Линейно независимая часть В1) В2) ..., ВТ системы векторов
А1у А2) ..., Ап называется базисом этой системы, если каждый
вектор системы А1) А2) ..., Ап разлагается по векторам В1у В2)
...,вг.
Каждую линейно независимую часть системы векторов можно
дополнить до базиса этой системы. Все базисы данной системы
состоят из одного и того же числа векторов.
Рангом системы векторов называется число векторов в любом
ее базисе.
> Собственные значения и собственные векторы матрицы.
Число Л называется собственным значением квадратной матрицы А
порядка п, если можно найти такой n-мерный ненулевой вектор X,
что АХ — XX. Вектор X называется собственным вектором матри-
матрицы А, отвечающим собственному значению Л.
38Основные понятия математического анализа
Собственные значения являются
det{A-XE) =
«11 ~~ ^ «
«21 «22
корнями
12
-Л ...
и О • • •
уравнения
«In
«2п
а„„ — X
=
= апЛп + а^А"-1 + • • • + аг\ + а0 = О,
называемого характеристическим уравнением матрицы А.
Множество всех собственных векторов матрицы А, отвечающих
ее собственному значению А, совпадает с множеством всех ненулевых
решений системы линейных уравнений (А — ХЕ)Х — 0.
4. Основные понятия
математического анализа
4.1. Числовые множества. Понятие функции
> Числовая ось. Интервалы. Числовой осью называется прямая,
на которой выбрано направление, указано начало отсчета О и едини-
единица масштаба. Существует взаимно однозначное соответствие между
множеством всех действительных чисел R и множеством всех точек
числовой оси, при котором каждое действительное число х изобра-
изображается точкой, отстоящей от О на расстояние \х\ вправо, если х > 0,
и влево, если х < 0.
Среди числовых множеств, т.е. множеств действительных чисел
(или множеств точек числовой оси), выделяют следующие.
1) Множества вида (а, 6), (—оо, 6), (а, Н-оо), (—оо, Н-оо), состоящие
из всех таких чисел х Е R, для которых соответственно а < ж < 6, х<Ь)
х > а, х — любое число. Такие множества называются (открытыми)
интервалами.
2) Множества вида [а, 6], состоящие из тех х Е R, для которых
а ^ х ^ b — замкнутые интервалы или отрезки.
3) Множества вида (а, 6], [а, 6), (—оо,6], [а,+оо), состоящие из
таких чисел х, что а < х <Z.b, а ^. х < b, ж^б, х ^ а — полуоткрытые
интервалы.
Окрестностью точки х0 Е R называется любой открытый ин-
интервал (а, 6), содержащий точку х0. Окрестностью «точек» Н-оо, —оо
и оо называются соответственно множества вида F, Н-оо), (—оо,с)
и (-оо, -a) U (а, +оо) (здесь а ^ 0).
> Способы задания функции. Пусть D — некоторое множество
действительных чисел. Если каждому числу х Е D поставлено в соот-
соответствие некоторое число у = /(ж), то говорят, что на множестве D
4.2. Элементарные функции и их графики 39
определена функция /. Множество D называется областью опреде-
определения, а множество Е всех элементов вида f(x) — множеством зна-
значений функции /. Для функционального соответствия приняты обо-
обозначения у — f{x)) f : D —> Е, f : х »-> у.
Функцию можно задавать многими способами (табличным, гра-
графическим и др.). Наиболее распространенным и удобным является
аналитический способ, т.е. задание функции при помощи форму-
формулы (или нескольких формул), зависящей от аргумента х, например,
у = sin х +1. Неявное задание функции состоит в задании уравнения
F{x)y) — 0, из которого при произвольном фиксированном значении
аргумента х вычисляется значение функции у. Параметрическое за-
задание функции состоит в задании аргумента х и значения у в виде
формул, зависящих от вспомогательной переменной t (параметра):
> Монотонные функции. Функция f(x) называется возрастаю-
возрастающей (неубывающей) на множестве D С R, если для любых xly x2 Е D
при хг > х2 имеем f(xl) > f{x2) (/(а^) ^ Я^))- Функция f(x) на-
называется убывающей (невозрастающей) на множестве D, если для
любых х1у х2 Е D при х1 > х2 справедливо неравенство f(xl) < f{x2)
{f{xi) ^ fix2))- Убывающие и возрастающие функции называются
монотонными.
> Сложная и обратная функции. Пусть заданы функция и — и{х),
х G D, с множеством значений Е и функция у — f{u)) и Е Е. Тогда
функция у = /(?/(#)), х Е D, называется сложной функцией или
суперпозицией функций / и и.
Пусть на множестве х Е D определена функция у — /(ж), где
уЕЕ. Обратной функцией по отношению к у = f(x) называется такая
функция х — д{у), которая определена на множестве Е и каждому
у Е Е ставит в соответствие такое х Е D, что f(x) = у. Обратную
функцию часто обозначают д = f~l.
Для монотонных функций обратная функция всегда определена
и справедливо тождество: g(f(x)) = x. Для того чтобы получить
обратную функцию д(у), следует из равенства у — f_(x) выразить х
через у.
4.2. Элементарные функции и их графики
Основные элементарные функции: степенная, показательная, ло-
логарифмическая, тригонометрические и обратные тригонометриче-
тригонометрические функции. Ниже перечислены основные свойства и приведены
графики основных элементарных функций.
> Степенная функция: у = ж", а — любое.
Случай 1: а — 2п, где п — натуральное число (п — 1, 2, ...).
40
Основные понятия математического анализа
Рис. 10.
Область определения: х— любое. Область изменения: у ^ 0. Функция
четная, непериодическая, неограниченная. Пересекает ось Оу и каса-
касается оси Ох в начале координат: х — 0, у = 0. На интервале (—оо;0)
убывает, на интервале @; -foo) возрастает. Имеет минимум у — 0 при
х = 0. График функции у — х2 (парабола) представлен на рис. 10 слева.
Случай 2: а = 2п + 1, где п — натуральное число. Область
определения: х — любое. Область изменения: у — любое. Функция
нечетная, непериодическая, неограниченная. Пересекает оси Ох и Оу
в начале координат: х = 0, у = 0. Возрастает на всей числовой прямой.
Экстремумов не имеет. График функции у = х3 (кубическая парабола)
представлен на рис. 10 слева.
Случай 3: а .= —2п, где п—натуральное число. Область опре-
определения: х ф 0. Область изменения: у > 0. Функция четная, непери-
непериодическая, неограниченная. Пересечений с осями координат не име-
имеет. На интервале (—оо;0) возрастает, на интервале @;-foo) убывает.
Экстремумов не имеет. График функции у = х~2 приведен на рис. 10
справа.
Случай 4- & — —2n -f 1, где п — натуральное число. Область
определения: хфО. Область изменения: у — любое. Функция нечетная,
непериодическая, неограниченная. Не имеет пересечений с осями
координат. Убывает на всей числовой оси. Экстремумов не имеет.
График функции у = х~г приведен на рис. 10 справа.
Случай 5: а —нецелое число. Графики некоторых функций этого
вида показаны на рис. 11.
> Показательная функция: у = а* (а > 0, а ф 1). Область
определения: х — любое. Область изменения: у > 0. Функция не
является ни четной, ни нечетной; непериодическая, неограниченная.
4.2. Элементарные функции и их графики
41
Рис. 11.
Пересекает ось Оу при у — 1, ось Ох не пересекает. Возрастает на
всей числовой прямой при а > 1 и убывает при 0 < а < 1; экстремумов
не имеет (рис. 12 слева).
У>
\
у
0
i
1
,х
&
Г
¦
X
Рис. 12.
> Логарифмическая функция: у = loga ж (а > 0, а ф 1). Область
определения: х > 0. Область изменения: у — любое. Функция не
является ни четной, ни нечетной; непериодическая, неограниченная.
Пересекает ось Ох при х — 1, ось Оу не пересекает. Возрастает на
всей числовой прямой при а > 1 и убывает при 0 < а < 1; экстремумов
не имеет (рис. 12 справа).
> Тригонометрические функции.
Синус у = sin х. Область определения: х —любое. Область из-
изменения: у G [—1;1]. Функция нечетная, периодическая с перио-
периодом 2тг, ограниченная. Пересекает ось Оу в точке у = 0, ось Ох —
в точках х = тга, п = ±0,±1,±2,... Возрастает на каждом из от-
отрезков [— ^ + 2тгп;-|- + 2тга] и убывает на каждом из отрезков
[y-f27rn; -|-7г-|-27га]. В точках х = у-|-27ггг имеет максимумы (у = 1), в
точках ? = — -|--f27ra — минимумы {у = — 1). График функции у = sin ж
называется синусоидой и изображен на рис. 13 слева.
Основные понятия математического анализа
Рис. 13.
Косинус у = cos ж. Область определения: ж — любое. Область
изменения: у ? [—1; 1]. Функция четная, периодическая с периодом 2тг,
ограниченная. Пересекает ось Оу в точке у — 1, ось Ож — в точках
х = -у+ тггс- Функция возрастает на каждом из отрезков [—7г+27га; 2тга]
и убывает на каждом из отрезков [2тгп; тг -f 2тггг], гг = ±0, ±1, ±2,...;
в точках х = 2тга имеет максимумы (у = 1), в точках ж = тг + 2тга —
минимумы (у = —1). График функции у = cosx представляет собой
синусоиду, сдвинутую относительно графика у = sin ж влево вдоль
оси Ох на величину -у (рис. 13 справа).
Тангенс у = tgx. Область опреде-
ления: х
у=Цх
гп Зтс\
~ -f тгп, п = ±0, ±1, ±2,...
Область изменения: у — любое. Функ-
Функция нечетная, периодическая с пери-
периодом тг, неограниченная. Пересекает
ось Оу в точке у — 0, ось Ох — в точках
х = 7тп. Функция возрастает на каж-
каждом из интервалов (— -у + тгп; у + тгп),
экстремумов не имеет. График функ-
функции у = tgx изображен на рис. 14.
Котангенс y = ctgx. Область опре-
определения: х ф тгп, п = 0,±1,±2,...
Рис. 14. Область изменения: у — любое. Функ-
Функция нечетная, периодическая с периодом тг, неограниченная. Пересе-
Пересекает ось Ох в точках х — -у -f тгп, ось Оу не пересекает. Функция
убывает на каждом из интервалов (тгп; тг+тт), экстремумов не имеет.
> Обратные тригонометрические функции.
Арксинус у = arcsinz. Область определения: х ? [—1;1]. Область
изменения: 2/ Е [—¦§•; -у]. Функция нечетная, непериодическая, огра-
ограниченная, пересекает оси Ох и Оу в начале координат: х = 0, у = 0.
Функция возрастает на всей области определения, экстремумов не
имеет (хотя в точке х = — 1 принимает наименьшее значение у= — -у,
а в точке х — \ — наибольшее значение у — -у). График функции
у — arcsinz представлен на рис. 15. При всех х из области определе-
определения имеет место равенство arccosx = -|- — arcsinz.
4.3. Предел последовательности
Рис. 15.
Арккосинус у = arccos ж. Область определения: ж ? [—1; 1]. Область
изменения: у ? [0; тг]. Функция не является ни четной, ни нечетной,
непериодическая, ограниченная, пересекает ось Оу в точке у = -у,
а ось Ох — в точке х — 1. Функция убывает на всей области
определения, экстремумов не имеет (хотя в точке х = — 1 принимает
наибольшее значение у = тг, а в точке ж = 1 — наименьшее значение
у — 0). График функции у = arccos ж изображен на рис. 15.
Арктангенс у — arctg ж. Область определения: х — любое. Область
изменения: у ? (— ~\ ~). Функция нечетная, непериодическая, огра-
ограниченная, пересекает оси в начале координат: х = 0, у = 0. Функция
возрастает на всей числовой прямой, экстремумов не имеет. График
функции у = arctg ж изображен на рис. 15.
Арккотангенс у = агс^ж. Область определения: ж—любое.
Область изменения: у ? @; тг). Функция не является ни четной, ни
нечетной; она непериодическая, ограниченная, пересекает ось Оу в
точке у= -—, ось Ох не пересекает. Функция убывает на всей числовой
прямой, экстремумов не имеет. При всех ж имеет место равенство
arcctg ж = ¦§• - arctg ж.
Функция называется элементарной, если она может быть получе-
получена с помощью конечного числа арифметических действий и суперпо-
суперпозиций над основными элементарными функциями.
4.3. Предел последовательности
> Некоторые определения. Если каждому натуральному числу п
сопоставлено некоторое число жп, то тем самым определена (число-
44 Основные понятия математического анализа
вал) последовательность xlt х2, .. •, хп, ..., которую кратко обозна-
обозначают {хп}] хп называется общим членом последовательности.
Пример 1. Для последовательности {4п + 1} имеем х^ — 5, х2 = 9, х3 — 13,
х4 = 17 и т.д.
Последовательность называется ограниченной (ограниченной
сверху, ограниченной снизу), если существует такое число М, что
\хп\ < М (соответственно хп < М, хп > М) для всех п = 1, 2, ...
> Предел последовательности. Число Ь называется пределом
последовательности х11 х2, • •, хп, • •, если для любого числа е > О
существует такое число N = N(e), что \хп — b\ < e при всех п> N.
Если Ь является пределом последовательности {хп}, то пишут
lim хп = b или хп -> Ь при п -> оо.
П—f ОО
Предел постоянной последовательности {хп = с} существует и
равен с, т.е. lim = с. В этом случае неравенство |ж„ — с| < е принимает
п-юо
вид 0 < е и выполняется при всех гг.
Пример 2. Показать, что lim = 1.
n-юо П -f 1
Решение. Составим разность
п
- 1
. Неравенству < е
71+ 1 71+1
71+1
удовлетворяют натуральные числа п > 1 = N(e). Таким образом, для каждого
положительного числа е найдется число N = 1 такое, что при п > N будет
?
П
иметь место неравенство
- 1
< е.
71+1
Последовательность {хп} может и не иметь предела, например,
последовательность {хп} = {(—1)п}. Последовательность, предел ко-
которой существует, называется сходящейся.
> Свойства сходящихся последовательностей.
1. Если последовательность сходится, то она имеет только один
предел.
2. Любая сходящаяся последовательность ограничена. Из любой
ограниченной последовательности можно выделить сходящуюся под-
подпоследовательность.
3. Если последовательность сходится к числу 6, то любая ее
подпоследовательность также сходится к числу 6.
4. Если последовательности {хп}, {уп} сходятся, то последова-
последовательности {хп + уп}, {хп • уп} и {хп/уп} также сходятся, причем
lim (хп + уп) — lim x + lim yn,
п—юо п—юо п—foo
lim (xn • уп) = lim xn • lim yn (в частности, lim (cxn) = c lim xn\
n-foo n-foo n-foo v n-?oo n-?oo '
X ^ Xn
lim —~ = nTf°° (здесь yn / 0, lim yn фО).
n~?o° Уп lim 2/n n~*>o°
n-»-oo
4.4. Предел функции 45
5. Если последовательности {хп}, {уп} сходятся и при всех п
выполняется неравенство хп ^ уп, то lim xn ^ lim yn.
п—foo n—foo
6. Если при всех п выполняются неравенства хп ^ уп ^ zn и
lim х = lim z = 6, то и lim yn = 6.
n—foo n—foo n—foo
> Монотонные последовательности. Последовательность {хп}
называется возрастающей (неубывающей), если для любого п выпол-
выполняется неравенство жп+1 > хп (жп+1 ^ хп). Последовательность {хп}
называется убывающей (невозрастающей), если для любого п выпол-
выполняется неравенство жп+1 < хп (жп+1 ^ хп). Все указанные последова-
последовательности называются монотонными.
Теорема. Неубывающая (невозрастающая) и ограниченная сверху
(соответственно снизу) последовательность имеет конечный предел.
Пример 3. Последовательность < I 1 Н 1 >, как мож^о доказать, возра-
возрастает и ограничена сверху, следовательно, она сходится. Ее предел обозначается
буквой е:
= lim A + — ) (ей 2,72).
п-юо \ П /
Логарифмы чисел по основанию е называются натуральными, а
loge х обозначается In ж.
Если члены последовательности хп неограниченно возрастают по
абсолютной величине с ростом п, последовательность называется
бесконечно большой или «стремящейся к бесконечности». Обозна-
Обозначение: lim хп = со. Если при этом члены последовательности, на-
п-юо
чиная с некоторого номера, положительны (отрицательны), то го-
говорят, что хп стремится к «плюс (минус) бесконечности», и пи-
пишут lim хп = +оо ( lim хп = —оо). Например, lim (—1)пп2 = со,
п-юо хп-юо ' п-юо
lim у/п = -foo, lim (—п) — —оо.
4.4. Предел функции
> Определение предела функции. Число Ь называется пределом
функции f(x) при ж, стремящемся к а, если для любого е > О
существует S = 6(е) > 0 такое, что |/(х) — Ь\ < е при 0 < \х — а\ < S.
Обозначения: lim f(x) — Ь или f(x) -> Ь при х -> а.
x—ta
Число Ь называется пределом функции f(x) при х, стремящемся
к -foo, если для любого е > 0 существует N — N(e) > 0 такое, что
|/(х) -Ь\<е при х > N.
Обозначения: lim f(x) = b или f(x) -> b при х -> -foo.
X—f+OO
Аналогичным образом определяются пределы при х -> —оо и
х —>¦ оо.
46 Основные понятия математического анализа
Односторонние пределы. Число Ь называется пределом слева
{справа) функции /(х) при х, стремящемся к а, если для любого е > О
существует S = S(e) > О такое, что |/(х) — Ь\ < е при а — S < х < а
(соответственно при а < х < а + S).
Обозначения: lim /(х) = Ь или /(а — 0) = Ь (соответственно
г—fa—О
lim f(x) - b или f(a + 0) = 6).
^а|0
> Свойства пределов. Пусть а — число или один из символов оо,
Н-оо, —оо.
1. Если функция имеет предел, то этот предел единственный.
2. Если с — константа, то lim с — с.
x-fa
3. Если существуют конечные пределы lim f(x) и limg(x), то
х—Уа х—уа
а) lim [/(х) 4- д(х)] = lim /(х) + lim g{x)\
х—fa x—fa x—?a
б) lim f(x) - g(x) = lim f(x) - lim g(x),
x—Уа x—Уа х—ya
в частности, lim с fix) — с lim fix):
r-fa a;-fa
f i \ lim f(x)
в) lim Ш- = x~*a (если (/(x) / 0, lim g(x) ф 0).
r-fa (/(x) lim^(x) V x-ta v ' y
4. Пусть /(x) ^ ^r(x) в некоторой окрестности точки a (x / a).
Тогда lim /(x) ^ lim^(x), если эти пределы существуют.
г—fa r—fa
5. Если /(х) ^ ^(х) ^ h(x) в некоторой окрестности точки а и
lim f(x) — lim h(x) — b. то lim g(x) = 6.
r-fa x-fa x-fa
Указанные свойства верны и для односторонних пределов.
> Пределы некоторых функций.
1-й замечательный предел: lim = 1.
r-fO X
/ 1 \х
2-й замечательный предел: lim A Н ) — е.
r-f оо V X /
Некоторые другие пределы, находящие частое применение:
A + х)п -1 1-cosx 1 tgx
lim = п, lim = —, hm —— = 1,
r-fO X r-fO X2 2 r-fO X
_. arcsinx arctgx
lim = 1, hm = 1,
r-fO X r-fO X
lim = 1, hm = In a,
x-fO X x-fO X
ln(l + X) l0ga(l + *) !
hm — = 1, hm —2°-^ = log_ e.
x-fO X r-fO X
4.5. Бесконечно малые и бесконечно большие функции 47
4.5. Бесконечно малые и бесконечно
большие функции
> Определения. Функция /(х) называется бесконечно малой при
х —> а, если lim /(х) = 0.
г—fa
Функция /(х) называется бесконечно большой при х —>а, если для
любого числа К > 0 неравенство |/(х)| > К выполняется для всех х ф а
из некоторой окрестности точки а. В этом случае пишут /(х) —> оо
при х —> а или lim /(х) = оо. (В данных определениях а — число
г—fa
или один из символов оо, +оо, —оо.) Если /(х) — бесконечно большая
функция при х —> а и /(х) > 0 (/(х) < 0) в некоторой окрестности
точки а (при х / а), то пишут lim /(x) = 4-со (соответственно
г—fa
lim f(x) = -оо).
х—fa
> Свойства бесконечно малых и бесконечно больших фун-
функций.
1) Сумма и произведение конечного числа бесконечно малых при
х -> а функций являются бесконечно малыми функциями.
• 2) Произведение бесконечно малой при х —> а функции /(х) на
функцию #(х), ограниченную в некоторой окрестности U точки а
(т.е. такую, что \д(х)\ < М для некоторого числа М > 0 и для всех
х ? U), является бесконечно малой функцией.
3) lim /(х) = Ь тогда и только тогда, когда /(х) = Ь + д{х), где
х—?а
д(х) —бесконечно малая при х —> а.
4) Функция /(х) является бесконечно большой тогда и только
тогда, когда функция #(х) = бесконечно малая.
Дх)
> Сравнение бесконечно малых. Бесконечно малые при х —> а
fix)
функции f(x) и д(х) называются эквивалентными, если lim —т~Т" — 1-
аг-fa (ДХ)
Обозначение: /(х) ~ д(х).
Примеры эквивалентных бесконечно малых:
A + е)п - 1 - ne, a* - 1 - elna, loga(l + е) ~ eloga с,
sin ? ~ е, tg ? ~ ?, 1 — cos ? ~ у?2, arcsin e ~ е, arctg e ~ е,
где ? = ?(х) — бесконечно малая при х —> а.
Говорят, что функции /(х) и #(х) — одинакового порядка малости
f(x)
при х —>• а, и пишут /(х) = О(^(х)), если lim —7—г- = А\ 0 < |А^| < оо.*
rfa <7(x)
Встречается также другое определение символа О. А именно, f(x) = O(g(x)j
при х —> а, если в некоторой окрестности точки а (при х ф а) выполняется
неравенство \J(x)\ ^ К"|^(яг)|, К = const.
48Основные понятия математического анализа
Функция f(x) называется функцией более высокого порядка ма-
f()
тпи по сравнению с функц
Обозначение: f(x) = o(g(x)).
р
f(x)
лостпи по сравнению с функцией а(х) при х -> а, если lim , ч = 0.
r-fa g(x)
4.6. Непрерывность
> Непрерывные функции. Функция f(x) называется непрерыв-
непрерывной в точке х = а, если она определена в этой точке (и ее окрестно-
окрестности) и lim f(x) = f(a).
х—?а
У непрерывных функций малому изменению аргумента Дя = х — а
соответствует малое изменение функции Ay = f(x) — /(a), т.е.
Ay -> 0 при Ах —>• 0. (Это свойство нередко используют в качестве
определения непрерывной функции.)
Функция f(x) называется непрерывной справа в точке х = а, если
она определена в этой точке (и справа от нее)-и lim f(x) = f(a).
x—?a-\-0
Функция f(x) называется непрерывной слева в точке х = а, если она
определена в этой точке (и слева от нее) и lim f(x) — f(a).
x—?a—0
> Свойства непрерывных функций:
1. Если функции f(x) и д(х) непрерывны в точке а, то функции
f(x)
f(x)±g(x), cf(x), f(x)g(x), (#(a) Ф 0) также непрерывны в этой
9\х)
точке.
2. Если f(x) непрерывна в точке а и /(а) > 0 (/(а) < 0), то
существует такое число S > 0, что f(x) > 0 (соответственно /(х) < 0)
при х G (а — S,a +6).
3. Функция f(x), непрерывная в каждой точке отрезка [а,0\,
ограничена на этом отрезке и достигает на нем своего наибольшего
значения М и наименьшего значения т.
4. Непрерывная на отрезке [а, /3] функция f(x) принимает на этом
отрезке любое значение с ? [m, M].
5. Если f(x) непрерывна и возрастает (убывает) на отрезке [а, /?],
то на отрезке [/(а),/(/?)] (соответственно на отрезке [/(/?), /(«)])
определена непрерывная и возрастающая (убывающая) обратная
функция х = д(у).
6. Если функция и(х) непрерывна в точке а, а функция f(u)
непрерывна в точке 6 = ti(a), то сложная функция f(u(x)) непрерывна
в точке а.
Замечание. Любая элементарная функция непрерывна в каждой
точке интервала, входящего в ее область определения.
> Точки разрыва функции. Точка а называется точкой разры-
разрыва первого рода функции /(я), если существуют конечные односто-
4.7. Асимптоты графика функции 49
ронние пределы /(а + 0) и /(а — 0), но не выполняются соотношения
lim f{x) = lim f(x) — f(a). Величина |/(a+0)—f(a—0)| называется
x—ya-\-0 x—?a—Q
скачком функции в точке а. В частности, если /(а+0) = /(а—0) ф /(а),
то точка а называется точкой устранимого разрыва.
Примеры функций с точкой разрыва первого рода.
л - ,, ч /О при х < О,
1. Функция /(#) = "S х. п имеет в точке разрыва х = 0 скачок,
I J. ООН 00 ^^ \J
равный 1.
_ , ,, v ГО при а: ^ 0, « _
2. Функция j(x) = < 1 ^ _ 1 имеет устранимый разрыв в точке х = 0.
I 1 при ж — 1
Точка а называется точкой разрыва второго рода, если хотя бы
один из односторонних пределов /(а + 0), /(а — 0) не существует или
равен бесконечности.
Примеры функций с точкой разрыва второго рода.
1. Функция f(x) = sin — имеет разрыв второго рода в точке х = 0 (так как
х
у этой функции не существует односторонних пределов при х —>• ±0).
2. Функция f(x) = 1/х имеет бесконечный разрыв в точке х = 0.
4.7. Асимптоты графика функции
Асимптота графика функции у = f(x) —это прямая, расстояние
до которой от точки (ж, у) на графике функции у = f(x) стремится
к нулю, если хотя бы одна из координат (ж, у) стремится к бесконеч-
бесконечности.
Прямая х — а является вертикальной асимптотой графика функ-
функции у — f(x), если хотя бы один из односторонних пределов функции
f(x) при х —} а равен -foo или — оо.
Прямая у = kx + b является наклонной асимптотой графика
функции у = /(#), если выполняется хотя бы одно из предельных
соотношений: lim [/(#) — kx — b] = 0 или lim [f(x) — kx — b] = 0.
x—^+oo #—> — oo
Если существуют конечные пределы
lim ^- = k} lim [flx)-kx] = b} A)
то прямая у = kx + b является наклонной асимптотой графика при
х —> -foo (аналогично определяется асимптота при х —> —оо).
Пример. Найти асимптоты графика функции у = 1- х.
х — 1
Решение. У графика функции есть вертикальная асимптота х = 1, так как
имеет место бесконечный предел lim ( 1- х 1 = со.
*-п \ х - 1 /
Кроме того, при х —> ±оо существует наклонная асимптота у = кх + Ь>
коэффициенты которой определяются по формулам A):
к= lim
=l, b= lim f—i— + *-*) =0.
lim [
В итоге получим уравнение наклонной асимптоты: у = х.
50 Дифференциальное исчисление
5. Дифференциальное исчисление
функций одной переменной
5.1. Производная и дифференциал,
их геометрический и физический смысл
> Производной f(x) функции у = f(x) в точке х называется
предел отношения приращения функции Ay = f(x + Ах) — f(x) к
приращению аргумента Ах при Дат, стремящемся к нулю:
,/, ч г А?/ г /(* + Ах) - f(x)
f(x) = lim = lim — -1 —L-.
Дя-»0 Да: Да?-»-0 Ах
Используются такие обозначения производной: /'(#), у\ у'х) у,
dy_ Щх)_
dx ' dx
Пример 1. Вычислить производную функции }(х) — х2.
Решение. По определению имеем
(х 4- Ах) — х
fix) = lim -^— '- = lim Bx + Ах) = 2х.
Лх->о Ах Дх->о
Приращение Ах называют также дифференциалом независимой
переменной и обозначают через dx.
Функция, имеющая производную в точке х) называется диффе-
дифференцируемой в данной точке. Дифференцируемость f(x) в точке х
равносильна тому, что приращение функции Ay — f(x + dx) — f(x) в
этой точке представимо в виде Ay = f (x)dx+o(dx) (второе слагаемое
обозначает бесконечно малую более высокого порядка по сравнению
с dx при dx -» 0).
Если функция дифференцируема в точке ж, то она непрерывна
в этой точке. Обратное утверждение неверно: из непрерывности
функции не следует ее дифференцируемость.
Функция f(x) называется дифференцируемой (непрерывно диф-
дифференцируемой) на некотором множестве D (интервале5 отрезке и
т.п.), если в каждой точке х ? D существует (непрерывная) произ-
производная f(x).
Дифференциал dy функции у — f(x) —это главная часть f(x)dx
приращения Ау функции в точке ж, так что Ay = dy + o(dx).
Приближенное равенство Ay « dy или f(x + Ах) « f(x) + f'(x) Ax
(при малых Ах) используется в приближенных вычислениях.
Пример 2. Вычислить приближенно ^/25,5.
Решение. Пусть f(x) = у/х, х = 25, Да; = 0,5. Тогда j'(x) = —^г, /B5) = 5,
2 у/ х
/;B5) = 0,1. Следовательно, у/2Ь? « 5 + 0,1 • 0,5 = 5,05.
5.2. Таблица производных и правила дифференцирования
51
> Физический смысл производной. Пусть функция у = f(x)
описывает путь у, пройденный телом, в зависимости от времени х.
Тогда производная f'(x) есть скорость движения тела в момент
времени х.
> Геометрический смысл производной. Касательной к гра-
графику функции у = f(x) в точке M(xQiyQ), где у0 = f(xQ), на-
называется предельное положение секу-
секущей MN при стремлении точки N к
точке М по графику функции. Если
а — угол между осью х и касатель-
касательной, то f{xQ) = tga — угловой коэф-
коэффициент касательной (рис. 16).
Уравнение касательной к графику
функции у - f(x) в точке М(хо,уо)
имеет вид
/ о
А
1/
А
к
/
dy
Ду
хо+Ах
X
)> k = f'(xo)'
Рис. 16.
5.2. Таблица производных и правила
дифференцирования
Производная любой элементарной функции может быть вычислена
на основе знания производных основных элементарных функций и
правил дифференцирования.
> Таблица производных основных элементарных функций:
(с); = 0 (с = const), {хау = аха-\
(ах)' = ах In a, .
(sin xI = cos ж,
(arcsin x)' =
(arctg a:)' =
(cos x)f = —sin ж,
(ctgar)' = -_l_
sin ж
(arccosx)' = —
(arcctgx)' = —
Часто встречаются также производные гиперболических функций:
(shx); = chx, (chxY =8Ъх, (thx)' = -4—» (cthx); = —-i—.
ch ж sh ж
52 Дифференциальное исчисление
Пример 1. Вычислить производные степенных функций:
а^ (xY - 1 -a;1 - х° - 1-
а; ^х) — 1 х — х — 1,
2
Правила дифференцирования:
1) [ti(x)± «(*)]'= ti'(x)± *'(*);
2) [сг^ж)]' = си'(х), где с = const;
3) [u(ar) - v(x)Y = и'{х) • v{x) + и(х) • г/(я);
() ;()()(У()
5) производная сложной функции [/(ti(x))] = /^(u) • ^'(ж);
6) если функция f(x) дифференцируема и монотонна на интер-
интервале (а, 6), х0 6 (а, 6) и f(x0) ф О, то обратная функция х — д(у)
дифференцируема в точке у0 = f(x0) и справедливо равенство
9>(Уо) = ТЫ'
7) производная параметрически заданной функции х = p(t),
Vt Qf(t)
у — q(t) вычисляется по формуле ух — —~ = f ;
8) если функция задана неявно уравнением F(#, у) = 0, то, диффе-
дифференцируя по х тождество F(x, f(x)) — 0, для определения производной
f'(x) получим выражение ух = -F'x/Fy.
х2
Пример 2. Вычислить производную функции .
Решение. Используя четвертое правило, последовательно получим
т>2 \ ' (_2\/(Orp i 1 \ ^2/0— I I \/ OrlOr 4- 1 ^ 9т»2 От^ -L От
2 ~ Bа; + IJ ~ Bа; + IJ "
Пример 3. Вычислить производные функций: a) sin 2x и б) In cos а:.
Решение. Используя правило дифференцирования сложных функций, имеем
а) (sin 2x)' = cos 2x • Bх)' = 2 cos 2x\
б) (Inсое*)' = -L_-(coea;)' = - tg*.
Пример 4. Найти производную, если функция у = f(x) задана равенством
еу _ е-* + ху = 0.
Решение. Дифференцируя равенство, найдем еу • у1 + е~х + 2/ + х - у1 = 0.
Поэтому у = .
еУ + х
5.3. Теоремы о дифференцируемых
функциях. Правило Лопиталя
> Основные теоремы о дифференцируемых функциях.
Теорема Рояля. Если функция у — f[x) непрерывна на отрезке
[а, 6], дифференцируема на интервале (а, Ь) и /(а) = /F), то найдется
хотя бы одна точка с ? (а, 6) такая, что /'(с) = 0.
5.3. Теоремы о дифференцируемых функциях. Правило Лопиталя 53
Теорема Лагранжа. Если функция у = f(x) непрерывна на отрезке
[а, Ь] и дифференцируема на интервале (а, 6), то найдется хотя бы одна
точка с ? (а, 6) такая, что
№-f(a) = f(c)(b-a).
Это равенство называют формулой конечных приращений.
Теорема Коши. Пусть функции f(x) и д(х) непрерывны на отрезке
[а, 6], дифференцируемы на интервале (а, 6) и д'(х) ф О при всех
х ? (а, Ь). Тогда найдется хотя бы одна точка с ? (а, 6) такая, что
/F)-/(а) = /'(с)
д(Ь)-д(а) д'(с) '
^ Правило Лопиталя раскрытия неопределенностей. Пусть
функции f(x) и д(х) дифференцируемы и д'(х) ф О в некоторой
окрестности точки а (хфа). Если /(ж) и #(#) —бесконечно малые или
fix)
бесконечно большие функции при х —>• а, т.е. если —г~г представляет
О- оо
в точке а неопределенность вида — или , то
О оо
hm -7-7 = lim -77-f
(при условии, что существует конечный или бесконечный предел
отношения производных).
Замечание. Правило Лопиталя применимо и в том случае, когда а
представляет собой один из символов оо, +оо, —оо.
sin а:
Пример 1. Вычислить lim .
*-»о 1 - ех
Решение. Используя правило Лопиталя, последовательно имеем
, . v lim cos а: п
sina: (smr) cosa: x_+q cosO 1
i™ = ™ = ™ = = ~^~ = 7
i™ 1 - e-2^ = «™ A - e-2*)' = «™ 2e^ = lim 2e~2* = 2^ = 7'
Неопределенности вида @ • оо) и (оо — оо) приводятся к неопреде-
0 оо
ленностям вида — или — с помощью алгебраических преобразова-
0 оо
0 оо
' / \ / \ и(х)
нии, например и{х) • v(x) — — .
l/v(x)
/()
Неопределенности вида A°°), (оо°), @°) приводятся к неопреде-
0 оо
ленностям вида — или — с помощью предварительного логарифми-
0 оо
рования: ти = vmu — —:—.
1/v
Пример 2. Вычислить lim (cosa:I/^ .
Решение. Здесь имеет место неопределенность вида 1°°, поэтому сначала
находим In lim (cos а:I/* = lim Wcosa;I/* = lim = lim = .
x-*0 x-fO x->0 X2 х-Ю 2x 2
Следовательно, lim (cos a;I/* = e'2 = —pr.
o ye
54 Дифференциальное исчисление
5.4. Производные и дифференциалы высших
порядков. Формула Тейлора
> Производной второго порядка или второй производной функ-
функции f(x) называется производная от производной f (х)) которая обо-
d2y
значается у11 или или f"(x). Производная от производной вто-
ахг
рого порядка называется производной третьего порядка у111 — {у1'I.
Производная п-го порядка от функции y — f[x) определяется как про-
dnv
изводная от производной порядка (п — 1) и обозначается j/n) или ——
ахп
Ч1ЛИ fW(x).
Дифференциалом второго порядка называется дифференциал от
дифференциала первого порядка: d2y — d(dy). Если х — независимая
переменная, то справедлива формула d2y = у" • (dxJ. Аналогично
определяются дифференциалы третьего и других порядков.
> Формула Тейлора. Если функция у — f(x) имеет производные до
(п + 1)-го порядка включительно в некоторой окрестности точки а,
то для всех х из этой окрестности справедливо равенство
f(n+1)(a + k(x - а))
где Rn(x) = ^ —у- ;-+-(х-а)п+1 @ < к < 1) — остаточный
член формулы Тейлора (в форме Лагранжа).
При а — 0 формула Тейлора принимает зид
и называется формулой Маклорена.
Формулы Маклорена для ех, sin x, cos x и некоторых других
функций могут быть получены из выражений этих функций, приве-
приведенных в разд. 11.3, если в указанных выражениях заменить много-
многоточие в конце остаточным членом.
5.5. Экстремумы. Точки перегиба
> Минимумы и максимумы. Экстремумы. Если функция f(x)
дифференцируема на интервале (а, 6) и f'(x) > 0 (f'{x) < 0) на (а, 6),
то f(x) возрастает (соответственно убывает) на этом интервале.*
Если существует такая окрестность точки х0, что для всех точек
х ф х0, принадлежащих этой окрестности, выполняется неравенство
f(x) > f(x0) {f(x) < /(#о))> то хо называется точкой минимума
(максимума) функции f(x).
В отдельных точках интервала производная может обращаться в нуль.
5.5. Экстремумы. Точки перегиба 55
Точки минимума и максимума называются точками экстремума.
Точки, в которых производная f'{x) не существует или обраща-
обращается в нуль, называются критическими точками функции f(x).
^ Условия существования экстремума. Необходимый признак
экстремума: каждая точка экстремума функции f(x) является кри-
критической точкой этой функции.
Достаточные условия экстремума.
1. Пусть функция f(x) непрерывна в некоторой окрестности
(х0 - (J, х0 + 8) критической точки х0 и дифференцируема во всех
точках этой окрестности, за исключением, быть может, самой точ-
ки х0. Если f'(x) > 0 при х ? {х0 —^ ж0) и/'(ж) < 0 при ж G (ж0, хо+8),
то х0 — точка максимума функции. Если f'{x) < О при х ? (х0 — 8, х0)
и ff(x) > 0 при х ? (ж0, х0 + (J), то х0 —точка минимума.
Если f'{x) сохраняет свой знак при всех х ф ж0, х ? {х0 — 6, хо+8),
то точка х0 не является точкой экстремума.
2. Пусть функция f(x) n раз дифференцируема в некоторой
окрестности точки х0 и f'(x0) — f"{x0) — ••• — /^п~^(жо) — 0> а
/(п)(ж0) / 0. Тогда, если п — четное, то при f^n\x0) < 0 точка ж0
является точкой максимума, а при f^{xQ) > 0 — точкой минимума.
Если п — нечетное, то х0 не является точкой экстремума.
> Наибольшее и наименьшее значения функции. Пусть функ-
функция у = f(x) непрерывна на отрезке [а,Ь] и дифференцируема во всех
точках этого отрезка за исключением, быть может, конечного чис-
числа точек. Тогда наибольшее и наименьшее значения функции f(x) на
отрезке [а, Ь] находятся среди значений /(a), f(b) и значений f(x{) в
критических точках xi ? (a, 6).
> Направление выпуклости графика функции. Говорят, что
график дифференцируемой функции у — f(x) направлен выпуклостью
вверх (выпуклостью вниз) на интервале (а, 6), если этот график
в пределах указанного интервала лежит ниже (выше) любой своей
касательной.
Если функция у — f(x) дважды дифференцируема на интервале
(а, 6) и f"(x) < 0 [f"(x) > 0), то график этой функции направлен на
рассматриваемом интервале выпуклостью вверх (вниз). (В отдельных
точках интервала вторая производная может обращаться в нуль.)
Таким образом, чтобы найти интервалы, на которых график
дважды дифференцируемой функции направлен выпуклостью вверх
(вниз), нужно решить неравенство f"(x) < 0 (f"(x) > 0).
> Точкой перегиба графика функции у = f(x) называется точка
(жо> /(жо))> в которой график функции переходит с одной стороны
касательной на другую. В точке перегиба график функции меняет
направление выпуклости.
56 Дифференциальное исчисление
Пусть функция у — f(x) имеет непрерывную вторую производную
f"(x) в некоторой окрестности точки х0. Если fff{xQ) = 0 и f"(x)
меняет свой знак при переходе через точку х0, то точка (х0, f{xQ))
является точкой перегиба.
5.6. Общая схема исследования функции и
построение графика
Общая схема исследования функции и построение графика:
1. Находим область определения функции.
2. Находим асимптоты графика функции.
3. Исследуем функцию на монотонность и экстремумы.
4. Определяем направление выпуклости графика и точки пе-
перегиба.
5. Выясняем, является ли функция четной или нечетной, является
ли она периодической.
6. Находим точки пересечения графика с осями координат.
7. Строим график функции.
In х
Пример. Исследовать функцию у = и построить ее график.
Решение. Используем общую схему исследования функции.
1. Область определения функции: 0 < х < +оо.
2. Прямая х = 0 является вертикальной асимптотой, так как lim = —оо.
х—t-^-Q X
Найдем наклонные асимптоты:
к = lim — = 0, 6 = lim (у - кх) = 0.
Следовательно, прямая у = 0 является гори-
горизонтальной асимптотой графика.
i / о тт , 1-lna?
• ' 3. Производная у = равна нулю
при lnx = 1, следовательно, х = е — критиче-
р екая точка. При х ? @, е) имеем у' > 0, т.е.
г*ис. 17. на этом интервале функция возрастает. При
х € (е, +оо) справедливо неравенство у' < О,
поэтому здесь функция убывает. При х = е функция достигает максимального
1
значения, равного 3/тах = —.
4. Вторая производная у" = равна нулю при х = е3/2. На интервале
@,е3/2) имеем у" < 0, поэтому здесь график функции обращен выпуклостью
вверх. При х € (е3/2,+оо) справедливо неравенство у" > 0, и на этом интервале
график обращен выпуклостью вниз. Значению х = е3'2 соответствует точка
перегиба графика с ординатой у = -|-е~3/2.
5. Функция не является ни четной, ни нечетной, так как допустимы лишь
значения х > 0, и равенства f(—x) = f(x) и f(—x) = —f(x) выполняться не могут.
Очевидно, что функция непериодическая.
6. График не пересекает ось у, так как при х = 0 функция не определена.
Далее, у = 0 лишь при х = 1, т.е. график пересекает ось х только в точке A,0).
7. Используя результаты исследования, строим график функции (рис. 17).
6.1. Точечные множества. Функции. Предел и непрерывность 57
6. Функции нескольких переменных
6.1. Точечные множества. Функции.
Предел и непрерывность
> Множества на плоскости и в пространстве. Окрестностью
радиуса е точки Мо (на плоскости или в пространстве) называется
множество точек М таких, что р(М0, М) <е, где р{М0, М) —расстоя-
—расстояние между точками Мо и М (соответствующие формулы для р приве-
приведены в разд. 1.1 и разд. 2.1). Внутренней точкой множества D назы-
называется такая точка, в некоторой окрестности которой лежат только
точки из D. Открытым называется множество, все точки которо-
которого внутренние. Граничной точкой множества D называется точка, в
любой окрестности которой находятся как точки множества D) так
и точки, не принадлежащие D. Замкнутым называется множество,
содержащее все свои граничные точки. Ограниченным называется
множество, которое содержится в некоторой окрестности начала ко-
координат; если такой окрестности не существует, множество называ-
называется неограниченным.
> Функции двух и трех переменных. Говорят, что на множе-
множестве D задана (числовая) функция, если каждой точке М ? D поста-
поставлено в соответствие единственное число. Если множество D принад-
принадлежит плоскости, то точка М ? D определяется двумя координатами
ж, у, и функция z = f(M) — f{x,y) называется функцией двух пере-
переменных] если D лежит в пространстве, то говорят о функции трех
переменных. Множество D называется областью определения функ-
функции. Например, функция z — y/l — х2 — у2 определена в замкнутом
круге х2 + у2 ^ 1.
Графиком функции двух переменных является поверхность в трех-
трехмерном пространстве. Например, графиком функции z — ах + by + с
является плоскость, а функции z — y/l — х2 — у2—полусфера.
Линия уровня функции z — /(ж, у) —это линия на плоскости
х, у, во всех точках которой функция принимает одно и то же
значение z — с; уравнение линии уровня: /(ж, у) — с. Поверхность
уровня функции и — f(x,y,z) —это поверхность, во всех точках
которой функция принимает одно и то же значение и — с; уравнение
поверхности уровня: f(x,y,z) = с.
Функция /(М) называется ограниченной на множестве D, если
существует такая константа С, что для всех М ? D выполняется
неравенство |/(М)| ^ С.
> Предел и непрерывность. Пусть переменная точка М стре-
стремится к точке Мо, т.е. расстояние р = р(М0, М) —> 0. При этом зна-
значения функции f(M) могут стремиться к некоторой константе Ь.
58 Функции нескольких переменных
Число b называется пределом функции f(M) в точке Мо, если
для любого (сколь угодно малого) е > О найдется число S > О
такое, что для всех точек М из области определения функции,
удовлетворяющих условию 0 < р(М0,М) < S, будет выполняться
неравенство \f(M) — b\ < е. Записывают это так: lim f(M) — b.
Функция f(M) называется непрерывной в точке Мо, если
lim f(M) = f(M0). Функция называется непрерывной на множе-
р—уО
стве D, если она непрерывна в каждой точке D. Если функция f(M)
непрерывна на замкнутом ограниченном множестве, то она ограни-
ограничена на этом множестве и достигает на нем своих наибольшего и
наименьшего значений.
6.2. Дифференцирование функций
нескольких переменных
Для краткости ограничимся случаем функции двух переменных,
однако все утверждения легко обобщаются на случай функций любо-
любого числа переменных.
> Приращения и частные производные. Приращением функ-
функции z = f(x,y) в точке (х, у) называется величина
Az = f(x + Ax,y + Ay) - f(x, у),
где Ах, Ау — приращения независимых переменных. Частными
приращениями по х и по у называются соответственно величины
Axz = f(x + Ах, у) - f(x, у), Ayz = f(x, у 4- Ay) - f{x, у).
Частными производными функций z по х и по у в точке (х,у)
Axz A z
называются соответственно величины lim —=— и lim —-— (при
Дя-+о Ах Ду-*о Ау
условии, что эти пределы существуют). Для них приняты обозначе-
ния: —, 4, fUx>y) и у"' 4' &Х>У) (иногда штрихи опускают).
> Дифференцируемые функции. Дифференциал. Функция
z — f{x,y) называется дифференцируемой в точке (х, у), если ее при-
приращение в этой точке представимо в виде
Az = А(х, у) Ах + В(х, у)Ау + о(р), р = у/(АхJ + (АуJ,
где о(р) — величина более высокого порядка малости по сравнению с
р при р -> 0 (т.е. о(р)/р -> 0 при р —> 0). В этом случае в точке (х, у)
существуют частные производные, причем z'x = А(х,у), z'y = В(х,у).
6.2. Дифференцирование функций нескольких переменных 59
Обратно, если функция имеет в точке (я, у) непрерывные частные
производные, то она дифференцируема в этой точке.
Дифференциалом функции z = /(#, у) называется величина
которую (полагая дифференциалы dx и dy независимых перемен-
переменных равными соответственно Ах и Ау) записывают также в виде
dz=fx(x,y)dx + fy{x,y)dy.
Соотношение Az — dz + о(р) при малых Ах и Ау широко исполь-
используется в приближенных вычислениях, в частности, при подсчете по-
погрешности вычисления значений функции.
Пример 1. Пусть значения аргументов функции z = х2у5 известны с
погрешностью: х = 2 ± 0,01, у = 1 ± 0,01. Подсчитаем приближенно значение
функции.
Решение. Имеем в точке х = 2,у = 1: Д2«<?г = 2-2-150,01+5-22140,01 =0,24
(при Ах = Ау = 0,01). Поэтому можно считать z = 4 dh 0,24.
Если функция z = f(x,y) дифференцируема в точке (хо,уо), то
/(*, У) = /(х0, %) + /i(«o> %)(* - хо) + ?у(хо>Уо)(У - Уо) + °(Р)-
Отсюда при малыхр, т.е. при х&хо,у&уо, получается приближенная
формула
/(*,У) « /(жО1 Уо) + ^(«о»%)(« ~ хо) + ?у(хо>Уо){У - Уо)-
Замена функции таким линейным выражением вблизи данной точки
называется линеаризацией.
> Сложная функция. Пусть z = f(x,y), причем х = ж(г/,г;),
?/ = y(u}v). Пусть для (и, v) G Z? функции x{u)v)) у{и^у) принимают
значения, при которых функция z = /(ж, у) определена. Тем самым на
множестве D задается функция z(u,v) = f{x(u,v),y(u,v)), которая
называется сложной функцией; при этом функция f(x,y) называется
внешней, а х{и) v), y(u) v) —внутренними функциями.
Частные производные сложной функции находятся по формулам
dz___df^dx_ dl_.dy_ dz_ _ д[_дх_ df ду
ди дх ди ду ди ' dv dx dv ду dv
Пусть z = z(t, х, у), причем х = x(t), у = y(t). Тогда z, в конечном
dz
счете, зависит только от t. Производная —г- вычисляется по формуле
at
dz _ dz dz dx dz dy
~dt ~ ltt'*r~dx~dt+ ду dt '
й -^—)
Эта производная (в отличие от частной производной -^—) называется
полной производной.
60 Функции нескольких переменных
> Вторые частные производные и вторые дифференциалы.
Вторыми частными производными функции z = f(x,y) называются
частные производные от ее первых частных производных. Их обо-
обозначают так:
d z _ // _ / / у ® z _ „ _ , , у
дх2 ~~ хх ~ 1 х)х) дхду ~ ху ~ 1 х)у}
® Z _ Ji — (J у ® Z — Ji — (J у
дудх ух ~ Уу)х) ду2 уу-^у'у
Производные z'?y и z'yx называются смешанными. Если в рассматри-
рассматриваемой точке смешанные производные непрерывны, то они равны в
этой точке.
Аналогично определяются частные производные более высоких
порядков.
Вторым дифференциалом функции z = f(x,y) называется выра-
выражение
d2z = d(dz) = (dz)'xAx + (dz)'yAy = 4'ЛАхJ + 2<уД*Ду + z''y (ДуJ.
Аналогично определяются d3z, dAz и т.д.
> Формула Тейлора. Если в точке (х, у) функция z = f(x,y)
имеет частные производные до п-го порядка включительно, то ее
приращение Az в данной точке можно записать в виде
H2z d3z dn z
Az = dz + —+ — + ¦¦¦ + —+o(pn) (р
^ Неявные функции и их дифференцирование. Уравнение
F(x,y) = 0, имеющее решение (хо,уо), определяет в окрестности х0
переменную у как непрерывную функцию х при условии, что про-
производная Fy(x,y) ф 0 и непрерывна в некоторой окрестности точки
(хо,уо). Если, кроме того, в окрестности этой точки существует не-
непрерывная производная F'x, то неявная функция у = у(х) имеет про-
* ^ dy Fx
изводную, определяемую по формуле -—— = у.
dx Fy
Рассмотрим теперь уравнение F(x,y,z) = 0, связывающее пере-
переменные х, у, z. Если F(x0, у0, z0) — 0 и в окрестности точки (х0, у0, z0)
существуют непрерывные частные производные F'x, F'y) F'z) причем
Fz(xo,yQ)zo) ф 0, то уравнение F(x,y,z) = 0 в некоторой окрестно-
окрестности точки (#0, Уо) имеет единственное решение z — ip(x,y) такое, что
(р(х0, у0) = z0; при этом функция z = (p(x, у) непрерывна и рхмеет непре-
непрерывные частные производные, которые определяются по формулам
dz___K_ <^___?i
дх ~~ F'z ' ду ~ F'z '
Пример 2. Для уравнениях2+хsin y-f 2^-f ez = 0 имеем F'z = 2+ez фО. Значит,
данное уравнение задает всюду определенную функцию z = ц>(х,у), частные
dz 2x-\-siny dz xcosy
производные которой равны = , = .
дх 2 + ez ду 2 + ez
6.3. Производная по направлению. Геометрические приложения 61
6.3. Производная по направлению.
Геометрические приложения
^ Производная по направлению. Говорят, что в некоторой обла-
области цлоскости задано скалярное поле, если каждой точке М(х,у) этой
области сопоставлено определенное число z = f{M) = f(x, у). Приме-
Примерами скалярных полей могут служить поле температур, поле давле-
давлений и др. Линией уровня поля называют линию уровня задающей его
функции (см. разд. 6.1). Такими линиями являются изотермы для по-
поля температур, изобары для поля давлений и т.п.
Для изучения поведения поля z = f(x,y) в точке М0(х0,у0) в
направлении вектора а = {ах, а2} следует через Мо провести прямую
с направляющим вектором а (ее уравнения х = х0 + ахг, у = у0 + a2i)
и исследовать функцию z(t) = f(x0 + axt, y0 + a2t). Производная
функции z(t) в точке Мо (т.е. при t = 0) характеризует скорость
изменения поля в этой точке в направлении а. Если величину z'@)'
разделить на \а\, то получим производную по направлению а от
данного скалярного поля в данной точке:
Ё1 = JL
За \а\
где \а\ — yja\
Градиентом скалярного поля z = f{x,y) называется вектор-
функция
В каждой точке поля градиент ортогонален к линии уровня, прохо-
проходящей через эту точку; он показывает направление наибольшего ро-
роста поля. При помощи градиента производная по направлению может
быть записана в виде
df a
w=wg f-
Замечание. Все изложенное допускает очевидное обобщение на случай
пространственного скалярного поля.
> Геометрические приложения теории функций несколь-
нескольких переменных. Уравнение касательной плоскости к поверхно-
поверхности z = f{x,y) в точке Afo(j?o,2/O,zo), где z0 = /(ж0, j/0), имеет вид
Вектор нормали к поверхности в этой точке:
62 Функции нескольких переменных
Если поверхность задается неявно уравнением Ф(х, у, z) — О, то
уравнение касательной плоскости в точке М0(х0) у0, z0) имеет вид
ФA* II У \\ 1* — 1* I I (ft [ т* II у II?/ — II 1 I Q) A* II 7 117 — 7 I — Г)
х\Х0> #0' zo)\x х0/ ' ^у\х0> 2/0' z0/Vi/ #0/ ' ^2 Vx0' 2/0' z0)\z z0/ — u'
а вектор нормали к поверхности в этой точке
Пусть поверхность задается параметрически уравнениями
x = x(u,v), y = y(u,v), z = z(u,v)
или, в векторной записи, г = r(u,v), где г* = {ж,?/, z}, и пусть
M0(x(u0,v0), y{uo,vo), z(uOivo))—точка поверхности, отвечающая
значениям параметров и = и0, v = v0. Тогда вектор нормали к
поверхности в точке Мо можно найти по формуле
дг дг \ \
ди dv
хи Уи
У1,
где все частные производные вычисляются в точке Мо.
6.4. Экстремумы функций нескольких
переменных
> Необходимое и достаточные условия экстремума функ-
функций двух переменных. Точка (хо,уо) называется точкой мини-
минимума (максимума) функции z = f(x,y), если в некоторой окрестно-
окрестности точки (#o>%) функция определена и удовлетворяет неравенству
f(x>y) > f(xo>yo) (соответственно f(x, у) < f(xo,yQ)). Точки макси-
максимума и минимума называются точками экстремума функции.
Необходимое условие экстремума. Если в точке экстремума функ-
функция имеет первые частные производные, то они обращаются в этой
точке в нуль. Отсюда следует, что для отыскания точек экстрему-
экстремума такой функции z = f(x,y) следует решить систему уравнений
fx(x, у) = 0, fy{xy у) = 0. Точки, координаты которых удовлетворяют
этой системе, называются критическими точками функции. Среди
них могут быть точки максимума, точки минимума, а также точки,
не являющиеся точками экстремума.
Достаточные условия экстремума используются для выделения
точек экстремума из множества критических точек и перечислены
ниже.
Пусть функция z = f(x,y) имеет в критической точке непрерыв-
непрерывные вторые частные производные. Если в этой точке выполняется
6.4. Экстремумы функций нескольких переменных 63
условие А = fJxfyy ~ (ЛгуJ > 0, то она является точкой минимума
при fxx > 0 и точкой максимума при fxx < 0. Если в критической
точке А < 0, то она не является точкой экстремума. В случае А = 0
требуется более тонкое исследование характера критической точки,
которая в этом случае может быть точкой экстремума, а может и не
быть таковой.
> Экстремумы функций трех переменных. В случае функции
трех переменных определения точек экстремума дословно повторяют
соответствующие определения для функции двух переменных. Огра-
Ограничимся изложением порядка исследования функции и = Ф(х,у,г) на
экстремум. Решая систему уравнений Фх = Ф'у = Ф'2 = 0, следует найти
критические точки функции, а затем в каждой из критических точек
вычислить величины
ф" ф"
^хх ^ху
ф" ф" ф"
хх ху xz
хх ху xz
„ „- , ~з- *ху *уу «у,
—' •'•' ф" ф" ф"
^xz yz ^zz
Если все три величины положительны, то рассматриваемая критиче-
критическая точка является точкой минимума; если Дх < 0, Д2>0, Д3<0,
то данная критическая точка является точкой максимума.
> Условный экстремум функции двух переменных. Точка
(хо,уо) называется точкой условного минимума (максимума) функ-
функции z = f(x,y) при условии (р(х,у) = 0, если существует окрестность
точки (х0, г/о)) в которой функция z = /(#, у) определена и в которой
f(x,y) > f{xo,yo) (соответственно f(x,y) < f(xOiyo)) для всех точек
(х,у), координаты которых удовлетворяют уравнению <р(х,у) = 0.
Для нахождения точек условного экстремума используют функ-
функцию Лагранжа
где число Л называется множителем Лагранжа. Решая систему трех
уравнений
дФ Л дФ дФ
находят критические точки функции Лагранжа (а также значение
вспомогательного множителя Л). В этих критических точках может
быть условный экстремум. Приведенная система дает лишь необходи-
необходимые условия экстремума, но не достаточные: ей могут удовлетворять
координаты точек, не являющихся точками условного экстремума.
Однако, исходя из существа задачи, часто удается установить харак-
характер критической точки.
64 Неопределенный интеграл
> Условный экстремум функции многих переменных. Рас-
Рассмотрим функцию п переменных и = f(xl)x2)...)xn) при условии,
что хг, х2, ..., хп связаны m уравнениями (т < п):
' <р1(х1,х2,...,хп) = 0,
(р2(х1,х2,...,хп) = 0,
Чтобы найти значения х1} х2) ..., хп) при которых у функции /
могут быть условные максимумы и минимумы, составляют функцию
Лагранжа
Ф(ж1,..., хп, А1}..., Ат) = / + Хг(рг + \2<р2 + • • • +. Ату?т
и приравнивают нулю ее частные производные по всем переменным
х1} ..., хп и параметрам Ах, ..., Ат. Из полученных п + т уравнений
определяют х1у х2, ..., ж^ (а также значения вспомогательных неиз-
неизвестных А1} ..., Ат — множителей Лагранжа). Как и для функций
двух переменных, вопрос о том, будет ли при найденных значениях
аргументов заданная функция иметь условный экстремум или нет,
требует дополнительного исследования.
7. Неопределенный интеграл
7.1. Первообразная. Неопределенный
интеграл и его свойства
> Первообразной для функции f(x) на данном интервале называ-
называется такая функция F(x), производная которой равна f(x) (для всех х
из данного интервала):
F'(x) = /(*).
Пример 1. Пусть f(x) = 2х. Тогда функции F(x) = х2 и Fx(x) = х2 - 3
являются первообразными для функции f(x), так как (х2I = 2хи (х2 — 3); = 2х.
Каждая непрерывная в интервале (а, Ь) функция f(x) имеет беско-
бесконечное множество первообразных на (а, Ь). Если F(x) — одна из них,
то всякая другая имеет вид F(x) + С, где С — постоянная величина.
> Неопределенным интегралом от функции f(x) называется
совокупность F(x) + С всех ее первообразных:
f(x) dx = F(x) + С.
7.2. Таблица основных интегралов. Примеры интегрирования 65
Здесь f(x) dx называется подынтегральным выражением, /(ж) — по-
подынтегральной функцией. Вычисление неопределенного интеграла от
данного подынтегрального выражения называется интегрированием.
Дифференциал dx указывает на то> что интегрирование ведется по
переменной х.
Пример 2. J6x2 dx = 2х3 + С, так как Bх3)' ^бх2.
р- Свойства неопределенного интеграла:
2.
1. d (J f{x) <fa) = f(x) dx,. (J_ f(x) dx^j = f(x).
IdF{x) = F(x) + C, f F'(x)dx = F(x) + C.
3. / af(x) dx = a I f(x) dx (o = const).
4. j[f(x) ±g(x)] dx = J f(x) dx±j g(z) dx.
7.2. Таблица основных интегралов.
Примеры интегрирования
> Таблица основных интегралов. Ниже приведены простейшие
интегралы, знание которых необходимо для интегрирования более
сложных выражений:
/dx
— = 1П|
fa*dx
/ sin x dx = - cos x + C, / cos x dx = sin x + C,
tgxdx = -ln|cosz| + C, /
sin^x . . - J cos2x
/dx 1 x f dx 1 _ |x-a I _
2^ 2 = — arctg — + C, / = --In —-— + C,
x2 + a2 a a J x2 — a2 2a I x + a I
Более подробная таблица неопределенных интегралов приведена
в приложении 2.
3 А. Д. Полянин, В. Д. Полянин и др.
66 Неопределенный интеграл
> Примеры непосредственного интегрирования. В отличие
от вычисления производной, не существует общих правил, позволяю-
позволяющих проинтегрировать любую заданную функцию. Многие интегра-
интегралы вообще не выражаются через элементарные функции, например,
sin я ,
dx.
х
Применение свойств 3 и 4 из разд. 7.1 часто позволяет свести
интегрирование к табличным формулам.
Возможности применения табличных формул связаны также с
тем, что под знаком дифференциала может стоять любая функция
z{x). В этом случае подынтегральная функция должна быть таблич-
табличной функцией, зависящей от z(x).
Пример 2. / e*l*\dz(x) = ezW + С.
ПримерЗ. / = ln|sina:| + С.
J sin*
Преобразование интеграла к табличному часто достигается при
помощи внесения некоторой функции под знак дифференциала.
¦ [ [ sinхdx f -dcosx
Пример 4. I tgxdx= I = / = - In |cosa:| + C.
J J cosx J cosx
/f 1 Bx 4- 1Л3/2
y/2x + ldx = / Bx + 1I/2 — dBx + 1) = + ^ + C.
Интегралы вида / —-— , / вычисляются
-J ax2 + bx + c J y/ax2 + bx + c
при помощи выделения полного квадрата:
ах2 bx c-a(x —Y- —
с-а\х 2а) 4а +с-
После этого, заменив dx на равный ему дифференциал d[x Н ),
V 2а J
используют одну из четырех последних формул, приведенных выше в
таблице основных интегралов.
Пример 6. / Х = / — ^Х =г = arcsin(a: - 1) + С.
J V2X-X* J 0 - (х - 1J
7.3. Интегрирование по частям. Метод
замены переменной
> Интегрирование по частям — это интегрирование по формуле
/ udv = uv — I vdu. A)
7.3. Интегрирование по частям. Метод замены переменной 67
Этот метод позволяет вычислять интегралы следующих видов:
A) / Р(х)еах dx, / Р(х) cos(ax) dx, j P(x) sin(az) dx,
B) / P(x) In x dx, I P(x) arctg xdx, I P(x) arcsin x dx,
где P(x)—многочлен.
Для интегралов типа А) в формуле A) полагаем Р(х) = и, а для
интегралов типа В) полагаем Р(х) dx = dv.
Пример 1. Вычислить интеграл /(За: + 1)е2х dx.
Решение. Полагая и — За: -f I, dv — е2х dx, находим du — 3dx, v — ye21.
Поэтому /(За; + l)e2x dx = \{Ъх -f l)e2x -±fe2xdx= ±Cx + l)e2x - \e2x + С =
= {lLx-\)e2x + C.
Пример 2. Вычислить интеграл I In a: da:.
dx
Решение. Полагая и = In a:, dv = dx, находим du = , v = x. Поэтому
x
/ Inx dx = x In x — / dx = x In x — x + C.
С помощью интегрирования по частям можно вычислять интегра-
интегралы вида
/ Р{х)еах sin(bx) dx, f P{x)eax cos{bx) dx,
где Р(х) —многочлен, а также ряд других интегралов.
> Метод замены переменной. Замена переменной (иногда назы-
называемая также подстановкой) состоит в том, что вместо переменной х
в подынтегральное выражение f(x) dx вводится функция х = h(z). В
результате получим
Jf(x)dx = Jf(h(z)).h'(z)dz,
причем в случае удачно подобранной замены последний интеграл
проще исходного.
Пример 3. Вычислить интеграл I xy/1 — xdx.
Решение. Сделаем замену л/1 — х = z. Тогда х = 1 — z2, dx = —2zdz
и $xy/T^~x~dx = -/A - z2)z2zdz = -J-23 + \zb + С = -
5
Пример 4. Вычислить интеграл
f e3xdx
J e* + 2-
замену ех -
f ^Xdx = f z2dz _
J e* + 2 J z + 2
dz
Решение. Сделаем замену ех = z. Тогда х — lnz, dx — . Поэтому
z
z+2
= — e2x - 2ex + 4ln(e* + 2) + С
В разд. 7.4 — 7.6 указаны типичные замены, позволяющие вычи-
вычислять некоторые более сложные- интегралы.
68 Неопределенный интеграл
7.4. Интегрирование рациональных функций
> Описание метода. Рациональной функцией или рациональной
дробью называется отношение многочленов
У- B)
v ; апхп + ••- + агх + а0
Бели т < п, то дробь называется правильной] если т ^ п —
неправильной.
Каждую правильную дробь можно разложить на сумму простей-
простейших дробей. Для этого знаменатель дроби следует разложить на про-
простые множители вида
{x-\kf\ 4 = 1,2,....JC,
где pkJ qs — натуральные числа, C? — Arfs < 0. Каждому такому множи-
множителю в разложении рациональной функции B) на простейшие дроби
отвечает столько слагаемых, какова степень соответствующего мно-
множителя:
Х 12
Для определения неизвестных постоянных AkiJ Bsj, Dsj прирав-
приравнивают исходную рациональную дробь сумме указанных простейших
дробей и приводят обе части полученного выражения к общему зна-
знаменателю. Выделяя затем коэффициенты при одинаковых степенях х,
приходят к системе линейных уравнений относительно Akii BS^DS-.
Интегралы от наиболее часто встречающихся простейших дробей
находятся по формулам (постоянная интегрирования С опускается):
Для интегрирования неправильной дроби следует при помощи де-
деления с остатком выделить правильную часть. В итоге неправильная
дробь представляется в виде суммы многочлена и правильной дроби,
которые интегрируются отдельно.
Примеры интегрирования рациональных функций.
Пример 1. Вычислить интеграл / dx.
J х3 + 8
7.4. Интегрирование рациональных функций 69
Решение. Представив знаменатель подынтегрального выражения в виде
произведения х3 +8 = (х+2)(х2 — 2а?+4), разложим (правильную) подынтегральную
дробь на сумму простейших:
Зх2 - х - 2 A Bx + D
+
{х+2){х2 -2х + 4) х + 2 ,х2
Приведя сумму дробей в правой части этого равенства к общему знаменателю и
приравняв числитель полученной дроби к числителю исходной дроби, имеем
Зх2 -х-2 = А{х2 - 2х -Ь 4) + (Вх + D){x + 2).
Раскрывая скобки и приравнивая коэффициенты при х2, х и свободные члены
этого тождества, получим систему уравнений для А} В, D:
А + В = 3, -2А + 2Б + D = -1, 4А + 2D = -2.
Находим ее решение: А = 1, В = 2, D. = —3» Поэтому
/Зх2 - х - 2 , /* 1 , [ 2х - 3
dx= dx+ — dx =
х3+8 У^ + 2 J х2 -2х + 4
= 1п|х+2|+ / о dx- / —
1 ' J x2-2x + ± J x2-2
f d(x2-2x + 4) f d(x
2x +
= In \x + 2| + \n(x2 - 2x + 4) \= arctg * * + С
v ' v3 v3
/* 64х4+6зх3
Пример 2. Вычислить интеграл
Решение. Разложим дробь в подынтегральном выражении на сумму про
стейших дробей
Ь^х 4" b$x -f* ^я? 4" Ъ^х 4" 6q
(*-а)><*2 + ^) =
Приведем обе части к общему знаменателю и приравняем коэффициенты при
одинаковых степенях х. В результате получим систему линейных „равнений,
откуда определим постоянные Аг, А2, А3, В, D. Вычисление исходного интеграла
сводится к вычислению четырех интегралов от простейших дробей, для чего
используются формулы, указанные перед первым примером.
Пример 3. Вычислить интеграл / dx.
J "~
Решение. / — dx = / (х + 1 + —— J dx = \x2 + х + In \x - 1| + С.
Некоторые интегралы, приводящиеся к интегралам от рациональ-
рациональных функций, рассмотрены в разд. 7.5, 7.6.
70 Неопределенный интеграл
7.5. Интегрирование иррациональных
функции
> Интегралы, приводящиеся к интегралам от рациональ-
рациональных функций. Интегрирование некоторых иррациональных функ-
функций сводится к интегрированию рациональных функций при помо-
помощи подходящей замены. Далее считается, что R(x, у) — рациональная
функция своих аргументов.
1. Интеграл вида R(x, у/ах -\-b) dx вычисляется с помощью
подстановки z — л/ах -f 6. (Частный случай такого преобразования
использован при решении третьего примера в разд. 7.3.)
2. Интеграл вида R\ х, \ — ) dx вычисляется с помощью
J V V сх + к )
п/ ах + Ь
подстановки z — \\ —.
V сх 4- к
> Применение тригонометрических подстановок. Рассмо-
Рассмотрим интегралы вида / R(x, у/ах2 + Ьх + с) dx.
Функция у/ах2 4- Ьх 4- с при помощи выделения полного квадрата
из подкоренного выражения приводится к одному из следующих
видов (р = — \Ь/а)\
2) yfiy/{x-p)*-q*, a>0;
3) у/^у
В каждом из этих трех случаев применяют различные подстановки:
1) x — p=qtgt, y/(x — pJ 4- q2 = , dx—
cost
2) ж_р= 9 /^—^—^_..-, j._ gsin<<ft
3) x — p= qsint, \Jq2 — (x — pJ = gcos^, dx = qcostdt.
Пример. Вычислить интеграл J \/6 + Ax — 2x2dx.
Решение. Здесь а = — 2 и подынтегральное выражение можно представить в
виде: у/в + Ах - 2х2 = \/2\/3 + 2х - x2dx = ^/2\JА - (х - IJ. Поэтому рассматри-
рассматриваемый интеграл соответствует случаю 3) при р = 1, q = 2. Делая подстановку
х — 1 = 2 sintf, dx = 2 costf dt, последовательно имеем
/ \/6+Ax-2x2dx = Ay/2 / cos2 t dt = 2\/2 I A + cos2t) dt =
= 2\f2t + \/2 sin 2t + С = 2\/2 arcsin -?^— + y/2 sin B arcsin -^—J + С =
2 V 2 У
= 2\/2arcsin X ~ X + —(a; - 1)^4- (a? ~ lJ + C.
7.6. Интегрирование тригонометрических функций 71
> Интеграл от дифференциального бинома / хт(a 4- bxn)pdx
(где а и Ь — постоянные, a n, m, p — рациональные числа) выражается
в элементарных функциях в трех случаях:
1) р — целое число (используется замена х = tr, где г — наимень-
наименьшее общее кратное знаменателей дробей тип);
2) -г целое число (используется замена а-\-Ъхп = ts, где s —
знаменатель дроби р);
3) \. р — целое число (используется замена ах~п 4- Ь = ts,
п
где s — знаменатель дроби р).
7.6. Интегрирование показательных
и тригонометрических функций
> Интегрирование показательных и гиперболических
функций.
1. Интеграл вида / R(enx, emx)dx) где R(x,y) — рациональная
функция своих аргументов, n, m — целые числа, вычисляется с по-
помощью подстановки z = ех. (Частный случай такого преобразования
использован при решении четвертого примера в разд. 7.3.)
2. Интеграл вида / R(shax, chax) dx вычисляется путем перехо-
перехода от гиперболических функций к показательным по формулам
sh ах = \{еах - е~ах), chax = \{еах 4- е~ах)
с последующей заменой z = еах.
> Интегрирование тригонометрических функции.
1. Интегралы вида
/ sin ax cos bxdx, /cos ax cos Ъх dx, / smaxsmbxdx
вычисляются при помощи формул
sinacos/?= y[sin(a +/?)+sin(a —/?)],
cos ol cos /3 — у [cos(a 4- /?) 4- cos(a — /?)],
sin a. sin /3 — у [cos(a — /?) — cos(a 4- /?)].
2. Интегралы вида / sinmxcosnxdx (m, n — целые числа) вычи-
вычисляются следующим образом.
При нечетном m используется замена cos х = z, sinxdx = —dz.
72 Определенный интеграл
При нечетном п — замена sin х — z, cos xdx — dz.
Если обе степени т и п — четные и неотрицательные, то приме-
применяются формулы понижения степени:
sin2 х = уA — cos2#), cos2 x = уA 4- cos2#), sin ж cos ж = у sin2#.
Пример 1. Вычислить интеграл Jsin5xdx.
Решение. Используя тригонометрические формулы, последовательно имеем:
/ sin5 х dx = j (sin2 xJ sin a? dx = — I A — cos2 xJ dcosx =
= - / A - z2J dz = J-23 - \zs - z+C = |- cos3 x - \ cos5 x - cosx + С
Здесь была использована замена z = cosx.
3. Интегралы вида f R(sin x, cos x) dx, где R — рациональная
функция своих аргументов, сводится к интегралам от рациональных
дробей с помощью универсальной тригонометрической подстановки:
х 2dt . 2t 1-t2
^ — tg —, dx — -j-, sin# = - -g-,
, dx
Пример 2. Вычислить интеграл
2 + sinx
Решение. Используя универсальную тригонометрическую подстановку
t = tg —, имеем:
dx f 2dt _ f dt _Г dBt+l)
= f 2dt f dt f dBt
= Warctg ^7T + c = ~k arcts(wtg f + 7f)+ a
Если подынтегральное выражение зависит от sin2 ж, cos2 x или от
tg?, удобнее применять подстановку t = tgx.
8. Определенный интеграл
8.1. Основные определения. Геометрический
смысл определенного интеграла
> Основные определения. Множество упорядоченных точек
{х0, xlf..., хп} таких, что а = xQ < хг < • • • < хп = 6, задает раз-
разбиение отрезка [а, 6] на п отрезков. Разбиение будем обозначать Сп,
а наибольшую из длин Axi = xi — arl_1 отрезков [жг_1,ж1] — через
8.2. Свойства определенного интеграла
73
Л = А(?п) (эту величину называют диаметром разбиения). Пусть на
[а, Ь] задана ограниченная функция у = f(x). Возьмем на каждом от-
отрезке [яг_1,?,] произвольную «опорную» точку ci и составим сумму
п
sn = ^2 /(сг)Джг, которая называется интегральной суммой.
i=i
Если при А(?п) -» 0 существует конечный предел J интегральных
сумм sn, который не зависит ни от вида разбиений ?п, ни от
fb
выбора «опорных» точек, то такой предел обозначается / f(x)dx
Ja
и называется определенным интегралом от функции у = f(x) по
отрезку [а, 6]:
/:
f{x)dx= limsn.
Эта запись означает, что для любого (сколь угодно малого) е > 0 най-
найдется число S > 0 такое, что для всех Сп с диаметром Л < S и для произ-
произвольного множества «опорных» то-
точек будет выполняться неравенство
K-J\<e.
Если / f[x) dx существует, то
J a
функция у — f(x) называется инте-
интегрируемой на отрезке' [а, 6].. Функ-
Функция, непрерывная на [а, 6], интегри-
интегрируема на этом отрезке.
Если а > b и f(x) интегрируема
на отрезке [6, а], то по определению
Рис. 18.
/ f{x)dx = - Г f{x)dx. Kpo
Ja Jb
ме того, полагают
/ f{x)dx = 0.
Ja
> Геометрический смысл определенного интеграла. Если
[Ь
f(x) ^ 0 на [а, 6], то интеграл / f(x)dx равен площади области
J a
D = {а ^. х ^. Ь, О^у^ /(#)} («криволинейной трапеции», рис. 18).
8.2. Свойства определенного интеграла
1. Линейность. Если функции /(ж) и д(х) интегрируемы на от-
отрезке [а, 6], то
rb лЬ лЬ
/ [Af{x)±Bg(x)]dx = A f{x)dx±B g{x)dx
Ja Ja Ja
для любых чисел А и В.
74 Определенный интеграл
2. Аддитивность. Если с Е [а, 6] и функция /(ж) интегрируема на
[а, 6], то
/ f{x)dx = [ f{x)dx + f f{x)dx.
J a J a Jc
3. Теорема об оценке. Если на [а, 6] имеют место неравенства
ш ^ f{x) ^ M, то
/'
J a
f{x)dx^M(b-a).
Пример 1. Из неравенств 2 ^ (х2 + 4I1ъ ^ 5, справедливых на отрезке [2, 11],
Ml
вытекает оценка
Ml
18 $ / (х2 + 4I/3 dx ^ 45.
J2
4. Теорема о среднем. Если /(ж) непрерывна на [а, 6], то найдется
(хотя бы одна) точка с ? (а, 6) такая, что
(число /(с) называется средним значением функции f(x) на [а, 6]).
5. Теорема об интегрировании неравенств. Если на [а, 6] функции
(р(х), f{x), g(x) удовлетворяют неравенствам (р(х) <J f(x) ^ #(ж), то
/Ь pb pb
(р(х) dx ^ f(x) dx ^ g(x) dx
_ J a J a
(в частности, если f{x) ^ 0 на [a, 6], то и Ja f(x) dx ^ 0).
6. Теорема о модуле интеграла. Если f(x) интегрируема на [а, 6],
то функция |/(ж)| также интегрируема, причем
/
J a
f(x)dx
\f{x)\dx.
7. Интегрирование четных и нечетных функций по отрезку вида
[-а,а]:
р+а ра
если f(x) —четная функция, то / f(x) dx = 2 / f(x) dx\
J-a Jo
Г + а
если f(x) —нечетная функция, то / f(x) dx = 0.
J — a
8. Дифференцирование интеграла по переменному верхнему пре-
пределу. Если f(x) непрерывна на [а, 6], то функция Ф(х) = f* f(t)dt
дифференцируема на [а, 6], причем Ф'(х) = f(x). Сказанное удобно
записать в виде равенства
U'mdt)=
8.3. Геометрические приложения определенного интеграла
75
9. Формула Ньютона — Лейбница:
' f(x)dx = F{x) " =F(b)-F(a),
f
J a
где F(x) — какая-нибудь первообразная для функции f(x) на [а, 6].
10. Интегрирование по частям. Если функции и{х) и v(x) имеют
на [а, 6] непрерывные производные, то
/
Ja
u{x)dv{x)= [u{x)v{x)]\b - / v{x)du{x).
11. Замена переменной (подстановка) в определенном интеграле.
Пусть функция f(x) непрерывна на [а, 6], а функция x(t) имеет
непрерывную производную на отрезке [а,/?]. Пусть, кроме того,
множество значений функции x(t) совпадает с [а, 6], причем х(а) = а,
х(/3) = Ь. Тогда
/ f(x)dx= I f(x(t))x'(t)dt.
J a J a
f
Jo
Пример 2. Вычислить интеграл
Решение. Сделаем подстановку х + 1 = t2, dx = 2t dt. При х = 0 имеем t = 1,
а при х = 3 имеем ? = 2. В результате получим
[3 dx = [2
0 (X-8)V^TT Л
2tdt
=
3
t-3
11 2
= — In —.
3 5
8.3. Геометрические и физические
приложения определенного интеграла
> Геометрические приложения определенного интеграла.
1. Площадь области D на плоскости х, у, изображенной на
рис. 19, равна
S= f [f(x)-g(x)]dx
Ja
(при g(x) = 0 эта формула дает пло-
площадь криволинейной трапеции).
2. Площадь криволинейного сек-
сектора. Пусть в полярных координа-
координатах р, (р задана кривая р = f(<p), где
<Р Е [а,/?]. Тогда площадь криволи-
Кх)
76 Определенный интеграл
нейного сектора {а ^ ^> ^ /?; О ^ р ^ /(^)} вычисляется по формуле
3. Площадь поверхности вращения. При вращении кривой
у = /(ж) ^ 0, х ? [а, Ь] вокруг оси х образуется поверхность, площадь
которой
S = 2x [Ь/Ш1+[Г(х)]Чх.
Ja
4. Объем тела вращения. Рассмотрим тело, образованное вра-
вращением вокруг оси х криволинейной трапеции, ограниченной кривой
у = f(x), осью х и прямыми х = а, х = Ь. Его объем
f{x)]2dx.
5. Длина дуги кривой, заданной различными способами.
а) Если кривая является графиком непрерывно дифференцируе-
дифференцируемой функции у = f{x), х G [а, Ь], то ее длина
Ja
[f'(x)]*dx.
б) Если плоская кривая задана параметрически уравнениями
х = x(t), у = y(t) (где t ? [а, /?], a x(t) и ?/(?) —непрерывно дифферен-
дифференцируемые функции), то ее длина
в) Если кривая задана в полярных координатах р, (р уравнением
р = р(<р), <р в [а,/?], то ее длина
> Физические прилолсения определенного интеграла.
1. Работа переменной силы. Пусть по оси х от точки х = а до
точки х = Ь движется материальная точка, на которую действует
переменная сила F(x), направленная вдоль оси х. Работа этой силы
[Ь
равна Л = I F(x) dx.
Ja
2. Масса стержня переменной плотности. Пусть стержень с
постоянной площадью поперечного сечения S занимает на оси х
отрезок [0,1], а плотность материала стержня есть функция от х:
= у(х). Масса такого стержня равна т
Г1
= 5 / у(х) dx.
Jo
8.4. Несобственные интегралы 77
8.4. Несобственные интегралы
*> Интегралы с бесконечными пределами. Пусть функция
у = f[x) определена и непрерывна при а ^ х < +оо. Бели существует
конечный предел Km J f(x) dx, то его называют (сходящимся) не-
6—f+OO
собственным интегралом от f(x) на интервале [а, +оо] и обозначают
fa °° f(x) dx. Таким образом, по определению
Л+ОО
Л+ОО гЬ
/ f(x)dx= Km / f(x)dx.
Ja 6-*+°° Ja
Если указанный предел бесконечен или не существует, то несобствен-
несобственный интеграл называют расходящимся.
Геометрический смысл несобственного интеграла заключается
в том, что Ja °° f(x) dx (при f(x) ^ 0) равен площади неограниченной
области, заключенной между линиями у = f{x), x = а и осью абсцисс.
Аналогичным образом определяются несобственные интегралы
для других бесконечных интервалов:
' —ОО
г+оо лс г+оо
/ f(x)dx= f(x)dx+ f(x)dx
J — oo •/—oo Jc
(если каждый из несобственных интегралов, стоящих в правой части
последнего равенства, сходится, то по определению сходится и инте-
интеграл, стоящий в левой части).
Пример 1. Непосредственным вычислением показывается, что несобствен-
ныи интеграл / -— расходится, если а < 1, и сходится, если а > 1; в последнем
Л *а
случае его значение равно 1/(а — 1).
> Достаточные условия сходимости несобственных инте-
интегралов. Во многих задачах достаточно установить, сходится или рас-
расходится заданный несобственный интеграл, и оценить его значение в
случае сходимости. Для этого бывают полезны следующие теоремы.
Теорема 1. Если 0 ^ f(x) ^ <р(х) при х ^ а, то из сходимости
интеграла Ja °° <p(x) dx следует сходимость интеграла f*°° f(x) dx,
причем Ja °° f(x) dx ^ fa°° <p(x) dx. Бели же интеграл fa °° f(x) dx
расходится, то и интеграл Ja °° <p(x) dx расходится.
Теорема 2. Если интеграл f*°°\f(x)\dx сходится, то сходится и
интеграл fa °° f(x) dx (в этом случае последний интеграл называется
абсолютно сходящимся).
78Определенный интеграл
Пример 2. Несобственный интеграл / —— dx сходится абсолютно, так
sin x
X2 '
/ sin:
n
а интеграл / ——¦ dx сходится (см.
как справедливо неравенство
пример 1).
> Интегралы от неограниченных функций. Пусть функ-
функция f(x) определена и непрерывна при а ^ х < 6, но lim f(x) = оо.
Если существует конечный предел lim Ja f(x) dx, то он называется
(сходящимся) ^несобственным интегралом от неограниченной функ-
функции f(x) по отрезку [а, 6]. Таким образом, по определению
fbf(x)dx= lim Г f{x)dx.
Если конечного предела не существует, то интеграл называется
расходящимся.
Если lim f(x) = оо, то по определению полагают
,6 ,6
/ f{x)dx= Um / f{x) dx.
Наконец, если f(x) не ограничена в окрестности некоторой точки
с G (а, Ь) и каждый из интегралов /дс f(x) dx и /с f(x) dx сходится, то
по определению
гЬ пС гЬ
/ f(x)dx= / f(x)dx+ / f(x)dx.
J a J a J с
Геометрический смысл несобственного интеграла от неограни-
неограниченной функции, а также теоремы типа теорем 1 и 2 (см. выше) для
таких интегралов полностью аналогичны таковым для несобствен-
несобственных интегралов с бесконечными пределами. В качестве функций, с
которыми обычно сравнивают функции, стоящие под знаком несоб-
несобственного интеграла, в данном случае берут 1/(х — а)м; несобствен-
несобственный интеграл / г— сходится при fi < 1 и расходится при и ^ 1.
Л \х - аг
о Гь dx
Это утверждение относится и к интегралам вида L —.
Ja \Р ~~ х)
Пример 3. Несобственный интеграл / сходится и не
Jx (х - \J + у/х - 1
1 1 С dx
превосходит 2, так как — , < , , а интеграл
(х - IJ + л/х - 1 у/х - 1
сходится и равен 2.
называется
9.1. Определение и свойства двойного интеграла 79
9. Двойные и тройные интегралы
9.1. Определение и свойства двойного
интеграла
> Определение и свойства двойного интеграла. Пусть на плос-
плоскости задано ограниченное множество, которое можно поместить в
некоторый круг минимального диаметра. Диаметр этого круга назы-
называется диаметром множества. Рассмотрим область D на плоскости
х, у. Разобьем D на п непересекающихся частей (ячеек). Максималь-
Максимальный из диаметров ячеек называется диаметром разбиения и обо-
обозначается Л = A(X>n) (Vn —разбиение области D на ячейки). Пусть
в области D задана функция z = f{x)y). Выберем в каждой ячейке
по произвольной «опорной» точке (ж,-,у,-) (* = 1, 2, ..., га) и соста-
п
вим интегральную сумму sn = ]Р 1{Х%^У%) AS,-, гДе AS,-— площадь
г-й ячейки.
Если существует конечный предел сумм sn при А -» 0 и этот
предел J не зависит ни от вида разбиений Х>п, ни от выбора
«опорных» точек, то он обозначается // f(x,y)dxdy и
D
двойным интегралом от функции f(x,y) по области D:
f{x,y)dxdy=hmQSn.
D
Это означает, что для любого е > О найдется S > 0 такое, что для
всех разбиений Vn таких, что А(Х>П) < 8) и любого выбора «опорных»
точек будет выполняться неравенство \sn — J\ < е. (Если f(x,y)
непрерывна в замкнутой области D, то она интегрируема по этой
области, т.е. двойной интеграл JJ /(ж, у) dx dy существует,)
D
> Свойства двойного интеграла.
1. Линейность. Если функции f(x,y) и д(х,у) интегрируемы по
области D, то
// [af{x, у) ± Ьд(х} у)] dx dy = a // f(x, у) dxdy±b 11 д(х, у) dx dy,
D D D
где а и 6 — некоторые числа.
2. Аддитивность. Если f(x,y) интегрируема по каждой из обла-
областей ^ и D2, не имеющих общих внутренних точек, то
// /(#, У) dx dy - II f(x, у) dx dy + // /(ж, у) dx dy.
D ?>! D2
80 Двойные и тройные интегралы
3. Теорема об оценке. Если в области D выполняются неравенства
™ ^ /(*, У) ^ М, то
D
где S — площадь области D.
4. Теорема о среднем. Если /(х, у) непрерывна в области Д то
найдется хотя бы одна внутренняя точка (х, у) ? D такая, что
f(x,y)dxdy=z f(x,y)S.
D
Число f(x,y) называется средним значением функции в области D.
5. Интегрирование неравенств. Если <р(х,у) ^ /(#,у) ^ #(#,у) в
области D, то
// У>(*, У) dx dy ^ // /(х, у) dx dy ^ // g(x, у) dx dy.
D D D
В частности, если /(х, у) ^ 0 в D, to ff /(х, у) dx dy ^ 0.
D
6. Теорема о модуле интеграла:
\JJf(x,y)dxdy ^JJ\f(x,y)\dxdy.
D D
> Геометрический смысл двойного интеграла. Пусть функ-
функция /(х, у) неотрицательна при (х, у) ? D. Тогда двойной интеграл
ff /(х, у) dx dy равен объему цилиндрического тела, основанием кото-
D
рого служит область D плоскости z = 0 и которое сверху ограничено
поверхностью z = /(x, у).
9.2. Вычисление двойного интеграла
> Использование повторных интегралов.
1. Бели область D на плоскости х, у задается неравенствами
а ^ х ^ 6, уг(х) ^ у ^ j/2(x) (рис. 20, а), то
fff(x,y)dxdy= [ dx Г* f{xyy)dy.
JJ Ja *'yi(«p)
D
Интеграл в правой части этой формулы называется повторным.
2. Если D = {с ^ у ^ </, хг(у) ^ х ^ х2(г/)} (рис. 20, б), то
ff fd ГЫУ)
f(Xiy)dxdy= dy f{x,y)dx.
JJ Jc Jx^y)
В общем случае область D разбивают на области указанных типов
с последующим использованием свойства аддитивности двойного
интеграла.
9.3. Геометрические приложения двойного интеграла
81
Ъ х
Рис. 20.
> Замена переменных в двойном интеграле. Пусть непрерыв-
непрерывно дифференцируемые функции х — х(и, v), у — у(и, v) взаимно одно-
однозначно отображают область Dx плоскости и, v на область D плоско-
плоскости х, у, а функция f(x,y) непрерывна в D. Тогда
11 f(x,y)dxdy= I f(x(u,v), y(u,v))\J(U)v)\dudv,
где J(u,v) =
якобиан отображения Dl на D.
Для отображения х — pcos<p, у = psin<p (которое часто исполь-
используется и соответствует переходу от декартовых координат ж, у к
полярным координатам р, <р) якобиан J(p, <p) = р.
9.3. Геометрические и физические
приложения двойного интеграла
> Геометрические приложения двойного интеграла.
1. Площадь области D на плоскости х, у:
S = II dx dy.
D
2. Площадь поверхности, заданной уравнением z — f(x,y) для
(ж, у) ? D (рассматриваемая поверхность проектируется в область
D на плоскости ж, г/), находится по формуле
82 • Двойные и тройные интегралы
3. Площадь поверхности, заданной векторным уравнением г —
- r(u, v) = х(и, v)i + y{u, v)j + z(u, v)k, где (и, v) G Dx:
S = JJ\n{u,v)\i
\dudv.
Здесь вектор нормали вычисляется по формуле п(и, v) = г„ х r'v.
4. Вычисление объемов. Если область U трехмерного простран-
пространства задается условиями {(х, у) ? Д /(ж, у) ^ z ^ ^(х, у)} (D — неко-
некоторая область на плоскости х, у), то ее объем равен
V = II Ых> У) ~ Яж' У)] dx dV-
D
Рассматриваемая трехмерная область U представляет собой цилин-
цилиндрическое тело, которое снизу ограничено поверхностью z — f{x)y))
а сверху — поверхностью z — g(x, у). Боковая поверхность этого тела
состоит из отрезков прямых, параллельных оси z.
> Физические приложения двойного интеграла. Далее счи-
считаем, что плоская пластина занимает область D плоскости ж, у, а
*у(х,у) —поверхностная плотность материала пластины (для одно-
однородной пластины 7 = const).
1. Масса плоской пластины:
¦= // l{x,y)dxdy.
m
D
2. Координаты центра тяжести плоской пластины:
1 ГГ / х , , 1 [[ , ч ," ,
7* nz — I I T'Vl 7* 7/1 /7 7* /77/ 7/ — —— I I II^Jl 7* 7/1 /7 7* /77/
m Л )г/у ^' ^c m JJ *iy '*'
D D
где m — масса пластины.
3. Моменты инерции плоской пластины относительно коорди-
координатных осей:
1Х— Ц y2i(x)y)dxdy) I - x2j(x,y)dxdy.
JJ * у JJ
D D
Момент инерции пластины относительно начала координат вычисля-
вычисляется по формуле /0 = 1Х + 1у.
9.4. Определение и свойства тройного
интеграла
> Определение тройного интеграла. Пусть функция f(x,y,z)
определена в некоторой области U пространства. Разобьем U на
9.4. Определение и свойства тройного интеграла 83
п частей (ячеек), не имеющих общих внутренних точек; обозна-
обозначим через А = \{Ип) диаметр полученного разбиения Ып) т.е. мак-
максимальный из диаметров ячеек (диаметром области в простран-
пространстве называется диаметр минимального шара, содержащего эту
область). Выберем в каждой из ячеек по произвольной «опорной»
точке (x2-,yt, zt) (г = 1,2, ..., п) и составим интегральную сумму
п
sn = J2 f(xi)Vi) zi) ДК"> ГДе А К' —объем г-й ячейки. Если существу-
2 = 1
ет конечный предел сумм sn при Х{Кп) —> 0 (не зависящий ни от вида
разбиенияUn, ни от выбора «опорных» точек), то он называется трой-
тройным интегралом от функции /(ж, у, z) по области U и обозначается
/(ж, у) z) dx dy dz = lim sn.
и
> Свойства тройного интеграла. Свойства тройных интегралов
аналогичны свойствам двойных интегралов.
1. Линейность. Если функции f(x,y,z) и g(x,y,z) интегрируемы по обла-
области U, то
fff [af(x, у, z) ± bg(x, у, -г)] dx dy dz =
U
= a ffjf(x, у, z) dx dydz ±b fffg(x, y, z) dx dy dz,
и и
где а и b — некоторые числа.
2. Аддитивность. Если f(x,y,z) интегрируема по каждой из областей U1
и С/2, не имеющих общих внутренних точек, то
fff f{x, 2/, z) dx dy dz = /// /(*, 2/, z) dx dy dz + /// /(яг, у, z) dx dy dz.
U Ui U2
3. Теорема об оценке. Если в области U выполняются неравенства
mV ^ fff f(x, у, z) dx dy dz <J MV,
U
где V — объем области U.
4. Теорема о среднем. Если f(x,y,z) непрерывна в области С/, то найдется
хотя бы одна внутренняя точка (х, y,z) ? U такая, что
fff /(*, V,z) dx dy dz = f(x,y,z) V.
U
Число f(x,y, z) называется средним значением функции в области U.
5. Интегрирование неравенств. Если <p(x,y,z) ^ f(x,y,z) ^ g(x,y,z) в обла-
области U, то
fff (p(x,y,z)dx dydz ^ fff f(x,y,z)dxdydz ^ fff g(x,y,z) dx dy dz.
и и и
6. Теорема о модуле интеграла:
\ffff(x,y,z)dxdydz $fff\f(x,y,z)\dxdydz.
84 Двойные и тройные интегралы
9.5. Вычисление тройного интеграла.
Некоторые приложения
> Использование повторных интегралов.
1. Рассмотрим тело ?/, ограниченное сверху поверхностью
z = #(х, у), а снизу — поверхностью z = /г(х, у), проекцией которого
является область D на плоскости х, у. Другими словами, область U
задается условиями {(х,у) ? D, h(x,y) ^ z ^ д{х,у)}. Тогда
иI f(x)y,z)dxdydz = // dxdy / f{x,y,z)dz.
U D h(x,y)
2. Если область D плоскости х, у описывается неравенствами
{а ^ х ^ 6, Ух(х) ^ у ^ 2/2(х)}> то
Ь У2(а?) Sr(^,J/)
/// /(ж, У у z) dx dydz- I dx I dy I /(x, y, z) dz.
> Замена переменных в тройном интеграле. Пусть непре-
непрерывно дифференцируемые функции х = x{u,v,w), у = y(u,v,w),
z = z(w, v, u>) осуществляют взаимно однозначное отображение обла-
области Q пространства u, v, w; на область U пространства х, у, z, a
функция /(х, у, z) непрерывна в области [/. Тогда
f(xiyiz)dxdydz =
= HI f{x(u,v,w), y(u,v,w), z(u,v,w)) \J\u,v ,w)\ du dv dw,
где
**w
Уи i/v l/w
z' z' z'
— якобиан отображения U на U.
Для цилиндрических координат р, (р, z, связанных с декартовыми
координатами формулами х = pcos<pyy = psin(p,z = z, якобиан J = p.
Для сферических координат р, (р, в имеем х = pcos<p sin0,
у = psimp sin 0, z = pcos в, а якобиан J = p2 sin 0.
> Некоторые геометрические и физические приложения
тройного интеграла.
1. Объем области U:
-Ш
dxdydz.
и'
10.1. Криволинейный интеграл первого рода 85
2. Масса тела переменной плотности у = у(х, у, z), занимающего
область U:
и
3. Координаты центра тяжести тела:
хс-— x~/dxdydz, yc-— y~/dxdydz, zc-— zfdxdydz.
и и и
4. Моменты инерции тела относительно координатных осей:
h - \\\ p\zl dx dy dz, Iy= /// р2хгч dx dy dz, Iz = /// p2xy~/ dx dy dz,
и и и
где p2yz = у2 + z2, p2xz = x2 + z2, p2xy = x2 + y2.
В случае однородного тела в формулах следует положить
7 = const.
10. Криволинейные и поверхностные
интегралы
10.1. Криволинейный интеграл первого рода
> Определение криволинейного интеграла первого рода.
Пусть на кусочно гладкой кривой АВ определена функция f(x,y,z).
Выбор на дуге АВ точек А = Мо, Мх, М2, • •., Мп = В зада-
задает разбиение Сп. Максимальная из длин хорд М0МХ) МХМ2, ...,
Мп_1Мп называется диаметром разбиения и обозначается А = Л(?п).
На каждой из дуг М{-1М{ выберем произвольную «опорную» точ-
точку (х{)у{)г{) (г = 1, 2, ...,п) и составим интегральную сумму
sn = Е/(Ж1;> %> zi) д'|> ГДе д'| — Длина дуги М{_гМ{.
Если существует конечный предел сумм sn при А(?п) —> 0 (не за-
зависящий ни от вида разбиений ?п, ни от выбора «опорных» точек), то
он называется криволинейным интегралом первого рода по дуге АВ
и обозначается
Г f(x,y,z)dl =
/
АВ
Если функция f(x,y,z) непрерывна, то криволинейный интеграл
существует. Криволинейный интеграл первого рода не зависит от
направления движения вдоль АВ] его свойства аналогичны свойствам
определенного интеграла.
86 Криволинейные и поверхностные интегралы
> Вычисление криволинейного интеграла первого рода.
1. Если плоская кривая задана в виде у = у(х), х ? [а, 6], то
ь
f(x,y)dl = J f(x,y(x))^l + (y')Ux.
АВ а
2. Если дуга АВ задана параметрически уравнениями х = x(t),
y=y(t), z = z{i),te[a,р],то
Р
J f(x,yfz)dl = J
АВ
Аналогичная формула имеет место для функции f[x) y)) определенной
на плоской кривой х — x(t), у = y(t), t ? [a,/?].
> Приложения криволинейного интеграла первого рода.
1. Масса'материальной кривой АВ с заданным законом измене-
изменения линейной плотности 7 = у{х, У, *)'-
т = I 7 dl.
АВ
2. Координаты центра тяжести материальной кривой АВ:
АВ АВ АВ
Постоянной плотности соответстует 7 = const.
10.2. Криволинейный интеграл второго рода
> Определение криволинейного интеграла второго рода.
Пусть в некоторой области пространства задано векторное поле
a(x,y^j) = P(x,y,z)i + Q(x,y,z)j + R(x,y,z)k и кусочно гладкая кри-
кривая АВ. Задавая на кривой точки А = Мо, М1з М2, ..., Мп = В,
получим ее разбиение Сп. Выберем на каждой из дуг Mi_1Mi по про-
произвольной «опорной» точке (жг-, у{, z{) (г = 1, 2,...., п) и составим сум-
сумму скалярных произведений sn = J2 3(?2-, y{i z{) • М{_ХМ{, называемую
2 = 1
интегральной суммой.
Если существует конечный предел сумм sn при А(?п) -> 0 (не
зависящий ни от вида разбиений ?п, ни от выбора «опорных» точек),
то он называется криволинейным интегралом второго рода от поля
а(х) у) z) вдоль кривой АВ и обозначается
I а • df или / Р dx + Q dy + Rdz.
АВ АВ
10.2. Криволинейный интеграл второго рода 87
Криволинейный интеграл второго рода зависит от направления
движения вдоль кривой, а именно: / а • dr — — J a dr.
АВ ВА
Интеграл по замкнутому контуру С называется циркуляцией по-
поля а вдоль С и обозначается
ф а ¦ dr.
с
Физический смысл криволинейного интеграла второго рода:
f а • dr определяет работу силового поля а(х, у, z) при перемещении
АВ ^ '
единичной массы вдоль дуги АВ.
> Вычисление криволинейного интеграла второго рода.
1. Для плоской кривой, заданной в виде у = у(х), х ? [а, 6], и
плоского поля
ъ
J
АВ
= J[P(x,y(x))+Q(x,y(x))y'(x)]dx.
2. Пусть АВ задана векторным уравнением г — r(i) = x(t)i
, te [a,0\. Тогда
a-df= Pdx + Qdy+Rdz =
АВ АВ
= / [P(*(t)f y{t),z(t))x'{t) + Q (*(t), y(t), z(t))y'(t) + R(x(t), y(t),z(t))z'(t)] dt.
a
Аналогичная формула имеет место для плоской кривой АВ и плоского
поля а.
> Потенциал и ротор векторного поля. Поле а = a(x,y,z) на-
называется потенциальным, если существует функция Ф[х)у) z) такая,
что
_ дФ -* дФ -> дФ 7
a = gradФ, т.е. а = ——г -h -^—J + -^—лг.
ох оу oz
Функция Ф(#, у) z) называется потенциалом векторного поля а. Кри-
Криволинейный интеграл второго рода от потенциального векторного
поля вдоль дуги АВ равен приращению потенциала вдоль этой дуги:
/
АВ
а • dr = Ф В~Ф\А •
88 Криволинейные и поверхностные интегралы
Ротором векторного поля a(x,y,z) = Pi + Qj + Rk называется
вектор
rota:
_ (8R 8Q\r f дР dR\t fdQ dP\r
dy dzj \dz dxJJ \dx dy J
i j к
д д д
дх ду dz
Р Q R
> Необходимые и достаточные условия потенциальности
векторного поля. Пусть U — односвязная область в пространстве
(т.е. такая область, в которой любой замкнутый контур можно
стянуть в точку, не выходя за цределы U) и а (ж, у, z) — векторное поле
в области U. Тогда следующие четыре утверждения равносильны:
1) поле а потенциально;
2) rot а = б ;
3) циркуляция поля по любому замкнутому контуру С ? U равна
нулю, т.е. § а • dr — 0;
с w
4) / а • dr не зависит от формы кривой АВ ? U (а зависит только
ав,
от ее начальной и конечной точек).
10.3. Поверхностный интеграл первого рода
> Определение. Пусть в точках гладкой поверхности D задана
функция /(ж, t/, z). Произведем разбиение Vn этой поверхности на
п ячеек, не имеющих общих внутренних точек. Диаметром раз-
разбиения А(Х>П) называется максимальный из диаметров ячеек (см.
разд. 9.4). Выберем в каждой из ячеек произвольную «опорную»
точку (х^у^г{) (г = 1, 2, ..., п) и составим интегральную сумму
п
sn = H f(xi' Ун zi) &si> ГДе &si — площадь г-й ячейки.
Если существует конечный предел сумм sn при А(Х>П) -> 0 (не за-
зависящий ни от вида разбиений Т>п, ни от выбора «опорных» точек), то
он называется поверхностным интегралом первого рода от функции
/(ж, t/, z) и обозначается JJ /(ж, t/, z) dS.
D
> Вычисление поверхностного интеграла первого рода.
1. Если поверхность D задана уравнением z = z(x,y), (x,y)eD1,
то
JJ f(x, у, z)dS = jj f{x, у, г(х, у)) yjl + DJ + КJ dx dV-
D Dx
2. Если поверхность D задана векторным уравнением г =
= г(ж, t/, z) - х{и, v) г + у{и, v) j + z(u, v) к, (г/, v) G D2) то
// f{x,y,z)dS = // /(ar(u, v), y(n, v), 2r(n, v)) |n(n, v) |
D D2
10.4. Поверхностный интеграл второго рода ' 89
где n(u,v) = r^ х r*v— вектор нормали к поверхности.
> Приложения поверхностного интеграла первого рода.
1. Масса материальной поверхности D с поверхностной плотно-
плотностью 7.-= 1f{x,y,z)'-
= I -y{x,y,z)clS.
т
D
2. Координаты центра тяжести материальной поверхности D:
D D D
Постоянной поверхностной плотности соответствует 7 — const.
10.4. Поверхностный интеграл второго рода
> Определение. Пусть D — ориентированная поверхность, задан-
заданная уравнением г = r(u, v) = x(u,v) i + y(u,v) j + z(u,v) к (и и v — па-
параметры) . Ориентированность означает, что в каждой точке М ? D
к поверхности восставлена нормаль п(М) =z n(t/,v), непрерывно за-
зависящая от М. Возможны два случая: а) поверхность ориентирова-
ориентирована нормалью n{u,v) — г*и х г^; б) поверхность ориентирована норма-
нормалью, противоположной указанной. (Поверхность, заданную уравнени-
уравнением z = z(x, у), можно записать в векторном виде следующим образом:
r = r(xiy) = xi + yj + z(x,y)k.)
Пусть векторное поле а (ж, у, z) = Pi + Qj + Rk задано на глад-
гладкой ориентированной поверхности D. Произведем разбиение Т>п по-
поверхности D на п частей (ячеек), не имеющих общих внутренних
точек. Выберем в каждой из ячеек произвольную «опорную» точ-
точку Mi(xiiyiizi) (г = 1,2,...,п) и составим интегральную сумму
п
sn = ^2 a(xit уг, Zj) • п® Д5г-, где AS{ — площадь г-й ячейки, а п? —
*=1
единичный вектор нормали к поверхности в точке Mi, направленный
в соответствии с выбранной ориентацией поверхности.
Если существует конечный предел сумм sn при А(Х>П) -> 0 (не
зависящий ни от вида разбиений Vn) ни от выбора «опорных» точек),
то он -называется поверхностным интегралом второго рода (или
потоком векторного поля а через ориентированную поверхность D)
и обозначается
// а(х} y,z) -d$ или Pdydz + Qdx dz + Rdx dy.
D D
Отметим, что при изменении ориентации поверхности поверхност-
поверхностный интеграл второго рода меняет знак.
90 Криволинейные и поверхностные интегралы
> Вычисление поверхностного интеграла второго рода.
1. Если поверхность D задана векторным уравнением ?= г(г/,г>),
(u,v) в ?>1з то
// a(x,y,z) d§ = ± a(x(u,v),y(u,v),z(u,v)) • n(u,v) dudv.
D Di
Знак плюс берется в случае, когда поверхность ориентирована нор-
нормалью n(u,v) = r^ х rlv) знак минус — в противоположном случае.
2. Если поверхность D задана уравнением z = z(x, у), (ж, у) ? D2)
то нормаль п(ж, у) — ?х х? — -~z'xi—z'yj+k ориентирует поверхность D
«вверх», в направлении оси z. Тогда
JJа ¦ d$ = ± JJ(-z'xP - z'yQ + R) dxdy,
D D2
где P = P{x)y)z(x,y))) Q = Q(xiyiz(xiy))i R = R{x,y,z(x,y)). Знак
плюс берется в случае ориентации поверхности «вверх», знак минус —
в противоположном случае.
10.5. Дифференциальные операции
и интегральные формулы теории поля
> Формула Остроградского — Гаусса. Пусть векторное поле
а(ж, y,z) = P(x, у, z) i + Q(x, у, z) j + R(x, y, z) к непрерывно дифферен-
дифференцируемо в пространственной области ?/, a D — граница этой обла-
области, ориентированная внешней нормалью. Тогда справедлива форму-
формула Остроградского — Гаусса
(Iad$= HIdiv a dxdydz,
где дивергенция вектора а определяется следующим образом:
... ЭР dQ , 8R
diva = -т— + -т— + -5—.
дх ду dz
Таким образом, поток векторного поля через замкнутую поверхность
наружу равен тройному- интегралу от дивергенции поля по объему,
ограниченному этой поверхностью. В координатной форме формула
Остроградского — Гаусса имеет вид
(IPdydz + Qdxdz + Rdxdy = JJJ (^ + ^ + <^pj dxdydz.
D
10.5. Дифференциальные операции и интегральные формулы 91
> Формула Стокса. Пусть поле a(x,y,z) непрерывно дифферен-
дифференцируемо в некоторой области пространства, содержащей ориентиро-
ориентированную поверхность D. Ориентация поверхности однозначно опреде-
определяет направление обхода границы С этой поверхности: если смотреть
с конца выбранного вектора нормали к Д то обход границы С дол-
должен казаться происходящим против хода часовой стрелки. При этом
циркуляция поля вдоль С равна потоку вектора rot а через D:
(badr=
TotadS.
В координатной форме формула Стокса имеет вид
Pdx + Qdy + Rdz =
= // "Б JT dydz+[ — —)dxdz+[ -^---^-) dx dy.
JJ \ ду dz J \ dz дх ) \ дх ду J
D
> Формула Грина. Для плоского поля а(х) у) = P(x}y)i + Q(x, у) j
из формулы Стокса получается формула Грина:
С D
где контур С области D на плоскости ж, у проходится против часовой
стрелки.
> Оператор Гамильтона и дифференциальные операции
первого порядка. Оператором Гамильтона или набла-вектор ом на-
называется символический вектор
„ г д -г д 7 д
С его помощью можно кратко записать следующие дифференциаль-
дифференциальные операции:
1) градиент скалярной функции и{х,у, z):
- ди -? ди г ди _
2) дивергенцию векторного поля а = Р г + Q j + Rk :
J. . дР dQ dR ^ _
дх ду dz
(скалярное произведение набла-вектора на вектор а);
92 Ряды
3) ротор векторного поля а = Pi + Qj + Rk:
rota =
• j к
д д д
дх ду dz
Р Q R
= V х а
(векторное произведение набла-вектора на вектор а).
Каждое скалярное поле и(х,у, z) порождает векторное поле
gradu. Векторное поле а(х, у, z) порождает два поля: скалярное diva
и векторное rot a.
> Векторные дифференциальные операции второго поряд-
порядка. Имеют место следующие дифференциальные соотношения:
.ч ,. 1 л д2и д2и д2и
1) divgradu = Au = -r-7r + -r-z- + -r-z-, где А— оператор Лапласа
ох1 оуг ozz
(Аи = V-(Vti) = V2i/);
2) rotgradu = б (или (V х V) и = б);
3) divrot а = 0 (или V • (V х а) = 0);
4) rot rot a = grad div a — AS.
11. Ряды
11.1. Числовые ряды
> Основные определения. Пусть {ип} —последовательность чи-
чисел. Выражение
оо
ип
п=1
называется числовым рядом, ип — общим членом ряда, а сумма
sn = их +и2 + • • "\-ип — п-й частичной суммой ряда. Если существует
конечный предел lim sn — 5, то ряд называется сходящимся, a S —
п—>оо
оо
суммой ряда. При этом пишут J^ un = S. Если lim s не существует
п = 1 п">о°
(или равен бесконечности), то ряд называется расходящимся. Ряд
ип+\ + ип+2 + ип+г + * *' называется п-^« остатком ряда.
оо
Пример 1. Ряд ^ aqn~l = а + aq + aq2 + • • •, члены которого образуют
п= 1
геометрическую прогрессию со знаменателем д, сходится, если \q\ < 1 (при этом
его сумма 5 = -fz~)» и расходится, если |д| ^ 1.
оо
> Необходимый признак сходимости ряда. Если ряд ^ ип
п = 1
сходится, то lim г/п = 0 (если lim и ф 0, то ряд расходится).
п—>оо п—>оо
11.1. Числовые ряды 93
Пример 2. Ряд Y2 cos IT расходится, так как его общий член ип = cos -^- не
п=1
стремится к нулю при п —> оо.
Необходимый признак сходимости не является достаточным.
оо
Пример 3. Рассмотрим ряд ^ ТТ^- Хотя его общий член стремится к
п=1
1 оо
нулю: lim —-= = 0, но ряд V] -4= расходится, так как его частичные суммы
П-ЮО у/П ^?. У*П
1 l" 1 '. 1 ' /_
не ограничены: sn = —j= -\ -=¦ + • • • -\ j= > п—-= = уп —>• оо при п —У оо.
V1 у/2 у/п у/п
> Свойства сходящихся рядов.
1. Если ряд сходится, то сходится и любой его остаток. Отбра-
Отбрасывание или добавление конечного числа членов к данному ряду не
влияет на его сходимость.
2. Если все члены ряда умножить на некоторое число, то сходи-
сходимость ряда не нарушится (а сумма ряда умножится на это число).
оо оо
3. Если ряды Y1 ип и Yl vn сходятся и имеют суммы S^ и S2
п=1 п=1
оо 4 ,
соответственно, то сходятся и ряды J^ {ип ± vn), а их суммы равны
п=1
5Х±52.
4. Члены сходящегося ряда можно группировать в порядке сле-
следования; получающийся ряд сходится и имеет ту же сумму. Иными
словами, в сходящемся ряде можно произвольным образом расста-
расставлять скобки; обратное действие — раскрытие скобок — допустимо
не всегда: так, ряд A — 1) + A — 1) + • • • сходится (и имеет сумму,
равную нулю), но если раскрыть скобки, то получится расходящийся
ряд 1 — 1 + 1 — ! + ••• (его общий член не стремится к нулю).
оо
> Критерий Коши сходимости ряда. Чтобы ряд ^2 ип сходил-
'.. гг=1
ся, необходимо и достаточно, чтобы для любого е > 0 нашелся такой
номер N = N(e), что для всех п > N и любого натурального к выпол-
выполнялось неравенство |wn+1 H Ь ип+к\ < е-
> Признаки сходимости рядов с положительными членами.
1. Первый признак сравнения. Если 0 ^ ип ^ vn (начиная с некото-
оо
рого номера п), то из сходимости ряда ?^ vn следует сходимость ряда
п = 1
оо
п=1
ип, а из расходимости ряда J2 ип — расходимость ряда J2 vn •
п—1 п = 1
2. Второй признак сравнения. Если существует конечный предел
оо оо
lim (un/vn), отличный от нуля, то ряды J2 ип и J2 vn сходятся или
п-юо
расходятся одновременно.
п=1 п=1
94 Ряды
3. Признак Даламбера. Если существует lim (un+i/un) = А то
П —УОО
оо
при D < 1 ряд Y1 ип сходится, а при D > 1 —расходится. При D = 1
п = 1
признак Даламбера не дает ответа на вопрос о сходимости данного
ряда.
4. Признак Коши. Если существует lim л"г/Т = К. то при if < 1
n->oo v
оо
ряд ^2 ип сходится, а при К > 1 — расходится. При if = 1 признак
п = 1
Коши не дает ответа на вопр,ос о сходимости данного ряда.
5. Интегральный признак Маклорена —Коши. Пусть f(x)—нео-
f(x)—неотрицательная невозрастающая функция, непрерывная на интервале
1 ^ х < +оо и такая, что /A)"= их, /B) = м2, • • •, f{n) = txn, ...
оо
Тогда для сходимости ряда ^2 ип необходимо и достаточно, чтобы
п=1
оо
сходился несобственный интеграл f f(x) dx.
i
оо
Пример 4. Ряд* Y2 7Г = * + \ "*" "з" "^ '' ' РасхоДится» так как расходится
п=1
СХ)
несобственный интеграл \ ~ cfa:. Аналогично устанавливается, что ряд ^ •—-
п=1
сходится при а>1и расходится при а ^ 1.
> Ряды с произвольными членами. Признак сходимости
оо
Лейбница. Пусть знаки членов ряда ^ ип чередуются, абсолют-
п = 1
ные величины членов не возрастают с ростом п и lim ип = 0. Тог-
п->оо
да данный «знакочередующийся» ряд сходится (признак Лейбница).
Если при подсчете суммы S такого ряда ограничиться частичной
суммой sn1 а остальные члены ряда отбросить, то погрешность, воз-
возникающая при замене S на sn) не превосходит по абсолютной вели-
величине модуля первого из отброшенных членов (и имеет одинаковый с
ним знак).
Пример 5. Ряд 1 — Н — Н сходится по признаку Лейбница.
22 З3 44 55
Если положить 5 й s4 = 1 — -\ —, то допущенная при этом погрешность
z о 4
положительна и не превосходит и5 = —- — 0,00032.
оо
> Абсолютная и условная сходимость. Ряд Y1 ип с произволь-
п=1
ным чередованием знаков его членов называется абсолютно сходя-
оо
щимся, если сходится ряд ^2 \ип\- (Абсолютно сходящийся ряд схо-
п = 1
дится.)
Этот ряд называется гармоническим.
11.2. Функциональные ряды 95
Пример 6. Ряд 1 Н — -\ — -\ • • • сходится абсолютно,
00 1
так как ряд, составленный из модулей членов данного ряда, У^ ——-, сходится
п=1
(см. ряд примера 4 при а — 2).
оо
Сходящийся ряд ^2 ип называется условно сходящимся, если ряд
п = 1
оо
J2 \ип\ расходится.
п = 1
Пример 7. Ряд 1 1 h • • • сходится условно, так как он сходится
(по признаку Лейбница), а ряд, составленный из абсолютных величин его членов,
расходится (это гармонический ряд, см. пример 4).
При произвольной перестановке членов абсолютно сходящегося
ряда (в частности, сходящегося ряда с положительными членами) аб-
абсолютная сходимость не нарушается и сумма ряда не меняется. Услов-
Условно сходящиеся ряды этим свойством не обладают: если ряд сходится
условно, то можно так переставить его члены, что сумма нового ряда
станет равной любому наперед заданному числу (можно так переста-
переставить члены, что получающийся ряд окажется расходящимся).
11.2. Функциональные ряды
> Основные определения." Функциональным рядом называется
оо
ряд Yl un(x)i членами которого являются функции, определенные
п-\
оо
на некотором множестве X. Ряд ^ ип(х) называется сходящимся в
п = 1
оо
точке х0 ? X, если сходится числовой ряд Y1 ип(хо)- Совокупность
п = 1
х ? X, для которых функциональный ряд сходится, называется обла-
областью сходимости. Сумма ряда является функцией х, определенной в
области сходимости.
оо
Рад ]С ип(х) называется абсолютно сходящимся на множе-
оо
стве X, если на этом множестве сходится ряд ^2 \ип(х)\-
Пример 1. Функциональный ряд 1 + х + х2 + х3 + • • • сходится при — 1 < х < 1
(см. пример 1 из разд. 11.1). На этом интервале определена его сумма S = .
1 — х
оо
Ряд J2 ик(х) называется остатком функционального ряда
/с=п+1
оо
J2 ип(х)- В случае сходимости ряда на множестве X из равенства
п=1
96 Ряды
S(x) = sn(x) + rn(x) {sn(x) — частичная сумма ряда, rn(x) —сумма
его остатка) следует, что lim rn(x) — О для х ? X.
> Равномерно сходящиеся ряды. Функциональный ряд называ-
называется равномерно сходящимся на множестве X, если для любого е > О
найдется такой номер N (зависящий от е, но не от х), что при всех
п > N выполняется неравенство
ик(х) < е-.для всех х Е X:
к=п+1
Признак равномерной сходимости Вейерштрасса. Функциональ-
оо
ный ряд J2 ип(х) сходится на множестве X равномерно, если суще-
п=1
оо
ствует сходящийся числовой ряд ^ ап с положительными членами
п=1
такой, что |г/п(х)| ^ ап для всех п (начиная с некоторого номера) и
оо оо
для всех х € X. РяД J2 ап называется мажорантой ряда J2 ип(х)-
п=1 п=1
Пример 2. Ряд 5D(—l)n — сходится равномерно при —оо < х < +оо,
П
так как
разд. 11.1).
1 1
——, а числовой ряд у —г~ сходится (см. пример 4 из
п2 гг; п2
n=l
> Свойства равномерно сходящихся рядов. Пусть функцио-
оо
нальный ряд J2 ип(х) равномерно сходится на отрезке х ? [а,6] и
п=1
имеет сумму 5(х). Тогда справедливы теоремы:
1. Если в точке х0Е[а, Ь] непрерывны члены ряда г/п(х), то в этой
точке непрерывна функция S(x).
2. Если ип(х) непрерывны на [а, Ь], то ряд можно почленно инте-
интегрировать:
[
{
S(x)dx=
3. Если члены ряда имеют непрерывные производные, а функци-
оо
ональный ряд J2 ип(х) сходится равномерно на [a,fr^o сумма S(x)
п = 1
имеет на [а, 6] непрерывную производную, причем
(т.е. ряд можно почленно дифференцировать).
11.3. Степенные ряды 97
11.3. Степенные ряды
р- Интервал сходимости степенного ряда. Степенным рядом
называется функциональный ряд вида
-j- агх + a2x + a3x
n=0
(постоянные а0, ах, ... называются коэффициентами степенного
ряда), а также ряд более общего вида
зп(х - xo)n = ao + a1(x - x0) + a2(x - x0J + a3(z - x0K + • • • ,
n=0
где x0 — постоянное число. Ниже рассматриваются только степенные
ряды первого вида, поскольку второй ряд преобразуется в первый
заменой х = х — х0.
оо
Теорема Абеля. Если степенной ряд ^ апхп сходится при неко-
некотором х = хх, то он абсолютно сходится при всех х, удовлетворяющих
неравенству |х| < \хг\. Если ряд расходится при х = х2, то он расхо-
расходится при всех х, для которых |х| > \х2\.
Существуют степенные ряды, которые сходятся при всех значениях х (напри-
оо п оо
мер, ряд Y^ ). Есть ряды, сходящиеся только при х = 0 (например, Y^ n\xn).
п=1 п! п=1
Если степенной ряд при некоторых х ф 0 сходится, а при осталь-
остальных расходится, то из теоремы Абеля вытекает существование числа
it > 0 такого, что при |х| < R степенной ряд сходится (причем абсо-
абсолютно), а при |х| > R — расходится. Это число R называется радиусом
сходимости степенного ряда, а интервал (-R, R) — интервалом схо-
сходимости. На концах интервала сходимости вопрос о сходимости ряда
исследуется отдельно в каждом конкретном случае. Если степенной
ряд сходится только при х = 0, то интервал сходимости вырождается
в точку (при этом R — 0); если ряд сходится при всех х, то it = оо.
Для нахождения радиуса сходимости можно применять признаки
Даламбера и Коши.
9П
Пример. Для ряда ?^ х2п имеем lim
Г\ п
71=1
"п+1
(х)
= lim
9п
п+1
-х
и по признаку Даламбера ряд сходится абсолютно при 9х2 < 1, т.е. в интервале
— у < х < "з", и расходится вне этого интервала (радиус сходимости Я = —). На
,1 « « v^ А
концах интервала при х = ±-^- получаем расходящийся числовой ряд 2_^ —•
п=1 П
Свойства степенных рядов. На всяком отрезке, целиком лежащем
внутри интервала сходимости, степенной ряд сходится равномерно.
4 А. Д. Полянин, В. Д. Полянин и др.-
98 Ряды
Поэтому степенные ряды в интервале сходимости обладают всеми пе-
перечисленными в разд. 11.2 свойствами равномерно сходящихся функ-
функциональных рядов. Особо отметим, что степенной ряд внутри его ин-
интервала сходимости можно дифференцировать почленно любое число
раз; сумма степенного ряда — функция, имеющая внутри интервала
сходимости производные любого порядка.
> Степенные ряды Тейлора и Маклорена. Пусть функция f(x)
бесконечно дифференцируема в окрестности точки х0. Рядом Тейлора
для этой функции называется степенной ряд вида
n=0
= /(*„) + f'(xo)(x - x0) + j/" (*„)(* - x0J + • • ¦ ,
где использованы обозначения 0! = 1, /(°^(х0) = f(x0).
Частным случаем ряда Тейлора (при х0 = 0) является ряд Макло-
Маклорена:
оо 1
Е -^/(п)(°)*п = /(о) +
n=0
Формально записанный ряд Тейлора (Маклорена) для функ-
функции f(x) может:
1) расходиться при х ф х0,
2) сходиться в некоторой окрестности точки х0 к функции, не
совпадающей с /(я),
3) сходиться в некоторой окрестности точки х0 к функции f{x).
В последнем случае говорят, что f(x) разлагается в ряд Тейлора в
упомянутой окрестности, и пишут
п=0 '
Необходимое и достаточное условие разложимости функции
f(x) в ряд Тейлора состоит в том, чтобы остаточный член форму-
формулы Тейлора стремился к нулю при п -> оо в рассматриваемой окрест-
окрестности.
Для разложимости функции f(x) в ряд Тейлора в окрестности х0
достаточно, чтобы в этой окрестности все производные по абсо-
абсолютной величине были ограничены одной и той же постоянной, т.е.
|/(п)(х)| ^ М для всех п, где М — некоторое число.
Единственность разложения функции в степенной ряд. Если
функция f(x) представляется в виде суммы степенного ряда, то его
11.3. Степенные ряды 99
коэффициенты определяются единственным образом (поскольку этот
ряд является рядом Тейлора для /(х), так что его коэффициенты рав-
равны г"» гДе ю = 0, 1, 2,...). Поэтому в задачах о представлении
п\
функции степенным рядом ответ не зависит от выбранного метода
решения.
*> Разложения некоторых функций в ряды Маклорена. При
решении различных задач часто используются следующие разложения
элементарных функций в ряды Маклорена:
х2 х3 хп
е _1 + х + —+ — + ... + — + ...;
slnx = x__+ ^
X2 X4
cosx = l-— + —
X3 X5
= *'¦ 3!
с2 х4 . х2п
r
5 r2n-l
2! п\ '
Первые пять рядов сходятся при всех значениях —оо < х < +оо
(R = оо), а остальные имеют радиус сходимости R = 1. Ряд, стоя-
стоящий в правой части последней формулы, называется биномиальным.
Приведем один частный случай этого ряда:
—— = 1 - х + х2 - х3 + • • • + (-1)пхп + . • • .
При применении вышеприведенных формул для получения разло-
разложения заданной функции в ряд легко выясняется область сходимости
ряда, отпадает необходимость привлечения признаков разложимости
и автоматически получается выражение для общего члена ряда. Так,
для получения разложения функции A + х3) в ряд по степеням х
нужно лишь заменить в последнем разложении аргумент х на х3.
100 Ряды
11.4. Ряд Фурье
> Основные определения. Функция f(x) удовлетворяет условиям
Дирихле на интервале (а, 6),
1) если этот интервал можно разбить на конечное число интерва-
интервалов, в каждом из которых f(x) непрерывна и монотонна;
2) если х0 — точка разрыва, то существуют конечные односто-
односторонние пределы f(xQ + 0) и f(xQ — 0).
Периодическая функция с периодом 2тг, удовлетворяющая на ин-
интервале (—тг, тг) условиям Дирихле, может быть представлена рядом
Фурье:
оо
Лх) = Ь 7 (a cos nx -f- 6 sin nx),
n = l
коэффициенты которого находятся по формулам
7Г
ап = — / f(x) cos nxdx, n = 0, 1, 2,...,
7Г J
— 7Г
7Г
Ьп = — / /(х) sin nx dx, n = 1, 2, 3,...
— 7Г
В точках х0 непрерывности функции f(x) ряд Фурье сходится
к /(х0), а в точках разрыва — к у[/(х0 + 0) + f{x0 -0)].
Разложение в ряд Фурье периодической функции f(x) с перио-
периодом 2/ имеет вид
где
1 / П7ГХ 1 /* . П7ГХ
= jj f(x)cos -у dx' n = T J №Sln "T"
Непериодическую функцию /(х), определенную на интервале
(—/,/), также можно представить в виде суммы ряда Фурье, одна-
однако вне указанного интервала сумма этого ряда S(x) будет отлична
от /(х).*
* Сумма S(x) представляет собой всюду определенную периодическую функ-
функцию с периодом 2/, хотя f(x) может быть непериодической или даже не опреде-
определенной вне интервала (—/, /).
11.4. Ряд Фурье 101
> Разложение в ряд Фурье четных и нечетных функций.
Если f(x) —четная функция, то коэффициенты ряда Фурье нахо-
находятся по формулам
cos
и разложение f(x) в ряд Фурье имеет вид (разложение в ряд по
косинусам):
Если f(x) — нечетная функция, то коэффициенты ряда Фурье
находятся по формулам
К = у J f(x)si
П7ГХ
sin
и разложение f(x) в ряд Фурье имеет вид (разложение в ряд по
синусам):
оо
f ( — V^ А * П7ГХ
п = 1
Если функция f(x) задана на интервале @,/) (и удовлетворяет
условиям Дирихле), то ее можно разложить как в ряд по косинусам,
так и в ряд по синусам (по формулам, приведенным выше). Оба
ряда в интервале @,/) дадут значения f(x) в точках непрерывности
функции и величину у[/(я0 + 0) + f(xQ — 0)] в точках разрыва; вне
интервала @,/) указанные разложения описывают разные функции.
Ряд Фурье в комплексной форме. Разложение функции f(x) в ряд Фурье
в комплексной форме имеет вид
I
где wn = -^-, сп = -^7 1(х)е~ШпХ dx; n = 0, ±1, ±2, ... Выражения
I
П7Г 1 /
е1ШпХ называются гармониками, коэффициенты сп — комплексными амплитудами,
числа ufn — волновыми числами функции j(x)} совокупность всех волновых чисел
{ufn} — дискретным спектром функции.
102 Ряды
11.5. Интеграл Фурье.
Преобразование Фурье
> Интеграл Фурье. Пусть функция f(x) определена на всей число-
числовой оси, удовлетворяет условиям Дирихле на любом конечном интер-
интервале и абсолютно интегрируема по всей оси (т.е. сходится несобствен-
несобственный интеграл f_™ \f{x)\ dx). Тогда справедливо следующее предста-
представление функции f(x) интегралом Фурье:
Л+оо \
J f(t)cos[uj(t-x)]dt\duj.
-oo '
Эту формулу можно записать в виде
+ ОО
f(x)= / [a(uj)cosbjx + b(uj)smujx] du,
о
где использованы обозначения
+оо +<х>
а(и) = — / f(t)cosutdt, Ь(и) = — f f(t) sin u;tdt.
к J * J
— oo —oo
Как и при разложении функции в ряд Фурье, в точках непрерывно-
непрерывности х0 функции f(x) интеграл Фурье дает значение /(яо)> а в точках
разрыва — значение \ [/(х0 + 0) + f(x0 - 0)].
Интеграл Фурье можно записать в комплексной форме:
либо в виде
— oo *-— oo J
либо в виде
+oo +oo
f(x) = I С{и)ег«х du, C(lj) = -i- / /(t)e-twt Л.
— oo —oo
> Разложение в интеграл Фурье четных и нечетных функ-
функций.
Если f(x) —четная функция, то
+ О0 +ОО/ +ОО v
f{x)= / а(и) cos Ljxduj =— / I / f (t) cos ujtdt) cosшх duj.
J к J \ J I
0 x 0
11.5. Интеграл Фурье. Преобразование Фурье 103
Если f(x) —нечетная функция, то
b(uj) sinujx du = — I I / f(t) sin ujt dt \ sin ljx duj.
n J \ J I
0 0 X 0 '
Если f(x) задана в интервале @,+oo), то ее можно представить
в любой из двух приведенных выше форм — смотря по тому, четным
или нечетным образом она продолжена на отрицательную полуось.
> Преобразование Фурье. Представление функции f(x) интегра-
интегралом Фурье в комплексной форме можно записать в виде
+ ОО
/
+ОО
Полагая
+ ОО
^ J ш dt,
— ОО
получим
+
J
+ ОО
J <
Функция (р(ш) называется преобразованием Фурье функции f(t)
(последняя формула задает обратное преобразование Фурье).
> Косинус-преобразование Фурье. Если f(x) — четная функ-
функция, то ее представление интегралом Фурье может быть переписано
в виде
+OOr + ОО -i
x) = V7/ V7//Wcosw<rf<
/2 f
Uj) = J— f (t) COS LJtdt,
V 7Г 7
Полагая
+ OO
0
получим
n.) = J±Jm
) COS LJX <
0
Функция F(o;) называется косинус-преобразованием Фурье функ-
функции f(t). Приведенная пара формул устанавливает закон взаимности:
если F(uj) — косинус-преобразование Фурье четной функции /(#), то
f(x) есть ко синус-преобразование Фурье функции F(uj).
104 Обыкновенные дифференциальные уравнения
> Синус-преобразование Фурье, Если f(x) — нечетная функ-
функция, то ее представление интегралом Фурье может быть переписано
в виде
f(x)=Jl. f L/A / f(t)sinu;tdt\ sinuxduj.
о L о -I
Полагая
I— +00
ф(и) = J— I f(t)sinujtdt,
0
¦'^ ~ V 7Г J
получим
Функция Ф(и>) называется синус-преобразованием Фурье функ-
функции /(t). Приведенная пара.формул устанавливает закон взаимности:
если Ф(о;) —синус-преобразование Фурье нечетной функции /(#), то
f(x) есть синус-преобразование Фурье функции Ф(ш).
12. Обыкновенные
дифференциальные уравнения
12.1. Общие понятия. Уравнения первого
порядка
> Некоторые определение Обыкновенным дифференциальным
уравнением (кратко ДУ) называется уравнение, связывающее незави-
независимую переменную ж, неизвестную функцию у(х) и ее производные:
F{x, У, У1, У", ...,У(п))=0.
Порядком ДУ называется порядок наивысшей производной, входя-'
щей в уравнение. Решением ДУ называется функция у(х), которая
при пЬдстановке в уравнение обращает его в тождество. Соотноше-
Соотношение Ф(х,у) = 0, определяющее решение у(х) неявным образом, назы-
называется интегралом ДУ.
Пример 1. Функция у = 2х является одним из решений ДУ первого порядка
ху' — у = 0. Решениями этого ДУ являются также функции у = —х, у = jrx и др.,
а соотношения х + у = 0, 2у = х и т.п. являются интегралами данного ДУ.
Понятие интеграла ДУ несколько шире понятия решения, так ка^с
во многих случаях в ходе решения (или, как говорят, интегрирования)
ДУ удается получить лишь соотношение между х и у, которое не
' 12.1. Общие понятия. Уравнения первого порядка 105
всегда можно разрешить относительно у, чтобы записать решение в
явном виде.
> Уравнения первого порядка. В общем случае дифференциаль-
дифференциальное уравнение первого порядка записывается так: F(x, у, у') = 0. ДУ,
разрешенное относительно производной, имеет вид г/ = /(#,у). Ино-
Иногда последнее уравнение записывают с помощью дифференциалов:
dy = f{x,y)dx.
Теорема существования и единственности: если функция f(x,y)
непрерывна в некоторой области, содержащей точку (х0, у0), и имеет
там ограниченную частную производную по у, то существует един-
единственное решение уравнения у7 = /(#,у), удовлетворяющее условию
у = у0 при х- х0.
Последнее условие, которое записывают в виде у(х0) = у0 или
у\х=Хо = у0, называется начальным условием. Геометрический смысл
сформулированной теоремы состоит в том, что существует един-"
ственная функция, которая удовлетворяет ДУ и график которой про-
проходит через точку [хо,уо). Задача отыскания решения, удовлетворя-
удовлетворяющего заданному начальному условию, называется задачей Коши.
> Общим решением ДУ называется совокупность всех его реше-
решений. Как правило, общее решение удается записать в виде функции
у = <р{х,С), зависящей от одной произвольной постоянной С; при
конкретных значениях С эта функция, определяет конкретные реше-
решения уравнения (частные решения). Иногда общее решение задается
неявным образом в виде соотношения Ф(#, у, С) = 0, называемого об-
общим интегралом ДУ] при конкретном значении постоянной С — Со
отсюда получается соотношение Ф(#, у, Со) = 0, называемое частным
интегралом.
При соответствующем выборе постоянной С из общего решения
может быть получено любое однозначно определяемое начальными
данными частное решение. Например, общим решением ДУ хг/ — у = 0
является функция у = Сх; при С = % получаем отсюда частное решение
у = 2я, удовлетворяющее начальному условию уA) = 2.
Геометрически общее решение ;(общий интеграл) представляет со-
собой семейство кривых на плоскости ж, у, зависящих от одного параме-
параметра С; эти кривые называются интегральными кривыми данного ДУ.
Частному решению (частному интегралу) соответствует одна кривая
семейства, проходящая через задавшую точку плоскости.
Уравнение у1 = f(x, у) для каждой точки (х, у) определяет значение
у7, т.е. угловой коэффициент касательной к интегральной кривой,
проходящей через эту точку (задает поле направлений на плоскости
х, у). Задача решения ДУ первого порядка с геометрической точки
зрения состоит в нахождении кривых, направление касательных к
которым совпадает с направлением поля в соответствующих точках.
106 Обыкновенные дифференциальные уравнения
> Дифференциальные уравнения, допускающие точное ана-
аналитическое решение (решение в замкнутой форме).
1. Уравнение с разделенными переменными: f(y)dy = g(x)dx.
Эквивалентная запись уравнения:
Функции /(у), д{х) и другие функции, встречающиеся в дальнейшем,
предполагаются непрерывными в рассматриваемых областях измене-
изменения своих аргументов.
Общий интеграл этого уравнения имеет вид
Jf(y)dy = jg(x)dx
Здесь и далее С — произвольная постоянная.
Для выделения частного решения (интеграла), удовлетворяющего
условию у(х0) = у0, можно использовать соотношение
У х
Jf(y)dy = Jg(x)dx.
2/0 хо
Пример 2. Решить уравнение (у + 1) dy = — х dx.
Решение. Общий интеграл этого ДУ имеет вид: J(y + l)dy = — J x dx + С
или (у+ IJ + х2 = 2С. В правой части последнего равенства для краткости часто
вводят новую произвольную постоянную С = 2С.
2. Уравнение с разделяющимися переменными:
Делим обе части на /2(y)#i(#)- В результате получим уравнение
с разделенными переменными. После интегрирования имеем
Пример 3. Решить уравнение х(у2 — 1) dx = (х2 + l)ydy.
Решение. После деления обеих частей на (х2 + 1)(у2 — 1) получим уравнение
х dx у dy
с разделенными переменными: — = — . Решая его, находим общий
х2 + 1 2/2-1
интеграл: х2 + 1 = С (у2 — 1).
Уравнение вида
у' - f(ax 4- by)
с помощью замены z = ах + by, где z = z(x) — новая неизвестная
функция (при этом z1 — а + by'), приводится к ДУ с разделяющимися
переменными: z' = bf(z) + a.
12.1. Общие понятия. Уравнения первого порядка 107
3. Однородное уравнение:
Правая часть этого уравнения зависит от отношения аргументов у
и х. Вводя новую неизвестную функцию z — у/х, получим ДУ с
разделяющимися переменными: xzx = f(z) — z. Решив его и заменив
z на у/х, находим общий интеграл исходного однородного ДУ.
Пример 4. Решить уравнение ху1 — у = хcos2(у/х).
Решение. Записав уравнение в виде у1 = у/х + cos2(у/х), имеем однородное
ДУ. Замена z = у/х приводит к уравнению с разделяющимися переменными
для новой неизвестной функции z(x): xzf = cos2 z. Решая его, находим общий
интеграл: tgz = \n\x\ + С. Возвращаясь к старым переменным, получим общий
интеграл исходного ДУ: tgy/x = In |a:| + С.
К однородному ДУ приводится уравнение вида
ах + Ьу+ с
ах + ву + '
, _ / ax + by+c \
У J \ ах + 0v 4- 7 / '
Для этого нужно перейти к новым переменным х = х — ж0, у = у — у$,
где значения постоянных х0 и у0 находят, решая линейную алгебраи-
Г axQ + byQ + с = 0, ^ _/_ч
ческую систему < В результате для функции у — у{х)
(^ ах0 + ру0 + 7 = 0.
получим уравнение у7 = /( a^ffl)- Последнее после деления числите-
числителя и знаменателя аргумента функции / на х принимает вид одно-
однородного ДУ, правая часть которого зависит только от отношения
переменных: у'= f(?%%)-
4. Линейное дифференциальное уравнение:
Решение ищем в виде произведения у = uv, где функция v = v(x) удо-
удовлетворяет «укороченному» уравнению с разделяющимися переменны-
переменными: v1' + f(x)v = 0 (в качестве такой функции можно взять любое част-
частное решение этого уравнения, например, v = e~F, где F = f f(x) dx).
Для функции и = и(х) получим уравнение с разделяющимися пере-
переменными v(x)u' = g(x). Интегрируя уравнение для и, находим общее
решение:
у = e~Fl j geF dx + с\ где F = / f{x) dx.
Пример 5. Решить уравнение у1 — ctgxy = 2xsinx.
Решение. Положив у = uv, получим vu' + v>(v' — ctgxv) = 2xsinx. В ка-
качестве функции v(x) возьмем какое-нибудь частное решение уравнения с раз-
разделяющимися переменными v1 — ctgxv = 0, например v = sinx. После этого
функцию и(х) найдем из уравнения vu1 = 2xsinx или и1 = 2х. Интегрируя, име-
ем и = Г 2х dx + С = х2 + С- В итоге получим общее решение исходного ДУ:
у = uv = (х2 + С) sin ж.
108 Обыкновенные дифференциальные уравнения
5. Уравнение Бернулли:
у' + f(*)y = д{х)уа (<^ т^ о, ос Ф 1).
Частные случаи а = 0 и а = 1 соответствуют линейному уравнению
(см. выше п. 4). Замена z = ух~а приводит к линейному уравнению:
z' + A — a)f(x)z = A — а)д(х). Общий интеграл уравнения Бернулли
имеет вид
у1-* = Ce-F + A - a)e~F f eFg{x) dx, где F{x) = A - a) f f{x) dx.
6. Уравнение в полных дифференциалах:
df dg
дх ду
Левая часть этого уравнения представляет собой полный дифферен-
дифференциал некоторой функции двух переменных U(x,y).
Общий интеграл: U(x,y) = С, где функция U определяется из
системы
dU__ dU _
ду дх
Интегрируя первое уравнение, имеем U = / /(ж, у) dy + Ч?(х) (при ин-
интегрировании переменная х рассматривается как параметр). Подста-
Подстановка этого выражения во второе уравнение позволяет найти функ-
функцию Ф (а затем функцию U). В итоге общий интеграл уравнения в
полных дифференциалах можно представить в виде
у
У
Jf(xo,t)dt + J'
2/0 *0
где х0 и у0 — произвольные числа.
> Интегрирование дифференциальных уравнений при по-
помощи рядов. Частное решение у = у(х) уравнения первого порядка,
удовлетворяющее заданному начальному условию у(х0) = у0) можно
искать в виде ряда Тейлора по степеням разности х — х0:
У(х) = У0 + У'Ы(* ~ *о) + "^-(я - *оJ + •''
(если начальное условие задается при х0 = 0, получится ряд по
степеням х).
Для нахождения коэффициентов этого ряда заданное ДУ диффе-
дифференцируют по х нужное число раз, принимая во внимание начальное
условие. На практике х берут достаточно близким к х0, чтобы оста-
остаточным членом можно было пренебречь (по сравнению с удержанны-
удержанными членами).
12.2. Дифференциальные уравнения высших порядков 109
Пример 6. Найти первые три члена разложения в ряд частного решения
уравнения у1 = еу + cosx, удовлетворяющего начальному условию у@) = 0.
Решение. Так как начальное условие задано при х0 = 0, будем получать ряд
по степеням х. Из уравнения имеем у'@) = е° +cosO = 2. Дифференцируя обе части
исходного ДУ, найдем у" = eyyf — sinx, откуда с учетом заданного начального
условия и найденного значения у' @) = 2 получим у" @) = е° • 2—sin 0 = 2. Продолжая
аналогично, найдем у'" = еу у"+еу (у'J-cos х, откуда у"' @) = е° -2+е° -22-cos 0 = 5.
Подставляя полученные значения производных в ряд Маклорена для у(х),
приходим к искомому представлению частного решения в виде степенного ряда:
у = 2х + х2 + ¦§* х3 + • • •.
12.2. Дифференциальные уравнения
высших порядков
> Теорема существования и единственности для ДУ п-го
порядка, разрешенного относительно старшей производной
У{п) = /(х,У, У', У", ..,РМ),
формулируется следующим образом. Если функция / непрерывна,
а ее частные производные по аргументам у, у7, у/;, ..., у^)
ограничены в некоторой области, содержащей значения ж0, у = Уо?
у7 = уд, ..., у^) = у5 ~ , то существует единственное решение у(х)
данного уравнения, удовлетворяющее начальным условиям
»(*„) = Уо. У'Ы = 2/о- У"Ы=2/О- •••- У("-1)Ы = ^")-
Задача отыскания такого решения называется задачей Коши для ДУ
п-го порядка.
Для уравнения второго порядка у" = /(ж, у, у7) с начальными усло-
условиями у{х0) — у0, у'(х0) = уд (у0 и уд —заданные числа) геометриче-
геометрический смысл этой теоремы состоит в следующем: через точку (ж0, Уо)
плоскости ж, у проходит единственная интегральная кривая уравне-
уравнения с заданным угловым коэффициентом касательной у'о.
> Общее решение дифференциального уравнения п-го по-
порядка имеет вид
у = <р(ж,С1,С2,...,Сп),
где С1} С2, - -., Сп —произвольные постоянные (число произвольных
постоянных равно порядку уравнения). Конкретные значения посто-
постоянных определяют некоторое частное решение уравнения.
Иногда общее решение задается неявным образом в виде соотно-
соотношения
Ф(аг>у,С1>С2>...>Сп) = 0>
называемого общим интегралом ДУ п-го порядка. При соответству-
соответствующем выборе значений постоянных из общего решения можнр полу-
получить любое (однозначно определяемое начальными условиями) част-
частное решение данного уравнения.
110 Обыкновенные дифференциальные уравнения
> Простейшие дифференциальные уравнения, допускаю-
допускающие понижение порядка.
1. Уравнение вида
у{п) = №
решается последовательным n-кратным интегрированием правой ча-
части. При каждом интегрировании возникает одна произвольная по-
постоянная, а в окончательном результате — п произвольных постоян-
постоянных.
Общее решение этого уравнения можно записать в виде
Xq
где х0 может быть выбрано произвольно.
Пример 1. Решить уравнение у" = 6х + cosx.
Решение. Последовательным интегрированием находим: у1 = Зх2 +sin х+С1,
у = х3 — cos ж + С1х + С2 — общее решение исходного ДУ.
2. Уравнение, не содержащее явно у:
Замена у1 — z(x) с учетом формулы у" — zf(x) приводит к ДУ
первого порядка: F(x,z,z') = 0. Найдя отсюда z(x) и интегрируя
затем равенство у' = z(x)) получают искомую функцию у(х).
Аналогичная замена используется для решения уравнений более
высокого порядка, не содержащих явно у.
Пример 2. Решить уравнение ху" — у' = 0.
Решение. Замена у' = z(x) (у" = z') приводит к уравнению первого
порядка: xz' — z = 0. Его общее решение дается формулой z(x) = С1х. Тогда
у(х) = J C1xdx + C2 = jfC1x2 + C2, т.е. у = С1х2 + С2 —общее решение исходного
ДУ второго порядка.
3. Уравнение, не содержащее явно х:
F(y,y',y") = 0.
Подстановка у' = р(у) (у играет роль независимой переменной)
с учетом равенств у" — р'х = р'уух = р'ур приводит к уравнению
первого порядка: F(y,p,pp^) = 0. Решив это уравнение, найдем
р = ^?(у} Сг). Возвращаясь к искомой функции у, получим для нее ДУ
с разделяющимися переменными: у' = ^(у,^). .
Аналогичная замена используется для решения уравнений более
высокого порядка, не содержащих явно х.
Пример 3. Решить уравнение у" + 2у(у'K = 0.
Решение. Замена у' = р(у) (у" = рр'у) приводит к уравнению первого порядка:
рр'у + 2ур3 = 0. Отсюда (учитывая отдельно решение р = 0 или у = const) имеем
уравнение с разделенными переменными р~2 dp = —2у rfy, общее решение которого
дается формулой р = (у2 +С1)~1. Тогда у1 = (у2 +С1)~1. В итоге получим общий
интеграл исходного уравнения: у у3 + С^у = х + С2.
12.3. Линейные уравнения п-го порядка 111
12.3. Линейные уравнения n-го порядка
^ Линейное ДУ п-го порядка имеет вид
апШя)- + "n-iWl/"-11 + • • • + "i(*W-+ ao(x)y = /(*), A)
где at(x) (г = 0, 1, 2, ..., п) и /(ж) —заданные функции.
Если ап ф О и все коэффициенты а,-(ж) и правая часть f(x) —
непрерывные функции, то при любых начальных условиях решение
уравнения A) существует и единственно.
Если f(x) = 0, линейное уравнение A) называется однородным, в
противном случае— неоднородным. Для уравнения A) часто исполь-
используется краткое обозначение:
L [у] = /(*).
*> Частные решения. Каждое линейное однородное ДУ п-го
порядка имеет ровно п линейно независимых частных решений
У\(х)> 2/2 (я)» •••> Уп(х)> те- таких решений, что ни одно из них не
может быть выражено в виде линейной комбинации остальных (фун-
(фундаментальная система решений). Заметим, что в случае однородного
уравнения второго порядка линейная независимость частных реше-
решений у1 (х) и у2(ж) равносильна условию Ух/у2 ф. const.
Пример 1. Линейное однородное уравнение х2у" + ху' — у = 0 имеет два
частных решения у1 (х) = 1иу2 (х) = 1/х, которые линейно независимы, поскольку
их отношение не является постоянной.
> Теорема о структуре общего решения линейного одно-
однородного дифференциального уравнения. Общее решение линей-
линейного однородного ДУ п-го порядка L [у] = 0 представляет собой ли-
линейную комбинацию его п линейно независимых частных решений:
Уо(*) = С1У1{х) + С2у2{х) + • • • + СпУп{х),
где С1? С2, • • •, Сп —произвольные постоянные.
Пример 2. Найти общее решение ДУ х2у" + ху' — у = 0.
Решение. Общее решение этого линейного однородного уравнения является
линейной комбинацией его частных решений, приведенных в примере 1. Поэтому
> Теорема о структуре общего решения линейного неодно-
неоднородного дифференциального уравнения. Общее решение линей-
линейного неоднородного ДУ п-го порядка L [у] = f(x) равно сумме общего
решения у0 = уо(х) соответствующего однородного уравнения L [у] = О
и какого-нибудь частного решения у = у(х) данного неоднородного
уравнения:
У = Уо + У •
Пример 3. Найти общее решение ДУ х2у" + ху1 — у = Зх2.
Решение. Общее решение соответствующего линейного однородного урав-
уравнения приведено в примере 2. В качестве частного решения неоднородного ДУ
можно взять функцию у(х) = х2. Поэтому общее решение данного линейного не-
неоднородного уравнения имеет вид у = у0 +y = Clx + C2lx + x2.
112 Обыкновенные дифференциальные уравнения
12.4. Решение линейных однородных
уравнений п-го порядка с постоянными
коэффициентами
> Линейное однородное ДУ n-го порядка с постоянными
коэффициентами имеет вид
«пУ(п) + *n-iV{n~l) + •" + ЧУ' + «оУ = 0, B)
где aOi a1} ...., ап —постоянные числа, ап ф 0.
Для решения составляют характеристическое уравнение
апкп + ап_1кп + \- ахк + а0 = 0
и находят его корни к1} к2, ..., кп. При этом могут представиться
следующие случаи.
> Все корни характеристического уравнения действитель-
действительны и различны. В этом случае однородное ДУ B) имеет п линейно
независимых частных решений eklX, ек*х, ..., екпХ, так что его общее
решение имеет вид
уо = С1ек>* + С2ек** + --- + Спек"*.
Пример 1. Решить уравнение у111 -f Зу" — 4yf = О.
Решение. Характеристическое уравнение к3 + Зк2 — 4к = 0 имеет корни
А;1 = 0, к2 = 1, &з = ~^# Поэтому общее решение исходного ДУ дается формулой
у0 =С1+С2е* + С3е-4х.
> Некоторый действительный корень характеристическо-
характеристического уравнения к имеет кратность г. Этому корню отвечают г
линейно независимых частных решений вида екх', яе**, ..., хг~1екх,
линейная комбинация которых (вместе с остальными п — г частными
решениями) даст общее решение однородного уравнения:
Уо = (Сх + С2х + • • • 4- Cra?r~1)e*ar + • • • 4- СпекпХ.
Пример 2. Решить уравнение у1" + у" — у' — у = 0.
Решение. Здесь характеристическое уравнение к3 + к2 — к — 1 =0 или
(к + 1)(к2 — 1) =0 имеет корни к1 = к2 = — 1 (двукратный корень), &3 = !• Поэтому
общее решение исходного ДУ дается формулой у0 = (Сх + С2х)е""а: + Сде^.
> Характеристическое уравнение имеет пару комплексно
сопряженных корней <x±l3i. При построении общего решения
этой паре отвечают два частных, решения однородного уравнения
еах cos/fa, е^Бт/Зх. Они не пропорциональны и, следовательно, ли-
линейно независимы.
12.5. Линейные неоднородные уравнения п-го порядка 113
Пример 3. Решить уравнение у"' — 6у" -f 13у' = 0.
Решение. Характеристическое уравнение к3 — 6к2 + 13к = 0 может быть
записано в виде к(к2 — вк -f 13) = 0 и имеет корни к1 = 0, к23 = 3 ± 2г. Общее
решение исходного ДУ дается формулой yQ = С^ + С2е3а: cos2x + С3е3х sin 2г.
> Некоторая пара комплексно сопряженных корней а ± /3 г
имеет кратность г. Такой паре отвечают 2г линейно независимых
частных решений однородного уравнения:
еахcos/Зх} хеах cos /Зх, ..., xr~1eaxcosCx,
eaxsmf3x, хеах sin/Зх, ..., хг~1еах sin/Зх.
Их линейная комбинация (вместе с остальными п — 2 г частными
решениями линейного однородного ДУ n-го порядка) дает общее
решение исходного уравнения.
12.5. Линейные неоднородные
уравнения n-го порядка
> Теорема о суперпозиции частных решений. Пусть функция
у^х) является частным решением линейного неоднородного диффе-
дифференциального уравнения L [у] = Д(ж), а функция у2(х) —частным
решением уравнения L [у] = f2{x). Тогда частным решением у урав-
уравнения вида L [у] = fi(x) + f2(x) является сумма у = yi(x) + у2(х).
Пример 1. Найти общее решение уравнения у" + у = х + 2ех.
Решение. Здесь характеристическое уравнение к2 +1 = 0 имеет комплексные
корни ±г. Поэтому общее решение однородного уравнения у" + у = 0 имеет вид
yQ = С1 cosx + С2 sinx. Легко проверить, что неоднородное уравнение уп -\- у = х
имеет частное решение у1 = х, а уравнение у"+у = 2ех — частное решение у2 = еХ •
Отсюда следует, что частное решение у исходного неоднородного уравнения
равно сумме у = х + ел, так что искомое общее решение дается формулой
у = yQ -j- у = Сх cosх + C2sinx + х + ех.
> Метод вариации постоянных. Для нахождения частного ре-
решения линейного неоднородного ДУ существует общий метод, назы-
называемый методом вариации постоянных. Рассмотрим его на примере
линейного неоднородного ДУ второго порядка:
у" + аг(х)у' + ао(х)у = f(x).
Пусть известно общее решение соответствующего однородного урав-
уравнения:
где yi(x) и у2(х) —линейно независимые решения однородного ДУ>
С\ и С2 —произвольные постоянные. Частное решение у неоднород-
неоднородного ДУ ищут в виде у = С1(х)у1(х) + С2(х)у2(х), т.е. произвольные
постоянные заменяются неизвестными функциями х. Эти функции
114 Обыкновенные дифференциальные уравнения
находят из системы линейных алгебраических уравнений для опреде-
определения производных С[ и С'2:
/C{(x)y1(x)+Cj(x)y2(x) = O>
Пример 2. Найти общее решение уравнения у" — 2у' -f у = ех/х.
Решение. Здесь общим решением однородного уравнения является функция
у0 = С^ех + С2хех. Поэтому частное решение неоднородного уравнения ищем в
виде у = С1(х)ех + С2(х)хех. Для неизвестных функций Сг (х) и С2(х) составляем
систему C):
f С[(х)ех + С^(х)хех = О,
Решив эту систему, найдем С[(х) = — 1, С2(х) = 1/х. Отсюда, интегрируя,
получим С1(х) = —х, С2(х) = 1п|х|. Таким образом, искомое частное решение
неоднородного ДУ дается формулой у = — хех + lnjxlxe*, а его общее решение
имеет вид
у = Уо + у = Схех + Cjxe^ - хе* + In Hare*.
> Поиск частных решений неоднородных уравнений специ-
специального вида. Для линейных неоднородных уравнений L [у] = f(x) с
постоянными коэффициентами поиск частного решения существенно
облегчается, если правая часть f(x) имеет так называемый специаль-
специальный вид. При этом подбор частного решения производится методом
неопределенных коэффициентов, который основан на знании формы
этого решения, зависящей от особенностей не только правой, но и
левой части уравнения. Различные формы частного решения в зави-
зависимости от вида правой части неоднородного ДУ и от корней харак-
характеристического уравнения приведены в табл. 2.
Отметим, что Ри и Qu — полные многочлены степени и (т.е.
в их записи присутствуют все степени х от нулевой до г/-й). В
третьем и четвертом случаях в записи частного решения всегда
присутствуют два многочлена Pv и Qv одинаковой степени г/, равной
наибольшей из степеней т и п (в частности, если Рт(х) = 0 или
Qn(x) = 0, решение все равно следует искать в полном виде, указанном
в таблице). Коэффициенты многочленов Pv и Qu находят методом
неопределенных коэффициентов.
Пример 3. Найти общее решение уравнения у1" — 4у' + Ъу = (х — 5) cosx.
Решение. Характеристическое уравнение к2 — 4k -\- 5 = 0 имеет кор-
корни 2 ± г у поэтому общее решение однородного уравнения дается формулой
у0 = е2х(С1 cosx + C2sinx). Как следует из таблицы, частное решение неодно-
неоднородного уравнения следует искать в виде у = (Ах -f В) cos x + (Мх + N) sinх. Под-
Подставляя это выражение в исходное ДУ и приравнивая коэффициенты при cosx,
xcosx, sinx, xsinx, получим линейную систему алгебраических уравнений, отку-
откуда найдем следующие значения неопределенных коэффициентов: А = -|-, В = ——-,
М — — ~-, iV = "|"-B итоге имеем общее решение исходного уравнения
у = yQ + у = е2х(С1 cosx + С2 sinx) + (у# — -Jq-j cosx + (^— у#) sinx.
12.6. Системы обыкновенных дифференциальных уравнений
115
ТАБЛИЦА 2
Вид частных решений неоднородного уравнения с постоянными коэффициентами
у(п' + an-i2/ + 1" а\У' + аоУ = Нх) Для правой части специального вида
Вид правой
части f(x)
Рт(*)
Рт(Ф**
-(а — действи-
действительное число)
Pm(x)cospx+
+ Qn(x)sin/?x
[Pm(x)cos/?x+
+ Qn(x)sinpx]ea*
Корни характеристического уравнения
Ап + а^Х"-1 + •• • • + ах А + а0 = 0
Число 0 не является корнем характе-
характеристического уравнения (т.е. а0 ф 0)
Число 0 является корнем характе-
характеристического уравнения (кратности г)
Число а. не является корнем
характеристического уравнения
Число а. является корнем характе-
характеристического уравнения (кратности г)
Число \0 не является корнем
характеристического уравнения
Число i/З является корнем характе-
характеристического уравнения (кратности г)
Число а + i/З не является корнем
характеристического уравнения
Число а + i/З является корнем характе-
характеристического уравнения (кратности г)
Вид частного
решения у = у(х)
*ГРт(х)
Рт(фаХ
хгРт(х)е°*
Pu(x)cos/3x+
+ Qu(x)sinCx
xr[Tu(x)cospx+
+ Qu(x)sinj3x]
\Pu(x)cosCx+
+ Qu(x)smi3x]eax
xr[P^(x)cos/?x+
+ Qu(x)sinpx]eax
Обозначения: Pm и Qn — многочлены степеней типе заданными коэффици-
коэффициентами; Рт и Ри, Qu — многочлены степеней га и //, коэффициенты которых
определяются в результате подстановки данного вида частного решения в
исходное уравнение; v = max(m, n); г2 = — 1.
12.6. Системы обыкновенных
дифференциальных уравнений
> Некоторые определения. Многие системы дифференциальных
уравнений могут быть записаны в так называемой нормальной форме:
D)
Уп =
Решением системы ДУ называется совокупность п функций
2/i > 2/г» • • • > 2/п» которые при подстановке в каждое из уравнений пре-
превращают его в тождество. Одно ДУ n-го порядка всегда можно заме-
заменить нормальной системой D), вводя вспомогательные неизвестные
функции. Часто верно и обратное: нахождение решения системы D)
можно свести к решению одного ДУ n-го порядка.
116 Обыкновенные дифференциальные уравнения
Пример 1. Решить систему ДУ\
lVl=2/l-2/2 +
\у'2 = -42/! -2
Решение. Выразив из первого уравнения у2 = — у[ + У\ + у я2 и подставив
его во второе уравнение, получим линейное ДУ второго порядка для yi(x):
у" -f у[ — 6ух = Зх2 — х — 1. Общее решение этого уравнения имеет вид yi(x) =
= С1е2х -f С2е~3х — ух2. Вторая неизвестная функция находится из полученного
выше выражения для у2: 2/г(х) = ~С1е2х + 4С2е~3л; + х2 + х.
> Общее решение нормальной системы D) имеет вид
у1 = у>1(ж,С1,С2,...,Сп),
где С\, С2, ..., Сп —произвольные постоянные. Задавая значения
искомых функций при некотором значении х, можно поставить для
системы ДУ задачу о нахождении частного решения, удовлетворяю-
удовлетворяющего заданным начальным условиям (задачу Коши). Как и в случае
одного ДУ, для системы D) имеет место теорема, гарантирующая
существование и единственность частного решения при непрерывно-
непрерывности правых частей вместе с их частными производными.
В приложениях наиболее часто встречаются нормальные системы
линейных ДУ. Для краткости ограничимся системой двух линейных
уравнений с постоянными коэффициентами:
< ) _ 1 2 х ' E)
Такие системы обычно решают, не сводя их к одному ДУ. Если
Д(х) = /2(х) = 0, то система называется однородной. Общее реше-
решение неоднородной системы E) складывается из общего решения со-
соответствующей однородной системы и какого-нибудь частного реше-
решения неоднородной системы (как и в случае одного линейного ДУ).
Для построения общего решения однородной системы сначала
находят ее частное решение, имеющее вид
У\\Х) — а1е 1 У2\Х) — а2е >
где к — собственное значение матрицы системы, т.е. корень харак-
характеристического уравнения
а-к Ъ
d-k
F)
а координаты собственного вектора {а^, а2} находят из системы
линейных однородных алгебраических уравнений
Па- *)<*! + Ъа2 = О,
1 cai + {d-k)a2=0. [ '
12.6. Системы обыкновенных дифференциальных уравнений 117
После этого строят общее решение однородной системы. Возможны
следующие случаи.
^ 1. Характеристическое уравнение F) имеет два действи-
действительных различных корня fei и йг- Этим корням отвечают два
собственных вектора с координатами {an, a2i} и {а12, &22} (коор-
(координаты определяются с точностью до числовых множителей). Общее
решение исходной однородной системы ДУ определяется линейной
комбинацией частных решений
». Г1 ,ъ ок\Х I гч окчх • r~i ^ ?>к\Х \ С< т ^к^х
ил — Ui 1*1 1 С Т L")l*i nC . Цп — Wi l*oi С Т UouooC «
С1 1 11 ' A LА ' &Z 1 ZL Z ZZ i
где С1 и С2 —произвольные постоянные.
Г у[ = ух 4- 4у2 - 4,
Пример 2. Решить систему ДУ: < ;
[У2 = У\ +2/2 - 1-
Решение. Характеристическое уравнение
1-А: 4
1 1 -
имеет корни /с1 = 3, к2 = — 1. Система уравнений G) для нахождения координат
собственных векторов записывается в виде
- к)а2 = 0. ' ^ ах - 2а2 = 0.
Отсюда а1 = 2ск2. Взяв, например, а2 = 1, получим с^ = 2. Таким образом,
первым частным решением однородной системы ДУ является (с точностью до
постоянного множителя) у1 = 2е3х, у2 = е3х.
При к = — 1 аналогичным образом находим второе частное решение:
2/х = — 2е~х, 2/2 = е~х- Линейная комбинация двух найденных частных решений
дает общее решение однородной системы:
2/i =2Cie3x -2С2е~х, 2/2 = С^е3* + С2е~х.
В этом примере легко усматривается частное решение полной (неоднородной)
системы: у1 = 0, у2 = 1. Поэтому общее решение исходной неоднородной системы
ДУ имеет вид
2/! = 2Суе3х - 2С2е~х, у2 = Схе3х + С2е~х + 1.
> 2. Характеристическое уравнение F). имеет пару ком-
комплексно сопряженных корней /3 ± i~y. В этом *случае следует най-
найти комплексное частное решение однородной системы ДУ (аналогич-
(аналогично тому, как это делалось выше при отыскании частного решения, от-
отвечающего действительному корню). Отделяя затем действительную
и мнимую части комплексного решения, получим два действительных
линейно независимых частных решения, линейная комбинация кото-
которых даст общее решение однородной системы ДУ.
[ 2/J = — 2/2 >
Пример 3. Решить систему ДУ: <
1 =22/!+ 22/2.
118 Приближенные вычисления
Решение. Характеристическое уравнение
имеет корни к12 = 1 ± *. Система G) для нахождения координат (комплексного)
собственного вектора (?1? 82) имеет вид
- kSx - 82 = 0, .
2*! + B - к)82 = 0.
Из этой системы при к = 1 + i находим одно из ненулевых решений: 8Х = 1,
82 = — 1 — *. Соответствующее комплексное решение системы дается формулами
ух =1еA+*)л;, у2 = ( —1 —г)^1**)*. Отделяя здесь действительные и мнимые части
. и составляя их линейную комбинацию, получим общее решение системы:
Vi(x) = Схех cosx + С2ех sinx,
у2(х) = C1ex(sinx — cosx) — C2ex(smx + cosx).
> 3. Характеристическое уравнение F) имеет один дей-
действительный двукратный корень fei = fe2 = к. Полный анализ
этого случая проводится методами линейной алгебры. На практике
решение системы удобно искать методом неопределенных коэффици-
коэффициентов в виде
(8)
, Г 2/i = 2/i -
\ 2/2 = 2/2 •
Пример 4. Решить систему ДУ:
Решение. Характеристическое уравнение
= A - А:)'2 = 0
1-А: -7
0 1-А;
имеет двукратный корень /с1 = к2 = 1. Решение системы ищем в виде (8) при
к = 1. Подставляя эти выражения в исходную систему и сокращая на ех, получим
Р = —7G + 8х), 8 = 0. Отсюда видно, что от и 7 можно считать произвольными
числами (которые обозначимсоответстр<^шо чепез С± и С2) и что 8 = 0, /?= —7С2.
Таким образом, общее решение исходной однородной системы ДУ запишется в
виде
2/1 =(С1-7С2х)ех, У2 = С2ех.
13. Приближенные вычисления
13.1. Метод наименьших квадратов
Метод наименьших квадратов служит для приближенного опре-
определения функции, заданной таблично по результатам измерений. Об-
Общий вид искомой функциональной зависимости задают априорно с
помощью набора параметров (неопределенных коэффициентов) исхо-
исходя из различных соображений.'Наиболее часто используют линейную,
13.1. Метод наименьших квадратов
119
степенную и экспоненциальную зависимости. Неопределенные коэф-
коэффициенты определяются путем минимизации суммы квадратов раз-
разностей между результатами измерений и искомой зависимостью при
тех же значениях аргумента.
Далее будем считать, что хх, х2, ..., хп —табличные значения
аргумента, а у1, у2, ..., уп —соответствующие значения функции.
> Линейная функция. Пусть в качестве искомой зависимости
выбрана линейная функция у = ах+Ь. Для вычисления неопределенных
коэффициентов а и 6 необходимо минимизировать сумму
-ах,--бJ.
Используя необходимые условия минимума функции 5 = S(a, b) (т.е.
приравнивая нулю частные производные 5 по параметрам а и 6),
получим систему двух линейных уравнений для а и 6:
1=1
1=1
1=1
1=1 1=1
Значения х1} х2, ..., хп и у^ у2, ..., уп з^есь считаются заданными.
> Квадратичная функция. Если в качестве искомой зависимости
взять квадратичную функцию у = ах2 + Ьх + с, то для определения
коэффициентов а, 6 и с приходим к системе трех линейных уравнений
t=i t=i
п п
"+b Ех.2+с Е xi =
n n
г = 1 i=l f=l
> Общий случай. Рассмотрим общий случай функциональной за-
зависимости
где а1} а2,
параметры, которые подлежат определению
методом наименьших квадратов.
Составим сумму
г - f(Xi i ali a2> ' • ' i am)] 2-
120 Приближенные вычисления
Необходимые условия минимума этого выражения приводят к следу-
следующей системе га алгебраических (или трансцендентных) уравнений
для нахождения неопределенных параметров:
—— = 0, i= 1, 2, ..., m,
которая в общем случае будет нелинейной.
13.2. Приближенное решение
алгебраических уравнений
> Предварительные замечания. Для большинства алгебраиче-
алгебраических (трансцендентных) уравнений вида
/(*) = <>,
где /(х) — непрерывно дифференцируемая функция, не существует
точных аналитических формул, позволяющих найти его корни.
Приближенное решение данного уравнения на первом этапе со-
состоит вотделении корней, т.е. определении промежутков (по возмож-
возможности более узких), внутри которых находится только один корень.
Такой промежуток [а, 6] обычно отыскивают графически, числа а и b
удовлетворяют условию f(a)f(b) < 0.
На втором этапе вычисляют последовательные приближения
xn G [а, Ь] (п = 1, 2, ...) искомого корня с: с = lim х , для чего чаще
п—юо
всего применяют следующие методы.
> Метод касательных (метод Ньютона). Пусть на промежут-
промежутке [а, 6] существуют и непрерывны производные /'(х), f"(x) и выпол-
выполняются неравенства f'(x) ф 0, /"(х) Ф U при всех х Е [а, 6].
Если f(a)f"(a) > 0, то в качестве первого приближения берем
х1 = а; если f{b)f"(b) > 0, то хх = 6.
Последующие приближения вычисляются по формулам
„-о 3
Практически погрешность приближения хп оценивается по
формуле
|c-xn| <0,5|xn_1-xn-2|,
где с —точное значение корня.
> Метод хорд. Обозначим а = #J~, 6 •= xf. Приближение х*
вычисляется по формуле
13.3. Вычисление определенного интеграла 121
Вместо отрезка [#i~jxi"] рассматривается отрезок [xj~,x*], если
f(xT)f(xi) < 0, или отрезок [aij,^], если f{x^)f(x\) < 0. В любом
случае обозначим левый конец нового отрезка через xj, а правый
конец — через хJ, и вычислим следующее приближение по формуле
2~
Рассуждая далее аналогично тому, как это делалось раньше, будем
рассматривать отрезок [xj, %t] и вычислим следующее приближе-
приближение Хд И Т.Д.
Будем считать, что после п итераций вычислены приближения х~,
х+, х*. Тогда рассмотрим отрезок [х~,х*], если f{x~)f(x*n) < 0, или
отрезок [х*, х?], если /(х?)/(х*) < 0. Обозначим левый конец нового
отрезка через x~+i, а правый конец — через я?+1. Вычислим (п-\- 1)-е
приближение по формуле
т* _ т+ f(xn+i) / + __ - ч
•»+i-x»+i /(x++1)-/(x;+1)(X"+1 "+l)-
Погрешность этого приближения можно оценить с помощью нера-
неравенства
|c-«;+il<0l5|x++1-x^+1|l
где с — точное значение корня.
13.3. Вычисление определенного интеграла
[Ь
Для приближенного вычисления интеграла / /(х) dx разделим
Ja
отрезок [а, Ь] на п равных частей длиной h = . Обозначим
х0 = a, xlt ..., хп = 6 —точки деления, у. = /(х,), г = 0, 1, ..., п.
> Формулы прямоугольников:
I
Погрешность этих формул Rn пропорциональна h и оценивается с
помощью неравенства
|Д„| ^±h(b-a)Mu Мх = maxj/'(x)|.
> , Формула трапеций:
122 Приближенные вычисления
Погрешность этой формулы пропорциональна h2 и оценивается с
помощью неравенства
|ДЯ| ^ ^-Л2F- а)М2) М2= тах|/"(х)|.
> Формула Симпсона:
Г 1
/ f{x)dx&±)
Ja
где п — четное число. Погрешность формулы Симпсона пропорцио-
пропорциональна Л4 и оценивается с помощью неравенства
Формула Симпсона приводит к точным результатам для случая,
когда подынтегральная функция является многочленом второй или
третьей степени.
13.4. Численное интегрирование
дифференциальных уравнений
Рассмотрим обыкновенное дифференциальное уравнение первого
порядка у' = /(х, у) с начальным условием у = у0 при х = х0. Требуется
найти приближенно его решение у = у{х) на отрезке [х0, xj.
Л» _ /Y»
Разделим отрезок [х0, х+] на п равных частей длиной h = — —.
п
Будем искать приближенные значения у11 у2, ..., уп функции у(х) в
точках деления х11 х2, ..., хп = х+.
> Метод ломаных Эйлера. При заданном значении у0 = у(х0)
остальные значения у{ « у(х{) последовательно вычисляются по фор-
формуле
где г = 0, 1, ..., п- 1.
> Метод Рунге — Кутты обеспечивает более высокую точность
по сравнению с методом Эйлера. Искомые значения у{ последователь-
последовательно вычисляются по формулам
Уг + 1 = Уг + "ИЛ + 2/2 + 2/3 + Д),
где использованы краткие обозначения
/з = Л*,- + ТЛ> й + ТЛЛ)> Л = Л*г+ л- % + л/з)-
14.1. Правила и формулы комбинаторики 123
14. Теория вероятностей
14.1. Правила и формулы комбинаторики
При решении задач теории вероятностей используются правила и
формулы комбинаторики.
> Правило суммы. Пусть дана некоторая совокупность объектов
(произвольной природы). Если некоторый объект а может быть
выбран из этой совокупности га способами, а другой объект /3 может
быть выбран к способами, то выбор либо объекта а, либо объекта /3
можно осуществить га -f к способами.
*> Правило произведения. Если объект а может быть выбран
т способами и после каждого такого выбора объект C можно вы-
выбрать к способами, то выбор упорядоченной пары объектов (а, /3)
можно осуществить тк способами.
Пример 1. Сколько имеется двузначных чисел, составленных из разных
цифр?
Решение. Первой цифрой числа может быть одна из цифр 1, 2, ..., 9, а
второй —- одна из оставшихся после выбора первой цифры, а также 0 (одна из
девяти цифр). Искомое количество, согласно правилу произведения, равно 9-9 = 81.
> Размещениями из п (различных) элементов по г элементов на-
называются комбинации, состоящие из г элементов, взятых из п элемен-
элементов (г < п), которые отличаются друг от друга либо составом взятых
элементов, либо их порядком. Число размещений равно
Пример 2* Сколько трехзначных чисел можно составить из шести цифр 0, 1,
2,3,4,5?
Решение. Из данных шести цифр отобрать три (в определенном порядке)
можно Aq способами. Из этого количества нужно вычесть те тройки чисел,
которые начинаются с нуля (т.е. количество двузначных чисел); оно равно числу
размещений из цифр 1, 2, 3, 4, 5 по две, т.е. А\. Искомое число трехзначных чисел
равно >1|->1§ =6-5-4-5-4= 100.
> Перестановками п элементов называются комбинации, состоя-
состоящие из этих п элементов, отличающиеся друг от друга только поряд-
порядком расположения элементов. Число перестановок равно
Рп = п\= 1-2-3. ..п.
Эту формулу можно получить из выражения для Агп при г = п.
Пример 3. Сколькими способами можно рассадить за столом 4 человека?
Решение. Искомое число способов равно числу перестановок четырех эле-
элементов, т.е. Р4 = 4! = 1 • 2 • 3 • 4 = 24.
124 Теория вероятностей
> Сочетаниями из п (различных) элементов по г называются
комбинации, состоящие из г элементов, взятых из данных п элементов
(г < п), которые отличаются друг от друга хотя бы одним элементом.
Число сочетаний равно
Г = =
Рг г! г\(п-г)\'
Число сочетаний удовлетворяет соотношению Сгп — С?~г.
Пример 4. Сколькими способами можно отобрать три шара из ящика,
содержащего шесть пронумерованных шаров?
Решение. Искомое число способов равно числу сочетаний из шести элемен-
о 6-5-4
тов по три, т.е. Cq = = 20.
3-2-1
14.2. Основные понятия теории
вероятностей
> Основные определения. Элементарное событие — любой из
взаимоисключающих исходов рассматриваемого опыта (испытания).
Пространство элементарных событий ft— множество всех элемен-
элементарных событий. Событие — любое подмножество А множества П.
Событие А наступает тогда, когда исходом опыта является одно из
элементарных событий, составляющих А. .
Пример 1. Пусть опыт состоит в однократном бросании игральной кости.
Здесь имеется шесть исключающих друг друга исходов, так что пространство
элементарных событий ft = {u^, ш2, ^3, w4, w5, w6}, где элементарное событие
0Jk — исход опыта, состоящий в выпадении к очков. Если событие А состоит в
появлении нечетного числа очков, то А наступает тогда, когда исходом опыта
является одно из элементарных* со бытии о^, а;3> ^5-
События принято условно изображать в виде некоторых фигур на
плоскости (диаграмм Эйлера — Венна), а элементарные события —в
виде точек, принадлежащих этим фигурам.
Суммой (объединением) событий А и В называется событие
А + В, которое состоит из элементарных событий, входящих хотя бы
в одно из событий А и В. Произведением (совмещением) событий
А и В называется событие АВ, которое состоит из элементарных
событий, входящих в оба события А и В. Эти понятия очевидным
образом обобщаются на случай любого числа событий.
Событием, противоположным событию А) называется событие
А, которое наступает тогда и только тогда, когда событие А не на-
наступает. Множество П называется достоверным событием (в резуль-
результате опыта оно обязательно наступает). Пустое множество 0 назы-
называется невозможным событием (в результате опыта оно заведомо не
наступит).
14.2! Основные понятия теории вероятностей 125
События А и В называются несовместными, если АВ = 0.
Справедливы соотношения А А = 0 и A+A = Q. Говорят, что события
Л1? А2) ..., Ап образуют полную группу событий, если
А{А- = 0 {1ф i), Аг +А2 + • • •+ Ап = П.
Если каждое появление события А сопровождается появлением со-
события В, то говорят, что А является частным случаем В (или что
В является следствием А, или что А влечет за собой В). В этом слу-
случае применяется запись А С В, а каждое элементарное событие и?А
входит и в событие В. События А и В называются равносильными
[А — В), если каждое из них является частным случаем другого.
> Различные определения вероятности.
Статистическое определение вероятности. Пусть опыт прове-
проведен N раз и при этом событие А наступило к раз. Частотой собы-
события А в данной серии опытов называется отношение k/N. Вероятно-
Вероятностью Р(А) события А называется число, около которого колеблется
частота события А в длинных сериях испытаний.
Классическое определение вероятности. Пусть пространство эле-
элементарных событий ft состоит из п равновозможных элементарных
событий. Тогда вероятность события А равна Р(А) = т/п, где т —
число элементарных событий, входящих в А (число благоприятных
исходов). Так, в примере 1 вероятность выпадения грани с нечетным
числом очков равна Р(А) = |- = \.
Пример 2. В ящике 15 шаров, из которых 5 белых и 10 черных. Наугад
вынимают 6 шаров. Найти вероятность того, что среди вынутых шаров 2 белых.
Решение. Общее число элементарных исходов данного опыта равно числу
сочетаний из 15 по 6, т.е. С\ъ = ^'^'^.l^l 10 = 5005. Число благоприятных
на 5QQ5
Геометрическая вероятность. При геометрическом подходе к
определению вероятности в качестве пространства элементарных со-
событий П рассматривается произвольное множество на прямой, на
плоскости или в пространстве. Испытание интерпретируется как слу-
случайный выбор точки в области i), а событие А — как попадание точ-
точки в некоторую подобласть А области ?1. Предполагается, что веро-
вероятность выбрать точку в области А пропорциональна мере области
(т.е. длине, площади или объему) и не зависит от расположения и
формы области. Вероятность события А определяется формулой
исходов равно произведению C$C\Q = -|~ • ^.t-^-i = 2Ю0. Искомая вероятность,
согласно классическому определению, равна 5QQ5 « 0,42.
мера S2
Отметим, что всегда справедливы соотношения 0 ^ Р{А)
Р@)=О,
126 Теория вероятностей
14.3. Условная вероятность. Теоремы
и формулы теории вероятностей
> Условная вероятность Р(В/А) события В при условии, что
событие А произошло, по определению равна
Р(В/А) = Р{АВ)/Р(А) (Р(А) ф 0).
Отсюда следует правило умножения вероятностей:
Р{АВ) = Р(А)Р(В/А).
Пример 1. Пусть в условиях примера 2, рассмотренного в разд. 14.2, из ящи-
ящика последовательно вынимают два шара (первый шар в ящик не возвращается).
Найти вероятность того, что первый вынутый шар окажется белым, а второй —
черным.
Решение. Обозначим через А событие «первый вынутый шар оказался
белым», через В — «второй вынутый шар оказался черным». Искомая вероятность
^$ 1
События А и В называются независимыми, если Р(АВ) =
= Р(А)Р(В). Для независимых событий А и В выполняются равен-
равенства Р(А/В) = Р(А), Р{В/А) = Р{В).
Для вычисления вероятности произведения п событий (п > 2)
применяется формула
Р(А,А2 ¦ • -Д.)
События А1} А2) ..., Ап называются независимыми в совокупно-
совокупности, если вероятность любого из них не изменяется при наступлении
какого угодно числа событий из остальных; для таких событий спра-
справедлива формула
2-Ап) = Р(А1)Р(А2)-.Р(Ап).
> Теорема сложения вероятностей:
Р(А + В) = Р{А) + Р(В) - Р(АВ).
Для несовместных событий А и В эта формула упрощается:
Отсюда следует формула для нахождения вероятности противополож-
противоположного события: Р(А) = 1 — Р(А).
Для п попарно несовместных событий А1у А2, ..., Ап теорема
сложения имеет вид
Р(А2) + ... + Р(Ап).
»суммы
против<
= 1-Р(А1А2
Часто удобно вычислять вероятность суммы событий, сводя дело
к вычислению вероятности произведения противоположных событий:
14.3. Условная вероятность. Формулы теории вероятностей 127
Пример 2. Из двух орудий производят (независимо) по одному выстрелу
по цели. Вероятность попадания в цель для первого орудия составляет 0,8, для
второго — 0,9. Требуется найти:
ia) вероятность только одного попадания в цель;
;б) вероятность хотя бы одного попадания.
Решение, а) Пусть событие А — попадание в цель из первого орудия, В_— из
второго. Тогда^вероятность только одного попадания в цель равна Р(АВ+АВ) =
= Р(АВ) + Р(АВ) = Р(А)Р(В) + Р(А)Р(В) = 0,8 A - 0,9) + A - 0,8) 0,9 = 0,26.
б) Вероятность хотя бы одного попадания в цель равна Р(А + В) = Р(А) +
+ Р(В) - Р(А)Р(В) = 0,8 + 0,9 - 0,8 • 0,9 = 0,98.
Заметим, что последний результат обычно предпочитают получать так:
Р(А + В) = 1 - Р(АВ) = 1 - Р(А)Р(В) = 1 - 0,2 • 0,1 = 0,98.
Пусть событие А может произойти только вместе с одним из п по-
попарно несовместных событий Н1} #2, ..., Нп. В этом случае вероят-
вероятность события А определяется по формуле полной вероятности:
События Н{ по отношению к событию А называются гипотезами.
Если в результате опыта событие А произошло, то вероятности
гипотез Нг можно «переоценить», т.е. найти условные вероятности
гипотез Р(Н{/А) (при условии, что событие А произошло). Эти
«новые» вероятности вычисляются по формуле Бейеса:
1=1
Пример 3. В ящике содержатся одинаковые изделия, изготовленные двумя
автоматами: 40% изделий изготовлено первым автоматом, остальные— вторым.
Брак в продукции первого автомата составляет 3%, второго— 2%. Требуется
найти:
а) вероятность того, что случайно выбранное изделие окажется бракован-
бракованным;
б) вероятность того, что случайно выбранное изделие изготовлено первым
автоматом, если оно оказалось бракованным.
Решение. Обозначим через А событие, состоящее в том, что случайно
выбранное изделие— бракованное, а через Н1 иЯ2 — события, состоящие в том,
что это изделие изготовлено соответственно первым и вторым автоматами. Тогда
а) по формуле полной вероятности
Р(А) = Р{Н1)Р{А/Н1) + Р(Н2)Р(А/Н2) = 0,4 • 0,03 + A - 0,4) • 0,02 = 0,024;
б) по формуле Бейеса
А) - Р(Н1)РЩН1) _ 0,4-0,03 _ 1
А)- - -.
Вероятность того, что в п независимых испытаниях событие А
(«успех») наступит ровно к раз, определяется по формуле Бернулли:
Рп{к) = Скпрк{\-р)п-к, где Скп= fc,(Tinlfe!),
128 Теория вероятностей •
р— вероятность успеха в одном испытании, С% — число сочетаний из
п элементов по к.
Вероятности Рп(к) в последней формуле называются: биномиаль-
п
ными. Для них выполняется равенство ^ Рп(^) = 1-
/с=0
Пример 4L Найти вероятность того, что при 10 бросаниях монеты «орел»
выпадет 5 раз.
Имеем п = 10, к = 5, р = у
вероятность равна Р10E) = С?о (-§-M (i) = J?jLi?L . -^ = JbL
Если п велико, а р мало, то справедлива приближенная формула
Пуассона (для подсчета вероятностей, относящихся к редким собы-
событиям) :
к\
Решение. Имеем п = 10, к = 5, р = у. Тогда по формуле Бернулли искомая
в которой Л = пр — среднее число успехов в п испытаниях.
Для приближенного вычисления Рп(к) при больших п можно
применять локальную формулу Муавра —Лапласа:
(к — прJ
Вероятность того, что в п независимых испытаниях число успе-
успехов к находится между кх и к2) приближенно вычисляется по инте-
интегральной формуле Муавра —Лапласа:
1 Г ( t2 \
Здесь Ф(х) = ,— / ехр (—— ) dt — функция Лапласа, для которой
у2тг Jo v' * '
имеются таблицы.
14.4. Математическое ожидание
и дисперсия
> Случайные величины и их числовые характеристики.
Пусть П = {lj} — пространство элементарных событий. Случайной
величиной X называется числовая функция X(lj), определенная на
множестве Q, такая, что для любого х определена вероятность
Р{Х < х} = Р{и : Х{ш) < х}. Эта вероятность Р{Х < х} = F(x)
называется функцией распределения случайной величины Д; она
имеет следующие свойства:
2)
3)
4)
F(-oo) = (
P{a^.X <
), F(+oo) = 1,
l 2/ При X i ^^ •*'9
:b} = Flb)-F(a).
14.4. Математическое ожидание и дисперсия
129
Если X — дискретная случайная величина, принимающая значе-
значения хх, х2, ..., хп, .... с вероятностямир1,р2, • • • ,РП, • • •, т.е. имеющая
ряд (закон) распределения, задаваемый таблицей
X
Pi
Р2
Рп
(?* = ')•
то функция распределения имеет вид
F(x) = P{X<x}=
Непрерывная случайная величина задается либо функцией распре-
распределения F(x), либо плотностью вероятности f(x), которые связаны
формулами
f(x) = F'(x), F(x)= / f(x)dx.
j
— со
Плотность вероятности имеет следующие свойства:
+ ОО
2) I f(x)dx = l,
= [ f(x)dx.
J
3)
> Математическим ожиданием случайной величины X называ-
называется число MX, которое вычисляется по формулам
iP{ (дискретный случай),
ОО
MX— I xf(x)dx (непрерывный случай),
— ОО
где ряд* и несобственный интеграл предполагаются сходящимися.
Свойства математического ожидания:
1) МС = С (С = const), 2) М(СХ) = С'МХ,
3) M(X±Y) = MX±MY, 4) M{XY) = MX -MY.
В последней формуле считается, что X и У — независимые случайные
величины, т.е. такие, для которых при любых х и у справедливо
равенство Р{Х < х, У < у} = Р{Х < x}P{Y < у}.
Ряд может содержать как бесконечное, так и конечное число членов.
5 А. Д. Полянин, В. Д. Полянин и др.
130 Теория вероятностей
> Дисперсией случайной величины X называется число
DX = М{Х-МХJ)
которое вычисляется по формулам
DX = 2L^(xi — MX) р{ (дискретный случай),
7
DX = / (а? - MXJf(x) dx (непрерывный случай).
— оо
Для вычисления дисперсии можно также использовать выражение
DX = M(X2)-{MXJ.
Дисперсия имеет следующие свойства:
1)DC = O (C = const), 2)D{CX) = C2>DX, 3) D(X±Y) = DX+DY.
Последняя формула справедлива для независимых случайных величин
ХиУ.
Среднее квадратичное отклонение случайной величины X опре-
определяется формулой а = y/DX.
> Нормальный закон распределения случайной величины.
Говорят, что случайная величина X распределена по нормальному
закону (или закону Гаусса), если ее плотность вероятности имеет вид
„ , _ 1 Г (х - тJ
где т = MX, a = VDX.
Вероятность того, что нормально распределенная величина X
принимает значение в интервале (а, 6), определяется по формуле
а —
где Ф(я?) — функция Лапласа.
Пример. При изготовлении некоторого изделия его вес X подвержен случай-
случайным колебаниям. Считаем, что стандартный вес изделия равен 30 г, его среднее
квадратичное отклонение равно 0,7 г, а случайная величина X распределена по
нормальному закону. Найти вероятность того, что вес наугад выбранного изде-
изделия находится в пределах от 28 до 31 г.
Решение. Полагая в последней формуле m = 30, а = 0,7, а = 28, Ь = 31,
получим
= ФA,43) - Ф(-2,86) = ФA,43) + ФB,8б) « 0,424 + 0,498 = 0,922.
Список литературы 131
14.5. Закон больших чисел
Неравенство Чебышева. Вероятность того, что отклонение слу-
случайной величины X от ее математического ожидания по абсолютной
величине меньше числа е > О, удовлетворяет неравенству
P{\X-MX\<e}^l-DX/e2.
Теорема Чебышева (закон больших чисел). Пусть ХХ) Х2) ...,
Хп — последовательность попарно независимых случайных величин с
одним и тем же математическим ожиданием MX = га и дисперсиями,
ограниченными одной и той же константой. Тогда для любого е > О
имеем
ton Р{
п-юо I п
4 *=1
-m
< Л = 1.
Таким образом, хотя отдельные случайные величины могут прини-
принимать значения, далекие от постоянной га, среднее арифметическое
достаточно большого числа случайных величин с большой вероятно-
вероятностью принимает значение, близкое к математическому ожиданию.
Теорема Бернулли (является следствием теоремы Чебышева).
Если в каждом из п независимых испытаний вероятность р наступле-
наступления события А постоянна, то сколь угодно близка к единице вероят-
вероятность того, что отклонение относительной частоты k/п события А от
его вероятности р будет по абсолютной величине сколь угодно малым,
если число испытаний достаточно велико: lim Р<\ р < е\ = 1.
п-юо Lin J
Теорема Бернулли объясняет, почему относительная частота при
большом числе испытаний обладает свойством устойчивости и оправ-
оправдывает статистическое определение вероятности (см. разд. 14.2).
Список литературы
Бронштейн И. Н., Семендяев К. А. Справочник по математике для инжененов и
учащихся втузов. — М.: Наука, 1986. — 544 с.
Бугров Я. С, Никольский С. М. Высшая математика. Элементы линейной
алгебры и аналитической геометрии. — М.: Наука, 1988. — 222 с.
Бугров Я. С, Никольский С. М. Высшая математика. Дифференциальное и
интегральное исчисление. — М.: Наука, 1988. — 440 с.
Бугров Я. С, Никольский С. М. Высшая математика. Дифференциальное уравне-
уравнения. Кратные интегралы. Ряды. Функции комплексного переменного. — М.:
Наука, 1989. — 464 с.
Венцелъ Е. С,. Овчаров Л. А. Теория вероятностей и ее инженерные приложе-
приложения. — М.: Наука, 1988.-—480 с.
Воробьев Н. Н. Теория рядов. — М.: Наука, 1988. — 408 с.
Выгодский М. Я. Справочник по высшей математике. —М.: Наука, 1995.—-870 с.
132 Список литературы
Градштейн И. С, Рыжик И. М. Таблицы интегралов, сумм, рядов и произведе-
произведений.— М.: Наука, 1975.
Двайт Г. Б. Таблицы интегралов и другие математические формулы. — М.:
Наука, 1977. —224 с.
Ефимов Н. В. Краткий курс аналитической геометрии. — М.: Наука, 1975.—
272 с.
Зайцев В. Ф., Полянин А. Д. Справочник по обыкновенным дифференциальным
уравнениям. Точные решения. — М.: Наука, 1995. — 560 с.
Ильин В. А., Позняк Э. Г. Аналитическая геометрия. — М.: Наука, 1981. — 232 с.
Камке Е. Справочник по обыкновенным дифференциальным уравнениям. — М.:
Наука, 1976. —704 с.
Корн Г., Корн Т. Справочник по математике.— М.: Наука, 1984. — 832 с.
Кудрявцев Л. Д. Курс математического анализа, тт. 1, 2, 3. — М.: Высшая школа,
1988.
Кудрявцев Л. Д. Краткий курс математического анализа. — М.: Наука, 1989.—
735 с.
Пискунов Н. С. Дифференциальное и интегральное исчисления для втузов, тт. 1,
2. —М.: Наука, 1985.
Прудников А. П., Брычков Ю. А., Маричев О. И. Интегралы и ряды. Элементар-
Элементарные функции. — М.: Наука, 1981.
Сборник задач по математике для втузов, ч. 1, 2, 3. / Под ред. Ефимова А. В.,
Демидовича Б.П. — М.: Наука, 1990.
Солодовников А. С. Теория вероятностей.— М.: Просвещение, 1983. — 207 с.
Тихонов А. П., Васильева А. Б., Свешников А. Г. Дифференциальные уравне-
уравнения.— М.: Наука, 1985. — 231 с.
Чистяков В. П. Курс теории вероятностей. — М.: Наука, 1987. — 240 с.
Эльсгольц Л. Э. Дифференциальные уравнения и вариационное исчисление. — М.:
Наука, 1965. —424 с.
ФИЗИКА
Основные обозначения
А — работа; амплитуда колебаний
а — ускорение;
ап, аг — нормальное и тангенциальное ускорения;
В —- магнитная индукция;
В — модуль магнитной индукции; яркость;
Ь — Постоянная Вина;
С — теплоемкость; электроемкость;
с — скорость света в вакууме; удельная теплоемкость;
D — электрическое смещение;
Е — энергия; освещенность;
Е — напряженность электрического поля;
§? — электродвижущая сила источника (ЭДС);
е — элементарный заряд;
г — сила;
]? — ускорение свободного падения; напряженность гравитационного
поля;
G — плотность состояний;
И — напряженность магнитного поля;
Л, К — постоянная Планка;
/ — сила электрического тока; интенсивность волны; интенсивность
световых колебаний; интенсивность лучистого потока;
12 — момент инерции относительно оси z\
i — линейная плотность поверхностного тока;
J — энергетическая сила источника света; сила света источника;
J — намагниченность магнетика;
t
j — плотность электрического тока;
К — модуль всестороннего сжатия;
^ — жесткость; волновое число; постоянная Больцмана; коэффициент в
законе Кулона;
к — волновой вектор;
L — индуктивность;
L — момент импульса относительно точки;
L, — момент импульса относительно оси z;
М — момент силы относительно точки;
Mz — момент силы относительно оси z\
т — масса материальной точки, масса тела;
N — число частиц;
АГА — число Авогадро;
п — концентрация; показатель преломления;
rt — вектор нормали;
Р — мощность;
Р — поляризованность диэлектрика;
р — давление;
р г— импульс; электрический дипольный момент;
рт — магнитный момент витка с током;
Q — количество теплоты;
Q, q — электрический заряд;
jR — универсальная газовая постоянная; энергетическая светимость;
R, г — сопротивление;
г — радиус-вектор;
г,,, гх — излучательная способность;
5 — энтропия;
S — вектор Пойнтинга;
Т — абсолютная температура; период колебаний;
и — плотность лучистой энергии;
U — внутренняя энергия; напряжение;
и — вектор Умова;
V — объем;
гТ, V — скорость, V={vx1 vy, vz};
W — энергия электромагнитного поля;
w — объемная плотность энергии электромагнитного поля;
а — коэффициент теплового расширения;
Р — коэффициент затухания;
7 — гравитационная постоянная; показатель адиабаты;
е — угловое ускорение; энергия молекулы; диэлектрическая проница-
проницаемость;
е0 — электрическая постоянная;
г) — коэффициент полезного действия; вязкость;
х — диэлектрическая восприимчивость;
Л — длина волны; длина свободного пробега; линейная плотность заря-
заряда; логарифмический декремент затухания;
д — молярная масса; химический потенциал; магнитная проницаемость;
ц0 — магнитная постоянная;
и — количество вещества; частота колебаний;
? — смещение точек волны;
р — плотность массы; удельное сопротивление; плотность заряда;
а — поверхностная плотность заряда; коэффициент поверхностного на-
натяжения; постоянная Стефана— Больцмана;
Ф — поток вектора напряженности; поток лучистой энергии; термоди-
термодинамический потенциал Гиббса;
ф — удельный термодинамический потенциал;
V? — потенциал поля; фаза колебаний;
X — магнитная восприимчивость;
Ф — свободная энергия; потокосцепление;
П — телесный угол;
ш — угловая скорость; циклическая частота колебаний;
dx
х — первая производная, х = —;
.. $.
х — вторая производная, х = ;
_ at*
а • Ь — скалярное произведение векторов;
S X t — векторное произведение векторов;
=Ф- — следует, следовательно;
( ) — среднее значение.
1.1. Кинематика точки 135
1. Физические основы механики*
Механическим движением называется изменение положения тела
по отношению к другим телам. Как видно из определения, механи-
механическое движение относительно. Для описания движения необходимо
определить систему отсчета, которая включает в себя тело отсчета,
жестко связанную с ним систему координат и набор синхронизиро-
синхронизированных между собой часов. Механика изучает движение модельных
объектов—точек и твердых тел. Положение этих объектов опреде-
определяется конечным числом независимых параметров (т.е. они обладают
конечным числом степеней свободы). Кинематика занимается описа-
описанием движения без выяснения его причин.
1.1. Кинематика точки
> Основные определения. Скорость и ускорение. Материаль-
Материальной точкой называется тело, размерами которого при описании его
движения можно пренебречь. Положение точки в момент времени t
задается радиусом-вектором г, проведенным,
к этой точке из начала координат (рис. 1).
В процессе движения конец радиуса-вектора
описывает пространственную кривую — тра-
траекторию. В прямоугольной декартовой си-
системе координат положение радиуса-вектора
задается тремя его проекциями на оси ¦— ко-
координатами я, у, z. Движение точки полно-
полностью определяется заданием закона движе-
/ 17 *
ния — одной векторной функции f(t) или трех Рис 1#
скалярных функций #(t), y(t), z(t). Для ком-
компактной записи радиуса-вектора (или любого вектора) через его про-
проекции используют единичные орты: г = хг + yj + zk. Путь — длина
участка траектории, пройденного точкой за рассматриваемый интер-
интервал времени. Путь — величина скалярная, неотрицательная и не убы-
убывающая со временем. Перемещением точки называется вектор Дг,
соединяющий начальное положение точки с конечным и равный раз-
разности раДиусов-векторов в конечный и начальный моменты времени.
Скорость точки равна производной от радиуса-вектора по вре-
времени: v = dr/dt. Скорость направлена по касательной к траектории.
Средняя (по времени) скорость за конечное время At определяет-
определяется как отношение перемещения к интервалу времени: vcp = Ar/At.
В курсах физики, читаемых в вузах, основы механики излагаются иначе, чем
в курсах теоретической механики.
136 Физические основы механики
(Средняя скорость пути равна отношению пройденного пути к ин-
интервалу времени.) Движение называют равномерным, если v = const.
Равномерное движение происходит по прямой. Равномерным движе-
движением по заданной криволинейной траектории называют движение с
постоянным модулем скорости. (Пример — равномерное движение по
окружности.)
Ускорение точки равно производной от скорости по времени:
а = dv/dt. Ускорение лежит в той же плоскости, что и участок тра-
траектории, и направлено «внутрь» траектории (в частном случае, ког-
когда траектория является прямой линией, ускорение направлено вдоль
этой прямой). Проекцию ускорения на направление
скорости называют тангенциальным ускорением и
обозначают ат, она определяет быстроту изменения
модуля скорости и равна производной от модуля ско-
скорости: аТ = dv/dt. Другую компоненту ускорения,
перпендикулярную скорости, называют нормальным
ускорением (рис. 2) и обозначают ап; она характе-
характеризует быстроту изменения направления скорости и
равна ап = v2/R, где R — радиус кривизны траекто-
траектории (т.е. радиус окружности, наиболее близко примыкающей к траек-
траектории в данной точке). Среднее ускорение за время At определяется
как аср = Av/At. Движение называют равноускоренным) если а = const.
Равноускоренным движением вдоль заданной траектории называют
движение сат= const.
> Прямая и обратная задачи кинематики. Задачу определения
характеристик движения по известному закону движения называют
прямой задачей кинематики:
Пример 1. Пусть закон движения имеет вид: х = Hcoswt, у = Rsinwt. Найти
уравнение траектории, скорость и ускорение.
Решение. Исключая время (с помощью тождества sin2 wt + cos2 uit = 1),
находим уравнение траектории: х2 + у2 = Я2 (окружность радиуса Я).
Дифференцируя исходные выражения по времени, получим
<?х , dy
vx — —— = —tuRsinujt, Vy = = ujRcoswt (компоненты скорости),
ax — "~ГТ" = —^2^cosc»;tf, ay = ------ = — uj2Rsinu>t (компоненты ускорения).
Модуль скорости v = \Jv\ + Vy = u>R и модуль ускорения а = и;2Я не
зависят от времени и связаны соотношением а = v2/R. Ускорение направлено
перпендикулярно скорости к центру окружности: а = —ш2г.
Задачу определения закона движения по известному ускоре-
ускорению a(t) называют обратной задачей кинематики. Для однозначного
решения этой задачи нужно знать начальные условия —положение и
скорость точки в начальный момент времени.
1.1. Кинематика точки 137
Пример 2. Равноускоренное движение. Пусть известны ускорение точки
а = const и ее начальные скорость #0 и положение г0. Найти траекторию и закон
движения точки.
Решение. Последовательно интегрируя, находим сначала скорость точки
t t
v = J a dt = tf0 + at, а затем ее положение f = J г> eft = f0 + €T01 + у at2.
t0 to
Точка движется в плоскости векторов v0, at по параболе, что видно в системе
координат, где ось у направлена по а, а ось х — перпендикулярно 3.
Во многих случаях задача кинематики не сводится ни к прямой,
ни к обратной. В этом случае для определения закона движения при-
приходится решать дифференциальное уравнение. Иногда это уравнение
можно решить разделением переменных.
Пример 3. Лодка тормозится силой, пропорциональной квадрату скорости.
Найти зависимость скорости движения лодки от времени, если начальная ско-
скорость равна Vq .
Решение. Второй закон Ньютона приводит к уравнению dv/dt = — av2.
Разделяя переменные, получим: dv/v2 = —adt. Интегрируя левую часть уравнения
от v0 до v, а правую—от 0 до t, находим (г»" — fj) = at, т.е. v = г>0/A + voat).
Интегрируя далее, можно определить закон движения лодки.
> Движение по окружности. Движение по окружности можно
описывать с помощью угловых переменных: угла поворота <р, угловой
скорости и> = dip/it и углового ускорения е = du/dt. Если угол
измерять в радианах, то длина дуги равна 5 = (pR. Отсюда следует,
что
v^ujR, аг = -^- = еЯ, ап = — = uj2R.
Величина ап называется центростремительным ускорением.
Формулы для нормального и тангенциального ускорений можно вывести, если
записать скорость в виде fi = ит*, где ?— единичный вектор, направленный вдоль
скорости. Получим а = (dv/dt)?+v(d?/dt) и учтем, что dr/dt = n(dy>/dt) = n(v/R),
где ft — единичный вектор, перпендикулярный к скорости и направленный вдоль
радиуса. Этот вывод справедлив и для произвольной траектории, если принять
соотношение df = H(ds/R) за определение как направления нормали п, так и
радиуса кривизны Я.
> Относительность движения. Сложение скоростей. Бели
движение точки рассматривается из двух систем отсчета К и К', оси
которых остаются все время параллельными друг другу, то между
скоростями точки v и {?' относительно этих систем отсчета в каждый
момент времени выполняется соотношение
v = vf + vK) A)
где vK —скорость системы К' относительно системы К. Такое же
соотношение выполняется и для ускорений: а = а' + ак.
138 Физические основы механики
1.2. Кинематика твердого тела
> Основные определения. В механике твердым телом называют
идеализированное тело, расстояние между любыми двумя точками
которого не меняется (т.е. отсутствуют деформации). Выделяют два
простых движения твердого тела — поступательное и вращательное.
При поступательном движении отрезок, соединяющий любые две
точки тела, перемещается параллельно самому себе. Значит, все точ-
точки тела движутся одинаково, т.е. достаточно описать движение одной
точки. При вращательном движении все точки твердого тела (или
его мысленного продолжения), принадлежащие некоторой прямой —
оси вращения, остаются неподвижными. Остальные точки тела дви-
движутся по окружностям, перпендикулярным оси вращения. Угловые
скорости всех точек в каждый момент времени одинаковы, поэтому
вводят вектор угловой скорости с2, направление которого вдоль оси
вращения определяется по правилу буравчика. Распределение линей-
линейных скоростей точек тела можно представить с помощью векторного
произведения*
v = uj х ?, B)
где радиусы-векторы проводятся из любой точки на оси. В случае
неподвижной оси вращения вектор углового ускорения е = duS/dt
также направлен вдоль оси.
> Плоское движение твердого тела определяют как движение,
при котором скорости всех точек тела параллельны некоторой плос-
плоскости. Если с любой точкой тела (или его мысленного продолжения)
связать поступательно движущуюся систему координат, то относи-
относительное движение будет чистым вращением вокруг неподвижной оси,
перпендикулярной плоскости движения.
Пример 1. Качение колеса без проскальзыва-
проскальзывания со скоростью v удобно представить как сум-
сумму поступательного движения со скоростью v и
вращательного движения с угловой скоростью ш
(рис. 3). Скорость любой точки относительно зем-
земли можно найти по закону сложения скоростей A).
В частности, скорость нижней точки колеса О'
должна быть равна нулю, откуда следует связь
между v и ш: v = u>R. Ускорения всех точек напра-
направлены к центру колеса.
> Мгновенная ось вращения. Если какая-то точка тела (или его
мысленного продолжения) в данный момент неподвижна, то суще-
существует проходящая через нее прямая неподвижных точек, которую
* Это уравнение является частным случаем важной математической формулы
dA/dt = ш X Л, выражающей производную, по времени от любого вектора Л,
который вращается с угловой скоростью ш.
1.2. Кинематика твердого тела 139
называют мгновенной осью вращения. Распределение скоростей в
этот момент описывается формулой B). Мгновенная ось и й могут
менять свое положение как в пространстве, так и относительно тела.
В частности, в примере 1 можно получить скорости всех точек ко-
колеса как результат чистого вращения'относительно мгновенной оси,
проходящей через точку касания*0'. Угловое ускорение Сможет быть
непараллельно мгновенной оси.
р> Сложение угловых скоростей. Движение относительно
вращающейся системы отсчета. Движение твердого тела с не-
неподвижной точкой представляет собой в каждый момент времени
чистое вращение вокруг мгновенной оси. Если это движение мож-
можно представить как вращение с угловой скоростью CS1 относительно
системы отсчета, вращающейся с угловой скоростью а?2, то резуль-
результирующая угловая скорость равна Q = й1 + Q2- Для Доказательства
надо обобщить закон сложения скоростей A) на непоступательное
движение системы отсчета:
у = Я+Яп) C)
отн ' пер* V /
где vne? — переносная скорость данной точки системы отсчета. В
случае вращающейся системы отсчета
v = v + Q х г U)
ОТН ' V /
Когда относительное движение представляет собой чистое вращение,
получим v=:uS1 xr+c32xf = (u^ +п?2)хг, т.е. результирующее движение
представляет собой вращение с угловой скоростью (ш1 + п?2).
Пример 2. Рассмотрим круговой конус с углом полураствора а, который
положили на бок и покатили без проскальзывания так, что его ось вращается
с угловой скоростью ш1 (рис. 4). Найти угловую скорость и угловое ускорение
конуса.
Решение. Во вращающейся системе |
отсчета, в которой ось конуса неподвиж-
неподвижна, происходит вращение вокруг этой оси
с угловой скоростью ш2. Связь между шх
и и>2 найдем из условия неподвижности
точки А: шх1 = о;2г, или их = u^sina.
Из этого соотношения следует, что век-
вектор ш = шх + ?2 направлен горизонталь-
горизонтально, по линии соприкосновения конуса с
плоскостью, которая, конечно же, явля-
является мгновенной осью вращения. Вклад
в угловое ускорение дает только враще- ""¦"" "
ние вектора ш2 с угловой скоростью шх: Рис. 4.
е = duj/dt = u>i X п?2 f е = ^>\ ^2 cos a •
Формула D) является частным случаем формулы для производной
по времени от любого вектора А :
dt fdl\ . -*
140 Физические основы механики
где первый член — скорость изменения А относительно вращающей-
вращающейся системы координат (см. также сноску к формуле B)).
При изучения неинерциальных систем отсчета (см. разд. 1.9) нам понадо-
понадобится связь между ускорениями точки в неподвижной и вращающейся системах
отсчета. Ее можно получить, применив E) к каждому из двух членов в D):
Последний член представляет собой переносное ускорение данной точки системы
отсчета (центростремительное ускорение). Видно, что кроме относительного и
переносного ускорений, возникает дополнительное слагаемое, которое называют
кориолисовъш ускорением.
1.3. Динамика
»> Первый закон Ньютона утверждает, что существуют такие
системы отсчета, в которых любое тело, не взаимодействующее с
другими телами, движется равномерно и прямолинейно. Системы от-
отсчета, существование которых постулирует этот закон, называются
инерциалъными.
Из закона сложения скоростей видно, что любая система отсче-
отсчета, движущаяся с постоянной скоростью относительно инерциаль-
ной, также является инерциальной. Практически точно инерциальной
можно считать гелиоцентрическую систему, связанную с Солнцем и
удаленными звездами. Земля является инерциальной системой толь-
только приближенно, вследствие суточного вращения ускорение точек ее
поверхности достигает 0,034 м/с2.
»> Масса. Имцульс. Из первого закона Ньютона следует, что в
инерциальных системах отсчета ускорение тела возникает только в
результате его взаимодействия с другими телами. Это ускорение за-
зависит от инертности тела, т.е. его способности сопротивляться из-
изменению скорости, а также от интенсивности и направления действия
на него других тел.
Масса тела т — это скалярная положительная величина, харак-
характеризующая инертность тела. Эксперименты показывают, что при
взаимодействии двух тел их ускорения ах и 52 в инерциальной си-
системе отсчета направлены в противоположные стороны, а отношение
модулей ускорений al/a2 не зависит от характера и интенсивности
взаимодействия. Это позволяет определить отношение масс двух про-
произвольных тел как величину, обратную отношению ускорений, возни-
возникающих при их взаимодействии друг с другом: т1/т2 = а2/а1. Чтобы
определить абсолютную величину массы т, необходимо определить
эталон массы. В системе СИ за эталон массы принимают 1 килограмм
A кг). Масса обладает свойством аддитивности: сумма масс частей,
1.3. Динамика 141
на которые можно разделить тело, равна массе всего тела. Как по-
показывает теория относительности, это свойство является приближен-
приближенным и нарушается при сильном взаимодействии между частями тела.
Например, масса ядра оказывается меньше суммы масс образующих
его нуклонов.
Импульсом частицы называют векторную величину, равную про-
произведению массы частицы на ее скорость:
р — mv. F)
Определение F) действует только при и<с, где с — скорость света;
более общее определение, верное при любых v < с, вводится в теории
относительности.
> Сила. Силой, действующей на тело массой т при его взаимодей-
взаимодействии с другим телом, назовем величину F = та, где а — ускорение,
сообщенное этой силой телу т в инерциальной системе отсчета. Бо-
Более общее определение имеет вид: F = dp/dt. В ньютоновской дина-
динамике оба определения эквивалентны, но в динамике теории относи-
относительности определение импульса изменяется, и оказывается верным
только второе определение. В системе СИ сила измеряется в ньюто-
ньютонах (Н = кг • м/с2).
Изменение импульса точки за время t под действием силы F рав-
равно интегралу от силы: Ар = p(t) — р@) = /0* Fdt. Эту величину назы-
называют импульсом силы. Средняя (по времени) сила равна Fcp = Ар/At.
> Второй закон Ньютона. Если на материальную точку одно-
одновременно действуют N тел с силами г15 ..., FN, то ускорение тела а
определяется векторной суммой этих сил:
.*= —= -?3 — t = Et
т т *-** 3 dt ^—' 3
Силу F называют равнодействующей (или результирующей) сил
Fl5 ..., FN. Второй закон Ньютона называют уравнением движения
тела, так как он позволяет (в принципе) рассчитать движение тела
или системы тел, но только в том случае, если известна зависимость
сил взаимодействия между телами от их взаимного расположения
и скоростей. Ниже мы кратко напомним свойства сил, которые
возникают при решении механических задач.
> Третий закон Ньютона утверждает, что силы гАВ и FBA, с
которыми действуют друг на друга два взаимодействующих тела А
и В, направлены вдоль одной прямой в противоположные стороны и
равны между собой по модулю:
142 Физические основы механики
> Дальнодействие и причинность. Поле. В ньютоновской меха-
механике третий закон Ньютона выполняется для любых взаимодействую-
взаимодействующих тел независимо от природы взаимодействия и от того, находятся
ли тела в непосредственном контакте или взаимодействуют на рас-
расстоянии с помощью гравитационных или электромагнитных сил. Од-
Однако выполнение этого закона для дальнодействующих сил означает
мгновенную передачу информации об изменении положения тел. Са-
Само понятие дальнодействия противоречит постулатам теории отно-
относительности, запрещающим передачу информации со скоростью, пре-
превышающей скорость света. Современная физика отказалась от даль-
дальнодействия, введя нового участника взаимодействия — материальное
силовое поле (электрическое, гравитационное и др.), заполняющее все
пространство. На тело в данной точке пространства действуют не
удаленные тела, а поле в окрестности этой же точки; в свою очередь
это поле создается удаленными телами (источниками поля). Измене-
Изменение поля передается от точки к точке и распространяется с конечной
скоростью (скоростью света). В ньютоновской механике (при малых
скоростях v<c) можно пользоваться как дальнодействующими си-
силами, так и полем; удобно изучать движение точки (или системы то-
точек) во внешнем стационарном поле) создаваемом неподвижными ис-
источниками (пример: поле тяжести Земли). Силовое поле называется
центральным, если сила, действующая со стороны поля на помещен-
помещенную в него материальную точку, зависит только от расстояния г от
точки до силового центра и направлена в сторону центра:
где F(r) = Fr(r) — проекция силы на радиальное направление. Поле
называется однородным в области пространства, если сила одинакова
во всех точках этой области: F — const.
> Силы природы. Все разнообразие действующих в природе сил
можно свести к нескольким фундаментальным взаимодействиям (гра-
(гравитационному, слабому, электромагнитному и сильному). Однако для
практических целей такой подход непригоден, и кроме фундамен-
фундаментальных дальнодействующих сил (в механике это сила тяготения),
надо знать свойства различных сил, возникающих при контакте ма-
макроскопических тел. Перечислим кратко силы, возникающие при ре-
решении механических задач (их свойства изучают в курсе элементар-
элементарной физики в школе).
1. Сила тяжести тд (сила тяготения у поверхности Земли).
2. Сила упругости при продольной деформации пропорциональна
деформации: Fynp = — kx) где к — жесткость (закон Гука). В пределе
бесконечной жесткости возникают сила (нормальной) реакции N или
1.4. Закон сохранения импульса 143
сила натяжения нити Т, которые определяются из самих уравнений
движения. (Силы такого типа называют реакциями связей.)
3. Сила сухого трения. Сила трения скольжения: FTp = fi1N) где
fi1 — коэффициент трения скольжения. Сила трения покоя FTp ^ /i2AT,
где /i2 — коэффициент трения покоя (при решении задач считают, что
Iх 1 = А^)- Сила трения покоя также относится к типу реакции связей.
4. Сила сопротивления движению в жидкости или газе зависит
от скорости и поперечных размеров тела. При малых скоростях и ма-
малых размерах сила пропорциональна скорости (сила вязкого трения),
при больших скоростях сила пропорциональна площади поперечного
сечения и квадрату скорости (сила лобового сопротивления).
> Принцип относительности Галилея. Принцип относительно-
относительности Галилея утверждает, что все законы механики имеют одинако-
одинаковый вид во всех инерциальных системах отсчета. Пусть система К1
движется относительно системы К с постоянной скоростью V. Вы-
Выберем системы координат с параллельными осями, причем оси х и х'
направим вдоль V; время будем отсчитывать от момента полного
совмещения осей. Тогда координаты и время события в системе К'
будут выражаться через координаты и время в К с помощью пре-
преобразований Галилея:
х1 = х - Vt, у' = у, z1 = z, tf = t. G)
При преобразованиях Галилея остаются неизменными разность ско-
скоростей двух точек и расстояние между ними; значит, не меняются
силы взаимодействия между материальными точками. Кроме того,
преобразования Галилея не меняют ускорения точки. Значит, не ме-
меняются обе части равенства, выражающего второй закон Ньютона,
т.е. уравнение движения имеет одинаковый вид в разных системах
отсчета (инвариантно относительно преобразований Галилея).
Преобразования Галилея основаны на утверждениях о независи-
независимости хода времени и длины отрезков от системы отсчета, которые
считались неотъемлемыми свойствами пространства и времени. Тео-
Теория относительности пересматривает представления о пространстве
и времени и показывает, что преобразования Галилея верны только
при V <& с; их заменяют преобразования Лоренца, верные при любых
скоростях V < с.
1.4. Закон сохранения импульса
> Система материальных точек. Центр масс. Пусть систе-
система состоит из N материальных точек. Силы, действующие на j-ю
точку, подразделяются на внутренние i^J., действующие со сторо-
стороны остальных точек системы, и внешние, результирующую которых
144 Физические основы механики
обозначим* F?. В соответствии с третьим законом Ньютона сум-
сумма внутренних сил равна нулю, т.е. сумма всех сил, действующих на
точки системы, равна сумме внешних сил. Если тела системы не вза-
взаимодействуют с внешними телами, то систему называют замкнутой
(или изолированной).
Центром масс (центром инерции) системы материальных то-
точек т1) ..., mN называют точку, положение которой определяется
радиусом-вектором
Связанную с центром масс поступательно движущуюся систему от-
отсчета будем называть системой центра масс.
Если масса распределена непрерывно (в пространстве, по плоско-
плоскости, вдоль линии), то составляющие систему материальные точки по-
получаются при мысленном разделении объема тела на маленькие обла-
области. Распределение массы по объему задают с помощью плотности:
dm = p(r)dV. Например, определение A) для непрерывно распреде-
распределенной массы принимает вид
Jfp(r)dV
Тело с постоянной плотностью называют однородным.
> Импульс. Импульс системы определяется как сумма импульсов
составляющих его частиц:
Продифференцировав уравнение (8) по времени, найдем, что импульс
системы выражается через скорость центра масс:
р=туц) (9)
где т — масса системы. Значит, в системе центра масс импульс
системы точек равен нулю.
Просуммируем уравнение второго закона Ньютона dp/dt = F по
всем точкам системы и учтем, что все внутренние силы уничтожа-
уничтожаются:
(скорость изменения импульса системы равна результирующей внеш-
внешней силе).
* Верхние индексы «i* и «е» у сил происходят от латинских слов externus ¦
внешний и internus — внутренний.
1.4. Закон сохранения импульса 145
»> Закон сохранения импульса. Из уравнения A0) следует, что
импульс замкнутой системы сохраняется, Закон сохранения импуль-
импульса является следствием однородности пространства (равноправия
всех его точек) и поэтому носит универсальный характер. Область
действия этого закона выходит за пределы ньютоновской механики,
в рамках которой мы его вывели. Даже при учете конечной скорости
распространения сигнала (явление запаздывания), которое приводит
к нарушению третьего закона Ньютона, закон сохранения импульса
выполняется точно, если учесть импульс передатчика сигнала — си-
силового поля.
Импульс незамкнутой системы сохраняется в следующих слу-
случаях:
1. Если сумма внешних сил равна нулю.
2. Если результирующая внешняя сила перпендикулярна некото-
некоторому направлению, то сохраняется не вектор импульса системы, а
проекция импульса системы на это направление.
3. Если взаимодействие продолжается очень короткое время Д2,
а внешние силы Fe ограничены*, то изменением импульса системы
FeAt можно пренебречь (считать, что Д* —> 0).
> Движение центра масс. Продифференцировав по времени
уравнение (9), с учетом A0) получим уравнение движения центра
масс:
(центр масс движется так, как двигалась бы воображаемая матери-
материальная точка с массой, равной массе системы, если к ней приложить
результирующую внешнюю силу).
Пример 1. Рассмотрим тонкий стержень длиной / и массой га, вращающий-
вращающийся в горизонтальной плоскости вокруг одного из своих концов с угловой скоро-
скоростью и>. Найти силу натяжения в середине стержня.
Решение. Центр масс внешней половины стержня движется по окружности
радиусом ¦?-/ под действием только одной внешней силы — искомой силы натяже-
натяжения. Из уравнения A1) получим: Fu = (^"m)w2("f =¦ \rnuj2l.
Отметим, что центр масс замкнутой системы движется равно-
равномерно, следовательно, система центра масс является инерциальной.
> Реактивное движение. Изменение скорости корабля в глубо-
глубоком космосе возможно только за счет выбрасывания наружу части
массы — ракетного топлива. Уравнение движения космолета при на-
наличии внешней силы F и реактивной струи легко получить, записав
* При этом импульсы частиц системы могут заметно измениться под действием
очень больших внутренних сил (взрыв, удар).
146 Физические основы механики
закон изменения импульса C) в инерциальной системе отсчета, свя-
связанной в данный момент с кораблем:
где и — скорость струи относительно корабля, a AM — масса выбро-
выброшенного за время Д* топлива. Разделив на At, получим уравнение
Мещерского:
та = F — /iu,
где /i = AM/At = —Am/At — расход топлива в струе. Второй член в
правой части называют реактивной силой.
Запишем уравнение Мещерского для движения по прямой в
отсутствие внешней силы: m(dv/dt) = — (dm/dt)u. Считая и по-
постоянной, найдем зависимость скорости корабля от его массы:
v/u = -ln(m/m0) (уравнение Циолковского).
1.5. Закон сохранения энергии
> Работа — скалярная величина, являющаяся мерой изменения
энергии. Работа внешних сил равна изменению энергии
A = E2-EV A2)
Определение работы (через интеграл от скалярного произведения):
А= j (Р -df) = [ FT\dr\= f
где FT — проекция силы на направление движения точки ее приложе-
приложения, а а — угол между силой и этим направлением. Работа и энергия
измеряются в джоулях (Дж = Н • м).
Пример 1. Работа постоянной силы F
равна скалярному произведению силы на полное перемещение и не зависит от
траектории точки приложения.
Пример 2. Работа центральной силы (силы со стороны центрального поля,
см. разд. 1.3) равна
А = / ( f • d?) = f 2 F(r) dr
Л Jri
(проекция dr на радиальное направление равна изменению расстояния г до
центра). Она зависит только от начального гх и конечного г2 расстояний до
силового центра и не зависит от траектории.
1.5. Закон сохранения энергии 147
> Мощность. Средняя мощность — отношение работы к интервалу
времени. Мгновенная механическая мощность равна
Мощность измеряется в ваттах (Вт = Дж/с).
> Кинетической энергией называется энергия, связанная с дви-
движением точки и зависящая от ее скорости. Скорость тела изменяется
под действием результирующей силы F, работа которой равна
/2 р2 л2 i pv2
FT\dr\ — m I arvdt = m -r-vdt = m vdv=.\mv\ — \mv\.
Ji Л dt JVl
, A3)
Видно, что в соответствии с общим принципом A2) кинетическую
энергию надо определить как Ек — mv2/2. Полученное тождество,
утверждающее, что изменение кинетической энергии равно работе
результирующей силы, называют теоремой о кинетической энергии.
Кинетическая энергия системы точек определяется как сумма
кинетических энергий всех точек системы. Изменение кинетической
энергии системы равно работе всех сил, действующих на ее точки.
Кинетическая энергия системы равна:
^k=:YL + ^oth. A4)
где т — масса системы, уц — скорость ее центра масс, J5OTH —
кинетическая энергия в-системе центра масс (теорема Кёнига).
> Консервативные силы. Потенциальное поле. Сила взаимо-
взаимодействия между точками называется консервативной, если работа
этой силы зависит только от начального и конечного положения то-
точек, но не зависит от траектории их перемещения. Внепйее стацио-
стационарное поле называется потенциальным, если работа поля при пере-
перемещении точки зависит только от ее начального и конечного положе-
положения, но не зависит от ее траектории. (Эквивалентное утверждение —
работа поля при перемещении точки по замкнутой траектории рав-
равна нулю.) Потенциальное поле—это поле консервативных сил взаи-
взаимодействия, создаваемое неподвижными внешними источниками. Из
примера 1 следует, что однородное поле потенциально (пример — по-
поле тяжести). Из примера 2 следует, что любое центральное поле по-
потенциально. Потенциальным будет также поле, являющееся суперпо-
суперпозицией нескольких центральных полей (создаваемое несколькими ис-
источниками). Значит, электростатическое поле и стационарное поле
тяготения являются потенциальными. Из примера 2 также следует,
что сила упругости, создаваемая легкой пружиной, является консер-
консервативной. Система точек, между которыми действуют только кон-
консервативные силы, называется консервативной системой.
148 Физические основы механики
> Потенциальная энергия. Потенциальная энергия характеризу-
характеризует взаимодействие между точками и зависит от их взаимного распо-
расположения. Потенциальная энергия точки во внешнем потенциальном
поле определяется следующим образом. Сначала определим разность
потенциальных энергий для двух положений точки как работу поля
по ее переносу из одного положения в другое:
ЕП(г1)-ЕП(г2) = А12 A5)
(эта работа не зависит от траектории). Значит, изменение потенци-
потенциальной энергии Е2 — Ег равно работе сил поля, взятой с обратным
знаком. Если перемещение частицы в поле осуществляется очень мед-
медленно с помощью внешней силы, то работа внешней силы будет равна
по величине и противоположна по знаку работе поля, т.е. А\2 = Е2—Ег
в соответствии с общим принципом A2). Равенство A5) определяет
потенциальную энергию с точностью до константы. Чтобы сделать
определение однозначным, надо задать значение потенциальной энер-
энергии в какой-то точке пространства (обычно задают точку, в которой
потенциальная энергия равна нулю).
Пример 3. Работа силы тяжести тд при перемещении точки массой га с
высоты /ix на высоту h2 равна mgh^ — mgh2. Значит, потенциальная энергия
точки в поле тяжести равна Еп = mgh, где высота отсчитывается от оговоренного
нулевого уровня. Потенциальная энергия системы точек в поле тяжести равна
где т — масса системы, 1гц — высота ее центра масс.
х2
Пример 4. Работа силы упругости равна \ (—kx)dx = •yArxj — —Ajo^, где
х 1» Х2 — начальная и конечная деформация пружины. Значит, потенциальная
энергия упругой пружины равна Еп = у кх2, где за нуль принята энергия
недеформированной пружины.
Пример 5. Работа сил трения, сопротивления отрицательна как на каждом
участке пути, так и вдоль замкнутой траектории. Значит, эти силы не являются
консервативными.
Потенциальную энергию консервативного взаимодействия двух
частиц можно определить как потенциальную энергию одной части-
частицы в поле другой частицы. Ответ не зависит от того, какую из частиц
выбрать в качестве источника поля.
> Связь силы с потенциальной энергией. Записав равен-
равенство A5) для двух близких точек, лежащих на некоторой оси /, полу-
получим ЕпA) — En(l + dl) = Ftdl. Значит, проекция силы на произвольное
направление выражается через производную от потенциальной энер-
энергии:
Fi = -^r A6)
1.5. Закон сохранения энергии 149
(частная производная означает, что Еп рассматривается как функция
одной переменной /). Вектор силы получается равным градиенту
потенциальной энергии:
Для центрального поля формула A6) принимает вид
> Механическая энергия системы определяется как сумма ее
кинетической энергии, потенциальной энергии взаимодействия меж-
между ее частицами и потенциальной энергии во внешнем поле:
A9)
Первые две суммы образуют собственную механическую энергию
системы.
> Изменение механической энергии. Изменение кинетической
энергии равно работе всех сил, приложенных к точкам системы
(уравнение A3)). Изменение потенциальной энергии равно работе
всех консервативных сил (внутренних и внешних, включая работу
потенциальных полей), взятой с обратным знаком. Значит, изменение
механической энергии равно работе всех неконсервативных сил, как
внешних, так и внутренних:
ДЯмех = беконе- B0)
> Закон сохранения механической энергии: механическая
энергия замкнутой консервативной системы остается постоянной.
Это утверждение является частным проявлением общего фунда-
фундаментального принципа сохранения энергии: полная энергия замкну-
замкнутой системы сохраняется. Полная энергия, кроме механической,
включает в себя также различные виды внутренней энергии: тепло-
тепловую, химическую, ядерную. Общий принцип сохранения энергии вы-
выходит далеко за пределы ньютоновской механики, в рамках которой
мы получили закон сохранения механической энергии. Этот прин-
принцип тесно связан с фундаментальным условием однородности време-
времени (равноправием всех моментов времени), он является основанием
всего здания современной физики.
Условие консервативности эквивалентно требованию независимо-
независимого сохранения двух слагаемых полной энергии: механической и вну-
внутренней. Если, например, внутри системы действуют силы трения,
150
Физические основы механики
работа которых отрицательна, то механическая энергия уменьшает-
уменьшается (уравнение B0)), переходя во внутреннюю (в этом случае говорят,
что в системе выделяется тепло). Механическая энергия может также
изменяться в том случае, если в системе присутствует какой-нибудь
механизм, способный производить работу за счет внутренней энер-
энергии (топлива): двигатель внутреннего сгорания, человек.
Пример 6. Упругий удар. При центральном ударе упругих шаров сохра-
сохраняется и импульс системы, и ее механическая энергия:
m\v\x
Вместо второго уравнения удобно использовать условие, что относительная ско-
скорость шаров не меняется по величине, но изменяет свой знак: vlx — v2x = и2х ~ulx.
Это уравнение можно вывести из первых двух, но оно становится очевидным при
переходе в инерциальную систему центра масс (относительная скорость при та-
таком переходе не меняется). В этой системе отсчета полный импульс системы ра-
равен нулю, и после удара скорости шаров просто меняются на противоположные
(оба закона сохранения при этом выполняются). Решая два линейных уравнения,
находим конечные скорости шаров:
(тх - m2)vlx + 2m2v2x
=
771 j -f" ^2
(m2 - m1)v2x + 2mlvlx
При упругом ударе о движущуюся стенку (т2 ^> т^) получим
U2x
u\x
Пример 7. Неупругий удар. После абсолютно неупругого удара шары
движутся поступательно с одинаковой скоростью, т.е. как одно составное тело
(вращения не возникнет, если в системе центра масс удар центральный). Скорости
сравниваются в результате действия неконсервативных сил, т.е. при неупругом
ударе обязательно выделяется тепло. Чтобы убедиться в этом, найдем с помощью
закона сохранения импульса конечную скорость шаров: mlv1 +m2ti2 = (ml +т2)й}
после чего вычислим уменьшение механической энергии:
m2v2
гп2)и2 _ т1т2 (^ — €Г2J
т1 +т2
Еще проще получить этот ответ в системе координат, связанной с центром масс,
где шары после удара покоятся.
> Потенциальные
кривые. Устойчивость. Если известна
потенциальная энергия одномерно-
одномерного движения в потенциальном по-
поле Еп(г) (рис. 5), то, опираясь на со-
соотношение A6) между силой и энер-
энергией, можно выяснить:
а) Направление силы (F > 0 при
Рис. 5.
б) Точки равновесия (F = 0 при
rmin и г = гтах).
1.6. Закон сохранения момента импульса 151
в) Устойчивость равновесия. В окрестности точки rmin сила на-
направлена в сторону этой точки, т.е. равновесие устойчиво. В точ-
точке rmax равновесие неустойчиво. Устойчивое равновесие соответству-
соответствует минимуму потенциальной энергии.
г) По значению механической энергии Е можно установить ха-
характер движения. Движение может происходить только в области,
где Е > Еп (кинетическая энергия неотрицательна). При Е < Еп(оо)
(для рис. 5 Еп(оо) = 0) движение финитное, т.е. происходит в огра-
ограниченной области г. На рис. 5 движение происходит между точка-
точками поворота г2, г3. При Е > 0 движение либо инфинитно, т.е. точ-
точка после отражения от точки поворота г5 уходит на бесконечность
с кинетической энергией Е, либо заперто потенциальным барьером
и движется между точками поворота гх, г4. В классической меха-
механике потенциальный барьер непреодолим; в квантовой механике су-
существует вероятность проникновения сквозь потенциальный барьер
(туннельный эффект).
1.6. Закон сохранения момента импульса
> Момент силы. Равнодействующая. Момент силы F относи-
относительно точки О определяется равенством
ti = rxf, B1)
где г — радиус-вектор точки приложения силы. Момент силы не ме-
меняется при перемещении силы вдоль линии ее действия. Модуль мо-
момента равен М = Frsina = Fd, где а —
угол между силой и радиусом-вектором,
d — расстояние между точкой О и ли-
линией действия силы, которое называют
плечом силы (рис. 6). Важнейшее свойст-
свойство момента силы заключается в том, что
для любой системы точек сумма момен-
моментов внутренних сил равна нулю. Спра-
Справедливость этого утверждения основана
на том, что по третьему закону Ньютона Рис. 6.
(см. разд. 1.3) силы взаимодействия между точками не только рав-
равны по величине и противоположны по направлению, но и направлены
вдоль соединяющей эти точки прямой. Отметим еще одно свойства
момента сил: если сумма сил равна нулю, то они создают одинаковый
суммарный момент относительно любой точки пространства.
Равнодействующей системы сил называют силу, равную их век-
векторной сумме и приложенную таким образом, что ее момент относи-
относительно любой точки пространства равен суммарному моменту этой
системы сил.
152 Физические основы механики
Пример 1. Вычислим суммарный момент сил тяжести, действующих на
точки системы:
где m — масса системы, гц — радиус-вектор центра масс. Видно, что равнодей-
равнодействующая сил тяжести проходит через центр масс, т.е. центр масс является
также центром тяжести.
Моментом силы относительно оси z называют проекцию Mz на
эту ось момента сил относительно любой точки на этой оси. Если
разложить как г, так и г в B1) на две составляющих, параллельную
оси и перпендикулярную к ней, г = fji + r±,F = Fu + ?±, то соста-
составляющие, параллельные оси, не дадут вклада в проекцию момента на
ось. Следовательно, М2 = (г^ х F1J. В плоскости, перпендикуляр-
перпендикулярной оси, получим такую же картинку, как на рис. 6, только вместо
г и F надо обозначить г± и г±. Соответственно модуль момента
относительно оси также равен произведению силы на плечо, а выбор
положительного направления вдоль оси можно заменить выбором бо-
более наглядного положительного направления вращения вокруг оси.
> Моментом импульса материальной точки относительно точ-
точки О называют величину
t = f х р, B2)
где г — радиус-вектор материальной точки, проведённый из точки О,
р — ее импульс. При движении с постоянной скоростью момент им-
импульса не меняется. Модуль момента импульса равен произведению
импульса на плечо. Моментом импульса относительно оси z называет-
называется проекция L2 на эту ось момента импульса L относительно любой
точки на этой оси. Момент импульса относительно оси определяется
проекцией движения точки на плоскость, перпендикулярную к оси:
L2 = (?± х РхJ. Все эти свойства абсолютно аналогичны соответ-
соответствующим свойствам момента силы.
Производная по времени от момента импульса материальной
точки относительно точки О
dL dr _ _ dp _ . _. -4 -t . ч
—-- =—- xp+rx -j- = vxp+rx F = M B3)
at at at
равна моменту результирующей силы относительно точки О (член
v х р = 0 в силу параллельности векторов v и р.)
Пример 2. Движение в центральном поле. Так как на частицу в цен-
центральном поле действует сила, направленная в сторону центра поля, то момент
этой силы относительно центра тождественно равен нулю. Значит, вектор L мо-
момента импульса относительно центра сохраняется. Из определения B2) следует,
что движение происходит в одной плоскости, перпендикулярной L , и что сохра-
сохраняется величина L = mvr sin а. Эта величина пропорциональна скорости «заме-
«заметания» площади радиусом-вектором г*: ds/dt = ~-r(i>aft) sina/dt = L/2m, так что
1.7. Задача двух тел и движение в центральном поле 153
утверждение о сохранении момента импульса при движении в центральном поле
оказывается эквивалентным знаменитому второму закону Кеплера.
Моментом импульса системы относительно точки О называется
сумма моментов импульса материальных точек, составляющих эту
систему. Момент импульса системы равен
t =rnxp+tOTH. B4)
Одно из следствий этого равенства: если импульс системы равен ну-
нулю, то L не зависит от выбора точки О. Суммируя уравнение B3) по
всем точкам системы и учитывая, что суммарный момент внутрен-
внутренних сил равен нулю, получим
Цг=Й:> B5)
т.е. производная по времени от момента импульса системы равна
суммарному моменту внешних сил.
> Закон сохранения момента импульса. Из уравнения B5) сле-
следует, что момент импульса замкнутой системы сохраняется. Закон
сохранения момента импульса является фундаментальным законом,
отражающим изотропность пространства, т.е. равноправие всех его
направлений. Как и в случае законов сохранения импульса и энергии,
действие закона сохранения момента импульса выходит за пределы
ньютоновской механики, в рамках которой он был выведен.
Момент импульса незамкнутой системы сохраняется в следую-
следующих случаях:
1. Если суммарный момент внешних сил Ме равен нулю. (Пример:
движение частицы в центральном поле.)
2. Если равен нулю момент импульса внешних сил относительно
некоторой оси, то сохраняется момент импульса относительно этой
оси.
Пример 3. Если грузик на конце невесомой нити движется по горизонталь-
горизонтальной окружности, то момент импульса относительно любой точки на оси вращения
(кроме центра окружности) не сохраняется, а момент импульса относительно оси
вращения сохраняется, так как моменты сил тяжести и натяжения нити относи-
относительно этой оси равны нулю.
3. Если внешние силы ограничены, то изменением момента им-
импульса Д L = MeAt за время удара At можно пренебречь.
1.7. Задача двух тел и движение
в центральном поле
> Приведенная масса. Рассмотрим замкнутую систему двух вза-
взаимодействующих между собой частиц. Решить задачу об их движе-
движении (задачу двух тел) — значит определить положение точек во все
154
Физические основы механики
моменты времени исходя из заданных начальных условий. Положение
точек выражается через положение центра масс гц(г) (см. (8)) и их
относительное расположение ги = г1 — г2:
ШпГ
2'12
Го = Г„ -
ГПл
77l2
Движение центра масс является равномерным, а его начальные поло-
положение и скорость определяются из начальных условий (см. уравнения
(8), (9)). Получаем, что решение задачи двух тел сводится к опреде-
определению г12.
Из условия однородности и изотропности пространства и одно-
однородности времени следует, что частицы должны взаимодействовать
центральными силами, т.е. F12 = — F21 = F, где F параллельна г12)
а ее модуль F зависит только от |г*12|. Запишем уравнения движения
каждой точки:
rt dr± rdf dv2
Разделим первое уравнение на т1) второе на ш2, а затем вычтем
второе уравнение из первого. В результате получим:
dfn „.„ * _.. ^2
dt
т
ТПп
dt
или
где приведенная масса /л определяется равенством
ml
L
m2
i
/л ml m2
Видно, что поведение вектора г12 определяется решением задачи о
движении частицы массой ji в центральном поле.
> Эффективная потенциальная энергия. Применение законов
сохранения энергии и момента импульса позволяет установить,
как зависит от времени расстояние
до центра г, точнее, свести эту зада-
задачу к одномерному движению. Для это-
этого надо разложить скорость частицы
на две компоненты (рис. 7): радиаль-
радиальную vr = dr/dt и перпендикулярную к
ней азимутальную v^. Момент импуль-
импульса выражается через азимутальную ско-
скорость: L = mrVp. Значит, механическую энергию точки можно пред-
представить в виде:
Рис. 7.
1.8. Поле тяготения
155
Видно, что зависимость r(t) такая же, как при одномерном движе-
движении с эффективной потенци-
альнои энергией,
мой равенством
определяе-
Рис. 8.
Вид эффективной потенци-
потенциальной кривой определяется
значением ?, которое мож-
можно вычислить из начальных
условий.
На рис. 8 качественно
изображена зависимость эф-
эффективной потенциальной
энергии Е^ от расстоя-
расстояния г для разных значений L
(LQ = О, LX < L2 < L3) в случае Еп = —Ь/г. Видно, что при любом L
условие финитности движения остается одним и тем же: Е < 0.
1.8. Попе тяготения
> Закон всемирного тяготения. Две точечные массы т1, т2,
находящиеся на расстоянии г друг от друга, притягиваются с силой
тяготения (гравитационной силой), равной
F = T-±T2-, B8)
где 7 ^ 6,67 • 101 Н • м2/кг2 — гравитационная постоянная. Сила
тяготения — центральная сила, т.е. она действует вдоль линии,
соединяющей частицы.
Силу, действующую на материальную точку массой m в централь-
центральном поле тяготения (гравитационном поле), создаваемым неподвиж-
неподвижной точечной массой М, можно записать в виде (см. разд. 1.3):
тМ
— или
F(r) = -7
тМ
B9)
Тем самым роль «заряда» для поля тяготения играет инертная мас-
масса т. Иногда это свойство формулируют как равенство гравитаци-
гравитационной и инертной масс. Потенциальную энергию точки в централь-
центральном поле тяготения можно найти, используя соотношение между си-
силой и потенциальной энергией (формула A8)): —утМ/г2 = —dEn/dr,
т.е, Еп = —ymM/r + const. Константу обычно полагают равной нулю,
т,е. принимают за нуль потенциальную энергию на бесконечности:
Ел = -
C0)
156
Физические основы механики
> Принцип суперпозиции. Если поле тяготения создается не-
несколькими точечными массами М1) ..., MN) то сила, действующая
на материальную точку массой т, и ее потенциальная энергия вычи-
вычисляются по формулам:
где r — радиус-вектор точки массой m, fj —радиус-вектор точки
массой Mj. Если источник поля представляет собой непрерывно рас-
распределенную массу, то суммирование в C1) надо заменить интегри-
интегрированием.
> Напряженность и потенциал поля тяготения. Из уравне-
уравнений C1) видно, что как сила, действующая на материальную точку
массой т в поле тяготения, так и ее потенциальная энергия пропор-
пропорциональны т. Значит, удельные значения массы и энергии (отноше-
(отношения F /т и Еп/т) не зависят от величины т, т.е. представляют со-
собой характеристики поля. Их называют, соответственно, напряжен-
напряженностью и потенциалом поля тяготения:
Напряженность поля имеет простой физический смысл: она предста-
представляет собой ускорение свободного падения любой точечной массы,
помещенной в данную точку поля. Напряженность и потенциал поля
тяготения, создаваемого точечной массой М, имеют вид:
Mr M /ОПЧ
?=-772-7' V = -7—• C2)
Напряженность и потенциал поля, создаваемого несколькими масса-
массами, вычисляются с помощью принципа суперпозиции. Запись урав-
уравнения аналогична C1), для разнообразия запишем ответ для случая
распределенной массы:
Рис. 9.
Пример 1. Показать, что напряженность поля
тяготения внутри тонкого сферического слоя равна
нулю.
Решение. Для доказательства рассмотрим вклад
в напряженность поля в точке А небольших участков
В и С сферы, отсекаемых от нее тонким конусом с
вершиной в точке А (рис. 9). Отношение площадей
этих участков, а значит, и отношение их масс, равно
отношению квадратов расстояний от этих участков
до точки А. Следовательно, напряженности, создава-
емые этими участками в точке А, равны по величине.
1.8. Поле тяготения 157
Напряженность поля, создаваемого тонкой сферой массой М вне ее, оказы-
оказывается равной напряженности, создаваемой точечной массой М, помещенной в
центр сферы. Доказательство этого результата требует громоздкого интегриро-
интегрирования (первым его проделал Ньютон). В гл. 3 это утверждение будет доказано
с помощью теоремы Гаусса. Такой же ответ годится для любой сферически рас-
распределенной массы, в частности, для любой сферической планеты.
Пример 2. Пусть масса М распределена по отрезку длиной /. Вычислить
напряженность и потенциал на продолжении отрезка, на расстоянии х от его
центра.
Решение. Масса dm, заключенная на отрезке длиной dy, равна М dy/l.
Интегрируя, получим
x+l/2 x+l/2
f Mdy __ M f
Mdy _ M x + l/2
x-l/2 x-l/2
Видно, что симметричное, но несферическое тело нельзя заменить точечной
массой, помещенной в ее центр. Этот пример является также иллюстрацией
того, что напряженность и потенциал связаны соотношением дх = —дц?/дх,
аналогичным соотношению A6).
> Движение в центральном поле тяготения. Законы Кеп-
Кеплера. Движение в центральном поле тяготения подчиняется общим
законам движения в центральном поле. Однако оно обладает некото-
некоторыми особенностями, отраженными в первом и третьем из законов
Кеплера, сформулированных им для планет Солнечной системы.
Первый закон Кеплера утверждает, что финитное движение
(Е < 0) материальной точки в центральном поле тяготения проис-
происходит по замкнутой траектории —эллипсу, в одном из фокусов кото-
которого находится центр силы притяжения (Солнце).
Второй закон Кеплера фиксирует постоянство секторной скоро-
скорости, т.е. скорости «заметания» площади радиусом-вектором движу-
движущейся точки. Он относится к любому центральному полю и является
прямым следствием закона сохранения момента импульса (см. при-
пример 2 из разд. 1.6).
Третий закон Кеплера утверждает, что квадраты периодов дви-
движения относятся как кубы больших полуосей эллиптических орбит:
ТЦТ^ = аЦа\.
Дополним первый закон Кеплера утверждением, что инфинитное
движение в центральном поле тяготения происходит либо по параболе
(Е = 0), либо по гиперболе (Е > 0). В качестве дополнения к третьему
закону Кеплера приведем связь между удельной энергией движения
и большой полуосью: \Е\/т — уМ/Bа). Видно, что период движения
однозначно определяется удельной энергией движущегося тела.
> Космические скорости. Первой космической скоростью на-
называют скорость движения по круговой орбите вблизи поверхно-
поверхности планеты. Она определяется из уравнения движения спутника
mg = mvllR и равна Vj = л/gR = \J^MjR. (Для Земли г;х «7,9 км/с.)
158 Физические основы механики
Вторая космическая скорость — минимальная скорость, которую
надо сообщить телу на поверхности планеты, чтобы оно преодолело
силу тяготения и ушло на бесконечность. Как видно из разд. 1.7, усло-
условием инфинитности движения является неравенство Е^О, т.е. вторая
космическая скорость находится из уравнения mv^/2 — ymM/R = 0
и равна vn = \/2уМ/Я = \J2gR. (Для Земли vu «11,2 км/с.)
1.9. Неинерциальные системы отсчета
> Определение сил инерции. Во многих случаях удобно решать
задачу динамики непосредственно в неинерциальной системе отсчета
(НСО), а не пересчитывать ответ, полученный сначала в инерциаль-
ной системе отсчета. Для этого вводят силы инерции, определенные
следующим образом. Во втором законе Ньютона выделяют из ускоре-
ускорения точки а в виде отдельного слагаемого ее ускорение относительно
НСО аотн, а все остальное переносят в другую часть равенства и на-
называют силой инерции:
$. = та =* ? Р. = т{аОТИ + а*) =>
Приходим к следующему определению сил инерции:
где а* определяется кинематическим соотношением
C4)
C5)
и зависит от параметров НСО и положения и скорости частицы в
НСО. Разберем конкретные случаи.
> Поступательно движущиеся НСО. В этом случае а* равняет-
равняется ускорению системы отсчета (см. формулу A)), т.е. для силы инер-
инерции получим выражение
^ин = -гпак.
Видно, что сила инерции полностью эквивалентна силе тяжести.
При решении задач их удобно объединять вместе, т.е. введение
силы инерции оказывается эквивалентным замене напряженности
поля тяготения (т.е. ускорения свободного падения, см. разд. 1.8):
9 => 9* =9 + а* =д-ак.
Пример 1. Сосуд с жидкостью движется с постоянным горизонтальным
ускорением 8. Найти угол C между поверхностью жидкости и горизонталью.
1.9. Неинерциальные системы отсчета 159
Решение. Перейдем в систему отсчета, связанную с сосудом, где неподвиж-
неподвижная поверхность жидкости должна быть «горизонтальна», т.е. перпендикулярна
вектору д* = д + а* = § - а. Отсюда следует, что tg/З = а)д.
Принцип эквивалентности сил инерции и сил тяготения был
положен Эйнштейном в основу общей теории относительности,
которая является релятивистской теорией гравитации и объясняет
возникновение гравитационных сил искривлением пространственно-
временного континуума в присутствии внешних масс.
> Равномерно вращающаяся система отсчета. В этом слу-
случае кинематическое соотношение для ускорения C5) имеет вид:
3 = Зотн+а5х[п!хг)+2сЗх'Уотн (см. разд. 1.2). Второй член связан с пово-
поворотом вектора переносной скорости Q х г вместе с системой отсчета,
направлен в сторону оси вращения и равен u2R (R — расстояние до
оси), т.е. представляет собой центростремительное ускорение данной
точки системы отсчета. Третий член (ускорение Кориолиса) связан,
во-первых, с поворотом относительной скорости частицы вместе с
системой отсчета и, во-вторых, с изменением переносной скорости
за счет перемещения частицы из одной точки вращающейся НСО в
другую. Соответственно сила инерции C4) представляет собой сум-
сумму двух членов, первый из которых называют центробежной силой,
а второй — силой Кориолиса:
Ян = ^цб + ^кор = ™2R + 2mvQTH х сЗ. C6)
Центробежная сила инерции направлена от оси вращения (R напра-
направлен от оси вращения перпендикулярно к ней). Так как она не зави-
зависит от скорости частицы, то ее действие неотличимо от (неоднород-
(неоднородного) поля тяготения. Например, на поверхности Земли измеряемая
сила тяжести представляет собой сумму силы тяготения и центро-
центробежной силы инерции. Сила Кориолиса направлена перпендикулярно
скорости. В северном полушарии для движения вдоль поверхности
горизонтальная составляющая силы Кориолиса направлена вправо,
что проявляется в образовании циклонов, размывании правого бере-
берега рек и др.
Пример 2. Требуется найти отклоняющее действие силы Кориолиса на тело,
свободно падающее с высоты h на экваторе Земли.
Решение. Так как отклонение маленькое, то в первом приближении можно
подставлять в силу Кориолиса C6) скорость «невозмущенного» падения v = §t. Так
как вектор и> перпендикулярен гТ, то сила Кориолиса направлена в сторону восто-
востока, равна 2mvw и сообщает горизонтальное ускорение авост = 2wgt. Интегрируя,
находим горизонтальную скорость vB0CT = gutt2 и горизонтальное перемещение
sboct = "з^3• Подставив сюда время падения t = y/2h/gt найдем конечное от-
отклонение. Например, для h = 300 м отклонение составляет ю 10 см.
160 Физические основы механики
1.10. Динамика твердого тела
> Вращение вокруг неподвижной оси. Момент импульса твер-
твердого тела относительно неподвижной оси вращения z (см. разд. 1.6)
равен
\lz\ =
где Rj —расстояние от точки rrij до оси вращения, и мы использова-
использовали соотношение v- = ujR-. Направление проекции совпадает с напра-
влением с2, т.е. определяется по правилу буравчика. Величина
= I
R2dm
называется моментом инерции твердого тела относительно оси z.
Продифференцировав C7) по времени и учтя, что dLz/dt — Mz)
где Mz — момент внешних сил относительно оси вращения (уравне-
(уравнение B5)), получим
Мя = 1яе, C9)
где е = du/dt — угловое ускорение. Это уравнение называют основ-
основным уравнением динамики вращательного движения твердого тела
вокруг неподвижной оси. Вычислим еще кинетическую энергию вра-
вращающегося твердого тела:
JR2J = H D0)
и работу внешней силы при повороте тела:
А= [dr. P = .[{wdixr). $ = f{Udt).{rx #)= ((й-dip),
где dip = й dt.
Пример 1. К концу нити, намотанной на блок с моментом инерции I и
радиусом Я, привязали тело массой т и отпустили. Найти угловое ускорение
тела.
Решение. Запишем второй закон Ньютона для тела: тд — Т = та и
уравнение C9) для блока: TR = 1е. Учтем также кинематическое соотношение
а = eR. Решая эти уравнения, получим а = д/(\ + I/mR2).
> Свойства момента инерции. Момент инерции C8) — скаляр-
скалярная аддитивная величина, характеризующая распределение массы те-
тела по отношению к оси. Из уравнений C9), D0) видно, что момент
инерции является мерой инертности твердого тела по отношению к
вращательному движению, т.е. играет ту же роль, что масса для по-
поступательного движения.
Пример 2. Вычислить момент инерции однородного диска массой т и
радиусом Я относительно оси симметрии.
1.10. Динамика твердого тела 161
Решение. Разбив диск на тонкие круговые полоски и интегрируя, получим
-!""'-[
R ' ч mR2
Такой же ответ верен и для сплошного однородного цилиндра.
Теорема Штейнера связывает момент инерции / относительно
произвольной оси с моментом инерции /0 относительно параллельной
ей оси, проходящей через центр масс твердого тела:
/=/0-fma2, D1)
где т — масса тела, а—расстояние между осями. Например, момент
инерции диска относительно оси, перпендикулярной плоскости дис-
диска и проходящей через его край, равен -|-тЯ2. Минимальный момент
инерции среди всех параллельных осей получается для оси, проходя-
проходящей через центр масс.
Теорема о взаимно перпендикулярных осях: момент инерции плос-
плоского тела относительно произвольной оси z) перпендикулярной его
плоскости, равен сумме моментов инерции относительно двух взаим-
взаимно перпендикулярных осей х и у, лежащих в плоскости тела и пере-
пересекающихся с осью z:
Например, момент инерции тонкого диска относительно оси симме-
симметрии, лежащей в его плоскости, равен Ix = Iy = \lz = ~mR2.
Приведем моменты инерции некоторых тел различной формы.
1) Тонкий обруч (относительно оси симметрии): / = mR2. Такой
же момент инерции имеет тонкостенный цилиндр (без торцов).
2) Тонкий стержень длиной / (относительно перпендикулярной к
стержню оси, проходящей через его середину): / = -у^-m/2. Такой
же момент инерции имеет плоский прямоугольник относительно
оси, проходящей через середины противоположных сторон длиной /.
Относительно края стержня момент инерции равен / = ^ml2.
3) Плоский прямоугольник относительно оси, перпендикулярной
его плоскости и проходящей через его центр: / = -~т(а2 + б2).
Такой же момент инерции имеет прямоугольный параллелепипед
относительно оси, проходящей через середины противоположных
граней.
4) Тонкая сфера относительно оси симметрии: / = -jinR2.
5) Однородный шар относительно оси симметрии: / = ~mR2.
6) Цилиндрический слой с внутренним радиусом R1 и внеш-
внешним R2: I = \m(R\ + R\).
6 А. Д. Полянин, В. Д. Полянин и др.
162
Физические основы механики
> Плоское движение твердого тела. Плоское движение есть су-
суперпозиция поступательного движения центра масс и вращательно-
вращательного движения в системе центра масс (см. разд. 1.2). Движение цен-
центра масс описывается вторым законом Ньютона и определяется ре-
результирующей внешней силой (уравнение A1)). Вращательное дви-
движение в системе центра масс подчиняется уравнению C9), в кото-
котором надо учитывать только реальные внешние силы, так как момент
сил инерции относительно центра масс равен нулю (аналогично мо-
моменту сил тяжести, пример 1 из разд. 1.6). Кинетическая энергия
плоского движения равна Ек = -jmv^ + \lul (см. уравнение A4)).
Момент импульса относительно неподвижной оси, перпендикулярной
плоскости движения, вычисляется по формуле (см. уравнение B4)):
Lz = ±mvnd ± /ос<;, где d—плечо скорости центра масс относитель-
относительно оси, а знаки определяются выбором положительного направления
вращения.
Пример 3. Требуется найти ускорение круглого тела, которое скатыва-
скатывается без проскальзывания по наклонной плоскости (рис. 10).
Решение. Уравнения движения име-
имеют вид: тд sin /3 — FTp = та, FTpH = Ie.
Условие отсутствия проскальзывания
(v = uR) приводит к уравнению a = eR (см.
пример 1 из разд. 1.2). Решая уравнения,
находим ускорение: а = # sin C/(l+I/mR2).
Так как сила трения покоя работы не со-
совершает, то механическая энергия сохра-
сохраняется.
Пример 4. При упругом ударе шари-
шарика массой т о край неподвижного стерж-
стержня длиной / и массой М, расположенного
перпендикулярно его скорости, конечные
скорости шарика и, центра стержня V и
угловую скорость его вращения ш определяют из трех уравнений:
1) закона сохранения импульса: mv = mu + MV,
2) закона сохранения энергии: mv2/2 = mu2/2 + MV2/2 + (М/2/12)о;2/2,
3) закона сохранения момента импульса (например, относительно точки
удара): 0 = MV(l/2) - (M12/12)uj.
> Движение с неподвижной точкой. Угловая скорость враще-
вращения, направленная вдоль оси вращения, ме-
меняет свое направление как в пространстве,
так и по отношению к самому твердому те-
телу. Уравнение движения
-df = M'
которое называют основным уравнением
движения твердого тела с неподвижной
точкой, позволяет узнать, как изменяется
момент импульса L . Так как вектор L в об-
общем случае не параллелен вектору w, то для
тд
Рис. 10.
N
т,
-F
Рис. 11.
1.10. Динамика твердого тела
163
замыкания уравнении движения надо научиться связывать эти вели-
величины друг с другом.
Пример 5. При вращении наклонной гантельки вокруг вертикальной оси
(рис. 11) момент импульса L — гх X pj + г2 X р2 направлен перпендикулярно
гантельке, он направлен под углом к оси вращения и сам вращается с угловой
скоростью C.
Проблему связи между L и й решает теорема о главных осях
инерции, утверждающая, что для любой точки тела существуют три
взаимно перпендикулярные оси, при вращении относительно которых
вектор L параллелен оси вращения: Ь,- = 1{й{ (г = 1,2,3). Момен-
Моменты инерции относительно этих осей называют главными моментами
инерции. Если вращение происходит вокруг произвольной оси враще-
вращения, то, разложив угловую скорость по главным осям й = й± + &2 +^з»
мы сможем вычислить момент импульса: L = 11й1-\-12й2Л-13<^3- (Ана-
(Аналогично, разложив вектор L , мы найдем вектор й.) Если главные оси
проведены через центр масс (центр инерции) тела, то их называют
свободными осями. При вращении вокруг любой из свободных осей
сохраняются как импульс, так и момент импульса тела, т.е. для под-
поддержания вращения к телу не надо прикладывать ни внешнюю силу,
ни внешний момент сил. (В примере 5 результирующая сила равна
нулю, но в точках крепления оси возникает пара сил, момент кото-
которых обеспечивает изменение L со временем.) При свободном вра-
вращении устойчивым оказывается только вращение относительно двух
свободных осей — с минимальным и максимальным главными момен-
моментами инерции.
> Гироскопы. Гироскопом называют твердое тело, быстро враща-
вращающееся относительно своей оси симметрии. Задачу о движении оси
гироскопа можно решать в гироскопическом приближении: L = /и;,
оба вектора направлены вдоль
оси симметрии. Уравновешенный
гироскоп (закрепленный в центре
масс) обладает свойством безы-
нерционности: его ось переста-
перестает двигаться, как только исчеза-
исчезает внешнее воздействие (м обра-
обращается в нуль). Это позволяет ис-
использовать гироскоп для сохране-
сохранения ориентации в пространстве.
На тяжелый гироскоп (рис. 12),
у которого центр масс смещен на
расстояние d от точки закрепле-
закрепления, действует момент силы тяжести, направленный перпендикуляр-
перпендикулярно L . Так как dL jdt JL L , то L и ось гироскопа совершают ре-
регулярное вращение вокруг вертикальной оси (прецессия гироскопа).
тд
164 Физические основы механики
Конец вектора L вращается по горизонтальной окружности радиу-
радиусом L sin а с угловой скоростью
__ \dL/dt\ __ mgdsina __ mgd
L sin a Iujsina Iuj
Угловая скорость прецессии не зависит от угла наклона оси а.
1.11. Специальная теория относительности
Специальная теория относительности Эйнштейна (СТО) рас-
расширяет границы классической ньютоновской физики, действующей в
области нерелятивистских скоростей^ малых по сравнению со скоро-
скоростью света с, на любые, в том числе релятивистские, т.е. сравнимые
с с, скорости. Все результаты релятивистской теории при v/c-}0 пе-
переходят в результаты классической нерелятивистской физики (прин-
(принцип соответствия).
> Постулаты СТО. Специальная теория относительности опира-
опирается на два постулата:
Первый постулат (принцип относительности Эйнштейна): все
физические законы — как механические, так и электромагнит-
электромагнитные — имеют одинаковый вид во всех инерциальных системах от-
отсчета (ИСО). Иными словами, никакими опытами нельзя выделить
какую-то одну систему отсчета и назвать именно ее покоящейся.
Этот постулат является расширением принципа относительности Га-
Галилея (см. разд. 1.3) на электромагнитные»процессы.
Второй постулат Эйнштейна: скорость света в вакууме одина-
одинакова для всех ИСО и равна с « 3-Ю8 м/с. Этот постулат содержит
сразу два утверждения:
а) скорость света не зависит от скорости источника,
б) скорость света не зависит от того, в какой ИСО находится
наблюдатель с приборами, т.е. не зависит от скорости приемника,
Постоянство скорости света и независимость ее от движения источника сле-
следуют из уравнений электромагнитного поля Максвелла. Казалось очевидным, что
такое утверждение может быть верным только в одной системе отсчета. С точ-
точки зрения классических представлений о пространстве — времени, любой другой
наблюдатель, двигаясь со скоростью г», должен для встречного луча получить ско-
скорость с + v} а для испущенного вперед луча — скорость с — v. Такой результат
означал бы, что уравнения Максвелла выполняются только в одной ИСО, запол-
заполненной неподвижным «эфиром», относительно которого и распространяются све-
световые волны. Однако попытка обнаружить изменение скорости света, связанное
с движением Земли относительно эфира, дала отрицательный результат (опыт
Майкельсона— Морли). Эйнштейн предположил, что уравнения Максвелла, как
и все законы физики, имеют один и тот же вид во всех ИСО, т.е. что скорость
света в любой ИСО равна с (второй постулат). Это предположение привело к
пересмотру основных представлений о пространстве— времени.
1.11. Специальная теория относительности 165
^ Преобразования Лоренца. Преобразования Лоренца связыва-
связывают между собой координаты и время события, измеренные в двух
ИСО, одна из которых (А"') движется относительно другой (К) с
постоянной скоростью V. При таком же выборе осей координат и
отсчета времени, как в преобразованиях Галилея (формула G)), пре-
преобразования Лоренца имеют вид:
, —У* „,_„ z,-z f,_ t-(V/c)x
х ~ /т^щг' у~у' z~z' 1-^т=щ?- D2)
Часто удобно пользоваться преобразованиями для разности ко-
координат и времен двух событий:
), Ау' = Ау, Az' = Az, At' = j[At-(V/c2)Ax],
D3)
где для краткости введено обозначение
7 = vi W' 7>L D4)
Преобразования Лоренца переходят в преобразования Галилея при
V <С с. Они выводятся из второго постулата СТО и из требования
линейности преобразований, выражающего условие однородности
пространства. Обратные преобразования из К1 в К можно получить
из D2), D3) заменой V на —V:
]
D5)
> Сокращение длины. Длина движущегося отрезка определяется
как расстояние между точками, где концы отрезка находились одно-
одновременно (т.е. At = 0). Рассмотрим твердое тело, которое движется
поступательно со скоростью v) и свяжем с ним систему отсчета К1.
Из уравнения D3) (в котором надо положить V = v) At = 0) получим,
что продольные размеры движущегося тела сокращаются:
J = /0/7 = Wl-«2/c2. D6)
где /0 — собственный продольный размер, т.е. измеренный в системе
отсчета К1, в которой тело неподвижно. Поперечные размеры дви-
движущегося тела не изменяются.
Пример 1. Если квадрат движется со скоростью v = 0,8с вдоль одной из
своих сторон, то он превращается в прямоугольник с углом между диагоналями,
равным arcctg y/l - v2/c2 = arcctgO,6 « 59°.
> Относительность хода времени. Из преобразований Лоренца
видно, что время протекает по-разному в разных ИСО. В частно-
частности, события, происходящие в системе К одновременно (At = 0), но
166 Физические основы механики
в разных точках пространства, в К' могут быть не одновременны-
одновременными: At' = —yVAx/c2 может быть как положительным, так и отрица-
отрицательным (относительность одновременности). Часы, движущиеся
вместе с системой отсчета (т.е. неподвижные относительно К1) или
Ах' = 0), показывают собственное время этой ИСО. С точки зре-
зрения наблюдателя в системе К, эти часы отстают от его собственных
(замедление хода времени). Рассматривая два отсчета движущихся
часов как два события, из D5) получим:
D7)
где At = At' — собственное время движущихся часов (точнее, свя-
связанной с ними ИСО). Равноправие всех ИСО проявляется в том, что
с точки зрения наблюдателя К' часы, неподвижные относительно К)
будут отставать от его собственных. (Заметим, что для контроля за
движущимися часами неподвижный наблюдатель в разные моменты
времени использует разные часы.) Парадокс близнецов заключается
в том, что СТО предсказывает различие в возрасте двух близнецов,
один из которых оставался на Земле, а другой путешествовал в глу-
глубоком космосе (космонавт будет моложе); казалось бы, это нарушает
равноправие их систем отсчета. На самом деле, только земной близ-
близнец все время находился в одной ИСО, космонавт же поменял ИСО
для возвращения на Землю (его же собственная система отсчета не-
инерциальна).
Пример 2. Среднее собственное время жизни нестабильного мюона
т = 2,2 • 10~6 с, т.е. ст ~ 660 м. Благодаря эффекту замедления времени, с точки
зрения земного наблюдателя космический мюон, летящий со скоростью г», близ-
близкой к скорости света G >• 1), живет в среднем 7f, пролетает от места рождения в
верхних слоях атмосферы расстояние порядка 07т, что позволяет регистрировать
его на поверхности Земли.
> Сложение скоростей в СТО. Если частица движется со ско-
скоростью v' относительно ИСО К') то ее скорость относительно К
можно найти, выразив dx, eft/, dz) dt из D5) и подставив в vx = dx/dt)
vy = dy/dt, vz = dz/dt:
v - JWEZ2Z. D8)
z~ l + v'V/c* ' K }
При vx, V <C с происходит переход к нерелятивистскому закону
сложения скоростей (формула A)). Важное свойство формулы D8)
состоит в том, что если V и v' меньше с, то и v будет меньше с.
Например, если мы разгоним частицу до V = 0,9с, а затем, перейдя в
ее систему отсчета, снова разгоним ее до v' = 0,9с, то результирующая
скорость окажется не 1,8с, а A,8с)/1,81 < с. Видно, что превзойти
скорость света не удается. Скорость света является максимально
возможной скоростью передачи взаимодействий в природе.
1.11. Специальная теория относительности 167
^ Интервал. Причинность. Преобразования Лоренца не сохра-
сохраняют ни величину интервала времени, ни длину пространственного
отрезка. Однако можно показать, что при преобразованиях Лоренца
сохраняется величина
s\2 = (cAtJ - (Д*J - (AyJ - (Д*J = (cAtJ - (ДгJ, D9)
где s12 называется интервалом между событиями 1 и 2 (At = t2—t1)
Дг* = f2 — f^). Если s\2 > 0, то интервал между событиями называют
времениподобным, так как в этом случае существует ИСО, в которой
Дг = 0, т.е. события происходят в одном месте, но в разное время.
Такие события могут быть причинно связанными. Если, наоборот,
s\2 < О, то интервал между событиями называют пространственно-
подобным, так как в этом случае существует ИСО, в которой At = О,
т.е. события происходят одновременно в разных точках простран-
пространства. Между такими событиями не может существовать причинной
связи. Условие c\At\ < \Ar\ означает, что луч света, испущенный в мо-
момент более раннего события (например, tx) из точки г1) не успевает
достигнуть точки г2 к моменту времени t2. События, отделенные от
события 1 времениподобным интервалом, представляют по отноше-
отношению к нему или абсолютное прошлое (t2 —t1< 0), или абсолютное
будущее (t2 — t1 > 0); порядок следования этих событий одинаковый во
всех ИСО. Порядок следования событий, отделенных пространствен-
ноподобным интервалом, может быть разным в разных ИСО.
> Лоренцовы 4-векторы. Четверка величин (Ах) Ау) Az) AT)=
=(А, Ат), которые при переходе из системы К в систему К' пре-
преобразуются так же, как (ж, у, z, ct)) т.е. (см. D2)):
, А. - (У/с)Ат , , , _ Ат - (У/с)Ах
E0)
называется лоренцовым четырехмерным вектором (или, коротко, ло-
ренцовым 4-вектором). Величины Ах} Ау) А2 называются простран-
пространственными компонентами 4-вектора, АТ — его временной компонен-
компонентой. Сумма двух 4-векторов и произведение 4-вектора на число —
тоже 4-векторы. При изменении ИСО сохраняется величина, анало-
аналогичная интервалу: А2 = А2Т — (АJ) а также скалярное произведение
{АТВТ — А • В). Физическое равенство, записанное в виде равенства
двух 4-векторов, остается верным во всех ИСО.
> Импульс и энергия в СТО. Компоненты скорости преобра-
преобразуются не так, как компоненты 4-вектора (сравните уравнения D8)
и E0)), потому что в выражении {Г= df/dt преобразуются как числи-
числитель, так и знаменатель. Поэтому величина ]Cmj^j> соответствую-
соответствующая классическому определению импульса, не может сохраняться во
168 Физические основы механики
всех ИСО. Релятивистский 4-вектор импульса определяют как
dr m dr d(ct) с
"""" s/1-vy^'dt' Рт = m~d^~ = у/1 - v2/c2
где dr = dt yjl - v2/c2 — бесконечно малое изменение собственного
времени частицы (см. D7)), т.е. измеренное в ИСО, скорость кото-
которой равна скорости частицы в данный момент (dr не зависит от того,
из какой ИСО мы наблюдаем за частицей.) Пространственные ком-
компоненты 4-вектора образуют релятивистский импульс
mv
Р=
— v2/c2 '
а временная компонента рт оказывается равной Е/с, где Е —- реля-
релятивистская энергия частицы:
E2)
поэтому 4-вектор (р, Е/с) называют ^-вектором энергии — импульса.
Отметим, что релятивистские энергия и импульс связаны простым
соотношением:
В соответствии с E0), энергия и импульс при переходе в другую ИСО
преобразуются по закону
Релятивистская энергия частицы не равна нулю при v = 0. т.е.
она состоит из энергии покоя тс2 и кинетической энергии:
E5)
причем релятивистская кинетическая энергия при v/c <C 1 переходит
в классическую кинетическую энергию Ек = mv2/2. Так как величина
(Е/сJ — р2 сохраняется, ее можно вычислить в системе отсчета, где
частица в данный момент покоится:
^ - р2 = т2с2 или Е2 - р2с2 = гп2с\ E6)
с
Для частиц с массой, равной нулю (фотоны), связь между энергией и
импульсом принимает вид:
Е = рс E7)
1.11, Специальная теория относительности 169
(см. также E3)). Подставляя в E6) Е = тс2 + EKi получим удобное
соотношение между импульсом и кинетической энергией:
> Неупругий удар. Взаимосвязь энергии и массы. Запишем
закон сохранения релятивистской энергии для неупругого удара двух
тел массой т каждое, летевших навстречу друг другу с одинаковой
скоростью v:
тс2 . тс2 2
= Мс*.
Видно, что масса составной частицы больше суммы масс начальных
частиц. Увеличение внутренней энергии при неупругом ударе на АЕ
привело к увеличению массы на АЁ/с2. Этот пример иллюстрирует
общее соотношение Эйнштейна между релятивистской энергией по-
покоящегося тела и его массой:
Е = тс2. E8)
Релятивистская энергия включает в себя все виды внутренней
энергии.
Пример 3. Пусть энергия покоящегося тела увеличилась на АЕ. Найти
импульс этого тела в системе отсчета, движущейся со скоростью — V (V <С с).
Решение. В соответствии с формулами релятивистского преобразова-
преобразования E4) импульс равен р = (E/c2)V = (m -f AE/c2)V. Видно, что увеличение
массы соответствует формуле E8).
> Основной закон релятивистской динамики. Приложенная к
частице сила равна, как и в классической механике, производной от
импульса:
? = f, E9,
но релятивистский импульс E1) отличается от классического. Под
действием приложенной силы импульс может неограниченно возра-
возрастать, но из определения E1) видно, что скорость будет меньше с.
Работа силы E9)
/ Р <dr = f ^vdt= f vdp =
J r
= / dE
равна изменению релятивистской энергии. Здесь были использо-
использованы формулы mv = p\/l — i>2/c2, p • dp = EdE/c2 (см. E6)) и
170 Молекулярная физика и термодинамика
2. Молекулярная физика
и термодинамика
2.1. Основные положения и определения
> Два подхода к изучению вещества. Термодинамический под-
подход заключается в том, чтобы установить связи и соотношения меж-
между экспериментально определяемыми (феноменологическими) пара-
параметрами (их называют термодинамическими параметрами), опира-
опираясь на несколько постулатов (начал термодинамики).
Статистический подход опирается на молекулярно-кинетиче-
ские представления о строении вещества (основные положения мо-
лекулярно-кинетической теории):
1. Все тела состоят из огромного числа мельчайших частичек —
атомов и молекул.
2. Молекулы вещества находятся в непрерывном хаотическом
движении.
3. Молекулы взаимодействуют между собой: на больших рассто-
расстояниях притягиваются, на малых отталкиваются.
Термодинамические параметры вычисляются в рамках конкрет-
конкретной модели внутреннего строения вещества (т.е. модели движения
и взаимодействия атомов и молекул), посредством усреднения по
огромному числу состояний системы. Статистическая физика исполь-
использует методы теории вероятностей и математической статистики.
Классическая теория опирается на классические законы движения
молекул, квантовая статистика — на законы квантовой механики.
> Количество вещества. Моль. Количество вещества в систе-
системе, т.е. число содержащихся в ней структурных единиц — атомов или
молекул, измеряется в молях. Моль любого вещества содержит опре-
определенное число молекул, называемое числом Авогадро, равное числу
атомов в 12 г углерода: NA « 6,02 • 1023моль. Для числа молей по-
получим:
N т
A)
где N —число молекул в системе, т = m0N — масса системы (га0 —
масса одной молекулы), /i = m0NA — молярная масса вещества.
> Равновесные и неравновесные состояния. Уравнение со-
состояния. Термодинамическая система, находящаяся при неизменных
внешних условиях, приходит в равновесное состояние, в котором от-
отсутствуют потоки любого типа (например, потоки массы и энергии).
Термодинамические параметры равновесного состояния (давление р,
температура Т, объем V или плотность р, молярная масса // и др.)
2.1. Основные положения и определения 171
связаны уравнением состояния. Уравнение состояния идеального га-
газа (уравнение Клапейрона — Менделеева)
pV = vRT, B)
где Л « 8,31 Дж/(кмоль-К) —универсальная газовая постоянная,
было получено эмпирически и хорошо выполняется для разреженных
газов (см. разд. 2.5). Уравнение Ван-дер-Ваальса
C)
является одним из приближенных уравнений состояния реальных
плотных газов (см. разд. 2.8). Процесс изменения состояния называ-
называют равновесным [квазиравновесным), если он происходит столь мед-
медленно, что каждое промежуточное состояние можно считать равно-
равновесным. Равновесные процессы являются обратимыми.
Равновесная термодинамика рассматривает равновесные состо-
состояния и процессы. Она позволяет сделать ряд выводов о характере
и направлении протекания неравновесных процессов, происходящих
между начальным и конечным равновесными состояниями, но не да-
дает количественного описания этих процессов. Неравновесные систе-
системы— предмет физической кинетики и неравновесной термодинами-
термодинамики. Отметим, что время прихода в равновесие [время релаксации)
уменьшается вместе с размерами системы, поэтому можно говорить
о локальном равновесии в маленькой части неравновесной системы
(например, вводить температуру, меняющуюся от точки к точке).
> Простые термодинамические системы. Однородная и изо-
изотропная термодинамическая система, химический состав которой не
меняется, называется (термодинамически) простой. К простым си-
системам относятся, в частности, однокомпонентные (чистые) газы и
жидкости. Простая система обладает двумя степенями свободы, т.е.
только два ее термодинамических параметра можно считать неза-
независимыми. Равновесные состояния простой системы можно изобра-
изображать точками на плоскости (например, в координатах (р, V)), равно-
равновесные процессы — линиями на этой плоскости. Работа, совершаемая
простой системой против внешних сил, равна
fv
/
Jvx
p(V)dV, D)
где p(V) называется уравнением процесса. Так как работа не являет-
является функцией состояния, то бесконечно малая работа обозначена 6А,
чтобы отличить ее от бесконечно малого изменения функции (диф-
(дифференциала).
172 Молекулярная физика и термодинамика
Наличие связи между любыми тремя параметрами простой системы, налага-
налагаемой уравнением состояния, приводит также к связи между их производными.
—- ) dV + ( —- ) dp
oV J p \ op / у
и применив это выражение к изотермическому процессу (dT = 0), получим
(*L\ (Щ (*L\ =.!
\ЭТ )р\др Jv\dV JT
Это соотношение связывает между собой три коэффициента:
а = -— ( -—-) (температурный коэффициент объемного расширения),
VQ \ дТ / р
/3 — — ( ) (температурный коэффициент давления),
pQ \ дТ ) у
/С = — V\-z—) (изотермический модуль всестороннего сжатия).
\ oV J т
2.2. Первое начало термодинамики
> Внутренняя энергия. Теплообмен. Температура. В отличие
от механической энергии, которая может изменяться только за счет
работы, внутренняя энергия может изменяться как за счет работы,
так и при контакте с телами, имеющими другую температуру, т.е.
в процессе теплообмена. Энергия, переданная при теплообмене (под-
(подведении тепла), называется количеством теплоты или теплотой и
обозначается Q. Теплота считается положительной, если система по-
получает энергию, и отрицательной, если отдает.
При теплообмене энергия переходит от тела с большей темпера-
температурой к телу с меньшей температурой. Любая температурная шкала
должна удовлетворять этому свойству. Эмпирические температур-
температурные шкалы основаны на косвенных измерениях, т.е. на измерениях
параметров, монотонно зависящих от температуры. Газовая шкала
температур опирается на уравнение состояния идеального газа B).
Термодинамическая, или абсолютная шкала температур определяется
на основе второго начала термодинамики.
С точки зрения классической молекулярно-кинетической теории,
внутренняя энергия термодинамической системы равна сумме кине-
кинетической энергии движения ее молекул и потенциальной энергии их
взаимодействия. Внутренняя энергия U = U(V, Т, ...) —-функция со-
состояния термодинамической системы* является важнейшей характе-
характеристикой термодинамической системы.
* Зависимость U = L/(V, T, ...) называют калорическим уравнением состоя-
состояния, в отличие от термического уравнения состояния р = p(V, T).
2.2. Первое начало термодинамики 173
Термодинамика должна определять любую величину феноменологически, вне
зависимости от представлений о внутреннем устройстве вещества. Принципиаль-
Принципиальную возможность такого определения дает представление о гибкой адиабатиче-
адиабатической о болонке, которая позволяет изменять форму системы и совершать над ней
работу, но исключает ее теплообмен с внешними телами. Работа внешних сил Ае
при переходе системы из состояния 1 в состояние 2 оказывается не зависящей от
процесса перехода, а зависит только от начального и конечного состояний систе-
системы, что позволяет определить разность внутренних энергий следующим образом:
U2-Ul = Ae(l->2).
> Первое начало термодинамики. Общий закон сохранения
энергии с учетом процесса теплообмена и внутренней энергии имеет
вид:
т.е. изменение полной (механической+внутренней) энергии системы
равно работе внешних сил и теплоте, полученной при теплообмене
с внешними телами. Иногда закон сохранения энергии формулируют
как невозможность создания вечного двигателя первого рода (кото-
(который производил бы работу из ничего). Первым началом термодина-
термодинамики называют обычно применение этого закона к термодинамиче-
термодинамической системе, механическая энергия которой не меняется. Кроме то-
того, в термодинамике удобнее использовать работу системы против
внешних сил: А = — Ае. Получаем
A E)
(подведенная к термодинамической системе теплота идет на измене-
изменение ее внутренней энергии и на совершение системой работы против
внешних сил).
> Первое начало для простой системы. Теплоемкость. Ис-
Используя уравнение D), запишем первое начало термодинамики для
простой системы, получившей бесконечно малое количества теплоты:
6Q = dU+pdV. F)
Отношение SQ к изменению температуры dT называют теплоем-
теплоемкостью системы С в данном равновесном процессе (измеряется в
Дж/К):
CdT = dU + pdV. G)
Считая U в G) функцией двух переменных (V, Т), запишем
где Cv = ("лгп") — теплоемкость при постоянном объеме (см.
уравнение G)). Отсюда получим:
[(^)}V. (9)
174 Молекулярная физика и термодинамика
Видно, что теплоемкость для процесса V(T) зависит от значения про-
производной dV/dT. Так как параметры {V) T) можно менять независимо,
то эта производная, а значит, и теплоемкость в данной точке может
иметь любое значение.
> Энтальпия. Процесс Джоуля — Томсона. Если равновесный
процесс изменения состояния происходит при постоянном давлении,
то подведенная теплота
Q = AU + pAV = A(U + pV) = Д/ (р = const) A0)
равна разности энтальпий I = U+pV в конечном и начальном состо-
состояниях. Энтальпия используется также для описания процесса Джо-
Джоуля — Томсона — стационарного просачивания вещества сквозь по-
пористую перегородку (дросселирования). Этот процесс применяется
для получения сверхнизких температур. В процессе Джоуля — Томсо-
Томсона сохраняется энтальпия вещества, прошедшего сквозь перегородку:
> Внутренняя энергия идеального газа. Внутренняя энергия
идеального газа зависит только от его температуры. Эксперимен-
Экспериментальные подтверждения этому факту:
1. При расширении газа в пустоту внутри жесткой адиабатиче-
адиабатической оболочки равны нулю как работа газа А, так и полученная те-
теплота Q, а следовательно, и AU] было обнаружено, что в этом нерав-
неравновесном процессе температура идеального газа не меняется (опыты
Гей-Люссака и Джоуля).
2. Температура идеального газа не меняется в процессе Джоуля —
Томсона.
Второе начало термодинамики позволяет доказать уравнение
( ——) = 0, исходя из термического уравнения состояния B).
V oV / т
> Процессы в идеальном газе. Из уравнений G), (8) получим
изменение внутренней энергии и первое начало термодинамики для
идеального газа:
dU = Cv dT, 8Q = CvdT + p dV: A1)
Эксперименты показывают, что в широких пределах изменения
температуры Су от Т не зависит, и можно записать U = CVT+const.
Рассмотрим конкретные процессы.
1) Изотермический процесс (dT = 0). В этом случае dU = 0, т.е.
SQ=pdV, Q = A=Jvp(Ky)dV = vRTln(^j. A2)
2.2. Первое начало термодинамики 175
Теплоемкость данного процесса можно считать равной бесконеч-
бесконечности.
2) Изобарный процесс (dp = 0). Вводя теплоемкость при посто-
постоянном давлении, с учетом уравнения состояния B) получим
Ср dT = Су dT + pdV = Cv dT+vRdT.
Сокращая на dT, получим соотношения между тепло емкостями (урав-
(уравнение Майера):
Cp = Cv + vR, Cp = cv + j, С„ = Сру + 11, A3)
где с = С/т— удельная теплоемкость, аС^ = Cj\i — молярная те-
теплоемкость газа (измеряются в Дж/(кг • К) и Дж/(моль • К) соответ-
соответственно) .
3) Адиабатический процесс. Если равновесный процесс происхо-
происходит без подвода тепла (SQ = 0), то
Г =» f = -•??.
Интегрируя, получим уравнение адиабатического процесса (уравне-
(уравнение Пуассона):
TV1 = const или pV1 = const, A4)
где безразмерный параметр у = Ср/Су = 1 + (R/C^v) называется
показателем рдиабаты. Через 7> с учетом уравнения Майера A3),
можно выразить теплоемкости газа:
4) Политропный процесс. Политропным называется процесс, те-
теплоемкость которого постоянна (С = const):
CdT = CvdT + pdV =» (CV-C)dr + pdK
Проведя такие же вычисления, как для адиабатического процесса,
получим уравнение политропного процесса:
pVn = const,
R Cp-C
где п = 1 ¦+ — -р" == ~р=Г 77 — показатель политропы.
^ру ~ ^/i Су — G
у /
5) 1(ккл Карно. Циклом Карно называется замкнутый цикл, со-
состоящий из двух изотерм (при температурах Тх и Г2, Тг > Т2) и двух
176
Молекулярная физика и термодинамика
адиабат. Коэффициентом полезного действия замкнутого цикла на-
называют величину
Q2
A5)
где А — работа за цикл, Q1 —теплота, полученная от нагревателя,
Q2 — теплота, отданная холодильнику. В замкнутом цикле AU = О,
поэтому Q1 — Q2 = A.
Для цикла Карно (рис. 13) из уравнения A2) имеем:
Q, = uRTx In (ii), Q2 = vRT2 In (|j-).
Из уравнения Пуассона A4) нахо-
находим:
Отсюда следует, что ^2/^ = V3/VA.
Поэтому для КПД цикла Карно полу-
получим:
Рис. 13.
Видно, что в данном случае КПД зависит только от отношения
температур холодильника и нагревателя.
2.3. Второе начало термодинамики
> Формулировка второго начала. Приведем две наиболее из-
известные формулировки:
1. Невозможен процесс, единственным результатом которого бы-
было бы совершение работы за счет теплоты, взятой у теплового резер-
резервуара при постоянной температуре (формулировка Томсона). Эта же
формулировка, но выраженная другими словами, утверждает невоз-
невозможность создания вечного двигателя второго рода (т.е. произво-
производящего работу за счет внутренней энергии теплового резервуара).
2. Невозможен процесс, единственным результатом которого бы-
была бы передача энергии от более холодного тела к более горячему
(формулировка Клаузиуса).
Формулировки Томсона и Клаузиуса эквивалентны.
> Теорема Карно. Циклом Карно называют цикл, в котором ра-
рабочее тело получает теплоту только от резервуара при постоянной
температуре 7\ (нагревателя), а отдает — только резервуару при по-
постоянной температуре Т2 (холодильнику). Теорема Карно утвержда-
утверждает, что КПД произвольного цикла Карно не может превышать КПД
2.3. Второе начало термодинамики
177
обратимого цикла Карно, работающего при тех же Тх и Т2. Из это-
этого немедленно следует, что КПД обратимого цикла Карно зависит
только от Гх и Т2 и не зависит от природы рабочего тела.
Покажем в общих чертах, как можно доказать теорему Карно. Предполо-
Предположим, что КПД обратимой машины меньше, чем необратимой. Подберем объем
рабочего тела обратимой машины так, чтобы она совершала за цикл такую же
работу, как необратимая. С учетом A5) неравенство для КПД приобретает вид
AIQ\6 < A/Q?606, откуда имеем Q\6 > QJeo6. Пустим обратимую машину в
обратную сторону так, чтобы работа необратимой машины потреблялась обра-
обратимой. За цикл объединенной машины ее работа будет равна нулю, а нагреватель
получит энергию <2°б — Q^eo6 > 0, целиком взятую у холодильника. Мы пришли
к противоречию с формулировкой Клаузиуса.
Так как нам известен КПД одной из машин Карно —газовой A6),
то теорему Карно можно записать так:
Т1-Т2
ИЛИ
A7)
причем равенство соответствует обратимому циклу Карно.
Термодинамическая шкала температур. Теорема Карно позволяет опре-
определить шкалу температур, не зависящую от свойств конкретных тел. Отношение
температур двух тел определяют, присоединив к ним обратимую машину Карно;
так как отношение Q1/Q2 зависит только от их температур, то его можно при-
принять равным отношению термодинамических температур: 91/в2 = Q1/Q2' Как
видно из A7), отношение термодинамических температур равно отношению га-
газовых температур (в той области, где газовая шкала определена).
> Второе начало: вычисление внутренней энергии. Второе
начало термодинамики позволяет вывести важное соотношение для
внутренней энергии простой системы, которое не может быть полу-
получено в рамках первого начала:
Е\
dv)T
dT)
A8)
Покажем, как можно получить A8) из теоремы Карно. Рассмотрим (беско-
(бесконечно) малый обратимый цикл Карно и изобразим его в координатах (р, V). Ра-
Работа системы за цикл, равная площади маленького параллелограмма (рис. 14), не
изменится при замене кусочков адиабат вертикальными отрезками, длина кото-
которых равна ( I AT. Умножив на высоту ДУ, получим 8А =
\ дТ ) у
Теплота, полученная на верхней изотерме, рав-
равна SQi = AU + pdV =
дТ
ATAV.
для приращения AU при постоянной температу-
температуре использовано (8). Из теоремы Карно и урав-
уравнения A7) имеем
SA
AT
Т
AT
Т
T+dT
откуда получим A8).
Рис. 14.
178 Молекулярная физика и термодинамика
Приведем несколько применений формулы A8).
1) Внутренняя энергия идеального газа. Подставим в A8) урав-
1 • ?$Т Т
нение состояния р = —vRT. В результате получим ( -р-тт) = 0, т.е.
V \ oV / т
внутренняя энергия идеального газа не зависит от объема.
2) Внутренняя энергия газа Ван-дер-Ваальса. Выразив давление
из уравнения состояния C) и подставив в A8), приходим к формуле
(dU\ аи2 .
\WJt = IP'Значйт'
Кроме того, имеем
~dV~)T = ~dv[\dTjy\ =lff[\dv)T\ =~dT\VT)v = Oi
т.е. Cv не зависит от объема. В области температур, где Су слабо
зависит от Г, можно записать
/7 _ г* т а1/ /1 п\
U — \jy ± — ~~Z . yl&J
3) Общая формула для Ср — Су. Подставляя A8) в уравнение (9)
и фиксируя давление (р — const), получим:
(здесь использовано соотношение между производными, рассмотрен-
рассмотренное в конце разд. 2.1). Неотрицательность полученного выражения
( др \ ^ _
следует из условия механической устойчивости: -ттт- ^0.
\ OV /т
> Неравенство Клаузиуса. Неравенство A7) является частным
случаем неравенства Клаузиуса, относящегося к любому замкнутому
циклу. Если в замкнутом цикле система получает теплоты Qx, ..., QN
от внешних резервуаров, имеющих температуры Tf, ..., Tj^, то удо-
удовлетворяется неравенство»
Е|Н0 или /~Й'о. B0)
1 J 2
Для обратимого процесса неравенство превращается в равенство,
а температура резервуара, с которым система в данной точке цикла
обменивается теплом, равна температуре системы: Те = Т. В этом
случае получим
/? = 0. B1)
обр
Равенство B1) служит основой для определения еще одной функ-
функции состояния — энтропии (см. разд. 2.4).
2.4. Энтропия. Свободная энергия 179
2.4. Энтропия. Свободная энергия
> Определение энтропии. Уравнение Клаузиуса для обратимого
цикла B1) можно переформулировать как условие независимости
интеграла
Г» 6Q_.
Ja T
IA
от пути равновесного перехода из состояния А в состояние В.
Это позволяет определить функцию состояния — энтропию, точнее,
разность энтропии в двух состояниях:
я fB SQ
Ja T
SQ ня (\
1 обр
При равновесном процессе без подвода тепла энтропия не меняется
(адиабатический процесс можно называть изоэнтропным). Первое
начало термодинамики F) для равновесного процесса в простой
системе приобретает вид:
TdS = dU + pdV. B3)
> Примеры вычисления энтропии.
1. Процесс с постоянной теплоемкостью. Изменение энтропии
при изменении температуры от Тх до Т2 равно
2. Энтропия идеального газа. Подставляя в B3) выражение для
внутренней энергии идеального газа A1), с учетом уравнения состо-
состояния pV = vRT получим
irp /71/
Иногда условно записывают 5 = у{С^у 1пГ+ RIn V), имея в виду, что
в приложениях всегда возникает разность энтропии.
3. Энтропия газа Ван-дер-Ваальса. Подставляя в B3) зависи-
зависимость A9), с учетом уравнения состояния C) имеем
^ 6Т аи2 dV p ,_. ^ dT uRdV
S = v\C^v lnT + R]n{V - i/6)].
> Направление неравновесных процессов в теплоизолиро-
теплоизолированной системе. Рассмотрим неравновесный процесс, переводящий
180 Молекулярная физика и термодинамика
систему из равновесного состояния 1 в равновесное состояние 2. Те-
Теперь вернемся из 2 в 1 при помощи любого равновесного процесса,
запишем для получившегося циклического процесса неравенство Кла-
узиуса B0) и учтем определение энтропии B2):
Если неравновесный процесс происходит в адиабатической оболочке,
то левая часть равенства обращается в нуль, что дает
52 ^ Slt B7)
т.е. в любом процессе без подвода тепла энтропия не убывает.
Равновесное состояние теплоизолированной системы соответствует
максимуму энтропии.
> Примеры неравновесных процессов.
1. Теплообмен. Рассмотрим простейший пример теплообмена —
между двумя телами с одинаковой теплоемкостью С и начальными
температурами 7\ и Г2. Из уравнения теплового баланса следует, что
в результате теплообмена оба тела достигнут одинаковой темпера-
температуры Тк = у(Тх + Г2). При этом согласно B4) изменение энтропии
системы будет положительным:
(аргумент логарифма больше единицы, так как среднее арифметиче-
арифметическое больше среднего геометрического).
2. Расширение идеального газа в пустоту. Внутренняя энергия
и, следовательно, температура идеального газа при расширении его
в пустоту остаются постоянными. Изменение энтропии находим из
формулы B5):
(|^ B8)
Возрастание энтропии при адиабатическом расширении в пустоту
(увеличении V при постоянной U) можно доказать для любой простой
системы. Если рассматривать 5 в B3) как функцию переменных
([/, V), то получим
Qyu Y
3. Смешение газов. Рассмотрим теплоизолированный сосуд, раз-
разделенный перегородкой на две равные части, в каждой из которых
содержится по одному молю идеального газа при одинаковых темпе-
температурах и давлениях. При убирании перегородки газы смешивают-
смешиваются; из формулы B8) следует, что энтропия системы увеличивается
2.4. Энтропия. Свободная энергия 181
на 2Л1п2 (энтропия смешения). В случае различных газов началь-
начальное состояние отличается от конечного; газы можно снова разделить,
совершая работу над специальными поршнями, пропускающими мо-
молекулы только одного сорта. Однако для одинаковых газов начальное
и конечное состояния системы тождественны, и энтропия не должна
меняться. Отсутствие непрерывного перехода от почти одинаковых к
полностью тождественным молекулам называют парадоксом Гиббса.
> Статистический смысл энтропии. Формула Больцмана
S = klnu B9)
(к — постоянная Больцмана) связывает энтропию макроскопическо-
макроскопического состояния со статистическим весом этого состояния, т.е. чис-
числом различных микроскопических состояний, которые его реализу-
реализуют. Чем больше Я, тем больше вероятность состояния; при неравно-
неравновесных процессах система переходит от менее вероятных к более ве-
вероятным состояниям. Логарифм обеспечивает аддитивность энтро-
энтропии: статистический вес системы, состоящей из двух независимых
подсистем, равен произведению их статистических весов.
Чтобы проиллюстрировать формулу B9), вычислим пространственную часть
энтропии газа. Разобьем объем на маленькие ячейки объемом v. Каждая моле-
молекула может быть помещена в любую из V/v ячеек, т.е. число независимых со-
состояний равно П = (V/v) , где N — число молекул газа. Для энтропии получим
S = ЫпП= kN\n(V/v) = vR\n(V/v). Квантовая статистика утверждает, что оди-
одинаковые частицы принципиально неразличимы, т.е. П надо разделить на число пе-
перестановок между ними N\. В результате для пространственной части энтропии
получим выражение S = kN\n(V/Nv). Нетрудно убедиться, что таким образом
удается разрешить парадокс Гиббса.
> Третье начало термодинамики. Третье начало термодинами-
термодинамики (теорема Нернста) утверждает, что при приближении темпе-
температуры к абсолютному нулю энтропия любой системы стремится
к определенному конечному значению, не зависящему от значения
остальных термодинамических параметров. Энтропию системы при
Г = 0 принимают равной нулю. Статистическое объяснение: при
Г = 0 система находится в наинизшем энергетическом состоянии,
кратность которого (равная статистическому весу системы п при
Т = 0) невелика. Значит, в соответствии с формулой Больцмана B9)
энтропия пренебрежимо мала. Следствия третьего начала: при Т -* 0
теплоемкости Cv и Ср системы, а также ее температурные коэффи-
коэффициенты объемного расширения а и давления /3 стремятся к нулю.
> Система в термостате. Свободная энергия. Рассмотрим из-
изменение состояния системы, находящейся в тепловом контакте с тер-
термостатом, имеющим постоянную температуру Т. Такую же темпе-
температуру будет иметь сама система в начальном и конечном равновес-
равновесных состояниях. Неравенство B6) после «цепочки» преобразований
182Молекулярная физика и термодинамика
(U2-U1)+A^TS2-TS1
принимает вид:
*1-*2?Д C0)
где Ф = U - TS — новая функция состояния, называемая свободной
энергией. Если объем системы не меняется, то в рассматриваемом
неравновесном процессе
т.е. свободная энергия не возрастает. Другими словами, равновесное
состояние системы постоянного объема, находящейся в тепловом кон-
контакте с термостатом, соответствует минимуму свободной энергии.
Для равновесного процесса неравенство в этих уравнениях превра-
превращается в равенство. Из формулы B3) следует, что
dV = -SdT-pdV. C1)
Поэтому естественными переменными для свободной энергии явля-
являются объем и температура: Ф = Ф(У,Г).
Если у системы в термостате есть механический контакт (легкий
поршень, гибкая оболочка) с внешней средой, имеющей фиксирован-
фиксированное давление р (такое же давление будет у самой системы в равновес-
равновесном состоянии), то работа против внешних сил равна А = p(V2 — VJ.
Из C0) получим
^i+pV1^92+pV2 или ФХ^Ф2, C2)
где Ф = ФЧ"р1^ = ?7 — TS + pV — термодинамический потенциал
Гиббса (при обратимом процессе Ф = const). Равновесному состо-
состоянию для системы в термостате и гибкой оболочке соответствует
минимум Ф(р,Г). Так как dФ = -5dT + Vdp, то естественными пе-
переменными для термодинамического потенциала являются давление
и температура: Ф = Ф(р,Т). При постоянных давлении и температу-
температуре термодинамический потенциал пропорционален количеству веще-
вещества: Ф(р, Г, га) = тпф (ф — удельный термодинамический потенциал)
иди Ф(р, Г, N) = Nfi (// — термодинамический потенциал в расчете на
одну частицу, или химический потенциал).
Канонические уравнения состояния. Естественные переменные. Хо-
Хотя функции U, I, 5, Ф, Ф могут рассматриваться в любых независимых перемен-
переменных, для каждой из них существуют естественные переменные. Для энтропии
это переменные (U, V), для энтальпии— (U, р), для свободной энергии— (У, Т),
для потенциала Гиббса— (р, Т). Функция в естественных переменных называ-
называется каноническим уравнением состояния. Зная любое каноническое уравнение,
можно получить как термическое, так и калорическое уравнения состояния. На-
(ЭФ \ / 9Ф \
—-- ) дает выражение для p(V, Т), а выразив 5(V, Г) = - ( —- ] ,
найдем С/(У,Т) = Ф +Т5.
2.5. Кинетическая теория идеального газа
183
2.5. Кинетическая теория идеального газа
*> Основное уравнение^ кинетической теории идеального
газа. С точки зрения молекулярно-кинетической теории, газ счи-
считается идеальным, если можно пренебречь потенциальной энергией
взаимодействия его молекул (по сравнению с кинетической энергией)
и размерами молекул (по сравнению со средним расстоянием между
ними). Давление газа на стенку возникает в результате многочислен-
многочисленных упругих соударений молекул между собой и со стенками сосуда.
(Удары можно считать в среднем упругими, так как газ находится со
стенкой в тепловом равновесии.) Основное уравнение кинетической
теории идеального газа выражает давление через средний квадрат
скорости молекул:
р = ±n(pv) = ±nmQ(v2) = |n(enocT), C3,
где п = N/V — концентрация молекул, га0 — масса одной молекулы,
р = mQv — ее импульс, (еПОСТ) = (\тоу2)— средняя кинетическая
энергия поступательного движения молекулы.
Если связь энергии и импульса отличается от классической, то
последнее равенство в C3) приобретает иной вид. Для газа фотонов
имеем р = е/с (см. разд. 1.11). В результате получим
Р =?"<«>• C4)
> Число ударов о стенку. Число молекул AN, попадающих за
время At на плоский участок поверхности площадью AS, равно
AN n(v)
4 "
C5)
ASAt
Формулы для вычислений. Формулы для переноса через площадку числа
частиц, импульса, энергии и т.д. получают разбиением молекул на удобные груп-
группы и вычислением их вклада в вычисля-
вычисляемую величину. Наиболее общий под-
подход — разбиение на группы, имеющие
почти одинаковую скорость гТ. Выде-
Выделим группу молекул, имеющих величи-
величину скорости от г» до v + dv, а направле-
направление в телесном угле d?l.Число молекул
данной группы в единице объема равно
dn(v, v + dv\ dd) = rfn(v, v + dv)du/4ir.
Чтобы найти, сколько молекул дан-
данной группы попадает на плоский уча-
участок площадью А5 за время At, на-
надо построить на этом участке косой
цилиндр (рис. 15), направляющая ко-
которого имеет длину г>Д* и составляет
угол 9 с осью х. Все молекулы выде- Рис. 15.
ленной группы, находящиеся в этом ци-
цилиндре (и только они!), попадут на площадку AS за время At. Производя по-
последовательные интегрирования, можно вывести C5) и многие другие формулы,
например для проносимой через площадку энергии:
AJE7 _ m0n(v3)
ASAt ~ 8
V X
C6)
184 Молекулярная физика и термодинамика
> Определение температуры в кинетической теории газов.
В кинетической теории газов доказывается, что если две подсистемы
(из одинаковых или разных молекул) могут обмениваться энергией,
то в состоянии равновесия оказываются равными средние кинетиче-
кинетические энергии поступательного движения их молекул. Исходя из этого,
кинетическая теория газов определяет температуру как величину,
пропорциональную средней кинетической энергии поступательного
движения молекул:
/с \ __ 3 игр /Q7\
где к — постоянная Болъцмана, которая выражается через уни-
универсальную газовую постоянную и число Авогадро (см. разд. 2.1):
к = R/NA « 1,32 • 10~23 Дж/К. Коэффициент пропорциональности вы-
выбран так, чтобы уравнение состояния идеального газа
N , ч
„ — /п ЬПН —— г.пн (QQA
(оно получается из основного уравнения C3) и определения темпера-
температуры C7)) совпадало с уравнением B), в котором используется газо-
газовая шкала температур.
Средняя квадратичная скорость поступательного движения мо-
молекул с учетом C3) и C7) вычисляется по формулам
C9)
где р = топ — плотность газа.
> Внутренняя энергия идеального газа. Важной характери-
характеристикой идеального газа является число степеней свободы его моле-
молекулы г. У одноатомной молекулы есть только три степени свободы,
соответствующих поступательному движению: г = гп = 3. У жесткой
двухатомной молекулы, кроме поступательных, есть еще две враща-
вращательные степени свободы (полярные углы, задающие ее направление
в пространстве): г = гп + гвр = 3 + 2 = 5. У жесткой многоатомной (не-
(нелинейной) молекулы — три вращательные степени свободы, поэтому
г = 6. В классической статистической физике доказывается теорема
о равнораспределении энергии по степеням свободы: на любую сте-
степень свободы, которой в выражении для энергии молекулы соответ-
соответствует член ах2 или /?i2, приходится средняя энергия \кТ в расчете
на одну молекулу. Формула C7) находится в полном соответствии
с утверждением этой теоремы. Средняя энергия одной молекулы и
внутренняя энергия всего газа принимают вид:
D0)
2.5. Кинетическая теория идеального газа 185
Физическое число степеней свободы гф в случае жестких молекул
совпадает с математическим. Однако, когда оказываются возбужден-
возбужденными колебательные степени свободы (при Т ~ 103 К), то на ка-
каждую колебательную степень свободы будет приходиться (с учетом
потенциальной энергии колебаний) средняя энергия кТ. В результа-
результате получим г'ф ==¦ гп + гвр -f 2гкол, где гкол обозначает математиче-
математическое число колебательных степеней свободы. Для JV-атомной молеку-
молекулы гкол = 3N — гп - гвр (например, для мягкой двухатомной молекулы
|ф = 3 + 2 + 2F-5) = 7).
Из D0) получим выражения для теплоемкостей идеального газа и
его показателя адиабаты (см. разд. 2.2):
С и+ 2
D1)
При комнатных температурах измеряемая теплоемкость соответствует мо-
модели жестких молекул— колебательные степени свободы оказываются невозбу-
невозбужденными или, как говорят, ¦замороженными». Однако при повышении темпера-
температуры до ** 103 К теплоемкость начинает возрастать, т.е. колебательные степе-
степени свободы ¦размораживаются». Наоборот, при понижении температуры до не-
нескольких десятков Кельвинов происходит «вымораживание» вращательных степе-
степеней свободы, сопровождающееся соответствующим уменьшением теплоемкостей.
Объяснение явлению вымораживания степеней свободы дает квантовая механи-
механика: если средняя энергия теплового движения кТ мала по сравнению с расстоянием
до ближайшего дискретного уровня, то данный вид движения не возбуждается.
> Смесь идеальных газов. Закон Дальтона: давление смеси двух
идеальных газов равно сумме их парциальных давлений:
Р = Pi •+ Р2 = (П1 + П2)кТ = ( + Ъ)RT'
Внутренняя энергия смеси равна сумме внутренних энергий
U = уг11/1ДГ+ Yhu2^- Эта формула позволяет ввести:
эффективное число степеней свободы: г{их + v2) = i\Vx + i2v2,
эффективные молярные теплоемкости: (j'i+J'JC^ = ^iCf/il + i/2C/i2>
эффективную молярную массу: {у1 + и2)М = ^Mj 4- ^2^2-
> Распределение Максвелла. Распределение молекул по скоро-
скоростям описывается следующими функциями:
f{v)dv =
dv. dvy dvz =
v. dvy z
Определение любой функции распределения основано на утвержде-
утверждении, что доля молекул, попадающих (в среднем) в очень маленький ин-
интервал данной переменной (скорости, проекции скорости, энергии),
пропорциональна ширине этого интервала (dv обозначает физиче-
физически, а не математически, бесконечно малый интервал — он должен
186
Молекулярная физика и термодинамика
содержать большое число молекул.) Среднюю долю молекул, обла-
обладающих некоторым признаком (например, попадающих в заданный
интервал скоростей), можно трактовать как вероятность того, что
произвольная молекула обладает данным признаком. Поэтому функ-
функцию распределения иногда называют плотностью вероятности:
Перечислим свойства функции распределения (на примере f(v)):
1) Доля частиц (вероятность) в конечном интервале (уг)У2)'
-Г
f(v)dv.
2) Нормированность:
f(v)dv = 1.
D3)
3) Вычисление среднего от любой функции скорости x(v):
Ш)= Г\{v)f(v)dv. D4)
Jo
Между тремя функциями распределения, определенными в D2),
существуют следующие связи:
f(v) =
{ух) vy) vz) =
Функция (р является четной функцией, т.е. можно написать: у? = у?(и2).
Функция Ф(у) зависит только от v2 = v2x + vy + v\. Связь между Ф и
(р удовлетворяется только функцией <p(vx) = -Аехр(—С^)- Коэффици-
Коэффициенты А и С определяются из двух условий: а) нормировки функции ^,
б) требования, чтобы (v^) = j(t>2) = кТ/т0) см. C9). Ответ выглядит
так:
AT
/(«) =
Обычно именно последнюю
формулу называют распределе-
распределением Максвелла (рис. 16). Функ-
Функция f(v) достигает максимума
при скорости vB = BkT/mo)ll2,
которую называют наиболее ве-
вероятной скоростью. Значение
функции f(v) в этой точке рав-
равно f(vB) = 4Bе2тгкТ/т0)'^2. На-
Например, при увеличении Г в 4 раза максимальная скорость ста-
станет в 2 раза больше, а соответствующее значение функции f(vB) —
2.5. Кинетическая теория идеального газа 187
в 2 раза меньше; напомним, что площадь под кривой f(v) равна еди-
единице.
Средняя (или среднеарифметическая) скорость молекул вычисля-
вычисляется в соответствии с правилом D4): -
00
(v)'=jvf{v)dv =
тгМ
о у
Приведем также распределение молекул по энергиям поступательного
движения:
de) 2
Интегралы для вычислений. Для вычисления средних с распределением
Максвелла нужно уметь вычислять интегралы типа /п = Г хп ехр(—/3х2) dx.
Приведем два первых результата: /0 = у>/тг/?/2, 1Х = у/0. Дальнейшие ин-
интегралы получим дифференцированием по /3. Например, 12 = —77Г =: "n/^/3~ •
> Распределение Больцмана. Если газ находится во внешнем
силовом поле, то концентрация молекул зависит от координат. Из
условия механического равновесия газа можно получить:
D6)
где еп(г) —потенциальная энергия молекулы во внешнем поле (рас-
(распределение Больцмана). Частным случаем распределения Больцмана
является барометрическая формула:
Поясним на примере барометрической формулы, как выводится распределе-
распределение Больцмана. Условие равновесия в поле тяжести вертикального цилиндра с
площадью основания s и высотой dh имеет вид: sdp = —p(sdh)g. Отсюда с уче-
d
« т dn ШоЭ
том уравнении р = пкТ и р = топ получим —¦¦ = ftrn- Интегрируя, приходим
dh ki
к барометрической формуле.
> Распределение Максвелла — Больцмана. Оба распреде-
распределения — Максвелла D5) и Больцмана D6) — содержат выра-
выражение exp(—e/kT). Распределение Максвелла — Больцмана вы-
выражает вероятность того, что произвольная молекула из сосу-
сосуда, содержащего N молекул, находится в области пространства
(ж, х + dx\ у) у + dy\ z) z 4- dz) и имеет скорость в интервале
(vx} vx + dvx\ vyi vy + dvy\ v2, v2 + dv2):
dN dn(f)d3f п(г)Ф(у) |3_з^ A ( e \j3^
1Г = N = AT drdV = AeX?\lT Г V
188
Молекулярная физика и термодинамика
Здесь d3f = dx dydz, d3v = dvx dvy dvz> e = \rn0v2 -\~ ?n(r) — механи-
механическая энергия молекулы, А — коэффициент, который можно найти
из условия нормировки. Общее распределение Максвелла — Больцма-
на применимо к любым видам энергии молекулы: энергии вращения,
энергии колебаний, потенциальной энергии, зависящей от ориента-
ориентации молекул, и т.д.
2.6. Реальные газы.
Уравнение Ван-дер-Ваальса
> Изотермы реального газа. Если температура газа меньше
критической (см. ниже), то при равновесном изотермическом умень-
уменьшении его объема наблюдаются
следующие процессы (рис. 17):
1. До точки А давление воз-
возрастает. Если температура да-
далека от критической, то вплоть
до точки А хорошо выполняется
уравнение состояния идеального
газа.
2. На участке АВ давление в
системе не меняется. В сосуде
появляется жидкость, отделенная
от газа четкой границей (поверх-
(поверхностью раздела). Газ, находящий-
находящийся в равновесии с жидкостью, называют насыщенным паром. От-
Отношение масс жидкости и пара в произвольной точке равно отно-
отношению горизонтальных отрезков, на которые эта точка делит АВ:
тж/тП = АС/СВ. Участки изотерм ALX и L2B соответствуют ме-
тастабильным состояниям, т.е. состояниям, в которых система мо-
может существовать некоторое время, но потом быстро переходит в
устойчивое состояние на линии АВ. (Имея в виду процессы при по-
постоянном давлении или объеме, их называют переохлажденным па-
паром или перегретой жидкостью.) Существование метастабильных
состояний объясняется тем, что образование маленьких зародышей
новой фазы (жидкости в паре или пара в жидкости) невыгодно из-за
поверхностной энергии (см. разд. 2.8).
3. После точки В давление резко возрастает. В сосуде находится
только жидкость.
Чем выше температура, тем короче горизонтальный участок изо-
изотермы. Наконец, при критической температуре Тк от горизонталь-
горизонтального участка остается только точка перегиба К (рис. 17). Давле-
Давление в этой точке называют критическим давлением рк) а объем од-
одного моля газа в этом состоянии— критическим объемом VK. При
2.6. Реальные газы. Уравнение Ван-дер-Ваальса
189
Т >ТК изотерма представляет собой плавную монотонную функцию.
Область выше критической изотермы называют (истинным) газом
(его нельзя изотермически перевести в состояние «жидкость-Ь пар»),
а область под критической изотермой делится на три: жидкость, не-
ненасыщенный пар и жидкость + насыщенный пар. Из области «П» в
область «Ж» можно перейти плавно, обойдя область «П + Ж», т.е.
газ и жидкость отличаются только количественными показателями.
> Уравнение Ван-дер-Ваальса для одного моля идеального газа
имеет вид
D8)
(Уравнение C) из разд. 1.1 для v молей получается подстановкой
VM = V/v.) Постоянная 6 учитывает уменьшение свободного объема
для движения молекул за счет их собственного объема; она считается
равной учетверенному объему всех молекул: 6 = ANA • ~тгс/3. Член
a/Vjf учитывает уменьшение давления за счет взаимного притяжения
молекул; это особенно ясно видно из выражения для внутренней
энергии газа Ван-дер-Ваальса: U = С^уТ — a/V^.
Среднее взаимодействие между молекулами описывают модельным выраже-
выражением для потенциальной энергии, содержащим два члена: первый соответствует
сильному отталкиванию на малых расстояниях (^ 10"0 м), второй— ван-дер-
ваальсовским силам притяжения на больших расстояниях (рис. 18):
Минимум Еи соответствует среднему расстоянию между молекулами в отсут-
отсутствие теплового движения. При кТ -С Ет-хп движение молекул сводится к коле-
колебаниям возле дна ямы (твердое тело), случай кТ ~ Emm соответствует жидкому
состоянию, а случай кТ ^> i?min — газообразному. Ввиду крутого наклона «от-
талкивательной» ветви положение точки поворота при сближении молекул газа
слабо зависит от их средней энергии (см. также разд. 1.5).
> Изотермы газа Ван-дер-Ваальса. Вычисление критиче-
критических параметров. На рис. 19 изображены изотермы газа, описы-
описываемого уравнением D8). На участке КХК2 не выполняется условие
Рис. 18.
Рис. 19.
190 Молекулярная физика и термодинамика
механической устойчивости I -г—г ^0, переход между правой и
V oV / т
левой ветвями происходит по горизонтальному участку АВ. Прави-
Правило Максвелла: положение отрезка АВ определяется условием равен-
равенства заштрихованных площадей. (В противном случае изотермиче-
изотермический цикл АКХК2ВА производил бы работу, что противоречит вто-
второму началу термодинамики.) Участки АКг и К2В соответствуют
метастабильным состояниям.
/ op \
В критической точке выполняются сразу два условия: -г— = 0
V oV /т
д2р
= 0. Выразив р из D8) и подставив в эти уравнения, найдем:
dV2
к" ' Рк~ 27 б2' к" 27 ЬД"
Критические параметры удовлетворяют соотношению: ркУк = -jRTK. Если
ввести относительные переменные v = V^/VK, тг = р/рк и в =¦ Т/Тк> то D8)
принимает вид:
(г,- ¦!-)(*+ ЗгГ-2)=¦§-*,
единый для всех газов. Значит, уравнение Ван-дер-Ваальса удовлетворяет уста-
установленному экспериментально принципу соответственных состояний, который
утверждает, что если две относительные переменные двух газов совпадают, то
совпадает и третья. Этот закон хорошо выполняется для большинства газов.
2.7. Равновесие фаз. Фазовые переходы
> Условия равновесия фаз. Фазой называется часть системы,
однородная по физическим и химическим свойствам. Одно и то же
по химическому составу вещество может находиться в разных фазах.
Примерами двухфазной системы являются: (жидкость-f насыщенный
пар), (твердое тело-fжидкость) и (твердое тело-fnap).
Условия равновесия фаз: 1) равенство давлений — механическое
равновесие; 2) равенство температур — тепловое равновесие; 3) ра-
равенство химических потенциалов (или удельных потенциалов Гибб-
са) — равновесие по отношению переходу вещества из одной фазы в
другую. Последнее условие соответствует минимуму термодинамиче-
термодинамического потенциала Гиббса Ф = fi1N1 -f/i2(A^ —A^x) (см. разд. 2.4) по от-
отношению к числу частиц в одной из фаз Nx. Условие /ix{p) T) =jJ.2(P> T)
дает (для простой системы) уравнение для кривой сосуществования
фаз р{Т)\ двухфазная простая система имеет только одну степень
свободы. Так, давление насыщенного пара (положение горизонталь-
горизонтального участка изотермы, см. разд. 2.6) является однозначной функци-
функцией температуры; то же самое относится к зависимости температуры
плавления от внешнего давления [кривая плавления) и к зависимости
от температуры давления пара над твердой поверхностью [кривая
возгонки).
2.7. Равновесие фаз. Фазовые переходы 191
Вода
Лед
Пар
На рис. 20 приведены все три ^
кривые (существования, плавления и ^
возгонки) для воды. Точка пересече-
пересечения этих кривых называется трой-
тройной точкой (для воды t3 = — 0,15°С).
Для существования трехфазной си-
системы должны выполняться сразу
два условия: ^п(р,Т) = (*ж{р,Т) и
^ж(р, Т) = /iTB(p, T), которые однознач-
однозначно определяют ее" давление и темпе-
ратуру.
^ Фазовый переход первого рода. Теплота и энтропия пе-
перехода. Чтобы в двухфазной системе перевести часть вещества мас-
массой m из одной фазы в другую, не меняя при этом давления и темпе-
температуры, надо сообщить системе теплоту Q — mq) которую называют
(скрытой) теплотой фазового перехода (q — удельная теплота пе-
перехода). При переходе вещества в новую фазу ее энтропия изменилась
на AS = Q/T = mq/T) а внутренняя энергия на AU = mq — mpAv
(v = V/m— удельный объем). Величину As = q/T называют удельной
энтропией перехода, а Аи = q — pAv — изменением удельной энергии
при переходе. Переход вещества между фазами двухфазной системы,
связанный с поглощением (выделением) теплоты перехода и сопро-
сопровождающийся скачкообразным изменением внутренней энергии, эн-
энтропии, плотности (объема) и др., называется фазовым переходом
первого рода.
^ Уравнение Клапейрона — Клаузиуса. Если изменить темпе-
температуру двухфазной системы, то ее давление изменится таким обра-
образом, что химические потенциалы (или удельные потенциалы Гиббса)
фаз останутся равными: d</>i = d$2) или — sx dT + vx dp-=- —s2 dT + v2 dp
(см. разд. 2.4). Получаем, что наклон кривой фазового равновесия
равен
dp_ As_ _g_
dT Av TAv K }
(уравнение Клапейрона — Клаузиуса). Например, для перехода
лед — вода при атмосферном давлении температура плавления рав-
равна 273 К, q = 3,34 • 105 Дж/кг, vB - ул = -0,91 • 10 м3/кг, и мы
получим —-— = —1,1 • 107 Па/К. Знак минус объясняется аномальным
а±
свойством воды: при плавлении (таянии) ее плотность увеличивается.
Пример 1. Если непрерывно подводить к жидкости теплоту, то в тот мо-
момент, когда ее температура достигает значения, при котором давление насыщен-
насыщенного пара равно внешнему давлению, наступает интенсивное парообразование во
всем объеме жидкости, которое называют кипением. Уравнение D9) определяет
зависимость температуры кипения от внешнего давления. Пренебрегая удель-
удельным объемом жидкости и выражая удельный объем пара из уравнения состояния
192 Молекулярная физика и термодинамика
RT dp iiqp
идеального газа: v = , получим приближенное уравнение -— = . Напри-
VP dT RT2
мер, для воды (fji = 18 г/моль) при атмосферном давлении р = 105 Па температура
кипения равна Т = 373 К, удельная теплота q = 2,26 • 106 Дж/кг, и мы получим
^ = 3,5- 103 Па/К.
> Фазовый переход второго рода. При фазовом переходе вто-
второго рода (точка Кюри перехода в ферромагнитное состояние, точка
перехода жидкого гелия в сверхтекучее состояние и др.) плотность,
внутренняя энергия, энтропия изменяются непрерывно, а различного
вида производные этих термодинамических функций (восприимчиво-
(восприимчивости) — теплоемкость, сжимаемость, диэлектрическая или магнитная
проницаемость и т.д. — изменяются скачком или проявляют критиче-
критическое поведение (стремятся к бесконечности при приближении к точке
перехода). Фазовый переход второго рода происходит сразу во всем
объеме. В результате перехода происходит качественное изменение
внутреннего строения — появляется (или исчезает) дополнительная
симметрия.
2.8. Поверхностное натяжение
> Коэффициент поверхностного натяжения. Молекулы в по-
поверхностном слое жидкости обладают большей потенциальной энер-
энергией по сравнению с молекулами в объеме (меньше «соседей», энер-
энергия взаимодействия с которыми отрицательна, — см. рис. 18). При
постоянной температуре дополнительная энергия пропорциональна
площади поверхности Е\
Фпов = a(T)S, E0)
где удельную свободную энергию поверхности а называют коэффи-
коэффициентом поверхностного натяжения. При равновесном изотермиче-
изотермическом изменении площади прямоугольного участка поверхности рабо-
работа внешней силы равна изменению свободной энергии C0). Поэтому
А = ДФПОВ = aAU = aLx, где L —длина прямолинейного отрезка
границы, х — его перемещение. Отсюда следует, что на отрезок гра-
границы действует сила поверхностного натяжения, перпендикулярная
к этому отрезку и направленная вдоль поверхности жидкости:
^пов = *!>• E1)
Равновесие соответствует минимуму свободной энергии, следова-
следовательно, жидкость или жидкая пленка стремятся уменьшить свою по-
поверхность: в невесомости жидкая капля принимает форму шара.
2.8. Поверхностное натяжение 193
>> Термодинамика поверхностного слоя. Так как Фпов является
функцией (Т, ?), то с№ = adL + ?~pfr dT. Отсюда с учетом C1) по-
получим выражения для энтропии поверхностного слоя, его внутренней
энергии и теплоты, поглощаемой поверхностным слоем при изотер-
изотермическом увеличении площади:
При увеличении температуры Т коэффициент поверхностного натя-
натяжения а уменьшается и при критической температуре обращается в
нуль.
>> Добавочное давление под искривленной поверхностью. Из
условия механического равновесия поверхностного слоя следует, что
давление внутри выпуклой поверхности должно быть больше, чем
снаружи. Добавочное давление Ар в случае сферической поверхности
найдем, увеличив (мысленно) радиус шара на dR и приравняв работу
внешних сил над поверхностным слоем к изменению его свободной
энергии: ApdV = adU => Apd(^7rR3) = <7б?Dя\й2). В результате
получим
Ар=1Г- E2)
Обобщением этой формулы является формула Лапласа:
где Rx, R2 — главные радиусы кривизны (радиусы кривизны в сече-
сечении поверхности взаимно перпендикулярными плоскостями, проходя-
проходящими через нормаль к поверхности в данной точке).
> Краевой угол. Смачивание. Поверхность жидкости образу-
образует с твердой поверхностью угол, который называют краевым. Вели-
Величина краевого угла зависит от со-
соотношения между коэффициентами вода
поверхностного натяжения на гра-
границах жидкость — воздух (о"ж_в),
жидкость — твердое тело (сгж_т) и „ тв тело
твердое тело — воздух (<гт_в). Из Рис ^
условия механического равновесия
элемента жидкости на линии пересечения трех сред (рис. 21) имеем
<rT_BL = (тж_тЬ + аж_вЬ cos в. Отсюда получим
COS0 =
7 А. Д. Полянин, В. Д. Полянин и др.
194 Молекулярная физика и термодинамика
Если cos в > О, то говорят, что жидкость смачивает поверхность.
Если правая часть последнего равенства больше или равна +1, то
на поверхности твердого тела образуется молекулярная пленка жид-
жидкости (полное смачивание жидкостью твердого тела); в сосуде жид-
жидкость образует со стенкой нулевой угол. Если правая часть равенства
меньше или равна —1, то имеет место полное несмачивание.
> Капиллярные явления. Если жидкость смачивает поверхность
тонкого капилляра, то она поднимется по нему на высоту /г, опреде-
определяемую условием механического равновесия.
В случае капилляра круглого сечения радиуса г радиус кривизны
мениска равен R = г/ cos 0, и давление под мениском (см. E2))
должно быть меньше атмосферного на величину 2а JR = 2а cos в/г.
2а cos в
Приравнивая к pan, находим высоту подъема жидкости: h = .
рдг
2.9. Явления переноса в газах
> Средняя длина свободного пробега. Среднее число столкно-
столкновений в единицу времени выделенной молекулы с другими молекулами
газа:
z = na(v)y/2, E3)
где п — концентрация молекул, (v) —средняя скорость движения мо-
молекул, а а — эффективное сечение для упругих соударений молекул.
В модели твердых шариков а = тгс?2, где d — диаметр шарика. Мно-
Множитель у/2 учитывает движение встречных молекул; в качественной
теории явлений переноса его обычно опускают.
Для определения числа столкновений траекторию молекулы, имеющую вид
ломаной линии, окружают цилиндрической поверхностью радиуса d. Движущаяся
молекула столкнется с любой неподвижной молекулой, центр которой окажется
внутри этого цилиндра. За единицу времени молекула проходит расстояние (v),
объем цилиндра равен 7rd2(v), число попавших в него молекул равно z = 7rd2 (v)n.
Полное число соударений между молекулами в единице объема в
единицу времени равно:
1^гМ^д E4)
Средняя длина свободного пробега молекулы равна
А=-^ = -^. E5)
z пау/2
Эффективное сечение некоторого процесса взаимодействия между сталкива-
сталкивающимися частицами (по отношению к выделенному результату этого взаимодей-
взаимодействия) определяют следующим образом. Рассмотрим неподвижную молекулу (ми-
(мишень) и налетающий на нее пучок молекул интенсивности I = nv (интенсивность
2.9. Явления переноса в газах 195
пучка — число частиц, проходящих через единичную площадку, перпендикуляр-
перпендикулярную скорости молекул). Эффективным сечением процесса называют отношение
числа столкновений в единицу времени, приведших к выделенному результату, к
интенсивности пучка:
а = ДАТ//. E6)
Ослабление пучка молекул, распространяющихся в газе, на пути dx равно
где о — сечение упругого рассеяния молекул, ndx — число рассеивающих центров
на пути dx (на единицу площади), Л = 1/(гмт). Интегрируя, получим зависимость
интенсивности пучка от пройденного им расстояния:
I = 10 ехр(-пах) = /0 ехр(-а7/А), E7)
т.е. вероятность того, что молекула испытает соударение на интервале (х, x-\-dx),
равна dl/lo = exp(—x/X)d(x/X). Среднее расстояние, пройденное молекулой до
столкновения, равно
> Качественная модель явлений переноса в газах. Явления
вязкости, теплопроводности и диффузии объясняются переносом
импульса, энергии, концентрации за счет хаотического теплового
движения. Вязкостью называют возникнове-
возникновение силы трения между параллельно движу-
движущимися слоями, если скорости слоев различны.
Если скорость направленного движения и па-
параллельна оси х и меняется только в направле-
направлении оси у (рис. 22), то между слоями жидкости
возникает сила, пропорциональная площади и
градиенту скорости и:
1^1 = ^, E8) ^
«У Рис. 22.
где г] — коэффициент вязкости (или просто вязкость). Возникновение
силы объясняется переносом вдоль оси у импульса рх молекулами,
пересекающими площадку за счет теплового движения.
Если в направлении у меняется не скорость направленного дви-
движения молекул, а температура газа, то поток теплоты в направлении
оси у равен
q = -*^, E9)
где >€ — коэффициент теплопроводности (или просто теплопровод-
теплопроводность) .
Если вдоль оси у меняется концентрация меченых молекул газа п1
(полная концентрация п должна быть постоянной), то поток меченых
196 Молекулярная физика и термодинамика
молекул в направлении оси у (самодиффузия) определяется законом
Фика:
,.-Ь%, F0,
где D — коэффициент диффузии.
Обозначим за д(у) величину, поток которой вдоль оси у нас ин-
интересует. В случае вязкости это — импульс направленного движения
молекул: д(у) — тои(у), в случае теплопроводности — средняя энер-
энергия теплового движения: д(у) = (е) — cvm0T (cv —удельная тепло-
теплоемкость), в случае диффузии: д(у) — п1(у)/п. Будем считать, что
каждая молекула газа переносит через площадку то значение пара-
параметра #, которое имеют (в среднем) молекулы газа в том месте, где
произошло ее последнее соударение. Тогда для потока величины д в
направлении оси у можно получить выражение
Для качественной оценки можно считать, что после соударения молекула ле-
летит в одном из шести направлений, задаваемых осями координат. С расстояния у
прилетят молекулы, испытавшие соударение в цилиндре объемом S dy, полетев-
полетевшие в направлении -у и не испытавшие более соударений на пути у. С учетом
E4), E5), E7) получим g(y)dN= \g(Q) + y*fL\ Щ^ еХр(-^Л (Sdy). Интегри-
L dy j 6X \ А )
руя по у, получим вклад молекул, летящих со стороны положительных у. Вычитая
вклад противоположно летящих молекул, приходим к формуле F1).
> Формулы для коэффициентов переноса.
1. Подставляя д = movx в формулу F1), получим поток импульса,
который равен силе трения E8) для единичной площади. Для вязкости
имеем:
r)=±nmo(v)\= ±p(v)\. F2)
2. Подставляя д — cvm0T в формулу F1) и сравнивая с E9),
находим коэффициент теплопроводности:
ус = ±nmo(v)cv\ - \p(v)cv\. F3)
3. Подставляя д — nl/n в формулу F1) и сравнивая с F0), получим
выражение для коэффициента диффузии:
D=\(v)\. F4)
Из формул F2) — F4) следуют два важных факта:
1) Длина свободного пробега обратно пропорциональна р, что
видно из уравнения E5); поэтому вязкость и теплопроводность газов
не зависят от давления (закон Максвелла). Этот вывод остается вер-
верным до тех пор, пока длина свободного пробега мала по сравнению
с размерами сосуда.
3.1. Электрический заряд. Закон Кулона 197
2) Отношение вязкости и теплопроводности не зависит от темпе-
температуры.
Если длина пробега становится сравнимой с размерами сосуда
(разреженный газ), то вязкость и теплопроводность начинают зави-
зависеть от плотности. Например, при вычислении потока теплоты меж-
между стенками, расположенными на расстоянии d < А (ультраразре-
(ультраразреженный газ), можно считать, что после удара о стенку, имеющую
температуру Tlt каждая молекула приобретает (в среднем) энергию
СуГПцТ!, летит без соударений к противоположной стенке и отда-
отдает ей энергию cvm0(T2 — Тх). Из формулы C5) следует, что число
попадающих на стенку молекул равно ^n^SAt. Отсюда получим:
3. Электродинамика
3.1. Электрический заряд. Закон Кулона
> Электрический заряд — физическая величина, определяющая
интенсивность электромагнитного взаимодействия.
Свойства заряда:
1. Носителями электрического заряда являются заряженные эле-
элементарные частицы— протон и электрон (а также их античасти-
античастицы— антипротон и позитрон — и некоторые нестабильные частицы:
тг-мезоны, /i-мезоны и т.д.). Заряженные частицы взаимодействуют
между собой с силами, убывающими с расстоянием так же медленно,
как гравитационные, но во много раз превышающими их по величине.
2. Все заряженные элементарные частицы обладают одним и тем
же по величине зарядом, который называют элементарным зарядом
и обозначают буквой е. Опыт показывает, что заряд элементарных
частиц не зависит от их скорости.
3. Заряд элементарных частиц может быть положительным или
отрицательным. Одноименные частицы отталкиваются, разноимен-
разноименные— притягиваются. За положительный заряд принят заряд прото-
протона +е. Заряд электрона — отрицательный (—е).
Если в состав макроскопического тела входит различное количе-
количество электронов Ne и протонов Np, то оно оказывается заряженным.
Заряд тела всегда представляется числом, кратным величине элемен-
элементарного заряда: q = e(Np — Ne)..
Закон сохранения электрического заряда: полный заряд замкну-
замкнутой системы, т.е. алгебраическая сумма зарядов всех тел, постоянен.
Это утверждение очевидно, если в системе не происходит превраще-
превращений элементарных частиц. Но закон сохранения заряда имеет более
фундаментальный характер — он выполняется в любых процессах ро-
рождения и уничтожения элементарных частиц.
198 Электродинамика
*> Закон Кулона описывает взаимодействие покоящихся точечных
зарядов, т.е. элементарных частиц или заряженных тел, размеры ко-
которых малы по сравнению с расстоянием между ними. Сила взаимо-
взаимодействия двух точечных зарядов в вакууме (кулоновская сила) прямо
пропорциональна произведению зарядов и обратно пропорциональна
квадрату расстояния между ними:
F = k^-, A)
где к — коэффициент пропорциональности, зависящий от системы
единиц. Сила взаимодействия направлена вдоль прямой, соединяю-
соединяющей заряды; одноименные заряды отталкиваются, разноименные —
притягиваются.
В системе СИ единица заряда кулон (Кл) определяется через
единицу силы тока ампер, а коэффициент в формуле A) равен
к = 9,0 • 109 Н • м2/Кл2, или к = 1/Dте0), где е0 = 8,85 • 102 Ф/м —
электрическая постоянная. В гауссовой системе (СГС) к принимает-
принимается равным единице, и единица заряда определяется законом Кулона.
Сила, действующая на заряд q со стороны нескольких зарядов
Q\) ??2> • • • равняется суперпозиции сил:
? = ?*,-**, *-%. B)
Распределение заряда по пространству задается пространствен-
пространственной плотностью заряда р(г), по поверхности— поверхностной плот-
плотностью заряда сг(г), по линии — линейной плотностью заряда А(г):
dq = pdV, dq~adS, dq = \dl. C)
Система зарядов называется электронейтральной, если ее пол-
полный заряд равен нулю. Простейший пример электронейтральной си-
системы — электрический диполь, состоящий из двух точечных заря-
зарядов, q и —q. Дипольным моментом электрического диполя называется
вектор
p = qf, D)
где I = г+ — г_ —вектор, проведенный от заряда — q к заряду q.
Обобщением на произвольную электронейтральную систему является опреде-
опредегде q = 2J <jj — сумма всех положительных зарядов, г_^ = ^ Qi^i/я — центр
<Zi>0 <Zi>0
положительных зарядов, г_ = Y2 Qi^i/Q — Центр отрицательных зарядов.
4i<0
> О системах единиц в электростатике. Все формулы будут
приводиться в системе СИ. Для перехода к гауссовой системе (СГС)
в большинстве случаев достаточно положить к — 1. Если формула
записана через е0, то надо сначала заменить е0 на 1/DтгАг).
3.3. Электростатическое поле. Принцип суперпозиции 199
3.2. Электрическое поле.
Напряженность поля
> Электромагнитное поле. Взаимодействие заряженных частиц
друг с другом осуществляется посредством электромагнитного по-
поля. Это означает, что: а) заряженные частицы создают в окружаю-
окружающем пространстве электромагнитное поле, б) на заряженную части-
частицу действует электромагнитное поле, существующее в данной точке
пространства в данный момент времени. Поле, создаваемое точеч-
точечным источником, пропорционально его заряду; воздействие поля на
заряженную частицу пропорционально заряду этой частицы.
> Электрическое поле. Электромагнитное поле представляет со-
собой совокупность двух взаимосвязанных полей — электрического и
магнитного. Действие электрического поля на заряженную частицу
не зависит от ее скорости, а действие магнитного поля пропорцио-
пропорционально скорости частицы. Источниками электрического поля служат
любые заряженные частицы, магнитное поле создается движущими-
движущимися зарядами. Соотношение между электрическим и магнитным поля-
полями меняется при переходе в другую инерциальную систему отсчета.
Свойства полей полностью описываются системой четырех уравне-
уравнений Максвелла (см. разд. 3.15). Уравнения Максвелла релятивистски
инвариантны.
> Пробный заряд. Напряженность электрического поля.
Для определения характеристик электромагнитного поля используют
понятие точечного пробного заряда, внесение которого в исследуе-
исследуемое поле его не искажает (т.е. не приводит к смещению источников
поля). Для этого величина пробного заряда должна быть достаточно
малой. Сила, действующая на неподвижный пробный заряд q, пропор-
пропорциональна его величине и определяется только электрическим полем:
?, = «'#. E)
Эта формула определяет напряженность электрического поля. Она
же дает ответ на вопрос, какая сила действует на любой заряд q,
движущийся или неподвижный, со стороны электрического поля.
В СИ напряженность измеряется в Н/Кл или в В/м.
3.3. Электростатическое поле.
Принцип суперпозиции
для напряженности и потенциала
> Электростатическое поле. Стационарное электрическое по-
поле, создаваемое системой неподвижных зарядов, называется электро-
электростатическим полем. Напряженность электростатического поля мо-
может быть определена с помощью закона Кулона B).
200
Электродинамика
1. Поле точечного заряда. Если внести пробный заряд q в поле
точечного заряда Q, то из B) и E) получим:
т^ . О г _ г
где Е (или Ег) — проекция Е на радиальное направление.
2. Поле системы зарядов. Используя принцип суперпозиции по-
полей, имеем:
Ijj" _ ijj" , ijj" , _ V"^ ? Q> г ~r» /^\
1 2 r (f-^J if-^i'
В случае непрерывного распределения заряда суммирование надо
заменить интегрированием, см. C). (Сравните с формулами для поля
тяготения в разд. 1.8.)
Пример 1. Заряд равномерно распределен по дуге окружности радиусом Я
с линейной плотностью Л (рис. 23). Угловой размер дуги равен 2а0. Вычислить
напряженность в центре окружности.
Решение. Напряженность направлена по оси х, проходящей через середину
дуги и центр окружности. Напряженность поля, создаваемого в точке О элемен-
элементом дуги с угловым размером da, равна dE = к dq/H?, где dq = ЛЯ da. Проектируя
на х и интегрируя, находим:
¦Г
XRda
__
2Asina0
Пример 2. Поле отрезка. Заряд равномерно распределен по отрезку
прямой с линейной плотностью Л. Вычислить напряженность поля в точке А,
положение которой по отношению к отрезку задано расстоянием у до прямой и
двумя углами а^ и а2 (рис. 24).
dE,.
Рис. 23.
Рис. 24.
Решение. Вклад в напряженность от элемента dx равен dE = k\dx/r2, его
проекции на оси х и у равны dE cos а и dE sin а. Интегрировать удобно по углу а
после подстановки г = у/ sin а и замены переменной: х = —у ctga, dx = yda/ sin2 a.
Для проекций Ех и Еу получим:
—
У
Ex = к — (sina2 ~
Ey = к—
У
— cosa2)-
Если а1 = 7Г — a2 = а (точка А лежит на перпендикуляре, проведенном через
середину отрезка), то Ех = О, Е = 2k\cosa/y. Если в этом равенстве a —? О
(прямая), то Еу = 2к\/у. Если ах = 0, а2 = тг/2 (полупрямая), то Ех = Еу = кХ/у.
3.3. Электростатическое поле. Принцип суперпозиции 201
> Потенциал электростатического поля. Как и любое стацио-
стационарное центральное поле, электростатическое поле является потен-
потенциальным (см. разд. 1.5). Это означает, что работа поля при пере-
перемещении пробного заряда из одной точки пространства в другую не
зависит от траектории. Сказанное позволяет определить потенциал
электростатического поля ц>(г):
АяA -> 2) = W,(?i) - Wq(f2) = qfrft) - <p(r2)], (8)
где Aq(l —У 2) — работа поля при переносе пробного заряда q
из точки гг в точку г2, Wq(r) = q<p(r) — потенциальная энергия
точечного заряда q во внешнем электростатическом поле (в этой
главе энергия будет обозначаться буквой W). Величина ^(^i) ~" ^(^г)
называется разностью потенциалов между точками г1 и г2. Для
однозначного определения Wq(r) и tp(r) надо выбрать точку, где они
обращаются в нуль. В СИ потенциал измеряется в вольтах (В).
Зная напряженность Е(г), можно вычислить разность потенциа-
потенциалов и потенциал:
<P(?i) - 9(г2) = Г Zdr, , 9{r) = Г fidr, (9)
где г0 — точка, в которой потенциал принят равным нулю. Зная
потенциал <р(г), можно найти проекцию напряженности на любое
направление / (исходя из (9) для двух близких точек):
и вектор напряженности:
> Потенциал поля точечного заряда и системы зарядов.
Потенциал поля точечного заряда Q можно найти с помощью
формулы A0):
r dr dr r2 r
Обычно потенциал принимают равным нулю на бесконечности. В
этом случае:
^>(г) = *Д. A2)
Потенциал поля системы зарядов равен сумме потенциалов полей
отдельных зарядов (принцип суперпозиции для потенциала):
тАт- A3)
202
Электродинамика
Если заряд распределен непрерывно, суммирование надо заменить
интегрированием.
Пример 3. Поле диска. Рассмотрим тонкий диск радиусом R, равномер-
равномерно заряженный с поверхностной плотностью о. Вычислить потенциал в точке А,
расположенной на оси диска на расстоянии х от его центра (рис. 25).
Решение. Вклад в потенциал тонкого коль-
кольца, заключенного между окружностями радиусов
г и г + dr, равен
= к -
dq
= к-
r 2тгг dr
(все точки кольца расположены почти на одина-
одинаковом расстоянии от точки А). Интегрируя, на-
находим потенциал кольца:
Рис. 25.
Затем с помощью A0) определим напряженность (она направлена вдоль х):
V
)
х dx
В пределе R —> оо получим поле бесконечной плоскости: Ех — 2тг ксг — сг/Bе0).
Пример 4. Поле диполя. Требуется найти потенциал и напряженность
электростатического поля вдали от диполя, изображенного на рис. 26.
Решение. Потенциал в точке, задавае-
задаваемой радиусом-вектором г, на большом рас-
расстоянии от диполя (г = \г\ ^> /) равен:
Г2
Г + 5
где 5 = (у • у), р = qf (см. разд. 3.1).
Чтобы найти напряженность, исполь-
зуем тождества: gradj —— 1 = и
\ г6 ) г* г
grad(p • г) = р. В результате имеем:
Отсюда для модуля напряженности получим
Е = kpr~3\/3 cos? в + 1. Такие же выражения
верны для поля любой электронейтральной системы с отличным от нуля диполь-
ным моментом (см.1 разд. 3.1) на большом от нее расстоянии.
> Диполь во внешнем поле. Маленький диполь с дипольным
моментом р = ql во внешнем поле обладает потенциальной энергией
Wn = W>(* + ) - W(r-) = q-jfj-l = -pEt = -{p • Ё).
Эта энергия изменяется как при повороте диполя — на диполь со
стороны поля действует вращательный момент:
= fx
3.4. Теорема Гаусса 203
так и при перемещении диполя в неоднородном поле — на диполь
действует сила:
? = qZ{r+)qZ{r_) = qwl = P=Px +Py +P2 .
Равновесная ориентация с минимальной энергией соответствует по-
положению р || Е, ориентированный таким образом диполь втягивается
в область более сильного электрического поля.
3.4. Теорема Гаусса
> Поток вектора напряженности. Потоком вектора напряжен-
напряженности через маленький плоский участок площадью ds называется
AФ = (Ё-ds) = Ends = E соьв ds, A4)
где ds = nds.n — вектор нормали к плоскости, в — угол между Е и п,
Еп = Есоъв— проекция Е на направление нормали. Знак с(Ф зави-
зависит от выбора направления нормали. Поток вектора напряженности
через поверхность S конечных размеров определяется как
•¦/¦
A5)
В случае замкнутой поверхности направление нормали выбирается в
сторону внешнего пространства.
Аддитивность потока: если электростатическое поле является
суперпозицией двух полей Е(г) — Е\(г) + Е2{гI то для любой
поверхности Ф = Фх + Ф2.
Поток вектора напряженности, создаваемый точечным заря-
зарядом Q, через площадку ds равен
с/Ф = Er cos в ds = ±кЦ- ds± = ±kQ dU,
где ds± — проекция djs на плоскость, перпендикулярную г;
dU — dsL/r2 —телесный угол, под которым площадка видна от заря-
заряда Q] знак «+» соответствует острому углу между п и г, а знак «—»—
тупому углу. Поток через замкнутую поверхность равен 4tt&Q, если
заряд Q находится внутри этой поверхности, и нулю — если снаружи.
> Теорема Гаусса. Поток вектора напряженности электростати-
электростатического поля через замкнутую поверхность выражается через полный
заряд внутри этой поверхности дохв (охватываемый поверхностью):
в=^. A6)
е
204
Электродинамика
Теорема Гаусса и силовые линии. Для графического изображения полей
используют силовые линии (линии напряженности) поля, которые проводятся по
следующим правилам: а) касательная к силовой линии направлена вдоль векто-
вектора Е в каждой точке пространства; б) густота силовых линий пропорциональна
величине напряженности в данной области пространства. Поток вектора напря-
напряженности пропорционален числу силовых линий, пронизывающих поверхность.
(По такому же правилу можно ввести линии любого векторного поля.) Теорема
Гаусса означает, что силовые линии начинаются и заканчиваются на зарядах, а
в пустом пространстве непрерывны. Отметим, что теорема Гаусса и непрерыв-
непрерывность силовых линий являются следствием того, что кулоновская сила убывает с
расстоянием как 1/г2.
Кроме силовых линий, используются также эквипотенциальные поверхно-
поверхности, которые перпендикулярны силовым линиям (работа поля при переносе проб-
пробного заряда вдоль этой поверхности должна быть равна нулю).
> Вычисление напряженности с помощью теоремы Гаусса.
Если соображения симметрии позволяют построить замкнутую по-
поверхность (ее называют гауссовой), на части которой вектор Е пер-
перпендикулярен поверхности и имеет постоянную величину Е, а на
остальной части Е направлен вдоль поверхности (й 1 Я), то с по-
помощью теоремы Гаусса A6) для этой поверхности можно найти Е.
Пример 1. Поле заряженной нити. Найти напряженность поля, создава-
создаваемого бесконечной равномерно заряженной нитью (рис. 27).
Решение. Напряженность в любой точке пространства направлена вдоль
перпендикуляра к нити, а значение Ег зависит только от расстояния г до
нити. В качестве гауссовой поверхности можно выбрать цилиндр радиусом г
и образующей длиной /, ось которого находится
на нити. Записав теорему Гаусса A5), найдем
напряженность:
XI X 2кХ
ill
ттт
Рис. 27.
* Ег =
е0 г 2тгеог г
(сравните с примером 2 из разд. 3.3). Разность
потенциалов двух точек равна
Ч>\ ~ Ч>2 =
2тгеп
Пример 2. Поле заряженной плоскости. Найти напряженность поля, со-
создаваемого бесконечной равномерно заряженной плоскостью (рис. 28).
Решение. Напряженность всюду пер-
перпендикулярна плоскости, а Ех зави-
зависит только от расстояния до плоско-
плоскости. В качестве гауссовой поверхно-
поверхности можно выбрать цилиндр, основа-
основания которого площадью S расположе-
расположены симметрично относительно плоско-
плоскости. Поток через эту поверхность равен
Ex(x)S - Ex(-x)S = 2EXS. Записав тео-
теорему Гаусса, найдем напряженность:
Рис. 28.
(см. пример 3 из разд. 3.3). Приняв v? = О-
при х = О, получим (р(х) = \х\.
2е0
3.4. Теорема Гаусса 205
Пример 3. Поле заряженного шара. Найти поле равномерно заряженного
шара радиусом Я.
Решение. Поле равномерно заряженного шара является центральным. В
качестве гауссовой поверхности можно выбрать сферу радиусом г. Если г > Я, то
внутрь поверхности попадает весь шар (qOXB = g), и мы имеем: Ег Атгг2 = q/e0. Если
г < Я, то qOXB = qr3/R3, и теорема Гаусса принимает вид: Ег • 4тгг2 = qr3/(e0R3).
Окончательно получим:
Ь—- при г > R,
г - г
qr pr
кттг = т— при г < я
(р — плотность заряда). Исходя из формулы для радиальной составляющей
напряженности Ег = —d(p/dr (см. разд. 3.3), находим
{А:— при r>R,
Г qr2 qr2 3 q
_*_ + const = _*_ + _*_ ПрИ г < Я
(константа определяется из условия непрерывности потенциала на поверхности
шара).
> Теорема Ирншоу. С помощью теоремы Гаусса можно убедить-
убедиться в справедливости теоремы Ирншоу, которая утверждает, что то-
точечный заряд в пустой области пространства не может находиться
в состоянии устойчивого равновесия под действием электрических
сил. Действительно, в этом случае напряженность поля остальных
зарядов на маленькой сфере, окружающей заряд, должна быть всюду
направлена внутрь сферы (если рассматриваемый заряд положитель-
положительный), но это противоречит теореме Гаусса (все остальные заряды
находятся вне сферы).
Уравнения Максвелла в электростатике. Условие потенциальности элек-
электростатического поля
-dr = O => rot Й = О
представляет собой одно из уравнений Максвелла (в интегральной и дифферен-
дифференциальной форме) для случая электростатики. Второе уравнение — теорема Гаусса
(для объемного распределения заряда):
/E.ds=— pdV => div?f=—.
?о J ?о
Подставив сюда Е = — grad(?>, получим уравнение Пуассона для потенциала:
div grad (/? = , или Ац> = .
^0 ео
206 Электродинамика
3.5. Электростатика проводников
> Поле в проводнике. Потенциал проводника. Проводником
называется вещество, способное проводить электрический ток (или
тело из такого вещества). Для этого вещество должно содержать сво-
свободные заряды, способные перемещаться до объему проводника. В
электростатике рассматривается состояние, в котором заряды при-
пришли в равновесие (т.е. отсутствует направленное движение зарядов —
электрический ток). Это значит, что всюду в объеме проводника на-
напряженность поля должна быть равна нулю. Отсюда следует, что:
1. Потенциал всех точек проводника имеет одинаковое значение,
которое называют потенциалом проводника.
2. Для поля вне проводника поверхность проводника является
эквипотенциальной. Линии напряженности перпендикулярны поверх-
поверхности проводника.
3. Объемная плотность заряда в проводнике равна нулю (из тео-
теоремы Гаусса следует, что заряд в любом объеме внутри проводника
равен нулю). Не скомпенсированные заряды распределены по поверх-
поверхности проводника.
4. Напряженность поля вблизи поверхности проводника связана с
поверхностной плотностью заряда на этом участке поверхности:
Е=±. A7)
Эту формулу можно получить из теоремы Гаусса A6), если в качестве гауссо-
гауссовой поверхности взять маленький цилиндр, одно основание которого проходит вне
проводника вблизи его поверхности, а другое — внутри проводника: ES = <jS/e§.
> Уединенный проводник. Потенциал уединенного проводника
пропорционален его заряду:
1
где С — электроемкость проводника, зависящая от его формы
и размеров (и от диэлектрической проницаемости среды вокруг
проводника). Электроемкость измеряется в СИ в фарадах (Ф), а» в
СГС — в см. Например, потенциал и электроемкость уединенного
шара радиусом R равны
> Соединение проводников. При соединении проводников с раз-
различными потенциалами проводящей проволокой их потенциалы вы-
выравниваются. Если проводники расположены далеко друг от друга,
то потенциал каждого из них можно рассчитывать как потенциал
3.5. Электростатика проводников
207
уединенного проводника, и закон сохранения заряда позволяет найти
потенциал составного проводника <р':
П Л _J_ П ,Л - Г I I П ' ч ,rl ^1^1 + Ci4>2
(электроемкость проволоки можно считать пренебрежимо малой и ее
заряд не учитывать). Если электроемкость одного из проводников
очень велика, то его потенциал почти не меняется. Например, при
соединении проводника с землей (заземлении) его потенциал стано-
становится равным постоянному потенциалу Земли, который принимают
равным потенциалу на бесконечности (т.е. нулю).
> Проводник во внешнем поле. При внесении любого провод-
проводника во внешнее поле свободные заряды перераспределяются таким
образом, чтобы напряженность результирующего поля (суперпози-
(суперпозиции внешнего поля и поля зарядов проводника) равнялась нулю вну-
внутри проводника. Например, если к незаряженному проводнику подне-
поднести положительный точечный заряд, то на ближней поверхности про-
проводника соберутся отрицательные заряды, а на дальней — положи-
положительные, и заряд с проводником будут притягиваться. (Это явление
называется электростатической индукцией.) Так как распределение
зарядов на проводнике обычно не известно, то расчет по принципу
суперпозиции применить невозможно. В некоторых случаях задачу
удается решить косвенным путем.
Пример 1. Поднесем точечный заряд g > О к поверхности заземленного про-
проводника на расстояние а, малое по сравнению с размерами проводника. В этом
случае конечный проводник можно заме-
заменить бесконечным полупространством из
проводника (рис. 29). Напряженность по-
поля отрицательных зарядов на поверхно*
сти проводника в каждой точке внутри
проводящего полупространства компенси-
компенсирует напряженность, создаваемую в этой
же точке зарядом д. Значит, поле заря-
зарядов проводника точно совпадает (внутри
проводника!) с полем воображаемого за-
заряда (—д), помещенного в ту же точку,
что и заряд q. Последний шаг: поле за-
зарядов проводника вне проводника, сим-
симметричное относительно плоскости полю
внутри проводника, точно совпадает с по-
полем воображаемого заряда (—д), но рас-
расположенного симметрично заряду д. Этот
воображаемый заряд называют «изобра-
«изображением» заряда д, а сам метод— мето-
методом электростатических изображений.
Теперь можно найти: а) силу притяжения
заряда и проводника F = /сд2/BаJ; б) на-
напряженность поля во всем пространстве вне проводника (она равна напряженно-
напряженности двух зарядов +д и — д); в) распределение зарядов на поверхности проводни-
проводника— зная напряженность поля возле поверхности, по формуле A7) можно опре-
определить а.
'ПЛ
"ПЛ
208 Электродинамика
> Принцип единственности. При решении задач с неизвестным
распределением заряда помогает принцип единственностщ который
можно сформулировать следующим образом: существует единствен-
единственное распределение зарядов по поверхности проводников и единствен-
единственное поле Е{г) в пространстве между ними, при котором напряжен-
напряженность поля внутри проводников равна нулю, а потенциалы или заряды
проводников имеют заданные значения. Поэтому, если удалось уга-
угадать такое распределение зарядов или такую конфигурацию поля, при
котором эти условия выполняются, то это решение и будет правиль-
правильным. Например, заметив, что эквипотенциальная поверхность (р = 0
для поля двух зарядов q и — q совпадает с их плоскостью симметрии
(см. рис. 29), можно сделать вывод, что их поле с той стороны от
этой плоскости, где находится заряд </, совпадает с полем заряда q и
проводящей плоскости (см. предыдущий пример).
Пример 2. Проводящий шар в однородном поле. Рассмотрим
проводящий незаряженный шар в однородном поле Ео. Заряды на шаре распре-
распределятся так, чтобы создать внутри шара поле (— Ео). Чтобы подобрать такое
распределение зарядов, рассмотрим два воображаемых шара такого же радиу-
радиуса, но равномерно заряженных по объему,
один — зарядом плотностью р, другой —
плотностью —р. (Поле такого шара бы-
было рассмотрено в примере 3 из разд. 3.4.)
Если центр положительного шара смещен
г, if I i на малое расстояние / по отношению к цен-
0 II -•- I J тру отрицательного (рис. 30), то в обла-
области их пересечения поле равно
-=f pr р(г — I) pi
Рис. 30.
т.е. является однородным. Плотность за-
заряда внутри пересечения шаров равна нулю. Устремим теперь f к нулю, а р к
бесконечности, так чтобы pl/Ce0) = Ео. В итоге получим правильное распреде-
распределение зарядов: а = <т0 cos 0, где <т0 — pi = Зе0Е0, а также найдем поле, создаваемое
зарядами проводящего шара вне шара: оно совпадает с полем точечного диполя
с дипольным моментом р = (рУI = 4тгео.К3 Ш q (см. пример 4 из разд. 3.3).
3.6. Электростатика диэлектриков
> Поляризация диэлектрика. Поляризованность. Диэлектри-
Диэлектриком называют вещество, которое не проводит электрический ток.
Значит, в этом веществе отсутствуют свободные заряды (или их ни-
ничтожно мало). Тем не менее, в присутствии диэлектрика происходит
ослабление электрического поля. Это свидетельствует о том, что при
помещении диэлектрика в электрическое поле в объеме и на поверх-
поверхности появляются макроскопические заряды. Указанные заряды воз-
возникают в результате поляризации диэлектрика — смещении связан-
связанных зарядов отдельных молекул или кристаллической решетки друг
3.6. Электростатика диэлектриков
209
относительно друга. При поляризации средний дипольный момент
молекул становится отличным от нуля, и возникает дипольный мо-
момент объема диэлектрика. Степень поляризации в данной точке ди-
диэлектрика характеризуют поляризованностъю ?, определяемой как
суммарный дипольный момент молекул в расчете на единицу объема:
где п — концентрация молекул. Для построения макроскопиче-
макроскопических уравнений поля в диэлектрике можно упрощенно считать, что
все молекулы в объеме AV имеют одинаковый дипольный момент
(Р) = Р/п = до(Г).
> Поляризованность и связанные заряды. Механизм образова-
образования макроскопических связанных зарядов проще всего представить
в случае однородной поляризации (Р = const). В этом случае объем
диэлектрика остается электронейтральным, а на его поверхности вы-
выступают заряды — на передней (по отношению к Р) положительные,
на задней — отрицательные. Создаваемая ими напряженность будет
направлена против поляризованности Р.
При поляризации через произвольную площадку As в объеме ди-
диэлектрика (включая его границу) в направлении нормали к поверхно-
поверхности проходит заряд
Aq = n{As(l) cos 9)qQ = PnAs = {? -As),
A8)
где As( I) cos в — объем тонкого цилиндрического слоя, молекулы ко-
которого при поляризации пересекают площадку (рис. 31). Проинтегри-
Проинтегрировав по любой замкнутой поверхности, найдем полный связанный
заряд, вышедший из охватываемого ею объ-
объема, что означает появление внутри объема
связанного заряда
? = ~
или
div P = -
A9)
Здесь ds = nds направлен, как обычно, в
сторону внешнего пространства. Для поверх-
поверхностной плотности связанного заряда из A8)
получим:
<тсв = Рп. B0)
As = nAs
Рис.31.
> Электрическое смещение. Макроскопическая напряженность
электрического поля в диэлектрике определяется как результат
210 Электродинамика
усреднения микроскопической напряженности Е (сильно меняющей-
меняющейся на межатомных расстояниях) по малому объему, содержащему до-
достаточно много молекул: Е (г) = (Еыикро). Напряженность поля опре-
определяется как связанными, так и сторонними, нанесенными на диэлек-
диэлектрик извне, зарядами:
•<*?= 7-(<гЕв + С)- B1)
Так как распределение связанных зарядов заранее не известно,
удобно ввести новую величину, которую называют электрическим
смещением:
D=e0E+? {D=E + 4n? в СГС). B2)
Из уравнений A9), B1) следует, что электрическое смещение опреде-
определяется только сторонними зарядами:
¦ ds =
СГс) B3)
(теорема Гаусса для электрического смещения). В дифференциаль-
дифференциальной форме это уравнение имеет вид
divZ? = /?CT (div D = 4тг/>ст в СГС).
> Изотропный диэлектрик. Поляризованность Р в данной точ-
точке диэлектрика возникает под воздействием электрического поля и
определяется его напряженностью ?. В не очень сильных полях Р
зависит от Е линейно, а в изотропном диэлектрике^ кроме того,
Р II Е:
Р=еохЁ (? = х2? в СГС), B4)
где к—диэлектрическая восприимчивость вещества. Для электри-
электрического смещения в однородном диэлектрике получим:
D^Sqs'E ф^е'Ё в СГС), B5)
где ?=l-fx(? = l-l- 4тгх в СГС) — диэлектрическая проницаемость
вещества.
^ Условия на границе раздела диэлектриков. На границе раз-
раздела двух диэлектриков выполняются следующие условия для танген-
тангенциальных (касательных) и нормальных компонент:
ElT = E2T, D2n-Dln = a", Р2п - Р1п - -<тс» B6)
(нормаль п проведена из первой среды во вторую). Если стороннего
заряда на границе нет, то нормальные компоненты смещения равны
3.6. Электростатика диэлектриков 211
друг другу. Первое условие получается из условия потенциальности
поля Е (работа по замкнутому контуру равна нулю), второе — из
формулы B3). В случае изотропного диэлектрика имеем:
Е1т = Е2т, е.Е.^е.Е^ Dln = D2n, ^ = ^. B7)
Видно, что на границе диэлектрических сред происходит преломление
линий напряженности.
> Вычисление полей в присутствии диэлектриков. Уравнения
для Е и D вместе с условием связи между ними в данном веще-
веществе B5) и граничными условиями B7) однозначно определяют поле
во всем пространстве по известному расположению сторонних заря-
зарядов. Отметим некоторые свойства решения:
1. Из уравнений A9) и B3) и формулы Р = D, которая
является следствием B4) и B5), для однородного диэлектрика полу-
получим
Рсв = -^VT. B8)
Значит, в отсутствие стороннего объемного заряда в результате по-
поляризации будет возникать только поверхностный связанный заряд.
(Если диэлектрик неоднородный, т.е. е зависит от координат, то объ-
объемный связанный заряд возникает и в отсутствие объемного сторон-
стороннего заряда.)
2. Если границы однородного диэлектрика совпадают с эквипо-
эквипотенциальными поверхностями того поля EQ, которое создают сто-
сторонние заряды в отсутствие диэлектрика, то все граничные условия
удовлетворяются, если положить
B9)
Пример 1. Если точечный заряд q окружить сферическим слоем из диэлек-
диэлектрика (внутренний радиус Hj, внешний — R2), то вне диэлектрика напряженность
поля не изменится, а внутри
4тге0е г2 е 4тгг2
е 4тгЯ2 '
?-1
Связанные заряды на поверхностях равны друг другу: q2B = — §iB = q
Пример 2. Рассмотрим шар из однородного диэлектрика, равномерно за-
заряженный сторонним зарядом с объемной плотностью р. Напряженность поля в
212 Электродинамика
отсутствие диэлектрика определена в примере 3 из разд. 3.4. В присутствии ди-
диэлектрика напряженность при г < R уменьшится в е раз:
Нетрудно проверить, что <jCB4irR2 = — рсь -|-7гК3, т.е. полный связанный заряд,
как и должно быть, равен нулю.
Пример 3. Если в однородное поле Шо перпендикулярно напряженности
поместить пластину диэлектрика, у которого е меняется от ?j на одном конце
до е2 на другом, то получим
D = ео.Ео = const, #=—гт, P = D , рсв = -—- = - — —,
ев _ p
^2 = f2 =
Легко проверить, что полный связанный заряд равен нулю.
Пример 4. Если в однородное поле Е 0 внести шар из однородного диэлек-
диэлектрика, то он поляризуется однородно ( г = const). Действительно, равномерная
поляризация соответствует сдвигу двух равномерно заряженных шаров из при-
примера 2 в разд. 3.5; как было показано, при этом возникает однородное поле с
напряженностью Е\ = —3e0pl = —3eo(ql/V) = —Зе0 Р . Полное поле при этом рав-
равно Е = Ео + Е 1 = Ео — Зе0 Р. Из этого уравнения и условия Р = (е — 1)е0 Е
находим
е + 2' е + 2 °'
При этом выполняются все граничные условия.
> Механизмы поляризации. Различают три механизма поляри-
поляризации диэлектриков.
1. Ориентационный механизм поляризации полярных диэлектри-
диэлектриков. Молекулы полярного диэлектрика (полярные молекулы) облада-
обладают постоянным дипольным моментом р0 в отсутствие поля (Н20,
НС1 и др.). Вследствие теплового движения, в отсутствие поля все
направления дипольного момента равноправны, и средний дипольный
момент равен нулю. Внешнее поле стремится установить дипольные
моменты молекул вдоль Е (см. разд. 3.3). В результате конкурен-
конкуренции ориентирующего действия поля и теплового движения возникает
средний дипольный момент (р)) который в слабом поле (р0Е <^ кТ)
пропорционален Е и убывает с ростом температуры.
В газообразных диэлектриках, в соответствии с распределением Больцмана
(W \
~ ) > гДе
Wn = — (р • Е). Видно, что во внешнем поле средний дипольный момент должен
быть направлен вдоль Е и пропорционален ро/( —-— 1, где f(x) — некоторая
функция, равная нулю при х = 0 и единице при х —> оо (сильное поле, все диполи
3.-6. Электростатика диэлектриков 213
2
почти параллельны). При малых х (слабое поле) f(x) « 7^, (р) ^ 7—~ Е —
средний дипольный момент пропорционален Е и обратно пропорционален Т.
Расчет дает для 7 значение 1/3, т.е. Р = — Е. Поэтому для диэлектрической
проницаемости получим
[формула Дебая —Ланжевена).
2. Электронный (деформационный) механизм поляризации непо-
неполярных диэлектриков. В отсутствие внешнего поля дипольный мо-
момент неполярной молекулы равен нулю (Н2, 02, N2 и т.д.), т.е. наи-
наименьшей потенциальной энергией обладает такое состояние молеку-
молекулы, при котором центр отрицательного заряда (электронного обла-
облака) совпадает с центром положительного. При включении внешнего
поля центры положительного и отрицательного зарядов смещаются,
и возникает сила, стремящаяся вернуть их в положение равновесия;
при малом смещении I эта сила пропорциональна /: F = —/?/ (квази-
(квазиупругая сила). В положении равновесия qE = /31, т.е. возникающий
под действием поля (индуцированный) дипольный момент р = qol ока-
оказывается пропорциональным напряженности поля: р — ае0Е. Опре-
Определенный таким образом коэффициент а называют поляризуемостью
молекулы. Поляризуемость диэлектрика равна Р = пр = пеоаЕ, где
Е — поле, действующее на одну молекулу. В газах это поле можно
считать равньш среднему полю в диэлектрике, и для диэлектрической
проницаемости получим:
? = 1 + х=1 + an.
В плотных газах и жидкостях надо учитывать отличие поля, действу-
действующего на молекулу, от среднего поля в диэлектрике (второе включает
в себя поле самой молекулы, а первое — нет).
3. Ионная поляризация в твердых диэлектриках, обладающих
кристаллической решеткой. Под действием поля подрешетка поло-
положительных ионов смещается целиком в одну сторону, подрешетка
отрицательных ионов — в другую.
> Сегнетоэлектриками называют вещества (например, сегнето-
ву соль), в которых ниже температуры Тс, называемой температу-
температурой Кюри, небольшие области — домены — спонтанно поляризова-
поляризованы до насыщения (все диполи ориентированы параллельно). Сегнето-
электрики по своим свойствам являются электрическими аналогами
ферромагнетиков: они имеют аномально большую диэлектрическую
проницаемость, зависящую от ? и Г, проявляют при поляризации
гистерезисные свойства, превращаются в обычные диэлектрики при
нагревании выше температуры Кюри (подробнее см. разд. 3.13).
214 Электродинамика
3.7. Конденсаторы
> Электроемкость конденсатора. Конденсатором называется
система из двух изолированных друг от друга проводников, один
из которых заряжен зарядом +д, другой — зарядом —q. Проводники
называют обкладками конденсатора, заряд q — зарядом конденса-
конденсатора, разность потенциалов между положительной и отрицательной
обкладками U — напряжением на конденсаторе. Напряжение на кон-
конденсаторе пропорционально его заряду:
я = ^и, (зо)
где С — электроемкость (или просто емкость) конденсатора (изме-
(измеряется в фарадах).
> Простые конденсаторы. Конденсатор называют простым,
если: а) электрическое поле сосредоточено в ограниченной области
пространства между его обкладками (т.е. можно считать, что все
силовые линии начинаются на положительной обкладке и заканчива-
заканчиваются на отрицательной); б) все пространство, в котором сосредото-
сосредоточено поле, заполнено однородным диэлектриком.
Пример 1. Плоский конденсатор. Конденсатор называется плоским, если
его обкладками служат две параллельные пластины площадью 5, расстояние меж-
между которыми мало по сравнению с их размерами (d <C y/S). Поле между пластинами
можно считать однородным всюду, кроме самых краев. Напряженность поля най-
найдем с помощью формулы A7): Е = q/(eoeS). Напряжение на конденсаторе U = Ed,
а его емкость равна
с = *?. CD
Пример 2. Сферический конденсатор. Конденсатор называется сфери-
сферическим, если его обкладками служат две концентрические сферы радиусов /^
и Я2. Напряженность поля между обкладками: Е = —, где г — расстояние
Атгеегг
до центра. Напряжение вычисляется по формуле U = JR 2 E(r) dr, а емкость равна
4тге0еД1Д2
R2-Rx '
При R2 —Юо это выражение переходит в емкость уединенной сферы (см. разд. 3.5).
Пример 3. Цилиндрический конденсатор. Конденсатор называется
цилиндрическим, если его обкладками служат два концентрических цилиндра
радиусов R1 и R2 и длиной / ^> R2 — Дх. Напряженность между обкладками равна
Е = . Напряжение вычисляется по формуле U = [ 2 E(r) dr, а емкость
2ireoerl J Ri
равна
2тгепе1
С =
\n(R2/R1)
3.8. Энергия электростатического поля 215
*> Составные конденсаторы. Соединяя обкладки простых кон-
конденсаторов, получим составной конденсатор. Емкость составного
конденсатора определяется формулой C0) и выражается через емко-
- сти его компонентов.
|L г Г *• параллельное соединение. Все об-
Г 1 1 ,/ |l_ кладки соединены между собой и обра-
[ || j ^'-^ ц"-ц зуют обкладки составного конденсатора
Q\ q $) (рис. 32, а). В этом случае имеем
Рис-32- U = Uit ? = $>, С = ? С,-.
2. Последовательное соединение. Обкладками составного кон-
конденсатора служат обкладки крайних конденсаторов (рис. 32, б), пол-
полный заряд на каждой паре внутренних обкладок равен нулю. Имеем
3. Во многих случаях можно рассчитать емкость составного кон-
конденсатора, шаг за шагом заменяя последовательно и параллельно со-
соединенные конденсаторы на эквивалентную емкость. Если же схе-
схему нельзя свести к параллельным — последовательным элементам, то
можно воспользоваться методом узловых потенциалов.
Пример 4. Рассмотрим схему на рис. 33.
Примем ipA = 0, тогда ц>в = U. Потенциалы ^\
и с/?2 найдем из системы уравнений, выражающих
условие электронейтральности в узлах 1 и 2 (пол-
(полный заряд трех обкладок, подходящих к каждому
узлу, должен быть равен нулю):
(Vl - U)CS + (Vl - ч>2)Съ + (filC1 = О,
cy ¦ 'с,
I
в
,С4
2
Решив уравнения, найдем заряд составного кон-
денсатора q = C1ipl + С2с/?2 и емкость С = <?/?/. Рис. 33.
3.8. Энергия электростатического поля
> Энергия системы зарядов. Энергия взаимодействия системы
зарядов определяется как работа внешних сил, необходимая для
создания этой системы, или как работа, совершаемая силами поля
при ее уничтожении. Энергия взаимодействия двух точечных зарядов
равна энергии одноро заряда в поле, создаваемом другим зарядом:
Энергия взаимодействия системы точечных зарядов равна
C2)
216 Электродинамика
Здесь <р{г{) — потенциал, создаваемый всеми остальными зарядами
в той точке, где находится г-й заряд. Если переписать эту формулу
для заряда, непрерывно распределенного по поверхности или объему
в ограниченной области пространства, то получим!
W = | / p(r>(F) dV + | / <р(?)<т(г) ds. C3)
* J * J
V S
Хотя формула C3) получена формальным обобщением C2), между ними
есть принципиальные различия. В формуле C2) </?(rt) — потенциал, создаваемый
остальными зарядами, а в C3) </?(г) — потенциал всех зарядов в точке г (вклад
элемента объема или поверхности при уменьшении размеров стремится к нулю).
Но самое главное — C2) учитывает только энергию взаимодействия, после
разнесения точечных зарядов далеко друг от друга остается собственное поле
каждого заряда; формула C3) позволяет вычислить полную энергию системы
непрерывно распределенных зарядов (при разделении системы на всё более мелкие
части энергия стремится к нулю).
Пример 1. Вычислить энергию равномерно заряженного шара радиусом R.
Решение. Подставляя в C3) потенциал поля шара (см. пример 3 из разд. 3.4),
получим
5 R
> Энергия уединенного проводника. Все заряды на проводнике
находятся при одинаковом потенциале, равном потенциалу проводни-
проводника. Из формулы C3) имеем
W = ~Т = ~2~ = ~2С' C4)
где С — электроемкость проводника (см. разд. 3.5). Это вы-
выражение получается и прямым расчетом работы электрического
поля при постепенном удалении всего заряда на бесконечность:
ч>
W — fvfydq = Cf<pd<p = yCV2. Например, энергия уединенной
о
проводящей сферы равна
где е — диэлектрическая проницаемость среды вокруг сферы.
> Энергия конденсатора. Из формулы C3) получим
w= =
2 2 2 - 2 - 2С '
Поле в конденсаторе можно уничтожить, перенося заряд малыми пор-
и
циями с одной обкладки на другую: W = f U(q) dq = C Jr U dll— \CU2.
о
Например, энергия плоского конденсатора равна
w = *иг{EdJ = ^Sd- C6)
3.8. Энергия электростатического поля 217
^ Плотность энергии электрического поля. При полевом под-
подходе надо говорить не об энергии взаимодействующих зарядов, а об
энергии окружающего их электрического поля. Объемная плотность
энергии электрического поля w = W/V в пустом пространстве зави-
зависит только от напряженности поля:
w = \е0Е\ C7)
Это выражение верно для любого распределения зарядов (его можно
получить, рассмотрев однородное поле плоского конденсатора).
Исходя из уравнений поля (см. разд. 3.4), формулу C3) можно
преобразовать к виду
' ,E2dV, C8)
где интегрирование ведется по всему пространству.
Например, при вычислении энергии заряженного шара (пример 1) по форму-
формуле C3) интегрирование производилось по объему шара, однако C8) показывает,
что только часть энергии поля заключена внутри шара, а часть — в окружаю-
окружающем шар пустом пространстве. Формулы C3) и C8) позволяют вычислить пол-
полную энергию поля во всем пространстве только если: а) отсутствуют точечные
заряды и заряды, распределенные по линии; б) заряды распределены по конечной
области пространства. Однако C8) позволяет вычислять энергию, сосредоточен-
сосредоточенную в конечной области пространства, даже если полная энергия бесконечна.
В случае диэлектрика плотность энергии оказывается в е раз
больше:
w = ±е0еЕ2 = \ED = \eQE2 + \eQ{e - l)E2. C9)
Первый член в последнем выражении представляет собой непосред-
непосредственно энергию электрического поля в диэлектрике, а второй (рав-
(равный \Е • Р) —работу, совершаемую полем над молекулами при
его включении. Это выражение можно обобщить на случай, когда Р
(и D) не пропорциональны Е (сегнетоэлектрики, сильные поля). Для
этого надо рассмотреть зарядку плоского конденсатора, заполненно-
заполненного таким диэлектриком:
V ~ \
> Закон сохранения энергии и вычисление сил. Для вычисле-
вычисления сил, действующих на заряженное или поляризованное тело в элек-
электрическом поле, надо рассмотреть медленное изотермическое изме-
изменение его положения. При этом работа внешних сил плюс работа ис-
источников равна изменению энергии поля. Так как тело находится в
механическом равновесии, то работа внешних сил равна работе силы,
действующей со стороны поля, с обратным знаком.
218
Электродинамика
Пример 2. Рассмотрим плоский конденсатор (отключенный от источника),
который заполнен жидким или газообразным диэлектриком. Требуется найти
силу, действующую на обкладку конденсатора.
Решение. При увеличении расстояния между обкладками на dx энергия
увеличится на — EDSdx, а работа равна F dx. Значит, сила притяжения равна
F = y^D S — \Eq, гДе \^>— напряженность в диэлектрике, создаваемая одной
обкладкой. Если диэлектрик представляет собой твердую пластину, то между
диэлектриком и обкладкой существует воздушный промежуток, изменение энер-
энергии равно yeo.E2Sckr, а сила F = уе0Е25 = у<??0, где у#0 — напряженность,
создаваемая одной пластиной в воздушном промежутке.
Пример 3. Вычислить силу, которая втягивает пластину из диэлектрика в
пространство между обкладками плоского конденсатора.
Решение. Будем считать, что размеры пластины совпа-
совпадают с размерами обкладок, а толщина пластины чуть мень-
меньше, чем расстояние между ними 6. Будем также считать,
что конденсатор подключен к источнику, который поддер-
поддерживает на нем постоянное напряжение U. Уменьшим на dx
расстояние, на которое пластина вдвинута в конденсатор
(рис. 34). Энергия поля в объеме dV = abdx изменится
на dW = {^eQE2 — ye0ei?2)abckr (a — ширина пластины,
Е = U/d— напряженность поля), заряд на пластинах изменится
на dq = Ааа dx = (е0 E—eQ eE)a dx, работа источника &АИСТ = U dq
в два раза больше изменения энергии поля. Записав закон сохра-
сохранения энергии F dx + 8AacT — dW, получим F — y?o(e~ 1)аЬЕ2.
Заметим, что нам удалось вычислить силу, возникающую вслед-
вследствие искривления поля у краев конденсатора, хотя расчет энер-
энергии производился без учета краевых эффектов.
Рис. 34.
3.9. Постоянный ток
> Сила тока. Плотность тока. Электрическим током называ-
называется упорядоченное движение электрических зарядов. Конвекцион-
Конвекционным током называют движение зарядов, связанное с перемещением
в пространстве заряженного тела. Ток проводимости в веществе осу-
осуществляется свободными зарядами (носителями тока)—электрона-
тока)—электронами в металлах, электронами и дырками в полупроводниках, ионами
в электролитах. За направление тока" принимается направление дви-
движения положительных зарядов. Заряд, проходящий за время dt через
площадку ds = nds внутри проводника в направлении нормали п,
определяется средней скоростью свободных зарядов {у):
dq — qon(v)' dsdt = j • sdt, D0)
где #0 —заряд носителей тока, п — их концентрация, а j = qon(v) —
плотность тока. Силой тока I называется заряд, проходящий через
сечение проводника в единицу времени:
dq = Idt
= dt fjds,
D1)
где интегрирование производится по поперечному сечению. Для
линейного (S = const) проводника j = const, и D1) приобретает вид:
/ = jS. Ток называется постоянным, если / = const.
3.9. Постоянный ток 219
Уменьшение заряда внутри замкнутой поверхности равно dqOX3 = —dt ? j • ds.
В дифференциальной форме закон сохранения заряда принимает вид: ¦—?- = — div J.
В случае постоянного тока ? j ¦ ds = 0 (div J = 0), т.е. линии тока непрерывны и
идут вдоль проводника.
*> Закон Ома в дифференциальной форме. Для поддержания
тока в веществе на свободные заряды должна действовать постоян-
постоянная сила F электромагнитной природы, которую можно характери-
характеризовать напряженностью Е = F /q0. Как только эта сила исчезает,
за ничтожно малое время средняя скорость свободных зарядов обра-
обращается в нуль. При не очень больших значениях Е плотность тока в
изотропном проводнике должна быть пропорциональна Е:
] = <r% = j$, D2)
где а — удельная проводимость вещества, р — удельное сопроти-
сопротивление. Из закона сохранения заряда следует, что если р = const, то
§ Е • ds — р § j - ds — О (div E — 0), т.е. в однородном проводнике
линии напряженности непрерывны, а в проводе постоянного сечения
они параллельны поверхности провода.
> Закон Джоуля — Ленца в дифференциальной форме. При
протекании тока по проводнику работа, совершенная полем Е над
свободными зарядами, полностью переходит в энергию теплового
движения при их соударениях с ионами. Объемная плотность тепло-
тепловой мощности тока равна работе поля над зарядами в единице объема
за единицу времени:
^тепл = n(v)-? = qon(v) -^=j-^ = crE2= pj2. D3)
> Однородный участок цепи. Сопротивление. Если на участ-
участки цепи протекание тока обеспечивается только электростатическим
(кулоновским) полем (т.е. pj = Екул), то участок цепи называется од-
однородным. В однородном (р = const) проводнике § Е ds = р § j-ds = Q,
и в соответствии с теоремой Гаусса (см. разд. 3.4) заряд, создаю-
создающий поле, расположен только на поверхности. В проводе постоянного
сечения эквипотенциальные поверхности совпадают с поперечными
сечениями провода. Сила тока, протекающего в направлении от се-
сечения 1 к сечению 2, пропорциональна разности потенциалов ф± — <р2
(закон Ома для однородного участка цепи):
2
Если / < 0, то ток протекает от 2 к 1. Здесь R — J(p/S) dl — со-
1
противление проводника, измеряется в омах (Ом). Для однородно-
однородного линейного проводника R = pl/S. Удельное сопротивление зависит
220 Электродинамика
от температуры; в широких пределах можно пользоваться линейной
зависимостью р — роA + at), где р0 —удельное сопротивление при
0°С, а — температурный коэффициент сопротивления. Для метал-
металлов а « 1/273 (т.е. р ~ Г), для полупроводников а < 0.
> Сторонние силы. ЭДС. Хотя на отдельном участке цепи ток
может поддерживаться электростатическими силами, полная рабо-
работа этих сил в замкнутой цепи равна нулю. Значит, для компенса-
, + ции тепловых потерь в цепи долж-
Н — 2 1 - | 2 ны действовать сторонние силы не-
' ' I электростатической природы, пол-
^12 =~<$ - ^12= ^ ная работа которых отлична от ну-
Рис 35 ля> те- Должны присутствовать ис-
источники тока (рис. 35). Эти силы
имеют электромагнитную природу: i^TOp = <7о^стоР> и их работа по
переносу пробного заряда q пропорциональна q:
Aq(l-+2) = q[ ?стор • dl = q$u = ±#, D5)
J 1
где % называют электродвижущей силой источника (ЭДС), знак «+»
соответствует случаю, когда источник проходится в направлении
действия сторонних сил (от отрицательной обкладки к положитель-
положительной), знак «—» —противоположному случаю. Мощность сторонних
сил (мощность источника) равна
(работа сторонних сил над всеми зарядами проводника за время dt
равна работе по переносу заряда I dt с одного конца проводника на
другой).
> Закон Ома для неоднородного участка цепи. На неоднород-
неоднородном участке цепи действуют как электростатические, так и сторон-
сторонние силы. Дифференциальный закон Ома D2) принимает вид
1
D7)
а закон Ома для участка цепи записывается так:
Если / < 0, то ток протекает от 2 к 1. Величину U12 = (v?i — ^2)
равную работе полной силы по переносу единичного заряда между
сечениями 1 и 2, называют напряжением на участке цепи; для
однородного участка напряжение равно разности потенциалов. Закон
Ома утверждает, что на любом участке цепи IR = Un.
3.9. Постоянный ток 221
^ Закон Джоуля — Ленца для участка цепи. Тепловую мощ-
мощность тока на участке цепи можно найти с помощью формулы D3):
' = j\j2Sdl = I2j\f = I2R- D9)
p- Закон Ома для неразветвленной цепи. В неразветвленной
замкнутой цепи / = const; сложив уравнения D8) для всех участков
цепи, получим:
В случае источника с внутренним сопротивлением г, замкнутого на
внешнее сопротивление R, имеем: / = ЗГ/(Я+г); разность потенциалов
на клеммах источника равна <р+ — <р_ = IR — % — /г, ток короткого
замыкания источника (R = 0) равен /к 3 = 8Г/г. Закон Ома E0) выра-
выражает закон сохранения энергии для неразветвленной цепи: мощность
сторонних сил равна мощности тепловых потерь на сопротивлениях
цепи.
Полезная мощность источника тока. Если источник служит для пере-
передачи энергии во внешнюю цепь, то полная (затраченная) мощность равна мощ-
мощности сторонних сил: Рподн — <?/, потерянная мощность — тепловым потерям
на внутреннем сопротивлении: Рпотер = 12г. Для полезной мощности получим:
Рполезн = %1 — 12г = /Д(/?, где Д(/? — разность потенциалов на клеммах источника,
Рполезн максимальна при I = $/Bг).
Если на участок цепи подается разность потенциалов (/?j — tp2 и на
участке включено устройство, совершающее работу против внешних сил
(мотор), то полная мощность: Рполн = (ч>\ — V^K* потерянная мощность:
Рпот = I2R (R — сопротивление обмотки мотора), полезная мощность:
^полезн = (v^i ~- 4>2)I~I2R— —*$wl — ^l• Величины ^ и / зависят от скорости вра-
вращения ротора мотора; максимальная РПОлезн достигается при / = (ip1 — ср2)/BЯ).
> Расчет разветвленной цепи. Правила Кирхгофа. Для нахо-
нахождения токов в различных участках разветвленной цепи надо произ-
произвольным образом обозначить неизвестные токи и придать им произ-
произвольные направления, после чего воспользоваться одним из следую-
следующих методов:
1. Метод узловых потенциалов. В качестве неизвестных прини-
принимают потенциалы узлов цепи (один из потенциалов принимают рав-
равным нулю). С помощью D8) выражают токи через потенциалы, затем
для N — 1 узла записывают закон сохранения заряда: ]Г} /г- = 0 (алге-
(алгебраическая сумма токов, сходящихся в узле, равна нулю). Найдя <р{1
из D8) находим токи.
2. Правила Кирхгофа. В этом методе неизвестными являются сами
токи. Сначала записывают для N — 1 узла уравнения ^/г- =0 (пер-
(первое правило Кирхгофа). Затем выбирают произвольный замкнутый
контур, обходят его в произвольном направлении и, суммируя D8)
для каждого участка, получают уравнение ^/,-Д,- = Yl^ij (BTOPoe
правило Кирхгофа). Повторяя эту процедуру необходимое число раз,
получают систему уравнений для токов.
222 Электродинамика
> Эквивалентные сопротивления и источники. Несколько со-
соединенных между собой сопротивлений Ri можно заменить одним
эквивалентным сопротивлением R.
1) Последовательно соединенные сопротивления: R = ^ R{.
2) Параллельно соединенные сопротивления: R~l = X^-ftf1-
3) В общем случае для вычисления эквивалентного сопротивления
надо использовать методы расчета разветвленных цепей.
Несколько соединенных источников с параметрами ^, г{ можно
заменить одним эквивалентным источником с параметрами $, г.
1) Последовательное соединение: $ = ХЖ> r — Ylri-
2) Параллельное соединение: % = Х^^ггГ1/Х^гГ1) r~1 = ]Cr»rl-
3) В общем случае для вычисления эквивалентных f и г надо
использовать методы расчета разветвленных цепей.
> Классическая электронная теория металлов. Проводимость
металлов осуществляется обобществленными валентными электрона-
электронами. В классической электронной теории Друде — Лоренца газ элек-
электронов считается классическим газом, концентрация которого равна
концентрации атомов металла, а температура — температуре метал-
металла. Ток проводимости рассчитывается в предположении, что электро-
электроны приобретают скорость упорядоченного движения при свободном
движении и полностью теряют ее при каждом столкновении. Кроме
того, предполагается, что \{v)\ <^ (v) ~ кТ. Средняя скорость упоря-
упорядоченного движения равна (v) ~ ат/2 = е Ет/Bте), где среднее время
между столкновениями г выражается через среднюю длину свобод-
свободного пробега и среднюю скорость теплового движения: т = A/ (v). С
учетом D0) получим:
e2n\ -> 2mAv)
Е е\7
-? /-V e2n\ ->
j = en(v) = -——Е, т.е. р=
2m(v)
Е, т.е. р= \
2me(v) e2n\
(при более тщательном анализе получается такой же ответ, но без
двойки в числителе; однако для оценочной модели это несущест-
несущественно) .
Обсуждение результатов классической электронной теории.
1. Теория объясняет рост р при повышении температуры, но предсказывает
зависимость р ~ л/Т, а наблюдается р ~ Т.
2. Теория успешно объясняет закон Видемана — Франца: для всех металлов
произведение коэффициента теплопроводности >с (см. разд. 2.9) и удельного
сопротивления пропорционально Т (произведение хр содержит только {уJ).
3. Длина свободного пробега электронов, вычисленная из формул классиче-
классической электронной теории, оказывается на несколько порядков больше межатомно-
межатомного расстояния, что противоречит основным представлениям теории.
4. Классическая электронная теория предсказывает электронный вклад в
молярную теплоемкость -§-ЯТ (см. разд. 2.5). Экспериментально вклад электронов
в теплоемкость оказывается ничтожно малым.
3.10. Магнитное поле. Сила Лоренца и закон Ампера 223
3.10. Магнитное поле. Сила Лоренца
и закон Ампера
^ Магнитная индукция. Сила Лоренца. Магнитное поле — од-
одна из двух составляющих электромагнитного поля (см. разд. 3.2).
Магнитное поле действует на движущиеся частицы, токи и магнит-
магнитные моменты. Источниками магнитного поля являются движущие-
движущиеся частицы, токи, магнитные моменты и переменные электрические
поля. Характеристикой магнитного поля является вектор магнитной
индукции В . Для определения В можно использовать выражение для
силы, действующей на заряженную частицу в электромагнитном по-
поле:
vxB ($ = q(l<; + -vxB) в СГС), E1)
с
с
где с « 3 • 1010 см/с — электродинамическая постоянная, равная
скорости света в вакууме. Силу Fn = qvxB, действующую на частицу
со стороны магнитного поля, называют силой Лоренца.
Для определения магнитной индукции В с помощью формулы E1) надо:
1) измерить силу, действующую на неподвижную частицу, чтобы отделить
действие электрического поля;
2) найти направление скорости tT, для которого при постоянной v величина
магнитной силы максимальна;
3) по величине силы найти модуль магнитной индукции: В = Fm^x/(qv)\
4) по направлению гт^х и v найти направление В с помощью правила
буравчика.
Магнитную индукцию удобно также определять по вращательному моменту,
с которым магнитное поле действует на маленький виток с током. На виток с
током действует только магнитное поле.
В СИ магнитная индукция измеряется в тесла (Тл), в СГС — в гауссах (Тс).
Пример 1. Рассмотрим движение нерелятивистской частицы массой га с за-
зарядом q в однородном магнитном поле с индукцией В . Пусть в некоторый момент
времени скорость частицы v направлена под углом а к В . Сила Лоренца перпен-
перпендикулярна как к v (т.е. v = const), так и к В (т.е. сохраняются проекции скорости
v\\ и Vj_ на направление вектора индукции и на перпендикулярную к нему плос-
плоскость). В проекции на перпендикулярную плоскость частица движется по окруж-
окружности, радиус которой можно найти из второго закона Ньютона: qvLB = mv2L/R.
Период вращения Т = 2ttR/vl = 2тгга/дВ не зависит от скорости. Результирующее
движение происходит по спирали радиусом Я с шагом h = г»цТ = 2тгтг» cos a/(qB).
> Закон Ампера. Сила, действующая на элемент тока в магнитном
поле, равна сумме сил Лоренца, действующих на движущиеся свобод-
свободные заряды:
dP = qo[(v)x E]dN = nqo[(v)x E]dV = j х Й dV = I dfx В . E2)
При выводе силы Ампера, действующей на элемент объема dV с плот-
плотностью тока j и на линейный элемент dl с током /, использовалась
224
Электродинамика
связь тока со средней скоростью свободных зарядов D0). Для вы-
вычисления полной силы, действующей на объем с распределенным то-
током j(r) или на протяженный участок провода с током, надо произве-
произвести интегрирование. Например, на прямой участок провода длиной I
с током / в однородном магнитном поле с индукцией В действует
сила II х В . Сила, действующая в однородном поле на любой замкну-
замкнутый контур с током, равна нулю: F — § I dl х В — l(§ dl) х В — 0.
> Магнитный момент контура с током. Магнитным моментом
контура с током называется векторная величина рт, равная
= ljn
ds
в СГС),
E3)
где интегрирование ведется по любой поверхности, натянутой на
контур, а направление нормали определяется направлением движения
буравчика при вращении его по току. В случае плоского контура
= ^3 в СГС).
с
Магнитный момент контура, так же как и дипольный момент
электрического диполя (см. разд. 3.1 и 3.3), определяет магнитное
поле контура на больших расстояниях вдали от него и описывает
поведение маленького витка с током в магнитном поле.
Пример 2. Рассмотрим прямоуго-
прямоугольный контур, длины сторон которого
равны а и 6, подвешенный за сторо-
сторону а в однородном вертикальном магнит-
магнитном поле с индукцией В (рис. 36). При
включении тока силой / контур отклонит-
отклонится на угол /?, при котором момент си-
силы тяжести уравновешивается моментом
сил Ампера mg-^-bsmC = IBabcos/3, или
tg/? = 2lBa/(mg). Обратите внимание,
что вращательный момент, действующий
на контур со стороны магнитного поля,
равен М = IS ХВ = рт х В . Аналогичное
выражение было получено для вращатель-
вращательного момента, действующего на электри-
электрический диполь в электрическом поле (см.
Рис. 36. разд. 3.3).
В
тд
3.11. Вычисление магнитной индукции
> Закон Био — Савара — Лапласа. Магнитная индукция, созда-
создаваемая в точке А элементом тока I dl, равна
4тг
1 Idlxf
с г3
СГС), E4)
3.11. Вычисление магнитной индукции
225
где г — радиус-вектор, проведенный от элемента тока к точке А,
^0 = 4тг • 10~7 Гн/м — магнитная постоянная, с — скорость света. Это
выражение можно переписать для магнитной индукции элемента объ-
объемного тока j dV, элемента поверхностного тока г ds или, разделив на
число свободных частиц в элементе тока, для нерелятивистской ча-
частицы qv:
4тг г3 4тг г3 4тг г3
(Поверхностной плотностью тока называют силу тока, приходящу-
приходящуюся на единицу длины перпендикулярного току отрезка: dl = idl.)
Для вычисления магнитной индукции, создаваемой конечным объ-
объемом, поверхностью или проводом, надо произвести интегрирование
(принцип суперпозиции для магнитной индукции).
> О системах единиц в электромагнетизме. Формулы будут
приводиться в системе СИ. Для перехода к гауссовой системе (СГС)
в большинстве случаев достаточно заменить одновременно В на В /с
(и поток Ф на Ф/с) и /i0 на 4тг/с2. Если в формуле присутствует куло-
новская константа &, ее надо заменить на единицу, а электрическую
постоянную ?0 на 1/Dтг). Отметим, что произведение /лоео равно 1/с2.
Пример 1. Вычислить силу магнитного взаимодействия двух частиц с
зарядами qx ид2, скорости которых в некоторый момент равны г^ = v2 = v (v < с)
и направлены перпендикулярно соединяющей их линии.
Решение. Магнитная индукция, создаваемая первой частицей в точке, где
находится вторая частица, равна В = ———• (г — расстояние между части-
Атх г2
цами) и направлена перпендикулярно v и г. Сила
Лоренца в случае одноименных зарядов направле-
о
на в сторону частицы 1 и равна F = —.
4тг г2
Отношение магнитной силы к электрической рав-
2 У2
но fioeov = —.
Пример 2. Магнитная индукция, создавае-
создаваемая в центре кругового контура элементом дуги
с угловым размером dip, равна
R2
4тгЛ
Рис. 37.
и направлена вдоль оси (в сторону движения
буравчика при его вращении по току). Магнитная
индукция, создаваемая в центре окружности всем
круговым током, равна В = ——.
Пример 3. Найти магнитную индукцию кругового тока в точке А на его
оси, находящейся на расстоянии у от центра витка (рис. 37).
Решение. Вектор В направлен вдоль оси у, а вклад элемента дуги с угловым
размером dip равен
R
47Г
8 А. Д. Полянин, В, Д. Полянин и др.
226
Электродинамика
После интегрирования по <р получим
На большом расстоянии от контура (у > Я) магнитная индукция
.- JULJ
~ ~ 2у3 4тг
выражается через магнитный момент j?m = IS аналогично тому, как напряжен-
напряженность электрического поля выражается через электрический момент диполя (см.
пример 4 из разд. 3.3, случай г*|| р). Можно показать, что и в произвольной точке г*
магнитная индукция плоского маленького витка с током равна
E6)
Пример 4. Найдем магнитную индукцию, создаваемую прямым отрезком
провода в точке А, положение которой относительно отрезка задается рассто-
расстоянием у до прямой и углами а1 и а2 (рис. 38). Вклад в В элемента dx на-
направлен перпендикулярно плоскости, проходящей через отрезок и точку А, и
равен dB = — г—sin а. Интегриро-
4тг г2
вать удобно по углу а после подстанов-
подстановки г = у/ sin а и .замены переменной:
х = — у ctga, dx = yda/ sin2 а. В резуль-
результате имеем
В = _JL_/coga .—cos a*)' E7)
Any
Полагая ct^ = 0, а2 = тг, находим маг-
% нитную индукцию бесконечного прово-
провода с током:
В^О /со\
= . (ooj
Рис. 38. 2тгу
Если с помощью E7) рассчитать магнитную индукцию в центре прямоуголь-
прямоугольного контура с током, то получим
4тг
где о и Ь — длины сторон контура.
об
3.12. Циркуляция и поток вектора
магнитной индукции
> Закон полного тока. Из закона Био — Савара—Лапласа можно
вывести утверждение, что циркуляция магнитной индукции вдоль
любого замкнутого контура определяется алгебраической суммой
токов, охватываемых этим контуром (т.е. током, проходящим через
натянутую на контур поверхность):
<Ь
= /i0/O
= /i0 / j • ds,
E9)
где положительное направление нормали определяется движением
буравчика при его вращении в направлении обхода контура.
3.12. Циркуляция и поток вектора магнитной индукции 227
р> Теорема Гаусса для магнитного поля. Поток вектора маг-
магнитной индукции (магцитный поток) через любую замкнутую поверх-
поверхность равен нулю:
Ф t >ds~0. F0)
Это значит, что линии магнитной индукции всюду непрерывны, т.е.
не существует магнитных зарядов^ на которых бы начинались или
оканчивались линии поля. Магнитный поток измеряется в веберах
(Вб) в СИ, в максвеллах (Мкс) в СГС.
Пример 1. Поле соленоида. Соленоидом называется длинная цилиндриче-
цилиндрическая катушка из тонкого плотно намотанного провода. Соленоид характеризу-
характеризуют количеством витков п, намотанных на
единицу длины. Идеальной моделью соле- г ^ч /' \
ноида называют тонкую бесконечно длин- j \
I
кущим перпендикулярно образующей. Не- \ /
ную цилиндрическую поверхность с по- / j ^ i / \
верхностным током плотностью г = п/, те- J \ \i-nl \
трудно убедиться, что магнитная индук- хч / _^ \ J
ция в идеальном соленоиде всюду напра- —*-^ [ % —^ ¦i*-'—
влена параллельно образующей (для этого /
надо рассмотреть вклад любых двух сим-
симметричных элементов тока). Вне соленой- рис gg
да поле отсутствует. Из закона полного то- '
ка и теоремы Гаусса следует, что внутри соленоида Ш = const. Чтобы найти ве-
величину В, надо применить закон полного тока к прямоугольному контуру, одна
сторона которого проходит вдоль образующей внутри цилиндра, а другая —вне
(рис. 39); Bl = /ioi7. Получим, что магнитная индукция внутри соленоида равна
JB = /i0l = ^0n7. F1)
Пример 2. Поле толстого провода. Найдем магнитное поле бесконечного
прямого провода радиусом Я, по которому протекает ток / (рис. 40). Линии
индукции имеют вид окружностей. Выбирая окружность радиусом г в качестве
контура для закона полного тока E9), при г > R получим ВBттг) = /io7.
Аналогично при г < R имеем ВBттг) = /хо/Gгг2/тгЯ2). Из этих равенств находим
магнитную индукцию
В=
Пример 3. Поле плоскости с током. Рассмотрим ток, текущий по
бесконечной плоскости (х>у) в направлении оси у с постоянной плотностью i.
Магнитная индукция над плоскостью при z > 0 направлена вдоль а?, а при
z < 0 — противоположно х (в этом можно убедиться, рассмотрев вклад двух линий
тока, расположенных симметрично по отношению к данной точке). Выберем
прямоугольный контур, одна сторона которого проходит над плоскостью в
направлении х} а другая—симметрично ей под плоскостью (рис. 41). Из закона
полного тока получим: 2В1 = /ioi/, т.е. В = у
> Перемещение контура с током в магнитном поле. При пе-
перемещении или деформации контура с постоянным током / в маг-
магнитном поле работа силы Ампера, действующей на участок контура,
равна
6A = df- dr = I[dfx Ё) • df = it • [dfx dt\ = it • ds,
228
Электродинамика
г
Рис. 40.
Рис. 41.
где dr — перемещение участка контура dl, ds—элемент площади,
заметаемой этим участком при его перемещении. Суммируя вдоль
всего контура, получим, что механическая работа магнитного поля
выражается через изменение магнитного потока Ф через контур:
6Амех = ЫФ. F2)
Это значит, что контуру с током / в постоянном магнитном поле
можно сопоставить потенциальную функцию Wn = —/Ф, изменение
которой (с обратным знаком) равно работе силы Ампера:
А = —AW , W = -7Ф. F3)
мех п' п \ /
Для случаев однородного поля или маленького плоского витка фор-
формула F3) принимает вид:
Wn = -pm-B, F4)
где рт —магнитный момент контура с током (см. разд. 3.10). По-
Поскольку это выражение совпадает с потенциальной энергией электри-
электрического диполя (см. разд. 3.3), то такой же вид должны иметь вы-
выражения для вращательного момента, действующего на магнитный
момент, и для силы, действующей на него в неоднородном поле:
дВ дЁ
Й=р
ртх
F ZZ
"» Рп
, F5)
дп ~Утх дх ' rmj/ ду ' "тж dz
где вектор п параллелен вектору рт. Равновесная ориентация с ми-
минимальной энергией соответствует положению рт || В] ориентиро-
ориентированный таким образом виток втягивается в область более сильного
магнитного поля.
Уравнения Максвелла для постоянного магнитного поля. В диффе-
дифференциальной форме это уравнения
rot В = /х0/, div Й = 0,
а в интегральной — уравнения E9) и F0).
3.13. Магнитное поле в веществе 229
3.13. Магнитное поле в веществе
р> Намагниченность вещества. Вещество считается намагничен-
намагниченным, если оно создает внутри себя и в окружающем пространстве
магнитное поле в отсутствие токов проводимости. Источником маг-
магнитного поля намагниченного вещества (магнетика) являются маг-
магнитные моменты его атомов и молекул (молекулярные токи). В от-
отсутствие внешнего магнитного поля микроскопические магнитные
моменты либо отсутствуют (в диамагнетиках), либо ориентированы
хаотически (в парамагнетиках), и создаваемое ими магнитное поле
равно нулю (кроме случая постоянных магнитов, см. ниже ферромаг-
ферромагнетики). При помещении во внешнее магнитное поле вещество на-
намагничивается, т.е. возникает магнитный момент объема вещества.
Степень намагниченности в данной точке вещества характеризуют
намагниченностью J , равной магнитному моменту в расчете на еди-
единицу объема:
где п — концентрация молекул. Для построения макроскопических
уравнений поля в магнетике можно упрощенно считать, что все
молекулы в объеме AV имеют одинаковый магнитный момент
(рт) = J /п = IQs и могут быть.Представлены одинаковыми микро-
микроскопическими витками с током.
> Намагниченность и макроскопические молекулярные то-
токи. При описании собственного магнитного поля огромное число
ориентированных микроскопических витков (магнитных моментов)
можно заменить распределенными по поверхности и объему макро-
макроскопическими молекулярными токами. Проще всего представить се-
себе такую замену в случае однородно намагниченного цилиндра, ког-
когда молекулярные витки с током ориентированы вдоль его оси. Вну-
Внутри цилиндра токи различных витков будут скомпенсированы, э< по
поверхности будет течь некомпенсированный поверхностный ток.
Магнитная индукция этого тока Всо6 будет внутри цилиндра напра-
направлена б ту же сторону, что и намагниченность J .
Если рассмотреть произвольный замкнутый контур, то его уча-
участок ей, расположенный внутри магне-
магнетика, пронизывает те витки, центры
которых попали в объем dV = s • dl
(рис. 42). На этом участке вклад
в охватываемый контуром молеку-
молекулярный ток (пересекающий натяну-
натянутую на контур поверхность) равен
IQndV = nlos • dl = J • dl. Производя Рис. 42.
230 Электродинамика
интегрирование, получим
7 : df= /^х°вл ( I 7 • dl= 1-1™™ в СГС). F7)
\ J с '
В дифференциальной форме имеем: rot 7 = jMOJI (rot 7 = ~-jM0JI
в СГС). Из этих уравнений можно получить выражение для плотности
тока на поверхности магнетика:
гмол = 7 хп (гмол = с 7 х п в СГС), F8)
где п — внешняя нормаль к поверхности магнетика.
> Напряженность магнитного поля. Макроскопическая индук-
индукция магнитного поля в магнетике определяется как результат усред-
усреднения микроскопической В, сильно меняющейся на межатомных рас-
расстояниях, по малому объему, содержащему достаточно много моле-
молекул: В (г) = (Вмикро). Индукция поля определяется как молекуляр-
молекулярными, так и сторонними токами (т.е. немолекулярными — токами
проводимости, конвекционными токами):
3+ет- F9)
Так как распределение молекулярных токов обычно не известно, удоб-
удобно ввести новую величину, называемую напряженностью магнитно-
магнитного поля:
Й=: — -7 (#=#~4тг7 в СГС), G0)
которая определяется только сторонними токами:
"= 7?. (fti. df= ^1ЦВ в СГС) G1)
(закон полного тока для напряженности). В дифференциальной фор-
форме имеем: rot Я = /ст (rot Я = —/ст в СГС). Напряженность изме-
измеряется в А/м в СИ, в эрстедах (Э) —в СГС.
> Условия на границе раздела магнетиков. На границе раздела
двух магнетиков выполняются следующие условия для тангенциаль-
тангенциальных (касательных) и нормальных компонент:
(нормаль п проведена из первой среды во вторую, \п х п\ = Яг). Если
стороннего тока на границе нет, то второе условие можно записать
в виде Я1г = Я2г. Первое условие получается из теоремы Гаусса F0)
для вектора В) второе — из G1), третье — из F8). По граничным
условиям наблюдается формальная аналогия между Я и I?, а также
между В и D (см. разд. 3.6).
3.13. Магнитное поле в веществе 231
р> Изотропный магнетик. Намагниченность 7 в данной точке
магнетика возникает под воздействием магнитного поля и определя-
определяется его индукцией В. В не очень сильных полях 7 зависит от В
линейно, а в изотропном магнетике, кроме того, 7 || Ж. В этом слу-
случае векторы 7иЯ пропорциональны В и друг другу, и по истори-
историческим причинам (в силу аналогии между граничными условиями для
Е и Н) магнитная восприимчивость определяется соотношением
Из формулы G0) получим:
$ Й=цд в СГС), G4)
где /i — магнитная проницаемость вещества. В парамагнетиках
X > 0, в диамагнетиках х < 0> в обоих случаях |х| ^С 1 (слабые
магнитные свойства). В ферромагнетиках х 2> 1.
Объемная плотность молекулярного тока пропорциональна объ-
объемной плотности стороннего тока: jMOJ1 = xiCTi если объемных сто-
сторонних токов нет, то при намагничивании возникают только поверх-
поверхностные молекулярные токи.
Граничные условия на границе двух изотропных магнетиков име-
имеют вид
ИЧ Р2
Если границы однородного магнетика всюду касаются линий индук-
индукции поля Жо, которое было до внесения магнетика, то всюду в маг-
магнетике В = fiBQ.
Пример 1. Рассмотрим длинный цилиндр из парамагнетика, помещен-
помещенный в однородное магнитное поле, индукция которого Во параллельна его
оси. Всюду внутри цилиндра (кроме его краев) имеем: магнитная индукция
Ш = \i Во, напряженность магнитного поля И = Но = В 0/д0, намагниченность:
7 = (м-1)#о//*о-
Пример 2. Рассмотрим бесконечный цилиндрический провод круглого сече-
сечения из материала с магнитной проницаемостью /х > 1, по которому течет посто-
постоянный ток плотностью j. Молекулярный ток в объеме цилиндра имеет плотность
,?мол = (д — l)j. Напряженность Н можно найти с помощью закона полного то-
тока G1); она равна Н = //Bтгг) при г > R и Я = /г/BтгЛ2) при г < R (см. пример
2 из разд. 3.12). Магнитная индукция равна В = /х0Я при г > R и В = }J>qIJ>H
при г < R; она испытывает скачок на поверхностном молекулярном токе. Намаг-
Намагниченность равна J = (ц, — 1)/г/BтгЯ2) (вне цилиндра J = 0). Линии .магнитной
индукции представляют собой концентрические окружности, а ли? параллель-
параллельны а . Поверхностный молекулярный ток равен ?= 7 X ?Т; он равен по модулю
%нол = (д — 1)//BтгЯ) и направлен противоположно j. Полный молекулярный ток
равен нулю: juoa^R2 = гМ0Л2тгЛ.
Пример 3. Рассмотрим сердечник из ферромагнетика (д ^> 1) в виде тора со
средним радиусом Л, на который намотана обмотка с большим числом N витков
232 Электродинамика
с током силой /. В сердечнике сделана узкая поперечная прорезь шириной Ь. Маг-
Магнитная индукция непрерывна на границах прорези, поэтому В имеет одинаковое
значение всюду на оси сердечника. Чтобы найти В, запишем закон полного тока
для напряженности: N1 = Ь Н 2тгЯ. Получим: В = —^Г Г-
> Механизмы намагничивания. Магнитные моменты атомов и
молекул создаются: а) движением электронов по замкнутым орбитам
(орбитальные магнитные моменты); б) собственными магнитными
моментами электронов, связанными с внутренним механическим мо-
моментом — спином (спиновые магнитные моменты). Магнитный мо-
момент каждого типа пропорционален своему механическому моменту:
рт = д L , где множитель д называют гиромагнитным отношением.
Для орбитального момента д = — уе/те.
Для спинового момента д•= —е/т.
В диамагнетике магнитные моменты всех электронов атома (мо-
(молекулы) в отсутствие магнитного поля компенсируют друг друга.
При включении магнитного поля на каждый магнитный момент на-
начинает действовать вращательный момент, под действием которого
происходит вращение магнитного момента вокруг направления маг-
магнитного поля (лармороеская прецессия):
тх Й = -дВ х t.
=рт
Вектор L (и рт) совершает вращение с угловой скоростью шл = — д В .
Такое вращение приводит к появлению у каждого рт дополнитель-
дополнительного магнитного момента, направленного против В (независимо от
направления исходного рт).
В парамагнетике магнитные моменты электронов в атоме не ком-
компенсируют друг друга даже в отсутствие магнитного поля. На сла-
слабый диамагнитный механизм намагничивания накладывается более
сильный ориентационный механизм: в присутствии поля ориентация
магнитного момента по полю оказывается энергетически более вы-
выгодной. В слабых полях (ртВ <С кТ) средний магнитный момент про-
пропорционален магнитной индукции, в сильных полях происходит насы-
насыщение, все магнитные моменты повернуты вдоль поля, и намагничен-
намагниченность практически не меняется. (Ориентационный механизм намаг-
намагничивания парамагнетиков аналогичен ориентационному механизму
поляризации полярных диэлектриков, см. разд. 3.6. В частности, оста-
остается верным вывод об обратно пропорциональной зависимости вос-
восприимчивости от температуры.)
> Ферромагнетиками называются вещества, в которых суще-
существует спонтанная намагниченность в макроскопических (больших
по сравнению с межатомными расстояниями) областях — доменах.
Размеры доменов (~ 10~5 -~ 10~4 м) малы по сравнению с размером
3.13. Магнитное поле в веществе
233
Я
образца. В пределах каждого домена спиновые магнитные моменты
ориентированы параллельно друг другу, что является результатом
специального квантового (обменного) взаимодействия между ними.
В отсутствие магнитного поля домены ориентированы таким обра-
образом, что средняя намагниченность вещества равна нулю. При включе-
включении магнитного поля размеры доменов, направленных вдоль поля,
увеличиваются, направленных против поля — уменьшаются. При уве-
увеличении поля начинается поворот доменов как целого в направлении
поля. В сильных полях домены ориентированы вдоль поля, т.е. насту-
наступает насыщение (намагниченность достигает максимального значе-
значения JH, называемого намагниченностью насыщения).
Зависимость 7 от п носит нелинейный характер (рис. 43), т.е.
магнитная проницаемость, определяе- г^
мая формулой 7 = (/i — 1)Я, зависит
от Я и достигает громадных значе-
значений /i ~ 105 -г 10б. При снятии внешне-
внешнего поля в веществе наблюдается оста-
остаточная намагниченность 7ОСТ. Напря-
Напряженность Як магнитного поля, полно-
полностью размагничивающего ферромаг-
ферромагнитный образец, называется коэрцес-
сиеной силой. Ферромагнетики, обла-
обладающие большой Як, используются
для изготовления постоянных магнитов. Зависимость J{H) при пря-
прямом и обратном намагничивании до насыщения называется петлей
гистерезиса.
При нагревании выше температуры Кюри вещество теряет фер-
ферромагнитные свойства (спонтанная намагниченность доменов исче-
исчезает) и становится шарамагнетиком. В точке Кюри происходит фа-
фазовый переход второго рода.
> Эффект Холла. При помещении проводника с током в попереч-
поперечное (перпендикулярное току) магнитное поле в проводнике возникает
поперечное электростатическое поле, направленное перпендикулярно
магнитной индукции. Это поле возникает в результате смещения упо-
рядоченно движущихся свободных зарядов под действием силы Ло-
Лоренца, которое продолжается до тех пор, пока сила Лоренца не бу-
будет уравновешена электрической силой: qQ[(v) х В.] = qQ Е. Домножив
на концентрацию свободных зарядов п, выразим Е через „плотность
тока. В результате получим Е = j х В. Видно, что измерение
qon
величины и направления напряженности в эффекте Холла позволяет
определить как концентрацию свободных зарядов (в случае свобод-
свободных зарядов одного типа), так и их знак.
Рис. 43.
234 Электродинамика
3.14. Электромагнитная индукция
> Закон электромагнитной индукции. Цри перемещении или
деформации контура с током в постоянном магнитном поле силы
Ампера, направленные на каждом участке перпендикулярно току,
согласно F2) совершают механическую работу SAL = ЫФ. Так
как полная работа силы Лоренца над любой движущейся частицей
равна нулю, то такая же по величине, но обратная по знаку работа
совершается магнитным полем (тангенциальной компонентой силы
Лоренца) над движущимися по контуру свободными зарядами, что
приводит к возникновению в контуре дополнительной ЭДС индукции:
^ G5)
Из принципа относительности Эйнштейна следует, что ЭДС ин-
индукции должна возникать и при помещении неподвижного контура в
изменяющееся со временем магнитное поле. Рассмотрим, например,
сближение с постоянной скоростью замкнутого контура и постоян-
постоянного магнита. В инерциальной системе отсчета (ИСО), связанной с
магнитом, создаваемое им поле не зависит от времени, и возникнове-
возникновение ЭДС в контуре объясняется действием силы Лоренца. В другой
ИСО, связанной с контуром, наблюдается такая же ЭДС, но в не-
неподвижном проводнике она не может быть вызвана магнитными си-
силами. Следовательно, в изменяющемся со временем магнитном поле
должно возникать электрическое поле. Так как работа этого поля при
обходе контура должна быть отлична от нуля, то это поле не является
электростатическим: его называют вихревым электрическим полем.
Итак, независимо от причины, по которой меняется пронизывающий
контур магнитный поток, в нем возникает ЭДС индукции, равная
(закон Фарадея). Средняя ЭДС индукции за конечное время Д< равна
^ср = ""*ДФ/Д?- Прошедший по контуру за это время заряд равен
q = J Idt = J(f/R) dt = —(ДФ/Я), где R — сопротивление контура.
Правило Ленца. Направление ЭДС определяется ее знаком; напомним (см.
разд. 3.12), что контур должен быть ориентир о ванным: положительное направле-
направление нормали к поверхности при вычислении Ф и положительное направление обхо-
обхода контура для определения знака ЭДС должны быть связаны правилом буравчи-
буравчика. Знак *— ¦ в формуле G6) соответствует правилу Лтца% которое утверждает,
что ЭДС индукции должна иметь такое направление, чтобы магнитное поле те-
текущего в этом направлении тока создавало магнитный поток противоположного
знака по сравнению с тем изменением потока, которое является причиной воз-
возникновения ЭДС. Правило Ленца тесно связано с законом сохранения энергии.
> Движение участка контура. При движении элемента конту-
контура dl со скоростью v работа силы Лоренца по переносу пробного заг
ряда q вдоль dl равна 8 А = q[v х Ж] • dl = q d$. ЭДС, наводимые при
3.14. Электромагнитная индукция 235
Рис. 44.
произвольном движении участка и при поступательном движении в
однородном поле, равны соответственно:
?= f[vxjS]-dt, $=[vx t]-h G7)
где / — вектор, соединяющий начало и конец участка. Если концы
движущегося проводника разомкнуты, то между ними возникает
разность потенциалов,, равная ЭДС (в каждой точке проводника
электростатическая сила уравновешивается силой Лоренца).
Пример 1. Рассмотрим движение перемычки сопротивлением г в вертикаль-
вертикальном магнитном поле (рис. 44) по двум горизонтальным рельсам, расстояние меж-
между которыми равно /. Предположим, что рельсы замкнуты с одной стороны от пе-
перемычки сопротивлением Rx, а с другой— сопротивлением Я2. Чтобы найти ток
через перемычку при ее движении со скоростью */, используя G7), вычислим ЭДС
в перемычке: Щ' = Bvl. Тот факт, что ЭДС локализована в движущейся перемыч-
~ке, позволяет изобразить эквивалентную схему и найти силу тока: I = %j(r -f Я),
где Я =Я1Я2/(Я1+Яг).
> Уравнения вихревого электрического поля. Уравнение для
вихревого поля в интегральной форме получается при записи закона
Фарадея G6) для неподвижного контура в переменном магнитном
поле:
I Ё .dt=~ [ t -ds. G8)
Так как циркуляция напряженности электростатического поля по за-
замкнутому контуру равна нулю, то такому же уравнению удовлетворя-
удовлетворяет полное электрическое поле. Дифференциальная форма этого урав-
уравнения имеет вид
к*Я = ~. G9)
Уравнения G8), G9) представляют собой одно из уравнений Максвел-
Максвелла (в интегральной и дифференциальной формах).
> Квазистационарное приближение. Бели токи и поля меняют-
меняются не очень быстро, то можно пренебречь запаздыванием процессов
по времени. Сказанное означает, что переменное магнитное поле в
любой точке системы определяется (по формулам Био — Савара —
Лапласа) токами в этот же момент времени; электростатическое по-
поле определяется распределением зарядов в этот же момент времени,
236 Электродинамика
а вихревое электрическое поле вычисляется по изменяющемуся маг-
магнитному полю с помощью G8), G9). Именно в этом приближении рас-
рассчитываются цепи переменного тока. Для выполнения этого прибли-
приближения надо, чтобы характерное время изменения токов т было вели-
велико по сравнению, во-первых, с временами локальных релаксационных
процессов (например, временем установления равновесного распреде-
распределения заряда на проводнике еор)> и во-вторых, со временем запазды-
запаздывания т3 = 1/с (I — характерный размер системы). Последнее условие
означает, что мы пренебрегаем током смещения в уравнениях Макс-
Максвелла.
Пример 2. Оценим время перераспределения заряда на проводни-
проводнике. Будем считать, что где-то в проводнике образовался объемный за-
заряд. Убывание заряда внутри произвольного объема подчиняется уравнению
dq Г . , 1 Г f q ( t \
-ТГ = - Ф Jndsz= Ф Ends- , т.е. q = qoexp[ 1.
dt J p J eQp \ eop J
> Самоиндукция и взаимная индукция. Рассмотрим неподвиж-
неподвижный контур с током. Предположим, что ток / в этом контуре рав-
равномерно изменяется со временем. Создаваемая этим током магнит-
магнитная индукция будет меняться со скоростью, пропорциональной dl/dt.
Следовательно, возникающее в каждой точке пространства вихревое
поле тоже пропорционально dl/dt. Это поле создает в контуре ЭДС
самоиндукции:
СГС)>
(80)
где L называется коэффициентом самоиндукции или индуктивно-
индуктивностью контура. Индуктивность измеряется в генри (в СГС — в см).
Величину Фс = Ы (Фс = ^Ы в СГС) называют потокосцеплением
самоиндукции контура. С учетом (80) получим:
Эта формула оказывается верной и в том случае, когда изменяется
не только /, но и L.
Заметим, что определение L как коэффициента пропорциональности между
потоком и током встречается с трудностями: в случае линейного провода соб-
собственный поток бесконечен, а для провода конечной толщины обычное определе-
определение потока не годится.
Пример 3. Индуктивность соленоида. Рассмотрим соленоид длиной /
и площадью S (I >- \/S), по которому течет ток с поверхностной плотностью
i = (N/l)I, где N — число витков, / — ток в обмотке. Магнитное поле в соле-
соленоиде однородно, его индукция (в приближении идеального соленоида) согласно
формуле F1) равна В = [iQiii. При изменении тока циркуляция вихревого поля
/=f - dB di
Е • dl = —S = —imqjjlS—, а ЭДС на всей длине обмотки
dt dt
a? AT odi N2iioy,S dl n
равна фс = —N^q^lS-—- = f —-. Для индуктивности и потокосцепления
dt I dt
3.14. Электромагнитная индукция 237
получим:
L = N ^S , Ф = Ы = NBS. (82)
Пример 4. Так как ЭДС самоиндукции пропорциональна скорости измене-
изменения тока, то наличие в контуре индуктивности препятствует слишком быстрым
изменениям тока. Предположим, что последовательно соединенные сопротивле-
сопротивление Я и катушку индуктивностью L замкнули на источник с постоянной ЭДС,
равной <?. Нарастание тока от нуля до /0 = %jR происходит за конечное вре-
время и подчиняется уравнению % — L(dl/dt) = /Я, решение которого имеет вид
/ = /0[1 — ехр(—tR/L)]. Характерное время нарастания тока равно т = L/R.
Если имеется два неподвижных контура, то изменение тока одно-
одного контура вызовет в другом пропорциональную dl/dt ЭДС взаимной
индукции:
9- = -L -^L <х = _? ^Ь- (83)
где L12 и L21 называются коэффициентами взаимной индукции] для
них оказывается верна теорема взаимности: L12 = L21 (в неферро-
неферромагнитной среде). Потокосцепление взаимной индукции определяется
как Ф12 = L12I2. Эта величина оказывается определенной и для двух
линейных токов (в этом случае Ф = Ф).
> Энергия контура. Энергией контура с током называется работа
внешних сил и источников при создании тока (или работа вихревого
поля при его уничтожении). Работа источника против ЭДС самоин-
самоиндукции контура вычисляется так:
При последовательно полевом подходе энергия должна быть свя-
связана не с током в контуре, а с магнитным полем. Зависимость плотно-
плотности энергии от магнитной индукции проще всего установить в случае
длинного соленоида, в котором поле однородно:
W I wN2S I2 (WIN}2 1 В2 ВН
V SI I 2 \ I J 2/i0/i 2(хФ 2 '
В случае нелинейной зависимости В от п для плотности энергии
получается выражение:
Используя теорему взаимности (L12 = L2l)) можно получить
обобщение выражения (84) для нескольких контуров:
238 Электродинамика
Здесь Ф, — полное потокосцепление для t-то контура. Видно, что
энергия токов включает в себя энергию каждого тока и энергию
их взаимодействия. С помощью уравнений магнитного поля можно
показать, что это выражение всегда преобразуется к виду:
v
> Закон сохранения энергии и вычисление сил. При медлен-
медленном изотермическом изменении расположения тел и контуров с током
суммарная работа внешних сил и источников тока идет на изменение
энергии магнитного поля и на выделение джоулевой теплоты. При
этом работа внешних сил над каждым телом равна работе сил, дей-
действующих на тело со стороны магнитного поля. Если токи поддер-
поддерживаются постоянными, то надо учитывать только дополнительную
работу источников против ЭДС индукции, а работа исходной ЭДС
равна выделяющейся теплоте, и в законе сохранения энергии они со-
сокращаются.
Пример 5. Рассмотрим два контура с токами 1Х и /2, которые поддержива-
поддерживаются постоянными. Запишем закон сохранения энергии при медленном смещении
первого контура. Согласно (86) изменяется только энергия взаимодействия то-
токов, равная Wl2 = Lx2lxl2 = 1\$\2 = A$i2» гДе $12 —поток в первом контуре,
создаваемый вторым током. В то же время потенциальная функция контура с
током во внешнем поле равна Wa = —/Ф, см. F3). Кажущееся противоречие объ-
объясняется, если учесть дополнительную работу источников против ЭДС индукции
в каждом контуре. Эта работа равна /j dФ12 + /2^21 = А ^12 h "Ь h ^21 А» что
в два раза больше, чем изменение энергии поля dWl2 = IXI2 dLl2.
3.15. Уравнения Максвелла
> Ток смещения. Для обобщения уравнений электромагнитного
поля в вакууме на переменные поля необходимо изменить только од-
одна из написанных ранее уравнений (см. разд. 3.4, 3.12); три урав-
уравнения оказываются верными в общем случае. Однако закон полного
тока для магнитного поля в случае переменных полей и токов оказы-
оказывается неверным. В соответствии с этим законом ток f j • Одолжен
быть одинаковым для любых двух натянутых
на контур поверхностей; если заряд в объеме
^» между выбранными поверхностями меняет-
меняется, то это утверждение вступает в противо-
рис# 45# речие с законом сохранения заряда. Напри-
Например, при зарядке конденсатора (рис. 45) ток
.через одну из указанных поверхностей равен / = dq/dt) а через дру-
другую (проходящую между пластинами) — нулю. Чтобы снять указан-
указанное противоречие, Максвелл ввел в это уравнение ток смещения) про-
пропорциональный скорости изменения электрического поля:
7 _ д$ h _ 1 д$ п сгс\ (ы\
•7см - "~57~ Wcm - ТГ~аГ в огЧ- \Щ
3,15. Уравнения Максвелла 239
В диэлектрической среде выражение для тока смещения принимает
вид:
Первый член представляет собой плотность тока смещения в ва-
вакууме, второй — реальный ток, обусловленный движением связан-
связанных зарядов при изменении поляризованности. Ток смещения через
поверхность равен d^D/dt) где Ф^ — поток вектора и через по-
поверхность. Введение тока смещения снимает противоречие с зако-
законом сохранения заряда. Например, при зарядке плоского конденсато-
конденсатора ток смещения через поверхность, проходящую между пластинами,
4м = S(dD/dt) = S(dcr/dt) = dq/dt) равен току по подводящим про-
проводам.
> Система уравнений Максвелла в вакууме. После введения
тока смещения система уравнений Максвелла в дифференциальной
форме принимает вид:
1) rot j? = ~-0р 2) rot Ё = /i0J +
3) div t = р/еа, 4) div t = 0.
Система уравнений Максвелла в интегральной форме:
-dl 2)
3) i$-ds = — [pdV, 4) iE'ds = Q.
Приведем также запись уравнений Максвелла в дифференциальной форме в
системе СГС:
2)
79Г
3) div Ж = 4irf>, 4) div Й = 0.
Плотности заряда и тока связаны соотношением
выражающим закон сохранения заряда (это уравнение является след-
следствием уравнений Максвелла).
240 Электродинамика
Уравнения Максвелла в среде имеют вид:
дифференциальная форма интегральная форма
2) I0tfi = f+^] ?й dt= [j-ds
3) div5 = />, j> ds = fpdV,
* 4)- div^ = 0, ifi -ds = O
и служат для определения четырех величин Е) D, 5 , Я. К уравнени-
уравнениям Максвелла, в среде надо добавить материальные уравнения связи
между D, 1и1, J5, характеризующие электрические и магнитные
свойства среды. Для изотропных линейных сред эти уравнения име-
имеют вид:
$ Ё Й
Из уравнений Максвелла можно получить граничные условия для
#, 5, Л, If (см. разд. 3.6, 3.13).
> . Закон сохранения энергии для электромагнитного поля.
Из уравнений Максвелла можно вывести следующее уравнение для
любого объема V, ограниченного поверхностью 5:
Первый член описывает изменение энергии электромагнитного поля
в рассматриваемом объеме. Видно, что в общем случае для плотности
энергии электромагнитного поля оказываются верными формулы,
полученные ранее для постоянного электрического и магнитного
полей. Второй член представляет собой работу поля над частицами
в рассматриваемом объеме. Наконец, третий член описывает поток
электромагнитной энергии через ограничивающую объем замкнутую
поверхность. Плотность потока энергии в данной точке пространства
(вектор Пойнтинга) определяется векторами Е и В в этой же
точке:
? = — Ё х $ = Ё х Й. (90)
Последнее выражение справедливо и для плотности потока электро-
электромагнитной энергии в веществе. Плотность энергии в среде имеет вид:
w= \~Й •?> + у$ -Й. (91)
3.15. Уравнения Максвелла 241
Пример 1. Рассмотрим зарядку плоского конденсатора с круглыми пласти-
пластинами, расположенными на расстоянии 6. Скорость изменения энергии в цилиндре
радиусом г (меньше размеров пластин) равна —f у?ое2?2Дтгг2Ь) = ттг^ЬЕ .
Напряженность магнитного поля найдем из второго уравнения Максвелла:
ЯBтгг) = —р-(тгг2) (справастоит ток смещения). Получаем, что скорость прито-
dt
ка энергии через боковую поверхность цилиндра: 5Bят6) = НЕBтггЬ) = Етгг2Ь——
dt
равна скорости изменения энергии в объеме.
^ Релятивистские свойства полей. При переходе из одной инер-
циалыюй системы отсчета (ИСО) в другую изменяются как источ-
источники электромагнитного поля (плотности заряда и тока), так и сами
поля, но уравнения Максвелла сохраняют свой вид. Проще всего вы-
выглядят формулы преобразования для источников ри j = pv (р— плот-
плотность движущегося заряда). Если обозначить за р0 плотность заряда
в ИСО, в которой j = v = 0, то с учетом сокращения продольных
размеров (см. разд. 1.11) получим
7 =
Сравнивая с 4-вектором энергии-импульса, видим, что (j, pc) образу-
образуют 4-вектор, т.е. преобразуются друг через друга так же, как (f, ctf),
по формулам преобразования Лоренца. Зная, как преобразуются ис-
источники поля, можно найти формулы для преобразования Е, В. Они
выглядят так:
Здесь V —скорость системы отсчета К' относительно системы К)
преобразования записаны для компонент полей, параллельных и пер-
перпендикулярных V. Инвариантами этих преобразований являются
скалярные величины Е • В и?2- с2В2:
? . t = & • Ё'\ Е2 - с2В2 = {Е1J - с2{В'J. (93)
При V <С с формулы преобразования полей принимают следующий
упрощенный вид:
#;= ^+^х 5, И'=Й-\$х 1. (94)
Пример 2. Магнитное поле нерелятивистской частицы. Рассмотрим
частицу, которая движется относительно ИСО К с постоянной нерелятивистской
скоростью v. В ИСО А';, связанной с движущейся частицей, имеется только
электрическое поле Е1 = kqrf/rt3. Для перехода в ИСО К надо записать формулы
242 Колебания и волны
преобразования (94) с V = —гТ. Учитывая, что в нерелятивистском пределе длины
отрезков не меняется, получим (для момента, когда частица проходи^ в К" через
начало координат):
ь = & = г, d =— .
4тге0 г с 4тг г*3
При выводе этих формул было использовано равенство 1/с2 = /ioeo.
Пример 3. Поляризация диэлектрика при движении в магнитном
поле. При движении диэлектрика с нерелятивистской скоростью перпендикуляр-
перпендикулярно линиям индукции магнитного поля происходит его поляризация. В ИСО, свя-
связанной с диэлектриком, существует поперечное электрическое поле Е- =?xf.
Характер поляризации диэлектрика зависит от его формы.
Пример 4. Электрическое поле релятивистской частицы. Рассмо-
Рассмотрим частицу, которая движется относительно ИСО К с постоянной релятивист-
релятивистской скоростью 0. В ИСО К', связанной с движущейся частицей, имеется только
электрическое поле Е' = fcgr'/r'3. Для перехода в ИСО К следует использовать
формулы преобразования (92) с V = —#. Запишем ответ для момента времени,
когда частица в ИСО К проходит через начало координат, для точки, лежащей
в плоскости (х,у). При переходе от координат (xf,yf) к координатам (х,у) надо
учесть, что х1 = 7#> У1 — У (координаты точки измеряются в К одновременно с
прохождением частицы через начало координат). В результате получим
F - F' - h qlX F - -l-F' - l Я1У
Видно, что вектор Е коллинеарен вектору г. Однако- на одном и том же
расстоянии от заряда поле в точке, расположенной на линии его движения,
меньше, чем в точке, расположенной на перпендикуляре к скорости. Магнитное
поле в той же точке определяется выражением:
g= -Lgxif = Jlgx g = 4-gx i?= *L .. ]f ¦
с2 с2 с2 4тг [(та:J + у2]3/2
Отметим, что рассмотренное электрическое поле не является потенциальным.
4. Колебания и волны
4.1. Гармонические колебания. Сложение
колебаний
> Общие определения. Колебаниями называют такое изменение
состояния системы, при котором параметры состояния меняются со
временем по периодическому или почти периодическому закону. Если
колебания происходят под воздействием внешнего периодического
воздействия, то их называют вынужденными. Если колебания про-
происходят без внешних воздействий, за счет отклонения системы от
устойчивого положения равновесия, то их называют свободными или
собственными. Кодебания характеризуются периодом Т и частотой
v = 1/Г (измеряется в герцах: Гц).
4.1. Гармонические колебания. Сложение колебаний 243
р> Гармонические колебания. Колебания величины х называют
гармоническими, если она меняется со временем t по закону:
х = Acos(ut + v?o)> A)
где А — амплитуда колебаний, <p~(ut + (pQ) — фаза колебаний, <р0 —
начальная фаза, и) = 2тг/Т — циклическая, или круговая, частота
колебаний. Первая и вторая производные величины х по времени
х = -Ло; sin(u)t + <?0) = ^ cos{u)t + <pQ + тг/2),
? = - Aj2 cos(w< + tpQ) = -Aw2 cos(cj* + <pQ + тг)
совершают гармонические колебания с такой же частЪтой, но с ам-
амплитудами и А и и>2 А и со сдвигом по фазе на тг/2 и тг соответственно.
Пример. Если известны начальные (при t = 0) значения величины я:
х@) = а?0 и ее производной: х@) = г»0, то можно определить амплитуду и
начальную фазу колебаний. Из уравнений xQ = Acos(/?0 и f0 = —wAsin v?0 находим
^ Уравнение гармонических колебаний. Как видно из B), если
величина х изменяется по закону гармонических колебаний A), то
она удовлетворяет уравнению гармонических колебаний:
х + и2х = 0. C)
Верно и обратное утверждение: если уравнение движения физической
системы, состояние которой определяется одной величиной х, удалось
при некоторых условиях (обычно — при малых значениях х) привести
к дифференциальному уравнению х + 'ух = 0, где 7 — положительная
постоянная, то х изменяется по закону A) с и = у/у (параметры А
и <р0 определяются начальными условиями, см. пример 1).
Если при изменении состояния физической системы квадратичная
функция
Е = y/i±2 + \>cx2 (/i, х — положительные константы) D)
остается постоянной: Е = const, то х изменяется по закону A) при
ш = \JhJ\x. Действительно, продифференцировав D) по времени, по-
полу чим^уравнение fix + хх = 0, которое являeтqя уравнением гармо-
гармонических колебаний. Обычно величина Е пропорциональна энергии
колебательной системы при малых х, поэтому такой подход называ-
называют энергетическим методом определения частоты колебаний.
> Комплексная экспонента и векторная диаграмма. Формула
Эйлера ехр(г^) = cos ф + i sin ф позволяет рассматривать закон гармо-
гармонических колебаний A) как действительную часть комплексной экс-
экспоненты x(t) = Re ж, где
х = Aexp(iu;t)t E)
244
Колебания и волны
a, A = Aexp(i(p0) называется комплексной амплитудой колебаний. Та-
Такой подход особенно удобен при рассмотрении систем, которые опи-
описываются линейными уравнениями, так как в этом случае действи-
действительная и мнимая часть преобразуются независимо друг от друга.
Закон гармонических колебаний A) может быть получен как про-
проекция на ось х радиуса-вектора величиной А, который равномер-
равномерно вращается против часовой стрелки с постоянной угловой скоро-
скоростью lj от начального углового положения <р0 (в этом случае угол
с осью х меняется по закону (р = <р0 + u)t). Такой подход называет-
называется методом векторных диаграмм) он особенно удобен при сложении
гармонических колебаний, так как позволяет сложение функций за-
заменить наглядным сложением векторов (проекция суммы векторов
равна сумме проекций).
> Сложение гармонических колебаний одного направления.
Сумма двух гармонических колебаний одинаковой частоты, ампли-
амплитуды которых равны Аг и А2, а, начальные фазы — <рг и <р2) пред-
представляет собой гармоническое колебание
такой же частоты, амплитуда и началь-
начальная фаза которого могут быть найдены
методом векторных диаграмм (рис. 46):
А2 = А\ + А\ + 2АХА2 cos((p2 — (pl))
Alsmipl^rA2smip2
Аг cos (рг + А2 cos (p2
(параллелограмм на векторной диаграмме вращается с угловой скоро-
скоростью и как одно целое). Разность фаз колебаний одинаковой частоты
не меняется со временем; такие колебания называются когерентны-
когерентными. При (р2 — (рх= ±2штг амплитуда максимальна: А = Аг + А2) а при
(р2 — <рх = ±Bга + 1)тг — минимальна: А = \Аг — А%\.
При сложении некогерентных колебаний с различными частота-
частотами параллелограмм на векторной диаграмме деформируется со вре-
временем, модуль результирующего вектора и угловая скорость его
вращения меняются, т.е. движение не является гармоническим ко-
колебанием. Однако при сложении колебаний с близкими частотами
(Да; = \шх — lj2\ <g ^1,^2) на промежутке времени, малом по срав-
сравнению с временем когерентности тКОГ = 2тг/До;, колебания можно
считать приблизительно когерентными. Колебания происходят с ци-
циклической частотой ш = (шх +ш2)/2, а их амплитуда периодически (с
периодом 2тг/До;) изменяется от Ах + А2 до \АХ - А2\. Такие колеба-
колебания называются биениями, и>б = Да; — циклической частотой биений,
а период изменения амплитуды Тб = 2к/'л6 — периодом биений. Если
Ах = А2 = А, то
4.2. Свободные незатухающие колебания 245
Биения представляют собой один из примеров модулированных
колебаний, т.е. колебаний, происходящих по закону гармонических
колебаний A), в котором один из параметров периодически изме-
изменяется со временем с периодом, значительно превышающим период
основных колебаний. Различают амплитудную, частотную и фазовую
модуляции.
Произвольное периодическое колебание с периодом Т может быть
разложено в ряд Фурье по гармоническим колебаниям с частотами
ип = пBтг/Т1). Такое разложение называется гармоническим анализом
периодического колебания, а члены разложения — первой (основной),
второй, третьей и т.д. гармониками периодического колебания. Не-
Непериодические колебания имеют, как правило, непрерывный спектр
частот и могут быть представлены в виде интеграла Фурье по гар-
гармоническим колебаниям всех частот от нуля до бесконечности. Пе-
Периодические колебания имеют линейчатый спектр частот, однако не
любые колебания с линейчатым спектром являются периодическими.
> Сложение взаимно перпендикулярных гармонических ко-
колебаний. Если точка движется по плоскости таким образом, что ее
проекции на оси х) у совершают гармонические колебания, то го-
говорят о сложении взаимно перпендикулярных гармонических колеба-
колебаний. При сложении колебаний одинаковой частоты х = Аг cosfat+tpi)
и у = Л2 cos(LJt + (p2) траекторией точки является наклонный эллипс:
х2 , У2 2яу . 2
IT + ~42" ~ 7XCOS^2 - Vi) = sin'(p2 - (prf.
Такое движение называют эллиптически поляризованными колебани-
колебаниями. При ip2 — ip1 = Bт+1)тг/2 оси эллипса совпадают с осями коорди-
координат. При <р2 ~ ф\ = гитг эллипс вырождается в прямую; такое движение
называется линейно поляризованными колебаниями. Движение точки
может происходить по часовой стрелке (при 2ттг < ip2 ~^>1 < 2т7г+тг)
или против часовой стрелки; в этих случаях говорят о правой или ле-
левой эллиптической поляризации.
При сложении взаимно перпендикулярных колебаний с различны-
различными, но кратными частотами результирующее движение происходит
по траекториям, называемым фигурами Лиссажу. По виду фигуры
Лиссажу можно установить отношение частот.
4.2. Свободные незатухающие колебания
> Свободные механические колебания. Если смещение консер-
консервативной механической системы из положения устойчивого равнове-
равновесия описывается одним параметром х) то при малых х потенциальная
246Колебания и волны
энергия имеет вид
т.е. при малых отклонениях от устойчивого равновесия система со-
совершает гармонические колебания. Потенциальную энергию колеба-
колебательной системы принято отсчитывать от положения устойчивого
равновесия (Еп = 0 при х = 0). Обобщенная сила Fx = —dEn/dx при
малых х пропорциональна смещению: Fx = — хх. (Если х — линейная
координата, то обобщенная сила — проекция силы на направление
смещения; если х — угол отклонения, то х — вращательный момент.)
Если механическая система представляет собой материальную
точку или поступательно движущееся тело, то кинетическая энергия
имеет вид Ек = у mi2. Уравнение движения
тх = —хх G)
имеет такой же вид, как для груза на пружине. Поэтому действу-
действующую на тело возвращающую (т.е. направленную в сторону поло-
положения равновесия) силу называют при малых х квазиупругой силой:
Fx = —хх, а коэффициент х — эффективной жесткостью. Цикличе-
Циклическая частота и период колебаний имеют вид:
Точка совершает гармонические колебания: х = Acos(wt + <pQ), а ее
кинетическая и потенциальная энергии — гармонические колебания
с частотой 2ш:
Ек = Еsin2(LJt + <pQ) = \E[l - cos{2ujt + 2p0)],
En = Ecos2{ut + (pQ) =
где E = \тш2А2 = \xA2 — полная механическая энергия, которая
пропорциональна квадрату амплитуды. Средняя кинетическая энер-
энергия равна средней потенциальной энергии.
Пример 1. Потенциальная энергия жидкости в U-образной трубке (рис. 47)
при смещении жидкости на х увеличивается на Amgx = (pSx)gx = BpgS)xy2 (p —
плотность жидкости, S — сечение трубки), а кинетическая энергия равна тх2/2.
Значит, циклическая частота колебаний равна ш = yJipgSjm.
Пример 2. В одной из «дорезерфордовских» моделей атома водорода по-
положительный заряд предполагался равномерно распределенным по шару радиу-
радиусом Я, равным радиусу атома, а электрон располагался в центре шара. Найдем
частоту колебаний электрона при смещении его из положения равновесия. Сила
притяжения при смещении на г равна Fr = —ke2r/R3 (см. разд. 3.4), поэтому
при смещении на г < Я будут происходить гармонические колебания с частотой
4.2. Свободные незатухающие колебания
247
Рис. 47.
Рис. 48.
Пример 3. Физический маятник. Физическим маятником называется
твердое тело с горизонтальной неподвижной осью вращения, не проходящей
через его центр масс. При отклонении маятника от положения равновесия на
малый угол а (рис. 48) возникает момент силы тяжести, равный М = — mgdsin a
(d— расстояние от центра масс до оси вращения), стремящийся вернуть тело в
положение равновесия. Уравнение вращательного движения твердого тела имеет
вид: 1ф = — mgdsin а, где I — момент инерции тела относительно оси вращения.
При малых углах отклонения а < 1 это уравнение превращается в уравнение
гармонических колебаний относительно угла у. ф + (mgd/I)tp = 0. Циклическая
частота и период колебаний .маятника равны
Например, для однородного стержня длиной I, подвешенного за один из своих
концов, получим I — ml2/3} d = //2, Т = .2тгу^2//Cр). Приведенной длиной L
физического маятника называется длина такого математического маятника,
период которого Т = 2ir^L/g равен периоду данного физического маятника:
1Г= If(md). (Для однородного стержня, подвешенного за конец, L = 2//3.) Точка,
находящаяся на расстоянии L от оси подвеса и лежащая на прямой, проходящей
через центр масс перпендикулярно оси подвеса, называется центром качаний.
Если подвесить тело на оси, проходящей через центр качаний параллельно
прежней оси, то период колебаний, а значит, и приведенная длина маятника не
изменятся.
Обобщенной силой в данном примере является момент силы тяжести. Частоту
можно определить и энергетическим методом, найдя зависимость потенциальной
энергии от угла отклонения: Еа = mgd(l — cos a) « mgda2/2. Для полной энергии
получим: Е = у/ф2 + -j-ra^cfa2, откуда находим частоту колебаний.
Гармонические колебания являются изохронными^ т.е. их период
не зависит от амплитуды. Дело в том, что в уравнении гармониче-
гармонических колебаний х + ух = 0 коэффициент 7 имеет размерность с, и
по соображениям размерности период не может зависеть ни от чего,
кроме 7- Колебания большой амплитуды перестают быть гармони-
гармоническими, а значит, и изохронными — возникает зависимость.пери-
зависимость.периода от амплитуды. Однако в некоторых специальных случай даже
малые колебания могут не быть изохронными. Это происходит тог-
тогда, когда в формуле F) для разложения ?"п по х вторая производная
248 Колебания и волны
обращается в нуль. Такая ситуация возникает, например, при откло-
отклонении груза, прикрепленного к середине недеформированной пружи-
пружины с закрепленными концами, в перпендикулярном пружине напра-
направлении. Потенциальная энергия при малых х пропорциональна ж4, и
уравнение движения имеет вид: х + ух3 = 0. Размерность у в этом
случае м"~2с~2, и период колебаний Т ~ у~112А" обратно пропорци-
пропорционален амплитуде.
> Колебательные системы с несколькими степенями свобо-
свободы. Если смещение системы из устойчивого положения равновесия
характеризуется N независимыми параметрами art, ..., xN) то при
произвольном малом начальном отклонении зависимость x^t) не бу-
будет гармоническим колебанием. Однако любое движение может быть
представлено в виде суммы N специальных движений, называемых
нормальными колебательными модами, в каждом из которых все xi
совершают гармонические колебания с некоторой циклической часто-
частотой, характеризующей данную моду. В общем случае все N частот
могут быть различными.
Пример 4. Связанные маятники. Рассмотрим два одинаковых матема-
математических маятника длиной /, грузы которых соединены недеформированной пру-
пружиной жесткостью к (рис. 49). Нормальные моды дан-
•?$$:%>\:>-fv¦-¦¦¦¦..¦¦.¦¦ :*"::^: ¦ чг¦ ¦¦¦"^: нои системы позволяет угадать симметрия системы.
Гармонические колебания возникают при: а) одинако-
одинаковом отклонении маятников в одну сторону (хх — х2)
и б) при одинаковом отклонении маятников в разные
/ / стороны (хх = — х2). В первом случае: и>х = \fg/h
во втором: ш2 = \/{д/1) + Bк/т). Если отклонить в
! ilQOQQQQji ТП сторону только первый маятник, что соответствует
начальным условиям (x1Q}x2Q) — D,0), то такое от-
Рис. 49. клонение можно представить в виде суммы двух нор-
нормальных отклонений: (-4,0) = (у-А, ~А) + {\А> ~\А)>
Это значит, что движение первого маятника будет совершаться по за-
закону: хх — yAcos^t) + \Acos(u>2t)i а второго маятника — по закону:
х2 = yAcosfct^i) — ^Асоъ(ш2г). Если к/т <? д/l, то частоты шх и и>2 будут близ-
близки: До; w шх ——-, и при наложении двух колебаний с близкими частотами будут
9/1
наблюдаться биения (см. разд. 4.1): через время Тб/2 = тг/Au; второй маятник
раскачается, а первый остановится, еще через такое же время энергия снова пе-
перейдет к первому маятнику, и т.д.
> Свободные колебания в электрическом
контуре. Колебательным контуром называет-
называется замкнутая цепь, состоящая из конденсато-
конденсатора емкостью С и катушки индуктивностью L
(рис. 50). Процессы в колебательном контуре,
как и в цепях переменного тока, исследуются в
области частот, где выполняется условие квази-
стационарности (см. разд. 3.14), т.е. ш -С с//,
Рис. 50. где / — характерные размеры системы (в этом
4.3. Затухающие и вынужденные колебания 249
приближении, в частности, можно не учитывать излучение контура).
Закон Ома для участка цепи, содержащего индуктивность, при вы-
выбранном правиле знаков для обхода контура и для заряда конденса-
конденсатора имеет вид: IR = (срг — <р2) +<?, где R — сопротивление проводов
и катушки. С учетом соотношений: I = q (верного при выбранных
знаках), q = (<p2 — Vij/R и f= —LI имеем IR = —{q/C) — LI. Отсюда
получим
Ь
Если сопротивление контура пренебрежимо мало (что соответствует
R -С у/L/C), то заряд на конденсаторе изменяется по гармоническому
закону q = qmcos(wt + <р0) с циклической частотой и периодом,
равными
ш = l/>/LCt T = 2тг\/1С. A0)
Ток в контуре изменяется по гармоническому закону с амплитудой
Im = ujqm с опережением по фазе на тг/2. Энергия контура
2 + 2С
переходит из электрической формы в магнитную и обратно: в момент
максимальной зарядки конденсатора она равна W = q^n/BC)) а когда
заряд конденсатора равен нулю, то W = LI^/2. Для зависимости
магнитной и электрической энергии от времени верны такие же
соотношения, как для кинетической и потенциальной энергий при
механических колебаниях.
4.3. Затухающие и вынужденные колебания
> Затухающие колебания. Если в колебательной системе проис-
происходят потери энергии, то амплитуда колебаний уменьшается со вре-
временем. Если потери энергии механических колебаний определяются
силой вязкого трения, которая при малых скоростях пропорциональ-
пропорциональна скорости, то уравнение движения та = —хх — bv приводится к
линейному дифференциальному уравнению
x + 2/?i + wjjs = 0, A1)
которое называется уравнением затухающих колебаний. Здесь
/3 = 6/Bт) — коэффициент затухания, и>0 — циклическая часто-
частота собственных колебаний в отсутствие затухания (при /3 —> 0).
Решение этого уравнения удобно искать в виде экспоненты:
х = Аехр(-7<0' Подставляя в A1), получим для 7 квадратное уравне-
уравнение: 72 — 2/?7 +^о = 0- Если /3 < и>0) то уравнение имеет два комплекс-
комплексно сопряженных решения: 7i 2 = Р ^ Wwl ~~ Р2> которые приводят к
250 Колебания и волны
одинаковым ответам, поэтому можно взять любое. Применяя форму-
формулу Эйлера (см. разд. 4.1), получим:
x(t) = Аое~* cos(ut + <р0), и = Vw02-/?2, A2)
где постоянные Ао и <pQ определяются начальными условиями.
Функция A2) принимает нулевое значение через равные проме-
промежутки времени Т = 2т:/и (рис. 51), поэтому w и Т условно называют
w частотой и периодом затухающих ко-
колебаний. Если /? «С w0, то на каждом
временном интервале Т <? т <? /?-1 ко-
колебания можно считать гармонически-
гармоническими, a A(t) = Лоехр(—j3t) имеет смысл
амплитуды колебаний на этом интер-
интервале. Поэтому A(t) называют (при лю-
Рис 51< бом /3 < и0) зависящей от време-
времени амплитудой затухающих колеба-
колебаний. Убывание амплитуды за период, равное A(t)/A(t + T) = ехр(/?Г),
называют декрементом затухания, а логарифм декремента
называют логарифмическим декрементом затухания. Величина
N = 1//? показывает, за сколько полных колебаний амплитуда умень-
уменьшается в е « 2,72 раз.
Если /3 > u>Q (сильное затухание), то квадратное уравнение для 7
имеет два действительных положительных корня: у1 2 =/?±\//?2 — и>$}
и общее решение
x(t) = A, exp(-7lt) + A2 exp(-72i) A4)
имеет неколебательный (ангармонический) характер (параметры
Аг, А2 определяются начальными условиями).
> Затухающие электрические колебания. Сравнивая уравне-
уравнение колебаний в электрическом контуре (9) с уравнением затухающих
колебаний (И), находим выражения для коэффициента затухания и
логарифмического декремента затухания:
"=#¦ л
Условие слабого затухания А <?С 1 имеет вид: R <? s/bJC (величи-
(величину sjL/C называют волновым сопротивлением контура).
4.3. Затухающие и вынужденные колебания
251
»> Вынужденные механические колебания. Движение системы
под воздействием внешней периодической силы называют вынужден-
вынужденными колебаниями, саму внешнюю силу называют вынуждающей си-
силой. Из уравнения движения та = —хх — bv + Fx(t) получим уравнение
вынужденных колебаний:
a?+ 2/?i + wj}a = /(<), A6)
где принято обозначение f(t) = Fx(t)/m.
Общее решение такого неоднородного (с отличной от нуля правой
частью) уравнения может быть представлено в виде суммы частного
(т.е. любого) решения неоднородного уравнения и общего решения
однородного уравнения. (Общее решение должно содержать свобод-
свободные параметры, позволяющие удовлетворить любым начальным усло-
условиям.) Однородное уравнение представляет собой уравнение затуха-
затухающих колебаний, его общее решение (формулы A2) и A4)) экспонен-
экспоненциально затухает за время г ~ 1//?. Затухание собственных колеба-
колебаний означает окончание переходного режима установления колебаний
и наступление режима установившихся вынужденных колебаний, ха-
характеристики которого определяются функцией f(t) и параметрами
/?, uQi но не зависят от начальных условий.
Частное решение уравнения A6) будем искать в виде установив-
установившихся колебаний. Так как любая периодическая сила Fx(t) может
быть разложена в ряд Фурье, Т9 естественно исследовать установив-
установившиеся вынужденные колебания под действием гармонической выну-
вынуждающей силы f(t) = Fx(t)/m = (F0/m) cos ut. Будем искать их в виде
гармонических колебаний такой же частоты, но со сдвигом по фазе:
х = Acos(Qt + ip). A7)
Подставляя A7) в уравнение, находим
А =
2/И1
A8)
Ai
0
0
—л
J
a
4
1
Q
Q
При fi = 0 получим <p = 0 и
A = Fo/(mcjo) = ^o/x> что соответствует
статическому смещению тела вслед за мед-
медленно меняющейся силой. При Q -> оо име-
ем А -» 0 и ^> -> —тт. Графики Л(О) и y?(fi) рис# 52.
приведены на рис. 52.
> Резонанс. Максимальное значение амплитуды установившихся
колебаний достигается при резонансной частоте 0р = \Д;2 — 2^2 =
и равно Лтах = Л@ ) = FQ/Bm/3<jj), где о; = у/ш$ - /?2 —
252
Колебания и волны
циклическая частота затухающих колебаний. При 0 <? ш0 зависи-
зависимость А(п) содержит резкий и узкий максимум при резонансной ча-
частоте, которая в этом пределе близка к собственной частоте колеба-
колебаний системы. Это явление называется резонансом, а кривые зависи-
зависимости A(Q)—резонансными кривыми. Характеристики максимумов
(при Р<&и0): отношение Атах к статическому отклонению А@) равно
и)/B/3) = тг/А (А — логарифмический декремент затухания; величину
Q = тг/А называют добротностью колебательной системы). Шири-
Ширина максимума на уровне Лтах/л/2 равна коэффициенту затухания:
Амплитуда установившихся колебаний скорости достигает мак-
максимального значения FQ/Bm/3) при П = и0. При резонансе колебания
скорости происходят в фазе с колебаниями возмущающей силы.
Рассмотрим процесс установления колебаний при частоте выну-
вынуждающей силы, равной резонансной частоте (предполагается, что
/3 <$С ш0). Если в начальный момент смещение и скорость точки равня-
равнялись нулю, то в рассматриваемом пределе начальным условиям удо-
удовлетворяет решение:
smut.
Полученная зависимость изображена на рис. 53. При t
амплитуда растет пропорционально времени: A(t) « Am
1//3
xk A
Рис. 53.
= FQt/Bmui); затухание на этом
этапе влияния не оказывает.
Отметим, что время установле-
установления колебаний велико по срав-
сравнению с периодом: 1//?^ 2тг/и).
Если частота О, близка к и\ но
отличается от нее, то движе-
движение на начальном этапе t <С 1//3
представляет собой сумму ко-
колебаний с близкими частота-
частотами. Если выполнено условие
и ^> |Г2 — о;| ^> 1//?, то в процессе установления колебаний происхо-
происходят явно выраженные биения (амплитуда колебаний возрастает почти
до 2Атах и уменьшается поч^и до нуля с периодом Гб = 2тг/|П — ш\).
Резонанс при произвольном периодическом воздействии. Если пери-
период внешнего воздействия Fx(t) кратен периоду собственных колебании системы
Т = 2тг/о/, то в разложении Fx(t) в ряд Фурье может присутствовать гармоника
с частотой ш. Если добротность колебательной системы велика, то под действи-
действием этой гармоники могут возникнуть гармонические колебания заметной ампли-
амплитуды. Например, для раскачивания качелей можно подталкивать их на каждом
размахе (тогда резонансную частоту будет иметь первая гармоника), можно —
через раз (будет работать вторая гармоника), и т.д.
4.3. Затухающие и вынужденные колебания
253
р> Вынужденные электрические колебания. Если в колебатель-
колебательный контур (см. разд. 4.2) включить переменную ЭДС %(t), то выну-
вынужденные колебания будут описываться таким же дифференциальным
уравнением, как и для механической системы:
A9)
Здесь q — заряд на конденсаторе, /3 = R/BL) —коэффициент зату-
затухания, ujq — l/y/LC — циклическая частота собственных колебаний
контура. Рассмотрим установившиеся колебания под действием гар-
гармонического воздействия $(t) — %Q cos Ш. Колебания заряда происхо-
происходят по закону q(t) = qQ сов(Ш + <р), где для амплитуды qQ и сдвига по
фазе <р верны выражения A8). Однако в электрической цепи интерес
представляют не колебания заряда, а колебания тока I = q, которые
происходят по закону / = I0cos(Qt — (рг) с амплитудой и сдвигом по
фазе, равными
Максимум амплитуды колебаний тока (резонанс) достигается при
значении Пр = и0 = 1/л/ЬС и равен /О@р) = %q/R- При резонансе
колебания тока происходят в фазе с колебаниями ЭДС.
Колебания напряжения на сопроти-
сопротивлении, конденсаторе и катушке ин-
индуктивности описываются следующи-
следующими формулами:
i Ur— inX,
Коэффициенты пропорциональности между амплитудами тока и
напряжения называют: хс = 1/(ЙС) — емкостным сопротивлением,
xL = ClL — индуктивным сопротивлением. Величину х = xL — xc на-
называют реактивным сопротивлением цепи, сопротивление R — ак-
активным сопротивлением (в том смысле, что только на нем рассеи-
рассеивается энергия), величину z = y/R2 + x2 — полным сопротивлением.
Формулу B0) можно переписать в виде: IQ = %Q/z, tg<Pi = x/R. Все
эти соотношения становятся очень наглядными при использовании
векторных диаграмм (рис. 54). При резонансе х = 0, т.е. колебания
напряжений на емкости и на индуктивности компенсируют друг дру-
друга и сопротивление цепи превращается в активное сопротивление R.
254 Колебания и волны
> Мсшщость на участке цепи. Действующим, или эффектив-
эффективным, значением переменного тока (напряжения, ЭДС) называется та-
такое значение постоянного тока, при котором на активном сопроти-
сопротивлении выделяется за период такое же количество теплоты, как при
переменном токе (т.е. среднеквадратичное за период значение):
I
т
о
Для синусоидального тока 1Д = /0/л/2, 1/д = U0/y/2. Если сдвиг фазы
между током и напряжением равен <р, то средняя за период мощность
равна
1 [т 1
р ~ / uQ cos(ut)I0 cos(ut - <p)dt = -jtUqIq cos tp = 1Д1/Д cos (p.
Для реактивного сопротивления средняя мощность равна нулю.
4.4. Упругие волны
> Основные определения. Если непрерывная среда обладает
упругими свойствами, то движение точек в одном месте среды (в ис-
источнике) приводит к распространению этого движения с определен-
определенной скоростью в ви^е упругой волны. Волновое движение среды опи-
описывают функцией ?(r,tf), задающей смещение частицы среды от рав-
равновесного положения г в момент времени t. (Частицей среды называ-
называют достаточно маленький макроскопический, т.е. содержащий боль-
большое число атомов и молекул, элемент среды.) Упругая волна может
распространяться в трехмерной среде, двухмерной среде (упругая
мембрана) и одномерной среде (упругий стержень, натянутая жест-
жесткая нить, столб воздуха). Простейший вид волны— плоская волна, в
которой функция ? = ?(x,t) меняется только в одном направлении и
зависит от координаты х. Если при этом вектор ? перпендикулярен
направлению распространения волны, то волна называется попереч-
поперечной, а если параллелен — продольной.
Среда называется однородной, если все ее точки эквивалентны,
изотропной, если в ней равноправны все направления, упругой, если
возникающие силы зависят только от смещения (деформации), линей-
линейной, если силы пропорциональны деформациям. В абсолютно упругой
среде механическая энергия волны не рассеивается (не превращается
во внутреннюю). Если среда обладает только объемной упругостью,
то в ней могут распространяться только продольные волны (жид-
(жидкость, газ), если она обладает также упругостью формы, то возмож-
возможны и поперечные (сдвиговые) волны. В линейной среде распростране-
распространение волн описывается линейными дифференциальными уравнениями,
4.4. Упругие волны 255
и осуществляется принцип суперпозиции'. если_^ва независимых ис-
источника вызывают две разных волны ^(fjt) и ?2(^*)> то совместное
действие источников вызовет волну ?(r,t) = ?(f,t) -f ?*2(^*)- Такое
же утверждение верно и для одного источника, движение которого
можно разложить на два движения. Поскольку любую функцию вре-
времени можно представить в виде интеграла Фурье по гармоническим
функциям, то волновое движение линейной среды можно разложить
на гармонические волны. Через произвольную точку гармонической
волны можно провести единственную поверхность постоянной фазы,
которая называется волновой поверхностью, или фронтом волны.
*> Уравнение плоской гармонической волны. Бели в источнике
смещение происходит по закону ?@,?) = ?mcosu;?, то в точках с
координатой х смещение происходит по такому же закону, но с
запаздыванием на x/v, где v — скорость распространения волны:
tmcos(Ut-kx). B1)
Здесь \ = 2ttv/lj=zvT — длина волны, Ar =ra;/t; = 2тг/А — волновое число.
Длина волны представляет собой пространственный период профиля
гармонической волны; точки, отстоящие на длину волны, совершают
синхронные колебания (разность фаз А<р = 2тг), разность фаз между
произвольными точками равна А(р = 2тг(#2 — #i)/A. В уравнении B1)
предполагается, что потери энергии на расстоянии х пренебрежимо
малы; небольшое рассеивание энергии можно учесть эмпирически,
введя в B1) множитель ехр(—ух), где 7 — коэффициент затухания
волны. Если ввести волновой вектор k, направленный перпендикуляр-
перпендикулярно фронту волны в сторону ее распространения, то B1) принимает
вид, инвариантный по отношению к выбору системы координат:
?(f,t) = ?mcosM-br), |(г,0 = ?те'И-И. B2)
Последняя форма записи уравнения бегущей волны использует фор-
формулу Эйлера; физический смысл имеет только действительная часть
Re?. Если скорость волны не зависит от частоты (отсутствует дис-
дисперсия), то плоское волновое возмущение любой формы распростра-
распространяется без искажения формы.
> Сферические и цилиндрические расходящиеся волны.
Если волна распространяется от точечного (сферического) или ли-
линейного (цилиндрического) источника изотропно по всем направле-
направлениям, то волновые поверхности будут иметь соответственно фор-
форму сфер или круговых цилиндров. В этих случаях уравнения рас-
256 Колебания и волны
ходящихся волн в отсутствие потерь энергии имеют следующий вид:
?(r, t) — — cos(wt — кг) (сферическая волна),
г
cos(wt — kit) (цилиндрическая волна),
-Jo
где г = у/х2 + у2 + z2) 72. = \Jx2 + у2. Убывание амплитуды проис-
происходит вследствие возрастания площади волновой поверхности; закон
сохранения энергии требует, чтобы потеха энергии оставался посто-
постоянным (напомним, что энергия колебаний пропорциональна квадрату
амплитуды; также см. ниже).
> Волновое уравнение. Непосредственной подстановкой можно
убедиться, что смещение гармонической волны ?(r,t) удовлетворяет
уравнению
или
33 или Д^
дх2 + ду2 + dz2 " v2 dt2' ^~ v2 dt2'
которое называется волновым уравнением. Если скорость гармони-
гармонической волны не зависит от частоты (зависимость и от к является
линейной, т.е. отсутствует дисперсия), то такому же уравнению удо-
удовлетворяет любая суперпозиция плоских волн. Верно также и обрат-
обратное утверждение: если уравнение движения частицы среды удалось
привести к B3), то волновые возмущения данной среды распростра-
распространяются со скоростью v.
В одномерном случае общее решение уравнения B3) имеет вид
? = /x(*-t;0 + /2(* + t;t), B4)
где Д и /2 — произвольные (дифференцируемые) функции. Первое
слагаемое описывает распространение плоского сигнала Д(ж) со
скоростью v без изменения формы в направлении положительных х)
а второе слагаемое — распространение сигнала /2(#) со скоростью v
в направлении отрицательных х.
Пример 1. Упругий стержень. Силы, возникающие при продольных
упругих деформациях стержня, подчиняются закону Гука: а = Ее, где а = F/S —
напряжение в данной точке стержня (среды), е — (относительная) деформация
Д///, Е — модуль Юнга. Деформация в точке с координатой х выражается через
t(x + dx)i(x) di
частную производную: е = — —~ « . Сила, действующая на частицу
dx дх
среды размером Ах и массой Am = pAxS, равна <т(х + Ах) — о(х). Уравнение
движения частицы среды имеет вид:
дх2 Е dt2 '
Значит, скорость распространения волн в упругом стержне равна v = yEjp. С
такой же скоростью распространяется продольная волна в упругой среде.
4.4. Упругие волны 257
Пример 2. Натянутая струна. По струне, сила натяжения которой рав-
равна Т, может распространяться поперечная волна. Пусть профиль струны в дан-
данный момент задается функцией ?(x,t). Получим уравнение движения частицы
среды размером Ах в предположении «плавной» волны: д?/дх <& 1. Вертикальная
проекция силы натяжения равна F±(x) = Tsina « Т(д(/дх) (а — угол наклона
струны); вертикальная сила, действующая на частицу среды размером Ах и мас-
массой Am = рхАх 5, равна F±(x -f Ах) — F±(x) (рг —линейная плотность струны).
Уравнение движения частицы среды имеет вид
дЧ "= Pl d2j
дх2 т dt2 '
Значит, скорость распространения волн в упругом стержне равна v = л/Т/р±.
Пример 3. Воздушный столб в цилиндре. Объемная упругость газа
(или любой термодинамически простой среды) характеризуется объемным мо-
модулем упругости К = — V(dp/dV) = р(др/др). Значение К зависит от условий,
при которых происходит объемная деформация газа. Для звуковых колебаний
(*/ > 16 Гц) можно пренебречь теплообменом между разными частицами сре-
среды и считать К адиабатическим модулем упругости: А'ад = — Vydp/dVj . Из-
Изменение давления в данной точке цилиндра равно (при малых деформациях)
Ар(х) = — K(dV/V) = — А (Э?/#ж); сила, действующая на частицу воздушной среды
размером Да; и массой Am = р Ах 5, равна AF = [Ар(х) — Ар(х-f Да:)]5. Уравнение
движения частицы среды имеет вид
дЧ р d2t
дх2 К dt2 '
Значит, скорость распространения волн в воздушном цилиндре равна v = \jKjp =
= yjdp/dp. (Эти выражения верны для любой термодинамически простой среды:
для реального газа, для жидкости.) Для звуковых волн в идеальном газе получим:
К = 7Р» у = \jivlР = y/lRT/ц, где 7 — показатель адиабаты (см. разд. 2.2).
> Объемная плотность энергии. Плотность потока энергии.
Плотности кинетической и потенциальной энергии в данной точке
плоской упругой продольной волны:
?\2
Для бегущей волны произвольной формы ? = f(x ± vt) выполняется
соотношение {d?/dtJ = v2(d?/dxJ. Учитывая, что для упругой
продольной волны v2 = Е/р, получим, что плотности кинетической
и потенциальной энергии в каждой точке бегущей волны равны друг
другу. Это утверждение верно для бегущей волны любой природы. В
случае гармонической плоской волны B1) объемная энергия волны и
ее среднее по времени значение имеют вид:
и; = wK + wn = pu2t?m sin2(w* - kx), (w) = \pu>2gn.
Плотность потока энергии [вектор Умова) в: данной точке бегу-
бегущей волны равна
if = wu, B5)
9 А. Д. Полянин, В. Д. Полянин и др.
258 Колебания pi волны
где и — скорость переноса энергии. Для без дисперсионной среды
и = v) где V—, скорость распространения волны, входящая в волно-
волновое уравнение B4). Для гармонической бегущей волны B1) и = v) где
v — фазовая скорость волны: v = и/к. Энергия, переносимая бегущей
волной через площадку ds за, единицу времени (поток энергии), равна
с1Ф = и • ds. Модуль среднего по времени значения модуля вектора
Умова (его иногда называют интенсивностью волны) для гармони-
гармонической плоской волны равен / = \(и)\ = v(w) = -jPVU}2^m- ^ случае
произвольной (в том числе стоячей) продольной упругой волны мож-
можно использовать выражение для и через мощность упругих сил (на
единицу площади):
4
где <т = Е д^/дх — напряжение в данной точке среды (см. пример 1).
Для поперечной волны в струне (пример 2) поток энергии имеет
аналогичный вид:
1 at ~ дх dt'
> Дисперсия. Групповая скорость. Зависимость скорости гар-
гармонической волны от частоты или длины волны называется диспе-
дисперсией, а среда, в которой наблюдается это явление, называется дис-
диспергирующей. В диспергирующей среде несинусоидальный бегущий
импульс меняет свою форму в процессе движения, поскольку гармо-
гармонические волны, входящие в его разложение Фурье, перемещаются с
разной скоростью. Скорость переноса энергии, входящая в выраже-
выражение B5) для вектора Умова, определяется в этом случае как скорость
движения центра импульса (или как скорость точки, в которой де-
деформация максимальна) и называется групповой скоростью волно-
волнового пакета (в отличие от фазовой скорости синусоидальной волны
v — и/к). Конечный импульс размером Ах называют волновым па-
пакетом по той причине, что в его разложение в интеграл Фурье по
гармоническим волнам входит конечная группа волн, спектральная
ширина которой определяется соотношением: Ах ¦ Ak ~ 1. Групповая
скорость такого импульса равна
du л dv , ч
u*> = !k=v-x!x' ^ B6)
где v =uj/k — фазовая скорость волны. Понятием групповой скорости
волнового пакета можно пользоваться только в том случае, если
его спектральная ширина столь мала, что зависимость и (к) можно
считать линейной.
Для иллюстрации рассмотрим волну, являющуюся суперпозицией всего двух
бегущих волн близких частот и одинаковой амплитуды:
( = Cm cos[(w + bw)t - (к f Ak)x] + ?т cos[(w - &u)t -(к- Ак)х] =
= 2?w cos(Au; t - Ak x) cos(wt - kx).
4.4. Упругие волны 259
Видно, что огибающая волн имеет пространственный период Да: = 2тг/Ак и
перемещается со скоростью г* = Аш/Ак.
р> Интерференция волн. Две волны называются когерентными,
если в любой точке пространства они создают когерентные колеба-
колебания, разность фаз которых не меняется со временем (см. разд. 4.1).
Источники когерентных волн называются когерентными источни-
источниками. При сложении некогерентных волн средняя но времени энергия
результирующего колебания равна сумме их средних энергий. При
сложении когерентных волн, колебания частиц в которых происхо-
происходят в одном или близких направлениях, может наблюдаться явление
интерференции, т.е. устойчивое во времени ослабление колебаний в
одних точках пространства и усиление в других. Если точка нахо-
находится на расстоянии гг от одного из когерентных источников и на
расстоянии г2 --¦ от другого, то разность фаз между колебаниями в
этой точке равна
•у» —, р А
А<р = (<р]0 - kr} ).г_- (<р20 - kr2) = 2тг-^у-^ - (>20 ~ у?ю) = 2тгу - А<р0.
Здесь А<р0 разность фаз между колебаниями источников,
Д = (г2--гj) ¦¦-•- разность года во.т. Условие максимума результирую-
результирующих колебаний: А<р -¦- ±2тп, условие минимума ,\р ~ ±2я(т — ~),
где га -порядок интерференционного максимума (минимума). В слу-
случае синфазных источников {A<f 0 = 0) эти условии принимают особен-
особенно простой вид:
Д = zhmA (максимум), А = ±(т — -| )А (минимум).
Пример 4. Рассмотрим два линейных когерентных ис-
источника цилиндрических волн, которые находятся на рас-
расстоянии А/2 друг от друга. В точках, расположенных вдали
от источников, разность хода волн определяется только на-
направлением излучения и равна А = у A cos 6 (рис. 55). В слу-
случае синфазных источников излучение ослаблено в направле-
направлении 0 = 0 и усилено в направлении в = тг/2, а в случае истом-
ников, совершающих колебания в противофазе (А^о ~ 7Г)? ~~
наоборот. рис# 55#
> Стоячие волны. Собственные колебания. Важным приме-
примером интерференции является стоячая волна, возникающая при сло-
сложении двух одинаковых плоских бегущих волн, распространяющихся
навстречу друг другу:
? = ?m cos(c<^ — kx) + fm cos(ujt -f kx) = 2fm cos fea: coscj^. B7)
Амплитуда колебаний точек волны А(х) = 2Л cos fear периодически ме-
меняется от нуля (в узлах волны) до 2А (в пучностях волны). Рас-
Расстояние между соседними узлами равно А/2. Колебания точек меж-
ДУ двумя узлами происходят в фазе, но по разные стороны узла —-
260Колебания и волны
Рис. 56.
в протйвофазе. В узлах равна нулю амплитуда колебаний скорости,
но максимальное значение имеет амплитуда колебаний деформации
д?/дх. В пучностях, наоборот, отсутствуют деформации, но с мак-
максимальной амплитудой происходят колебания скорости. Средняя по
времени энергия имеет одинаковое значение во всех точках стоячей
волны. Вектор Умова равен нулю как в узлах, так и в пучностях, а в
промежуточных точках периодически меняет свое направление.
Если конец стержня, совершающего колебательное движение,
жестко закреплен, то смещение точек конца стержня равно нулю; если
конец стержня свободен, то равна нулю деформация. В первом случае
граничное условие имеет вид ^|а.=0 = 0, а во втором — d?/dx\xz=0 = О,
где значение х = О соответствует концу стержня. (Такие же условия
возникают для колебаний воздуха в цилиндрической трубке в случае
закрытого или открытого конца трубки. Для поперечных колебаний
натянутой струны из примера 2 возможен только первый вариант,
когда конец струны закреплен.) Если все точки конечного стержня
совершают гармонические колебания с одной частотой, то такое дви-
движение называют собственными колебаниями стержня. Если сделать
мысленный разрез бесконечно длинного стержня в том месте, где
находится узел стоячей волны, то будет удовлетворяться граничное
условие для закрепленного конца, а если в том месте, где пучность, —
то для свободного. Значит, свободные колебания стержня длиной I в
случае двух свободных или двух закрепленных концов должны удо-
удовлетворять условию I = утА, или шт — 7rmv/l (спектр собственных
колебаний, т = 1, 2, ...), а в случае одного закрепленного конца —
условию I = \{т - -|-)А, или ит = тг(т - \)v/l. Собственное коле-
колебание с наинизшей частотой называется основным колебанием^ все
остальные собственные колебания — обертонами или гармониками.
> Отражение бегущей волны. Рассмотрим отражение бегущего
импульса от конца стержня. Если конец стержня закреплен, то гра-
граничному условию ?|д.=0 = 0 и начальным условиям (один набегающий
4.5. Электромагнитные волны
261
импульс) удовлетворяет суперпозиция набегающего импульса и точно
такого же по форме бегущего ему навстречу импульса, в котором сме-
смещения точек имеют противоположное направление (рис. 56, а). Если
же конец стержня свободен, то граничному условию д?/дх\х=0 = О
удовлетворяет бегущий навстречу импульс смещений такого же зна-
знака (рис. 56, б). В случае бегущей волны отражение от свободного
конца происходит без изменения фазы, при этом образуется стоячая
волна с пучностью на конце стержня. Отражение от закрепленного
конца происходит с изменением фазы на 7Г, при этом образуется сто-
стоячая волна с узлом на конце стержня.
Рис. 57.
> Эффект Доплера в акустике. При движении источника и (или)
приемника волн, если расстояние между ними изменяется, то реги-
регистрируемая частота отличается от излучаемой. Направим ось х от
приемника к источнику. Если источник излучает звук с частотой г/0
и движется вдоль оси х со скоростью v% (рис. 57), то расстояние меж-
между соседними максимумами волны, распространяющейся вдоль х со
скоростью V-ынаправлении приемника, будет равно А = vTQ + v%TQ) a
ее частота равна v/X:
, = ,о^. B8)
X
Если приемник неподвижен, то он зарегистрирует именно эту часто-
частоту. Если приемник движется со скоростью г>", то интервал времени
между приходом соседних максимумов равен V = A/(v + i?), а часто-
частота принимаемого Сигнала равна 1/Т":
i = V12L!^ = yo^LX B9)
Эффект Доплера наблюдается в том случае, когда изменяется рас-
расстояние между источником и приемником.
4.5. Электромагнитные волны
> Свойства электромагнитных волн. Электромагнитной вол-
волной называется распространение возмущений электромагнитного по-
поля в пустом пространстве или в среде в отсутствие источников. Суще-
Существование электромагнитных волн следует из теории Максвелла (см.
262 Колебания и волны
разд. 3.15), в которой утверждается, что переменное электрическое
поле порождает переменное магнитное поле, а переменное магнитное
поле порождает переменное электрическое поле. В случае однородной
изотропной среды уравнения Максвелла имеют вид
1) rot? = -_ 2) roti?:=—, {щ
где D — ее0 Е, В = fifion . Для электромагнитного поля, зависящего
только от координаты ж, получаем уравнения:
дН, д_Е^
8х Ul UX /qi\
F1)
U?jy ^ UUZ UTjz ^ иli у
В этом случае уравнения для продольных компонент имеют вид
дЕх/дх = 5ЬЛГ/3^ = 0, dHJdx = dHJdt = 0, т.е. все продольные
компоненты ноля являются постоянными величинами.
Нетрудно убедиться, что поперечные компоненты электромагнит-
электромагнитного поля подчиняются волновому уравнению:
АНЖ =
(таким же уравнениям подчиняются Ez ж Ну).Ш этих уравнений сле-
следует, что электромагнитные возмущения в среде распространяются
со скоростью
^ 4 ^ C2)
где с = 1/у/€0^0 « 3 • 108 м/с ~ скорость электромагнитных волн в
вакууме, ап = ^/?/7—показатель преломления среды.
Рассмотрим плоскую электромагнитную волну определенной ча-
частоты (монохроматическую плоскую волну), распространяющуюся
вдоль оси х: Еу = ЕОу cos(ut ->kx), Ez = EOz cos(ut -kx + <p). Из C1)
получаем: Ну = -у/еео/ц/АоЕя, Hz = \/еео/АФо &y ^з этих формул
можно получить свойства плоской бегущей электромагнитной волны:
1) Электромагнитная волна поперечна.
2) Так как Ё Ё - 0, то Ё 1 Й. Векторы (Ё9 Й, к) образуют
правую тройку векторов (т.е. направление вектора Е х Я совпадает
с направлением распространения волны).
3) Величины векторов Е и п в каждый момент времени связаны
соотношением у/ёё^Е = у/ЩГ^Н (Е = vB).
4.5. Электромагнитные волны 263
От разности фаз (р зависит характер поляризации волны. При
<р^=±ттг волна оказывается плоскополяризованной, т.е. вектор Е со-
совершает колебания в одной плоскости (эту плоскость называют плос-
плоскостью поляризации волны), а при иной разности фаз — эллиптиче-
эллиптически поляризованной или (при <р = ±(т 4- у)тг и при ЕОх = ЕОу) —
поляризованной по кругу (см. разд. 4.1).
р> Энергия электромагнитных волн. Объемная плотность энер-
энергии электромагнитной волны вычисляется по формуле
w =
В случае монохроматической плоскополяризованной волны имеем
u; = ee0?ocos2M " **)> (w) = ieeoEl
Для эллиптически поляризованной волны:
Для волны, поляризованной по кругу (EQy = EOz — EQi
(р = у 7г±тгт), плотность энергии не меняется со временем: w = ее0Е%.
Плотность потока энергии в электромагнитной волне определяет-
определяется вектором Пойнтинга (см. разд. 3.15):
= wv=
который направлен в сторону распространения волны. Интенсивно-
Интенсивностью электромагнитной волны называется модуль среднего по вре-
времени вектора Пойнтинга:
> Давление волны. В соответствии с теорией относительности,
поток энергии электромагнитного поля в вакууме означает существо-
существование импульса электромагнитного поля. Объемная плотность им-
импульса электромагнитного поля равна (по модулю) w/c, поток им-
импульса равен 5»/с, его модуль равен w. При отражении или поглоще-
поглощении волны происходит изменение импульса волны, что должно про-
проявляться в давлении волны на препятствие. При нормальном отра-
отражении плоской волны давление равно р = (w)(l + R), где R — доля
отраженной энергии (коэффициент отражения). В рамках электро-
электродинамики давление волны объясняется действием магнитного поля
волны на ток, возбуждаемый на отражающей поверхности электри-
электрическим полем волны.
264
Колебания и волны
/
т
1
1/
/
d
/
/
У
Рис. 58.
> Излучение плоского тока. Простейшим примером систе-
системы, создающей переменные поля и излучающей плоскую элек-
электромагнитную волну, является переменный
по времени плоский ток. Рассмотрим ток
в плоскости (я, z)) направленный вдоль z
и изменяющийся по закону гг =i0cosut
(рис. 58). Из закона плоского тока для уз-
узкого контура, охватывающего ток, получим
Вх@^) = ±y/i0i0coswt, где знак «—» соот-
соответствует полю справа от плоскости (для
малых у > 0), знак «+» — слева от плоско-
плоскости. Используя связь между Е и В в плос-
плоской волне, получим J5z@, t) = — АЕ coswt, где
АЕ = y/ioC2o = го/B^ос)- Электрическое по-
поле направлено против тока, его работа над
током отрицательна, т.е. ток отдает волне
энергию. Поле вдали от плоскости имеет вид Е(у, t) = —АЕ cos(ut—ky)
при у > 0 и Е(у, t) = -AE cos(ut + ку) при у < 0.
> Излучение волн движущимися зарядами. Излучение элек-
электромагнитных волн происходит при движении зарядов с ускорени-
ускорением. Простейшая излучающая система — электрический диполь, ди-
польный момент которого быстро меняется со временем {осцилля-
тор) или вибратор Герца). Так как электромагнитные возмущения
распространяются со скоростью v — c/y/eofiO) то поле излучения на
расстоянии г в момент времени t определяется движением зарядов в
диполе в момент t' = t — r/v. Поле излучения выглядит достаточно
просто только в волновой зоне, т.е. на расстояниях, больших как по
сравнению с размерами диполя, так и по сравнению с А = иг, где г —
характерное время изменения дипольного момента (в случае гармо-
гармонических колебаний А — длина волны). Электри-
Электрическое и магнитное поле в волновой зоне перпен-
перпендикулярны радиусу-вектору г, проведенному от
диполя к точке наблюдения:
¦[(pxf)x
lt-r/v'
¦^
47rt;r2 U"^ 'Jt-r/t/'
Рис* 59* Взаимное расположение векторов I, Я и г
изображено на рис. 59. Убывание полей с расстоянием происходит по
закону 1/г. Вектор Пойнтинга в волновой зоне направлен вдоль г; в
направлении, составляющем угол в с вектором р, он равен:
sin2 в , ». ч 2
4ти;3г2
4.5. Электромагнитные волны 265
Поток энергии через замкнутую поверхность есть не что иное, как
мощность излучения диполя:
Р = [ SFJ7rr2 sin6d6 = ——
Jo 4тгее
Считая, что движется только один из зарядов диполя, получим
формулу для мощности излучения ускоренно движущейся частицы:
Р~
которая оказывается пропорциональной квадрату ее ускорения.
Линейным гармоническим осциллятором называется электриче-
электрический диполь, момент которого изменяется по гармоническому зако-
закону: р = pQ cos ut. Зависимость интенсивности излученной волны от
угла в имеет вид
Зависимость 1F) дри г = const (диаграмма направленности)
изображена на (рис. 60). Средняя по времени мощность излучения
такого осциллятора ; q
" * iff- <34)
пропорциональна четвертой степени его " Ро
частоты. РИС. 60.
Пример 1. Свободный электрон в поле плоской электромагнитной волны с
амплитудой Ео совершает вынужденные колебания с амплитудой А = еЕ0/(тш2)
(уравнение движения электрона имеет вид: т'х = — еЕ0 co&uit). Видно, что мощ-
мощность излучения свободного электрона в поле электромагнитной волны не зависит
от частоты, а сечение рассеяния (отношение мощности излучения к интенсивно-
Р 8 (ке2J _зо 2 тт
сти падающей волны) равно а = — = ^~Т~~Г ~ ^ м • ДРУгая ситуация
I 3 тпгс*
возникает, когда в поле электромагнитной волны попадает атомный электрон,
собственная частота о/0 колебаний которого велика по сравнению с частотой па-
падающей (световой) волны. Амплитуда колебаний в этом случае (см. разд. 4.3)
равна А = еЕ^Ктпи^), т.е. почти не зависит от ш. В этом случае мощность из-
излучения и сечение рассеяния света пропорциональны и>4, что дает качественное
объяснение голубому цвету неба (голубой свет рассеивается сильнее).
Пример 2. Если представить, что электрон в атоме совершает собствен-
собственные колебания с частотой и>0, то энергия колебаний равна W = тш2А2, а мощ-
dW ке2и%А2 _ dW ke2w\ rx,
ность излучения равна Р = ¦— = ¦* . Получаем = 5~*^»
dt Зс3 dt 3mc3
следовательно, энергия атома изменяется по закону W = Wq ехр(—*/т), где
т = 3mc3/(fce2w2) ~ 10"9 Ч- Ю"8 с называют временем высвечивания атома.
> Эффект Доплера для электромагнитных волн в вакууме.
Главное отличие от акустического эффекта Доплера (см. разд. 4.4) со-
266 Колебания и волны
стоит в том, что отсутствует система отсчета, связанная со средой,
по которой распространяется волна. Поэтому соотношение между ча-
частотой излучения у0 (измеренной в системе отсчета источника Ки) и
зарегистрированной частотой и (измеренной в системе отсчета при-
приемника Кп) может зависеть только от их относительной скорости.
Пусть в Кп источник движется со скоростью v, направленной под
углом в к радиусу-вектору, проведенному от приемника к источни-
источнику. Повторяя рассуждения, приведенные в разд. 4.4, получим
v =
1 + (v/c) cos в '
где v0 — частота источника, измеренная часами системы Кп. Йере-
ходя к собственному времени (То = 7^0» или ^о = ^о/т* см- раЗД- 1-И)>
получим
=
(«/c)cosfl] 1 +(v/c) сов в'
Видно, что вследствие преобразования времени наблюдается не
только продольный, но и поперечный эффект Доплера (при движении
источника перпендикулярно направлению на приемник).
Полезно посмотреть на эффект Доплера
с иной точки зрения. Поскольку фаза коле-
колебания в данной точке волны (utt — kr) долж-
должна быть инвариантна по отношению к пере-
переходу в другую систему отсчета, то (к,и>/с)
представляет собой 4-вектор нулевой дли-
длины (к2 — и>2/с2 = 0). Если в системе А'п
ось х направить параллельно скорости источ-
источника гТи (рис. 61), то в этой системе отсче-
отсчета кх = — к cos в = — (ш/с) cos в. Применяя для
перехода к системе КИ преобразования Ло-
Рис. 61. ренца, имеем^ ио/с = ч[{и/с) - kx(v/c)]t или
и>0 = */[и> -J- (jj(v/c) cos0]. Выражая и>} приходим
к C5). Этот метод позволяет, записав преобразования Лоренца для волнового
вектора ?, получить формулы для явления аберрации света, имеющего важное
значение в астрономии.
> Шкала электромагнитных волн. В зависимости от способов
излучения и регистрации электромагнитных волн, в шкале частот v
или длин волн в вакууме А = с/и выделяют несколько диапазонов с
условными (перекрывающимися) границами:
1. Радиоволны (А > 0,05 мм).
2. Оптическое (световое) излучение A0 нм < А < 1 мм):
а) инфракрасное (ИК) излучение G70 нм < А < 1 мм),
б) видимый свет C80 нм < А < 770 нм),
в) ультрафиолетовое (УФ) излучение A0 нм < А < 380 нм).
3. Рентгеновское излучение @,01 пм < А < 100 нм).
4. Гамма-излучение (гамма-лучи) (А < 0,1 нм).
5.1. Геометрическая оптика. Фотометрия 267
5. Оптика
5.1. Геометрическая оптика. Фотометрия
р> Основные законы геометрической оптики. Оптика занима-
занимается изучением электромагнитного излучения оптического (светово-
(светового) диапазона (см. разд. А.р) явлений, возникающих при его распро-
распространении в пространстве^ взаимодействии с веществом. Геометри-
Геометрическая оптика отвлекается от волнового характера и от поляризации
светового излучения, оперируя понятиями световых лучей, указыва-
указывающих направление распространения света, и узких световых пучков,
образованных световыми лучами.
Основные законы геометрической оптики перечислены ниже.
1. Закон прямолинейного распространения света.
. 2. Закон независимости световых пучков. Энергия в каждом
пучке распространяется независимо от других пучков; освещенность
поверхности, на которую падает несколько пучков, равна сумме
освещенностей, создаваемых каждым пучком в отдельности.
3. Закон отражения света. Отраженный луч лежит в плоскости
падения, образуемой падающим лучом и нормалью к поверхности
в точке падения; угол падения равен углу отражения. Все углы
отсчитываются от нормали.
4. Закон преломления света. Преломленный луч лежит в плоско-
плоскости падения; отношение синуса угла падения ах к синусу угла пре-
преломления а2 зависит от длины волны, но не зависит от угла падения
(закон Снеллиуса):
^-=п21 = ^-. A)
sina2 nx
Постоянная величина п21 называется относительным показателем
преломления второй среды относительно первой, который равен от-
отношению (абсолютных) показателей преломления каждой из сред
(показателей преломления среды относительно вакуума). С точки
зрения волновой оптики показатель преломления указывает, во сколь-
сколько раз фазовая скорость световой волны данной частоты меньше, чем
скорость этой волны в вакууме:
с
v = —, n = JJIe « л/е B)
п
(см. разд. 4.5). Если п2 < пх, то при at >апред, где sinanpefl = п21 < 1,
наблюдается полное отражение света, т.е. отсутствует преломлен-
преломленный луч. При распространении луча света в среде с постепенно ме-
меняющимся вдоль некоторой оси показателем преломления (в слоистой
среде) удобно использовать формулу A) в виде nsina ~ const, где
о угол с указанной осью. Видно, что а постепенно меняется, т.е.
происходит искривление луча.
268 Оптика
К перечисленным законам геометрической оптики следует доба-
добавить принцип обратимости световъЬс пучков.
Законы геометрической оптики действуют тогда, когда оказыва-
оказываются несущественными явления интерференции, дифракции и поля-
поляризации. Это происходит в тех случаях, когда амплитуда волны и ее
первые пространственные производные мало меняются на длине вол-
волны. Эти условия нарушаются на границе тени, вблизи геометрической
точки схождения лучей (фокуса), при прохождении света через узкие
диафрагмы, при распространении света в средах с резко меняющим-
меняющимся показателем преломления или с большим поглощением. Например,
при прохождении света через диафрагму с минимальным размером d
пучок света расплывается за счет дифракции на расстоянии / ~ d?/\\
на расстояниях, малых по сравнению с /, можно пользоваться закона-
законами геометрической оптики.
С законами геометрической оптики тесно связаны принцип Гюй-
Гюйгенса (волновое построение Гюйгенса) и принцип Ферма. Принцип
Гюйгенса опирается на абстрактно-волновые представления и позво-
позволяет построить в каждой точке вспомогательную волновую поверх-
поверхность, нормаль к которой указывает направление луча света. Для
построения волновой поверхности в момент времени t + At все точ-
точки волновой поверхности в момент времени t рассматриваются как
источники вторичных световых волн. Огибающая сферических врл-
новь!х поверхностей вторичных волн образует новую волновую по-
поверхность основной волны.
Принцип Ферма является одним из примеров вариационных прин-
принципов, играющих в физике большую роль. Он утверждает, что вре-
время распространения света по истинной траектории является экстре-
экстремальным (обычно — минимальным или максимальным) по сравнению
со всеми воображаемыми близлежащими траекториями. Более точ-
точно — это время не меняется (в первом порядке малости) при малом
искажении траектории. Время прохождения света через среду с пере-
переменным (или кусочно-переменным) показателем преломления удобно
выражать через оптическую длину пути L:
t= /24" = -, L= fndl C)
J\ с/п с Jx w
Это понятие оказывается полезным и при изучении интерференции.
Принципы Гюйгенса и Ферма позволяют получить основные законы
геометрической оптики, но не позволяют выйти за- ее пределы.
Одной из важных задач геометрической оптики является постро-
построение изображений, формируемых оптическими системами, и изуче-
изучение их свойств. Изображением называется точка схождения лучей,
прошедших оптическую систему. Система отражающих и преломля-
преломляющих сферических (и плоских) поверхностей, перпендикулярных к
5.1. Геометрическая оптика. Фотометрия 269
некоторой оси, формирует изображение точечного источника луча-
лучами, падающими под малым углом к оси (параксиальное приближе-
приближение). Ось системы называют оптической осью) точку схождения па-
параллельного оси пучка лучей — фокусом системы; перпендикулярную
оси плоскость, проведенную в фокусе, — фокальной плоскостью. Тео-
Теоретический предел размеров изображения и разрешающей способно-
способности оптических систем определяется дифракцией света. Важное для
дальнейшего свойство изображений: оптические длины всех лучей от
источника до изображения одинаковы, т.е. оптическая система не из-
изменяет разности хода лучей.
р> Фотометрия. Излучение в данной точке пространства в данном
направлении характеризуется интенсивностью лучистого потока I:
dФ = I cos 9 dsdU, D)
где dФ — лучистый поток (энергия, переносимая в единицу времени
через площадку ds лучами, заключенными в телесном угле dCl); 9 —
угол между выделенным направлением и нормалью к площадке. Про-
Произведение cos 9 ds называется видимой величиной площадки в данном
направлении. Объемная плотность лучистой энергии и = dW/dV рав-
равна
ti =- I Idu. E)
В случае изотропного излучения и = 4тг//с. Интенсивность / и плот-
плотность и можно подвергнуть спектральному разложению по частотам
или длинам волн:
/•00 /-00 /-00
и - / uudv- \ uUJdu)= uxd\.
Jo Jo Jo
Приравнивая энергию, заключенную в соответствующих друг другу
спектральных интервалах, можно найти связь между различными
спектральными представлениями. Например, приравняв uvdv = ux d\)
с учетом А = с/г/ получим
ч„ = {с/и2)их.
Аналогично можно произвести разложение по двум взаимно перпен-
перпендикулярным поляризациям.
Определенные выше энергетические характеристики используют при объ-
объективном описании излучения. Фотометрические, или световые характеристи-
характеристики учитывают восприимчивость глаза к световому излучению. Лучистый поток
измеряют в ваттах, а соответствующую ему фотометрическую единицу называ-
называют световым потоком и измеряют в люменах (лм). Чтобы перейти к световому
потоку, надо лучистый поток умножить на световую эффективность г) (измеря-
(измеряется в лм/Вт), которая для длины волны Ао = 555 нм равна щ = 625 лм/Вт, а для
Других длин волн равна ?7о^/л» гДе ^л —кривая видности, или относительной
270 Оптика
спектральной чувствительно emu глаза (V(A) = 1 при Л = 555 нм и падает до
нуля при приближении к границам видимого диапазона). Для пересчета от про-
произвольного лучистого потока к световому потоку можно использовать формулу
Фсв = гH J ФхУхс[\. Аналогичным образом происходит пересчет от остальных
энергетических характеристик к световым и наоборот (например, от интенсив-
интенсивности излучения к интенсивности света).
Для характеристики точечного источника используют энергети-
энергетическую силу источника, определяемую как лучистый поток в данном
направлении в расчете на единичный телесный угол: с?Ф = J dQ. Све-
Световая характеристика -— сила света источника — определяется че-
через световой поток. Единица силы света кандела является основной
единицей СИ (лм = кандела х ср, где ср— стерадиан). Если не про-
происходит поглощения или рассеяния излучения, то на расстоянии г от
источника в том же направлении интенсивность излучения равна
Поток лучистой энергии, приходящийся на единицу площади осве-
освещаемой поверхности, называется энергетической освещенностью.
Соответствующая световая величина называется просто освещенно-
освещенностью и измеряется в люксах (лк). Если излучение точечного источ-
источника падает под углом 0 к нормали, то
Е = —T-COS0.
г2
Для протяженных источников, т.е. для излучающей поверхности,
вводят энергетическую яркость в данном направлении Вв (световая
характеристика :— яркость). Энергетическая сила источника, соот-
соответствующего площадке ds, равна
dJ = В9 cos 0 ds, или ёФ = Вв cos 6dsdQ, F)
где 0 —- угол между нормалью к излучающей поверхности и напра-
направлением излучения. Источникг у которого Вв не зависит от направле-
направления, называется ламбертовским источником. Ламбертовский источ-
источник любой формы кажется равномерно ярким (например, диск Луны
или Солнца). Энергетическая светимость R (световая характери-
характеристика — светимость) определяется как полный лучистый поток в
телесном угле 2тг в расчете на единицу площади излучающей поверх-
G)
Для .имбгртвского источника Н =: л*В.
5.2. Интерференция света 271
iO..
ds
/r
Рис. 62. Рис. 63.
Пример. Освещенность, создаваемая светящейся поверхностью S на не-
некотором участке освещаемой поверхности ds', равна сумме вкладов от всех
участков ds. Телесный угол, под которым ds' видна от ds, равен cos в'ds'/r2
(рис. 62). Для светового потока, посылаемого в этот телесный угол, имеем
Ве cos в ds(cos в' ds'/r2). Так как cosQds/r2 равен телесному углу сШ, под кото-
которым излучающий участок виден от точки освещения, то dE = Bq^osO' d?l.
Например, при освещении ламбертовским диском маленькой площадки, рас-
расположенной на оси диска и ориентированной перпендикулярно оси (рис. 63),
d?l = 2жъ\пв' dd', и после интегрирования получим Е = TrBsin 0О, где 0О — угол
полураствора конуса, под которым диск виден от освещаемой площадки.
5.2. Интерференция света
> Когерентность световых волн. При наложении световых
волн, обладающих очень высокой частотой колебаний, можно наблю-
наблюдать только усредненную по времени энергию колебаний, которую
характеризуют интенсивностью колебаний I — (Е2). При сложе-
сложении двух колебаний Е = Е\ + Е2 получим / = 1г + ^ + ^12 > гДе
/12 = 2{Ех- Е2) называют интерференционным членом. Если /12 = О,
то пучки света называют некогерентными. Волны, поляризованные
во взаимно перпендикулярных направлениях, всегда некогерентны.
Монохроматические волны являются когерентными только в том слу-
случае, если остается постоянной их разность фаз (т.е. их частоты со-
совпадают) и если они параллельно (или почти параллельно) поляризо-
поляризованы. При наложении таких волн
где А<р — разность фаз колебаний в данной точке. В частном случае
при 1г = /2 = /0 имеем / = 2/0A + cos A<p). Для синфазных колебаний:
/^Г /2) Для колебаний В противофазе: / = {\fl[— /T^2
> Интерференция двух волн. При наложении двух шюских_волн
E1=E1Qcos(LJt—k1-r) и Е2 = E20cos(ut—k2-r) получим А<р= (кг—к2)-г.
Поверхности постоянной разности фаз представляют собой плоско-
плоскости, перпендикулярные вектору (кх — к2). Расстояние между соседни-
соседними плоскостями с максимальной интенсивностью равно
А - 2тг _ 7Г _ А , v
1*У ~ *вЬ(а/2) ~ 2sin(a/2) ' [ >
272
Оптика
где а — угол между векторами кг я. к2. При малых а получим
Ах ~ А/а. Если в области перекрытия волн поставить плоский экран,
параллельный (кх — ?2), то на нем будут наблюдаться параллельные
чередующиеся темные и светлые полосы.
При наложении сферических волн от двух синфазных точечных
источников условие максимума интенсивности m-го порядка имеет
вид r2 — rl = тХ (это уравнение гиперболоида вращения с осью, про-
проходящей через источники). При размещении экрана параллельно этой
оси получим светлые и темные полосы в виде гипербол. Если рассто-
расстояние до экрана D велико по сравнению с расстоянием d между источ-
никами, то в центре экрана получим равно-
равноотстоящие почти параллельные полосы. Рас-
Расстояние между полосами будет такое же, как
в опыте Юнга, где интерференция создает-
создается двумя параллельными линейными источ-
никами когерентного света. Если х — рас-
расстояние от некоторой точки экрана до его
центра (рис. 64), то т\ = D2 + (х + d/2J, r\ = D2 + {х - d/2J, и
при d,x <& D получим для разности хода Д = гх — г2 « xd/D « ах,
где а « d/D — угол, под которым источник виден из центра экра-
экрана. Интенсивность меняется от 4/ при Д = ах = тХ до нуля при
Д = (ш + у)А. Расстояние между полосами равно Д# = А/а = XD/d.
Ha большом расстоянии от двух синфазных линейных источни-
источнирис# 64.
ков
d)
можно написать г2 —
dsin#, где в — угол
между нормалью к плоскости источников и направлением наблюде-
наблюдения интерференции {приближение Фраунгофера). Амплитуды коле-
колебаний в интерферирующих волнах можно считать одинаковыми, т.е.
/ = 2/o[l-fcos(fcdsin0)]. Максимумы интерференции наблюдаются под
углами, удовлетворяющими соотношению sin0 = mX/d.
> Интерференция большого числа волн.
Рассмотрим интерференцию от N одинаковых
синфазных источников, расположенных на одной
прямой на расстоянии d друг от друга. На боль-
большом расстоянии от источников (г ^> Nd) в на-
направлении 9 происходит сложение N колебаний
одинаковой амплитуды А0) причем разность фаз
Рис. 65. между соседними колебаниями равна ф = dsin0.
Результирующую амплитуду А найдем из уравнений (см. векторную
диаграмму на рис. 65): Ао = #sin(<?/2), A = Rsin(N<j)/2). Исключая
радиус описанной окружности R, получим:
= А0
_
" °
8т2{ф/2)
(9)
5.2. Интерференция света 273
р> Интерференция от естественных источников света. Из-
Излучение естественный (тепловых) источников света состоит из мно-
множества цугов волн, спонтанно испущенных возбужденными атомами
при их высвечивании, т.е. при возвращении в нормальное состояние.
Длительность цуга ~10"0Ч-10"8 с, он содержит 106-r 108 колебаний.
Значит, два разных естественных источника некогерентны даже при
выделении в их излучении узкой спектральной полосы, поскольку раз-
разность фаз колебаний очень быстро и хаотически меняется в каждой
точке наблюдения. Для наблюдения интерференции надо излучение
от одного источника расщепить на два или несколько пучков и заста-
заставить их попадать в точку наблюдения различными путями. При этом
будет происходить интерференция каждого из цугов с самим собой,
и условие максимума или минимума будет одновременно выполняться
для всех цугов одной частоты, испущенных из одной и той же точки
источника. Удобно ввести оптическую разность хода пучков
Д= /n2dl-'jr^
где интегрирование ведется вдоль линии, которую данный пучок
проходит от точки излучения до точки интерференции. Условие
максимума: Д = тЛ; условие минимума: Д = (т + у)А? где т
называется порядком интерференции.
Приведем классические примеры получения двух когерентных
источников.
1. Опыт Юнга (упоминался выше). Солнечный свет падает на
очень узкую щель в первом экране, вследствие дифракции расходится
и падает на две узкие щели во втором экране. Опять же из-за дифрак-
дифракции после этих щелей свет расходится и образует перекрывающиеся
когерентные пучки.
2. Зеркала Френеля. Свет от ярко светящейся щели падает на два
зеркала, скрещенных под углом почти 180°. Близко расположенные
мнимые изображения щели образуют два когерентных источника.
3. Бипризма Френеля. Свет от ярко освещенной щели преломля-
преломляется в двух стеклянных призмах с малыми преломляющими углами,
сложенных своими основаниями. В результате преломления образу-
образуются два близко расположенных мнимых изображения щели.
4. Билинза Бийе. Собирающая линза разрезается пополам и по-
половинки слегка раздвигаются. Билинза освещается узкой щелью, па-
параллельной линии разреза. Каждая половинка линзы формирует свое
Действительное изображение щели.
5. Зеркало Ллойда. Свет от узкой щели отражается от зеркальной
плоскости, образуя мнимое изображение щели. Интерферируют свет
от самой щели и от ее изображения.
274 Оптика
> Влияние размеров источника. Пространственная коге-
когерентность. Разность хода лучей в данной точке экрана имеет опре-
определенное значение только в случае точечного источника. При перехо-
переходе от одной точки протяженного источника к другой разность хода
меняется. Если разность хода изменится на А/2, то условие максиму-
максимума превратится в условие минимума, т.е. наложение интерференцион-
интерференционных картин от разных участков протяженного источника приводит
к смазыванию общей интерференционной картины.
Рассмотрим, например, плоский источник. Предположим, что пер-
первый из интерферирующих лучей исходит от источника под углом аг
к его нормали, а второй — под углом а2. Пусть
эти лучи лежат в одной плоскости с нормалью,
а углы излучения почти одинаковы для всех то-
точек источника (рис. 66). При переходе от одного
конца источника к другому длина пути первого
луча изменится на /sina^, второго — на /sina2
Рис 66 (/ — размеры источника в плоскости лучей), а
разность хода изменится на /(sina2 ~ sinaj.
Условие сохранения интерференционной картины (условие простран-
пространственной когерентности) принимает вид
/| sin а2 — sinаг | < А/2.
«¦Пример 1. В опыте Юнга / — ширина щели в первом экране,
с*! = —а2 = 6/BL), где 6 — расстояние между щелями во втором экране, L^> b —
расстояние между экранами; получим: 2l(b/2L) < Л/2, т.е. / < AL/B6). Перепишем
эту формулу в виде: 6 < A/Bt/>), где ф = 1/L — угловые размеры источника, или
угол расхождения падающих на две щели лучей. Например, при прямом освещении
щелей Солнцем ф & 0,009 рад, Л « 500 нм, т.е. расстояние между щелями должно
быть меньше 0,06 мм. Именно поэтому надо сначала солнечный свет пропускать
через узкую щель. .-
> Влияние немонохроматичности света. Временная коге-
когерентность. Нарушение монохроматичности складывающихся волн
может привести к смазыванию картины интерференции. Предполо-
Предположим, что частоты излучаемых волн лежат в узком спектральном ин-
интервале Аи). Сильное искажение картины интерференции происходит
в том случае, если разность хода Д превышает некоторое критиче-
критическое значение LK) которое называют длиной когерентности] LK име-
имеет смысл длины цуга волн, испускаемого атомом в одном акте из-
излучения (напомним, что устойчивая интерференция происходит при
сложении цугов в одном из разделенных пучков с соответствующими
им цугами в другом пучке). Время rK'= LK/c, которое называют вре-
временем когерентности, имеет смысл длительности цуга волн. В со-
соответствии с общими свойствами преобразования Фурье, спектраль-
спектральная ширина волнового пакета связана с его длительностью соотноше-
соотношением Аи) At ~ 2тг. (Пример: «оборванная» синусоида 4(*)sincJotf, где
5.2. Интерференция света
275
А = const в интервале —т/2 < t < т/2 иА = 0 вне этого интервала, име-
имеет разложение Фурье а(и)) ~ ~ г-^ , ширина которого равна
Аи) ~ .) Максимальный порядок спектра, в котором можно наблю-
наблюдать интерференцию, можно оценить как N ~ LK/X = тк/Т = и)/Аи).
> Интерференция в тонких пленках. Рассмотрим интерферен-
интерференцию лучей, отраженных от передней и задней поверхностей тон-
тонкой пленки (рис. 67). Будем считать фронт
волны плоским, т.е. источник достаточно
удаленными. Так как фронт преломленной
волны перпендикулярен лучу, то луч 1 в
точке D и луч 2 в точке D1 имеют одина-
одинаковые фазы. Значит, оптическая разность
хода лучей в точке D равна n(D'C + CD).
Кроме того, к разности хода надо до-
добавить А/2, что позволит учесть измене-
изменение фазы на тг при отражении от среды
с большим показателем преломления (на
границе воздух — пленка в точке D). После преобразований получим:
Д = 2dncosxl) + —,
где d — толщина пленки, п — ее показатель преломления. Условие
максимума для наблюдения в отраженном свете Д = гпХ выполняется
для определенных длин волн. Для очень тонких пленок условию
максимума удовлетворяют одна или две длины волны из видимого
диапазона, и пленка оказывается окрашенной. Условию максимума
для наблюдения в отраженном свете соответствует для той же
длины волны условие минимума для наблюдения в проходящем свете
(отражений на границе воздух — пленка не происходит). Как всегда
при интерференции, энергия не увеличивается, а перераспределяется.
Рассмотрим теперь два важных случая.
1) Полосы равной толщины. Если лучи падают под почти посто-
постоянным углом, например нормально, а толщина пленки меняется, то
линии постоянной толщины есть линии постоянной разности хода.
При освещении монохроматическим светом эти линии будут видны в
виде темных или светлых полос. При наблюдении в белом свете (при
условии малой толщины пленки) линии будут цветными. Интерфе-
Интерференция происходит вблизи поверхности пленки (интерференционная
картина локализована на поверхности).
2) Полосы равного наклона. Толщина пленки постоянна, освеще-
освещение ведется рассеянным светом от удаленного источника. Меняя угол
наблюдения, мы будем получать то условие максимума, то минимума.
R
У
\
276 Оптика
Интерференционная картина локализована на бесконечности (или в
фокальной плоскости линзы). Для очень тонких пленок свет может
быть не монохроматичным, наблюдение под данным углом выделяет
ту длину волны, для которой выполнено условие максимума.
Пример 2. Кольца Ньютона. Бели плосковыпуклую линзу положить
на поверхность стеклянной пластинки и освещать монохроматическим светом,
падающим нормально, то на воздушном промежутке будут наблюдаться полосы
равной толщины, имеющие форму окружностей. Толщина промежутка равна
d « VR2 + г2 - R « г2/BЯ), где г — радиус окружности (рис. 68). Условие
минимума имеет вид 2d-f (Л/2) = (га + у)А, или rm = \/mXR. В центре картины
будет темное пятно.
> Принципы голографии. Голография используется для записи
объемного изображения предмета. Предмет освещается светом лазе-
лазера, обладающим очень высокой степенью ко-
когерентности, и попадает на фотопластинку.
Информацию о форме предмета несет зави-
зависимость фазы предметной волны от положе-
положения на пластинке. Если на пластинку одно-
одновременно со светом, отраженным от предме-
предмета, послать отраженный от зеркала опорный
лазерный луч, которым освещается предмет,
то в результате интерференции образуется
Риг* 68 и
волна, амплитуда и интенсивность которой
будут зависеть от фазы предметной волны. Так как почернение фо-
фотопластинки пропорционально интенсивности, то на ней сохранится
информация о фазе волны. Освещая проявленную пластинку светом
того же лазера, можно восстановить исходный сигнал.
При записи интерференционного сигнала в объеме толстой про-
прозрачной фотопластинки возникает объемная голограмма, которая не-
несет информацию как о форме предмета, так и о длине волны лазерно-
лазерного сигнала. При освещении голограммы белым светом волны других
частот гасят друг друга за счет интерференции, и возникает изобра-
изображение предмета, освещенного монохроматическим лазерным светом.
Если в одной пластинке записать три голограммы от лазеров с раз-
различными длинами волн, то при освещении белым светом возникает
объемное цветное изображение.
> Излучение Вавилова — Черенкова. При движении частицы
в среде со скоростью V, превышающей фазовую скорость v = с/п
света в этой среде, возникает излучение электромагнитных волн под
определенным углом к направлению движения частицы. Элементар-
Элементарное объяснение этого явления совершенно аналогично объяснению
возникновения ударной волны при движении со сверхзвуковой скоро-
скоростью. При прохождении частицы возникает излучение возбужденных
ею атомов среды. Разность хода волн, излученных возбужденными
5.3. Дифракция
277
атомами в направлении в из положений А V
и В (рис. 69), равна В "*
Д = v— — Lcos0 = b( — — COS0J.
Если V < i>, то для любого угла в можно
подобрать такое L, что излучение точек А
и В гасит друг друга (Д = А/2). При V > v
то же самое относится к любому углу, не
равному 0О = arccos(t;/Vr) (можно добиться
Д = ±А/2). Однако в направлении 90 все точки излучают волны с
одной и той же фазой, т.е. происходит взаимное усиление излучения.
Рис. 69.
5.3. Дифракция
> Принцип Гюйгенса — Френеля. Дифракцией называются от-
отклонения от закона прямолинейного распространения света. Прибли-
Приближенный расчет интенсивности света после препятствий или отвер-
отверстий в экране опирается на принцип Гюйгенса — Френеля, который
дополняет геометрическое построение Гюйгенса (см. разд. 5.1) усло-
условием интерференции вторичных лучей. Согласно этому принципу, все
точки произвольной поверхности, окружающей источники волн, явля-
являются источниками когерентных вторичных волн, а амплитуда коле-
колебаний волны в произвольной точке вне этой поверхности может быть
получена как результат интерференции вторичных волн. Обычно в
качестве такой поверхности выбирают фронт волны, тогда источни-
источники вторичных волн синфазны. Амплитуда вторичной волны пропор-
пропорциональна амплитуде первичной волны и площади участка поверх-
поверхности:
dE =
- kr)]ds,
A0)
где Ео — (комплексная) амплитуда первичной волны в точках фронта,
о. — угол между направлением излучения и нормалью к поверхности,
г — расстояние от фронта вторичных источников до точки наблюде-
наблюдения, К(а) —медленно убывающая функция (/?(тг) = 0).
> Зоны Френеля. Рассмотрим из-
излучение точечного источника света.
В качестве поверхности вторичных
волн выберем сферу радиусом а и
изучим вклад различных участков
сферы в колебания волны в точке В,
находящейся на расстоянии а + Ъ от
источника (рис. 70). Из точки В ра-
Рис. 70.
278
Оптика
диусами г и г -f dr засечем на сфере две окружности. Из теоремы ко-
косинусов г2 = а2 + (а + 6J -2a(a + b)cos9 получим rdr = a(a + 6) sin 9d9,
Значит, величина (ds/r) = 2тга2 sin в d6/r = 2iradr/{a-\- b) не зависит
от г, т.е. вклады от участков, соответствующих одинаковым измене-
изменениям длины пути dr (т.е. одинаковым приращениям фазы d^), име-
имеют одинаковые амплитуды dE. Следовательно, векторная диаграмма
складывающихся колебаний (рис. 71) имеет вид медленно закручи-
закручивающейся спирали (с учетом медленного уменьшения К (а)). Из со-
соображений симметрии можно сделать вывод, что спираль сходится к
центру окружности. Сумма всей спирали соответствует свободному
распространению света в отсутствие экранов.
Часть поверхности от центра до точек, где гг = b + А/2, назы-
называется первой зоной Френеля, от края первой зоны до г2 = 6 + А —
2-я зона
центр
3-я зона
второй зоной Френеля, и т.д. Видно,
что если открыть только первую зо-
зону Френеля, а все остальное закрыть
экраном, то амплитуда колебаний бу-
будет в 2 раза больше, чем в отсутствие
экрана, а интенсивность — в 4 раза
больше. Если открыть две первые зо-
зоны, то амплитуда и интенсивность в
точке В будут близки к нулю, и т.д.
Наоборот, если закрыть экраном не-
небольшое число центральных зон Фре-
Френеля, то это почти не скажется на ин-
интенсивности колебаний в точке В —
она будет почти такой же, как и в от-
1-я зона
Рис. 71.
сутствие экрана (этот парадоксальный факт известен под названием
«пятно Пуассона»). Чтобы понять, какие зоны будут закрыты или от-
открыты в каждом конкретном случае, полезно знать радиус окружно-
окружности Л, засекаемой из точки В радиусом-вектором 6+Д, При малых Д
он имеет вид
/2а6Д
Чтобы найти радиус т-й зоны Френеля, надо подставить Д = тА.
Для шгоскрго фронта волны, что соответствует предр 1ьному случаю
а —> сю, получим Д(Д) = \/26Д.
Метод зон Френеля хорошо работает только при не очень боль-
большом числе зон Френеля. Этот метод сложно применить к точкам,
лежащим в стороне от центра экрана. Дифракционные эффекты про
надают при Д ^> А, т.е. при b <^C Н2/Х.
> Дифракция Фраунгофера от щели. Дифракцией Фраунгофе-
ра называют дифракцию в параллельных лучах, тс*, когда разность
5.3. Дифракция 279
фаз вторичных волн, исходящих от различных точек рассматривае-
рассматриваемого участка волнового фронта, можно найти в предположении их
параллельности. В этом приближении дифракционная картина упро-
упрощается, и можно рассчитывать интенсивность света в разных точ-
точках экрана. Приближение Фраунгофера действует в двух случаях:
во-первых, если лучи света после дифракции собираются линзой в ее
фокальной плоскости, и во-вторых, если экран удален от дифракци-
дифракционного отверстия на достаточно большое расстояние (г >> Л2/А).
Рассчитаем в приближении Фраунгофера дифракцию плоской мо-
монохроматической волны на щели шириной Ь. Ограничимся изучени-
изучением нормального падения волны на экран с
щелью; в этом случае все точки щели явля-
являются источниками вторичных синфазных
волн. Разобьем плоскость щели на боль-
большое число N одинаковых узких полосок
(рис. 72). Амплитуда света от каждой по-
полоски равна EQ/N, где Ео — амплитуда
света, посылаемого щелью в направлении
в = 0 (в этом случае все полоски излучают Рис. 72.
свет синфазно). При излучении в направлении, составляющем угол в
с нормалью, разность фаз между излучением соседних полосок рав-
равна Sip = B7r/X)(b/N) sin0, разность фаз между крайними полосками
равна <р = Bтг/АN sin в = NS<p. Используя выражение (9) для интерфе-
интерференции N источников, получим амплитуду излучения щели в напра-
направлении в (sin8<p надо заменить на 8ф):
где f = ^Js^e- (И)
Интенсивность излучения, равная Ix = /0 sin2((p/2)/(<p/2J, а также
характерные векторные диаграммы изображены на рис. 73. Условие
минимумов излучения имеет вид:
6sin0 = mA (m = 1, 2,...). A2)
Условие максимумов: 6 sin б « (т + у)А (т = 1, 2, ...). Максимумы
интенсивности относятся как /0 : 1Х : 12 ... « 1 : A,5тгJ : B,5л-J...
Максимальный порядок спектра определяется условием т ^ 6/BА).
> Дифракция Фраунгофера на круглом отверстии. Разре-
Разрешающая способность оптических приборов. В случае дифрак-
дифракции на круглом отверстии распределение интенсивности имеет вид
концентрических темных и светлых кругов вокруг центрального
светлого пятна. Распределение интенсивности при малых углах в с
осью отверстия выражается через функцию Бесселя первого поряд-
порядка: / = /0Jy[^D0/\)) где D—-диаметр отверстия. Внешне угловое
280
Оптика
А
Рис. 73.
2Л
b sin0
распределение интенсивности мало отличается от случая дифракции
на щели; первый минимум соответствует углу 91 = 1,22 X/D.
Угол вг можно считать углом дифракционного расширения пучка
света. Расплывание пучка будет слабым на расстояниях /, удовлетво-
удовлетворяющих условию: 1вх ^С Д или / <gC D2/X. Это неравенство является
условием применимости геометрической оптики (см. разд. 5.1).
При наблюдении в оптический прибор (линза, телескоп) двух близ-
близких точек они будут изображаться на экране в виде маленьких ди-
дифракционных кружков. Условно считается, что изображения точек
неразличимы, если они сблизились настолько, что центральный мак-
максимум одного кружка совпал с первым минимумом другого (крите-
(критерий Рэлея). Значит, угловое разрешение таких приборов выражается
формулой
Этот предел возможного разрешения прибора накладывается волно-
волновой природой света и не может быть превзойден никакими техниче-
техническими усовершенствованиями.
> Дифракционная решетка. Дифракционной решеткой называ-
называется последовательность из большого числа N одинаковых парал-
параллельных щелей. Ширина каждой щели рав-
равна Ь) расстояние между соседними щелями, ко-
которое называют периодом решетки, равно d
(рис. 74). Каждая щель излучает в направле-
направлении в свет, амплитуда которого Ех определя-
определяется выражением A1). Разность фаз между со-
соседними щелями равна 6 = B7r/A)dsin0, и для
вычисления итоговой амплитуды можно опять
Рис. 74. воспользоваться формулой (9) для суммы ко-
колебаний N независимых источников:
„_„ sin(NS/2) -^
sin'(N6/2)
71 i2(rf/2)
5.3. Дифракция 281
Главные максимумы дифракционной решетки определяются условием
dsin0 = mA. A3)
В направлении главных максимумов интенсивность излученной вол-
волны /= N2IX полностью определяется интенсивностью излучения от-
отдельной щели в этом направлении. Если главный максимум окажется
вблизи минимума I^O), определяемого условием 6sin0 = kX, то этот
максимум окажется подавленным. Максимальный порядок спектра
определяется условием m ^ d/X.
Между каждыми двумя главными максимумами дифракцион-
дифракционная картина содержит N — 1 минимум и N — 2 добавочных мак-
максимума. Минимумы определяются условиями dsin9 = (га 4- n/N)\
(п = 1, 2, ..., N — 1). Интенсивность добавочных максимумов гораз-
гораздо меньше, чем главных, и при большом числе штрихов их можно не
учитывать.
При падении света на решетку под углом 0О ф О условие главных
максимумов приобретает вид:
d(sin0-sin0o) = тЛ. A4)
Для грубых решеток (d ^> Л) эффективным оказывается использова-
использование скользящих лучей @О » тг/2), для которых условие главных мак-
максимумов приобретает вид: dcos0o@ — 0о) = тпХ. Видно, что роль эф-
эффективного периода в этом случае играет малая величина dcos0o.
> Дифракционная решетка как спектральный прибор. Свой-
Свойства любого спектрального прибора определяются его угловой дис-
персией, дисперсионной областью и разрешающей способностью.
Угловой дисперсией называется производная Dm = йвт/йХ) где,
9т — положение главного максимума m-го порядка. Из условия
главного максимума получим
п — т
т ~ dcos0*'
Дисперсионной областью называется максимальная ширина ДЛ
спектрального интервала, при которой еще нет перекрытия спектров
соседних порядков. Из уравнений dsin0 = m(A+AA) и dsin0==(m-f-l)A
имеем ДА = А/т. Видно, что для исследования широких участков
спектра надо применять низкие порядки.
Разрешающей, способностью называется отношение R = Х/5Х, где
?А — наименьшая разность длин волн, которые может разрешить
спектральный прибор. Две линии считаются разрешенными, если
максимум одной линии попал на минимум другой (критерий Рэлея).
Из уравнений dsin0 = (m + 1/N)X и dsin0 = m(X 4- SX) получим
<U = A/(miV),T.e.
R = — = mN.
дл
282 Оптика
> Дифракция рентгеновских лучей на кристалле. Длина вол-
волны рентгеновских лучей сравнима с расстоянием между атомами
кристаллической решетки, которая для падающих лучей представля-
представляет собой пространственную дифракционную решетку. Условие ди-
дифракционных максимумов состоит в одновременном выполнении трех
уравнений A4) для трех взаимно перпендикулярных кристаллических
осей (условия Лауэ):
dx(cosa-cosa0) = nx\, d2{cosC—cos/30) = n2A, c!3(cos7—cos70) = n3A,
где a, /?, 7 — углыс осями, связанные условием cos2a+cos2/?+cos27=L
Эти три уравнения нельзя одновременно удовлетворить при про-
произвольно выбранном направлении падающего луча и заданной дли-
длине волны. Это значит, что при облучении кристалла монохромати-
монохроматическими, но рассеянными рентгеновскими лучами (т.е. имеющими
всевозможные направления) возникают дифракционные максимумы
во вполне определенных направлениях. Анализ получающихся лауэо-
грамм позволяет получать информацию о строении кристалла. Ди-
Дифракционные максимумы отсутствуют, если А/2 превышает^все пе-
периоды решетки; для видимого света кристалл можно считать одно-
однородной средой.
Отражение рентгеновских лучей от поверхности кристалла можно
также рассматривать как интерференцию лучей, отраженных от си-
системы последовательных атомных плоскостей в кристалле. По анало-
аналогии с интерференцией в тонких пленках (см. раЭд. 5.2), разность хода
между лучами, отраженными от соседних плоскостей, равна dsin#,
где в — угол между падающим лучом и атомной плоскостью (не с
нормалью!), а d — межплоскостное расстояние. (Отметим, что по-
показатель преломления рентгеновских лучей мало отличается от еди-
единицы, см. разд. 5.5.) Отражение наблюдается только в направлени-
направлениях дифракционных максимумов, удовлетворяющих условию Вульфа ¦—
Брегга:
2dsm6 = mA,
где т = 1, 2, ... — порядок дифракционного максимума.
5.4. Поляризация света. Формулы Френеля
> Поляризованный и естественный свет. Плоская волна назы-
называется линейнополяризованной или плоскополяризованной) если коле-
колебания вектора Е происходят в одной плоскости, перпендикулярной
фронту волны (ее называют плоскостью поляризации волны). Моно-
Монохроматическая плоская волна либо линейно поляризована, либо по-
поляризована по эллипсу или по кругу (см. разд. 4.5). Эллиптически
поляризованная волна представляет собой сумму двух взаимно пер-,
пендикулярных плоских волн, между колебаниями которых имеется
5.4. Поляризация света. Формулы Френеля
283
разность фаз. Естественный свет, испущенный нагретыми телами,
является неполяризованным, поскольку направление колебаний век-
вектора Е в каждой точке быстро и хаотически хменяется. Смесь есте-
естественного и поляризованного света называется частично поляризо-
поляризованным светом.
Поляризатором называется устройство, поглощающее свет, поля-
поляризованный в одной плоскости, но пропускающее свет, поляризован-
поляризованный в перпендикулярной плоскости. Плоскость поляризации прошед-
прошедшего света называют плоскостью пропускания поляризатора. Если
естественный свет пропустить через поляризатор, то он станет ли-
линейно поляризованным, а его интенсивность уменьшится в два раза
(если нет поглощения в плоскости пропускания поляризатора). Если
линейно поляризованный свет интенсивностью /0 пропустить через
поляризатор, плоскость пропускания которого составляет угол а с
плоскостью колебаний световой волны, то интенсивность прошедшей
волны будет составлять
I =
cos2 a
(закон Малюса). Объясняется это тем, что линейно поляризованный
свет с амплитудой Ео представляет собой сумму двух линейно по-
поляризованных волн: волна, поляризованная в плоскости пропускания
(ее амплитуда равна i50cosa), пройдет через поляризатор без изме-
изменений, а вторая волна будет поглощена.
> Отражение и преломление волн. Формулы Френеля.
Интенсивность и поляризация отра-
отраженной и преломленной волн зависят от "^
того, как поляризована падающая вол-
волна. Запишем граничные условия на по-
поверхности раздела двух сред:
Здесь нижние индексы г, п обозна-
обозначают тангенциальную и нормальную
компоненты, а верхние индексы г, г,
d соответствуют падающей, отражен-
отраженной и преломленной волнам. Для плоской монохроматической волны
Рис. 75.
{ut-&?)], ^о =exp[i(ut-kd-r)]
соотношения для волновых векторов (рис. 75) имеют вид:.
Щ = k$ = кг sin а, кг = к1у к6 = к2,
284 Оптика
где Arx = um1/ci к2 = ип2/с. Из этих соотношений получим закон от-
отражения. В случае, когда к2 > кх sin a (sin а < п2/п1)) приходим к за-
закону Снеллиуса: nl sin а = п2 втф. Если sin а > п2/п1) то происходит
полное отражение: kj_ = —i\/k\ sin2 a — k\ = —i(u)/c)\/n\ sin2 a — n\
оказывается мнимым, т.е. амплитуда прошедшей волны экспоненци-
экспоненциально затухает с характерной глубиной проникновения S ~ l/l^ll-
Амплитуды прошедшей и отраженной волн зависят от поляриза-
поляризации падающей волны. Приведем результат для отраженных волн:
at _ а\ Ч{<* - Ф) Ad _ Ai sin(a-^)
11 И tg(a + ф) L L sin(a + ^)
(формулы Френеля). Здесь первая формула относится к волне, поля-
поляризованной в плоскости падения, а вторая — к волне, поляризованной
в перпендикулярной плоскости. Видно, что при угле падения, удовле-
удовлетворяющем условию а + ф = тг/2, волна, поляризованная в плоскости
падения, отражаться не будет. Так как в этом случае sin^> = cos a,
то угол падения, при котором отраженная волна будет линейно по-
поляризованной перпендикулярно плоскости падения (угол Брюстера))
удовлетворяет соотношению:
tga = п.
Качественное объяснение состоит в том, что в этом случае напра-
направление колебаний диполей (указаны на рисунке), возбужденных во
второй среде волной, поляризованной в плоскости падения, оказы-
оказывается параллельным направлению отраженной волны (отраженный
и преломленный лучи взаимно перпендикулярны"). Но осциллятор не
излучает волну в направлении своих колебаний (см. разд. 4.5).
В случае нормального падения различие между поляризациями
пропадает:
п1 + п2
Видно, что при отражении от оптически более плотной среды
(n2 > nx) фаза колебаний сменяется на противоположную (точнее,
к фазе добавляется тг).
Отношение отраженной энергии к энергии падающей называется
коэффициентом отражения. При нормальном падении он равен
R=^%. A5)
Коэффициент пропускания равен D = 1 — R. Коэффициенты R и D
зависят только от относительного показателя преломления двух сред.
Пример. Просветление оптики. Коэффициент отражения стекол в опти-
оптических приборах невелик (несколько процентов). Тем не менее важной задачей
5.4. Поляризация света. Формулы Френеля 285
является уменьшение отражения для определенных длин волн. Для этого на по-
поверхность наносят прозрачную пленку с показателем преломления п1 = у/п (п —
показатель преломления стекла) и толщиной A/Dn'). Оптическая разность хо-
хода между лучами, отраженными от поверхностей пленки, равна А/2 (изменение
фазы при отражении учитывать не надо, так как оно происходит у каждого из
лучей), а коэффициенты отражения на этих поверхностях будут близки друг к
другу (см. формулу A5)). В результате произбйдет почти полное гашение отра-
отраженного света.
*> Оптически анизотропные среды. В случае сред, обладающих
анизотропией, векторы Е и D в общем случае уже не параллельны
друг другу. Линейная связь между ними носит тензорный характер,
т.е. каждая из компонент вектора D выражается в виде линейной
комбинации всех трех компонент вектора Е. Существуют три вза-
взаимно перпендикулярные оси, называемые диэлектрическими осями
кристалла, для которых Di = e^Ei (i = 1,2,3). Значения г{ называ-
называются главными диэлектрическими проницаемостями кристалла. Мы
рассмотрим только случай одноосных кристаллов, у которых две из
трех ?,- равны друг другу (в = е^). Выделенная ось (? = ?.,) называется
оптической осью кристалла.
При распространении в одноосном кристалле плоской волны вво-
вводят главное сечение кристалла — плоскость, проходящую через
оптическую ось и вектор нормали п к фронту волны. Оказывается,
что распространение линейно поляризованной световой волны зави-
зависит от направления ее поляризации. Волна, поляризованная перпенди-
перпендикулярно главному сечению, называется обыкновенной. Скорость рас-
распространения такой волны f j_ = с/\/^Т не зависит от направления;
колебания векторов Е и и направлены одинаково; направление рас-
распространения энергии (т.е. вектора Пойнтинга S — Е хп) перпенди-
перпендикулярно фронту волны. Волна, поляризованная параллельно главному
сечению, называется необыкновенной. Скорость ее распространения
зависит от угла между п и оптической осью (при угле тг/2 между ни-
ними она равна th. = с/^/ц). Колебания векторов Е и 3 происходят в
разных направлениях, вектор Пойнтинга ?=ВхЯне перпендику-
перпендикулярен к фронту волны (нормаль к фронту волны параллельна D х л).
Разница между обыкновенным и необыкновенным лучами исчезает
только при распространении света параллельно оптической оси.
При падении света на поверхность кристалла он разделяется на
обыкновенный и необыкновенный лучи, линейно поляризованные пер-
перпендикулярно друг другу и имеющие разные показатели преломле-
преломления. Закону преломления (см. разд. 5.1) подчиняется направление
распространения фронта необыкновенной волны, сам же луч мо-
может выйти из плоскости падения. Даже'при нормальном падении
луча на кристалл, вырезанный под углом к оптической оси, про-
происходит пространственное разделение лучей (рис. 76). Положения
286 Оптика
фронтов указаны черточками, положение оптической оси — стрел-
I | | | | кой. Необыкновенный луч поляризован
Ў Ў ' " Ў в плоскости чертежа, обыкновенный -—
перпендикулярно ей.
Для получения и анализа поляризован-
поляризованного света используют поляризационные
призмы (николи), разрезанные под углом
к распространению лучей таким обра-
_, . , , зом, что обыкновенный луч испытывает
необЯ—Ч F——I об.
на плоскости разреза полное отражение и
Рис 76 г «
уходит в сторону, а необыкновенный луч
проходит прямо. Другой способ получения поляризованного света
основан на различии в поглощении обыкновенного и необыкновен-
необыкновенного лучей в некоторых веществах. При пропускании света через
дихроичную пластину (пластинку турмалина, поляроид) обыкновен-
обыкновенный луч поглощается, и наружу выходит линейно поляризованный
необыкновенный луч.
Для анализа характера поляризации света изучают зависимость
интенсивности от ориентации николя. Если интенсивность не меня-
меняется, то свет либо естественный, либо поляризован по кругу. Что-
Чтобы различить эти случаи, используют пластинку в четверть волны)
или компенсатор. Толщина пластинки d подобрана так, чтобы раз-
разность хода между обыкновенным и необыкновенным лучами Д = An d
равнялась А/4. Сдвиг фаз между взаимно перпендикулярными коле-
колебаниями станет равным либо нулю, либо 7Г, и круговая поляризация
превратится в линейную.
> Вращение плоскости поляризации. При распространении в
некоторых веществах (их называют оптически активными) линей-
линейно поляризованного света происходит вращение плоскости поляри-
поляризации. Угол поворота пропорционален толщине пластины: х = а/, где
а — вращение на единицу длины. В зависимости от направления по-
поворота различают право- и левовращающие вещества. Пример — пла-
пластинка кварца, вырезанная перпендикулярно оптической оси (кварц
бывает как лево-, так и правовращающим). В растворах оптически
активного вещества в неактивном растворителе а пропорционально
концентрации. Молекулы активных веществ обладают асимметрией
по отношению к правому и левому вращению по типу спирали. Явле-
Явление вращения плоскости поляризации можно охарактеризовать как
круговое двойное лучепреломление. Волны, поляризованные по кру-
кругу в разные стороны, распространяются''с разными скоростями, т.е.
разность фаз между ними меняется. Сумма двух таких колебаний
представляет собой линейное колебание, направление которого зави-
зависит от разности фаз.
5.5. Дисперсия и поглощение света 287
^ Искусственная анизотропия. При помещении многих изотроп-
изотропных тел в однородное электрическое поле у них возникает одноос-
одноосная анизотропия с оптической осью, ориентированной параллельно
напряженности поля (электр о оптический эффект Керра). Разность
хода между обыкновенным и необыкновенным лучами при распро-
распространении света перпендикулярно Е пропорциональна квадрату на-
напряженности:
2
где / — толщина слоя вещества, а В называется постоянной Керра.
Искусственная анизотропия возникает в тех случаях, когда поляри-
поляризуемость молекул вещества зависит от их ориентации по отношению
к полю. Аналогичный эффект возникает при помещении некоторых
веществ в магнитное поле (эффект Коттона —Мутона). Он опи-
описывается соотношением Д<?> = 2пС1В2.
При помещении неактивных веществ в сильное магнитное поле
может возникнуть оптическая активность для света, распространя-
распространяющегося параллельно вектору В (магнитное вращение плоскости
поляризации). Вращение на единицу длины в этом случае (для диа-
и парамагнетиков) пропорционально величине магнитной индукции:
а — RB) где R называется постоянной Верде.
5.5. Дисперсия и поглощение света
> Классическая модель диспергирующей среды. При распро-
распространении в веществе электромагнитной волны заряженные частицы
среды приходят в вынужденное колебательное движение. Амплитуда
этих колебаний и их сдвиг по фазе по отношению к колебаниям на-
напряженности зависят от соотношения частоты волны и и частоты
собственных колебаний частиц ш0 (см. разд. 4.3). Результирующее
волновое возмущение можно рассматривать как результат интерфе-
интерференции исходной волны и волн, излученных частицами среды (такой
подход называют молекулярной оптикой). Однако в случае однород-
однородной среды можно получить частотные характеристики волны полуфе-
полуфеноменологически, учитывая возникающую при смещении частиц по-
ляризованность, вводя зависящие от частоты диэлектрическую вос-
восприимчивость и проницаемость и вычисляя показатель преломления.
Затухание волны, т.е. преобразование энергии колебаний в тепловую
энергию, учитывается введением полуэмпирических коэффициентов
затухания осцилляторов; диэлектрическая проницаемость и показа-
показатель преломления становятся при этом комплексными числами.
Рассмотрим сначала среду из одинаковых осцилляторов. Уравне-
Уравнение движения заряженной частицы имеет вид
288
Оптика
(О
'02
О)
Рис. 77.
где Е — поле, действующее на частицу (в оптическом диапазоне
играют роль только электроны). В неплотных газах можно не учиты-
учитывать отличие локального поля от среднего, т.е. считать, что на элек-
электроны действует непосредственно поле волны Е = Е0 exp[i(ujt—k-x)].
Решение уравнения движения ищем в виде ? = ?0 ехр(го>?), и после под-
подстановки получим
* m(a;g - а;2 + 2i/?w)
(в комплексной записи автоматически учитывается сдвиг фаз). Сме-
щение^ частиц приводит к появлению у молекул дипольных моментов
р = е?, т.е. к появлению поляризованности Р = Np (N — концентра-
концентрация). Из соотношения Р = ео(е - 1)Е находим комплексную диэлек-
диэлектрическую проницаемость
ДГе2
6=1+ (l*
Показатель преломления тоже будет мнимый: у/е = п — гх) причем
через действительную часть выражается фазовая скорость волны, а
через я — коэффициент затухания:
Е = ?оехр(-—я) ехр[г(сЛ - кх)}. A7)
Чтобы найти п(и) и х(и), надо в равенстве е = (п - ЫJ приравнять
действительные и мнимые части. Вдали от собственной частоты (при
\и — ио\*3> C) получим
€ - п2 - 1 We2
~ " eom((jjl -о;2) '
Графики зависимостей n(w) и х(и) представлены на рис. 77. Там, где
поглощение невелико, показатель преломления возрастает с частотой
(нормальная дисперсия). В узкой области сильного поглощения на-
наблюдается аномальная дисперсия.
5.5. Дисперсия и поглощение света 289
Аналогичная ситуация возникает возле каждой собственной ча-
частоты. Например, в инфракрасной области спектра наблюдаются по-
полосы поглощения и аномальной дисперсии, связанные с колебаниями
ионов. Полосы поглощения в ультрафиолетовой (иногда — в видимой)
областях спектра объясняются колебаниями электронов на внешних
оболочках атомов (оптических электронов). В рентгеновской области
спектра частота волны lj велика по сравнению со всеми собственны-
собственными частотами и зависимость n(uj) определяется колебаниями электро-
электронов, которые можно считать свободными:
Ne2
Коэффициент преломления рентгеновских лучей мало отличается от
единицы. Такая же формула верна для волны, распространяющейся в
разреженной плазме, содержащей свободные электроны.
Фазовая скорость волны в плазме (а также справа от полосы поглощения
в диэлектрике) оказывается больше скорости света в вакууме (п < 1). Однако
здесь не содержится противоречия с теорией относительности, так как групповая
скорость волны и = duj/dk (см. разд. 4.4) будет при этом меньше с. Убедимся в этом
для волны в плазме. Используя соотношение к2 = а/2п2(аг)/с* и уравнение A8),
получим:
9 , ,, , ш diJ о
сГ к dk = iaj diAj =» = сг.
к dk
Значит, в этом случае и = пс < с.
У полярных молекул (например, воды) широкая полоса аномаль-
аномальной дисперсии находится в области сантиметровых радиоволн, где
амплитуда вращательных колебаний диполей, стремящихся повер-
повернуться вслед за напряженностью поля, сильно зависит от частоты.
Именно в этой области происходит уменьшение п = у/ё от большого
статического значения (для воды п0 « 9) к высокочастотному значе-
значению (для воды п « 1,3).
Формула A6) верна только при п, близких к единице, когда можно
пренебречь отличием поля, действующего на молекулу, от среднего
поля в веществе. Обобщением на случай плотных газов и жидкостей
является формула Лорентц —Лоренца:
п2-\ Ne2
При изменении плотности вещества величина
_ 1 п2 - 1
которая называется удельной рефракцией, должна оставаться посто-
постоянной.
10 А. Д. Полянин, В. Д. Полянин и др.
290 Оптика
> Рассеяние света. Ослабление волны. Интенсивность волны
в среде уменьшается не только из-за поглощения света, но и вслед-
вследствие его рассеяния. Рассеяние объясняется излучением света атом-
атомными осцилляторами, которое происходит по всем направлениям (см.
разд. 4.5). Однако в идеально однородной среде свет, рассеянный мо-
молекулами, находящимися на расстоянии А/2 друг от друга, испыты-
испытывал бы полное интерференционное гашение, и ослабление за счет рас-
рассеяния в этом случае отсутствовало бы. Рассеяние наблюдается на ма-
малых инородных частицах (тиндалевское рассеяние в мутных средах)
и на неоднородностях, возникающих вследствие флуктуации плотно-
плотности (рэлеевское рассеяние).
Интенсивность света, рассеянного на неоднородностях, размеры
которых малы по сравнению с длиной волны, пропорциональна А~4
[закон Рэлея, см. также разд. 4.5). Этим объясняется голубой цвет не-
неба (рассеянный солнечный свет) и желто-красный цвет солнца (прохо-
(проходящий свет). Степень поляризации рассеянного естественного света
зависит от угла рассеяния; свет, рассеянный под углом тг/2, оказыва-
оказывается полностью поляризованным. Качественное объяснение состоит
в том, что в этом направлении излучают только осцилляторы, напра-
направление колебаний которых перпендикулярно направлению рассеяния.
Рассеяние на неоднородностях, больших по сравнению с длиной вол-
волны, слабо зависит от частоты; этим объясняется белый цвет облаков.
Рэлеевское рассеяние на флуктуациях плотности или концентра-
концентрации зависит от температуры. При приближении к критической точке
средние размеры флуктуации резко возрастают и наблюдается белое
помутнение жидкости, называемое критической опалесценцией.
Ослабление пучка света при не очень большой интенсивности
происходит по экспоненциальному закону (закону Бугера):
1 — ioe ,
где коэффициент ослабления а равен сумме коэффициента поглоще-
поглощения, который выражается через мнимую часть показателя преломле-
преломления (см. формулу A7)), и коэффициента рассеяния, который описы-
описывает ослабление волны из-за рассеяния.
5.6*. Тепловое излучение
> Равновесное тепловое излучение. Излучение электромагнит-
электромагнитной (лучистой) энергии телом за счет энергии хаотического (те-
(теплового) движения его молекул называется тепловым излучением.
Свойства теплового излучения определяются материалом тела и его
температурой. Если из любого материала сделать замкнутую по-
полость и поддерживать температуру ее стенок постоянной, то система
5.6. Тепловое излучение 291
(стенка -f излучение) придет в состояние термодинамического рав-
равновесия, и в объеме полости установится равновесное тепловое из-
излучение. Важнейшая особенность равновесного излучения состоит в
том, что его свойства полностью определяются температурой стенок
и не зависят от их материала. Это утверждение является следствием
второго начала термодинамики. Кроме того, равновесное излучение
однородно и изотропно.
Основные характеристики как излучения с поверхности тела, так
и излучения в объеме были введены в разд. 5.1. Излучение с поверх-
поверхности характеризуется энергетической яркостью В и энергетической
светимостью Я, равной количеству лучистой энергии, излученной с
единицы поверхности за единицу времени по всем направлениям (т.е.
в телесный угол 2тг). Вводятся также спектральные разложения энер-
оо
гетической светимости гл, гы, г^, например, R— f гл d\\ величины г
о
называются излучателъными способностями тела. Излучение в объ-
объеме характеризуется интенсивностью лучистого потока / и объемной
плотностью лучистой энергии и, а также их спектральными разложе-
разложениями. В случае изотропного излучения они связаны соотношением
и = 4тг//с. Освещенность Е определяется как полный лучистый по-
поток через единичную площадку со всех направлений (из телесного
угла 2тг); в случае изотропного излучения выполняются соотношения
Е = тг/ = \си.
Спектральные плотности освещенности Е обозначим еЛ, е„ иёш. Пе-
Пересчет от одной спектральной характеристики к другой обсуждается
в разд. 5.1.
> Поглощательная способность. Закон Кирхгофа. Поглоща-
тельной способностью тела называется доля падающей лучистой
энергии, поглощенная телом (для узкого интервала длин волн или
частот):
а _ <
л"
Тело, для которого аЛ = 1 во всем спектральном интервале, называ-
называется абсолютно черным телом. Моделью черного тела может слу-
служить замкнутая полость с небольшим отверстием; почти все лучи,
Попадающие в полость через отверстие, в результате многократных
отражений от внутренних стенок оказываются поглощенными. Тело,
У которого аЛ = const < 1, называют серым.
Так как равновесное излучение находится в равновесии с поверх-
поверхностью, то для любого спектрального интервала количество погло-
поглощенной лучистой энергии, равное еЛаЛ с?А, должно быть равно количе-
количеству излученной энергии, равному гЛ d\. Поскольку характеристики
292 Оптика
равновесного объемного излучения не зависят от свойств конкретно-
конкретного тела, то отношение излучательной способности любого тела к его
поглощательной способности оказывается универсальной функцией
длины волны и температуры (закон Кирхгофа):
^ = ex(T) = jcux(T). A9)
Л
Поскольку для абсолютно черного тела поглощательная способность
равна единице, то стоящая справа функция есть не что иное, как
излучательная способность абсолютно черного тела, которую обо-
обозначим г\\
Видно, что излучательная способность абсолютно черного тела и его
энергетическая светимость не зависят от способа его изготовления;
они связаны с объемной плотностью энергии соотношениями
rx(T) = \cux(T), R-(T) = \cu(T). B0)
При одной и той же температуре абсолютно черное тело обладает
самой большой излучательной способностью и энергетической свети-
светимостью. Например, для серого тела R = aR*. Отметим, что поскольку
равновесное излучение изотропно, черное тела является ламбертов-
ским источником (см. разд. 5.1).
> Законы Стефана — Больцмана и Вина. Излучательная спо-
способность абсолютно черного тела при данной температуре стремит-
стремится к нулю при малых и больших А и достигает максимального значе-
значения при некоторой длине волны Ат, которая зависит от температу-
температуры. Площадь под кривой rj равна энергетической светимости R*(T).
Применение к равновесному излучению в полости общих соотноше-
соотношений термодинамики позволило получить для него ряд общих соот-
соотношений. (Температура равновесного теплового излучения считается
равной температуре стенок.) Закон Стефана — Больцмана утвер-
утверждает, что энергетическая светимость абсолютно черного тела про-
пропорциональна четвертой степени температуры:
Л*=(тГ4, B1)
где а = 5,67 • 10~8 Вт • м~2К~4 — постоянная Стефана — Больцмана.
Для вывода B1) надо воспользоваться выражением для давления изотропного
излучения р ;= и/3 (см. разд. 2.5) и формулой (-§хг)г = {-§r)v ~ Р> которая
является следствием второго начала термодинамики (разд. 2.3). Подставляя
U = и(Т)V, придем к уравнению Аи = du/dT, откуда получим и ~ Т . Кроме того,
из формулы для давления и из первого начала термодинамики @ = d(uV) -f -g- и dVj
5.6. Тепловое излучение
293
можно для равновесного излучения вывести уравнение адиабатического процесса:
иУА13 = const. Отсюда с учетом и ~ Т4 получим VT3 = const.
Если рассмотреть медленное адиабатическое изменение объема
излучения, заключенного в сосуд с зеркальными стенками, и приме-
применить к отражению света от движущегося зеркала формулу эффекта
Доплера (см. разд. 4.4, 4.5), то удается доказать формулу Вина:
или
B2)
где f{(x) — неизвестные функции, вид которых не может быть
установлен в рамках термодинамики. Аналогичные выражения для г?
имеют вид
или г: = Т3<р2{и/Т).
B3)
Из формулы Вина B2) (или B3))
можно вывести закон Стефана —
Больцмана B1). Кроме того, из
этих формул следует закон смеще-
смещения Вина, выражающий зависимость
положения максимума функции г?
(или г?) от температуры:
\mT =
B4)
Рис. 78.
где Ь = 2,9 • 10~3 м • К — постоян-
постоянная Вина. Например, при уменьше-
уменьшении температуры в два раза положе-
положение максимума функции г^ (или иш) становится в два раза ближе
к началу координат, а сам максимум становится в восемь раз ниже
(рис. 78); площадь под графиком уменьшается при этом в 16 раз.
> Формула Рэлея — Джинса. Рэлей и Джине предприняли по-
попытку получить вид функции иш в рамках классической статистиче-
статистической физики. Они рассмотрели излучение в полости как ансамбль сто-
стоячих электромагнитных волн, случайным образом обменивающихся
энергией со стенками и между собой. С точки зрения статистики,
каждая независимая стоячая волна, имеющая некоторую частоту ко-
колебаний, эквивалентна осциллятору с такой же частотой. Вычисление
энергии сводится к двум независимым вопросам:
1) Какое число dN осцилляторов (стоячих волн) приходится на
интервал частот duj? Ответ должен выражаться в виде функции G(u>),
которую называют плотностью состояний: dN = VG(uj) duj, где V —
объем сосуда.
Для вычисления G(u>) можно рассмотреть сосуд в форме прямоугольного па-
параллелепипеда cq сторонами Lx, Ly, Lz. Граничные условия (например, требо-
требование, чтобы на границах находились узлы стоячих волн) приводят к условиям
294 ¦ Оптика
A^Z/? = т^тг (? = x,y,z). Значит, в пространстве волновых векторов допустимые
состояния соответствуют узлам решетки со сторонами тг/L^ и объемом ячейки.
S = 7г3/(LxLyLz) = тг3/У. Объем /^-пространства, соответствующий изменению ве-
величины волнового вектора от к до к + dk, равен. — Dтгк2 dk) (объем сферического
слоя, отсекаемый первым квадрантом). Разделив на объем ячейки, получим число
к2 dk
пространственно различных колебаний в интервале dU: dN = V —. Необходи-
Необходимо также учесть дополнительные степени свободы (в случае электромагнитных
волн — два возможных состояния поляризации), которые для общности учтем
дополнительным множителем д.
Найдем число состояний на единицу объема:
dN Pdk .
B5)
Эта формула получена из граничных условий и имеет очень общий
характер и многочисленные применения. Для перехода к uj надо
учесть* соотношение к = и/с. Окончательно получим
2) Чему равна средняя энергия одного осциллятора?
Классическая физика дает следующий ответ (см. разд. 2.2): каж-
каждому осциллятору, независимо от его частоты, надо приписать две
степени свободы, ив соответствии с теоремой о равнораспределе-
равнораспределении энергии, средняя энергия каждого осциллятора должна быть рав-
равна кТ, где к— постоянная Больцмана.
В результате таких рассуждений классическая физика приводит
к формуле Рэлея —Джинса:
^f B7)
Опыт показывает, что формула Рэлея — Джинса хорошо выполняется
на малых частотах (при uj <C шт), но абсолютно неверна на больших
(рис. 78). Действительно, хотя B7) удовлетворяет требованиям, на-
налагаемым на любую возможную функцию иш формулой Вина B3), но
сразу видно, что полученная функция не имеет максимума; она моно-
и>
тонно возрастает, и интеграл f ишAи>, т.е. полная энергия излучения,
о
равен бесконечности! Эта ситуация стала одним из признаков глубо-
глубокого кризиса классической физики и была названа современниками
ультрафиолетовой катастрофой.
> Формула Планка. Теорема о равнораспределении энергии явля-
является следствием того, что классическая энергия осциллятора, про-
пропорциональная квадрату его амплитуды, может принимать любые, в
5.6. Тепловое излучение 295
том числе очень маленькие значения. Согласно квантовой гипотезе
Планка энергия осциллятора (отсчитываемая от минимального зна-
значения) может принимать только дискретные значения, кратные не-
некоторой величине, зависящей от частоты осциллятора:
еп{и)=пе1(и), п = 0,1,... B8)
Для вычисления средней энергии можно использовать формулу Макс-
Максвелла— Больцмана (см. разд. 2.5), согласно которой вероятность со-
состояния с энергией е пропорциональна ехр[—е/(кТ)\. Получаем
(ф)> ^
?
п=0
Ряд в знаменателе есть просто сумма геометрической прогрес-
прогрессии, а числитель получается из знаменателя дифференцированием
по 1/(кТ). Проведя вычисления, имеем
С(Ы)(е(ш))^^Ш-. B9)
Сравнение с формулой Вина B3) показывает, что ех — s^uj) должна
быть пропорциональна и:
e1(u>) = hu>, C0)
где h — /г/Bтг) = 1,05 • 10~34 Дж • с — универсальная постоянная, назы-
называемая постоянной Планка. Так как энергия кванта пропорциональ-
пропорциональна частоте осциллятора, то при данной температуре колебания вы-
высоких частот возбуждаются с очень малой вероятностью и их вклад
в энергию излучения оказывается ничтожно малым. Это разрешает
проблему ультрафиолетовой катастрофы.
После подстановки C0) в формулу для средней энергии получим
формулу Планка для спектральной плотности энергии:
График этой функции приведен на рис. 78. Запишем формулу Планка
также в переменных v и Л:
8тг/гс Г / he \ J /ооЧ
ЬЬИ C2)
^=гУ1] ¦ и*=
При huj <C kT формула Планка переходит в формулу Рэлея — Джин-
Джинса B7). Из формулы Планка можно получить выражения для постоян-
постоянных Стефана — Больцмана и Вина через универсальные постоянные:
во
Формула Планка очень хорошо согласуется с экспериментом во всем
диапазоне частот.
296
Оптика
U
Рис. 79.
5.7. Световые кванты
> Фотоэффект. Внешним фотоэффектом называют вырывание
электронов из вещества под действием света. Для изучения фотоэф-
фотоэффекта используют вакуумную лампу с холод-
холодным катодом (в этом случае термоэлектрон-
термоэлектронную эмиссию можно не учитывать). Облучая
Лшс катод светом фиксированной частоты и ин-
интенсивности, снимают вольтамперную харак-
характеристику лампы (зависимость тока от анод-
анодного напряжения). По вольтамперной харак-
характеристике (рис. 79) узнают: а) число электро-
электронов, вырываемых из катода в единицу време-
времени (оно выражается через ток насыщения: N = /нас/е) и б) макси-
максимальную кинетическую энергию вырываемых электронов; она выра-
выражается через задерживающее напряжение, т.е. анодное напряжение,
при котором ток обращается в нуль:
±-mv2 = e ?/зад.
При этом напряжении даже самые быстрые электроны не могут
долететь до анода.
Первый закон фотоэффекта: количество электронов, вырывае-
вырываемых светом из металла в единицу времени, прямо пропорционально
интенсивности световой волны.*
?#,ппТ у Второй закон фотоэффекта: макси-
максимальная кинетическая энергия фотоэлек-
фотоэлектронов линейно возрастает с частотой све-
света и не зависит от интенсивности све-
света. Если частота света меньше определен-
определенной для данного вещества минимальной ча-
чбых / стоты уш, то фотоэффект не наблюдает-
наблюдается (красная граница фотоэффекта). Экс-
Рис. 80. периментально было обнаружено, что за-
зависимость е[/зад от v Для Данного металла
имеет вид наклонной прямой, причем наклон прямых, построенных
для разных металлов, оказался одинаковым (рис. 80).
Классическая волновая теория света не смогла объяснить второй
закон фотоэффекта. Кроме того, в рамках этой теории выглядело не-
необъяснимым полное отсутствие задержки между началом облучения
и возникновением тока.
Законы фотоэффекта были открыты Столетовым.
5.7. Световые кванты 297
*> Кванты света. Объяснение законов фотоэффекта было дано
Эйнштейном. Он опирался на квантовую гипотезу Планка (разд. 5.6),
но пошел гораздо дальше, предположив, что кванты световой энергии
поглощаются целиком отдельными электронами. Это означает, что в
процессе поглощения свет ведет себя как локализованная частица (ее
назвали фотоном) с энергией
Е„ = к1/ = Гш> = кс/\. C3)
Как любая безмассовая частица, движущаяся со скоростью света,
квант света — фотон — обладает импульсом
. Pl/ = EJc=hv/c=h/\. C4)
Связь между энергией и импульсом безмассовой частицы дается
теорией относительности (см. разд. 1.11).
Квантовые свойства света проявляются при испускании, погло-
поглощении и рассеянии света. В явлениях, связанных с распространением
света, проявляются его волновые свойства. Свет обладает двойствен-
двойственной природой (корпускулярно-волновой дуализм). Такие же свойства
проявляют все элементарные частицы.
Фотоэффектом (актом фотоэффекта) называется поглощение
фотона какой-нибудь частицей, например электроном. В результате
фотоэффекта квант света исчезает, а электрон приобретает допол-
дополнительную энергию. Если фотоэлектрон вылетает из вещества, то
наблюдается внешний фотоэффект; если остается внутри, то имеет
место внутренний фотоэффект. При внутреннем фотоэффекте элек-
электроны могут переходить из связанного состояния в свободное, в ре-
результате чего увеличивается число носителей тока и, следовательно,
уменьшается сопротивление. Фотоэффект используется при создании
фотоэлементов, фотореле и т.д.
Пример 1. Может ли происходить фотоэффект на свободном электроне?
Решение. Нет, не может, так как при этом не могут одновременно выпол-
выполняться законы сохранения энергия и импульса. Это становится очевидным, если
перейти в инерциальную систему отсчета, в которой электрон после фотоэффекта
покоится. До фотоэффекта в системе были квант света и движущийся электрон, а
после фотоэффекта — только неподвижный электрон, т.е. энергия не сохраняется.
Поглощая квант света, электрон приобретает энергию hi/. При
вылете из металла энергия каждого электрона уменьшается на опре-
определенную величину, которую называют работой выхода Авых (рабо-
(работа, которую необходимо затратить, чтобы удалить электрон из ме-
металла; работа выхода зависит от рода вещества). Максимальная энер-
энергия электронов после вылета (если нет других потерь) имеет вид
\mv2 = hu-ABbn C5)
298 Оптика
(уравнение Эйнштейна). Если hi/ < Авых, то внешний фотоэффект не
происходит. Значит, красная граница фотоэффекта равна
Из C5) видно, что наклон прямых на графике е11зад от v (рис. 80)
равен Л, а отрезок, отсекаемый прямой от оси ординат, равен работе
выхода.
Энергию фотонов и работу выхода принято выражать во внеси-
внесистемных единицах — электронеольmax (эВ). Один эВ равен энергии,
приобретенной электроном при прохождении им разности потенци-
потенциалов — 1 В: 1 эВ = 1,6022 • 10~19 Дж. Если, например, задерживаю-
задерживающее напряжение равно —3,5 В, то максимальная кинетическая энер-
энергия электронов равна 3,5 эВ.
Пример 2. Существование работы выхода означает, что на границе металла
возникают силы, удерживающие электрон внутри металла. Как объяснить при-
притяжение электрона к электронейтральному металлу?
Решение. Заряженная частица притягивается наведенными на поверхности
проводника зарядами противоположного знака. Сила притяжения вычисляется
с помощью метода электростатических изображений (разд. 3.5). Вылетающие и
возвращающиеся электроны образуют возле поверхности отрицательно заряжен-
заряженное облако, а их изображения — положительно заряженный слой внутри металла.
Между заряженными слоями существует ненулевая средняя напряженность поля,
направленная наружу.
> Граница рентгеновского спектра. Если электроны разогнать
в вакуумной трубке, к электродам которой приложено напряжение
в несколько киловольт, то при ударе электронов об анод возника-
возникает тормозное рентгеновское излучение. Исследование спектра это-
этого излучения показывает, что в нем отсутствуют длины волн, мень-
меньшие некоторого значения Лк, которое обратно пропорционально при-
приложенному к трубке напряжению. Этот факт находит естественное
объяснение в квантовой оптике. Энергия излученного фотона не мо-
может превысить кинетическую энергию электрона: hc/X ^ е?7, откуда
получим
Л>Л --*!
А ** А* - eU •
Теоретическое значение коэффициента пропорциональности между
Лк и 1/U хорошо согласуется с экспериментом.
> Давление света. Давление света было предсказано Максвеллом
на основе электромагнитной теории и измерено Лебедевым. Установ-
Установка Лебедева состояла из легкого стержня, подвешенного в вакууме
на тонкой нити. По краям стержня были закреплены две тонких пла-
пластинки— одна отражающая, другая поглощающая. Освещая пластин-
пластинки и измеряя закручивание нити, он вычислял световое давление.
Электромагнитная теория давала следующее объяснение светово-
световому давлению: электрическое поле электромагнитной волны вызывает
5.7. Световые кванты 299
в металле ток, на который действует сила Ампера со стороны маг-
магнитного поля волны; эта сила направлена в сторону распростране-
распространения волны и является причиной светового давления. Гораздо проще
выглядит объяснение давления на языке световых квантов: фотоны,
каждый из которых обладает импульсом C4), поглощаются или от-
отражаются, передавая свой импульс веществу. При отражении фотона
переданный импульс в два раза больше, чем при поглощении (см. так-
также разд. 4.5).
> Эффект Комптона. При взаимодействии фотона со свободным
электроном процесс поглощения фотона запрещен законами сохране-
сохранения, но может происходить рассеяние фотона. Если первоначально
электрон покоился, то в результате взаимодействия он приобретет
некоторую скорость. Закон сохранения энергии требует, чтобы энер-
энергия фотона уменьшилась на величину кинетической энергии электро-
электрона, что означает, что должна уменьшиться его частота. В то же вре-
время с точки зрения волновой теории частота рассеянного света долж-
должна совпадать с частотой падающего. Это явление называется эффек-
эффектом Комптона, оно было обнаружено при рассеянии рентгеновских
лучей и сыграло важную роль в утверждении квантовых представ-
представлений.
Рассеяние фотона на электроне можно рассматривать как упру-
упругое соударение двух частиц, подчиняющееся законам сохранения
энергии и импульса:
рс+тс2 = р}с + Е'е, Р = р'+&,
где р и р1 — начальный и конечный импульсы фотона, р'е и Е'е —
импульс и энергия электрона отдачи. Выразим энергию и импульс
электрона отдачи и подставим в соотношение Е'е2 — р'е2с2 = т2с4 (см.
разд. 1.11). После преобразований имеем
тс(р — р1) = pp'(l — cos0),
где в — угол рассеяния фотона (угол между векторами р и р1).
Выразив из уравнения C4) импульсы падающего и рассеянного
фотона: р — /г/Л, р' = /г/Л', получим формулу для зависимости эффекта
Комптона от угла рассеяния:
А'-А = Ac(l-cos0).
Величина Лс = /г/гас = 2,43 • 10~12 м называется комптоновской
длиной волны электрона. Энергия фотона с длиной волны Лс равна
энергии покоя электрона тс2. Максимальный эффект соответствует
рассеянию фотона на угол в = тг.
300 СПИСОК ЛИТЕРАТУРЫ
Список литературы
Бейзер А. Основные представления современной физики. — М.: Атомиздат,
1973. —548 с.
Дубровский И. М., Егоров Б. В., Рябошапка К. П. Справочник по физике.—
Киев: Наукова думка, 1986. — 558 с.
Енохович А. С. Справочник по физике.— М.: Просвещение, 1978.— 512 с.
Иродов И. Е. Задачи по общей физике. — М.: Наука, 1988. — 416 с.
Иродов И. Е. Основные законы механики.— М.: Высшая школа, 1985.— 248 с.
Иродов И. Е. Основные законы электромагнетизма. — М.: Высшая школа, 1991.—
288 с.
Калашников С. Г. Электричество.— М.: Наука, 1985.— 576 с.
Кикоин А. К., Кикоин И. К. Молекулярная физика. — М.: Наука, 1976. — 480 с.
Киттелъ Ч., Найт В., Рудерман М. Механика. — М.: Наука, 1975. — 480 с.
Кошкин Н. И., Ширкевич М. Г. Справочник по элементарной физике. — М.:
Наука, 1988. — 256 с.
Курс физики / Под ред. Папалекси Н. Д., тт. 1, 2. — М.: Гостехиздат, 1948.
Кухлинг X. Справочник по физике. — М.: Наука, 1982. — 520 с.
Лансберг Г. С. Оптика. —М.: Наука, 1976. —926 с.
Матвеев А. Н. Механика и теория относительности. — М.: Высшая школа,
1986. —320 с.
Матвеев А. Н. Молекулярная физика. — М.: Высшая школа, 1981. — 400 с.
Матвеев А. Н. Электричество и магнетизм. — М.: Высшая школа, 1983. — 463 с.
Орир Док. Физика, тт. 1, 2. — М.: Мир, 1981.
Парселл Э. Электричество и магнетизм. — М.: Наука, 1971. — 448 с.
Савельев И. В. Курс физики. Т. 1. Механика. Молекулярная физика. — М.: Наука,
1989. —350 с.
Савельев И. В. Курс физики. Т. 2. Электричество и магнетизм. — М.: Наука,
1989. —496 с.
Савельев И. В. Курс физики. Т. 3. Квантовая физика. — М.: Наука, 1989. — 301 с.
Сивухин Д. В. Механика. — М.: Наука, 1989. — 576 с.
Сивухин Д. В. Термодинамика и молекулярная физика. — М.: Наука, 1990. — 592 с.
Сивухин Д. В. Электричество.—М.: Наука, 1991. — 688 с.
Сивухин Д. В. Оптика. —М.: Наука, 1992.— 752 с.
Стрелков С. П. Механика. — М.: Наука, 1975. — 560 с.
Таблицы физических величин, справочник / Под ред. И. К. Кикоина. — М.:
Атомиздат, 1976. — 1008 с.
Фейнман Р., Лейтон Р., Сэндс. М. Фейнмановские лекции по физике,
тт. 1 — 9. — М.: Мир, 1965 — 1967.
Физическая энциклопедия / Под ред. А. М. Прохорова, тт. 1 — 4. — М.: Сов.
энциклопедия, 1988—1995.
Физический энциклопедический словарь / Под ред. А. М. Прохорова. — М.: Сов.
энциклопедия, 1983. — 928 с.
Хайкин С. Э. Физические основы механики. — М.: Наука, 1971.— 752 с.
Яворский Б. М., Детлаф А. А. Справочник по физике. — М.: Наука, 1985. — 512 с.
Яворский Б. М., Детлйф А. А. Справочник по физике для инженеров и студентов
вузов. — М.: Наука, 1974.-—942 с.
ТЕОРЕТИЧЕСКАЯ
МЕХАНИКА
Основные обозначения
А — работа;
а — абсолютная величина ускорения, а = |а| = л/а2 + а« + а|;
а — ускорение, а = {ах, ау1 а2};
, ау, az — компоненты ускорения в декартовой системе координат;
ап, ат — нормальное и касательное ускорения;
а-Ь — скалярное произведение векторов;
а X 6 — векторное произведение векторов;
F — сила;
/0 — статический коэффициент трения;
/ — динамический коэффициент трения;
Iz — момент инерции относительно оси z;
Кр — момент количества движения относительно центра Р, КР = г X mv;
М — момент силы, момент пары сил;
га — масса материальной точки, масса тела;
W — сила нормального давления;
Q — количество движения (количество движения материальной точки:
<? = mv);
R — главный вектор системы сил, R = У] Fk;
R* — равнодействующая;
гР — радиус-вектор, проведенный из точки Р;
!5 — импульс силы;
Т — кинетическая энергия, Т = -^-rav2;
t — время;
v — абсолютная величина скорости, v = \v\ = x/v? + v\ + vf;
v — скорость, v = {vx, vy, vz};
, vy, vz — компоненты скорости в декартовой системе координат;
а:, у, z — декартовы координаты; '
* ... dx .. d2x
. х\ х — первая производная, х = ; вторая производная, х = ——;
at dtz
Ф — сила инерции;
ip — угловая координата;
ш — угловая скорость;
е — угловое ускорение.
302
Кинематика
1. Кинематика
Кинематика —раздел механики, в котором изучаются геометри-
геометрические свойства движения точки или тела вне зависимости от их мас-
массы и причин, вызывающих это движение.
1.1. Кинематика точки
Задать движение точки — значит задать правило, в соответствии
с которым можно указать положение точки в каждый момент вре-
времени. Наиболее распространенными и удобными способами задания
движения точки являются: векторный, координатный и естествен-
естественный.
> Векторный способ задания движения точки. Положение
точки М задается радиусом-вектором rp{t), проведенным в нее из
неподвижного центра (полюса) Р (рис. 1). Радиус-вектор является
векторной функцией скалярного аргумента — времени t, с течением
времени конец вектора гр описывает в пространстве кривую, кото-
которая называется траекторией точки.
Наряду с радиусом-вектором кинема-
кинематическое состояние точки М характе-
характеризуют векторы скорости v(t) и ускоре-
ускорения a(t).
Скорость точки v = •
' ~Гг
-век-
тор производной по времени от радиуса-
вектора, характеризует быстроту и на-
направление изменения положения точки в
пространстве. Вектор скорости напра-
направлен по касательной к траектории в точ-
точке М.
Ускорение точки a — v = rp —вектор
первой производной по времени от вектора скорости, или второй про-
производной от радиуса-вектора. Ускорение удобно представить в виде
суммы двух векторов аТ и ап, расположенных в плоскости, образуе-
образуемой векторами v и а:
Рис. 1.
Вектор аТ направлен параллельно v и называется касательным
(тангенциальным) ускорением, а вектор ап направлен перпендику-
перпендикулярно а Т в сторону вогнутости траектории и называется нормальным
ускорением.
Величины ат и ап можно найти по формулам
а - v d . , „ j-z , _чо
а =
а" =
1.1. Кинематика точки 303
где а - v — скалярное произведение векторов а и v.
р> Координатный способ задания движения точки. Положе-
Положение точки в пространстве задается тремя функциями времени
* = *(*).. У = У(*)> * = *(*), A)
где х, у, z — декартовы координаты точки М. Этот способ является
другим представлением векторного, так как радиус-вектор г0, вы-
выходящий из начала координат, можно представить в виде векторной
суммы
где г, j, к — единичные векторы (орты), направленные вдоль коорди-
координатных осей х, у, z (рис. 1).
Проекции скорости на оси координат vxi vy, vz определяются
дифференцированием по времени соответствующих функций A):
Vx = *> Vy = У| Vz - *• B)
Вектор скорости находится в виде геометрической суммы трех
векторов:
v = vj+vyj + vxic,
а модуль скорости — по формуле
М = y/vl + vl + vl C)
Проекции ускорения на оси координат ах, ау, аг, ускорение а, a
также его модуль \а\ находятся по формулам
-* ID)
а - ахг + ayj + azk, \a\ = j2 + 2 + \
Значение касательного ускорения вычисляется при помощи выра-
выражения
ix + yy + iz
\/i2 + y2 + i2 1 ;
При ат > 0 движение точки называется ускоренным, так как
модуль скорости \v\ является в данный момент времени возрастающей
функцией. При ат < 0 движение называется замедленным.
> Естественный способ задания движения точки. Положение
точки в пространстве определяется заданием:
а) траектории точки;
б) начала отсчета на траектории (точки О, от которой будет
отсчитываться дуговая координата s);
304 Кинематика
в) положительного направления отсчета дуговой координаты;
г) закона движения точки s = s(t) — зависимости ее дуговой
координаты от времени.
Дуговая координата s — это длина дуги траектории, отсчитыва-
отсчитываемая от точки О до точки М. Если отсчет длины ведется в положи-
положительном направлении, то значение дуговой координаты положитель-
положительно, а в противоположном случае — отрицательно.
Естественные оси координат наиболее удобны для изучения дви-
движения точки, заданного естественным способом. Сначала в точке М
Q строится соприкасающаяся окружность, ко-
* *~- торая из всех мыслимых окружностей, про-
проходящих через точку М, наиболее плотно
смыкается с траекторией (рис. 2). Центр
этой окружности называется центром кри-
кривизны траектории, а ее радиус р — радиусом
кривизны траектории в точке М. Величина
к — 1/р называется кривизной траектории.
На пологих участках траектории значения р
больше, чем в точках искривленных участ-
участков, а к, наоборот, —.меньше. Плоскость, в которой лежит сопри-
соприкасающаяся окружность, называется соприкасающейся плоскостью,
и часть траектории в окрестности точки М «практически» лежит в
этой плоскости.
Естественными осями координат называются три взаимно пер-
перпендикулярные оси: касательная к траектории в точке М, направлен-
направленная в сторону возрастания дуговой координаты s; главная нормаль,
лежащая в соприкасающейся плоскости и направленная к центру кри-
кривизны; бинормаль, перпендикулярная соприкасающейся плоскости и
направленная так, что если посмотреть навстречу ее положительному
направлению, ближайший поворот; от касательной оси к оси главной
нормали кажется происходящим против хода часовой стрелки. Еди-
Единичные векторы (орты) обозначаются соответственно т, п, Ь (рис. 2),
они образуют правую тройку. По построению v \\ т и a JL Ь.
Используя естественные оси координат, векторы скорости и уско-
ускорения точки М можно записать в виде
v — vt, а — ат + ап — атт+ апп,
v — s, ат — v — s, ап — v2/ р.
Величина v называется алгебраическим значением скорости и
может быть как меньше, так и больше нуля. При положительном
значении v скорость точки направлена в сторону положительного
отсчета дуговой координаты. Абсолютное значение v равно модулю
скорости \v\. Аналогично ат называется алгебраическим значением
1.1. Кинематика точки
305
касательного ускорения, и, например, при ат < 0 вектор а т направлен
в сторону отрицательного отсчета дуговой координаты.
При одинаковых знаках v и ат движение точки в рассматрива-
рассматриваемый момент времени ускоренное, при разных — замедленное. Нор-
Нормальное ускорение равно нулю при движении точки по прямолиней-
прямолинейному участку траектории. Касательное ускорение точки равно нулю,
когда при движении точки алгебраическое значение величины скоро-
скорости остается постоянным.
Равнопеременным движением точки на-
называется движение, при котором ат = aQ =
= const. В этом случае алгебраическое зна-
значение скорости и дуговая координата могут
быть найдены по формулам
Здесь v0 и sQ — алгебраическое значение ско-
скорости и дуговая координата, соответствую-
соответствующие моменту времени tQ. Рис. 3.
Равномерным называется такое движение точки, при котором
ат = 0.
В общем случае дуговая координата s и пройденный точкой
путь D могут быть найдены по формулам:
= / vdt, D= I \v\
Jtn Jtn
dt.
Отсюда видна разница между дуговой координатой и путем,
пройденным точкой.
Пример. Линейка АВ эллипсографа длиной 21 = 2 м (рис. 3) движется так,
что угол ip (в радианах) изменяется по закону <р = — ^t2 -\-2t-\- -^— -у. При этом
точка В линейки движется по горизонтальной прямой, а точка А — по верти-
вертикальной. Найти траекторию точки С, лежащей на середине линейки, а также ее
скорость, ускорение и радиус кривизны траектории при t = 1 с.
Решение. Перейдем сначала к ранее рассмотренному координатному спосо-
способу задания движения. Введем оси координат, как указано на рисунке, после чего
найдем хс = /sine/?, yc = /cosy». Возводя в квадрат правые и левые части урав-
уравнений движения и складывая их почленно, получим уравнение траектории
откуда следует, что точка С движется по окружности радиуса /.
Воспользовавшись затем формулами B) — F) и учитывая, что моменту
306
Кинематика
времени t = 1 с соответствуют ip = тг/6, ф=1с 1,у> = —1с 2, найдем
"^Сх = % с = Icosyxp = 0,87 м/с,
lvcl = \Ac* + "су = 1 м/с'
аСх = г/Сх = /(—sinуф2 +.cosy><?) = —1,37м/с ,
аСу = г/Сг/ = /(— cos^pCp2 — sinyv1) = —0,37 м/с2,
7+^b = 1.41 м/с2,
(8)
причем последний результат очевиден заранее, исходя из полученного уравнения
траектории.
1.2. Кинематика твердого тела
Теорема: проекции скоростей двух точек твердого тела на пря-
прямую, их соединяющую, равны (рис. 4).
Эта теорема справедлива для про-
произвольного движения тела и утвержда-
утверждает, что проекции должны быть равны
и по величине, и по направлению.
Простейшие движения твердого те-
тела: поступательное и вращение вокруг
Рис. 4.
неподвижной оси.
> Поступательное движение. Движение твердого тела называ-
называется поступательным, если любая прямая, проведенная в нем, при
движении остается параллельной своему первоначальному направле-
направлению. Свойства поступательного движения: траектории всех точек
твердого тела при наложении совпадают, скорости и ускорения всех
точек тела одинаковы в каждый момент времени:
где А к В — любые точки.
> Вращение вокруг неподвижной оси. При вращении твердого
тела вокруг неподвижной оси, называемой осью вращения, его точ-
точки, лежащие на оси, остаются неподвижными. Через ось проведем две
плоскости — неподвижную и подвижную, в которой находится точ-
точка тела, скорость и ускорение которой необходимо найти. Двугран-
Двугранный угол (р между подвижной и неподвижной плоскостями называ-
называется углом поворота тела, он измеряется в радианах. Угол поворота
1.2. Кинематика твердого тела
307
считают положительным, когда он отсчитывается от неподвижной
плоскости к подвижной против хода часовой стрелки, если смотреть
навстречу положительному направлению оси вращения. Чтобы было
известно положение тела (и каждой его точки) в любой момент вре-
времени, необходимо знать зависимость угла <р от времени t:
Это уравнение выражает закон вращения твердого тела вокруг
неподвижной оси.
Вместе с функцией (p(t) ее первая и вторая производные по
времени характеризуют кинематическое состояние твердого тела в
рассматриваемый момент времени
где lj —угловая скорость тела, е — его угловое ускорение.
Траекторией произвольной точки М твердого тела является окру-
окружность, радиус которой R называется радиусом вращения точки.
На рис. 5 эта окружность изображена
со стороны положительного направле-
направления оси вращения. Знак и указывает на-
направление вращения: если он положите-
положителен, то вращение происходит против хо-
хода часовой стрелки. Угловую скорость
и угловое ускорение удобно изображать
при помощи дуговых стрелок с учетом
их знаков. Если знаки ш и е одинаковы,
то говорят, что вращение ускоренное,
если знаки разные — замедленное.
Вращение твердого тела называется
равнопеременным^ когда е = е0 — const. Рис. 5.
В этом случае зависимости угла поворота и угловой скорости от вре-
времени даются формулами
аналогичными формулам для равнопеременного движения точки G).
Равномерное вращение твердого тела является частным случаем
равнопеременного, когда е0 — const = 0.
В общем случае при вращении твердого тела вокруг неподвижной
оси модуль скорости точки М находится по формуле
v =
(9)
308 Кинематика
при этом скорость направлена по касательной к окружности, т.е. пер-
перпендикулярно к радиусу, и ее направление согласовано с направлени-
направлением дуговой стрелки и. Величины касательного, нормального и пол-
полного ускорения можно найти по формулам, являющимся частными
случаями формул F):
Вектор касательного ускорения ат направлен по касательной к
окружности, и его направление согласовано с направлением дуговой
стрелки ?, вектор ап направлен по радиусу R к центру окружности.
Острый угол jji между а и R можно найти по формуле
при этом направление ближайшего поворота от а к R будет согласо-
согласовано с направлением дуговой стрелки е.
Величины и, ?, /i, входящие в последние формулы, одинаковы для
всех точек тела и характеризуют кинематическое состояние тела в
целом.
Из формул следует, что векторы ьи а разных точек тела, лежащих
на одном радиусе, параллельны между собой и линейно зависят от
расстояния до оси вращения (рис. 5).
1.3. Плоскопараллельное движение
твердого тела
> Плоскопараллельным называется такое движение твердого те-
тела, при котором остается постоянным расстояние от любой его точки
до некоторой неподвижной плоскости, которая называется основной.
Изучение плоскопараллельного движения сводится к исследова-
исследованию движения плоской фигуры в ее плоскости. Вращение твердого
тела вокруг неподвижной оси является частным случаем плоскопа-
плоскопараллельного движения. ОУгол поворота плоской фигуры (p(t) отсчи-
тывается от некоторой неподвижной прямой до прямой, неизменно
связанной с фигурой. Правило знаков для <р принимается такое же,
как в случае вращения тела вокруг неподвижной оси.
Положение плоской фигуры полностью определено, если известны
координаты некоторой ее точки (полюса, центра) Р и угол поворота.
Соотношения
xP = x(t)t yP = y(t), <p = <p(t),
задающие три функциональные зависимости от времени, называются
уравнениями движения плоской фигуры. Угловая скорость и и угло-
угловое ускорение е вводятся аналогично случаю вращения тела вокруг
неподвижной оси: и — ф, е = и = ф.
1.3. Плоскопараллельное движение твердого тела
309
р> Теорема о скоростях точек плоской фигуры: скорость лю-
любой точки В плоской фигуры равна геометрической сумме векторов
скорости полюса vp и скорости vBP,
которую имела бы точка В при враще-
вращении фигуры вокруг неподвижного по-
полюса Р (рис. 6):
vB = vP+vBp.
Скорость vBP перпендикулярна от-
отрезку ВР, ее величина подсчитывает-
ся по формуле vBP = \lj\BP, а напра- Рис. 6.
вление согласовано с направлением дуговой стрелки и.
Точка Pv плоской фигуры, скорость которой в рассматриваемый
момент времени равна нулю, называется мгновенным центром ско-
скоростей. Если эту точку принять в качестве полюса, скорость произ-
произвольной точки В плоской фигуры определится по формуле vB — vBPv.
Направление vB будет согласовано с направлением дуговой стрелки
угловой скорости, а ее модуль найдется из формулы vB = \w\BPv.
Скорости точек плоской фигуры в рассматриваемый момент време-
времени будут распределены так же, как в случае вращения фигуры во-
вокруг неподвижной оси, проходящей через мгновенный центр скоро-
скоростей. Поэтому можно воспользоваться формулой (9) вращательного
движения
VC _ VD
1 ' В P.,
CPV DPV
На рис. 7 показаны варианты расположения мгновенного центра
скоростей:
а) при качении без проскальзывания по неподвижной поверх-
поверхности мгновенный центр скоростей находится в точке касания
(рис. 7, а);
б) если vB || vc и vB J_ ВС, то положение Pv определяется
построением, показанным на рис. 7, б]
в) если vB || vc и отрезок ВС не перпендикулярен vB) то мгно-
мгновенного центра скоростей нет, и — 0, а скорости всех точек тела
одинаковы в данный момент времени (рис. 7, в).
310
Кинематика
Пример. Найти в момент времени t = 1 с скорости точек А, В и С линейки
эллипсографа, движение которого описано в примере из разд. 1.1.
Решение. Стержень АВ совершает плоскопараллельное движение. Проводя
перпендикуляры к направлениям скоростей точек А
и J3, найдем положение мгновенного центра скоро-
скоростей Pv (рис. 8). Угловую скорость и> = ф = 1с~1 изо-
изобразим дуговой стрелкой с учетом знака. Направим
скорости точек А, В и С перпендикулярно прямым,
соединяющим их с Р„, согласовав их направления с
дуговой стрелкой угловой скорости. Величины ско-
скоростей найдем из соотношения
¦ АР.
ВР„
Рис. 8.
откуда vA = vc = 1,0 м/с, vB = у/3 = 1,73 м/с.
> Теорема об ускорениях точек плоской фигуры: ускорение
любой точки В плоской фигуры равно геометрической сумме векто-
векторов ускорения полюса ар и ускорения авр, которое имела бы точка В
при вращении фигуры вокруг неподвижного полюса Р:
пг> = пт
2ВР
-ар-\- SL
ВР
A0)
Модули векторов авр и авр и их ориентация на плоскости следу-
следующие: аВР || ВР и направлен к полюсу Р; аВР — uj2BP\ aBP J_ ВР и со-
согласован с направлением дуговой стрел-
стрелки е, атВР - \e\BP (рис. 9).
Если спроектировать векторное ра-
равенство A0) на два направления — па-
параллельное ВР и перпендикулярное ВР,
получится система двух скалярных урав-
уравнений
aBcosS = —aPcos/3 + uj2BP,
ав sin S = —аР sin /3 + \e\BP,
Рис. 9.
в которых фигурируют семь величин —
ав, ар, 8, /?, ВР, и, е. Если пять из них
известны, то оставшиеся две могут быть найдены путем решения
системы.
Мгновенным центром ускорений плоской фигуры называется не-
неизменно связанная с ней точка Pai ускорение которой в рассматрива-
рассматриваемый момент времени равно нулю. Картина распределения ускорений
точек плоской фигуры такая же, как при ее вращении вокруг непо-
неподвижной оси, проходящей через точку Ра.
1.5. Сложное движение точки 311
1.4. Произвольное движение твердого тела
Скорость vB и ускорение ав любой точки твердого тела, совер-
совершающего произвольное движение, могут быть найдены, если в рас-
рассматриваемый момент времени известны: скорость vp и ускорение аР
некоторой точки Р тела, а также векторы угловой скорости сЗ и угло-
углового ускорения ?*тела. Соответствующие формулы имеют вид
{Гд — vp + й х РВ.
-^ -^ (И)
ав - ар+ех РВ + й х (й х РВ).
Векторы Q и е характеризуют кинематическое состояние тела
в рассматриваемый момент времени. Можно показать, что они не
зависят от выбора полюса Р.
В случаях вращения тела вокруг неподвижной оси и при плоско-
плоскопараллельном движении вектор й равен первой производной от угла
поворота по времени и направлен перпендикулярно основной плоско-
плоскости. При этом, если посмотреть навстречу вектору сЗ, вращение бу-
будет казаться происходящим против хода часовой стрелки. Вектор ?
в этих случаях направлен параллельно вектору сЗ, если знаки фиф
одинаковы. В противном случае и и ?*антипараллельны.
При произвольном движении малое перемещение тела удобно
представить как совокупность его простейших движений, совершае-
совершаемых одновременно, — малого поступательного перемещения вместе с
полюсом Р и малого поворота вокруг оси, проходящей через полюс.
Если vp = 0, что имеет место, например, при сферическом дви-
движении, формула для скорости A1) принимает вид формулы Эйлера
vB=ux РЙ.
В этом случае распределение скоростей точек тела такое же, как
при вращении вокруг неподвижной оси, проходящей через Р парал-
параллельно вектору сЗ, поэтому она называется мгновенной осью враще-
вращения. Скорости всех точек тела, оказавшихся на этой оси в рассма-
рассматриваемый момент времени, будут равны нулю, и малое перемещение
тела можно рассматривать как поворот на малый угол вокруг мгно-
мгновенной оси вращения.
1-5. Сложное движение точки
> Основные понятия. Часто за одной и той же точкой М следят
Два наблюдателя, один из них находится в основной системе коорди-
координат Oxyz, которая считается неподвижной, другой — в подвижной
системе координат Px1y1z1, которая известным образом движется
относительно неподвижной (рис. 10). В этом случае, если будет задан
Закон движения точки в подвижной системе координат, то тем самым
312 Кинематика
в любой момент времени будет задано поло-
положение точки и в неподвижной системе ко-
координат. Движение точки, заданное таким
образом, называется сложным (составным)
движением точки.
Описанный способ задания движения
точки отличен от изученных ранее. Ско-
Скорость точки и ее ускорение можно опреде-
Рис! 10. лить так: надлежащими преобразованиями
перейти к одному из изученных способов задания движения точки
и затем действовать соответствующим образом. Однако эту же за-
задачу можно решить по-другому, опираясь на рассматриваемые ниже
теоремы о скоростях и ускорениях при сложном движении точки.
Абсолютным движением точки М называется ее движение по
отношению к неподвижной (абсолютной) системе координат. Траек-
Траектория точки, ее скорость и ускорение называются соответственно
абсолютной траекторией, абсолютной скоростью ?абс и абсолют-
абсолютным ускорением аабс.
Относительным движением точки М называется ее движение
по отношению к подвижной системе координат. Траектория точки,
ее скорость и ускорение по отношению к подвижной системе коорди-
координат называются соответственно относительной траекторией, от-
относительной скоростью гГотн и относительным ускорением аотн.
Переносным движением называется движение подвижной систе-
системы координат по отношению к неподвижной. При этом движении по-
подвижная система «переносит» вместе с собой множество неизменно
связанных с ней точек.
Переносной скоростью vnep и переносным ускорением а назы-
в.аются скорость и ускорение той неизменно связанной с подвижной
системой точки В, с которой в данный момент времени совпадает
движущаяся точка М.
Если известны скорость vp и ускорение аР некоторой точки,
принадлежащей подвижной системе, а также угловая скорость и и
угловое ускорение епер подвижной системы, то vB и ав можно найти,
пользуясь формулами A1):
vB = vP + cJnep х f,
aB = aP + епер х ?+ йпер х (йпер х г).
> Основные теоремы. Теорема о скоростях при сложном движе-
движении точки: вектор абсолютной скорости равен геометрической сум-
сумме векторов относительной и переносной скоростей
1.5. Сложное движение точки
313
Теорема об ускорениях при сложном движении точки: вектор аб-
абсолютного ускорения равен геометрической сумме векторов относи-
относительного, переносного и кориолисова ускорений
аа^ =
Вектор ускорения Кориолиса определяется формулой
лкор
= 2(й
х vO
)
A2)
и находится в соответствии с правилами вычисления векторного
произведения.
При нахождении векторов аотн и апер необходимо иметь в виду,
что каждый из них может являться геометрической суммой несколь-
нескольких составляющих, например касательного и нормального ускорений.
Пример. По линейке эллипсографа, движение которого описано в примере
из разд. 1.1, движется точка М по закону AM = 0,5 t2 — 2t + 2,5. Определить ее
скорость и ускорение в момент времени t = 1 с.
Решение. Найдем скорость и ускорение, пользуясь теоремами сложного дви-
движения точки. Введем подвижную систему координат, связав ее со стержнем АВ.
При таком выборе относительное движение точки М будет задано естественным
способом. При t = 1 с она окажется в середине отрезка.
Относительные скорость и ускорение найдем, пользуясь формулами F)
= 1= 1м/с2,
= t;2TH/pOTH = 0, (так как 1/ротн = 0),
где использовано обозначение L = AM.
Изобразим на рис. 11 относительные скорость и ускорение с учетом знаков.
Переносными скоростью и ускорением точки М будут являться скорость
и ускорение того пункта линейки эллипсографа, в котором точка окажется
в момент t = 1 с. Этим пунктом будет являться точка С линейки, скорость
и ускорение которой были найдены при решении
примера, разобранного в разд. 1.1 (см. формулы (8)):
^пер=^С ^пер = аС-
Найдем ускорение Кориолиса A2). Вектор угло-
угловой скорости подвижной системы координат напра-
направлен к наблюдателю перпендикулярно плоскости ри-
рисунка. Вектор акор располагается в плоскости рисун-
рисунка перпендикулярно vOTH так, что если посмотреть
навстречу акор, поворот от ш в ближайшую сторону
к ^отн кажется происходящим против хода часовой
стрелки (рис. 11). Модуль акор равен
Kopl = 2HKTH|sin90° = 2 м/с2.
Находим абсолютную скорость точки М
v =v +v РИС# 11#
Спроектируем обе части векторного равенства на оси х и у
va6cx = ^отнх + ^перх = -1 sin 30° + 1 COS 30° =0,37м/с,
v&6cy = 4>тн у + vneP y = 1 cos 30° - 1 sin 30° = 0,37 м/с,
314 Основные понятия и аксиомы механики
откуда va6c = \Лабс х + У1бс у - °>52 м/с-
Находим абсолютное ускорение точки М
^абс = ^отн + ^пер + ^кор'
Спроектируем обе части последнего векторного соотношения на оси х и у с
учетом формул (8)
аабсх = lsin30° - 1,37- 2cos30° = -2,60м/с2,
аабсУ = -Icos30° -0,37-2sin30° = -2,24м/с2.
Поэтому аабс = ^абс х + а2бс у = 3,43 м/с2.
При решении задач кинематики с помощью теорем сложного
движения точки нахождение кинематических характеристик относи-
относительного и переносного движений можно начинать только после вы-
выбора подвижной системы координат. Поэтому вопрос о направлении
ускорения Кориолиса лишен всякого смысла, пока не указаны непо-
неподвижная система, а также подвижная система и закон ее движения.
2. Основные понятия и аксиомы
механики
2.1. Основные понятия механики
> Механические системы. Силы. Механической системой назы-
называется совокупность материальных точек, выделенных по некоторо-
некоторому признаку. Как правило, положение какой-либо точки, ее скорость
и ускорение зависят от положений и скоростей остальных точек.
Несвободной механической системой называется такая система
точек, на положения и скорости которых наложены ограничения. Ма-
Материальные тела, которые осуществляют эти ограничения, называ-
называются механическими связями, наложенными на механическую систе-
систему. Соотношения, связывающие координаты, скорости точек систе-
системы и время, называются уравнениями связей. Материальная система
называется свободной в случае отсутствия механических связей.
Абсолютно твердым телом (твердым телом, телом) называется
совокупность материальных точек, взаимное положение которых не
меняется.
При взаимодействии точек (тел) механической системы происхо-
происходит изменение их кинематического состояния. Мерой такого взаи-
взаимодействия является сила, изображаемая на рисунках в виде напра-
направленного прямолинейного отрезка. Линией действия силы называет-
называется прямая, вдоль которой направлен этот отрезок.
Совокупность сил, выделенных по какому-либо признаку, называ-
называется системой сил и обозначается {.г ,•}.
2.1. Основные понятия механики
315
Система сил называется уравновешенной, если, приложенная к
свободному твердому телу, находящемуся в покое, она не выводит
его из этого состояния.
Системы сил {?¦} и {Gj} называются эквивалентными, если,
порознь приложенные к свободному твердому телу, они вызывают
одинаковое изменение его кинематического состояния.
Равнодействующей системы сил, приложенных к твердому телу,
называется сила, эквивалентная исходной системе сил.
Силы, с которыми механические связи действуют на точки систе-
системы, называются силами реакций связей. Силы, действующие наточки
системы и не являющиеся силами реакций, называются активными
силами.
^ Моменты сил. Моментом силы F относительно центра (точ-
(точки) Р называется вектор MP(F), равный векторному произведению
радиуса-вектора fp, проведенного из центра в точку приложения си-
силы, на вектор силы: MP(F) = fp x F (рис. 12).
Модуль момента силы равен произведению модуля силы на ве-
величину ее плеча относительно центра. Плечом силы F относитель-
относительно центра называется отрезок перпен-
перпендикуляра РА", опущенного из центра на
линию действия. Вектор MP(F) пер-
перпендикулярен плоскости, в которой рас-
располагаются сила и центр, и направлен
так, что если посмотреть ему навстре-
навстречу, поворот силы вокруг центра кажет-
кажется происходящим против хода часовой
стрелки. Если силу перенести по линии
действия, ее момент относительно того
же центра не изменится.
Моментом силы F относительно
оси z называется скалярная величина MZ(F), равная проекции на
эту ось вектора момента силы относительно любого центра, лежа-
лежащего на этой оси/Для вычисления момента силы относительно оси
необходимо:
1) провести любую плоскость тг, перпендикулярную оси, и отме-
отметить точку Р1 их пересечения (рис. 12);
2) найти F' — проекцию силы на плоскость;
3) найти абсолютное значение момента вектора F1 относительно
Центра Р'\
4) полученной величине присвоить знак, наблюдая за вращением
F1 вокруг Р' со стороны положительного направления оси, при
этом вращению против хода часовой стрелки будет соответствовать
положительный знак.
Рис. 12.
316 Основные понятия и аксиомы механики
Момент силы относительно оси не изменится, если силу перенести
вдоль линии действия. Момент силы относительно оси равен нулю,
если сила и ось находятся в одной плоскости; в этом случае линия
действия силы либо параллельна оси, либо ее пересекает.
Момент силы Р относительно начала системы координат О и
моменты силы относительно координатных осей вычисляются по
формулам
г j к
х у z
F F F
1 х 1 у L z
М(Р\ — 7F — tF M (Р\ — tF — 11F
y\r ) — zrx xfzi mz\r ) — хгу Угх>
где Fx, F , Fz — проекции силы на координатные оси, а ж, у, z -
координаты точки ее приложения.
Главным вектором системы сил {Fk} называется вектор /
равный геометрической сумме всех сил системы:
Главным моментом системы сил относительно центра Р назы-
называется вектор Мр, равный геометрической сумме векторов моментов
всех сил системы относительно центра Р:
/c = l k = \
> Парой сил называется система двух сил F' и ?7/, приложен-
приложенных к одному твердому телу, которые равны по модулю, параллель-
параллельны и направлены в противоположные
стороны (рис. 13).
Кратчайшее расстояние h между
у линиями действия сил пары называет-
~~ ся плечом пары, а плоскость, в кото-
Рис. 13 Р°й лежат силы, — плоскостью дей-
действия пары.
Свойства пары сил:
1. Главный вектор пары сил равен нулю.
2. Главный момент пары сил M(F', F") = М не зависит от
выбора центра и называется моментом пары сил. Он равен моменту
одной из сил пары относительно точки приложения другой силы.
Момент пары сил является мерой ее механического действия на
твердое тело. Под действием пары сил свободное твердое тело,
находившееся до того в покое, начинает вращаться вокруг оси,
параллельной вектору момента пары сил.
2.2. Аксиомы механики 317
2.2. Аксиомы механики
Основные аксиомы механики (законы Галилея — Ньютона) пере-
перечислены ниже.
^ 1. Закон инерции (первый закон Ньютона): если на свободную
материальную точку не действуют силы, то она сохраняет состояние
покоя или равномерного прямолинейного движения.
р> 2. Закон пропорциональности силы и ускорения (второй
закон Ньютона) записывается в виде векторного равенства
та — F,
согласно которому сила, действующая на свободную точку, сообщает
ей ускорение, вектор которого параллелен силе и пропорционален ее
величине.
Масса точки т входит во второй закон скалярным коэффици-
коэффициентом пропорциональности. В механике масса полагается постоян-
постоянной величиной, она является мерой инертности и гравитационных
свойств материальной тцчки.
Системы отсчета, в которых выполняются первый и второй
законы Ньютона, называются инерциальными системами отсчета.
Если в некоторой системе отсчета эти законы не выполняются, то
она называется неинерциальной.
> 3. Закон равенства действия и противодействия (третий
закон Ньютона): всякому действию соответствует равное и проти-
противоположно направленное противодействие.
Силовые воздействия одних материальных тел на другие не быва-
бывают односторонними, они всегда взаимны. Силы не возникают сами
по себе, а являются результатом контактного или пространственно-
пространственного взаимодействия тел. Появление силы, действующей на тело, пред-
предполагает наличие другого тела, на которое, в свою очередь, будет
действовать сила со стороны первого тела. Закон утверждает, что
эти силы равны по величине, противоположны по направлению и их
линии действия совпадают.
> 4. Система сил, приложенных к одной точке, имеет равнодейству-
равнодействующую R*, которая равна их геометрической сумме.
Теорема Варинъона о моменте равнодействующей системы схо-
сходящихся сил (является следствием четвертой аксиомы): момент рав-
равнодействующей системы сходящихся сил относительно произвольно-
произвольного центра равен геометрической сумме моментов сил системы отно-
относительно того же центра.
> 5. Кинематическое состояние несвободной механической систе-
системы не изменяется, если отбросить механические связи, наложенные
на систему, заменив их действие силами реакций связей.
318 Статика
3. Статика
3.1. Основные законы и теоремы статики
> Задачами статики являются:
1) преобразования систем сил в эквивалентные системы сил;
2) определение условий равновесия систем сил, действующих на
твердое тело.
> Аксиомы статики. Дополнительно к общим законам механики
в статике присоединяют следующие аксиомы.
1. Аксиома об уравновешенности двух сил, приложенных к твер-
твердому телу: две силы, приложенные к твердому телу, взаимно урав-
уравновешиваются только в том случае, если силы направлены в разные
стороны вдоль общей линии действия и модули их равны.
2. Аксиома присоединения и исключения уравновешенных систем
сил: действие системы сил на твердое тело не изменится, если к ней
добавить или из нее исключить уравновешенную систему сил.
Из последних двух аксиом следует, что силу, приложенную к
твердому телу, можно переносить вдоль линии действия, при этом
действие силы на тело не будет меняться.
3. Аксиома о сохранении равновесия механической системы при
наложении дополнительных механических связей: если механическая
система находится в состоянии равновесия, то оно сохранится, если
на систему наложить дополнительную механическую связь. Отсюда,
в частности, следует, что равновесие деформируемого тела, находя-
находящегося под действием некоторой системы сил, сохранится при его
затвердевании, так как затвердевание тела эквивалентно наложению
дополнительных механических связей на систему материальных то-
точек, образующих деформируемое тело.
> Основные теоремы статики.
Можно доказать, что две пары сил эквивалентны в том случае,
если их моменты равны. Это означает, что, не изменяя действия па-
пары на твердое тело, ее можно переносить в любое место в плоскости
ее действия, при этом пару можно поворачивать, менять величины
сил и плеча, оставляя постоянным направление вращения и величину
момента пары. Пару можно также переносить в другую плоскость,
параллельную исходной плоскости действия пары. Таким образом,
основной характеристикой пары является вектор ее момента, поэто-
поэтому пару удобнее представлять этим вектором, а не двумя антипарал-
антипараллельными силами.
Теорема о результирующей паре сил: система пар, приложенных
к твердому телу, эквивалентна одной паре сил, момент которой равен
геометрической сумме моментов исходных пар.
3.2. Условия уравновешенности систем сил, приложенных к телу 319
Теорема о параллельном переносе силы: силу, не меняя ее дей-
действия на твердое тело, можно параллельно перенести в любую точку
тела, добавив к нему при этом пару сил (эта пара называется присо-
присоединенной), момент которой равен моменту переносимой силы отно-
относительно той точки, куда сила переносится.
Теорема о приведении системы сил к центру: произвольная си-
система сил, приложенных к твердому телу, эквивалентна одной силе,
приложенной в наперед выбранном центре Р, и одной паре сил. При
этом сила равна главному вектору системы сил Д, а момент пары
сил — главному моменту системы сил МР относительно выбранного
центра.
Теорема об эквивалентности систем сил, приложенных к твер-
твердому телу: для того чтобы системы сил были эквивалентны, необхо-
необходимо и достаточно, чтобы у них были одинаковые главные векторы
и главные моменты относительно одного и того же центра.
Теорема Вариньона о моменте равнодействующей: если система
сил имеет равнодействующую R *, то ее момент относительно любого
центра Р равен геометрической сумме векторов моментов всех сил
системы относительно того же центра:
/с=1
Следствие: момент равнодействующей относительно произволь-
произвольной оси равен алгебраической сумме моментов всех сил системы от-
относительно той же оси.
3.2. Условия уравновешенности систем сил,
приложенных к твердому телу
> Уравнения равновесия твердого тела. Для того чтобы си-
система сил, приложенных к твердому телу, была уравновешенной, не-
необходимо и достаточно, чтобы были равны нулю ее главный вектор
и главный момент относительно какого-либо центра
(Рк) = 0. A)
Условия уравновешенности системы сил, приложенных к твердо-
твердому телу, в координатной форме получаются из векторных уравне-
уравнений A) и имеют вид системы шести уравнений
= о, "?м(Р) ?м(?) о
320 Статика
Верхние три уравнения называются уравнениями проекций сил на
координатные оси; они отражают тот факт,лто при'равновесии твер-
твердого тела алгебраическая сумма проекций всех сил, приложенных к
телу, на каждую координатную ось должна быть равна нулю. Нижние
три уравнения называются уравнениями моментов сил относительно
координатных осей. Эти уравнения указывают на то, что при рав-
равновесии тела алгебраическая сумма моментов всех сил, действующих
на тело, относительно каждой координатной оси должна быть равна
нулю.
Система уравнений B) называется основной системой уравнений
равновесия твердого тела, находящегося под действием произволь-
произвольной системы сил. Существуют другие формы системы уравнений рав-
равновесия, каждая из которых состоит из шести уравнений. При исполь-
использовании таких систем приходится следить за выполнением условий,
накладывающих ограничения на выбор осей, относительно которых
вычисляются суммы моментов сил.
В каждой задаче о равновесии твердого тела или конструкции,
состоящей из нескольких тел, кроме заданных величин, имеются ве-
величины, которые необходимо найти в процессе решения. Задача о
равновесии называется статически определимой, если она решается
до конца методами статики. В этом случае необходимо, чтобы чи-
число неизвестных не превышало числа уравнений равновесия. Задача
называется статически неопределимой, если ее нельзя решить, поль-
пользуясь только уравнениями статики. Поэтому задача о равновесии од-
одного тела, содержащая семь и более неизвестных, заведомо является
статически неопределимой.
> Частные случаи уравнений равновесия твердого тела. В
частных случаях расположения сил одно или несколько уравнений си-
системы B) могут обращаться в тождества. Например, если все силы
перпендикулярны координатной оси z, в тождество обращается урав-
уравнение проекций на ось z, и число уравнений равновесия уменьшается
в этом случае до пяти; если линии действия всех сил пересекают ось у,
в тождество обращается уравнение моментов относительно оси у.
Ниже рассмотрены системы сил, равновесие которых описывается
тремя уравнениями равновесия.
Система сил называется сходящейся, если линии действия сил
пересекаются в одной точке. Выберем начало координат в этой точке.
Уравнения моментов основной системы B) обращаются в тождества,
а оставшиеся три
EF*, = o, EF*v = °- XX = °
образуют систему уравнений равновесия.
3.3. Решение задач статики 321
Система сил называется плоской, если силы располагаются в
одной плоскости. Направим координатные оси так, чтобы все силы
оказались в плоскости хОу\ в этом случае третье, четвертое и
пятое уравнения основной системы B) обращаются в тождества,
оставшиеся три
XX = °- XX = о,
образуют систему уравнений равновесия плоской системы сил. Здесь
уравнение моментов относительно оси z записано в иной, эквива-
эквивалентной форме: в данном случае векторы моментов перпендикуляр-
перпендикулярны плоскости действия сил, если центр расположен в той же плоско-
плоскости. Поэтому можно рассматривать момент силы относительно цен-
центра как скалярную величину. В правой системе координат момент
считается положительным, если сила стремится повернуться вокруг
центра против хода часовой стрелки.
В случае плоской системы сил можно пользоваться другими фор-
формами уравнений равновесия. Одна из них:
XX = о, Емр(^) = 0- SMs(^) = °>
где Р и S — любые точки плоскости, для которых отрезок PS
неперпендикулярен оси х.
Еще одна форма уравнений равновесия:
где Р, 5, Е — любые точки плоскости, не лежащие на одной прямой.
Совокупность сил называется системой параллельных сил, если
линии действия сил параллельны. Ось z направим параллельно лини-
линиям действия. Первое, второе и шестое уравнения системы B) обра-
обращаются в тождества, оставшиеся
XX = о, Х>*(^*) = 0' ХХ(^*) = °
образуют систему уравнений равновесия тела, находящегося под
действием параллельных сил.
3.3. Решение задач статики
> Общая схема решения задач о равновесии тела (или кон-
конструкции, состоящей из нескольких тел) содержит несколько этапов.
Необходимо;
1. Выбрать тело (или конструкцию), исследование равновесия ко-
которого позволит определить требуемые величины. Нарисовать рас-
расчетную схему — упрощенный рисунок, на который вынесены лишь
А^ А. Д. Полянин, В, Д. Полянин и др.
322 Статика
необходимые для решения линейные размеры и углы, а несуществен-
несущественные детали опущены.
2. Изобразить на схеме активные силы, заданные в условии
задачи.
3. Если тело несвободно, отбросить наложенные на него механи-
механические связи, заменив их действие реакциями связей. После такой
замены тело становится свободным.
4. Проверить выполнение необходимого условия статической
определимости задачи: число неизвестных, появившихся на расчет-
расчетной схеме, не должно превышать числа уравнений равновесия для
рассматриваемой системы сил.
5. В случае выполнения этого условия составить систему уравне-
уравнений равновесия, решить ее и исследовать полученные результаты.
При решении задачи желательно действовать строго по описанной
схеме.
Опыт показывает, что наиболее часто ошибки допускаются
при замене связей их реакциями. Остановимся подробнее на этом
вопросе.
> Правила расстановки сил реакций механических связей.
Каждая механическая связь представляет либо тело, либо механиче-
механическое устройство, которое накладывает какие-либо ограничения на
перемещение тела в пространстве. При этом, в зависимости от вида
связи, некоторые перемещения запрещены, а некоторые — разреше-
разрешены. Это обстоятельство позволяет заранее, не находя численных зна-
значений силовых факторов действия связи, указать на некоторые каче-
качественные особенности. Правило, которому необходимо следовать при
замене связей силаАми реакций, заключается в следующем: реакция
связи в общем случае может состоять из двух силовых факторов —
силы, приложенной в точке наложения связи, и пары сил.
Если связь запрещает поступательное перемещение тела, появля-
появляется сила реакции, направление которой противоположно запрещен-
запрещенному перемещению. Если связь запрещает поворот тела, то возникает
пара сил реакции связи, которая обеспечивает это запрещение, при
этом вектор момента пары будет направлен вдоль оси запрещенного
поворота.
> Некоторые типы механических связей.
1. Идеально гибкая нерастяжимая невесомая нить. На рис. 14
изображена нить, прикрепленная к твердому телу в точке В, Рас-
Рассматриваемая связь наложена в точке 5, в силу идеальной гибкости
нити разрешен поворот тела вокруг любой оси, проходящей через эту
точку. Это означает, что пары сил реакции не возникает.
Для этого типа связи разрешены малые поступательные переме-
перемещения тела, при которых точка В движется по поверхности сферы
3.3. Решение задач статики
323
У/Ш/ШР/л
Рис. 14
Рис. 15
^
радиуса В К с центром в точке К) поэтому в направлении разрешен-
разрешенных перемещений сила реакции возникнуть не может. Запрещено по-
поступательное перемещение тела в направлении КВ} так как нить не-
нерастяжима. Это означает, что появляется сила реакции NВ) прило-
приложенная к телу в точке В, направленная по прямой ВК.
2. Аналогично направляются силы реакции, когда связь осуще-
осуществляется посредством либо свобод-
свободного опирания двух тел, поверхность
одного из которых является абсо- РГ~ ^НЗЙ7
лютно гладкой (рис. 15), либо по- '/W' ' iffl
движного шарнира (рис. 16). Рис. 16.
3. Жесткая заделка. Связь запрещает любое поступательное пе-
перемещение тела, поэтому возникает сила реакции связи RB) на-
направление которой неизвестно. Ее обычно
представляют тремя составляющими, па-
параллельными координатным осям. Жест-
Жесткая заделка запрещает поворот вокруг лю-
любой оси, проходящей через точку В) по-
поэтому возникает пара сил реакции, мо-
момент которой Мв неизвестен ни по ве-
величине, ни по направлению. Обычно неиз-
неизвестную пару заменяют эквивалентной си-
системой трех пар, моменты которых напра-
направлены вдоль осей координат (рис. 17).
Если на тело наложено несколько связей, то каждая из них иссле-
Дуется независимо от остальных связей и приложенных к телу сил.
Неизвестными в задачах статики могут быть не только реакции
связей, но и углы, линейные размеры конструкций и др. параметры.
Yg
Рис. 17.
324 Статика
M
Рис. 18. Рис. 19.
Пример 1. Найти реакцию жесткой заделки В изогнутой невесомой бал-
балки BDE (рис. 18), находящейся под действием силы F = 20 кН и пары сил с
моментом М = 2 кНм при следующих данных: а = 30°, BD = 2 м, DE = 1 м.
Решение. Будем следовать общей схеме решения задач о равновесии тела.
1. Реакция жесткой заделки В может быть найдена из исследования равно-
равновесия балки, поэтому в качестве твердого тела выбираем балку BDE. Отдельно
рисуем расчетную схему (рис. 19).
2. Расставляем на схеме активные силовые факторы, действующие на бал-
балку, — силу F и пару сил М, которую изображаем при помощи дуговой стрел-
стрелки в направлении вращения пары (в рассматриваемом случае по ходу часовой
стрелки).
3. Балка несвободна, так как на нее наложена связь — жесткая заделка
в точке В. Делаем балку свободной: отбрасываем связь, заменяя ее реакцией
связи. Реакция заделки состоит из силы Я в, неизвестной ни по величине, ни
по направлению, и пары сил с моментом Мв, неизвестным ни по величине, ни по
направлению вращения.
Вводим систему координат ху, как показано на рисунке. Поскольку напра-
направление силы Я в неизвестно, представим ее двумя составляющими: X в и У в.
Неизвестную пару сил реакции Мв изобразим дуговой стрелкой. Отметим, что
не нужно гадать, куда на самом деле направлены составляющие и дуговая стрел-
стрелка момента пары— все это выяснится после решения задачи. Например, на рас-
расчетной схеме X в была нами направлена влево лишь потому, что при этом она
оказалась заметнее на рисунке.
Заменим F эквивалентной системой сил, состоящей из двух составляю-
составляющих F ' и F ", направленных параллельно координатным осям
1*=!*'+^", F' = Fcosa, F" = Fsina.
4. Теперь на расчетной схеме оказалась свободная балка, находящаяся под
действием сил, расположенных в одной плоскости. В этом случае система
уравнений равновесия состоит из трех уравнений. Количество неизвестных —
ХВ) Ув, Мв —равно трем. Это означает, что количество неизвестных и коли-
количество уравнений совпадают и необходимые условия статической определимости
задачи выполнены.
5. Воспользуемся основной формой уравнений равновесия для плоской систе-
системы сил C), выбрав в качестве моментной точки центр В.
Основная опасность при составлении уравнений равновесия — возможность
потери какой-либо силы, либо пары сил, поэтому рекомендуется выписать в
строке все силы и все пары сил, приложенные к телу, а уравнения равновесия
составлять под этой строкой.
Силы, пары сил JtB Y*B MB P1 I?" M
3.3. Решейие задач статики 325
Подставив исходные данные, найдем решение задачи
Хв = -17,1 кН, YB = 10 кН, Мв = 4,9 кНм.
Знаки ответов говорят о том, что направление составляющей X в проти-
противоположно указанному на расчетной схеме, а направления составляющей Y в и
дуговой стрелки Мв соответствуют изображенным.
На схеме (рис. 19) не рекомендуется зачеркивать и рисовать заново X в
с учетом знака ответа, так как при этом становятся*' невозможными проверка
правильности составления уравнений равновесия и интерпретация результатов.
Сила реакции заделки RB является геоме- jrj,
трической суммой ортогональных составляющих
X в и Y в, поэтому ее величина может быть най- . \ м
дена по формуле ' х
Пример 2. Конструкция, состоящая из двух
невесомых стержней BD и DE, 'изображена на
рис. 20. Стержни имеют одинаковую длину 4 м и
соединены между собой и с основанием при по-
помощи шарниров, причем BE = BD. Левый стер-
стержень BD в средней точке нагружен горизонталь- Рис. 20.
ной силой F = 20 кН, правый стержень DE нагружен парой сил М = 10 кНм.
Определить опорные реакции и давление в промежуточном шарнире D.
Решение. Рассмотрим равновесие каждого стержня в отдельности, для чего
расчленим конструкцию на две части— стержни BD и DE, расставим активные
силы и реакции связей.
Расчетная схема задачи после описан-
описанных действий представлена на рис. 21,
система координат — общая для обоих
стержней. Сила Я^, действующая на
стержень BD со стороны стержня ED,
представлена двумя составляющими X D
и Y ?>, сила К 'D действия стержня DB
на стержень ED — составляющими X'D
и Y ?>. Поскольку сила действия К D и си- Рис. 21.
ла противодействия R'D должны удовле-
удовлетворять аксиоме действия—противодействия, то и их составляющие будут свя-
связаны соотношениями: X D = — X 'D, Y D = — / ?>, т.е. составляющие равны и
противоположно направлены, и это уже учтено на схеме. При этом алгебраиче-
алгебраические значения составляющих будут связаны соотношениями
XD=X'D, YD = Y'D. D)
Количество неизвестных—Хв, YB, XD, YD, XfD, Yp, XBi YE —равно
восьми. Равновесие каждого стержня будет описываться тремя уравнениями
равновесия; вместе с двумя уравнениями D) они образуют систему 8 уравнений
с 8 неизвестными (необходимые условия статической определимости задачи
выполняются).
Ниже выписаны уравнения равновесия:
для стержня BD для стержня ED
= -Fasin60° - '
+ YD2a cos60° = 0,
326 Статика
Решив эту систему уравнений с учетом равенств D), в итоге получим:
Хв - -16,44 кН; YB = -11,16 кН; XD = X'D = -3,56 кН; YD = У/, = 11,16 кН;
ХЕ = -3,56 кН; YE = 11,16 кН.
3.4. Центр параллельных сил. Центр
тяжести твердого тела
> Центр параллельных сил. Пусть на точки твердого тела дей-
действует система параллельных сил {JF^}. Силы могут поворачиваться
вокруг точек их приложения, оставаясь параллельными. Можно дока-
доказать, что система имеет равнодействующую it*, если главный вектор
отличен от нуля. При этом линия действия Я * проходит всегда через
одну и ту же неизменно связанную с телом точку С независимо от
ориентации сил. Эта точка называется центром параллельных сил, и
ее положение в пространстве определяется радиусом-вектором гс\
с~
здесь гк ~-радиус-вектор точки приложения силы Fk) a Fk —алге-
—алгебраическое значение силы.
Координаты хС) уС) zc центра параллельных сил можно опреде-
определить по формулам
, _
> Центром тяжести твердого тела называют центр параллель-
параллельных сил, представляющих силы тяжести материальных частиц, из
которых состоит тело. Если тело находится на поверхности Земли и
его размеры малы по сравнению с радиусом Земли, то можно счи-
считать, что линии действия сил тяжести параллельны, а их величины
зависят лишь от объема материальных частиц, плотности материала
и ускорения свободного падения д) одинакового для всех частиц.
Формулы для нахождения центра тяжести следуют из формул для
нахождения центра параллельных сил
JjfdV JjxdV jiydV JyzdV
? V Xc= VJdv ' Ус= Vfdv ' Zc= V
где V — объем тела, 7 = j(x} у, z) — удельный вес; G = / 7 dV — вес
v
тела.
Аналогичные формулы имеют место для нахождения центра тя-
тяжести тела, имеющего форму поверхности или линии.
3,5. Распределенные силы 327
р> Способы нахождения центра тяжести.
Симметричные тела. Если тело имеет плоскость (ось, центр)
материальной симметрии, то его центр
тяжести находится в этой плоскости (на
оси, в центре).
Метод разбиения. Пусть тело соста-
составлено, например, из трех частей (рис. 22),
для каждой из которых известен вес
Gu G2, G3 и положение центра тяжести
fCl, гСз, гСз. Радиус-вектор центра тяже-
тяжести тела гс и его координаты находятся
по формулам Рис- 22>
f = ^c12c23cs = Gixcl+G2xc2+G3xc3
с G + G + G ' с G
_ GiyCl+G2yC2+G3yCa
Ус- G
Метод отрицательных масс. Пусть теперь необходимо найти
центр тяжести нового тела, составленного из частей 1 и 2 (его
можно получить, вырезав из основного тела часть 3). Решение можно
получить либо по формулам E), либо по формулам
-/ G?c - G3^c3 , Gxc "
G-G3
где G = Gl+G2+G3 — вес тела, составленного из трех частей, a G3 —
вес вырезанной части, который в формулы вхоДит с отрицательным
знаком, что и послужило основанием для названия метода.
3.5. Распределенные силы
В практике часто встречаются случаи, когда к телу приложены
не сосредоточенные силы, а нагрузки, распределенные по некоторому
объему, поверхности или линии. Частный случай объемного распре-
распределения силы веса был рассмотрен в разд. 3.4. Векторная величина q,
характеризующая нагрузку, называется интенсивностью нагрузки и
измеряется в Н/м3, Н/м2 или Н/м.
При решении задач статики распределенную нагрузку обычно
заменяют более простой статически эквивалентной силой (системой
сил).
1. Равномерно распределенная нагрузка интенсивности <jf (рис. 23)
в плоской задаче статики имеет равнодействующую Q = qBD, линия
328 Статика
к
Рис. 23. Рис. 24.
действия которой проходит через середину отрезка приложения на-
нагрузки BE = ED.
2. Линейно распределенная нагрузка в плоских задачах статики
(рис. 24) имеет равнодействующую Q = yfmax-^A проходящую
через точку Е) причем BE = -|-J
3.6. Законы трения (законы Кулона)
> Законы трения скольжения. Рассмотрим тело веса G, находя-
находящееся в покое на негладкой горизонтальной плоскости (рис. 25). По-
Попытка передвинуть тело, приложив к нему горизонтальную силу г,
не приводит к успеху до тех пор, пока величина силы не достигнет не-
^ которого значения F*. Равнодейству-
Равнодействующая сил реакций опоры может быть
представлена в виде двух составляю-
Щих — силы нормального давления Й
& и силы трения покоя FTp. Уравнение
рис# 25. проекций сил на горизонтальную ось
дает FTp = F.
Опыт показывает, что F* и N связаны соотношением (закон
Кулона)
F* = f0N,
где /0 называется статическим коэффициентом трения; он зависит
от материалов соприкасающихся тел и состояния их поверхностей.
Пока F ^ F*, тело будет оставаться в покое. Если же к нему
приложить силу, большую чем F*, то оно станет двигаться. При
движении силу сопротивления можно найти, пользуясь формулой
^Тр = fN, F)
где / называется динамическим коэффициентом трения, a FTp —
силой трения скольжения.
Отметим, что динамический коэффициент трения всегда меньше
статического коэффициента трения: / < /0.
4.1. Дифференциальные уравнения движения точки 329
р> Законы трения качения. Рассмотрим диск радиуса i?, поко-
покоящийся на негладкой горизонтальной плоскости (рис. 26). Попытка
перекатить диск, приложив к его центру горизонтальную силу F , не
приведет к успеху, пока величина силы остается меньше предельного
значения F**.
Силы реакции опоры, распределенные
по малой поверхности вблизи точки кон-
контакта Р, в соответствии с теоремой о
приведении системы сил к центру мо-
могут быть заменены эквивалентной систе-
системой — силой нормального давления N, си-
силой трения покоя г тр, приложенными в
т* точке контакта Р, а также парой сил тре-
Рис. 26. ния качения с моментом Мтр.
При равновесии диска из уравнения моментов относительно цен-
центра Р следует FR = Мтр. Опыт показывает, что F** и N связаны
соотношением F** = kN/R, при этом
М** = kN. G)
Размерный коэффициент к[см] называется коэффициентом тре-
трения качения.
Поверхность качения называют абсолютно шероховатой, когда
/ ф О и к = 0.
Опыт показывает, что при прочих равных условиях F* много
больше F**, поэтому в технике при необходимости уменьшить потери
на трение стремятся заменить скольжение качением.
4. Динамика материальной точки
4.1. Дифференциальные уравнения движения
материальной точки
Движение материальной точки по отношению к инерциальной
системе отсчета описывается вторым законом Ньютона:
/e = l
гДе m — масса точки, а — ее ускорение, в правой части равенства —
геометрическая сумма всех сил, приложенных к точке. Причины воз-
возникновения каждой из сил могут быть различными. Здесь мы будем
Различать силы активные Fj и силы реакций связей Нк. Активные
330
Динамика материальной точки
силы зависят от времени t) а также от положений и скоростей то-
точек механической системы. К активным силам относятся, например,
силы тяжести, упругости, вязкого трения, аэрогидродинамического
сопротивления и т.п.
Силы реакций связей действуют на несвободную материальную
точку, когда ее движение стеснено механическими связями. Эти силы
можно определить лишь в процессе решения задачи динамики.
Выберем декартовы оси инерциальной системы отсчета я, у) z и,
проектируя на них обе части векторного равенства A), получим
m-
~di2-
Эти три уравнения называются дифференциальными уравнениями
движения материальной точки в декартовых координатах.
Дифференциальные уравнения движения точки в проекциях на
естественные оси координат имеют вид
dv
dv v
Здесь учтено, что аТ = —, ап = —, аь = 0.
4.2. Первая и вторая задачи динамики
В уравнения движения (см. разд. 4.1) неизвестные могут входить
как в левые, так и в правые части. В зависимости от этого задачи
динамики делятся на два типа, которые рассмотрены ниже.
> Первая задача динамики. Задан закон движения и активные
силы, необходимо найти силы реакций связей.
Пример 1. Пэуз веса G, которому в мо-
мент времени tQ = 0 была сообщена некоторая
начальная скорость, поднимается по наклонной
шероховатой плоскости (рис. 27). Определить
величины сил трения FTp и нормального давле-
давления ЛГ, действующих на тело, если известны ко-
коэффициент трения о плоскость / и угол накло-
Рис. 27. на а.
4.2. Первая и вторая задачи динамики 331
Решение. Введем декартовы оси координат, совместив начало отсчета О
с положением груза при t = 0. Изобразим груз в произвольном положении и
действующие на него силы. Принимая груз за материальную точку, запишем для
него второй закон Ньютона
тс?= #+ #+ ^тр. B)
Проектируя обе части векторного равенства B) на ось у, имеем 0 = —Gcosa + N
(учтено, что ускорение груза параллельно оси х). Отсюда находим N = Gcosa.
Используя далее закон Кулона (уравнение C) в гл. 3), получим силу трения
N G
> Вторая задача динамики. Заданы активные силы, уравнения
механических связей, начальное положение точки и ее начальная
скорость, необходимо найти закон движения точки и реакции связей.
Вторую задачу динамики рекомендуется решать последовательно
в несколько этапов, перечисленных ниже.
1. Рисуют предполагаемую траекторию движения, на которой
изображают материальную точку.
2. Рисуют силы, приложенные к точке.
3. Записывают второй закон Ньютона в векторной форме.
4. Выбирают удобную систему координат.
5. Записывают уравнения движения точки в проекциях либо на
оси декартовой системы координат, либо на оси естественного трех-
трехгранника. В первом случае все активные силы необходимо выразить
через t) x) y) z) ?, у, i, а во втором — через t, s, s.
6. К полученным дифференциальным уравнениям добавляют на-
начальные условия: значения координат и проекций скорости точки в
начальный момент времени (они берутся из условия задачи с учетом
введенной системы координат).
7. Поставленную задачу решают численно или аналитически ме-
методами, известными из курса высшей математики.
Указанные этапы решения рекомендуется выполнять, не меняя
порядка их следования.
Пример 2. Дополнительно к условиям задачи примера 1 дано, что в момент
времени t^ скорость груза стала равна половине начальной. Найти начальную
скорость груза г»0 и путь D, пройденный им за время *„.
Решение. Проектируем обе части векторного равенства B) на ось х.
Используя формулы G = тд и FTp = G f cos а, получим
х = — д (sin а + / cos a).
Общее решение полученного дифференциального уравнения и выражение для
скорости груза даются формулами (подробности их. получения опущены, а их
правильность можно проверить путем дифференцирова!ия)
х = - \д (sin а + / cos a) t2 + C\ t + Сг,
х = - д (sin а + / cos a)t + Сх.
Последние два соотношения должны быть справедливы в любой момент вре-
времени ?, стало быть, и в начальный момент времени tQ = 0, и в момент времени ?#,
332 Общие теоремы динамики механической системы
т.е. соотношения будут удовлетворяться, если в них вместо t, x, dx/dt будут под-
подставлены сначала значения 0, 0, v0, а затем *„, D, vQ/2. После подстановок получим
систему четырех уравнений
0 = С2,
f
~у0 = - д (sin ос + / cos а)*„ + Сх
с четырьмя'неизвестными С1} С2, f0, D, решая которую, найдем искомые вели-
величины
v0 = 2g (sin а + / cos a)*,,
5. Общие теоремы динамики
механической системы
Довольно часто удается выделить важные особенности движения
механической системы, не прибегая к интегрированию системы диф-
дифференциальных уравнений движения. Это достигается применением
общих теорем динамики.
5.1. Основные понятия и определения
> Внешние и внутр^енние силы. Любая сила, действующая на
точку механической системы, обязательно является либо активной
силой, либо реакцией связи. Всю совокупность сил, действующих на
точки системы, можно разделить на два класса иначе: на внешние
силы Fe и внутренние силы F1 (индексы е и i — от латинских слов
externus — внешний и internus — внутренний). Внешними называются
силы, действующие на точки системы со стороны точек и тел, не вхо-
входящих в состав рассматриваемой системы. Внутренними называются
силы взаимодействия между точками и телами рассматриваемой си-
системы.
Это разделение зависит от того, какие материальные точки и тела
включены исследователем в рассматриваемую механическую систему.
Если расширить состав системы, включив в нее дополнительно точки
и тела, то некоторые силы, которые для прежней системы были
внешними, для расширенной системы могут стать внутренними.
> Свойства внутренних сил. Поскольку эти силы являются сила-
силами взаимодействия между частями системы, они входят в полную си-
систему внутренних сил «двойками», организованными в соответствии
с аксиомой действия-против'одействия. У каждой такой «двойки» сил
5.1. Основные понятия и определения 333
главный вектор и главный момент относительно произвольного цен-
центра равны нулю. Так как полная система внутренних сил состоит
только из «двоек», то
1) главный вектор системы внутренних сил равен нулю,
2) главный момент системы внутренних сил относительно произ-
произвольной точки равен нулю.
Массой системы т называется арифметическая сумма масс тк
всех точек и тел, образующих систему: *
*> Центром масс (центром инерции) механической системы назы-
называется геометрическая точка С, радиус-вектор и координаты кото-
которой хс, ус, zc определяются формулами
где rk) xki ук) zk —радиусы-векторы и координаты точек, образую-
образующих систему.
Для твердого тела, находящегося в однородном поле тяжести,
положения центра масс и центра тяжести совпадают, в других
случаях это разные геометрические точки.
Вместе с инерциальной системой отсчета часто рассматривают
одновременно неинерциальную систему отсчета, движущуюся посту-
поступательно. Ее оси координат Cx*y*z* (оси Кенига) выбирают так,
чтобы начало отсчета С постоянно совпадало с центром масс меха-
механической системы. В соответствии с определением центр масс непо-
неподвижен в осях Кёнига и находится в начале координат.
> Моментом инерции системы относительно оси z называется
скалярная величина Iz) равная сумме произведений масс тк всех
точек системы на квадраты их расстояний hk до оси:
Если механической системой является твердое тело, для нахожде-
нахождения 12 можно воспользоваться формулой
Iz=Jp(x2
i У) z) — плотность, а V — объем, занимаемый телом.
334 Общие теоремы динамики механической системы
Момент инерции однородного диска массы m радиуса R отно-
относительно оси, перпендикулярной его плоскости и проходящей через
центр, подсчитывается, по формуле
1г = \mR\ A)
Теорема Гюйгенса о моментах инерции относительно параллель-
параллельных осей, одна из которых проходит через центр масс:
где 12 и ICz — моменты инерции относительно параллельных осей
z и С2) причем ось Сг проходит через центр масс, d — расстояние
между осями, т — масса системы. Из теоремы следует, что ICz < Iz.
5.2. Теорема о движении центра масс
> Формулировка теоремы: центр масс механической системы
движется так же, как двигалась бы материальная точка с массой т,
равной массе системы под действием внешних сил, приложенных к
системе:
тас = V |*е, B)
где т — масса системы, а ас —ускорение центра масс.
Математическая запись теоремы B) похожа на второй закон
Ньютона. Дадим более подробное изложение теоремы. При движении
системы ее центр масс С движется по некоторой траектории. Пусть,
например, в момент времени tQ он находится в положении В и имеет
скорость vco. Если теперь в момент времени t0 в положение В
поместить точку массы т, сообщить ей скорость vco и приложить
к ней силы, равные внешним силам, действующим на систему, то,
начиная с этого момента, точка будет двигаться вместе с центром
масс системы, по одной и той же траектории, с одинаковой скоростью
и одинаковым ускорением.
Из уравнения B) можно получить дифференциальные уравнения
движения центра масс в проекциях на оси декартовой системы
координат:
тхс =
> Закон сохранения скорости центра масс механической
системы: если главный вектор внешних сил системы равен нулю,
центр масс системы движется с постоянной скоростью, т.е. если
Y^ F| = 0, то vc = const.
5.3. Теорема об изменении количества движения 335
Отметим, что в этом случае постоянным является вектор скоро-
скорости, а не только его модуль, поэтому центр масс будет двигаться
равномерно и прямолинейно.
Если проекция главного вектора внешних сил,системы на какую-
либо ось равна нулю, то проекция скорости центра масс системы
на эту ось остается постоянной. Например, если J2^kx = 0, то
vCx ¦= const.
Пример. По боковой грани призмы массы т1, находящейся на гладкой го-
горизонтальной плоскости, под действием силы веса скатывается однородный диск
массы т2 (рис. 28). Угол наклона боковой грани к основанию равен а. В началь-
начальный момент скорости призмы и диска равны нулю. Определить расстояние dX)
на которое сдвинется призма, когда центр диска переместится вдоль грани на
расстояние d2.
Решение. Включим в механическую систему два тела — призму и диск и
расставим внешние силы — активные силы веса Gl и и2 и силу реакции Nl
гладкой плоскости. Характерная особенность j- q
системы внешних сил заключается в том, что "^ 2
все они перпендикулярны горизонтальной оси,
и поэтому сумма их проекций на эту ось равна
нулю.
Направим ось х горизонтально слева на-
направо с началом в точке О. На рис. 28 изобра-
изобразим систему в двух положениях: начальном / и
в тот момент времени, когда диск переместил-
ся по грани призмы на расстояние d2 — //. По- .тис. 28.
скольку направление и величина перемещения призмы заранее неизвестны, то,
особенно не гадая, изобразим положение // правее начального положения /.
Так как ^ ^кх = ^» из закона сохранения проекции скорости центра масс
системы на ось х следует vCx = const. Так как в положении / все скорости были
равны нулю, то vCx = 0. Отсюда следует, что хс = const или Xq = хЦ. Пользуясь
формулами для координат центра масс, перепишем последнее равенство так:
7П\Хг* ~\гП'оХг'п ТП\Х(^ "Н m^Xf
1 Cl 2L?sl = ' Cl 2_?sl. C)
77lj -f" TYl2 771 j -f- 7Yl2
Здесь x*Ci и Xq — координаты центров масс призмы и диска в положении /, а
xCi и хЦ2 — аналогичные величины в положении //.
Из рис. 28 видно, что хЦх = xICi + dlt хЦ2 = Xq2 + dx + d2 cos а. Подставляя
эти соотношения в формулу C), после алгебраических преобразований найдем
^ _ m2d2 cos a
1 ml+m2 '
онак полученного ответа говорит о том, что перемещение призмы направлено
противоположно изображенному на рисунке.
5.3. Теорема об изменении количества
движения
> Количеством движения тонки массы т, движущейся со ско
Ростью {?, называется вектор
Q = mv.
336 Общие теоремы динамики механической системы
Количеством движения механической системы называется глав-
главный вектор количеств движения всех точек системы:
Можно доказать, что количество движения системы равно коли-
количеству движения воображаемой материальной точки, имеющей массу
системы и движущейся со скоростью центра масс: Q = mvc.
> Импульс силы. Пусть к движущейся материальной точке при-
приложена сила F (кроме нее к точке могут быть приложены и другие
силы, но сейчас мы выделили только одну из них). .
Элементарным импульсом силы F за элементарный промежуток
времени dt называется вектор d$ :
Импульсом силы F за.конечный промежуток времени от *0 до t
называется вектор S:
rt
Проекции импульса силы на координатные оси могут быть вычи-
вычислены по формулам
Sx = f Fx dt, Sy = f Fy dt, S2 = f Fz dt.
Jt0 Jt0 Jt0
> Разные формулировки теоремы о количестве движения.
Теорема об изменении количества движения в дифференциальной
форме: производная по времени от количества движения механиче-
механической системы равна главному вектору внешних сил системы:
или, по-другому: дифференциал количества движения системы равен
геометрической сумме элементарных импульсов всех внешних сил,
действующих на точки системы:
Проектируя на оси координат (например, на ось ж), получим
«ли
5.3. Теорема об изменении количества движения
337
Теорема об изменении количества движения в интегральной
форме: изменение количества движения механической системы за
некоторый промежуток времени равно сумме импульсов внешних сил
системы за тот же промежуток времени:
a S^ —
0 до t. В
При использовании теоремы применительно к одной материаль-
материальной точке следует иметь в виду, что любая сила, приложенная к точке,
является внешней.
^ Закон сохранения количества движения.
Закон сохранения количества движения механической системы:
где векторы Q и Qo соответствуют моментам времени t и tf0
импульсы внешних сил системы за промежуток времени от
проекциях на координатные оси (например, на ось х)
если
= 0, то Q = const.
Закон сохранения проекции количества движения на какую-либо
ось (например, на ось х):
если 2^ F?x = О, то Qx = const. " D)
Пример. По гладкой горизонтальной плоскости со скоростью г>0 движется
прямоугольный параллелепипед массы mj, на верхней грани которого покоят-
покоятся две самоходные тележки с массами т2 и т3 (рис. 29). В некоторый момент
времени тележки начинают двигаться навстречу друг другу, при этом законы
их движения по отношению к параллелепипе-
параллелепипеду задаются функциями d2 = /i2t3, d3 = h3t3.
Найти зависимость скорости параллелепипеда
от времени.
Решение. В систему включим три те-
тела — параллелепипед и обе тележки. Изо-
Изобразим внешние силы — активные силы веса
^*1» ^2» ^з» а также реакцию плоскости N.
Все они вертикальны, и сумма их проекций на
горизонталь равна нулю. Поэтому применим Рис. 29.
закон D) о сохранении проекции количества движения системы на ось х — за-
запишем QxQ в момент времени t0, затем Qx в произвольный момент времени t и
приравняем полученные величины:
Qx = mxvx +m2(v1 + d2) + m3(v1 - d3).
В последнем выражении скорости тележек подсчитывались в соответствии с
теоремой о скоростях при сложном движении точки. После приравнивания правых
1 равенств и проведения алгебраических выкладок получим
3t2(m2h2 - 'i
ttIj 4* ^2
338 Общие теоремы динамики механической системы
5.4. Теорема об изменении кинетического
момента
> Момент количества движения и кинетический момент.
Моментом количества движения материальной точки относи-
относительно неподвижного центра Р называется вектор КР) равный век-
векторному произведению радиуса-вектора, соединяющего центр с точ-
точкой, на количество движения точки:
ЙР = Йр(($) = г х mv.
Кинетическим моментом (главным моментом количества дви-
движения) механической системы относительно центра Р называется
геометрическая сумма моментов количеств движения всех точек си-
системы относительно центра
Моментом количества движения точки относительно оси х на-
называется величина Кх) равная проекции на эту ось момента количе-
количества движения точки относительно любого центра Р) принадлежа-
принадлежащего оси:
Вычисляется Кх так же, как момент силы относительно оси.
Кинетическим моментом системы относительно оси х называ-
называется проекция на нее момента системы относительно любого цен-
центра Р, принадлежащего оси:
Аналитическое выражение для кинетического момента системы
относительно оси х имеет вид
Формулы для Ку и К2 аналогичны приведенной.
Можно показать, что кинетический момент системы относитель-
относительно центра Р равен сумме момента количества движения центра масс
относительно центра Р и кинетического момента системы относи-
относительно центра масс С в ее относительном движении в системе Кёнига
Здесь МР = MP{mvc)) I\? —кинетический момент системы в ее
движении по отношению к системе отсчета Кёнига.
Кинетический момент Kz твердого тела, вращающегося относи-
относительно неподвижной оси z с угловой скоростью w, вычисляется по
формуле
К, = /,«, E)
где 12 —момент инерции твердого тела относительно оси z.
5.4. Теорема об изменении кинетического момента
339
р> Теорема об изменении кинетического момента механиче-
механической системы: производная по времени от кинетического момента
относительно любого неподвижного центра Р равна главному момен-
моменту внешних сил системы относительно того же центра:
dt
F)
Проектируя F) на оси координат (например, на ось ж), получим
теорему об изменении кинетического момента системы относительно
неподвижной оси:
dK
dt
X
G)
Если эту теорему применить к изучению движения твердого те-
тела, вращающегося вокруг неподвижной оси z, получим дифференци-
дифференциальное уравнение вращательного движения твердого тела вокруг
неподвижной оси:
где <р — угол поворота.
> Закон сохранения кинетического момента: если главный
момент внешних сил системы относительно центра Р равен нулю,
то главный момент количеств движения отно-
сительно этого центра будет постоянным. На-
Например,
если У^МР(Же)=0, то КР = const.
В правой части равенства располагается век-
вектор-константа, т.е. и величина вектора, и его
направление не зависят от времени.
Если сумма моментов внешних сил системы
относительно какой-либо неподвижной оси рав-
равна нулю, то кинетический момент системы от-
относительно этой оси остается постоянным. На-
Например,
если ]ГMx(Pf) = О, то Кх = const.
Рис. 30.
Пример. На однородный барабан веса G± и радиуса R намотана невесомая
нить с грузом веса G2 на конце (рис. 30). Определить ускорение груза, пренебре-
гэл силами трения при вращении барабана.
Решение. Включим в систему барабан,' груз и нить. Расставим внешние
илы активные силы веса Glf G2 и силу реакции No, проходящую через
340 Общие теоремы динамики механической системы
ось вращения О. Направление силы JVO заранее неизвестно, поэтому рисуем ее
произвольно. Пары сил трения в оси не возникает, что следует из условия задачи.
Воспользуемся теоремой об изменении кинетического момента системы от-
относительно оси вращения барабана G):
dIio. = Х^М„(Г?*\ (8)
dt
Подсчитывая Ко как сумму кинетических моментов барабана и груза, с
учетом A), E) и равенства v2 = u>xR получим
(9)
Вычислим сумму моментов внешних сил относительно оси
A0)
Подставив правые части формул (9), A0) в выражение (8) и проведя диффе-
дифференцирование, найдем
2т2
а = - д.
ml + 2m2
5.5. Теорема об изменении кинетической
энергии
> Элементарная работа. Рассмотрим точку 5, перемещающуюся
под действием системы сил. Малое перемещение точки вдоль траек-
траектории характеризуется вектором dr (рис. 31). Из системы выделим
^ одну силу F.
Элементарной работой силы F на пе-
перемещении dr называется скалярная ве-
величина cL4, равная скалярному произведе-
произведению векторов F и dr:
Рис. 31 dA = Р dr- Fdrcosa.
В координатной форме элементарная работа подсчитывается по
формуле
dA = Fxdx + Fydy + Fzdz,
где Fx) Fy) Fzi rfar, rfy, dz — координаты векторов F и dr соответ-
соответственно.
Следует подчеркнуть, что, несмотря на принятую форму записи,
элементарная работа dA не обязательно является полным дифферен-
дифференциалом некоторой функции, зависящей от координат.
Знак элементарной работы определяется косинусом угла а: она
положительна для 0 ^ а < тг/2, отрицательна для тг/2 < а ^ тг и равна
нулю при а = тг/2.
5.5. Теорема об изменении кинетической энергии 341
р. Вычисление элементарной работы в частных случаях.
1. Элементарная работа силы, приложенной к твердому телу,
вращающемуся вокруг неподвижной оси z, находится по формуле
2. Сумма элементарных работ сил пары, приложенной к телу,
вращающемуся вокруг неподвижной оси и при плоскопараллельном
движении, может быть подсчитана так:
dA = ±M dip.
Здесь М — момент пары сил, d<p — элементарный угол поворо-
поворота тела. Знак «плюс» берется при одинаковых направлениях дуго-
дуговых стрелок момента пары и напра-
направления вращения, «минус» — при раз-
различных направлениях (плоскость дей-
действия пары предполагается парал-
параллельной основной плоскости).
3. При вычислении элементарных
работ сил трения, приложенных к те-
телу, катящемуся без проскальзывания,
необходимо учесть, что в точке ка-
касания Р (рис. 32) действуют: сила
нормального давления 7v , сила тре-
трения FTp и пара сил трения качения с
моментом Мтр = Nk. Поскольку, в си- Рис' 32
лу отсутствия проскальзывания, точка касания является мгновенным
центром скоростей и ее скорость vP равна нулю, то и dr = vp dt = О,
откуда
dAN = dATp = 0, dAM = -Мтр d^ = -Nk dip.
4. Можно доказать, что сумма элементарных работ сил, прило-
приложенных к твердому телу, равна сумме элементарных работ статиче-
статически эквивалентной системы сил. По теореме о приведении системы
сил к заданному центру произвольную систему сил можно заменить
эквивалентной системой, состоящей из силы Я, приложенной в напе-
Ред заданной точке Р) и пары сил с моментом МР. Поэтому доволь-
довольно часто вместо громоздкого подсчета суммы элементарных работ
большого числа сил, приложенных к телу, подсчитывают сумму эле-
элементарных работ одной силы и одной пары.
Пример 1. Система элементарных сил тяжести твердого тела всегда имеет
Равно действу ющую, равную весу тела G, приложенную в центре тяжести С.
поэтому сумма элементарных работ сил тяжести равна работе силы веса на
перемещении центра тяжести тела.
Пример 2. Сумма элементарных работ внутренних сил, приложенных к
°чкам твердого тела, равна нулю, так как главный вектор и главный момент
Истемы внутренних сил равны нулю.
342 Общие теоремы динамики механической системы
> Работа силы. Потенциальная сила. Работа силы F на ко-
конечном перемещении точки по траектории DE (см. рис. 31) равна
криволинейному интегралу
= f dA= f P dr= f
DE DE DE
Сила называется потенциальной, если ее работа не зависит от
формы траектории, а зависит лишь от ее начальной и конечной точек.
Примером потенциальной силы является сила тяжести G, ее
работа может быть подсчитана по формуле
A = -G(z-z0).
Здесь ось z выбрана параллельно линии действия силы веса
и направлена ей навстречу, G — сила веса, z0, z — координаты
начальной и конечной точек траектории.
> Кинетическая энергия. Кинетической энергией точки мас-
массы га, движущейся со скоростью v, называется скалярная величина Т,
определяемая формулой
* mv2
2
Кинетической энергией механической системы называется сумма
кинетических энергий всех ее точек:
Можно доказать, что кинетическая энергия системы равна сумме
кинетической энергии центра масс и кинетической энергии системы
при ее относительном движении в системе отсчета Кёнига:
где т = Ylmj> a vj —относительные скорости точек.
> Формулы для кинетической энергии твердого тела:
а) при его поступательном движении: Т = уш^, •
б) при вращении вокруг неподвижной оси z: T = \1гш2,
в) при плоскопараллельном движении: Т = \rnv2c -f у/си;2, где
1С — момент инерции тела относительно оси, перпендикулярной
основной плоскости и проходящей через центр масс С.
5,5. Теорема об изменении кинетической энергии 343
^ разные формулировки теоремы о кинетической энергии.
Теорема об изменении кинетической энергии в дифференциальной
форме: дифференциал кинетической энергии механической системы
равен сумме элементарных работ сил, приложенных к точкам систе-
системы, на их элементарных перемещениях
Теорема об изменении кинетической энергии в интегральной
форме: изменение кинетической энергии механической системы при
некотором ее перемещении равно сумме работ всех сил, приложенных
к точкам системы, на перемещениях этих точек
Замечание. В отличие от трех ранее рассмотренных теорем
динамики системы последняя теорема характеризуется следующими
особенностями:
1) теорема об изменении кинетической энергии связывает не
векторные величины, а скалярные;
2) в правую часть равенства входят работы всех сил, не только
внешних, но и внутренних (возможно также разбиение суммы работ
на сумму работ активных сил и сил реакций связей);
3) сумма работ внутренних сил, приложенных к точкам твердого
тела, равна нулю.
Пример. Однородный диск под действием силы веса G скатывается без про-
проскальзывания по идеально шероховатой плоскости, наклоненной под углом а к
горизонту (рис. 33). Определить ускорение цен-
центра диска, величину силы трения и минимальное
значение коэффициента трения /*, при котором
возможно качение без проскальзывания.
Решение. В качестве механической систе-
системы выберем диск и применим для исследования
Движения теорему об изменении кинетической
энергии в дифференциальной форме A1). Под-
Подсчитывая кинетическую энергию диска, найдем
~ Рис. 33.
^Десь учтено, что Ic = ymr2 и vc = wr. Так
Как исследуемая система является твердым телом, то У^^1 = 0. Подсчитаем
сумм^элементарных работ внешних сил и, подставив наиденные выражения для
в равенство A1), получим
= mgr sin a dip.
Доделив обе части равенства на dt с учетом кинематических соотношений
= &с> Ф = ш, найдем
ас = ypsina. A2)
у
и
344 Принцип Даламбера. Аналитическая механика
Запишем формулировку теоремы о движении центра масс системы B) при-
применительно к рассматриваемой задаче
тас = & + Й + fTp.
Спроектируем полученное векторное равенство на две перпендикулярные
оси, первая из которых параллельна нормальной силе реакции N:
О = -Gcosa + N,
= G sin ot — <гТр*
С учетом A2) находим решение этой системы: FTp = yGsina, N = Gcosa.
Подставляя полученные величины в формулировку закона трения Кулона, опре-
определим минимальное значение коэффициента трения /*, при котором возможно
качение без проскальзывания: ,/* = у tga.
6. Принцип Даламбера. Элементы
аналитической механики
6.1. Принцип Даламбера
> Силы инерции. Принцип Даламбера. Пусть точка матери-
материальной системы движется под действием некоторой системы сил (эти
силы могут быть разбиты либо на внешние и внутренние, либо на ак-
активные и силы реакций связей). Равнодействующую этой системы
сходящихся сил обозначим F.
Силой инерции точки называется векторная величина Ф , равная
произведению массы точки на ее ускорение и направленная противо-
противоположно ускорению:
ф = —та.
Сила Ф фиктивна, она не входит в число реальных сил, действу-
действующих на точку.
Принцип Даламбера: при движении механической системы (точ-
(точки) любое ее состояние можно рассматривать как положение равнове-
равновесия, если к реальным силам, действующим на каждую точку системы,
добавить фиктивные силы инерции.
В соответствии с этим принципом, если к каждой точке системы
добавить силу Ф^ = — rrij Sj, то система сил, состоящая из реальных Fj
и фиктивных Ф^- сил, будет удовлетворять всем уравнением статики,
т.е. главный вектор системы сил и ее главный момент относительно
произвольного центра Р будут равны нулю:
6.1. Принцип Даламбера
345
В координатной форме эти уравнения записываются так:
Принцип Даламбера позволяет перенести методы решения задач
статики на задачи динамики.
Пример 1. В кабине лифта, поднимающегося замедленно с ускорением а,
находится груз веса G (рис. 34). Определить давление пола лифта на груз.
Решение. Примем груз за материальную точку и расставим реальные силы,
действующие на него,— активную силу веса G и силу давления пола на груз N.
Добавим к этим силам фиктивную силу инерции Ф = — та (обратите внима-
внимание: сила Ф на рисунке направлена не против
перемещения лифта, а противоположно вектору
ускорения).
Полученная система трех сил и, N, Ф урав-
уравновешена в соответствии с принципом Даламбе-
Даламбера. Линии действия всех сил направлены вдоль
одной прямой, поэтому равновесие системы опи-
описывается одним уравнением ]|Р Fz = 0, остальные
пять уравнений обращаются в тождества. Урав-
Уравнение равновесия имеет вид
-G +
= о.
Подставляя вместо Ф модуль силы инерции та
(знак минус был учтен на рисунке), имеем
N = G(g — о). Видно, что сила давления пола мень-
меньше веса груза.
Система сил инерции может оказаться громоздкой в случаях
большого количества материальных точек или распределенных масс.
Пользуясь теоремой статики о приведении системы сил к центру, си-
систему сил инерции Ф^ можно заменить эквивалентной системой, со-
состоящей из одной силы Ф , приложенной в наперед заданном центре Р
(она равна главному вектору сил инерции Ф = J2 $j и не зависит от
выбора центра), и одной пары сил, момент которой Мр равен глав-
главному моменту сил инерции относительно центра: Мр = ^Мр(Ф^).
Можно показать, что Ф подсчитывается по формуле
ф = —таС)
гДе m — масса системы, ас — ускорение центра масс.
* Выражения для главного модоента сил инерции твердого
и его проекций на координатные оси:
При поступательном движении: М? = 0.
346 Принцип Даламбера. Аналитическая механика
2. При вращении вокруг неподвижной оси z: М* = —12е<
3. При плоскопараллельном движении: М? = -1се.
Здесь е — угловое ускорение тела, Iz и 1С — моменты инерции
тела относительно оси z и оси, проходящей через центр масс перпен-
перпендикулярно основной плоскости (знаки «минус» в формулах означают,
что направления углового ускорения и момента пары сил инерции
противоположны).
Пример 2. Однородный диск радиуса г катится вверх без проскальзывания
по дуге окружности радиуса R (рис. 35). Коэффициент трения качения равен к.
Определить ускорение центра диска и силу давления диска на опору в тот момент,
когда скорость центра диска равна v0, а угол между вертикалью и прямой,
соединяющей центры диска и дуги, равен а.
Решение. Ускорение центра диска состоит из двух составляющих а? и ас,
причем направление атс заранее неизвестно, a ag. = г$/(Я- г). При отсутствии
проскальзывания атс = ег, где е — угловое ускорение диска.
Силы инерции диска приведем к центру масс, при этом силу инерции раз-
разложим на две составляющие Ф = Ф г + Ф п, где Ф r = -ma? и Ф n = -mag.
Величина момента пары сил инерции будет равна Мс = Ice = mra?,/2, соот-
соответствующую ему дуговую стрелку направим противоположно дуговой стрелке
предполагаемого углового ускорения.
Изображенная на рис. 35 система сил уравнове-
уравновешена в силу принципа Даламбера. Выпишем уравне-
уравнения равновесия для плоской системы сил:
FTp + <&r-Gsin а = 0, A)
iV-Ф"-Gcosa = 0, B)
-Мтр + Мс + Фт г- Gr sin a = 0. C)
u - Здесь A) — уравнение проекций на направле-
направление FTp, B) — уравнение проекций на направле-
направление N } C)-— уравнение моментов относительно цен-
центра Р. Присоединив к этим уравнениям закон Куло-
Рис. 35 на (см. гл. 3):
Мтр = kN,
получим окончательно систему четырех уравнений с
четырьмя неизвестными атс, TV, FTp, Мтр, решив которую, найдем:
аС = — \gr sin а + к (д cos а + —-— J, N = m(g cos a + —-— J .
6.2. Классификация механических связей,
Обобщенные координаты
> Классификация механических связей. Механическими связя-
связями называются некоторые устройства (тела), накладывающие огра-
ограничения на положения и скорости точек механической системы. Эти
ограничения выполняются всегда независимо от заданных сил и за-
записываются в виде соотношений, называемых уравнениями связей.
6,2. Классификация связей. Обобщенные координаты 347
Стационарными связями называются связи, не зависящие от вре-
времени; связи, зависящие от времени, называются нестационарными.
Связи, в уравнения которых входят координаты точек и время,
называются геометрическими; связи называются кинематическими
(дифференциальными), если в уравнения связей входят скорости,
координаты точек и время.
Если кинематическую связь можно «заменить» эквивалентной гео-
геометрической, то она называется кинематической интегрируемой, в
противном случае — неинтегрируемой.
Геометрические и кинематические интегрируемые связи называ-
называются голономными) а кинематические неинтегрируемые — неголо-
номными. Механическая система называется голономной, если на нее
наложены только голономные связи, и неголономной, если имеется
хотя бы одна неголономная связь.
Связи называются неосвобождающими, если ограничения, накла-
накладываемые ими на положения точек, их скорости и время, могут быть
записаны в форме равенств. Освобождающие связи записываются в
форме неравенств.
^ Возможным (виртуальным) перемещением точки механиче-
механической системы называется любое допускаемое наложенными связями
перемещение 8г из положения, занимаемого точкой в данный момент
времени (при построении таких перемещений надо мысленно остано-
остановить время, при этом нестационарные связи станут неподвижными,
т.е. — стационарными). Возможные перемещения точка не соверша-
совершает, но могла бы совершить, не нарушая связей в данный момент вре-
времени.
Возможным перемещением системы называется любая совокуп-
совокупность возможных перемещений точек системы 8г^ допускаемых все-
всеми наложенными на нее связями.
В качестве примера рассмотрим точку, на которую наложена не-
нестационарная связь —- плоскость, движущаяся поступательно со ско-
скоростью v (рис. 36). В соответствии с теоре-
теоремой о сложном движении точки ее действи-
действительное перемещение dr равно геометриче-
геометрической сумме относительного 8г и переносно-
переносного, равного vdt. На рисунке видна разница
между действительным и возможным пере- р 36
мещениями точки.
Для стационарных связей действительные перемещения точек на-
находятся среди возможных.
Механическая система может иметь множество различных воз-
возможных перемещений. Однако для систем, состоящих из материаль-
материальных твердых тел и конечного количества материальных точек, су-
348
Принцип Даламбера. Аналитическая механика
ществует некоторое число независимых между собой возможных пе-
перемещений, через которые можно выразить любое другое возмож-
возможное перемещение. Число независимых перемещений называется чис-
числом степеней свободы механической системы.
> Обобщенными координатами называются независимые меж-
между собой параметры, которые однозначно определяют положение ка-
каждой точки механической системы. В случае голономной системы чи-
число степеней свободы равно числу обобщенных координат, в случае
неголономной системы число степеней свободы меньше числа обоб-
обобщенных координат.
Рассмотрим конкретные примеры.
1. Свободная материальная точка в пространстве является систе-
системой с тремя степенями свободы.
2. Свободное твердое тело имеет шесть степеней свободы. Дей-
Действительно, положение любой точки тела в пространстве можно опре-
определить, зная положение трех его точек ВХ) В2) 53, не лежащих на од-
одной прямой. Положение каждой из точек можно задать тремя пара-
параметрами, например, координатами Xj, у^ Zj (j = 1, 2, 3). Общее число
координат равно девяти, но эти 9 чисел не могут задаваться произ-
произвольно, так как они связаны тремя уравнениями, согласно которым
расстояния dl2) d23) d31 между точками должны оставаться постоян-
постоянными, поскольку они принадлежат твердому телу. Если, например,
известны шесть координат хХ) уХ) zv x2) у2) х3) то оставшиеся три
Z2> %> Z3 могут быть найдены из уравнений связей.
3. Тело, вращающееся вокруг неподвижной оси, имеет одну сте-
степень свободы, и в качестве обобщенной координаты можно выбрать
угол поворота (р.
4. Твердое тело при плоскопараллельном движении имеет три сте-
степени свободы, в качестве обобщенных координат можно, например,
выбрать угол поворота и две декарто-
декартовы координаты какой-либо точки те-
тела.
5. Твердое тело при поступатель-
поступательном движении имеет три степени сво-
свободы, в качестве обобщенных коорди-
координат можно выбрать три декартовы ко-
координаты какой-либо точки тела.
6. Система, состоящая из призмы,
положенной на плоскость, и диска, ка-
катящегося без проскальзывания по бо-
боковой грани призмы, имеет две степени свободы (рис. 37).
7. Система, состоящая из двух свободных точек, имеет шесть
степеней свободы.
Л"
Рис. 37.
6.3. Принцип возможных перемещений 349
8. Механизм швейной машины, состоящий из большого числа
твердых тел, имеет одну степень свободы.
9. Тонкий прямолинейный стержень на плоскости, который дол-
должен двигаться так, чтобы скорость его центра была параллельна оси
стержня, имеет две степени свободы.
Из приведенных примеров механических систем лишь одна —
последняя — была неголономной, остальные были голономными.
Вернемся снова к понятию обобщенных координат, взяв для
иллюстрации систему из примера 6. Положение каждой точки диска
и призмы будет известно, как только будут заданы значения величин,
входящих в один из наборов, состоящих из двух параметров: (хг, х2))
или (я?!, d2), или (а?2, ф2), или (х1} ф2)} или ql = \{хх+х2)} Ь = ТЖ1~Ж2
и т.д.
Подведем итоги: для рассматриваемой системы вариантов выбора
обобщенных координат существует бесконечно много, но каждый
фиксированный набор всегда содержит две независимые величины.
Так как данная система голономна, число обобщенных координат
равно двум, т.е. числу степеней свободы. Координаты называются
обобщенными, поскольку они могут не иметь явно выраженного
геометрического смысла, как, например, в случае координат qlt q2.
> Идеальные связи. Связи называются идеальными, если сумма
работ их реакций Щ равна нулю на любом возможном перемещении
системы:
Примером системы с идеальными связями служит свободное твер-
твердое тело. Любой сложный механизм, состоящий из нескольких твер-
твердых тел, можно трактовать как механическую систему с идеальными
связями, если тела соединены абсолютно жестко, при помощи идеаль-
идеальных шарниров (без трения), невесомыми нерастяжимыми идеально
гибкими нитями. Кроме того, поверхности соприкосновения должны
быть либо абсолютно гладкими, либо идеально шероховатыми, когда
одно из тел катится по другому без проскальзывания.
6-3. Принцип возможных перемещений
Принцип возможных перемещений: для равновесия механической
системы с идеальными связями необходимо и достаточно, чтобы
сумма элементарных работ активных сил Fj на любом возможном
перемещении системы была равна нулю.
Математическая запись принципа возможных перемещений:
350 Принцип Даламбера. Аналитическая механика
Пример. Найти угол ip отклонения от вертикали оси тяжелого однородного
стержня веса G, к нижнему концу которого В приложена горизонтальная сила F
(рис. 38).
Решение. В механическую систему включим стержень,
////// являющийся твердым телом. Пренебрегая трением в шарни-
шарнире, заключаем, что связи, наложенные на систему, идеальные
и к исследованию ее равновесия можно применить принцип
возможных перемещений.
Из состояния равновесия, характеризуемого углом ip,
сообщаем системе возможное перемещение — поворачиваем
стержень на малый угол Sip вокруг шарнира Я в сторону уве-
увеличения угла,<?, подсчитываем сумму элементарных работ ак-
активных сил G и F и приравниваем ее нулю:
—GL sin ipSip + F2L cos ip Sip = 0
(принимаем длину стержня равной 2L), или после преобразо-
преобразований:
Sip {-GL sin ip 4- F2L cos ip) = 0.
Поскольку возможное перемещение Sip произвольно, то для того, чтобы про-
произведение было равно нулю, необходимо приравнять нулю выражение, заключен-
заключенное в круглые скобки:
-GL sin ip 4- F2L cos ip = 0.
Отсюда находим искомый угол ip = arctgBF/G).
6.4. Общее уравнение динамики
(принцип Даламбера — Лагранжа)
Формулировка общего уравнения динамики: механическая систе-
система, на которую наложены идеальные связи, движется так, что в ка-
каждый момент времени сумма элементарных работ всех активных
сил Fj и сил инерции Ф; на любом возможном перемещении системы
равна нулю. Математическая формулировка принципа Даламбера —
Лагранжа:|
Пример. По гладкой горизонтальной поверхности движется прямоугольный
параллелепипед массы mlt по его верхней идеально шероховатой поверхности ка-
катится однородный диск массы т2 и радиуса г2, к центру которого приложена
постоянная горизонтальная сила F2 (рис. 39, а). Найти ускорения параллелепипе-
параллелепипеда Oj и центра диска а2.
Решение. Рассмотрим систему, состоящую из параллелепипеда и диска. На-
Наложенные связи являются идеальными, и для изучения движения системы можно
применить общее уравнение динамики. В качестве координат, определяющих по-
положение системы, выберем абсолютную координату параллелепипеда хх и коор-
координату х2, характеризующую положение диска по отношению к параллелепипеду.
Векторы ускорений параллелепипеда ах и центра диска а2 горизонтальны, их
величины ах = 'хх, а2 = хг +х2, угловое ускорение диска е2 = х2 /г2. Предполагаемые
направления векторов cix, a2 и соответствующее им направление дуговой стрел-
стрелки е2 изображены на рис.39, 6. К активным силам F2» ^М» ^2 ( ^1 > С*2~~~силы
6.5. Уравнения Лагранжа второго рода
351
веса параллелепипеда и диска) добавим силы инерции Ф х = — т1а1, Ф2 = —
и пару сил инерции с моментом М2 = — /2с?2 (см- Рис- 39, б").
Сообщим системе возможное перемеще-
перемещение, увеличив координаты хх, х2 fta величины
8xi, 8x2. При этом диск повернется на угол
5<р2=8х2/г2.
Подсчитаем сумму элементарных работ
активных сил и сил инерции на возможном пе-
перемещении и приравняем ее нулю:
8х2)-т1а18х1 -
-f Sx2) - /2Ce2
= О-
После преобразований получим
хх [F2 - т1'х1 - тп2(х1 + х2)] +
+5x2[F2 - гп2(х1 + х2) - \]
=0. D)
Здесь возможные перемещения 8хг и 8х2
могут принимать произвольные независимые
между собой значения. Чтобы равенство ну-
нулю выполнялось всегда, необходимо, чтобы
оба выражения, стоящие множителями при 8х^ и 8х2 и заключенные в квадратные
скобки, были равны нулю. Таким образом, равенство D) распадается на систему
двух уравнений с двумя неизвестными
F2 - ml'xl - m2('xl + х2) = О,
F2 - m2('x1 + х2) - \rn2'x2 = 0.
Решая систему, найдем
4" 7712
а2 =
•¦ ^B771! +77l2)
а?2 = — \
4" m2/
6.5. Уравнения Лагранжа второго рода
Для описания движения голономной механической системы с п
степенями свободы, на которую наложены идеальные связи, исполь-
используют уравнения Лагранжа второго рода
d(dT
дТ
з 1|2
F)
Здесь qj — обобщенные координаты) количество которых равно
числу степеней свободы n, q^ — обобщенные скорости, равные про-
производным по времени от обобщенных координат, Т — кинетическая
энергия системы, Qj — обобщенные силы.
352 Принцип Даламбера. Аналитическая механика
Величины Т и Qj должны быть представлены в виде функций
обобщенных скоростей, обобщенных координат и времени:
Обобщенные силы находятся из выражения для суммы элементарных
работ активных сил F{ на возможном перемещении системы, преобра-
преобразованного к виду
Количество обобщенных сил равно числу степеней свободы.
Физическая размерность обобщенной силы Qj зависит от размер-
размерности соответствующей обобщенной координаты fy, так как размер-
размерность их произведения Qj Sqj должна совпадать с размерностью ра-
работы силы. По этой причине Qj может не иметь явного физического
смысла, отсюда и ее название — обобщенная сила.
После подстановки в F) функций Т и Qj получается система
обыкновенных дифференциальных уравнений второго порядка, ко-
которую необходимо интегрировать с учетом начальных условий.
Пример. Чтобы наглядно проявились достоинства изложенной методики,
составим в форме уравнений Лагранжа второго рода дифференциальные уравне-
уравнения движения механической системы, рассмотренной в примере из разд. 6.4.
Решение. Рассмотрим систему, состоящую из параллелепипеда и диска. На-
Наложенные связи являются голономными и идеальными, поэтому можно применять
уравнения Лагранжа второго рода. Система имеет две степени свободы; в каче-
качестве обобщенных координат, определяющих ее положение, выберем абсолютные
координаты параллелепипеда qx = х1 и центра диска q2 = хг + х2 (см. рис. 39, а).
Запишем выражение кинетической энергии системы и приведем его к виду
функции, зависящей от qx, q2, qx] q2, t:
T = T 4-T = mi^ 4. m2vC2 , 1С2Ш2 mi9i .
12 222 22 2
При проведении выкладок использована формула A) из гл. 5 и кинематиче-
кинематическое соотношение и>2 = (q2 — qi)/r2.
Из-за простой кинематики и удачного выбора обобщенных координат оказа-
оказалось, что в выражение кинетической энергии не входят ни обобщенные коорди-
координаты, ни время.
Вычислим обобщенные силы. Для этого подсчитаем сумму элементарных
работ активных сил G^, G2, F2 на возможном перемещении системы, задаваемом
вариациями 5qx, 8q2, направленными в сторону увеличения координат q1 и q2:
F2 S(i2 = 0*9l + F2 Sq2.
Коэффициенты, стоящие при вариациях обобщенных координат, являются
искомыми выражениями обобщенных сил, откуда
Q1=0, Q2=F2.
Список литературы 353
Осталось записать систему уравнений движения F):
дТ \ дТ
lit '
_d_ (_дт\ _ ЭТ
dt \dq2) dq2 ~
С учетом найденных выражений Т, Q1 nQ2 после соответствующих преобра-
преобразований уравнения движения принимают следующий вид:
= F2-
Решение системы G) совпадает с решением E) этой же задачи, полученным
ранее иным способом.
В отличие от уравнений Лагранжа второго рода, общее уравне-
уравнение динамики пригодно также для изучения неголономных систем,
поэтому оно имеет более широкие возможности применения. В то же
время применение уравнений F) для исследования голонрмных си-
систем более предпочтительно, так как оно требует меньшего количе-
количества простых действий.
Список литературы
Айзенберг Т. Б., Воронков И. М., Осецкий В. М. Руководство к решению задач
по теоретической механике. — М.: Высшая школа, 1968. — 419 с.
Айзерман М. А. Классическая механика. — М.: Наука, 1980. — 368 с.
Батпь М. И., Джанелидзе Г. Ю.,~ Кельзон А. С. Теоретическая механика в
примерах и задачах, т. 1. Статика и кинематика. — М.: Наука, 1990. — 672 с.
Батпь М. И., Джанелидзе Г. Ю., Кельзон А. С. Теоретическая механика в
примерах и задачах, т. 2. Динамика. — М.: Наука, 1991. — 639 с.
Батпъ М. И., Джанелидзе Г. Ю., Кельзон А. С. Теоретическая механика в
примерах и задачах, т. 3. Специальные главы механики. — М.: Наука, 1993.—
487 с.
Бутпенин Н. В. Введение в аналитическую механику. — М.: Наука, 1991 — 256 с.
Бухгольц Н. Н. Основной курс теоретической механики, ч. 1. Кинематика,
статика, динамика материальной точки. — М.: Наука, 1972. — 467 с.
Бухгольц Н. Н. Основной курс теоретической механики, ч. 2. Динамика системы
материальных точек. — М.: Наука, 1972. —332 с.
Воронков И. М. Курс теоретической механики.— М.: Наука, 1964. — 596 с.
Гантпмахер Ф. Р. Лекции по аналитической механике. — М.: Наука, 1966. — 300 с.
Добронравов В. В., Никитин Н. Н. Курс теоретической механики.—М.: Высшая
школа, 1983. — 575 с.
шлинский А. Ю. Классическая механика и силы инерции. — М.: Наука, 1987.—
320 с.
1* А.. Д. Полянин, В. Д. Полянин и др.
354 Список литературы
Лойцянский Л. Г., Лурье А. И. Курс теоретической механики, т. 1. Статика и
кинематика. — М.: Наука, 1982. — 352 с.
Лойцянский Л. Г., Лурье А. И. Курс теоретической механики, т. 2. Динамика.—
М.: Наука, 1983. — 640 с.
Марке ев А. П. Теоретическая механика. — М.: Наука, 1990. — 414 с.
Мещерский И. В. Сборник задач по теоретической механике. — М.: Наука, 1986 —
448q.
Сборник заданий для курсовых работ по теоретической механике. / Под ред.
Яблонского А.А. — М.: Высшая школа, 1985 — 368 с.
Торг С. М. Краткий курс теоретической механики. — М.: Высшая школа, 1995. —
416 с.
Яблонский А. А., Никифорова В. М. Курс теоретической механики, ч. 1. Статика.
Кинематика. — М.: Высшая школа, 1984. — 343 с.
Яблонский А. А., Никифорова В. М. Курс теоретической механики, ч. 2. Дина-
Динамика.— М.: Высшая школа, 1984. — 423 с.
СОПРОТИВЛЕНИЕ
МАТЕРИАЛОВ
Основные обозначения
А — площадь поперечного сечения;
D — диаметр стержня;
F — сила;
FKp — критическая сила;
G — модуль упругости второго рода;
1р — полярный момент инерции стержня;
1Х, 1у — осевые моменты инерции стержня;
г — радиус инерции стержня;
/с — кривизна оси стержня;
/ — длина (стержня);
Мх, Му — изгибающие моменты;
Mz — крутящий момент;
N — продольная сила;
п — коэффициент запаса;
Qxi Qy — поперечные силы;
q — распределенная вдоль оси нагрузка;
Зхт Зу — статические моменты плоской фигуры относительно осей х и у;
3?тс — статический момент отсеченной части поперечного сечения относи-
относительно оси х;
Wp — полярный момент сопротивления сечения;
W*» Wy — осевые моменты сопротивления сечения;
'х, у, z — прямоугольные декартовы координаты;
7 — угловая деформация;
е — линейная деформация;
А — гибкость стержня;
М — коэффициент приведенной длины;
v — коэффициент Пуассона;
0" — нормальное напряжение;
°"кр — критическое напряжение;
М — допускаемое нормальное напряжение;
т — касательное напряжение;
М — Допускаемое касательное напряжение;
Ч> — угол.
356 Основные понятия
1. Основные понятия
1.1. Введение. Внешние и внутренние силы
> Деформация, прочность и жесткость. Сопротивление мате-
материалов представляет собой часть механики, в которой рассматрива-
рассматриваются вопросы расчета элементов конструкций на прочность, жест-
жесткость и устойчивость.
Сопротивление материалов опирается на знания теоретической
механики. Но если объектом теоретической механики является абсо-
абсолютно твердое тело, то в сопротивлении материалов рассматривают-
рассматриваются деформируемые твердые тела.
На практике реальные части машин и сооружений подвергаются
воздействию разного рода сил. Под действием этих сил происходит
деформация тел, т.е. изменение взаимного расположения частиц ма-
материала. Если силы достаточно велики, возможно разрушение тела.
Способность тела воспринимать нагрузки без разрушения и боль-
больших деформаций называют соответственно прочностью и жестко-
жесткостью.
Некоторые состояния равновесия тел и конструкций оказываются
неустойчивыми, т.е. такими, при которых незначительные механиче-
механические воздействия, как правило, случайного характера, могут приве-
привести к существенным отклонениям от этих состояний. Если же от-
отклонения также невелики, то такие состояния равновесия называют
устойчивыми.
> Внешние силы. К внешним силам, действующим на конструк-
конструкцию, относятся активные силы (нагрузки) и реакции внешних связей.
Различают несколько видов нагрузок.
Сосредоточенная сила, приложенная в точке. Ее вводят вместо
реальных сил, действующих на небольшой участок поверхности эле-
элемента конструкции, размерами которого можно пренебречь.
Распределенные силы. Например, силы давления жидкости на дно
сосуда относятся к распределенным по поверхности нагрузкам и из-
измеряются в единицах Н/м2, а силы веса — к нагрузке, распределен-
распределенной по объему и измеряемой в Н/м3. В ряде случаев вводят нагрузку,
распределенную по линии, интенсивность которой измеряется в Н/м.
Одним из вариантов нагрузок является сосредоточенный момент
(пара сил).
> Внутренние силы в стержне. Наиболее распространенным
элементом конструкций является стержень, поэтому в сопротивлении
материалов ему уделяют главное внимание.
Продольная ось и поперечное сечение — основные геометрические
элементы стержня. Принимается, что поперечные сечения стержня
1.1. Введение. Внешние и внутренние силы
357
Рис. 1.
перпендикулярны продольной оси, а продольная ось проходит через
центры тяжести поперечных сечений.
Внутренними силами стержня называют силы взаимодействия
между его отдельными частями, возникающие под действием внеш-
внешних сил (предполагается, что в отсутствие внешних сил внутренние
силы равны нулю).
Рассмотрим стержень, находящийся в равновесии под действием
некоторой системы внешних сил (рис. 1, а). Мысленно проведем про-
произвольное поперечное сечение, которое делит стержень на две части
Л и П. На правую часть П стержня со стороны левой части Л дей-
действует система распределенных по поверхности поперечного сечения
сил — внутренних сил по отношению к стержню в целом. Эту систему
сил можно привести к главному вектору R и главному моменту М,
взяв центр тяжести сечения — точку О — в качестве центра приве-
приведения.
> Внутренние силовые факторы. Выберем систему координат,
расположив оси ж, у в поперечном сечении, а ось z перпендикулярно
ему, и разложим R и М на составляющие по этим осям: Qx, Qy, N и
Мх, Му, Мг (рис. 1, б).
Эти шесть величин называются внутренними силовыми фактора-
факторами стержня (или внутренними усилиями) в рассматриваемом сече-
сечении. Каждое из этих усилий имеет свое название, соответствующее
его направлению или определенному виду деформации стержня, кото-
который вызывается этим усилием. Силы Qx и Qy называются попереч-
поперечными (перерезывающими) силами, а N — нормальной (продольной)
силой. Моменты Мх и Му называются изгибающими моментами, а
Mz крутящим моментом.
Метод сечений. Так как отсеченная часть стержня П находит-
в Равновесии, можно составить шесть уравнений статики для дей-
вУкхцих на эту часть сил, из которых определяются все шесть вну-
358
Основные понятия
тренних силовых факторов
Этот способ определения внутренних усилий называют методом
сечений.
На основании закона действия и противодействия правая часть
стержня действует на левую с такими же, но противоположно напра-
направленными усилиями, поэтому их можно также определить, исходя из
равновесия части Л стержня.
1.2. Напряжения и деформации в точке
> Напряжения. Вектором напряжения р называется интенсив-
интенсивность распределенных по сечению внутренних сил в некоторой точ-
точке сечения (рис. 2). Его составляющие, ле-
лежащие в плоскости сечения, называются ка-
касательными напряжениями тх, ту, а соста-
составляющая, перпендикулярная сечению, — нор-
нормальным напряжением а. Напряжения изме-
измеряются в единицах Н/м2 (Па) и зависят не
только от выбора точки, но и от ориентации
сечения (или площадки cL4, рис. 2), проходя-
проходящего через эту точку. Вся совокупность на-
напряжений в заданной точке для разных пло-
площадок называется напряженным состояни-
состоянием в этой точке.
При известных напряжениях в сечении стержня его внутренние
силовые факторы могут быть найдены по формулам
х
Рис. 2.
N =
= rxdA,
= lrydAi
М.
= - [trydA, My = - /crxdA, Mz= f(ryx-
A)
A A A
где интегрирование распространено на всю площадь сечения А.
> Деформации. Рассмотрим произвольную точку К тела в началь-
начальном недеформированном состоянии и проведем через нее в направле-
направлении осей х и у два бесконечно малых отрезка длиной dx и dy (рис. 3).
Под действием нагрузки происходит деформация тела, точка К
перемещается в точку К\ отрезки dx и dy изменяют свою длину на
величины Ах и Ду, а угол 7г/2 между ними изменяется на у .
1.3. Основные понятия и допущения
359
Отношения
Ах
Ау
°*- dx' у dy
называются линейными деформациями в
точке К в направлении осей а: и у со-
соответственно, а величина уху — угловой
деформацией (углом сдвига) в точке К
между осями х и у. Вся совокупность
линейных и угловых деформаций для
различных направлений, проходящих че-
через рассматриваемую точку, называет-
называется деформированным состоянием в этой
точке.
П
1.3. Основные понятия и допущения
^ Упругостью называют свойство тела, выражающееся в одно-
однозначной зависимости между силами, действующими на тело, и его
деформациями.В частности, упругое тело после снятия нагрузок воз-
возвращается в исходное состояние.
В некоторых случаях после снятия нагрузок исчезает лишь часть
полной деформации, называемая упругой. Оставшаяся часть — так
называемая остаточная (пластическая) деформация связана со
свойством тела, которое называется пластичностью.
> Основные допущения, принятые в сопротивлении мате-
материалов:
1. Тела считаются сплошными (без пустот) и однородными, т.е.
свойства материала тела в разных точках одинаковы.
2. Материал тела изотропен, т.е. его свойства по всем направле-
направлениям одинаковы. (В ряде случаев приходится отказываться от это-
этого допущения для анизотропных тел, свойства материала которых в
разных направлениях различаются. Например, свойства дерева в на-
направлении вдоль волокон и поперек различны.)
3. Деформации тела в каждой точке прямо пропорциональны на-
напряжениям в этой точке. Это свойство называют линейной упруго-
упругостью или законом Гука.
4. Предполагается малость деформаций тела, а также малость
перемещений его точек по сравнению с геометрическими размерами
самого тела.
5- Справедлив принцип независимости действия сил (принцип
Уперпозиции), согласно которому какая-либо величина а, зависящая
действия нескольких сил, равна сумме величин аг-, найденных от
ж дои силы в отдельности. Этот принцип следует из допущений
о и 4.
360
Напряженно-деформированное состояние в точке
2. Напряженно-деформированное
состояние в точке
2.1. Виды напряженного состояния
> Главные напряжения и главные направления. Анализ на-
напряженного состояния в некоторой точке К тела удобно проводить,
мысленно выделяя элементарный параллелепипед в окрестности этой
точки и рассматривая напряжения, действующие на его грани. Ввиду
малости параллелепипеда можно считать, что напряженное состояние
во всех его точках одинаково (однородно) и совпадает с напряжен-
напряженным состоянием в исследуемой точке К. Изменяя ориентацию этого
параллелепипеда, можно добиться того, чтобы все его грани были
свободны от касательных напряжений. Соответствующие нормаль-
нормальные напряжения называются главными напряжениями, а их напра-
направления— главными направлениями в точке К.
Различают линейное, плоское и объемное (одноосное, двухосное
и трехосное) напряженные состояния в точке в зависимости от
того, испытывает ли параллелепипед, ориентированный по главным
направлениям, растяжение (или сжатие) соответственно в одном,
двух или трех взаимно перпендикулярных направлениях.
> Плоское напряженное состояние. Закон парности. В
дальнейшем ввиду особой важности ограничимся случаем плоско-
плоского напряженного состояния, при кото-
котором на двух противоположных гранях
элементарного параллелепипеда напря-
напряжения отсутствуют. На остальных гра-
гранях в общем случае их ориентации дей-
действуют касательные и нормальные на-
напряжения (рис. 4). Из однородности на-
напряженного состояния параллелепипеда
следует, что одноименные напряжения
на противоположных гранях численно
равны. Очевидно, что нормальные уси-
усилия на гранях параллелепипеда взаимно
уравновешены. Касательные усилия на тех же гранях образуют две
пары сил с моментами (ту dy dx) dz и (гг dz dx) dy противоположного
направления, где dx, dy, dz — размеры параллелепипеда. Эти момен-
моменты должны быть уравновешены, откуда rz = ту.
Последнее равенство выражает закон парности касательных на-
напряжений: на любых взаимно перпендикулярных площадках каса-
касательные напряжения равны по величине и направлены так, что стре-
2.3. Чистый сдвиг 361
мятся вращать элемент в противоположные стороны (рис. 4). Сказан-
Сказанное позволяет ввести единое обозначение: т = т2 = ту.
2-2- Одноосное растяжение и сжатие
р> Модуль упругости первого рода. Рассмотрим элементар-
элементарный параллелепипед в состоянии одноосного растяжения или сжатия,
на двух противоположных гранях ко-
которого действуют только нормальные
напряжения (рис. 5).
Правило знаков: растягивающие
напряжения считаются положительными, а сжимающие — отрица-
отрицательными.
В соответствии с законом Гука напряжение и линейная деформа-
деформация в направлении оси z прямо пропорциональны:
<? = Ее2. A)
Коэффициент пропорциональности Е называется модулем упру-
упругости первого рода и имеет размерность напряжения, так как ez —
безразмерная величина. При or > 0 (растяжение) ez — также больше
нуля, что соответствует удлинению параллелепипеда в направлении
оси z. При а < 0 (сжатие) имеем е2 < 0, что соответствует укороче-
укорочению параллелепипеда.
> Коэффициент Пуассона. Линейные деформации в направлении
осей х и у из соображений симметрии равны между собой и также
пропорциональны напряжению или, с учетом A), деформации ez:
Постоянный безразмерный коэффициент пропорциональности v
называется коэффициентом Пуассона, а знак минус учитывает раз-
разные знаки продольной ez и поперечных ех, еу деформаций. В частно-
частности, при а > 0, ez > 0 величины ех, еу меньше нуля, т.е. поперечные
размеры параллелепипеда уменьшаются.
Постоянные величины Е и v характеризуют упругие свойст-
ва конкретного материала, например для стали Е = 210 ГПа,
" = 0,25 4-0,3.
2-3. Чистый сдвиг
Чистый сдвиг. Рассмотрим частный вид плоского напряженно-
0 состояния, при котором на боковые грани элементарного паралле-
И действуют только касательные напряжения г (рис. 6, а). По
362 Напряженно-деформированное состояние в точке
Рис. 6.
закону парности напряжения на соседних гранях одинаковы. Такой
вид напряженного состояния называется чистым сдвигом.
Характер деформации параллелепипеда показан на рис. 6, б.
Первоначально прямые углы между боковыми гранями изменяются
на величину 7> называемую углом сдвига, а линейные деформации
ех,еу, ez равны нулю.
> Модуль сдвига. Закон Гука в данном случае имеет вид
г = Gj. C)
Коэффициент пропорциональности G называют модулем сдвига
или модулем упругости второго рода. Размерность модуля совпада-
совпадает с размерностью напряжений.
Нетрудно видеть, что при dy — dz диагональный отрезок АВ
параллелепипеда укорачивается, а отрезок CD удлиняется на одну
и ту же величину А = у dy sin 45° (рис. 6, 5), поэтому на другой
элементарный параллелепипед, выделенный в окрестности той же
точки и повернутый на угол 45° относительно первого, должны
действовать соответствующие нормальные напряжения а (рис. 6, в).
Касательных напряжений здесь уже не будет, поэтому нормальные
напряжения а — главные напряжения, а их направления — главные
направления для данного напряженного состояния.
V?6dxctz > Связь между Gr, Е и и. Рассмотрим
элемент, образованный диагональным разре-
разрезом параллелепипеда (рис. 7). На его грани
действуют силы, по величине равные rdxdy,
г dx dz и a dx dz/cos 45°.
Из равновесия этого элемента можно по-
получить
*=т. D)
С учетом C), D) деформация отрезка CD
(рис. б, б) равна eCD = A/CD = \y = \r/G = \<r/G.
С другой стороны, рассматривая состояние на рис. б, в как
комбинацию двух одноосных напряженных состояний (растяжения и
Tdxdz
3.1. Продольная сила
363
сжатия по перпендикулярным направлениям), из закона Гука A), B)
а ист a a va E
получим eCD = - + —. Отсюда — = - + — или G = -^щ.
Таким образом, модуль сдвига G определяется через уже введен-
введенные постоянные Е и v.
3. Центральное растяжение и сжатие
3.1. Продольная сила
Центральным растяжением (сжатием) называется такой вид де-
деформации стержня, при котором в его поперечных сечениях возни-
возникает только продольная сила 7V, а все остальные внутренние усилия
равны нулю.
Правило знаков: растягивающие продольные силы считаются по-
положительными, а сжимающие — отрицательными.
Пример. На рис. 8, а показан стержень, нагруженный двумя силами F1
и F2, лежащими на его оси. Для определения продольной силы используем метод
сечений (см. разд. 1.1). Проведем произвольное сечение / на участке «а» стержня
и рассмотрим равновесие свободной отсеченной части (рис. 8, б). Действие
отброшенной части заменим неизвестной силой NXi считая ее положительной.
Из уравнения равновесия этой отсеченной части в форме равенства нулю суммы
проекций всех сил на ось z: Л^ — F1 = 0 следует Л^ = F± =20 кН. Аналогично для
сечения // на участке «Ь» стержня получим (рис. 8, в) N2 + F2 — Fx =0, откуда
N2=F1- F2 = -40 кН.
г
К"г
20
Рис. 8.
Таким образом, продольная сила на участках «а» и «Ь» стержня различна.
Участок «а» стержня испытывает растяжение (N > 0), а участок «Ь» — сжатие
(N < 0). При переходе от участка «а» к участку «Ь» сила JV изменяется скачком
на величину силы F2.
364 Центральное растяжение и сжатие
Для иллюстрации характера изменения продольной силы вдоль
стержня принято строить график функции N(z), называемый эпюрой
продольной силы. На этом графике указывают числовые значения
продольной силы в характерных сечениях, а также их знаки. Для
рассмотренного примера эпюра N(z) показана на рис. 8, г.
3.2. Напряжения и деформации
при растяжении или сжатии
> Гипотеза плоских сечений. Для определения напряжений при
растяжении или сжатии примем гипотезу плоских сечений: попереч-
поперечные сечения стержня после деформации остаются плоскими и пер-
перпендикулярными оси стержня. Опыт показывает, что эта гипотеза
нарушается только для областей так называемых местных напряже-
напряжений, в непосредственной близости от точек приложения внешних сил,
или в местах резкого изменения площади поперечного сечения, где
происходит так называемая концентрация напряжений. Их учет со-
составляет особую задачу, нами не затрагиваемую.
/ > Формулы для напряжений
а) ^ I I ^ и деформаций. Рассмотрим стер-
жень, растягиваемый двумя силами
j (рис. 9, а). В соответствии с гипо-
ч F I \±б тезой плоских сечений и постоян-
5) «*— \Z—^
i 1-> z ством продольной силы вдоль стер-
жня (N = F), напряженное и дефор-
деформированное состояние точек стер-
стержня вне окрестности концов однородно и нормальные напряжения
по поперечному сечению распределены равномерно (рис. 9, б).
Из формулы A) гл. 1 следует N = JA<rdA = а А, отсюда
Формула A) позволяет вычислять нормальные напряжения в
поперечных сечениях стержня при центральном растяжении или
сжатии по известной продольной силе 7V и площади поперечного
сечения А.
Выделенный из стержня элементарный параллелепипед находится
в условиях одноосного растяжения (рис. 5, а). Его деформации
определяются из закона Гука (см. разд. 2.2). В частности, продольная
деформация
- !L - JL.
?z ~ ~E ~~ ~ЕА'
3.3. Расчеты на прочность при растяжении и сжатии 365
Суммируя удлинения малых элементов по всей длине стержня,
получим его абсолютное удлинение
-i:
Д/ - ^ „, „. _ „,. - ^ ,
где / — длина стержня.
Величина ЕА называется жесткостью сечения стержня при
растяжении и сжатии.
3.3. Расчеты на прочность при растяжении
и сжатии
^ Допускаемое напряжение. Для обеспечения прочности стерж-
стержня, испытывающего растяжение или сжатие, необходимо ограничить
максимальные напряжения этого стержня некоторым значением, на-
называемым допускаемым напряжением [а]. Его величина выбирается
на основе устанавливаемого заранее для данного материала опасного
значения напряжения с учетом коэффициента запаса. Для материа-
материалов, неодинаково сопротивляющихся растяжению и сжатию, вводят
два разных допускаемых напряжения [ар] и [<гс].
> Задачи расчета на прочность. Таким образом, условие проч-
прочности в данном случае имеет вид
= М < [<т]
Пользуясь им, можно решать следующие задачи:
1. По заданным нагрузкам, размерам сечения и величине допус-
допускаемого напряжения проверять прочность стержня.
2. По заданным нагрузкам и известной величине допускаемого
напряжения определять размеры поперечного сечения:
А>
м
3. По заданным размерам сечения и известной величине допус-
допускаемого напряжения определять величину допускаемой продольной
силы:
N ^ [а]А.
Пример. Для чугунного стержня (рис. 8, а) с площадью сечения *А = 5 см2
проверить условия прочности при [ар] = 30 МПа, [ас] = 100 МПа.
Решение. На участке «а» стержень испытывает растягивающее усилие
Ni = 20 кН (см. рис. 8, г), поэтому нормальное напряжение в сечениях на этом
участке ах = N1/A = 40 МПа.
На участке «Ь», испытывающем сжатие, N2 = —40 кН. Соответствующее
напряжение <г2 = \N2\/A = 80 МПа.
Так как допускаемые напряжения на растяжение и сжатие для чугуна различ-
различны, необходимо проверить два условия с^ ^ [<7Р] и а2 ^ \°с\- Первое оказывается
невыполненным, поэтому условие прочности в целом не соблюдено.
366
Кручение
4. Кручение
4.1. Крутящий момент
г)
Рис. 10.
Кручением называется такой вид деформации стержня, при ко-
котором в его поперечных сечениях возникает только крутящий мо-
момент Mz1 а все остальные внутренние силовые факторы равны нулю.
Правило знаков: если при взгляде со стороны внешней нормали к
сечению крутящий момент направлен против хода часовой стрелки,
он считается положительным.
Пример. Рассмотрим стержень, нагру-
нагруженный двумя моментами тп1 и т2, плоско-
плоскости действия которых перпендикулярны оси
стержня (рис. 10, а). В соответствии с мето-
методом сечений проведем произвольное попереч-
поперечное сечение / на участке «а» и рассмотрим рав-
равновесие свободной отсеченной части стержня
(рис. 10, б). Действие отброшенной части за-
заменим неизвестным крутящим моментом Mzl,
выбрав его направление положительным. Из
уравнения равновесия для отсеченной части в
форме равенства нулю суммы моментов всех
сил относительно оси z: Mzl — mx = 0 следует
Mzl =m,j =30 кНм. Аналогично для сечения //
будем иметь (рис. 10, б) Mz2 -f fn2 — mx =0,
откуда Mz2 = ml — m2 = —10 кНм.
На рис. 10, г дана эпюра крутящего момента, показывающая характер изме-
изменения величины Mz вдоль оси стержня. На границе участков «а» и «Ь» стержня
крутящий момент претерпевает скачок на величину, равную моменту тп2.
4.2. Напряжения и деформации при кручении
> Напряженное состояние при
кручении. Ограничимся рассмотре-
рассмотрением стержней с поперечным сечени-
сечением в форме круга или кольца.
Для установления закона рас-
^ пределения напряжений по сечению
примем допущение, подтверждаемое
опытом, о том, что при кручении
поперечные сечения стержня в ре-
результате деформации поворачивают-
поворачиваются вокруг продольной оси как жест-
жесткие диски (кольца). Условия приме-
применимости этого допущения аналогич-
аналогичны условиям применимости гипотезы
плоских сечений при растяжении или сжатии (см. разд. 3.2).
Рассмотрим стержень, испытывающий кручение под действием
двух моментов, приложенных на его концах (рис. 11, а). Разобьем
m
А
6
dz
11-
4.2. Напряжения и деформации при кручении
367
его на соосные трубки (рис. 11, б) и выделим одну с внутренним ра-
радиусом р и бесконечно малой толщиной dp (рис. 11, в).
В силу принятого допущения относительно характера деформи-
деформирования стержня можно утверждать, что бесконечно малый элемент
ACBD, выделенный из трубки (рис. 11, в), испытывает деформацию,
соответствующую чистому сдвигу (см. разд. 2.3). Отсюда следует,
что по боковым граням элемента действуют только касательные на-
напряжения г (см. рис. 6, а).
р> Полярный момент инерции. Угол сдвига элемента 7 —
— BB'/dz = pdip/dz (рис. 11, в), где d<p/dz — погонный угол закручи-
закручивания трубки или угол закручивания на единицу длины. Из форму-
формулы C) гл. 2 (закон Гука) следует
JfL
A)
Величина погонного угла закручивания dip/dz
одинакова для всех соосных трубок, из которых
составлен стержень. Поэтому из формулы A) вы-
вытекает, что касательные напряжения в попереч-
поперечных сечениях стержня прямо пропорциональны
расстоянию р до его оси (рис. 12).
Крутящий момент Mz может быть получен суммированием мо-
моментов всех распределенных по сечению напряжений относительно
оси z\
Mz = / rpdA — G/p-7-, где /р = / f? dA. B)
A A
Интеграл по поверхности сечения /р называется полярным момен-
моментом инерции сечения и представляет собой геометрическую харак-
характеристику этого сечения.
Для круга диаметра D имеем /р = -gjD4.
Для кольца /р = 37(-D4 — с/4), где d и D — внутренний и внешний
диаметры соответственно.
> Касательные
3Уя B), находим
напряжения. Угол закручивания. Исполь-
d(p
~dz~
GL
C)
Подставляя это выражение в A) для г, получим основную форму-
ЛУ для касательных напряжений в поперечных сечениях стержня при
кручении
Т_
D)
368 Кручение
Угол закручивания всего стержня на рис. 11, а, т.е. угол взаимно-
взаимного поворота его крайних сечений, можно найти, зная погонный угол
закручивания C) и учитывая постоянство величины Mz вдоль оси
стержня (Mz = m):
f d<p Mzl
Jo dz G/p '
где / — длина стержня.
Величина G/p называется жесткостью сечения при кручении.
4.3. Расчеты на прочность при кручении
Значение наибольшего касательного напряжения при кручении
находится из формулы D) при р = ртах:
г _ 1М>тах _ \Мг\ ,.ч
г J "TFT" V>)
гтах - J - TFT' V>)
Р КР
Величина Wp = /p//>max называется полярным моментом сопро-
сопротивления сечения.
Для круга Wp = -f^D3.
Для кольца Wp = -jjD3(l - dA/DA).
Условие прочности сводится к неравенству rmax = |М2|/РУр ^ [г],
где [г] — допускаемое напряжение при кручении.
Как и при расчете на прочность при растяжении и сжатии, воз-
возможны следующие три вида задач, различающихся формой использо-
использования условия прочности.
1. Проверочный расчет: |М2|/РУр ^ [г].
2. Подбор сечения: Wp ^ |Mj/[r].
3. Определение допускаемой нагрузки: \М2\ ^ [т"]^р.
Пример. Для стального стержня кругового сечения (рис. 10, а) подобрать
диаметр из условия прочности при [т] = 100 МПа.
Решение. Так как поперечное сечение постоянно вдоль стержня, опасными
будут сечения на участке «а», где возникает максимальный крутящий момент
Mz = 30 кНм (см. рис. 10, г).
Из условия прочности
находим D ^ ^/l6Mz/Gr[r]) = 0,119 м.
Округляя в большую сторону, выбираем окончательно D = 12 см.
5.1. Изгибающий момент и поперечная сила 369
5. Прямой изгиб
5.1. Изгибающий момент и поперечная сила
р> Определения. Изгибом называется такой вид деформации стер-
стержня, при котором в его поперечных сечениях возникают изгибаю-
изгибающие моменты Мх и Му и, быть может, поперечные силы Qx и Qy, a
остальные внутренние силовые факторы (N и Mz) равны нулю.
В случае равенства нулю поперечных сил изгиб называют чи-
чистым, а при наличии поперечных сил имеем так называемый попе-
поперечный изгиб.
Будем рассматривать стержни, поперечные сечения которых име-
имеют ось симметрии у. Если на такой стержень действует система
внешних сил, лежащих в плоскости yz
и направленных перпендикулярно про-
продольной оси стержня (рис. 13), то в его
поперечных сечениях возникнут только
два внутренних силовых фактора — из-
изгибающий момент Мх и поперечная си-
сила Qy. Такой изгиб называют прямым ~z
(о косом изгибе смотри разд. 6.1).
Правило знаков: изгибающий мо- Рис 13
мент считается положительным, если
он приводит к растяжению нижних волокон и сжатию верхних; по-
поперечная сила положительна, если при воздействии на сечение справа
она направлена вниз, а при воздействии слева — вверх.
Как уже отмечалось, внутренние силовые факторы стержня зави-
зависят от продольной координаты рассматриваемого сечения, т.е. явля-
является функциями переменной z.
*> Дифференциальные уравнения равновесия стержня. Рас-
; мотрим стержень, на который действует распределенная вдоль его
оси нагрузка q (рис. 14, а). Выделим двумя сечениями бесконечно
малый элемент (рис. 14, 5), действие отброшенных частей стержня
заменим соответствующими внутренними усилиями, направления ко-
которых выбраны положительными.
Вычисляя сумму проекций всех сил на ось у и сумму моментов
сил относительно точки О, составим соответствующие уравнения
равновесия элемента
Из них следуют соотношения
dQV
13 А. Д. Полянин, В. Д. Полянин и др.
370
Прямой изгиб
Рис. 14.
7
l
/Г
L, -г
/77
/7?
Рис. 15.
называемые дифференциальными уравнениями равновесия стержня
при изгибе. Уравнения A), которым должны удовлетворять функции-
Qy(z) и Mx(z), часто используют при построении эпюр изгибающих
моментов и поперечных сил, а также при проверке этого построения.
Стержни, работающие преимущественно на изгиб, принято назы-
называть балками.
> Примеры построения эпюр. Рассмотрим примеры построения
эпюр Qy(z) и Mx(z) для некоторых балок с использованием метода
сечений.
На рис. 15, а показана консольная, т.е. с защемленным концом, балка, нагру-
нагруженная сосредоточенной силой. В соответствии с методом сечений проведем про-
произвольное поперечное сечение К, отстоящее на расстояние z от свободного конца
балки, и рассмотрим равновесие свободной отсеченной части. Действие отбро-
отброшенной части заменим неизвестными усилиями Qy и Мх, считая их направления
положительными. Вычисляя сумму проекций всех сил на ось у и сумму моментов
сил относительно точки А", составим соответствующие уравнения равновесия
- F = О, -МХ - Fz = О,
5.1. Изгибающий момент и поперечная сила
371
Г Р А
\F
111Ц1Ю11111
2
iiiiiiemin
С
я
Ь> ql\B ф
\ 1 2 \ z~2
1™ПТТТгг»»-1
6)
Рис. 16.
1С *
в*
ъ
f
inn
¦гТГГ
./77
щи
лПТ
т
и
1
1
1
1
/77 JJJ&
III
/771
Hill
)
L
I
откуда получим Qy = F, M^ = —Fz. Таким образом, поперечная сила постоянна, а
изгибающий момент изменяется прямо пропорционально расстоянию z, принимая
значения 0 и — FI соответственно на свободном (z = 0) и защемленном (z = /)
концах балки. На рис. 15, а даны соответствующие эпюры Qy и Мх.
Та же процедура для балки, нагруженной равномерно распределенной нагруз-
нагрузкой (рис. 15, б"), дает
-д* - Qy = 0, \qz2 + Мх = 0,
откуда Qy = —qz, Mx — —-^qz^. В данном случае поперечная сила есть линейная
функция z, а изгибающий момент зависит от z по закону квадратной параболы,
чему соответствуют эпюры Qy и Мх на рис. 1Ъ, б.
Аналогично для консольной балки, нагруженной моментом (рис. 15, в),
получим Qy = 0, Мх = т.
Для двухопорных балок (рис. 16), у которых нет свободных концов, необхо-
необходимо предварительно найти опорные реакции из условий равновесия для балки в
целом. После этого можно приступить к определению внутренних усилий анало-
аналогично предыдущему.
Для произвольного сечения на участке АВ балки, нагруженной в центре
(АВ = ВС = 1/2) сосредоточенной силой F (рис. 16, а), получим: Qy^Rx-=. F/2,
Мх = R^z = Fz/2, где z — расстояние от левого конца А. Для сечения на
участке ВС находим: Qy = R1-F= -F/2, Mx = Rxz - F(z - 1/2) = F(l - z)/2.
Соответствующие эпюры даны снизу на рис. 16, а.
Для балки на рис. 16, б: Qy = R1-qz = q(l/2-z), Mx = R1z-qz2/2 = qz(l-z)/2.
Для середины балки имеем Мх = д/2/8.
Для участка АВ балки на рис. 16, в: Qy = R1 = m/l, Mx = R1z = mz/l} а для
Участка ВС: QyzzRx= m//, Mx = Rxz - m = m(z/l - 1).
> Особенности эпюр Мх и Qy. Кратко сформулируем каче-
качественные особенности эпюр, вытекающие из соотношений A).
1. На участке балки, свободном от нагрузки (q = 0), величина Qy
постоянна, а Мх —линейная функция z.
2. На участке равномерно распределенной нагрузки (q = const),
Qy—линейная функция, а Мх —квадратичная (см. рис. 15, б, 16, б).
3. В точках приложения сосредоточенной силы величина Qy пре-
претерпевает скачок на величину этой силы, а эпюра Мх имеет излом
(рис. 16, а).
372
Прямой изгиб
Рис. 17.
4. В точках приложения сосредоточенного момента величина Мх
претерпевает скачок на величину этого момента (рис. 16, в).
В точках экстремумов функции Мх величина Qy = 0 (рис. 16, б).
Знание качественных особенностей эпюр позволяет строить эпю-
эпюры, не находя функциональных зависимостей Qy(z) и Mx(z), а вычи-
вычисляя значения Qy и Мх только на границах характерных участков.
Экстремальные значения Мх определяются после нахождения точек
экстремума из условий Qy = 0.
5.2. Напряжения и деформации при прямом
чистом изгибе
> Гипотезы чистого изгиба. Рассмотрим стержень в состоянии
чистого изгиба (рис. 17). В его поперечных сечениях возникает
единственный, отличный от нуля силовой фактор — постоянный
изгибающий момент Мх = га.
Будем использовать гипотезу* плоских сечений: плоские до де-
деформации поперечные сечения стержня остаются после деформации
плоскими и перпендикулярными деформированной продольной оси.
В соответствии с этой гипотезой два близких сечения поворачи-
поворачиваются относительно друг друга на угол d<p (рис. 17, б). В результа-
результате такой деформации возникает нейтральный слой, продольные во-
волокна которого О — О не изменяют своей длины. В нижней части
сечения продольные волокна удлиняются (а в верхней — укорачива-
укорачиваются) на величину Д = —у dip. Продольная деформация волокна равна
Аналогичная гипотеза использовалась в разд. 3.2.
5.2. Напряжения и деформации при прямом чистом изгибе
373
? = A/dz = —yd(pf(pd(p) = —y/p, где p — радиус кривизны нейтраль-
нейтрального слоя.
Дополнительно к гипотезе плоских сечений предположим, что
продольные волокна стержня не давят друг на друга. Отсюда следует,
что они находятся в состоянии одноосного растяжения или сжатия
(см. рис. 5).
^ Кривизна оси. Формула для нор-
нормальных напряжений. В соответ-
соответствии с законом Гука имеем
Р Рис. 18.
Отсюда следует, что нормальные напряжения а в поперечном сече-
сечении стержня изменяются прямо пропорционально расстоянию у от
нейтрального слоя (рис. 18).
Используя формулы A) гл. 1 и равенство нулю продольной силы,
получим
- / Е f
~ J а ~ р J y
А А
rx = -JaydA=jjy2dA.
A A
Из первого равенства вытекает, что нейтральная ось х попереч-
поперечного сечения проходит через центр тяжести, следовательно, величи-
величина р есть радиус кривизны изогнутой оси стержня. Из второго ра-
равенства выводим формулу, определяющую кривизну оси,
1 Мх [ 2
Р EIx J
C)
Величина 1Х называется моментом инерции сечения относитель-
относительно оси х (см. часть «Теоретическая механика», разд. 5.1), а произве-
произведение Е1Х — жесткостью сечения при изгибе.
Из B), C) получим основную фор-
формулу для нормальных напряжений
стержня при прямом изгибе
Мху
с = — ¦
D)
Рис. 19.
в которой знак «минус» необходим для согласования правила знаков
величин а и Мх. При Мх > 0 (рис. 19) верхние волокна сжимаются
(У > О,сг < 0), нижние растягиваются (у < 0,<г > 0); при Мх < 0
знаки напряжений в верхней и нижней частях сечения меняются на
противоположные.
374
Прямой изгиб
5.3. Напряжения и деформации при прямом
поперечном изгибе
> Касательные напряжения. Формула Журавского. При пря-
прямом поперечном изгибе в сечениях стержня возникает не Только из-
изгибающий момент Мх) но и поперечная сила Qy) связанная с каса-
касательными напряжениями в сечении формулой
Qy = J rydA.
A
Несмотря на наличие касательных напряжений, формулы C), D),
полученные для чистого изгиба, применимы и в этом случае.
Для определения касательных напряжений рассмотрим балку на
рис. 20, а. Вырежем из нее двумя близкими поперечными сечения-
сечениями и одним продольным малый элемент (рис. 20, б). По его боковым
граням действуют нормальные напряжения, вычисляемые по форму-
формуле D). Так как изгибающий момент справа больше, чем слева, на ве-
величину dMx) то и нормальное напряжение справа больше на величину
da = dMxy/Ix.
*)
отс
*)
Рис. 20.
Для того чтобы элемент оставался в равновесии, к его ниж-
нижней грани должны быть приложены касательные напряжения т
(рис. 20, б).
Примем допущение об их равномерном распределении по ширине
поперечного сечения. Тогда из условия равновесия элемента в форме
равенства нулю суммы проекций всех сил на ось z:
rbdz
-J
5.4. Расчет на прочность при прямом изгибе
375
где интеграл распространен на отсеченную часть поперечного сече-
сечения стержня, следует
т =•>
/ dadA J
лотс __ X лотс
bdz
dz
Учитывая второе уравнение A), для касательных напряжений
получим формулу Журавского:
' = j b > где 5°тс= J ydA.
E)
Величина 5?тс называется статическим моментом отсеченной
части поперечного сечения относительно оси х.
На основании закона парности касательных напряжений (см.
разд. 2.1) формула E) определяет также касательные напряжения в
поперечном сечении стержня (рис. 20, б).
^ Сечение прямоугольной формы. В частном случае сечения
прямоугольной формы (рис. 21) имеем
Подставляя эти выражения в формулу E), находим
Т =
Видно, что величина г меняется
по высоте сечения по закону квадрат-
ной параболы, достигая максимально-
максимального значения при у = 0 (т.е. на оси х):
Ж
70TC
к.
_ Qy
Tmax " 2bh '
(б)
Рис. 21.
На рис. 21 показана эпюра касательных напряжений по высоте
прямоугольного сечения.
5.4. Расчет на прочность при прямом изгибе
> Максимальные напряжения. Из формулы D) следует, что наи-
наибольшие по модулю нормальные напряжения достигаются в точках
сечения, наиболее удаленных от нейтральной оси х) при |у| = t/max:
где И^х = -^
2/max
G)
376 Прямой изгиб
Величина Wx называется моментом сопротивления сечения при
изгибе (осевым моментом сопротивления).
Для сечения прямоугольной формы (рис. 21)
bh2
Сопоставим величины <ттах и гтах для балки прямоугольного се-
сечения. По порядку величины Q ~ F и Мх ~ F/, где F — действующая
на балку характерная сила, а / — длина балки. Тогда из F), (8) полу-
получим
Таким образом, касательные напряжения малы по сравнению с нор-
нормальными. Этот вывод справедлив и для стержней других форм по-
поперечного сечения (исключение составляют тонкостенные стержни,
когда возможно появление больших касательных напряжений).
> Условия прочности балок. Как правило, расчет на прочность
для балок проводят по нормальным напряжениям с использованием
условия прочности в форме
Если же материал стержня (например, дерево) плохо сопротивля-
сопротивляется сдвиговым деформациям (срезу), то необходим расчет и по ка-
касательным напряжениям:
r
/ ?отс \
( "~ir/
\ Ь /
В случаях, когда материал, из которого изготовлен стержень,
имеет различные допускаемые напряжения при растяжении [<тр] и
сжатии [сгс], расчет на прочность проводят отдельно по растягиваю-
растягивающим и сжимающим напряжениям:
пс _ l^bmax ^ Г/Гс1
^тах"- 7 ^ [^ U
гДе 2/тах и 2/тах — расстояния от оси х до наиболее удаленных от
этой оси точек растянутой и сжатой частей поперечного сечения
соответственно.
Как и при растяжении — сжатии или кручении, при расчете на
прочность стержней, работающих на изгиб, решается какая-либо из
трех задач:
6.1. Косой изгиб 377
1) проверочный расчет,
2) подбор сечения,
3) определение допускаемой нагрузки.
Все необходимые для расчета на прочность геометрические ха-
характеристики прокатных сечений (двутавр, швеллер и т.п.) приво-
приводятся в специальных таблицах, называемых сортаментом прокатной
стали.
Пример. Для стальной двутавровой балки (№ 55) длиной I = 3,2 м (см.
рис. 16, б) из условия прочности определить допускаемую нагрузку [q] при
[а] = 160 МПа.
Решение. Опасным для рассматриваемой балки будет сечение в середине
пролета, где возникнет максимальный изгибающий момент Мх = ql2/8.
В сортаменте прокатной стали находим для двутавра момент сопротивления
Ws = 2000 см3.
Из условия прочности
м* я'2 - ы
следует q ^ 8Wx[<r]/l2 = 250 Н/м. Таким образом, [q] = 250 кН/м.
6. Сложное сопротивление
Сложным сопротивлением называются виды деформаций стерж-
стержня, при которых в его поперечных сечениях одновременно возника-
возникает не менее двух отличных от нуля внутренних силовых факторов.
Исключением является прямой поперечный изгиб, который рассма-
рассматривается как простой вид деформации, несмотря на возникающие
при этом два силовых фактора — изгибающий момент и поперечную
силу, так как в подавляющем большинстве случаев расчеты на проч-
прочность и жесткость ведутся без учета влияния поперечных сил, т.е. по
одному силовому фактору — изгибающему моменту.
6.1. Косой изгиб
> Определение. При рассмотрении прямого поперечного изгиба
предполагалось, что поперечное сечение симметрично относительно
оси у. Оказывается, все результаты главы 5 справедливы и для се-
сечения произвольной формы, если оси х и у являются главными цен-
центральными осями инерции^ т.е. взаимно перпендикулярными осями,
проходящими через центр тяжести сечения, для которых осевые мо-
моменты инерции принимают экстремальные значения. В дальнейшем
в качестве осей х и у будут выбираться главные центральные оси.
Косым изгибом называется общий случай изгиба стержня (см.
Разд. 5.1), при котором в поперечном сечении возникают два изгиба-
*°Щих момента Мх и Му и, быть может, поперечные силы Qx) Qy,
378
Сложное сопротивление
i
р
h
X
f
Рис. 22.
Пользуясь принципом независимости действия сил, можно опре-
определить нормальные напряжения в любой точке поперечного сечения
с координатами х, у по формуле
Мху М х
(Т = — -
A)
которая является следствием формулы D) гл. 5.
^ Нейтральная ось при косом изгибе. 1^ак и при прямом
изгибе, в сечении существует нейтральная ось, в точках которой
напряжения равны нулю. Ее уравнение
Л^Г у М х
Перечислим некоторые свойства нейтральной оси при косом
изгибе.
1. Нейтральная ось проходит через центр тяжести сечения.
2. Нейтральная ось делит сечение на две части: в одной а > О, в
другой <т < 0.
3. Нормальные напряжения в сечении изменяются прямо пропор-
пропорционально расстоянию от нейтральной оси, достигая максимальных
значений (по модулю) в наиболее удаленных от нейтральной оси точ-
точках сечения.
Касательные напряжения в поперечном сечении (рис. 22) могут
быть определены по формуле E) гл. 5:
т„ =
Как и при прямом поперечном изгибе, касательные напряжения,
как правило, играют второстепенную роль, поэтому условия прочно-
прочности накладывают ограничения на максимальные нормальные напря-
напряжения.
6.2. ВНЕЦЕНТРЕННОЕ РАСТЯЖЕНИЕ ИЛИ СЖАТИЕ
379
а)
б)
б)
г)
д)
У>
1
У
'/>
i i i #
5
"BIIIHITT1
^«¦0кН/м
ГТГ111 [ 111111111 ¦ ^-
Рис. 23.
2
F
У
1
h\
\
l
ш х
ь
+. /^Ьк <5,МПа
z
г
Нм
8
Л
с
X
Рис. 24.
Пример. Вычислить максимальные нормальные напряжения в опасном сече-
сечении балки (рис. 23), испытывающей косой изгиб. Форма сечения — прямоуголь-
прямоугольная, Ь = 6 см, h = 12 см.
Решение. На рис. 23, б, г показаны схемы нагружения балки в вертикальной
и горизонтальной плоскостях, а на рис. 23, в, д — соответствующие эпюры
изгибающих моментов Мх, М„. Судя по эпюрам, опасным сечением является
заделка, где Мх = -20 кНм, Му = 5 кНм.
Для прямоугольного сечения Ix = bh3/12, Iy = hb3/12, и уравнение нейтральной
оси B) для опасного сечения принимает вид — у + х = 0.
Из расположения нейтральной линии (рис. 24) видно, что самыми опасными
точками сечения являются точки В и С, как наиболее удаленные от нейтральной
оси. Подставляя их координаты в A), вычислим напряжения в этих точках
= 208 МПа,
= -208 МПа.
На рис. 24 изображена эпюра а, характеризующая изменение нормальных
напряжений в направлении, перпендикулярном нейтральной оси.
6.2. Внецентренное растяжение или сжатие
> Внецентренным растяжением или сжатием называется та-
такой вид деформации стержня, при котором в его поперечном сече-
сечении возникают продольная сила JV и изгибающие моменты Мя, Му
(и, быть может, поперечные силы Qx) Qy).
Продольная сила и изгибающие моменты могут рассматриваться
как результат воздействия на стержень внецентренно приложенной
силы F = N (рис. 25). Именно поэтому такой вид сложного сопроти-
сопротивления называют внецентренным растяжением или сжатием.
380
Сложное сопротивление
Изгибающие моменты связаны с координатами точки приложе-
приложения силы F соотношениями Мх = -FyF)
Му = —FxF. Поэтому из A), формулы A)
гл. 3 и принципа независимости действия
сил для нормальных напряжений в произ-
произвольной точке любого поперечного сече-
сечения с координатами х) у получим
Рис. 25.
а =
IL
А
Мху Мух
¦'(т + ?+ff> <3>
^ Нейтральная ось при внецентренном растяжении или
сжатии. Уравнение нейтральной оси поперечного сечения, в точках
которой напряжения равны нулю, имеет в данном случае вид
IE» + iff. = 0.
D)
Нетрудно видеть, что нейтральная ось не проходит через центр
тяжести сечения. Остальные свойства такие же, как и при косом
изгибе. Дополнительно укажем еще одно свойство нейтральной оси
при внецентренном растяжении или сжатии: нейтральная ось не
пересекает той четверти сечения, в которой приложена сила F.
> Ядро сечения. Положение нейтральной оси, как видно из уравне-
уравнения D), зависит от координат точки приложения силы F. Если точка
приложения силы F располагается достаточно близко к центру тяже-
тяжести сечения, в области, которая называется ядром сечения, то ней-
нейтральная ось проходит за пределами поперечного сечения, т.е. все
точки сечения испытывают нормальные напряжения одного знака.
На рис. 26 показаны ядра для прямоугольного и кругового сечений.
Условия прочности при внецентренном растяжении или сжатии
имеют вид ограничений на максимальные нормальные напряжения.
Пример. Вычислить максимальные нормальные напряжения в поперечном
сечении внецентренно сжатого стержня прямоугольного сечения при 6 = 6 см,
h = 12 см (рис. 27). Точка К приложения силы F = 144 кН имеет координаты
xF = — 1 см, ур = 6 см (рис. 27, б).
Решение. Вычислим геометрические характеристики сечения:
A = bh = 72см2,
Ix = bh3/l2 = 864 см4,
1у =
= 216 см4.
Уравнение нейтральной оси D) принимает вид 1 + у/2 — х/3 = 0. Из ее
расположения (рис. 27, 6) видно, что В и С — наиболее напряженные точки
6.3. Изгиб о кручением
381
У\
Рис. 26.
Рис. 27.
сечения. Подставляя в C) их координаты, находим напряжения этих точках
(силу F следует взять со знаком «минус», так как ее направление противоположно
показанному на рис. 25):
= -100 МПа,
= 60 МПа.
На рис. 27, б" построена эпюра <т, показывающая закон распределения нор-
нормальных напряжений в направлении, перпендикулярном нейтральной оси.
6.3. Изгиб с кручением
> Изгибом с кручением называется такой вид деформации стер-
стержня, при котором в его поперечных сечениях возникает крутящий
момент М2, изгибающие моменты Мх, Му и, быть может, попереч-
поперечные силы Qxi Qy.
Будем рассматривать стержни кругового сечения. Ввиду его
симметрии, любые две взаимно перпендикулярные центральные оси
сечения являются главными. Поэтому их всегда можно выбрать
так, чтобы в рассматриваемом сечении суммарный изгибающий
момент имел только одну составляющую,
например Мх.
Наибольшие по модулю нормальные
напряжения в сечении определяются по
формуле G) гл. 5 для прямого изгиба
„ -Ш
более
E)
Достигаются в точках Б и С, наи-
удаленных от нейтральной оси х
Рис. 28.
(Рис. 28).
По формуле E) гл. 4 находим наибольшие касательные напряже-
напряжения при кручении
\мг\ (б)
382
УСТОЙЧИВОСТЬ СЖАТЫХ СТЕРЖНЕЙ
Они возникают в точках границы сечения, в том числе и в точках
В и С.
Таким образом, точки В и С наиболее опасны. В их окрестности
реализуется плоское напряженное состояние, являющееся комбинаци-
комбинацией одноосного растяжения (или сжатия) и чистого сдвига.
^ Условия прочности Сен-Венана и Мизеса. В отличие от
всех видов деформаций, рассмотренных ранее, в данном случае мо-
могут быть существенны как сг, так и г, поэтому возникает вопрос об
условии прочности для такого вида напряженного состояния. Суще-
Существуют различные теории прочности, отвечающие на этот вопрос.
Чаще всего применяют условия прочности Сен-Венана
или Мизеса
Используя соотношение между моментами сопротивления
а также учитывая, что при произвольной ориентации осей х и у в
формуле E) величину Мх следует заменить на суммарный изгибаю-
изгибающий момент Ми = * II
чательн
дующему окончате
Ь М^, условия прочности приводятся к сле-
ьному виду:
+ мi + м 2
W,
М2 + 0,75М2
(Сен-Венан),
[с] (Мизес),
где Wx = тг1K/32 — осевой момент сопротивления для круга диа-
диаметра D.
Пример. Из условия прочности Мизеса по-
подобрать диаметр стального вала, испытываю-
испытывающего изгиб с кручением (рис. 29). Допускаемое
напряжение [<т] = 150 МПа.
Решение. Схема нагружения вала в вер-
вертикальной плоскости и соответствующая эпюра
изгибающего момента Мх даны на рис. 29, 5", в.
Схема нагружения вала внешним моментом
и эпюра возникающих крутящих моментов Mz
показаны на рис. 29, г, д.
Наиболее опасно сечение в заделке, где
возникают максимальный изгибающий Мх =
= 13 кНм и крутящий Mz = 6 кНм моменты.
Из условия прочности
г)бгтттппа
Рис. 29.
находим: ?) ^ 0,098 м. Таким образом, можем
принять D = 10 см.
7.2. Формула Эйлера
383
7. Устойчивость сжатых стержней
7.1. Критическая сила
В разд. 1.1 уже отмечалось, что некоторые состояния равнове-
равновесия тел или систем оказываются неустойчивыми, т.е. такими, при
которых незначительные механические воздействия могут привести
к существенным отклонениям от этих состояний. Каждое из этих со-
состояний равновесия характеризуется опре-
определенным значением нагрузки, отделяющим
области устойчивого и неустойчивого рав-
равновесия.
Применительно к сжатому стержню
(рис. 30) оказывается, что при величине
сжимающей силы F, не превышающей неко-
некоторого значения, называемого критической
силой F' прямолинейная форма равнове-
V//////
Рис. 30.
сия стержня устойчива. Если же F > FKp,
то прямолинейная форма равновесия неустойчива, и стержень стре-
стремится принять иную, устойчивую форму равновесия с криволинейной
осью.
Сжимающие напряжения <гкр = FKp/A, соответствующие крити-
критической силе, называются критическими напряжениями.
7.2. Формула Эйлера
Таким образом, при F > FKp решение задачи о равновесии стерж-
стержня неединственно. Анализ условий этой неединственности позволяет
получить формулу для величины FKp.
Рассмотрим шарнирно опертый цен-
центрально сжатый стержень в слегка изо-
изогнутом состоянии (рис. 31). Изгибающий
момент в поперечном сечении стержня р
равен М = — Fv, где прогиб v(z) задает
криволинейную ось стержня. Кривизна к изогнутой оси при малых
прогибах стержня (v/l < 1, v' < 1) равна
*=! =
Р
<12У
dz*
При анализе деформации изгиба была получена формула C) гл. 5,
связывающая кривизну и изгибающий момент,
1 _ М
р ~ EV
384 УСТОЙЧИВОСТЬ СЖАТЫХ СТЕРЖНЕЙ
в которой согласованы правила знаков для кривизны к = 1/р и
момента М.
Отсюда приходим к дифференциальному уравнению изогнутой
оси стержня
</' = -Л, A)
где обозначено а2 = F/(EI).
Граничные условия учитывают закрепления концов стержня:
«@) = 1/@=0. B)
Уравнение A) при граничных условиях B) имеет очевидное три-
тривиальное решение v = 0, соответствующее прямолинейной форме рав-
равновесия. Нас интересуют ненулевые решения.
Общий интеграл уравнения A) имеет вид
v = Сг sin(az) + С2 cos(az).
Из первого граничного условия следует, что С2 = 0, а из второго —
С\ sin(aZ) = 0. Сокращая на С1 ф 0, приходим к равенству
sin(aZ) = 0,
которое будет выполнено, если al = тгп или
(„-1.J....J. C)
Таким образом, установлено, что если величина сжимающей си-
силы F принимает дискретные значения, даваемые формулой C), то
наряду с прямолинейным возможны искривленные состояния равно-
равновесия стержня, имеющие форму синусоиды
Из C) при п = 1 получаем формулу Эйлера для критической силы
Более точная теория показывает, что неоднозначность форм
равновесия имеет место при всех силах F) превышающих эйлерову
силу D).
7.4. Пределы применимости формулы Эйлера
385
7.3. Влияние способов закрепления концов
стержня на величину критической силы
Можно рассмотреть аналогичные задачи для других случаев за-
закрепления концов стержня (рис. 32). Их решение показывает, что кри-
критическую силу можно определять по формуле, подобной D):
F =—, E)
введя понятие приведенной длины ptl и коэффициента приведенной
длины //.
Величину /iZ можно истолковать как часть длины стержня, на
которой укладывается полуволна синусоиды, соответствующей его
искривленной оси. Значения коэффициента /z для некоторых случаев
закрепления стержня даны на рис. 32.
Рис. 32.
Пример. Найти критическую силу для стального стержня длиной 1 = 4м
(рис. 32), жестко заделанного одним концом. Сечение стержня— двутавр № 22.
Решение. По сортаменту находим для данного двутавра моменты инерции
1Х = 2550 см4, 1у = 157 см4. Естественно, что стержень теряет устойчивость в
плоскости наименьшей жесткости, поэтому следует выбрать наименьший момент
инерции /min = Iy = 157 см4.
Для заданного закрепления коэффициент /х = 2, модуль упругости стали
Е = 210 ГПа. По формуле Эйлера E) получим FKp = ™in =
= 50,8 кН.
7.4. Пределы- применимости формулы
Эйлера
Критические напряжения, соответствующие критической си-
силе E), равны
FK» тг2Е
% = \JTfA —
радиус инерции сечения.
386
УСТОЙЧИВОСТЬ СЖАТЫХ СТЕРЖНЕЙ
Введем обозначение А = /iZ/г. Тогда предыдущая формула прини-
принимает вид
(в)
Величина А называется гибкостью стержня.
Из F) следует, что с уменьшением гибкости значение <ткр неогра-
неограниченно возрастает. Ясно, что формулой F) нельзя пользоваться при
слишком больших напряжениях, так как материал стержня в этих
условиях не подчиняется закону Гука.
Величина наибольшего напряжения, при котором справедлив за-
закон Гука, называется пределом пропорциональности <тпц.
Таким образом, пределы применимо-
применимости формулы Эйлера устанавливаются
неравенством <ткр < <тпц или тг2Е/Х2 < <тпц.
В результате получим А > Ао = тг* /Е/<тПц.
Зависимость <ткр от А при А < Ао
находят экспериментальным путем. На
рис. 33 схематически сплошной лини-
линией показан полный график зависимости
<ткр(А). При очень малых гибкостях стер-
стержень при сжатии теряет прочность, поэтому критические напря-
напряжения практически равны соответствующим напряжениям потери
прочности.
7.5. Расчеты сжатых стержней
на устойчивость
На практике необходимо обеспечить устойчивую работу сжатых
стержней, поэтому напряжения в стержне не должны превосходить
критических с некоторым запасом:
71
G)
где п — коэффициент запаса.
Для удобства вводится коэффициент продольного изгиба
<р = ^кр/(пМ)- Тогда условие G) принимает вид
F
-J <[*]*. (8)
Зависимости <р(Х) для разных материалов приводятся* в справоч-
справочниках в виде таблиц.
Пользуясь условием (8), можно решать те же задачи, что и при
расчете на прочность (см. разд. 3.3).
Список литературы 387
Список литературы
Беляев Н. М. Сопротивление материалов. — М.: Наука, 1976. — 607 с.
Биргер И. А., Мавлютов Р. Р. Сопротивление материалов. — М.: Наука, 1986.—
560 с.
Гастее В. А. Краткий курс сопротивления материалов. — М.: Наука, 1977. —
456 с.
Дарков А. В., Шпиро Г. С. Сопротивление материалов. — М.: Высшая школа,
1989. —622 с.
Иосилевич Г. Б. и др. Прикладная механика. — М.: Машиностроение, 1985. —
575 с.
Кинасошвили P. G. Сопротивление материалов. — М.: Наука, 1976. — 607 с.
Работное Ю. Н. Механика деформируемого твердого тела. — М.: Наука, 1988.—
711с.
Сопротивление материалов. / Под ред. Писаренко Г.С. — Киев: Вища школа,
1986. —775 с.
Сопротивление материалов. / Под ред. Смирнова А.Ф. — М.: Высшая школа,
1975. —480 с.
Степин П. А. Сопротивление материалов.— М.: Высшая школа, 1988. — 366 с.
Терегулов И. Г. Сопротивление материалов и основы теории упругости и пла-
пластичности. — М.: Высшая школа, 1984. — 472 с.
Тимошенко С. П. Механика материалов. — М.: Мир, 1976. — 669 с.
Толоконников JI. А. Механика деформируемого твердого тела. — М.: Высылая
школа, 1979. — 318 с.
Феод о съев В. И. Сопротивление материалов.— М.: Наука, 1986.— 512 с.
ПРИЛОЖЕНИЯ
1. Элементарные функции и их
свойства
В приложении 1 обычно считается, что п — целое положитель-
положительное число (другие случаи специально оговариваются).
1.1. Тригонометрические функции
> Простейшие соотношения.
sin2 а: + cos2 х = 1, tga?ctga;=l,
sin(—х) = — sinx, cos(—x) = cosx,
sin x , cos x
tga? = , ctgx=-: ,
cos a: sin a:
tg(-x) =-tgx, ctg(-x) =-ctgx,
1 + tg2 x = —1—, 1 + ctg2 x = -r±r-.
cos2 x sin" x
> Соотношения между тригонометрическими функциями
одного аргумента.
sin х = ± у 1 — cos2 х = ±
cos а: = ±у 1 — sin2 х = ±
1 + tg2 х у/\ + ctg2 х '
1.1. Тригонометрические функции 389
Формулы приведения.
sin(x±n7r) = ( —l)nsinx, cos(a?±n7r) = (—l)ncosx,
=±(-l)ncosx,
сов(х±
\ 2
tg(x±n7r) = tgx, ctg(a?± птг) = ctga;,
2n+l
^\ . , / , 2n+i \
l=-ctga?, ctghri 7rJ=-tga:,
sin (x ± — J = —— (sin x ± cos x), cos f x ± — J = (cos x ^ sin x),
/ тг\ tgg±l . / , тг\ ctgx^l
tg \x± — = -2 , ctg(a?± — = — ¦ .
Формулы сложения.
sin(a? ± y) = sin a: cos у ± cos a: sin y, cos(a? ± y) = cos x cos у =f sin a: sin y,
i. / _i_ \ tga?±tgy l^tgxtgy
tg(x ± y) = —2 =—, ctg(a? ± y) = = .
6V У; lTtgxtgy' 6V У) tgxitgy
Суммы и разности тригонометрических функций.
(x-f_y\ / x — у \
J cos ( 1,
Л. (х-У\ (Х + У\
sin х - sin у = 2 sin ( —-— J cos ( —-— J ,
(x + y\ (x —y\
J cos ( J,
cos x — cos у = —2 sin ( ] sin ( J,
V 2 J \ 2 J
sin2 x — sin2 у = cos2 у — cos2 a; = sin(a: + y) sin(a? — y),
sin2 x — cos2 у = — cos(a: + 3/) cos(a? — y),
sin(a: ± y) sin(a; ± y)
tga?±tgy= * *S ctga:±ctgy = . v . ,
cos a: cos у sin a: sin у
a cos a: + b sin а: = г sin(a? + Ч>) = г cos(a? — -0),
где r = -\/a2 + 62, sin<p = a/r, cos^> = 6/r, sin^> = 6/r, cos
> Произведения тригонометрических функций.
sin а? sin у = ~- [cos(a; - у) - cos(a? + у)],
cos xcosy = ± [cos(a? - у) + cos(a? + у)],
sin а? cos у = у [sin(o: - у) + sin(a? + у)].
> Степени тригонометрических функций.
cos2a?= -|-cos2a:+ -J-, sin2 x = --i-cos2a?+ \,
cos3a?= -i-cos3a?-f -|-cosa;, sin3 a: = -~sin3a?+ -|-
-i-cos3a?-f -|-cosa;, sin3 a: = -~sin3a?+ -|-sina7,
-i-cos2a;+ ¦§-, sin4 x
cos x = -i. cos 5a: + —¦ cos За? + •§¦ cos x, sin5 x = -^- sin5ar - -^-sin3ar + -|-sinar,
390Элементарные функции и их свойства
"х = —2—- 5Z ^2n c°s[2(n - fc)x] + —^"CJn'
fc=O
cos2n+1 a? = -^- 5Z C2n+i cos[Bn - 2A: + l)a?],
1 n-i x
0 ^n cos[2(n - fc)a?] + ^2^С2п
:
где C^ = —- :— биномиальные коэффициенты @! = 1).
к\ (m — к)\
р. Тригонометрические функции кратных аргументов.
cos2а? = 2 cos2 а? - 1 = 1 - 2 sin2 a?, sin 2а? = 2 sinxcosar,
cos За? = — 3cosar + 4 cos3 ar, sin За? = 3 sin a? — 4 sin3 a?,
cos4a? = 1 — 8cos2 a? + 8 cos4 a?, sin 4a? = 4cosa?(sina? — 2 sin3 a?),
cos 5a? = 5 cos a? — 20 cos3 a? + 16 cos5 a?, sin 5a? = 5 sin a? — 20 sin3 a? + 16 sin5 a?,
cos[2(n + l)a?] = cosa? < 1 +
• /« ч « Г- A/ .4* (n2-l)(n2-22)...(n2-fc2) . 2haml 1
sinBna?) = 2ncosa?,sina?+ ? (-4) *-* A ; v i-em2** ,
sin[2(n + 1)«] = Bn + l)|sina? +
, ^( l)n(
j;)
4tga:-4tg3a:
> Тригонометрические формулы с половинными углами.
• 2 Х __ ^ ~ COS Х 2 Х _
2 2 ' 2 2
a? __ sina;^ _ 1 — cos a? a? _ sin a? _ 1 + cos a?
2 ¦ i+cosa? . sin a? ' *-" 2 , 1—cosa? sin a?
2tgf l-tg2f 2tgf
sina?= r-="i ллвг= *- ?tTrrt ^—
> Формулы Эйлера и Муавра, связь с гиперболическими
функциями.
еу+»« _ eV(CO8X -f.tsina?), (cosa? + tsina?)n = cos(na?) + tsin(na?), t2 = — 1,
sin(tx) = ishxj cos(ta?) = chx, tg(ta?) t= t'tha?, ctg(ta?) = —tctha?.
1.2. Гиперболические функции
391
1.2. Гиперболические функции
Определения.
shar = , char =
2 ? 2
Простейшие сЪотношения.
ch2ar-sh2ar = l,
sh(—ar) = — shar,
. shar
tha? = -—,
cha?
th(-ar) = -tha;,
tha: =
ex - e~x
cthar =
1 - th2 x =
ch2ar '
thar • cthar = 1,
ch(—ar) = char,
. char
cthar = —-,
shar
cth(—ar) = —cthar,
cth2ar-l = —i—¦
sh ar
^ Соотношения между гиперболическими функциями од-
одного аргумента.
thar
> Формулы сложения.
sh(ar db у) = sh ar ch у ± sh у ch ar, ch(ar ± y) = ch ar ch у ± sh ar sh y,
th(ar ± y) =
thar ± thy
cth(ar ± y) =
ctharcthy ± 1
1± thar thy' -"v—*/ cthy± cthar
> Суммы и разности гиперболических функций.
sh2 ar - sh2 у = ch2 ar - ch2 у = sh(ar + y) sh(ar - y),
sh2 ar + ch2 у = ch(ar + y) ch(ar — y),
ch a? ch у
sh ar sh у
392 Элементарные функции и их свойства
> Произведения гиперболических функций.
sharshy = y[ch(ar + у) — ch(ar — у)],
diarchy = -~[ch(a? + у) + ch(a? - у)],
sharchy = y[sh(a? + у) + sh(a? - у)].
> Степени гиперболических функций.
ch х = -г sh За: -f -
4
ch4 x = -g- ch 4ar + *
ch5 x = -rg- sh bx +
§-sha?,
i-ch2a?+f,
-^-sh3a; + 4-shar,
lo о
sh3a:
sh*x
sh?x
-f-sha?,
ch2n+1 x = -^- 53 C?n+1 ch[Bn - 2Л + 1)«],
1 n-1 (—Iin
«h2n+1 * = т^г Е (-l)*C2»+i sMBn - !
> Гиперболические функции кратных аргументов.
ch2ar = 2ch2ar - 1, sh2ar = 2sharchar,
ch3a: = -3cha? + 4ch3 x, sh3a: = 3sha: + 4sh3 x,
ch4a: = 1 - 8ch2 x + 8ch4 ж, sh4a: = 4cha:(sha: + 2sh3 a:),
ch5a: = 5cha; - 20ch3 x + 16ch5 x, sh5a: = 5sha: + 20sh3 x + 16sh5 a?.
n-i n n [n/21 (-1
2 Al
где C^ — биномиальные коэффициенты, [А] обозначает целую часть числа А.
> Связь с тригонометрическими функциями.
sh(tar) = tsinar, ch(tar) = cosar, th(tar) = itgar, cth(tar) = -tctgar, i2 = -1.
1.3. Обратные тригонометрические функции
> Простейшие соотношения. Главные значения обратных тригономе-
тригонометрических функций определяются неравенствами
- у $ arcsins $ ~, 0 $ arccosar $ тг, где -1 $ х ^ 1,
-~-< arctga? < -|-, 0 < arcctga? < тг, где -оо < х < +оо.
1.3. Обратные тригонометрические функции
393
arcsin(—ar) = — arcsin ar, arccos(—ar) = тг — arccos ar,
arctg(—х) = — arctgar, arcctg(-ar) = тг — arcctgar,
sin(arcsinar) = ar, cos(arccosor) = ar,
tg(arctgar) = ar, ctg(arcctgar) = x,
x - 2птг
при 2птг - ~ ^ x ^ 2mr 4- -~
при Bn + l)?r . ^ ^ x ^ 2(n
ar — 2птг при 2птг ^ x ^ Bn -f
-а?4-2(п+1)тг при B )^
arctg(tgar) = x - пж при П7г-у<аг<птг + у,
arcctg(ctgar) = ar — птг при птг < х < (п + 1)тг.
^ Соотношения между обратными тригонометрическими
функциями.
тг тг
arcsin х + arccos ar = —, arctg ar + arcctg x = —;
arcsin x = <
arccos v 1 — ar2
— arccos y/1 — x2
arctg .
arcctg
при 0 ^ х ^ 1,
при —1 ^ ar ^ О,
при -1 < х < 1,
— тг при — 1 ^ х < О;
arccos ar =
arcsin \/l - ar2
тг - arcsin %/l — x2
arctg
arctg ar = <
arcctg
arccos
arcctg —
arcctg ar =
тг — arcsin ¦
arctg —
x
it + arctg -
при 0 ^ ar ^ 1,
при —1 ^ x ^ 0,
при 0 < ar ^ 1,
при -1 < x < 1;
ar — любое,
при ar ^ О,
при х ^ 0,
при ar > 0.
при х > О,
при ar < О,
при х > О,
при аг < 0.
394 Элементарные функции и их свойства
> Суммы и разности обратных тригонометрических
функций.
arcsins + arcsiny = arcsin(a?\/l - у2 + yyl - х2 ) при х2 + у2 ^ 1-,
arccosx -f arccosy = arccos[ary — \JA — x2)(l — y2) J при х + у ^ 0,
arccosx - arccosy = - arccos[a?y 4- \/(l - x2)(l - у2)] при a? - у ^ 0,
s + У
arctg a: + arctgy s= arctg при xy < 1,
1 — a:y
a? — у
arctg a? - arctgy = arctg при xy > -1.
1 + я У
1.4. Обратные гиперболические функции
> Связь с логарифмической функцией, простейшие
соотношения.
Arsh ar = In (ar 4- Vx2 4-1)» Arch ar = ± In (ar 4- Vx2 — 1J,
Ai.i_ 1,14-s *i.i_ 1,14-a?
Arthar = — In , Arcthar = — In ;
2 1-ar 2 ar-1
Arsh(-ar) = -Arshar, Arch(-ar) = Archar,
Arth(—ar) = —Arthar, Arcth(—ar) = —Arcthar.
> Соотношения между обратными гиперболическими
функциями.
Arsh ar = Arch y/x2 4-1 = Arth . . ,
y/x2 4-1
Arch ar = Arsh \Jx2 — 1 = Arth ,
ar
ar 1 1
Arthar = Arsh = Arch ¦«• = Arcth —.
> Суммы и разности обратных гиперболических
функций.
Arsh ar ± Arsh у = Arsh \x\J\ 4- у2 ± у у 1 4- х2 ),
Arch ar ± Arch у = Arch [ary ± \/(аг2 - 1)(у2 - 1)],
Arshar ± Arch у = Arsh [ary ± ^/(ar2 4- 1)(у2 - 1)],
Arth ar ± Arth у = Arth ¦ "
Arthar ± Arcth у = Arth ¦
. ± ary '
ary±l
2.1. Интегралы, содержащие алгебраические функции
395
2. Таблица неопределенных
интегралов
2.1. Интегралы, содержащие
алгебраические функции
^ Интегралы, содержащие целые степени о + Ьх.*
1.
2.
3.
4 г х dx _ 1 П (a + bxj2 _2о(а + Ьж) + о21п|а + 6ж|1.
у а 4" ох О L 2 J
[ dx I , . а 4-6
/ —:? гт" = — 'п
J x(a 4- 6х) а х
5
6.
7.
8.
9.
10.
>
11.
12.
13.
14.
15.
16.
17.
а -f
da?
х(а 4- 6a;J а(а 4- Ьх) а2
1 I а 4- ba:
2 \
V scte _ 1 Г 1 а I
/ (а4-6хK " б2 [ а + Ьх + 2(a4-6xJJ*
Интегралы, содержащие а + х и Ь + х.
J (a 4- i
xdx
a-b
•In
64- х
а + х
, а ф 6. Для а = 6 ci&. интеграл 2, n = —2.
dx
-In
a + x
xdx
In I
/
/
(a4-x)F4-xJ (а-Ь)(Ь + х) (a-bJ \b + x
x2dx
62
(a-fx)F 4-xJ
dx
(a 4-хJ F 4-хJ
(a - of
62 - 2a6
F-aJ
(a-bJ \ a 4-х 6 4-х
a 4- x
64-x
Здесь и далее постоянная интегрирования С для краткости опускается.
396
Таблица неопределенных интегралов
18
19
[ xdx 1 / а Ъ \
' ] (а + хJF+хJ (а-ЬJ \а + х Ь + х)
а + Ь
П
а 4- х
' J
x2dx
(а-ЬJ \а + х Ь + х) + (а - 6K
_ 1 / а2 Ь2 \ 2аЬ
хJ "" (а-ЬJ \а + х + Ь 4-х У (а - бK П
(а + хJ(Ь + хJ "" (а-ЬJ \а + х + Ь 4-
> Интегралы, содержащие а2 + аз2.
а +
dx
а2 4-х2
-¦/
22
23
24
24
25
26.
27.
28
29
30
31.
32
33
34
35
36
J
¦I
' J ^
(a24-x2J 2a2(a24-x2)
x
c2K " 4a2(a24-x2J
X X
-arctg—.
a
3x
2п~
(a24-x2)n+1 2na2(a2 +
-?** !in(a2+x2).
a2 4- x2 2
1
(a24-x2)
1
J I (a
dx
2тш2 У (a24-x2)n '
= 1, 2, 3, ...
xdx
2 4-х2J
' J (a2 4-х2K
xdx
(«
2n(a2 4-х2)"
= 1, 2, 3, ...
x2 dx x
22 = x - a arctg —.
(а2 4-х2J
х2 dx
f x2dx
• J
¦J
'Jwr
х
2(а24-х2) + 2а
х
2n(a2
dx
' 2' 3' '••
х3 dx
f x3dx
I
' J x(a2 4-х2) ~ ^a2 ш a2 4- x2 *
dx
dx
2(n-l)(a24-x2)"-1 2n(a2 4- X2)n
x2
П
¦; n = 2, 3, 4, ...
f^rln ^
a2 4- x2 '
1 1
У x(a24-x2K 4a2(a24-x2J ^ 2a4(a24-x2)
> Интегралы, содержащие a2 — ж2.
37.
2.1. Интегралы, содержащие алгебраические функции
397
38.
39!
40.
41.
42.
43.
44.
45.
46.
47.
48.
49.
50.
51.
52.
53.
54.
>
55.
56.
57.
58.
59.
Г dx _
J (a'-x*? "
J (a*-
I
(a2 -x2J 2a2(a2-x2)
dx _ x
(a2 "
dx
¦In
а + х
a — x
3x
а + х
4а2(а2 -
8a4(a2-x2) 16a5 | a-x
. 2n-l
2па2(а2-х2)
2тш2
J (a2-:
; п = 1, 2, 3, ...
xdx
xdx
У (а2-*2J ~ 2(а2-х2)'
/• хах _ 1
У (а2-х2K " 4(а2-х2J '
xdx 1
(а2 - *2)»+1 " 2п(а2 -
/х2 dx о ,
= -х + —• In
а2 - х2 2
х2 dx х
a — x
/
-—In
:-x2J 2(a2-x2) 4a
x
a — x
x
a2-x2K 4(a2-x2J 8a2(a2-x2) 16a3 |a-x
f x2dx x 1 f dx
/ = / . n — i 2, 3, ...
У (a2-x2)»+l 2n(a2-x2)" 2n J (a2 -: °4" ' ' ' '
_x2)n+i 2n(a
f x3dx _ x2 a2 1
(a2-x2)"
(а2-х2J 2(а2-х2) 2
х3 rfx1
/
/
I* dx 1
У x(a2-x2) 2a2 П
У x(a2 — x:
/
+lln|a2-x2|.
2(п~1)(а2-х2)"-1 + 2п(а2-х2)"
; П" ' ' '•"
(а2-х2J 2а2(а2-х2)
1 ¦ I *2
—- In —
= ++
x(a2 - х2K 4а2(а2 - х2J 2а4(а2 - х2) 2а6
Интегралы, содержащие а3 + ж3.
In
а2 -х2
/ dx _ 1 , (а 4-хJ
У а34-х3 " 6а2 а2-ах4-
У
У
1 2х-а
2/3 S /3
(а3 4-х3J " За3(а34-х3)
grfa? Х а2 - ах 4- х2
2 Г dx
За3 J a3 4- *3 '
^ " ^П (а 4-хJ + ^^
/ xrfx _ х2 1 Г
У (а3 4-х3J " За3(а34-х3) За3 У а
1 2x- a
xdx
a3+,3-=iIn"°3 + l31-
398
Таблица неопределенных интегралов
60.
dx
61.
х(а34-х3) За3
dx
In
x(a34-x3J За3(а34-х3) За6
In
а3 4-х3
62
63.
* У х2(а34-х3) а3х а3 J
у dx _ __J
' У х2(а34-х3J " а*х
xdx
х2
¦I
xdx
(а3 4-х3J а*х За*(а34-х3) За^ J а3 4-х3 '
> Интегралы, содержащие а3 — ж3.
dx
64
65.
у dx = 1
J а3 - х3 6а2
dx
(а3-х3J За3(
а2 4- ах 4- х2 1 2х 4- а
(а - хJ + a2^ arCtS ач/З
_х J2_ у dx
а3-х3) + За3 У а3-х3 '
[xdx 1 .
66. / -- = -— In
У а3 — х3 6а
f^xdx__
67- У (а3-х3J "
x2dx
а2 + ах + х2
- xJ
- arctg
a\/3
За3(а3-х3) + За3
1 f xdx
а3 J а3 - x3 "
68.
69.
а3-х3
dx
= -^1„|ай-хй|.
1
-/
х(а3-х3):- За3
"rfx
In
а3-х3
¦In
X3
а3-х3
х(а3-х3J За3(а3-х3) За6
У х2(а3-х3) а3х ^ а3 У а3 - х3 *
72 / dx I *2 4 / xrfa:
У х2(а3-х3J а6х За6(а3-х3) За6 У а3 - х3 '
> Интегралы, содержащие а4 ± ж4.
ах\/2
73
74
75.
[ dx _ 1 а2 4- ах>/2 4- х2 1
У а4 4- х4 4а3>/2 " а2 -ах>/2 4-х2 + 2а3>/2
/J7 UX 1 X
4 , 4 = -ГТ arCtg "Г*
а4 4- х4 2а2 а2
arctg -
x*dx
+ iarcts7-
а4 4- х4 4а\/2 а2 - ах>/2 4- х2 2а\/2
76. /_^- = -L 1„
У а4 - х4 4а3
77- /^г = ^1п
78.
1 ах>/2
+ 1—7r arctg ¦
-X2
•= In
79.
а4 - х4 4а.
dx
а2-х2
а 4-х
а — х
- -—arctg—.
2а а
2а
1
х(а 4- bxm) am
In
2.2. Интегралы, содержащие иррациональные функции
399
2.2. Интегралы, содержащие
иррациональные функции
р> Интегралы, содержащие ж1/2.
Ьх1/2
80.
81.
82
= —х1/2 - —
x3/2dx 2x3/2 2а2хх/2 2а3
а2+Ь2х
¦h
bx1/2
rl/2
83
84
85
86.
87
88
89
90.
It.
(a2+b2xJ
x3/2ax
Ь2(а2+Ь2х)
afe3 аГС g
bxl/2
(a2+62xJ
dx
За
" ТГ arct6
/о
2fe
X
Ь^х"
•Ь2х
arctg
3fe2
(а2 - Ь2хJ
I 1_
Ь2х) 2аЬ3
- 2Ь2х3/2
91.
92
93.
dx
Ь4(а2-Ь2х)
а + Ъх1
за ,
— In
/«^
2
Ьх1'2
а-Ьх1/2
dx
(а2-
а2(а2 _
In
а-Ьх1/2
> Интегралы, содержащие (а + ЪхI/2.
94
95.
. /(а
Ь(р+2)
= "б3
(а +
р + 4
р 4- 6
Р + 2
1
р. 4-4
400
Таблица неопределенных интегралов
> Интегралы, содержащие (ж2 + а2
97. J(x2 + а2I/2 dx = jx(a2 + х2I/2 + -~- 1п[х + (х2 + а2I/2] .
*I + a2I'2dx=±.(a2 + 3?)*'2.
3
98.
99.
100. / —
101.
102.
103. f(x2 + a2)/2 dx = ax(x2 + a2)/2.
> Интегралы, содержащие (ж2 — a2
104. f(x2 - a2I'2 dx = lx(x2 - a2I/2 - — ln|x + (x2 - a2)'l2[
105
106.
107
108.
109.
110.
. /x(x2-a2I'2dx=-(x2-a2K'2.
J 3
. |(I2-a2K/2dx=ix(:C2-a2K/2-|a2
. I I(r2 _ a2)!/2 dx = (l2 _ O2)l/2 _
J X
> Интегралы, содержащие (a
2 —
ill.
— arcsin-.
2 a
112. [x(a2 - x2I'2 dx = -!(a2 - x2K'2.
J 3
113. /(a2 - x2K/2 dx = -x(a2 - x2K'2 + -a2x(a2 - x2I/2 + -?-a4 arcsin -.
J 4 8 8 a
114. / —(az-
x
115. / —====- = arcsin—.
J va2 — x2 a
116. \~^ = -(a2-*2I'2-
J v a2 — x2
117. /(a2 - x2)-3/2 dx = -a-2x(a2 - x2)/2.
2.3. Интегралы, содержащие тригонометрические функции 401
^ Формулы приведения. Ниже параметры а, 6, р, m, n могут
быть любыми, лишь бы не обращались в нуль знаменатели при
последовательном применении формулы. Обозначение: w = ахп + 6.
118. I хт(ахп + Ъу<1х= [xm+1t/^ + np6 f xmwP-1dx].
J m + np+1L J J
119. fxm(axn + b)pdx= —~ r[-xm+1t^+14-(m+n+np+l) /х
J bn(p +1) L J
120. [xm(axn + b)*> dx = l/ * . [хт+1шр+1 -a(m + n-+np+l) / *m+n
у 6(m 4-1) L /
121. [xm(axn+b)pdx=-- r[xm-n+1tiilH-1-*(m-n+l) fxm-n
J a(m -f np -f 1) L J
2.3. Интегралы, содержащие
тригонометрические функции
> Интегралы, содержащие sin ж. Обозначения: п = 1, 2, 3, ...
122. / sin(a + Ъх) dx = cos(a + Ьх).
J о
Г23. / xsinxda: = sinx — xcosx.
124. / x2sinxrfx = 2xsinx— (x2 — 2)cosx.
125. f xmsmxdx = -xm cos x + mx sinx - m(m - 1) j xm~2 sinxdx.
126. / sin2 x dx = -^-x - -J- sin 2x.
127. / sin3 x dx = — cos x + -|- cos3 x.
128. lsin2nxdx =
' zn 2n-2k -
ml
где Cm = — — биномиальные коэффициенты (О! = 1).
к\ (т — кI
129. у Sin2"+1 xdx=f2 (~1)*~И Скп cos2fe+1 х.
130. / J^L.
J sinx
131 t-dx
132.
133.
^?__ = cosx n-2 [ dx
in"x (n-l)ein»-1* + n-1 У sin—2xJ
4 /«i« • , sinfF-a)xl sinfF + a)xl
- / sinax smbxdx = bl LJ LI U_ a
J 2F-a) . 2F+a) '
А. Д. Полянин, В. Д. Полянин и др.
402
Таблица неопределенных интегралов
135 /
J
+ 6sinx
arctg
b-y/W=~a
In
,36
137'
J (a+6sinxJ ~
(a2-62)(a + 6sinx)
1 .
а Г
- b2 J
tgx
при б2 > a2.
dx
+ 6sinx
arctg
/а2 - б2 tgx
\у/Ь2-а2 tgx +
при a2 > b2,
при б2 > a2.
2ау/Ь2 — а2 I у/Ь2 — a2 tg х — а
> Интегралы, содерж:ащие cos ж. Обозначения: п = 1, 2, 3,
139. / cos(a + Ьх) dx = — sin(a + Ьх).
140. / xcosxc/x = cosx + xsinx.
141. / x2cosxdfx = 2xcosx+ (x2 - 2)sinx.
. /xmcosxdx = xmsinx + mxm~1cosx
. A cos2 x dx = }x + \ sin 2x.
144. / cos3 x d*x = — sin x — ~ sin3 x.
142
143
- 1) /
xmcosxdx.
145.
146.
147.
148.
2n-2jfe
k=0
***
/ ^ sinx n-2 Г dx
J cosnx ~ (n - ljcos"-1 x n- 1 J cosn~2 x ' П > 1ш
/sin fF — a)x] sin Г F + a)xl
cosaxcos6xdx= Ц i-i- + ^ LJ_ a ф ±Ъ.
2F-a) ^ 2F +a) ' *
{2 (a-6) tgx
— arctg ——
л/а2 — б2 л/а2 — б2
л/62-а2 | л/62 - а2 ^
/а*х 6 sinx а / с
(a+6cosxJ ~ (б2-а2)(а +6cosx) ~ б2 - а2 / 7+1
i + 6cosx
dx
(a-6)tgx/2
л/а2 - б2
-а2 - F-a)tgx/2
при a2 > 62,
cosx
2.4. Интегралы с обратными тригонометрическими функциями 403
154.
dx
Ъ2 cos2 х ал/а2 + Ъ2
dx
arct6
atgx
при а
> Ъ2,
2ау/Ь2 - а
Интегралы, содержащие tgx и ctga:
ava2 — Ь2 V а2 — б2
1 . | л/62-a2-atgx I - 2
In\ . 5— при Ь2 > а2.
2 - а2 I л/62 -a2 + atgx |
| cosx|.
156. / tgxdx = — In |
157. I tg2xdx = tgx-x.
157. I tg3 xdx = — tg2 x + In | cosx|.
/
t62«+^rf, = (-!)"+> ln|cosx| -
. /
158
159
160. , . . - 2 ~^
а2 + Ь2
161. / ctgxdx = ln|sinx|.
162. / ctg2 x dx = - ctgx - x.
163. / ctg3xdx= ctg2 x- In | sinx\.
ycg x x -{- ) x ^ 2n - 2fc + 1
165. / ctg n' x dx ^ (~1
dx 1
166
# /
ГГ"::
+ bctgx
2.4. Интегралы, содержащие обратные
тригонометрические функции
¦ / arcsin — dx = хarcsin ~ + л/а2 - х2.
J ¦ а а
Л. г\2 / х\2 у х
arcsin — dx = х [ arcsin — 1 - 2х + 2л/а2 - х2 arcsin —.
а / \ а / v а
167.
168.
170.
171.
хarcsin ~ dx = -i-Bx2 - а2) arcsin — + ^
arcsin
in i ^ = ~- Tarcsin |-) 2 + ±(х2 + 2а2)у/а2-
404 Таблица неопределенных интегралов
172. / f arccos — J dx = х I arccos — J — 2х - 2 у/а2
173. / хarccos — dx — —Bх2 — a2) arccos у/а2 - х2.
J a A a A
17А. I х2 arccos — dx = — f arccos — J (x2 + 2a2)y
175. I arctg — dx = xarctg— - — ln(a2 + x2).
J а а 2
176. /xarctg — dx = —(x2 + a2) arctg — - —.
J а 2 а 2
177. / x2 arctg ~ dx = — (arctg — ) - ^— + — ln(a2 + x2).
J a 3\ a/ 6 6
178. / arcctg — dx = x arcctg ~ + — ln(a2 + x2).
J а а 2
f x , 1 ж о 9ч x ax
179. I x arcctg — dx = — (xz + <r ) arcctg 1 .
J а 2 а 2
180. / x2 arcctg — dx = — [arcctg — J + — — ln(a2 + x2).
J a3\a/66
2.5. Интегралы, содержащие показательные
функции
181. / eaxdx= —
¦J-
. / хеах dx = еах (— - —) .
J \а a? J
182
183.
184. / *"е" dx = е« f-x" - ^-х"^
J I а а2
185. / — = ?. - J- In |a + Ьер:с|.
J а + ЬеР* а ар ' '
eaxsinj;dj;= — (asinx - cosx).
a2 + 1 у
/еаа: / 2 \
еах sin2 xdx = — ( a sin2 x - 2 sinx cosx -\ ).
а2 + 4 \ а У
188.
а2 + П'
189
190
/еаж
eaxcosj;dx= —^ (ocosx+ sinx).
eaxcos2xdx= — (acos2x + 2sinxcosx+ —).
a2 + 4 \ a /
191. [eaxcosnxdx= ea*2COSn X (acosx + nsinx) + ^—^ ( eax cosn~2 x dx.
J a? + n2 a2 + n2 У
2.7. Интегралы, содержащие гиперболические функции 405
2.6. Интегралы, содержащие
логарифмические функции
192
. / ln(ax) dx = xln(ax) — х.
193. I x\nxdx= — х2\пх х2.
194. / х*>]п(ах) dx = -2— х**1 ]п(ах) - . * 2 Д1*1, рф-\.
J р + 1 (Р+1г
195. [x(\nxJdx= 2-х2(InхJ - -x2lnx + jx2.
/<рР+1 2xp+1 2хр+1
^Г* A) l +
197
198
. /(lnx)9 dx = x(lnx)«. - g /(lnx)9 dx, gV -
. [xp(\nxJdx= —2— xp+1(lnx)9 ^- f xp(\nx)q-1 dx, p, g 96 -1.
У Р+ 1 p+ly
199. / ln(a + 6x) dx = —(ax + 6) ln(ax + 6) - x.
200. / ln(x2 + a2) dx = x ln(x2 + a2) - 2x + 2a arctg ~.
7 a
2.7. Интегралы, содержащие
гиперболические функции
> Интегралы, содержащие sha.
201. / sh(a + 6х) dx = ~- ch(a + 6х).
202. / xshxdx = xchx -shx.
203. /x2shxdx= (x2 + 2)chx-2xshx.
204. / xm sh x dx = xm chx -mi shx + m(m - l) /xmshxdx.
205. /sh2xdx= -j-x+ -^sh2x.
206. / sh3 x dx = - chx + |- ch3 x.
207. /shpxdx= -shP-^chx-^-^i- /shpxdx.
./ ' P P У
> Интегралы, содержащие ch а;.
208. / ch(a + Ьх) dx= — sh(a + bx).
J 0
209. / xchxdx = xshx-chx.
210.
406 Решения обыкновенных дифференциальных уравнений
/9 1 1
ch^ x dx = -jx + X sh 2x.
213. / ch3 dx = sha; + |- sh3 x.
/1 , p- 1 f _2
chp x dx = — sh x chp x H / chp x dx.
P P J
> Интегралы, содержащие th ж и cth x.
215. I thxdx = ln|chx|.
216. I th2 xdx = x-thx.
217. fth3xdx= -— th2x+ln|chx|.
218. [thpxdx = ^—thP-^-f- [thp~2xdx.
J p — 1 У
219. /cth dx = ln|shx|.
220. / cth2 x dx = x - cth x.
/3 1 2
221. /cth x dx = cth x-f-ln|shx|.
У 2
222. [cthpxdx = cth^x-b [ cthp~~2 xdx.
J P-l J
3. Решения обыкновенных
дифференциальных уравнений
3.1. Уравнения первого порядка*
Решение: у = }(х) dx + С.
f dy
Решение: х = / —^ [- С.
J f(y)
Частные решения: у = Ак, где Ак — корни алгебраического (или трансцен-
трансцендентного) уравнения }(Ак) = 0.
* В этом приложении приведены решения обыкновенных дифференциальных
уравнений, коэффициенты которых зависят от произвольных функций. Для крат-
краткости вместо слов «общее решение» или «общий интеграл» будем писать «реше-
«решение».
3.1. Уравнения первого порядка 407
У* = f(x)g(y).
Уравнение с разделяющимися переменными. Решение:
Частные решения: у = Ак, где Ак — корни алгебраического (или трансцен-
трансцендентного) уравнения д(Ак) = 0.
4. д(х)у!с = fi(x)y + fo(x).
Линейное уравнение. Решение:
у = CeF + eF I e-F^-dx, где F(x) = [ Ml dx.
J g(x) J g(x)
5- g(x)y'x = fi(x)y + fo(*)ya.
Уравнение Бернулли. Здесь а — любое (при а = 0ио=1 см. линейное
уравнение 4). При а ф 1 замена w(x) = yl~~a приводит к линейному уравнению:
Решение:
yl-> = CeF + (l-a)eF j e~FЩ^-dx, где F(x) = A - а) / AEL dx.
J 9\x) J g(x)
6- У4 = f(y/x).
Однородное уравнение. Замена и(х) = y/x приводит к уравнению с
разделяющимися переменными: хи'х = f(u) — и.
Решение: / = In \x\ + С.
J }{u) - и
Частные решения: у = Акх, где Ак — корни алгебраического (или трансцен-
трансцендентного) уравнения Ак — f{Ak) = 0.
Уравнение Риккати.
1. Если известно частное решение уравнения Риккати у0 = уо(х), то
общее решение находится по формуле
i -1
где
у = у0 (х) + Ф(х) \с - J Ф(х) Ьк± J ,
) = expU[2f2(x)y0(x) + fl(x)]-^\.
Частному решению Уо(х) соответствует значение С = оо.
2. Преобразование
и(х) = expf - / —ydx j
приводит общее уравнение Риккати к линейному уравнению второго порядка
91 hu"xx +^[/2^ ~ 9(fo)x -/1/2]^ + /0/2^ = °i
которое часто решается проще, чем исходное уравнение Риккати.
> В уравнениях 8 — 17 принятд обозначение: f = f(x).
астное решение: у0 = а. Общее решение получается с помощью формулы,
приведенной после уравнения 7.
408 Решения обыкновенных дифференциальных уравнений
9. У = fy2 + ay - ab — b2f.
Частное решение: у0 = 6. Общее решение получается с помощью формулы,
приведенной после уравнения 7.
Ю. У'Х=У2 + xfy + /.
Частное решение: t/0 = —!/#• Общее решение получается с помощью форму-
формулы, приведенной после уравнения 7.
11. у'^ = /у2 - axkfy + акхк~г.
Частное решение: t/0 = а0°к • Общее решение получается с помощью формулы,
приведенной после уравнения 7.
12. у4 = /У2 + акхк~х - a2x2kf.
Частное решение: у0 — ахк. Общее решение получается с помощью формулы,
приведенной после уравнения 7.
is. у; = -(к +1)* V + xh+1fy - f.
Частное решение: t/0 = x~k~*. Общее решение получается с помощью форму-
формулы, приведенной после уравнения 7.
14- *у; = /У2 + ку + ax2kf.
Решение при а > 0: у = у/ахк tg f у/а I xk~l f dx + С 1.
Решение при a < 0: t/= \J\a\xk th(-y^jaj / xk~l}dx + Cj .
15. Жу; = я2*/у2 + (aajfc/ - fe)y + 6/.
Замена z — xky приводит к уравнению с разделяющимися переменными:
z'x=xk-1f(x)(z2 + az^b).
16- У'* = /У2 + 9У - а2/ - а^-
Частное решение: t/0 = a* Общее решение получается с помощью формулы,
приведенной после уравнения 7.
17- у4 = /У2 + 9У + акх*-1 - ахкд - a2fx2k.
Частное решение: у0 = ах . Общее решение получается с помощью формулы,
приведенной после уравнения 7.
> В уравнениях 18 — 33 приняты обозначения: }, д, h — произвольные функ-
функции сложного аргумента, который указан в круглых скобках после знака
функции и может зависеть от обеих переменных х и у.
18- У4 = f(ax + Ьу + с).
При 6 = 0 это уравнение вида 1. При 6^0 замена и(х) = ах + Ьу + с приводит
к уравнению вида 2: и'х = bf(u).
Замена и = у + ахк + 6 приводит к уравнению вида 2: и'х — }(и).
3.1. Уравнения первого порядка 409
20. У'х = -f(xkym).
X
Обобщенно-однородное уравнение. Замена z = хкут приводит к урав-
уравнению с разделяющимися переменными: xz'x = kz + mzf(z).
21. у; = f(x)y1+k + д(х)у + Цх)у1~к.
Замена w = yk приводит к уравнению Риккати: w'x = kf(x)w2 + kg(x)w+kh(x).
22. у; = -—- + ykf(x)g(xnym).
rn x
Замена z = xnyrn приводит к уравнению с разделяющимися переменными:
п—пк к + тп—1
z'x = mx rn f(x)z rn g(z).
, f ax + by + c \
V olx + /3t/ + 7 )
by — cC cot — cry
При А = aC — ba ф О преобразование х =¦ z^-\ , у = u(z) -\
A A
приводит к уравнению
Деля числитель и знаменатель дроби в правой масти на z, получим однородное
уравнение вида 6.
При А = 0, 6 ф 0 замена w(x) = ax + by + с приводит к уравнению вида 2:
При А = 0, C ф 0 замена v(x) = ax+/?t/+7 приводит к уравнению вида 2:
24. у'х = xk^1y1^Tnf(axh + by171).
Замена w = axk + bym приводит к уравнению с разделяющимися переменными:
w =xk-1 )]
25. уку'„ + ахк + g(x)f(yk^1 + ахк+г) = 0.
Замена w = t/fc+1 + ахк+1 приводит к уравнению с разделяющимися перемен-
переменными: w'x + (к + l)g(x)f(w) = 0.
Это — уравнение Бернулли относительно х = х(у) (см. уравнение 5).
27. у; = e-x*f(ex*y).
Замена и = еХху приводит к уравнению вида 2: и'х = f(u) + Хи.
28. у; = е*«/(е*«а;).
Замена и = ел^х приводит к уравнению с разделяющимися переменными:
410 Решения обыкновенных дифференциальных уравнений
29- »; = yf{e°"ym).
Экспоненциально-однородное уравнение. Замена z — eQXym приводит
к уравнению вида 2: zx = az + mzf(z).
зо. у'х = i/(xfcee«).
Ж
Экспоненциально-однородное уравнение. Заменам = хкеау приводит к
уравнению с разделяющимися переменными: xz'x = kz + аяДя).
Замена и = е~Лу приводит к линейному уравнению: и'х = — \д(х)и — Л/(х).
32. у; =-|-+/(*Ж**е»).
Замена л = xfcey приводит к уравнению с разделяющимися переменными:
зз. у4 = -—у + yhf(x)g(e°"ym).
т
Замена z = eQXym приводит к уравнению с разделяющимися переменными:
[а 1 fc+m—1
A - к)х \f(x)z m g(Z).
771 J
3.2. Линейные уравнения второго порядка
> Предварительные замечания.
Линейное однородное уравнение второго порядка имеет вид
/2(*)»«« + /i(*)yi + /o(*)» = O. A)
Пусть у0 = у0 (х) — любое нетривиальное (у0 =? 0) частное решение этого
уравнения. Тогда общее решение уравнения A) можно представить в следующем
виде:
где F=f^Ldx. B)
J h
Для конкретных уравнений, рассмотренных далее, часто будут указаны
только частные решения. Общие решения этих уравнений можно получить с
помощью формулы B).
> Обозначения: } = f(x) — произвольная функция; а, 6, k, a, @ — произвольные
параметры.
Решение:
1 fx
Сх cos(kx) + С2 sin(kx) + — / f(() sin[k(x - ?)] d( при a = k2 > 0,
к Jxq
\ ch(kx) + C2 sh(kx) + ^ I f(() sh[k(x - ()] d( при a = -k2 < 0,
где xQ — любое.
3.2. Линейные уравнения второго порядка 411
2. y'L + «Ух + Ьу = /•
Замена у = wexp(—~ax) приводит к уравнению вида 1:
3. V'L + fy* = 9-
Решение: у = Ct + j e~F (c2 + IeFgdx\ dx, где F = / / dx.
4- y'^ + xfy'3t-fy = O.
Частное решение: у0 = x.
5. y'L + fv* + e(/ - °)y = o-
Частное решение: у0 = e~o:r.
6- y'L + /Ух + a(x"f ~ ax2k + кхк-*)у = О.
Частное решение: yQ — expf — — x +1 J .
7- y'L + (f + <™h + Ь)Ух + К"** + b)f + akx"-1^ = 0.
Частное решение: y0 = expf — — x*+1 — bx J .
\ л -f- 1 /
8- a;y;'x + xfy'x - [(ax + 1)/ + 0@3; + 2)]y = 0.
Частное решение: yQ = xeax.
(О - l)fy = 0.
Частное решение: t/0 = ^1—a-
жу^ + [(аж + 1)/ + аж - 1]ух + a2xfy = 0.
Частное решение: у0 = (ах + 1)е~ах.
+ Ь/у = 0.
Частное решение: у0 = а -\ .
х
y = 0.
Частное решение: у0 = expf-—-—xk+i J .
жУхх + (*/ + ахк)у'х + {(ахк - 1)/ + акхк-г]у = 0.
Частное решение: у0 =хехр(-—хк\
жУхх + [(ахк + 1)/ + ofea!fc + 1 - 2к]у'х + a2kx2k-1fy = 0.
Частное решение: % = (ах* + 1) ехр(-ох*).
412 Решения обыкновенных дифференциальных уравнений
Неоднородное уравнение Эйлера.
Замена х = е* приводит к уравнению вида 2:
16- ж2у;'х + ж/у; + а(/ - а - 1)у = 0.
Частное решение: у0 = х~~а.
17- ж2у;'х + x{f + 2а)У; + [(Ьх + а)/ - Ь2*2 + а(а - 1)]у = 0.
Частное решение: у0 = х"ае~Ьаг.
18- *2Ухх + Ж/^ + [(a*2fc+1 + fe)/ - o2a;4fc+2 - fe2 - fe]y = 0.
Частное решение: у0 = x""fc expf x2fc+1 J .
\ 2k -f- 1 /
19. y;'a + / sh(ax)y; - o[o + / ch(aa;)]y = 0.
Частное решение: у0 = sh(ax).
20- Ухх ^ / ch(aa5)l/x "~ °[° + / sh(oa;)]y = 0.
Частное решение: t/0 = ch(ax).
21 - У** + / sin(oa5)yx + a[o - / cos(aaj)]y = 0.
Частное решение: у0 = sin(ax).
22. Ухх + / cos(aaj)yx + a[o + / sin(aa;)]y = 0.
Частное решение: yQ = cos(ax).
3.3. Нелинейные уравнения второго порядка
> Обозначения: f,g,h — произвольные функции сложных аргументов, ука-
указанных в круглых скобках после знака функции (аргумент может зависеть
от х, у).
Замена и(у) = у'х приводит к уравнению первого порядка с разделяющимися
переменными: ии' = f(y).
Решение: / Cj + 2 L f(y) dy\ dy = C2 ± x.
Частные решения: t/ = Ak, где Afc — корни алгебраического (или
трансцендентного) уравнения f(Ak) — 0.
2- <* = f(ay + Ьх + с).
Замена w = ay + Ьх + с приводит к уравнению вида 1: w"x = af(w).
Замена w = у + ах2 + Ьх + с приводит к уравнению вида 1: w'x'x = }(w) + 2а.
4.1. Произвольная ортогональная система координат 413
Преобразование ? = 1/х, гу = i//x приводит к уравнению вида 1: гу'' = /(гу).
5- У^ = *-3/2/<-1/2)
Полагая w = ух'2, получим
Интегрирование этого уравнения приводит к уравнению первого порядка с
разделяющимися переменными.
-I/2
Л1
Сх + ~w2 + 2 / /(iw) rfiy
Сх + ~w2 + 2 / /(iw) rfiy dw = C2± In |ar|.
6- yL
Замена w = у -\- ае^х приводит к уравнению вида 1: гу"д. = /(гу).
7. я2!/;'х = »а/(яв*е») + к.
Замена у = w — к\пх приводит к уравнению вида 1: w"x = f(ew).
8- x2y'^ = x2f(y+alnx) + a.
Замена w = у + alnx + b приводит к уравнению вида 1: г(/"х = /(гу).
9. у'^ = f(y + a sin ж) + о sin ж.
Замена w = t/ + asinx+b приводит к уравнению вида 1: w"x = /(гу).
10 2/ =
а cos ж + Ь) + о cos х.
Замена гу = у + a cos х + Ь приводит к уравнению вида 1: ги^'д. = /(ги).
4. Ортогональные криволинейные
системы координат
Ниже приведены формулы для основных скалярных и векторных дифферен-
дифференциальных операций в ортогональных криволинейных системах координат.
4.1. Произвольная ортогональная система
координат
Криволинейные координаты яг1, х2, х3 задаются как функции прямоугольных
декартовых координат х, t/, z:
х1 = х1(х,У1г), х2 = x2(x,t/,z), xz = x3(a:,y,^).
Используя эти зависимости, можно выразить дг, j/, г через криволинейные коорк
динатых1, х2, хз.
414 Ортогональные криволинейные системы координат
Компоненты метрического тензора д^ определяются по формулам
о (х1 х2 х3\ -
А,(* ,х ,х ) -
gij(x1,x2,x3)=gji(X1,x2,x3); i,j = 1, 2, 3.
Система координат является ортогональной, если выполняются соотношения
^tJ(a:1,a:2,a:3) = 0 при i ф j.
В этом случае третий инвариант метрического тензора определяется формулой
9 = 0и 022033 •
Ниже приведены основные дифференциальные операторы в ортогональной
криволинейной системе координат я?1, х2, хг. Соответствующие единичные на-
направляющие вектора обозначаются е j, е2, е3 •
Градиент скаляра р:
dp r
Дивергенция вектора v = t1v1 + *2V2 + *3V3:
V v= —
Градиент скаляра с по вектору v:
дс
Градиент вектора w по вектору v:
Ротор вектора v:
д
у/а
+ «з
9x3 Vvi
д /
Оператор Лапласа (лапласиан) скаляра с:
Ас = —-
+
Эх» У 9x2
Лапласиан вектора v:
Эр
дс
дс
дс
д f^g дс \]
Эхз ^ <,зз 9x3 ^ J
- V
4.3. Сферическая система координат г, 0, ч> 415
4.2. Цилиндрическая система координат
Преобразования координат (О <С с/? <С 2тг):
р = у/х2 + у2, x = pcos<p,
siny> = y/p), y = psin<p,
Компоненты метрического тензора:
9РР = 1» Яцнр = Р » 9Zz = !» л/# = Р-
Градиент скаляра р:
dp -* 1 dp •? dp -*
yp 3; ^ -L. — ^ -I- \
up p d(p dz
Дивергенция вектора v:
^_ 1 d(pvp) 1 9г/^ dvz
p dp p dip dz
Градиент скаляра с по вектору v:
_ 9с vv> 9с дс
р dp p dip z dz
Градиент вектора w по вектору v:
(у • V)w = (у • V)iypiT + (у • V)«/ ? + (v • V)«/ziTz.
Ротор вектора v:
dz
^ _ аг^л ^i Г d(pV(p) _ dvl +
z dp У^+ p [ dp d<p\tz-
Лапласиан скаляра с:
_ J_JL /" ^l\ 1 Э2с Э2с
" p dp V dp)* p2 "a^2"+ ^I2"'
c
4.3. Сферическая система координат г, в,
Преобразования координат (О^0^тт, 0 ^ (р $ 2тг):
= у/х2 + у2 + z2, х — г sin ^ cos V?
= arccos —, у— г sin ^ sin <p.
У /. у \
37 \/х2 4* у2
416
Некоторые физические постоянные
Компоненты метрического тензора:
9гг = *» 9вв - г2> $W - г2 sin2 0, y/g-r2 sin в.
Градиент скаляра р:
_ dpj* }_dP_* I dp *
Дивергенция вектора v:
rsinxp
Градиент скаляра с по вектору v:
v" '' r dr ' г d0 ' гАпв Э<р'
Градиент вектора w по вектору v:
Ротор вектора v:
Эв
r [sinfl dip Эг
[ J
r [ dr
Лапласиан скаляра с:
1 d / 2dc
Ac = 7^" aT (r aT
1 d
dc
d2c
5. Некоторые физические постоянные
ТАБЛИЦА 3
Основные физические постоянные
Название
Гравитационная постоянная
Комптоновская длина волны протона
Комптоновская длина волны электрона
Коэффициент в законе Био — Савара
Коэффициент в законе Кулона
Магнитная постоянная
Обозначение
7
р трс
К
тес
Мо
4тг
1
4тге0
1
До - —т
Значение
6,6720-101 Нм2/кг2
1,3214-Ю-15 м
2,4263-10~12 м
10~7 Гн/м
9,00 • 109 м/Ф
1,2566-10~8 Гн/м
5. Некоторые физические постоянные
417
ТАБЛИЦА 3
Название
Магнитный момент протона
Магнитный момент электрона
Масса нейтрона
Масса протона
Масса электрона
Отношение масс протона и электрона
Постоянная Авогадро
Постоянная Болыдмана
Постоянная Вина
Постоянная Планка
Постоянная Планка
Постоянная Стефана—Больцмана
Скорость света в вакууме
Удельный заряд электрона
Универсальная газовая постоянная
Электрическая постоянная
Элементарный заряд
Энергия покоя нейтрона
Энергия покоя протона
Энергия покоя электрона
(продолжение)
Обозначение
Р*пр
Рте
тп
т?
те
тР
те
к = R/NA
Ь
h
2тг
тг2А:4
47 ~ 60 C2fc3
с
-е/те
R
ео
е
тпс2
трс2
тес2
Значение
1,4106-Ю-26 Дж/Тл
9,2848 • 10~24 Дж/Тл
1,6750-Ю-27 кг
1,6726-Ю-27 кг
9,1095 • 10~31 кг
1836,15
6,0220 • 1023 моль
1,3807-10~23 Дж/К
2,8978 10~3 м-Кл
6,6262 • 10~34 Дж • с
1,0546-10~34 Дж-с
5,6703 10"8 Вт/(м2-К4)
2,9979- 10е м/с
-1,758&- 1011 Кл/кг
8,3144 Дж/(моль - К)
8,8542 • 10~12 Ф/м
1,6022-10~19 Кл
939,57 МэВ
938,28 МэВ
0,51100 МэВ
ТАБЛИЦА 4
Астрономические постоянные
Название
Стандартное ускорение свободного падения
Масса Земли
Плотность Земли (средняя)
Радиус Земли (средний)
Расстояние от Земли до Луны (среднее)
Расстояние от Земли до Солнца (среднее)
Масса Солнца
Обозначение
М3
м3
Рз
Яз
—
—
Мс
Значение
9,8067 м/с2
5,976 - 1024 кг
5,52 - 103 кг/м3
6378 км
3,844 • 108 м
1,496-1011 м
1,99-1030 кг
Предметный указатель
Абсолютно твердое тело 314
— черное тело 291
Абсолютное удлинение 365
Абсцисса 10
Аксиомы статики 318
Алгебраическое дополнение 29
Амплитуда затухающих колебаний
250
— колебаний 243
Аналитическая геометрия в про-
пространстве 17
— геометрия на плоскости 10
— механика 344
Анизотропия искусственная 287
Арккосинус 42
Арккотангенс 43
Арксинус 42
Арктангенс 43
Асимптота 49
— вертикальная 49
— гиперболы 15
— наклонная 49
— графика функции 49
Базис системы векторов 37
Бесконечно большие функции 47
— малые функции 47
Билинза Бийе 273
Биномиальные коэффициенты 390
Бинормаль 304
Бипризма Френеля 273
Вектор 18
— п-мерный 36
— Пойнтинга 240
— Умова 257
— напряжения 358
— плоскости нормальный 22
— угловой скорости 138
Векторная диаграмма 243
Векторное произведение 20
Векторы ортогональные 36
Вероятность 125
— геометрическая 125
Вероятность условная 126
Вечный двигатель второго рода 176
— двигатель первого рода 173
Взаимная индукция 236
Вибратор Герца 264
Виртуальное перемещение 347
Внецентренное растяжение (сжатие)
379
Внешние силы 356
Внутренние силы 356
Внутренняя энергия газа Ван-дер-
Ваал ьса 178
— энергия идеального газа 178
Возможное перемещение 347
Волна монохроматическая плоская
262
— плоская 254
— поляризованная по кругу 263
— поперечная 254, 262
— продольная 254
— стоячая 259
— эллиптически поляризованная 263
Волновая зона 264
— поверхность 255
Волновое сопротивление 250
— число 255
Волновой вектор 255
— пакет 258
Волны 242
— расходящиеся сферические 255
— расходящиеся цилиндрические 255
Вращение равномерное 307
— равнопеременное 307
— твердого тела вокруг неподвижной
оси 306
Время когерентности 244
— релаксации 171
— собственное 166
Вторая задача динамики 330, 331
Второе начало термодинамики 176
Второй закон Ньютона 317
Выпуклость вверх 55
— вниз 55
Выражение подынтегральное 65
Предметный указатель
419
Газ разреженный 197
-— ультраразреженный 197
Гармоники 260
Геометрическая оптика 267
-— прогрессия 92
Геометрический смысл двойного
интеграла 80
— смысл несобственного интеграла
77
— смысл определенного интеграла 73
Гибкость стержня 386
Гипербола 14, 15
Гиперболические функции 391
Гиперболический параболоид 28
Гиперболоид 28
Гипотеза плоских сечений 364, 372
— чистого изгиба 372
Гиромагнитное отношение 232
Гироскоп 163
— тяжелый 163
Гистерезис 233
Главная нормаль 304
Главное сечение кристалла 285
Главные диэлектрические проницае-
проницаемости 285
— напряжения 360
— центральные оси инерции 377
Главный вектор сил инерции 345
— вектор системы сил 316
— момент сил инерции 345
— момент системы сил относительно
центра 316
Голография 276
Градиент 61, 149
Граница рентгеновского спектра 298
График функции 57
Давление волны 263
— критическое 188
— света 298
Движение вращательное 138
~ замедленное 303
~ относительное 137, 312
— переносное 312
плоскопараллельное 308
по окружности 137
— поступательное 138, 306
— равномерное 136, 305
Равнопеременное 305
— Равноускоренное 136
— реактивное 145
с неподвижной точкой 162
—¦ сложное 312
—¦ составное 312
твердого тела плоское 138, 162
Движение ускоренное 303
— центра масс 145
Двойные интегралы 79
Декартова прямоугольная система
координат 17
Декремент затухания 250
— затухания логарифмический 250
Деформации при кручении 366
Деформация 356, 358
— линейная 359
— угловая 359
Диамагнетики 229, 232
Диаметр множества 79
— разбиения 73, 79, 85
Дивергенция 90
Динамика 140
— материальной точки 329
— твердого тела 160
Дипольный момент 198
Директриса параболы 16
Диспергирующая среда 287
Дисперсия 128, 130, 258, 287
— аномальная 288
— нормальная 288
Дифракционная решетка 280, 282
Дифракция 277, 278, 282
— Фраунгофера на круглом отвер-
отверстии 279
— Фраунгофера от щели 278
— рентгеновских лучей на кристалле
282
Дифференциал 50
— второго порядка 54
— функции 59
Дифференциальное уравнение
неоднородное 111
— уравнение однородное 111
Дифференциальные операции 90
— операции векторные 92
— уравнения первого порядка 406
— уравнения, допускающие пониже-
понижение порядка 110
Дифференцирование интеграла по
переменному верхнему пределу 74
— неявной функции 60
Диэлектрик 208
— изотропный 210
Диэлектрическая проницаемость 210
Диэлектрические оси кристалла 285
Длина волны 255
— дуги кривой 76
— пути оптическая 268
— свободного пробега 194
Домены 232
Допускаемое напряжение 365
420
Предметный указатель
Достаточные условия сходимости
несобственных интегралов 77
Дробь неправильная 68
— правильная 68
— рациональная 68
Естественные оси координат 304
^Кесткость 356
— сечения стержня 365
Жидкость перегретая^ 188
Жорданово преобразование 35
Задание функции аналитическое 39
— функции неявное 39
— функции параметрическое 39
Задача Коши 105, 109, 116
— статически неопределимая 320
— статически определимая 320
Задачи расчета на прочность 365
— статики 318
Закон Ампера 223
— Био — Савара— Лапласа 224
— больших чисел 131
— Буге^а 290
— Видемана—Франца 222
— вращения твердого тела 307
— всемирного тяготения 155
— Гаусса 130
— Гука 359
— Дальтона 185
— движения 135
— Джоуля — Ленца 219
— Джоуля — Ленца для участка цепи
221
— инерции 317
— Кеплера второй 153, 157
— Кеплера первый 157
— Кеплера третий 157
— Кирхгофа 291
— Кулона 197, 198, 328
— Малюса 283
— независимости световых пучков
267
— Ньютона второй 141
— Ньютона первый 140
— Ньютона третий 141
— отражения света 267
— Ома 219
— Ома для неоднородного участка
цепи 220
— Ома для неразветвленной цепи 221
— парности касательных напряжений
360
Закон полного тока 226
— преломления света 267
— прямолинейного распространения
света 267
— равенства действия и противодей-
противодействия 317
— распределения случайной величины
нормальный 130
— релятивистской динамики
основной 169
— Рэлея 290
— смещения Вина 293
— Снеллиуса 284
— сохранения импульса 143, 145
— сохранения кинетического момента
339
— сохранения количества движения
337
— сохранения механической энергии
149
— сохранения момента импульса
151, 153
— сохранения электрического заряда
197
— сохранения энергии 146
— сохранения энергии для электро-
электромагнитного поля 240
— Стефана—Больцмана 292
— трения качения 329
— трения скольжения 328
— Фарадея 234
— Фика 196
— электромагнитной индукции 234
Законы Галилея—Ньютона 317
— геометрической оптики 267
— трения 328
Замена переменной (подстановка) в
определенном интеграле 75
— переменных в двойном интеграле
81
— переменных в тройном интеграле
84
Заряд электрический 197
— элементарный 197
Заряды свободные 206
Зеркала Френеля 273
Зеркало Ллойда 273
Значение функции наибольшее 55
— функции наименьшее 55
Зоны Френеля 277
Предметный указатель
421
Идеальный газ 183
Изгиб 369
поперечный 369
— прямой 369
с кручением 381
— чистый 369
Изгибающий момент 369
Излучательная способность тела 291
Излучение Вавилова— Черенкова 276
— волн движущимися зарядами 264
— плоского тока 264
Изотермы реального газа 188
Импульс 141, 144
— релятивистский 168
— силы 141, 336
Индуктивность 236
Индукция электростатическая 207
Инерциальные системы отсчета 317
Интеграл дифференциального
уравнения 104
— неопределенный 64
— несобственный 77, 78
— определенный 73
— расходящийся 77, 78
— Фурье 102, 245
Интегралы от неограниченных
функций 78
— с бесконечными пределами 77
— , содержащие алгебраические
функции 395
— , содержащие гиперболические
функции 405
— , содержащие иррациональные
функции 399
— , содержащие логарифмические
функции 405
, содержащие обратные* тригоно-
тригонометрические функции 403
, содержащие показательные
функции 404
, содержащие тригонометрические
функции 401
Интегральная сумма 85, 86, 88, 89
Интегральные кривые 105
Интегрирование иррациональных
функций 70
— неравенств 80, 83
— по частям 66, 75
— показательных 71
рациональных функций 68
тригонометрических функций 71
четных и нечетных функций 74
Интенсивность волны 258
— колебаний 271
лучистого потока 269
Интенсивность, электромагнитной
волны 263
Интервал 38 ;
— замкнутый 38
— полуоткрытый 38
— сходимости 97
— сходимости степенного ряда 97
Интерференция в тонких пленках 275
— волн 259, 271
— от естественных источников света
273
— света 271
Источник ламбертовский 270
Каноническое уравнение 24
— уравнение поверхностей второго
порядка 26
— уравнение эллипса 15
Квант света 297
Квантовая гипотеза Планка 295
Кинематика 302
— твердого тела 138, 306
— точки 135, 302
Кинетическая теория идеального газа
183
Кинетический момент 338
Кипение 191
Когерентность световых волн 274
Когерентные источники 259
Колебания 242
— вынужденные 249, 251
— гармонические 242, 243
— затухающие 249
— линейно поляризованные 245
— механические вынужденные 251
— свободные механические 245
— свободные незатухающие 245
— собственные 260
— электрические вынужденные 253
— электрические затухающие 250
— эллиптически поляризованные 245
Количество движения механической
системы 336
— движения точки 335
Коллинеарные векторы 18
Комбинаторика 123
Конденсатор 214, 286
Конус 28
Координата дуговая 304
Координаты вектора 36
— декартовы 10
— полярные 10
— точки 10
— центра тяжести плоской пластины
82
422
Предметный указатель
Координаты центра тяжести тела
85, 86
— цилиндрические 18
Косинус 41
Косинус-преобразование Фурье 103
Космическая скорость вторая 158
— скорость первая 157
Косой изгиб 377
Котангенс 42
Коэффициент взаимной индукции 237
— давления температурный 172
— затухания 249
— затухания волны 255
— объемного расширения 172
— ослабления 290
— отражения 263, 284
— поверхностного натяжения 192
— полезного действия 176
— приведенной длины 385
— продольного изгиба 386
— Пуассона 361
— самоиндукции 236
— сопротивления температурный 220
— трения динамический 328
— трения качения 329
— трения статический 328
Коэффициенты разложения 37
Краевой угол 193
Красная граница фотоэффекта 296
Кривая возгонки 190
— плавления 190
Кривизна 304
— оси 373
Криволинейный интеграл второго
рода 85, 86
— интеграл первого рода 85
Критерий Коши сходимости ряда 93
— Рэлея 280
Критическая сила 383
Крутящий момент 366
Кручение 366
Ламбертовским источником 270
Линеаризация функции 59
Линейная алгебра 28
— комбинация 37
Линейное дифференциальное
уравнение 107, 111
— неоднородное дифференциальное
уравнение 113
— однородное дифференциальное
уравнение 111
Линейные дифференциальные
уравнения второго порядка 410
Линейный гармонический осциллятор
265
Линия уровня 57, 61
Лоренцов четырехмерный вектор D-
вектор) 167
Лучистый поток 269
Магнетик изотропный 231
Магнитная индукция 223, 224
— проницаемость 231
Магнитное поле 223
Магнитный момент 224
Мажоранта ряда 96
Максимум 54
Масса 140, 317
— материальной кривой 86
— плоской пластины 82
— приведенная 153
— системы 333
— стержня переменной плотности 76
— тела переменной плотности 85
Математическое ожидание 128, 129
Матрица 30, 33
— единичная 32
— квадратная 31
—: невырожденная 32
— обратимая 32
— обратная 32
— расширенная 33
Мгновенная ось вращения 311
Мгновенный центр скоростей 309
— центр ускорений 310
Метод вариации постоянных 113
— Жордана— Гаусса 35
— замены переменной 66, 67
— касательных 120
— ломаных Эйлера 122
— наименьших квадратов 118
— неопределенных коэффициентов
114
— Ньютона 120
— отрицательных масс 327
— разбиения 327
— Рунге—Кутты 122
— сечений 357
— узловых потенциалов 221
— хорд 120
— электростатических изображений
207
Механизмы поляризации 212
Механическая связь 314, 322
— система 314
Механическое движением 135
Минимум 54
Минор 29, 32
Предметный указатель
423
Множество замкнутое 57
значений 39
неограниченное 57
ограниченное 57
— открытое 57
Множитель Лагранжа 63
Модуль вектора 18, 36
всестороннего сжатия 172
— сдвига 362
— упругости второго рода 362
— упругости первого рода 361
Молекулярная оптика 287
— физика 170
Молекулярно-кинетическая теория
170
Молярная теплоемкость 175
Момент дипольный 198, 212
— импульса 152
— импульса системы 153
— инерции 160, 333
— пары сил 316
— силы 151, 315
— силы относительно оси 152
— сосредоточенный 356
Моменты инерции главные 163
— инерции плоской пластины 82
— инерции тела 85
Мощность 147
Намагниченность вещества 229
— насыщения 233
— остаточная 233
Направляющие косинусы 20
Напряжение 220, 358
— касательное 358
— критическое 383
— максимальное 375
— нормальное 358
Напряжения при кручении 366
Напряженно-деформированное
состояние 360
Напряженность магнитного поля 230
поля тяготения 156
~~ электРического поля 199
Насыщенный пар 188
Начальные условия 136
Неизвестное базисное 34
разрешенное 34
свободное 34
Неинерциальная система отсчета
158, 317
Нейтральный слой 372
Нелинейные Дифференциальные
Уравнения второго порядка 412
Необходимый признак сходимости
ряда 92
Неоднородное уравнение Эйлера 412
Неопределенный интеграл 64
Непрерывность 48, 57
Неравенство Клаузиуса 178
— Чебышева 131
Несобственные интегралы 77
Неупругий удар 169
Неявная функция 60
Обертоны 260
Область определения 39, 57
— сходимости ряда 95
Обобщенные координаты 346,
348, 351
— силы 351
— скорости 351
Обратные гиперболические функции
394
— тригонометрические функции 392
Общее решение дифференциального
уравнения n-го порядка 109
— уравнение динамики 350
— уравнение кривой второго порядка
17
Общий интеграл дифференциального
уравнения 105, 109
— член последовательности 44
— член ряда 92
Объединение событий 124
Объем критический 188
— области 84
— тела вращения 76
Обыкновенное дифференциальное
уравнение 104
Одноосное растяжение 361
— сжатие 361
Одноосные кристаллы 285
Однородное уравнение 107
Окрестность 57
— точки 38
Окружность 14
— соприкасающаяся 304
Оператор Гамильтона 91
— Лапласа 92
Определенный интеграл 72
Определитель 28
— второго порядка 28
— произведения двух матриц 32
— третьего порядка 28
Оптика 267
Оптическая ось 269
— ось кристалла 285
— разность хода 273
424
Предметный указатель
Оптически анизотропные среды 285
Опыт Юнга 272, 273
Ордината 10
Орт 19
Ортогональные криволинейные
системы координат 413
Освещенность 270
Оси Кёнига 333
Осциллятор линейный гармонический
265
Ось вращения 138
— вращения мгновенная 138
Отражение волн 283
— света полное 267
Отрезок 38
Пар насыщенный 188
— ненасыщенный 189
— переохлажденный 188
Пара сил 316
Парабола 14, 16
Параболоид вращения 28
— гиперболический 28
— эллиптический 28
Парадокс близнецов 166
—. Гиббса 181
Парамагнетики 229, 232
Параметры термодинамические 170
Первая задача динамики 330
Первое начало термодинамики 172
Первообразная 64
Первый закон Ньютона 317
Перемещение 135
Перестановка 123
Пластичность 359
Плечо пары 316
— силы 151, 315
Плоское напряженное состояние 360
Плоскопараллельное движение
твердого тела 308
Плоскость действия пары 316
— поляризации 282
— поляризации волны 263
— фокальная 269
Плотность 144
— вероятности 129, 186
— заряда линейная 198
— заряда поверхностная 198
— заряда пространственная 198
— тока 218
— энергии электрического поля 217
Площадь криволинейного сектора 75
— многоугольника 11
— области на плоскости 75
— поверхности вращения 76
Площадь поверхности, заданной
векторным уравнением 82
— поверхности, заданной уравнением
81
Поверхностное натяжение 192
Поверхностный интеграл второго
рода 89
— интеграл первого рода 88
Поверхность волновая 255
— второго порядка 25
— ориентированная 89
— уровня 57
— эквипотенциальная 204
Повторные интегралы 80
Поглощательная способность тела 291
Погонный угол закручивания 367
Показатель адиабаты 175
— преломления 262, 267
Поле в проводнике 206
— магнитное 199
— однородное 142
— потенциальное 147
— силовое 142
— системы зарядов 200
— скалярное 61
— стационарное внешнее 142
— точечного заряда 200
— тяготения 147, 155
— центральное 142
— электрическое 199
— электромагнитное 199
— электростатическое 147, 199
Полная производная 59
Полуось большая 15
— вещественная 15
— действительная 15
— малая 15
— мнимая 15
Поляризатор 283
Поляризационная призма 286
Поляризация диэлектрика 208
— света 282
Поляризованность 209
Полярная ось 10
Полярный момент инерции 367
— момент сопротивления сечения 368
— радиус 10
— угол 10
Поперечная сила 369
Порядок дифференциального
уравнения 104
— интерференции 273
Последовательность 44
— бесконечно большая 45
— возрастающая 45
Предметный указатель
425
Последовательность монотонная 45
невозрастающая 45
неубывающая 45
ограниченная 44
. стремящаяся к бесконечности 45
— сходящаяся 44
— убывающая 45
Постоянная Больцмана 184
— Верде 287
— Керра 287
— Планка 295
— Стефана— Больцмана 292
Постоянный ток 218
Постулаты СТО 164
Потенциал векторного поля 87
— поля тяготения 156
— проводника 206
— электростатического поля 201
Поток вектора магнитной индукции
226
— вектора напряженности 203
— векторного поля 89
Правила дифференцирования 51
— Кирхгофа 221
Правило Крамера 34
— Ленца 234
— Лопиталя 52, 53
— Максвелла 190
- треугольника 19
— умножения вероятностей 126
Предел 57
— 1-й замечательный 46
— 2-й замечательный 46
— последовательности 43, 44
— пропорциональности 386
— функции 45, 58
— функции слева 46
— функции справа 46
Преломление волн 283
Преобразование координат 16
— Фурье 102, 103
— Фурье обратное 103
Преобразования Галилея 143
— Лоренца 165
Прецессия гироскопа 163
— ларморовская 232
Приближение гироскопическое 163
— Фраунгофера 272
Признак Даламбера 94
— Коши 94
Маклорена— Коши интегральный
94
¦
равномерной сходимости Вейер-
штрасса 96
сравнения второй 93
Признак сравнения первый 93
— сходимости Лейбница 94
— экстремума необходимый 55
Признаки сходимости рядов 93
Принцип возможных перемещений 349
— Гюйгенса 268
— Гюйгенса — Френеля 277
— Даламбера 344
— единственности 208
— обратимости световых пучков 268
— относительности Галилея 143
— относительности Эйнштейна 164
— соответствия 164
— суперпозиции 156, 199, 255
— суперпозиции полей 200
— Ферма 268
Пробный заряд 199
Продольная сила 363
Произведение вектора на число 19
— матриц 31
— матрицы на число 31
— событий 124
Производная 50
— второго порядка 54
— по направлению 61
Произвольное движение твердого
тела 310
Пространство элементарных событий
124
Процесс адиабатический 175
— Джоуля— Томсона 174
— изобарный 175
— изотермический 174
— политропный 175
Прочность 356
Прямой изгиб 369
Прямоугольная система координат
декартова 17
Путь 135
Пучок прямых 13
Работа 146
— внешних сил 146
— выхода 297
— переменной силы 76
Равнодействующая системы сил 315
Радиус кривизны 304
— сходимости 97
Радиус-вектор 19
Разбиение отрезка 72
Разложение определителя по строке
(столбцу) 29
— по системе векторов 37
Размерность вектора 36
Размещение 123
426
Предметный указатель
Разность векторов 19
Разрешающая способность оптиче-
оптических приборов 279
Ранг матрицы 32
— системы векторов 37
Распределение Больцмана 187
— Максвелла 185
— Максвелла — Больцмана 187
Распределенные силы 327
Рассеяние рэлеевское 290
— света 290
Расстояние от точки до прямой 14
Реакция связи 143
Реальный газ 188
Резонанс 251
Рефракция 289
Решение дифференциального
уравнения ltL
— системы линейных уравнений 33
— системы матричное 34
Ротор векторного поля 87
Ряд Маклорена 98
— расходящийся 92
— степенной 97
— сходящийся 92
— сходящийся абсолютно 94
— сходящийся абсолютно на
множестве 95
— сходящийся равномерно 96
— сходящийся условно 95
— Тейлора 98
— функциональный 95
— Фурье 100, 245
— Фурье в комплексной форме 101
— Фурье по косинусам 101
— Фурье по синусам 101 ,
— числовой 92
Самоиндукция 236
Свет естественный 283
— поляризованный 282
Светимость 270
Световые кванты 296
Свободная энергия 179, 182
Свойства бесконечно малых и
бесконечно больших функций 47
— векторного произведения 21
— двойного интеграла 79
— модуля вектора 36
— неопределенного интеграла 65
— непрерывных функций 48
— определенного интеграла 73
— пределов 46
— равномерно сходящихся рядов 96
— скалярного произведения 19, 21
Свойства степенных рядов 97
— сходящихся последовательностей
44
— сходящихся рядов 93
— тройного интеграла 83
— электромагнитных волн 261
Связь геометрическая 347
— голономная 347
— дифференциальная 347
— идеальная 349
— кинематическая 347
— механическая 346
— неголономная 347
— неосвобождающая 347
— нестационарная 347
— освобождающая 347
— стационарная 347
Сегнетоэлектрики 213
Сила 141, 314
— Ампера 223
— внешняя 356
— вынуждающая 251
— источника энергетическая 270
— квазиупругая 213
— Кориолиса 159
— коэрцессивная 233
— критическая 383
— Лоренца 223
— обобщенная 246
— поверхностного натяжения 192
— поперечная 369
— потенциальная 342
— продольная 363
— равнодействующая 141
— реактивная 146
— результирующая 141
— света источника 270
— сопротивления движению 143
— сосредоточенная 356
— сухого трения 143
— тока 218
— тяжести 142
— упругости 142, 147
— центробежная 159
Силовые линии 204
— факторы 357
Силы активные 315, 329
— внешние 332
— внутренние 332, 356
— инерции 158, 344
— консервативные 147
— нормального давления 328
— распределенные 356
— реакций связей 315, 329
— трения покоя 328
Предметный указатель
427
Синус 41
Синус-преобразование Фурье 104
Синусоида 41
Система векторов линейно зависимая
37
.— векторов линейно независимая 37
— векторов ортонормированная 37
двухфазная 190
— консервативная 147
— координат декартова прямоуголь-
прямоугольная 10
— координат полярная 10
— координат сферическая 18
— линейных дифференциальных
уравнений 116
— линейных уравнений 33
— неопределенная 33
— несовместная 33
— определенная 33
— параллельных сил 321
— разрешенная 34
— сил плоская 321
— сил сходящаяся 320
— совместная 33
— трехфазная 191
Системы n-мерных векторов 37
— координат ортогональные
криволинейные 413
— обыкновенных дифференциальных
уравнений 115
— уравнений равносильные 34
Скалярное произведение 19, 36
Скачок функции 49
Скорость 135
— абсолютная 312
— групповая 258
материальной точки 135
— относительная 312
— переносная 139, 312
релятивистская 164
— средняя квадратичная 184
фазовая 258
электромагнитных волн в вакууме
Сложная функция 39
Сложное движение точки 311
~7 сопротивление 377
Случайная величина 128
Омачивание 193
полное 194
Смесь идеальных газов 185
умешанное произведение 20, 21
ной геометрический
<-мысл производ:
51
производной физический 51
Собственные векторы матрицы 36, 37
— значения матрицы 36, 37
Событие достоверное 124
— невозможное 124
События несовместные 125
— равносильные 125
Совмещение событий 124
Сопротивление активное 253
— емкостное 253
— индуктивное 253
— полное 253
— проводника 219
— реактивное 253
Состояние равновесное 170
Сочетание 124
Спектральное разложение 269
Специальная теория относительности
164
Способы задания функции 38
Сравнение бесконечно малых 47
Среднеарифметическая скорость 187
Среднее квадратичное отклонение
130
Средняя скорость 187
Статика 318
Степенной ряд 97
Степень свободы 135
Сумма векторов 19
— двух матриц 31
— интегральная 73, 79, 83
— ряда 92
— событий 124
Суперпозиция функций 39
Сферическая система координат
18, 415
Сферическое движение 311
Тангенс 42
Твердое тело 138
Температура кипения 191
— критическая 188
— Кюри 213, 233
Теорема Абеля 97
— Бернулли 131
— Вариньона 317
— взаимности 237
— Гаусса 203
— Гаусса для магнитного поля 227
— Гаусса для электрического
смещения 210
— Гюйгенса о моментах инерции 334
— Ирншоу 205
— Кёнига 147
— Карно 176
— Коши 53
428
Предметный указатель
Теорема Кронекера— Капелли 33
— Лагранжа 53
— Нернста 181
— о взаимно перпендикулярных осях
161
— о главных осях инерции 163
— о кинетической энергии 147, 343
— о модуле интеграла 74, 80, 83
— о параллельном переносе силы 318
— о приведении системы сил к
центру 319
— о результирующей паре сил 318
— о скоростях при сложном движе-
движении точки 312
— о скоростях точек плоской фигуры
309
— о среднем 74, 80, 83
— о суперпозиции частных решений
113
— об изменении количества движе-
движения 336
— об интегрировании неравенств 74
— об оценке 74, 80, 83
— об ускорениях при сложном
движении точки 312
— об ускорениях точек плоской
фигуры 310
— об эквивалентности систем сил,
приложенных к твердому телу 319
— Ролля 52
— сложения вероятностей 126
— существования и единственности
105, 109
— Чебышева 131
— Штейнера 161
Теоремы о дифференцируемых
функциях 52
— статики 318
Теория вероятностей 123
— относительности общая 159
— относительности специальная 164
Тепловое излучение 290
Теплоемкость 173
— молярная 175
— удельная 175
Теплообмен 180
Теплота 172
Термодинамика 170
— неравновесная 171
— равновесная 171
Термодинамический потенциал
Гиббса 182
Термодинамический потенциал
удельный 182
Ток конвекционный 218
Ток проводимости 218
— смещения 238
Тормозное рентгеновское излучение
298
Точечные множества 57
Точка граничная 57
— критическая 55, 62
— максимума 62
— минимума 62
— множества внутренняя 57
— перегиба 54
— разрыва второго рода 49
— разрыва первого рода 48
— разрыва функции 48
— условного максимума 63
— условного минимума 63
— устранимого разрыва 49
— экстремума 62
Точки скорость 302
— ускорение 302
Траектория 302
Третий закон Ньютона 317
Третье начало термодинамики 181
Тригонометрические функции 388
Тройная точка 191
Тройной интеграл 79, 82
Угловая дисперсия 281
Угол Брюстера 284
— закручивания 367
— между векторами 20
— между вектором и осями коорди-
координат 20
— между прямыми 13
Удельная проводимость 219
— теплоемкость 175
Удельное сопротивление 219
Ультрафиолетовая катастрофа 294
Упругие волны 254
Упругость 359
— линейная 359
Уравнение Бернулли 108
— в полных дифференциалах 108
— Ван-дер-Ваальса 188, 189
— волновое 256
— вынужденных колебаний 251
— гармонических колебаний 243
— гиперболы каноническое 15
— движения 141
— затухающих колебаний 249
— касательной 51
— касательной плоскости 61
— Клапейрона—Клаузиуса 191
— кривой второго порядка 16
— кривой второго порядка общее 17
Предметный указатель
429
Уравнение линии 11
. Майера 175
. Мещерского 146
— окружности 14
первого порядка 105
плоской гармонической волны 255
плоскости общее 22
— поверхностей второго порядка
каноническое 26
— прямой в отрезках 12
— прямой общее 12
— прямой с угловым коэффициентом
13
-^- прямой, проходящей через две
данные точки 14
— Пуассона 175, 205
— с разделенными переменными 106
— с разделяющимися переменными
106
— состояния 171
— состояния калорическое 172
— состояния термическое 172
— Циолковского 146
— Эйнштейна 298
Уравнения движения плоской фигуры
308
— Лагранжа второго рода 351
— Максвелла 238
— Максвелла в вакууме 239
— Максвелла в среде 240
— Максвелла в электростатике 205
— Максвелла для постоянного
магнитного поля 228
— моментов сил 320
— проекций сил 320
— равновесия стержня 369
равновесия твердого тела 319
— связей 314
Уравновешенная система сил 315
Ускорение абсолютное 312
— касательное 302
— кориолисово 140, 313
материальной точки 135
— нормальное 136, 302
относительное 312
переносное 312
~ свободного падения 156
— тангенциальное 136, 302
центростремительное 137 *
Условие Вульфа— Брегга 282
параллельности (коллинеарности)
Двух векторов 20
параллельности плоскостей 23
параллельности прямой и плоско-
плоскости 24
Условие параллельности прямых 13
— перпендикулярности двух векторов
20
— перпендикулярности плоскостей 23
— перпендикулярности прямой и
плоскости 25
— перпендикулярности прямых 13
— прочности Сен-Венана 382
Условия Дирихле 100
— Лауэ 282
— прочности Мизеса 382
— прочности балок 376
— равновесия фаз 190
— существования экстремума 55
— экстремума достаточные 55, 62
— экстремума необходимые 62
Условная вероятность 126
Устойчивость сжатых стержней 383
Фазовый переход 190
— переход второго рода 192
— переход первого рода 191
Ферромагнетики 229, 232
Фигуры Лиссажу 245
Физическая кинетика 171
Физический маятник 247
Фокус параболы 16
— оптической системы 269
— эллипса 14
Фокусное расстояние 14
Формула барометрическая 187
— Бейеса 127
— Бернулли 127
— Больцмана 181
— Вина 293
— Грина 91
— Дебая — Ланжевена 213
— Журавского 375
— конечных приращений 53
— Лапласа 193
— Лорентц — Лоренца 289
— Маклорена 54
— Муавра 390
— Муавра — Лапласа интегральная
128
— Муавра — Лапласа локальная 128
— Ньютона — Лейбница 75
— Остроградского—Гаусса 90
— Планка 294
— полной вероятности 127
— Пуассона 128
— Рэлея — Джинса 293
— Симпсона 122
— Стокса 91 •
— Тейлора 54, 60
430
Предметный указатель
Формула трапеций 121
— Эйлера 384, 390
Формулы прямоугольников 121
— Френеля 282
— Эйлера 311
Фотометрия 269
Фотон 297
Фотоэффект 296
Фронт волны 255
Функции бесконечно малые эквива-
эквивалентные 47
— дифференцируемые 58
— обратные тригонометрические 42
— одинакового порядка 47
— элементарные 39
Функциональный ряд 95
Функция Лагранжа 63
— бесконечно большая 47
— бесконечно малая 47
— более высокого порядка малости
48
— возрастающая 39
— двух переменных 57
— дифференцируемая 50
— интегрируемая 73
— квадратичная 119
— линейная 119 '
— логарифмическая 41
— монотонная 39
— невозрастающая 39
— непрерывная 48, 58
— непрерывная на множестве 58
— непрерывная слева 48
— непрерывная справа 48
— неубывающая 39
— обратная 39
— ограниченная 57
— подынтегральная 65
— показательная 40
— распределения 128
— распределения дискретная 129
— распределения непрерывная 129
— рациональная 68
— сложная 59
— степенная 39
— трех переменных 57
— тригонометрическая 41
— убывающая 39
Характеристическое уравнение
38, 112
Химический потенциал 182
Центр кривизны 304
— масс 144, 333
— параллельных сил 326
— тяжести 152
— тяжести твердого тела 326
Центральное растяжение 363
— сжатие 363
Цикл Карно 175
Цилиндр 28
Цилиндрическая система координат
415
Цилиндрические координаты 18
Циркуляция 87
— вектора магнитной индукции 226
— магнитной индукции 226
Цуг волн 274
Частичная сумма ряда 92
Частная производная 58
— производная вторая 60
— производная смешанная 60
Частное приращение 58
— решение 105, 109, 116
Частный интеграл дифференциально-
дифференциального уравнения 105
Частота 125
— колебаний 243
Число Авогадро 170
— степеней свободы 184, 348
Числовая ось 38
Числовой ряд 92
Числовые множества 38
Чистый сдвиг 361
Член остаточный 54
Шкала температур термодинамиче-
термодинамическая 177
— электромагнитных волн 266
ЭДС (электродвижущая сила) 220
— Взаимной индукции 237
— самоиндукции 236
Эквивалентные системы сил 315
Эквипотенциальные поверхности 204
Экстремум 54, 55
— функции двух переменных
условный 63
— функции многих переменных
условный 64
— функции трех переменных 63
Эксцентриситет гиперболы 15
— эллипса 15
Электрическая постоянная 198
Электрический диполь 198
Предметный указатель
431
Электрический заряд 197
— ток 218
Электрическое поле 199
смещение 209
Электродинамика 197
Электроемкость конденсатора 214
проводника 206
Электромагнитная индукция 234
Электромагнитные волны 261
Электронная теория металлов 222
Электрооптический эффект Керра
287
Электростатическое поле 199
Элементарная работа 340
Элементарное событие 124
Элементарные функции 39
Элементы матрицы 31
— определителя 30
Эллипс 14
Эллипсоид 26
— вытянутый 28
— сплюснутый 28
Эллиптический параболоид 28
Энергия внутренняя 149> 172
— идеального газа внутренняя
174, 184
— кинетическая 147, 342
— конденсатора 216
— покоя 168
Энергия потенциальная 148
— потенциальная эффективная 154
— релятивистская 168
— системы зарядов 215
— системы механическая 149
— собственная механическая 149
— уединенного проводника 216
— электромагнитных волн 263
— электростатического поля 215
Энтальпия 174
Энтропия 179
— газа Ван-дер-Ваальса 179
— идеального газа 179
— смешения 181
Эпюра 364
Эффект Доплера в акустике 261
— Доплера для электромагнитных
волн в вакууме 265
— Комптона 299
— Коттона—Мутона 287
— Холла 233
Эффективная потенциальная энергия
154
Явления капиллярные 194
Ядро сечения 380
Якобиан 81, 84
Яркость 270
Справочное издание
ПОЛЯНИН Андрей Дмитриевич
ПОЛЯНИН Владимир Дмитриевич
ПОПОВ Владимир Александрович
ПУТЯТИН Борис Владимирович
САФРАЙВладимир Михайлович
ЧЕРНОУЦАН Алексей Игоревич
КРАТКИЙ СПРАВОЧНИК ДЛЯ ИНЖЕНЕРОВ И СТУДЕНТОВ
Компьютерная верстка А. И. Журов
Корректор О. А. Бутусова
Подписано к печати с оригинал-макета 15.02.96.
Формат 60x90/16. Бумага кн.-журн. Усл. печ. л. 27.
Уч.-изд. л. 27. Тираж 20 000 экз. Заказ № 2803.
«Международная программа образования»
Отпечатано с готовых фотоформ в ГУИПП «Курск».
305007 г. Курск, ул. Энгельса, 109.