














































































































































































Text
Пропаже ч< подлежит
ВНИМАНИЕ! Нет 1-го листа - стр.100 - 101
4РТИДДЕРМ йскоГ
и БОМБАРДИРОВОЧНОЕ
^ВООРУЖЕНИЕ______
УЧЕБНИК
МЕХАНИКА
ВОЕННО-
ВОЗДУШНЫХ
СИЛ
4k
*
Ордена Трудового Красного Знамени
ВОЕННОЕ ИЗДАТЕЛЬСТВО
МИНИСТЕРСТВА ОБОРОНЫ СССР
МОСКВА 1068
Т | УПРАВЛЕНИЙ главнокомандующего '
. ВОЕННО-ВОЗДУШНЫМИ СИЛАМИ
УЧЕБНИК
МЕХАНИКА
ВОЕННО-ВОЗДУШНЫХ
СИЛ
АРТИЛЛЕРИЙСКОЕ
И БОМБАРДИРОВОЧНОЕ ВООРУЖЕНИЕ
Ордена Трудового Красного Знамени
"ВОЕННОЕ ИЗДАТЕЛЬСТВО
МИНИСТЕРСТВА ОБОРОНЫ СССР
МОСКВА—1968
lif'Sf: Принципы работы систем артд^д
...iHO'ro вооружения летательных аЫд£дт<?&-;
>1^Й№№' принципы устройства н.-Деда?гвий
ПрИПасЬВ. . ''к '
Учебник предназначен для- механиков ВВС, обслужйвафй$йк|
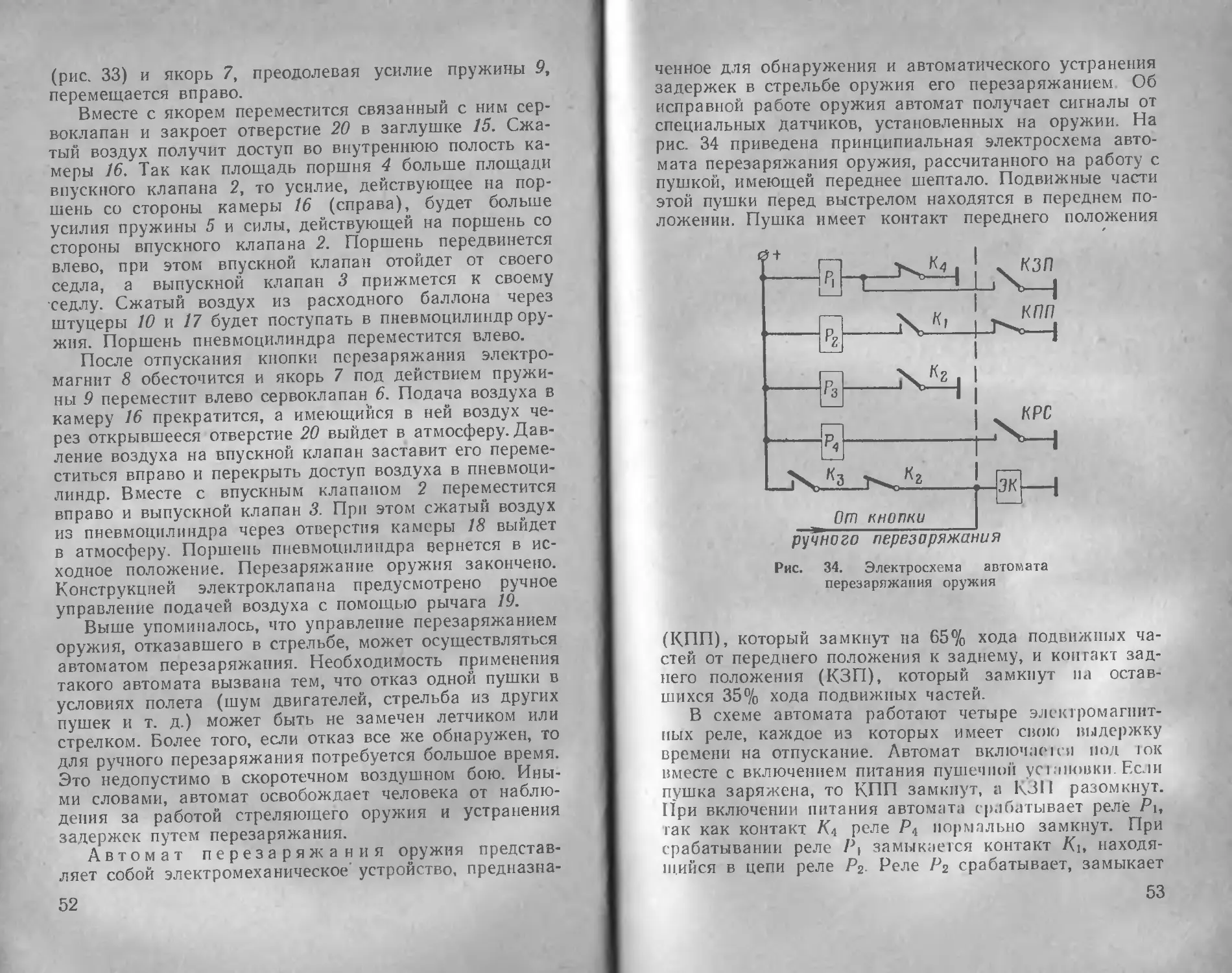
авиационное вооружение. 6н waiter Шть полезен и другим
цнонным специалистам, • -
Учебник написан коллектйвом авторов Я отредактирован-
дидатом технических наук инженер-подполковником С-M
в ы м В. М. . ' ” ,
Главы I и II йапцсаны Нырковым Г. Г.; введение и г* '
III — кандидатом технических наук инженер-подполковником Смд^рГ*
новым В. М.; глава .lV-т-* Доктором технических наук инжедей^\ц
полковником МубДр.акшиным- Р. В.; глава V — кандидатов!.'^
технических наук инженер-полковником Балуевым В. М.; глааф^
VI—Знаменским Ю. П-;,. глава VII—доктором технически’!
наук генерал-маЙо^Ьй итс Зенкевичем Н. И.;" глава VlII;,rr-
. женер-подйолкбвнидом 3 а й пев ы м А. П-; '
датой технических наукйнженер-полковником Л <$ро фтё'ёВыгм
2
... ВВЕДЁН ИВ
<•- •.,. •' I-:' X
Авиационное вооружение появилось вместе <с.-в$Й1$£
ми самолетами. .Оно совершё<|ствоваМсь по. мере
тия боевой авиации. В начале первой мировой врйиык:
воююфие страны поняли^ что; ,боевИ! авиация
решать самостоятельные задачи. Начался период вЬор$|;
жения самолетов. К концу 1916 |йЦ|1^ия: <?тала ПОД*Й
разделяться на бомбардировочную,
рааведывательную. ' .:' > , Ч)
На ^самолетах-бомбардировщиках устаййВЛи)^й^й(^|
, простейшие приспособления для подвески и
НИИ авиационных бомб и приспособления для
пулеметов. В качестве оружия использовались
Пулеметы, состоявшие на вооружении пехоты. Тяжелый^
бомбардировщик «Илья Муромец» мог поднимать ДО-
600 кв бомб. Стрелковое вооружение самолета состояло
И9 0--8 пулеметов.
Самолеты-истребители вооружались станковыми пу-
леметами, установленными, как правило, в фюзеляже;!
самолета. Для обеспечения стрельбы через плоскость,
вметаемую винтом самолёта, на пулеметы устанавливай
Вален синхронизатор, которой согласовывал стрельбу с J
iipnlHviiHCM винта.
Для увеличения эф стрельбы по воздуш-^
ным и наземным целям йа’ т-истребитель ц . ,(1
установить пехотнуЮ Ш^^Ьбнную ‘ пушку
37 мм. Однако попытка .Лййй^ись неудач^ЛШ^В<8Й§^
пушка обладала большой силой отдачи и малой скоро-
стрельностью.
После Великой Октябрьской социалистической рево-
люции началось бурное развитие отечественной про-,
мышленности, в том числе и авиационной. Советские
ученые, конструкторы и инженеры приложили много уси-
лий для развития отечественной авиации. К началу- Ве-
ликой Отечественной войны советская авиация распо-
лагала первоклассными боевыми самолетами и совер-
шенным авиационным вооружением.
Серийные авиационные пулеметы и пушки обладали
малым весом и большим- темпом стрельбы. Для них
были разработаны механизированные артиллерийские
установки, обеспечивающие необходимую зону обстре-
ла. Бомбардировочное вооружение самолетов позволяло
подвешивать на самолет бомбы различных типов и ка-
либров. Бомбовая нагрузка некоторых самолетов-бом-
бардировщиков предвоенного времени достигала 4—5 т.
В конце 30-х годов на вооружение истребительной авиа-
ции были приняты неуправляемые авиационные ракеты
с пороховыми двигателями.
В ходе Великой Отечественной войны авиационное
вооружение с честью выдержало тяжелый экзамен., Вы-
сокая боевая эффективность оружия "и средств пораже-
ния, сочетающаяся с высокой надежностью, обеспечи-
вала успешное выполнение задач, стоявших в те годы
перед советской авиацией.
Опыт войны позволил наметить пути дальнейшего
развития авиационной техники. Вместе с появлением
реактивной, авиации появляются новые системы авиа-
ционного вооружения. Они отличаются от старых си-
стем Высокой степенью автоматизации процессов прице-
ливания и управления оружием. На вооружение -авиа*
ции поступили управляемые ракеты «воздух—воздуху
и «воздух-т-земля». • . <4^
4
Летательный аппарат является носителем средств
нападения и средств защиту. Средства нападения поз-,
вол я ют боевой авиации наносить материальный ущерф
противнику. К средствам нападения, устанавливаемым
па летательных аппаратах, относятся оружие, прицелы,
и средства поражения. Средства защиты обеспечивают
выполнение основной задачи. К ним относятся устрой-
ства для создания пассивных и активных помех, сред-
ства противорадиолокационной маскировки и оборони-
тельное оружие.
Средства нападения и некотр^ые средства защиты
входят в состав авиационного вооружения. В общей
случае к авиационному вооружению относят;
— все виды оружия, устанавливаемого на летател^-
пых аппаратах;
- — установки оружия с" их системами управления;
— прицельные и бортовые вычислительные устрой-
ства систем вооружения;
— средства создания пассивных помех;
— десантное оборудование самолетов;
— авиационные средства поражения и различные
авиационные пиротехнические средства;
— аппаратуру контроля и прогнозирования состоя-
ния авиационного вооружения;
— тренажеры и аппаратуру обучения летного соста-
ва применению авиационного вооружения;
— средства подготовки авиационного вооружения.
Современное авиационное вооружение летательных
Аппаратов подразделяется на артиллерийское, бомбар-
дировочное и ракетное. Артиллерийское вооружение
включает авиационные пушки и пулеметы, артиллерий-
ские установки, прицелы воздушной стрельбы и бое-
припасы авиационных пущек и пулеметов. В бомбарди-
ровочное вооружение входят: бомбардировочные уста-
новки, прицелы бомбометания и бомбардировочные
средства поражения (авиационные бомбы, мины, трр-
5
% *
педы и в^м||тели к ним).
тельных аппаратов £ОстоиХ;03'.,^йЙ^^''УеШ^Р^^1^':
цельный устройств и упрШ!яеМык?иЛи йёУйр®йОШ^|1
ракет. , . .'?<*' -' Члж
г- Ниже рассматриваются принципы устройства и Йй«|&
торые типовые схемы агрегатов и систем современного
артиллерийского и бомбардировочного вооружения сШ
молетоВ. ' с-
6
АРТИЛЛЕРИЙСКОЕ
самолетов
-.г -?/ " , .,
"' * I-.1'"' «Л ' . (. "' .JfyiJ'liwjfl .11-?•
ГЛАЙА I :
АВИАЦИОННЫЕ ПУШКИ И ПУЛЕМЕТЫ
§ 1. ОБЩИЕ СВЕДЕНИЙ
Артиллерийское во ору жейй е, несмфря на :
Наличие па самолетах других видов вооружения,' НМ?
пример ракетного, устанавливается почти на всех типах,
самолетов. . v
Артиллерийское вооружение самолетов предиаэначе- >'
ИО ДЛЯ поражения воздушных и некоторых наземных л
целей II может применяться как самостоятельно^ так ,.й-й
И еочеганкн с другими видами вооружения’ сазйолетд?.
(ракетным, бомбардировочным).
Лрп1ллерпйское вооружение самолетов-истребителей?
обычно включает пушки калибра 23—37 мм, устанавЛЖ?
Веемые неподвижно в передней части фюзеляжа, авто?-?
магический или полуавтоматический прицел, а также фо-
Токонтрольную аппаратуру.
Артиллерийское вооружение самолетов-бомбардиров-
щиков состоит из одной или нескольких подвижных пу-
шечных установок (передняя, кормовая, верхняя, ниж- 1
пни, блистерная). На . каждой установке монтируется
одна две пушки калибра 23 мм; управление установи?
нами обычно дистанционное. Некоторые самолеты-бом- ;
бард ирон Шики имеют также и неподвижные установки.
Ирине'шванне при воздушной стрельбе обеспечи-
вается ивтоматическими Илц полуавтоматическими при-
целами. Для контроля йрафйьности прицеливания y£Jfsl
панливается фотоконТ(^ЫЙМ аппаратура.
Артиллерийское Вооружение вертолетов и учебных?
самолетов включа$т?Й^Д«меты, Обычно калибра
простейшие* коллиматорные или- полуавтоматические
прицелы и фотоконтрольную аппаратуру.. х
Эффективность артиллерийского оружия самолета
зависит от количества снарядов, попавших в цель, и от
их разрушающего действия. Количество попаданий в
свою очередь зависит от количества пушек, их скоро-
стрельности и точности прицеливания.
Разрушающее действие снарядов зависит от тира
снаряда, его веса, типа взрывателя, а также, от скоро-
сти снаряда при встрече с целью.
Баллистикой называется наука, изучающая двн-'
жение снаряда. При стрельбе из оружия в движении
снаряда различают два Основных периода:
— движение снаряда в стволе оружия под дейст-
вием пороховых газов;
— движение снаряда в воздухе с момента полного
прекращения действия на снаряд пороховых газов.
Поэтому баллистика делится на две основные ча-
сти— на внутреннюю и внешнюю. В этой главе рас-
сматриваются элементы только внутренней баллистики.
Элементы внешней баллистики рассмотрены в главе IV.
Внутренняя баллистика занимается изучением процес-
сов, .происходящих в канале ствола оружия при выстре-
ле, определением законов изменения давления порохо-
вых газов и скорости движения снаряда по каналу
ствола.
Во время выстрела химическая энергия порогового
заряда превращается в тепловую, а тепловая — в ме-
ханическую энергию — в движение системы: снаряд—
заряд—оружие, т.'е. снаряд получает поступательное И.
вращательное движение, а пушка при выстреле откаты-
вается назад. « „
Процесс выстрела начинается с момента удара бой-
ка затвора по капсюлю патрона. От удара бойка кап-
сюльный состав воспламеняется и воспламеняет поро^
ховой заряд, при горений которого за 0,001-- 0,003 сек
образуется большое количество сильно нагретых газов’
создающих внутри гильзы большое давлением. Давле-
нием пороховых газов на дно (рис. 1) снаряд рытая-;
кивается из Корпуса гильзы; врезается, ведущим пэд^.
ком в нарезы ствола и начинает ускоренное дрижЙН^'
Давление газов, при котором снаряд - наедйает'
гаться по каналу ствола, называется давлением форсж^-
8 . ' -
рования Ро. Оно достигает, в зависимости от типа ору<
жпя, 250—500 кГ1см2.
Поскольку скорость снаряда вначале невелика, дав*
лепие и температура пороховых газов быстро нара-
стают, и к моменту сгорания около половины, заряда
давление достигает своего максимума (Рм), равного
примерно 3000 кГ/см?, а температура доходит до 2500—
3500° С.
Р К
КГ/CmZ м/ср.к
Рис. 1. Диаграмма давления пор&ховЫх газов и скоро-,
ста движения снаряда в канале ствола:
Ро — давление форсирования; Рм — максимальное давление:
Ра — давление в момент вылета снаозда; — начальная ско-
рость снаряда; — максимальная скорость снаряда
Дальнейшее горение заряда уже не может повысить
давления пороховых газов внутри заснарядного про-
странства, так как прирост образующихся пороховых
гп.тов оказывается недостаточным, чтобы скомпенсиро-
вать увеличение объема заснарядного пространства.
Поэтому давление и температура поррховых газов, до-
стигнув своего максимума, постепенно начнут падать и
и момент вылета снаряда из канала ствола давление Рд
будет около 600—700 кПсм'г и температура око-
ло 1500° С.
Изменение давления газов в канале ствола, а сле-
допвтельно, и скорости снаряда зависит от свойства по-
рохи и формы его зерен. Различают пороха с постоян-
ной, уменьшающейся и увеличивающейся поверхностью
юрения (рис. 2),
При горении пороха с постоянной поверхностью го-
рения приток газов остается постоянным, с уменьшаю-
щейся поверхностью — уменьшается (дегрессивное горе-
ние), а с увеличивающейся поверхностью — все время
возрастает (прогрессивное горение).
Рис. 2. Виды порохов;
a — порох с уменьшающейся поверхностью горения; б — порох с увеличиваю-
щейся поверхностью горения
Прогрессивное горение порохового заряда позволяет
получить большую начальную скорость снаряда при за-
данном максимальном давлении пороховых газов. По-
этому для авиационного оружия применяются в основ-
ном многоканальные пороха, обеспечивающие прогрес-
сивное горение (рис. 2,6).
Газы, выходя из канала ствола и расширяясь, еще
оказывают на снаряд свое действие, незначительно уско-
ряя его движение. Это явление называется последейст-
вием газов. Из рис. 1 видно, что скорость движения
снаряда за время действия на него пороховых газов
непрерывно возрастает и в конце действия их достигает
наибольшего значения vM. Скорость снаряда в момент
вылета из канала ствола называется начальной
скоростью* и0- Для современных образцов авиацион-
ного оружия она достигает примерно 700—1000 м/сек.
Начальная скорость снаряда является одной из важ-
нейших характеристик оружия Чем больше эта ско-
* В начальную скорость снаряда о0 (при расчете траектории
снаряда) включается и приращение скорости снаряда в результате
последействия газов.
10
рость, тем больше кинетическая энергия снаряда. Ки-
нс i плеская энергия снаряда в момент вылета его из ка-
п.। и ствола называется дульной энергией оружия. Ее
величина
где т— масса снаряда, кг;
Т'о — начальная скорость снаряда, м/сек.
Цульная энергия является главной характеристикой
мощности оружия. Как видно из формулы, эта энергия
ынпсиг от массы снаряда и главным образом от его на-
чальной скорости.
При движении снаряда по каналу ствола вперед дав-
ление in юн сообщает стволу движение назад (откат).
В период последействия скорость движения ствола воз-
растет. Явление движения оружия назад называется
о । д а ч с й.
Г.1К как движение снаряда и оружия осуществляется
под действием одной и той же причины — давления по-
роховых га юв в канале ствола, то количества движения
пир» и н оружия будут равны, т. е.
/мг/0 = 2ИУ, (2)
I чс At — масса оружия, кг;
V скорость огкага оружия, м/сек.
( ле 1ова1елыю, скорость отката
V = (3)
I i in учес।ь выброшенную часть порохового заряда
(примерно половину всего заряда) и воздействие исте-
чения । а юн, получим
V = (4)
। ie i" мнеса порохового заряда, кг;
[1— коэффициент последействия, учитывающий влия-
ние истечения газов.
Кинетическая энергия оружия, приобретенная им при
пы< ।реле, гасится силой сопротивления противооткатных
V ipoiicTB и узлов крепления/Для одиночного выстрела
11
можно принять, что кинетическая энергия отдачи равна
работе, потраченной на деформацию пружин и узлов
крепления оружия при движении его назад, и сопротив-
ление противооткатных устройств постоянно на всем
пути отката. В этом случае можно записать, что
откуда
n W2
2S ’
где Р—сила отдачи, н\
S—величина отката, м.
Подставив значение V из формулы (4), получим:
(/я + 0,5 up)2 vjj
Р ~ IMS ’
Таким образом, сила отдачи прямо пропорциональна
начальной скорости снаряда, массам снаряда и порохо-
вого заряда, но обратно пропорциональна массе ору-
жия (его откатывающихся частей) и величине отката
оружия.
§ 2. ПРИНЦИПЫ ДЕЙСТВИЯ АВИАЦИОННОГО ОРУЖИЯ
Авиационные пушки и пулеметы проектируются с
учетом особенностей воздушной стрельбы, размещения
и эксплуатации их на самолетах.
Авиационное оружие является автоматическим, и все
операции, связанные с подготовкой и производством
очередного выстрела, производятся за счет энергии по-
роховых газов, образующихся при выстреле.
По способу использования энергии пороховых газов
различают оружие, работающее на энергии отдачи,
энергии газов, отводимых через отверстие в стенке ство-
ла, и работающее одновременно на энергии отводимых
газов и энергии отдачи.
Известно, что во время выстрела канал ствола ору-
жия закрывается затвором. В зависимости от связи за-
твора со стволом оружие, работающее на энергии
отдачи, подразделяют на оружие с отдачей ствола и ору-
жие с отдачей затвора. Основные данные некоторых об-
разцов оружия приведены в приложении 1.
12
В оружии с отдачей ствола (рис. 3) в момент
выстрела затвор 1 соединен со стволом 2. Под дейст-
вием давления пороховых газов на дно гильзы затвор
движется назад вместе со стволом. После вылета сна-
ряда из канала ствола затвор отсоединяется от ствола
Рис. 3. Схема оружия, работающего на энергии
отдачи:
1 — затвор; 2 — ствол; 3 н 4 — пружины; б — ускоритель
и выбрасывает стреляную гильзу. В лапки затвора по-
дается очередной патрон. Движение ствола и затвора
вперед происходит под действием возвратных пружин 3
и 4.
В зависимости от величины отката ствола различают
оружие с длинным и коротким ходом ствола. В оружии
с длинным ходом ствола затвор и ствол вместе дви-
жутся до крайнего заднего положения. В оружии с ко-
ротким ходом ствола расцепление затвора и ствола про-
исходит до прихода затвора в крайнее заднее положе-
ние. Оружие этого типа работает в такой последова-
юльности.
Перед стрельбой затвор с патроном удерживается
одиночным шепталом в заднем положении. При поступ-
лении тока в электроспуск одиночное шептало утапли-
вается и затвор начинает двигаться вперед под дейст-
вием возвратной пружины. В крайнем переднем поло-
жении затвор останавливается пеньком ствола и пово-
рачивается вокруг продольной оси. При повороте
атвора его боевые упоры входят в зацепление с бое-
выми упорами ствольной коробки, затвор запирает ка-
пал ствола. После этого боек накалывает капсюль и
происходит выстрел.
11од действием пороховых газов одновременно с дви-
жением снаряда по каналу ствола начинается откат
г тола со ствольной коробкой и затвором. При откате
«штор от агрегата ствола через рычажный ускоритель 5
получает увеличенную по сравнению со стволом ско-
13
рость Вследствие этого происходит отпирание ствола и
извлечение стреляной гильзы.
При дальнейшем откате агрегат ствола специальным
приводом перемещает патронную ленту на величину
шага звена и очередной патрон оказывается перед
входным окном кожуха. В конце отката агрегат ствола
тормозится гидробуфером. Накат ствола происходит
под действием пружин буфера, сжатых в результате от-
ката. При накате ствола досылатель снижает очередной
патрон в лапки затвора, выталкивая им стреляную
гильзу.
В конце наката агрегат ствола выключает автома-
тическое шептало и через ускоритель наката увеличи-
вает скорость запирающего агрегата с очередным пат-
роном в затворе. Применение ускорителей отката и на
ката сокращает время движения запирающего агрегата
и увеличивает тем самым темп стрельбы пушки.
Отдача ствола использована в конструкции пу-
шек НР-23 и Н-37Д.
В оружии с отдачей затвора при стрельбе
ствол неподвижен. Под действием пороховых газов на
дно гильзы движется назад только затвор. Он извле-
кает стреляную гильзу, подает очередной патроп в па-
тронник и производит выстрел. Движение затвора впе-
ред происходит под действием его возвратной пружины.
Характерными признаками оружия, работа которого
основана на использовании энергии пороховых газов,
отводимых из канала ствола через специальные отвер-
стия, являются: жесткое соединение ствола с кожухом,
прочное сцепление затвора со стволом во время выстре-
ла, наличие отверстия в стенке ствола и специальной
газовой камеры, обеспечивающих отвод пороховых га-
зов и действие их на поршень оружия. Оружие этого
типа работает в такой последовательности (рис. 4).
Рис. 4. Схема оружия с отводом газов:
1 — снаряд; 2 — отверстие; 3 — поршень; 4 — ползун; 5 — затвор;
б ~ пружина
14
Перед началом стрельбы подвижные части оружия
находятся в крайнем переднем положении, патрон — в
патроннике, закраина гильзы — в пазах затвора, удар-
ник — на боевом взводе и удерживается электрошепта-
лом. При подаче тока в электроспуск электрошептало
утапливается, ударник освобождается и бойком наносит
удар по капсюлю патрона. Под действием пороховых
газов снаряд 1 начинает двигаться по каналу ствола.
После прохождения снарядом газового отверстия 2
в стенке ствола часть пороховых газов устремляется
через это отверстие в газовую камеру и давит на пор-
шень 3, отбрасывая его вместе с ползуном 4 назад.
Ползун при своем движении скосами опускает затвор 5
и тем самым отпирает канал ствола. При движении за-
твора назад гильза (патрон) извлекается и, скользя по
наклонным гребням отражателя, выбрасывается из
оружия.
Дойдя до крайнего заднего положения, подвижные
части под действием поджатых буферных и возвратной
пружин 6 начинают двигаться вперед. Досылатель под-
водит очередной патрон из приемного окна в патронник.
После входа патрона в патронник зуб досылателя за-
скакивает за закраину гильзы, а затвор, поднятый пол-
зуном, запирает канал ствола. При движении затвора
вверх ударник сначала задерживается на автошептале,
но при дальнейшем движении затвора оно отключается
и ударник становится на электрошептале; оружие го-
тово к очередному выстрелу.
Для поддержания темпа стрельбы в нормальных
пределах оружие снабжено газовым регулято-
р о м. Его перестановкой можно менять диаметр отвер-
стия в стенке ствола и регулировать количество газов,
поступающих в газовую камеру, т. е. изменять их дав-
ление на поршень.
Энергия газов, отводимых из канала ствола, исполь-
зуется в конструкции пулемета А-12,7.
Характерными признаками оружия, работа которого
основана на одновременном использовании энергии от-
дачи и энергии пороховых газов, отводимых через отвер-
стие в стенке ствола, являются: подвижный ствол, откат
подвижных частей автоматики оружия под действием
энергии отдачи, торможение отката и накат под дейст-
вием энергии пороховых газов, отводимых через отвер-
15
стие в стенке ствола. Оружие этого типа работает в та-
кой последовательности (рис. 5).
Перед началом стрельбы затвор 1 с патроном нахо-
дится в заднем положении. При подаче тока в электро-
спуск одиночное шептало утапливается и затвор под
действием возвратной пружины 2 начинает двигаться
Рис. 5. Схема оружия, работающего на энергии отдачи и на энергии
отводимых газов-
'/ — затвор; 2—пружина; 3 — ствол; 4 — ствольная коробка; 5 — отверстие;
6 ~~ газовый цилиндр; 7 — ускоритель наката
вперед. В крайнем переднем положении затвор оста-
навливается пеньком ствола 3 и поворачивается вокруг
продольной оси, запирая канал ствола. После запирания
ствола боек накалывает капсюль, происходит выстрел.
Одновременно с движением снаряда под действием
пороховых газов по каналу ствола начинается движение
ствола со ствольной коробкой 4 и затвором назад. По-
сле прохода снарядом отверстия 5 в стволе пороховые
газы начинают заполнять газовый цилиндр 6, заторма-
живая откат ствола. При движении ствола назад газо-
вое отверстие перекрывается и поступление газов в ци-
линдр прекращается. При дальнейшем движении ствола
назад (до полной его остановки) газ, замкнутый в га-
зовом цилиндре, сжимается.
Во время отката ствола со ствольной коробкой при-
водятся в действие ускорительный механизм и механизм
подачи патрона.
При движении агрегата запирания со стволом назад
сжимается возвратная пружина. Затвор в заднем поло-
жении становится на автоматическое шептало. Меха-
низм подачи при откате ствола подает патронную ленту
на половину шага звена.
Накат ствола осуществляется энергией сжатых поро-
ховых газов, замкнутых в газовом цилиндре. Газы из
цилиндра стравливаются после прихода ствола в пе-
реднее положение,
16
В первой половине наката ствола механизм подачи
перемещает патронную ленту еще на половину шага
звена. Затем досылатель подает патрон в лапки затво-
ра. В конце наката ствольная коробка выключает ав-
томатическое шептало и через ускоритель наката 7 уве-
личивает скорость движения затвора в переднее поло-
жение. Если стрельбу нужно прекратить, то затвор
останавливается на одиночном шептале.
На принципе одновременного использования энер-
гии отдачи и энергии отводимых пороховых газов ра-
ботает пушка НР-30.
Стремление к повышению темпа стрельбы авиацион-
ного артиллерийского оружия привело к появлению
многоствольных пушек и пушек барабан-
ного типа. Эти пушки позволяют существенно (в 3—
5 раз) увеличить темп стрельбы за счет совмещения во
времени различных операций, связанных с подготовкой
и производством очередного выстрела.
Например, в шестиствольной пушке одновременно про-
исходит извлечение стреляной гильзы из первого ство-
ла, выстрел из второго ствола, запирание патронника
с очередным патроном в третьем стволе, досылание па-
трона в патронник четвертого ствола, подача патрона к
патроннику пятого ствола. После очередного выстрела
блок ствола разворачивается вокруг оси. Ствол с патро-
ном в патроннике становится против затвора. Автома-
тика пушки приводится в действие на основе тех же
принципов, о которых говорилось выше.
Барабанная пушка в отличие от многоствольной
имеет только один ствол и вращающийся барабан с не-
сколькими патронниками, что позволяет совместить опе-
рации при подготовке и производстве очередного вы-
стрела. Большим недостатком пушки барабанного типа
является то, что единственный ее ствол работает в
очень тяжелом тепловом режиме и в реяульгаге этого
очень быстро изнашивается. В многоствольных пушках
режим работы каждого из стволов мспсс напряженный.
§ 3. УСТРОЙСТВО АВТОМАТИЧЕСКОГО ОРУЖИЯ
В настоящее время создано большое количество раз-
личного автоматического оружия. По несмотря на кон-
структивные особенности отдельных типов оружия,
17
некоторые их механизмы и детали '(ствол, кожух, затвор,
механизм подачи, выбрасывающий механизм, спусковой
механизм, гидротормоз, механизм перезарядки) по свое-
му внешнему виду и устройству одинаковы.
Ствол представляет собой стальную трубу. Он пред-
назначен для направления полета снаряда, придания
ему начальной скорости и вращательного движения.
Внутренняя часть ствола (рис. 6) состоит из патрои-
Рис. 6. Ствол:
7 — патронник; 2 — соединительный конус; S — канал с нарезами
ника /, соединительного конуса 2 и цилиндрического
канала 5'с нарезами. Соединительный конус является
переходной частью от патронника к каналу ствола, он
обеспечивает более плавное врезание ведущей части сна-
ряда (пули). Канал с нарезами обеспечивает требуемое
движение снаряда. Нарезы идут по винтовой линии по
всей длине канала ствола.
Канал ствола (рис. 7) характеризуется калибром,
Рис. 7. Поперечное сечение ствола?
t — глубина нареза; а — ширина нареза; Ь— ши-
рина доля; d— калибр ствола
18
глубиной t и шириной нарезов а, шириной поля Ь, чис-
лом нарезов, их формой,^крутизной и направлением на-
резов.
Калибром называется диаметр d канала ствола,
измеренный между противоположными полями. Глубина
парезов t в зависимости от свойств материала ведущей
части снаряда принимается, как правило, равной 1/за
или V70 d. Число нарезов зависит от ширины поля b и
калибра оружия d. В стволах крупнокалиберных пуле-
метов (12—14 мм) обычно 6—8 нарезов, в стволах пу-
шек калибра 20—25 мм — 8—10 нарезов, пушек калибра
30—37 мм—12—16 нарезов.
Крутизной нарезов 6 (рис. 8) называется угол их
наклона к продольной оси канала ствола. Расстояние h
по длине канала ствола, на котором нарез делает один
оборот, называется шагом нарезов.
Рис. 8. Крутизна и ход нарезов ка-
нала ствола
Величины 6 и h должны обеспечивать устойчивый
полет снаряда в воздухе, т. е. придавать ему вращатель-
ное движение. Начальная угловая скорость, которую
будет иметь снаряд при вылете из канала стола ору-
жия:
Уо
л
Направление нарезов можем би и. правым или ле-
вым. Наибольшее распространение получила правая на-
резка, при которой снаряд получает вращение по ходу
19
часовой стрелки, если смотреть в направлении его по-
лета.
Кожух объединяет все детали оружия и служит для
направления движения основных движущихся его ча-
стей. На кожухе крепятся агрегаты, смягчающие отдачу
пушки при выстреле (пружины буфера, гидравлический
буфер), агрегат перезарядки и спусковой механизм. На
кожухе размещаются также цапфы для крепления ору-
жия на установке.
Затвор досылает патрон в патронник, запирает ка-
нал ствола во время выстрела, разбивает капсюль па-
трона, отпирает канал ствола, извлекает стреляную
гильзу из патронника.
Механизм подачи служит для подачи патронов в
лапки затвора. Досылание патрона в патронник произ-
водится затвором.
Существуют три основных вида питания оружия па-
тронами: магазинное, ленточное и барабанное. В авиа-
ционном оружии наибольшее распространение получило
ленточное питание. При ленточном питании патроны
снаряжаются при помощи звеньев в ленту, которая ук-
ладывается в патронный ящик и с помощью направляю-
щих патронных рукавов подается к оружию.
Выбрасывающий механизм служит для извлечения
стреляных гильз из патронника и удаления (выброса)
их из оружия.
Спусковой механизм служит для управления стрель-
бой. В авиационном оружии применяются механизмы,
позволяющие вести только автоматическую стрельбу.
Спусковой механизм имеет два шептала: автоматиче-
ское и одиночное. На автоматическом шептале затвор
задерживается после каждого выстрела в очереди; на
одиночном шептале запирающий агрегат останавли-
вается только в конце очереди при прекращении
стрельбы.
Все авиационные пушки и пулеметы оснащены
электроспусками для дистанционного управления
стрельбой. Электроспуск имеет электрические контакты
для включения сигнальной лампочки готовности оружия
к стрельбе, управления счетчиком оставшихся патронов
и электроавтоматом перезарядки оружия.
Для примера рассмотрим работу электроспуска пуш-
ки с коротким ходом ствола.
20
В исходном положении, когда оружие подготовлено
к выстрелу, затвор находится в заднем положении на
одиночном шептале, а ствол со ствольной коробкой —
в крайнем переднем положении. Боевая кнопка 1
(рис. 9) разомкнута и обмотка 2 электромагнита обес-
Рис. 9. Принципиальная схема электроспуска:
/— боевая кнопка; 2 — основная обмотка электромагни-
та; 3 и 5 — контакты; 4 — сигнальная лампочка; 6 — кон-
такт включения вспомогательной обмотки; 7 — вспомога-
тельная обмотка электромагнита; 8— счетчик остав-
шихся патронов
точена. Якорь электроспуска под действием своей пру-
жины находится вне электромагнита и контакты 3, 5
и 6 замкнуты. Сигнальная лампочка 4 готовности ору-
жия к стрельбе горит.
Если нажать на боевую кнопку 1, ток поступит в об-
мотку электромагнита. Под действием магнитного по-
тока якорь втянется внутрь электромагнита п освободит
одиночное шептало оружия. Ударник с затвором начнет
двигаться вперед. Контакт 3 разомкнется, лампочка 4
погаснет. В переднем положении боек разобьет капсюль
патрона, произойдет выстрел.
Одновременно с началом движения снаряда по ка-
налу ствола начинается огкаг подвижных частей, за-
твора и ствола (в заднее положение). Контакт 5 ствола
разомкнется, а контакт Л затора замкнется. При накате
ствола произойдет замыкание контакта 5. В результате
21
загорится лампочка 4 и сработает счетчик оставшихся
патронов 8.
Как видно из рис. 9, в электроспуске имеются две
обмотки: основная 2 и вспомогательная 7. Для выклю-
чения шептала требуется большое усилие. Чтобы его
создать, через обмотку 2 пропускают большой ток.
Если обмотка будет находиться под током длительное
время (стрельба длинными очередями), она перегреется
и может сгореть. Поэтому, когда якорь полностью втя-
нется, контакт 6 размыкается и ток поступает на вспо-
могательную обмотку 7. Величина тока на обмотке 2
уменьшится и станет достаточной только для удержания
якоря.
Гидротормоз устанавливается в некоторых системах
длд уменьшения скорости отката подвижных частей
оружия. Он обеспечивает более плавный приход по-
движных частей оружия в крайнее заднее положение и
уменьшает силу отдачи. Так как принцип работы гидро-
тормоза основан на использовании силы трения, возни-
кающей при протекании жидкости через малые отвер-
стия, то накапливания энергии в нем не происходит,
вследствие чего гидротормоз не оказывает влияния на
движение подвижных частей оружия вперед (накат).
Механизм перезарядки авиационного оружия, как
правило, пневматический и управляется при помощи
электропневмоклапана. Механизм перезарядки «обычно
состоит из цилиндра с поршнем, который связан с по-
движными частями автоматики оружия. Работа авто-
матики оружия при перезарядке аналогична работе при
стрельбе.
§ 4. ОБЩИЕ СВЕДЕНИЯ ПО ЭКСПЛУАТАЦИИ ОРУЖИЯ
Для обеспечения надежной работы оружия необхо-
димо:
— = своевременно осматривать, чистить и смазывать
оружие, а также заменять поврежденные или отрабо-
тавшие свой срок детали;
— строго соблюдать правила по уходу и сбережению
оружия, изложенные в соответствующих инструкциях и
описаниях;
— систематически изучать устройство оружия и пра-
вила его эксплуатации.
22
Разбирать оружие необходимо только для чистки,
смазки и для профилактического осмотра. Разбирать
боевое оружие для учебных целей не разрешается.
При разборке и сборке оружия необходимо соблю-
дать следующие правила.
Приступать к разборке и сборке оружия только после деталь-
ного изучения устройства оружия или разбираемого узла, а также
правил их разборки и сборки.
Перед разборкой необходимо убедиться, что оружие разряжено.
При работе следует пользоваться только тем инструментом и
материалами, которые предназначены для эксплуатации данного
типа оружия.
Разборку и сборку оружия производить на столе, файере или
брезенте; стол, фанера, брезент должны быть чистыми-.
Масло и жидкости, употребляемые при эксплуатации оружия,
должны быть чистыми и не содержать в себе твердых частиц
(грязь, песок) и воды.
Разборку и сборку оружия следует выполнять осторожно Нуж-
но оберегать детали оружия от механических повреждений. Приме-
нять молоток только в случаях, указанных в описании оружия. При
загрязнении (например, при падении па землю) деталь должна
быть промыта в керосине, насухо вытерта и смазана.
Для одновременной сборки нескольких пушек (пулеметов) не-
обходимо создать условия, при которых исключалась бы возмож-
ность замены одинаковых деталей.
При разборке сначала следует разобрать оружие на узлы, а за-
тем разбирать каждый узел, в отдельности.
Во избежание утери деталей отдельные механизмы оружия сле-
дует разбирать и собирать поочередно.
Окончательную сборку оружия можно производить только
после проверки правильности сборки отдельных узлов и механизмов.
При разборке и сборке электроспуска не допускать попадания
масла на электроконтакты спуска.
Согласно наставлению по инженерно-авиационной
службе установлены три вида чистки оружия чистка
без разборки, чистка с неполной разборкой и чистка с
полной разборкой оружия. Вид чистки оружия опреде-
ляется начальником группы авиационного вооружения.
При чистке без разборки оружие с установки не сни-
мается. При этом чистят и смазывают ствол н кожух
оружия. После полетов на стрельбу или после 15—20
дней стоянки самолетов без полетов, л также после по-
падания на оружие атмосферных осадков производят
чистку оружия с неполной разборкой.
Чистку оружия с полной разборкой производят
при его расконсервации (в сроки, установленные ин-
струкцией по эксплуатации самолета данного типа) и
23
в других случаях по указанию инженера части цо авиа-
ционному вооружению.
Разобранные детали и узлы пушек промываются в
керосине Т-1 или ТС-1, после чего тщательно проти-
раются ветошью. Электроспуск, гидробуфер и уплотни-
тельные манжеты промывать не разрешается.
После чистки детали оружия должны быть тщатель-
но осмотрены и смазаны. Смазку необходимо наносить
только на хорошо очищенную сухую поверхность и
сразу же после чистки ровным слоем. Не следует остав-
лять на деталях оружия значительные наплывы смазки.
Трущиеся части оружия и детали, работающие под
большой нагрузкой, смазываются обильно.
Оружие, поступающее с заводов или складов, перед
применением должно быть расконсервировано. Для
этого оружие разбирают на отдельные детали, которые
кипятят в горячей воде или в веретенном масле. Элек-
троспуски, гидротормоза и амортизаторы такой обра-
ботке не подвергаются.
После расконсервации детали оружия тщательно
протирают, осматривают и смазывают.
24
ГЛАВА II
БОЕПРИПАСЫ АРТИЛЛЕРИЙСКОГО
АВИАЦИОННОГО ОРУЖИЯ
§ 5. УСТРОЙСТВО БОЕПРИПАСОВ АВИАЦИОННОГО ОРУЖИЯ
Для заряжания авиационного оружия используются
патроны. В патрон (рис. 10) входят следующие элемен-
ты: гильза 1, пороховой заряд 2, воспламенительное
устройство 3, снаряд (пуля) 4, взрыватель 5, размедни-
тель 6. Данные патронов некоторых образцов авиацион-
ного оружия приведены в приложении 2.
Гильза предназначается для соединения всех эле-
ментов патрона, предохранения заряда от влияния вла-
ги и механических повреждений, обтюрации (предупре-
ждения прорыва газов в ствольную коробку) патрон-
ника во время выстрела.
Гильза имеет следующие основные элементы
(рис. И): дульце 1, скат 2, корпус 3, донную часть 4
и гнездо 5. Чтобы легче извлечь гильзу из патронника,
корпус ее делается конусным. Для захвата патрона лап-
ками затвора в дне гильзы имеется кольцевая проточ-
ка 6.
Пороховой заряд состоит из бездымного по-
роха определенной марки, насыпанного в гильзу. Мар-
кой пороха называется условное обозначение, указы-
вающее Тип пороха, размеры и форму ею зерен.
Воспламенительное ус i рои с i во (рис. 12)
предназначено для воспламенения порохового заряда.
В зависимости от калибра патронов оно изготовляется
или в виде капсюля-воспламепптеля, или в виде кап-
сюльной втулки.
25
26
ч
Капсюль-воспламенитель (рис. 12, о) представляет
собой латунный колпачок /, внутри которого находится
ударный состав 2, прикрытый фольгой 3. Ударный со-
став — это смесь гремучей ртути, антимония и бертоле-
товой соли. Он легко воспламеняется от удара бойка и
образует мощный луч огня, который воспламеняет поро-
ховой заряд. Капсюль-воспламенитель запрессовывается
в гнездо, находящееся в донной части гильзы.
В патронах большего калибра, у которых пороховой
заряд имеет большую поверхность горения и большой
вес, обычный капсюль-воспламенитель не может нор-
мально воспламенить заряд. В таких случаях приме-
няют капсюльную втулку, в которой к капсюлю-воспла-
менителю придается добавочный воспламенитель, обла-
дающий большой воспламенительной способностью.
Капсюльная втулка (рис. 12,6) состоит из корпуса 1
с резьбой для установки в гнездо гильзы, содержи-
теля 2 с воспламенительным составом 3 и капсюльного
узла, который включает латунную оболочку 4, капсюль-
воспламенитель 5, прижимную втулку 6 и латунный
кружок 7. Воспламенительный состав сверху закрыт ча-
шечкой 8.
Размеднитель. При движении снаряда по кана-
лу ствола на стенках канала откладывается слой меди
, от истирающихся ведущих поясков. Этот слой мешает
движению снаряда и способствует более быстрому раз-
рушению внутренней поверхности ствола. Для снятия
меди в гильзе между пороховым зарядом и дном сна-
ряда помещается размеднитель 6 (рис. 10), изготовляе-
мый из свинца. Свинец при выстреле сплавляется с
медью, образуя легкоплавкий состав, который уносится
вместе с пороховыми газами.
Снаряды и пули. В авиационном оружии наиболее
широкое распространение получили осколочно-фугасно-
зажигательный (ОФЗ), осколочно-зажигательно трасси-
рующий (ОЗТ), бронебойно-зажигателыю-трассирую-
щий (БЗТ), бронебойно-зажигательный (БЗ) и броне-
бойно-разрывной (БР) снаряды, зажигательно разрыв-
ная мгновенного действия (МДЗ) и бронебойно-зажи-
гательная трассирующая (БЗТ) пули
Осколочно-фугасно-зажигатальпый (ОФЗ) снаряд
(рис. 13) предназначен для поражения незащищенных
броней целей и зажигания горючего в непротектированных
27
28
Рис. 17. Бронебойно-
разрывной снаряд:
/ — корпус: 2 — ведущий
поясок; 3 — баллистиче-
ский наконечник; 4—
верхняя шашка ВВ; 5 —
нижняя шашка ВВ;
6 — взрыватель
и протестированных баках. Снаряд состоит из Тон-
костенного корпуса 1 с ведущим пояском 2 и двух ша-
шек 3 взрывчатого вещества A-IX-2
20% алюминиевого порошка). Тем-
пература горения этой смеси свыше
3000° С. Картонные прокладки 4
поджимаемые к шашкам взрывате-
лем, исключают их осевое переме-
щение. В донной части корпуса
имеется Т-образный выступ 5 для
крепления размеднителя. В голов-
ной части снаряда помещен взрыва-
тель 6.
Осколочно-зажигательно-трасси-
рующий (ОЗТ) снаряд (рис. 14) от-
личается от снаряда ОФЗ в основ-
ном наличием трассера, который по-
мещается в донной части снаряда.
При выстреле вспышка порохового
заряда передается трассирующему
составу 6. Сгорая, он дает яркий
след, хорошо видимый днем и
ночью.
Бронебойно-зажигательно-трасси-
рующий (БЗТ) снаряд предназначен
для поражения целей, защищенных
броней. Снаряд (рис. 15) состоит из
сального корпуса /, в нижней ча-
сти которого находится стакан 2, ук-
репленный при помощи гайки 3.
В стакане помещены зажигатель-
ный 4 и трассирующий 5 составы.
Сверху на корпус снаряда надет
баллистический наконечник 6.
Бронебойно-зажигательный (БЗ)
имеет то же назначение, что и снаряд БЗТ. В БЗ сна-
ряде нет трассера, зажигательное вещество 2 помещено
I» головной части между баллистическим наконечником 1
и бронебойным сердечником 3.
Бронебойно-разрывной (БР) снаряд (рис. 17) пред-
назначен для поражения целей, находящихся за броней.
Хорошо пробивая броню, снаряд наносит большие раз-
рушения. Он состоит из стального корпуса 1, на кото-
29
(80 % гексогена и
снаряд (рис. 16)
ром помещаются медный ведущий поясок 2 и баллисти-
ческий наконечник 3. Внутри корпуса размещены две
шашки 4 и 5 взрывчатого вещества A-IX-2. В донную
часть снаряда ввертывается взрыватель 6.
Для учебных стрельб из пушек применяются патро-
ны с осколочно-зажигательными или осколочно-фугас-
ными снарядами, снабженными взрывателями с са мо-
ли кв и даторами. Если снаряд не попадает в цель, то
через определенное время самоликвидатор взрывает его
в воздухе.
Зажигательно-разрывная мгновенного действия
(МДЗ) пуля применяется для стрельбы из пулеметов и
предназначается для поражения не защищенных броней
целей и зажигания горючего в протектированных и не-
протектированных баках. Пуля (рис. 18) состоит из
разрывная пуля;
/ — оболочка; 2 — свинцовая
рубашка; 3 — корпус; 4 —
стальная головка; 5—кап-
сюль-воспламенитель; 6 —
мембрана, 7 — зажигатель-
ный состав и взрывчатое
вещество
Рис. 19. Бронебойно-эа-
жигательно-трассирую-
щая пуляз
I — оболочка; 2 — саинцовая
рубашка; 3 —сердечник: 4~
зажигательный состав; б —
трассер
30
оболочки /, свинцовой рубашки 2, корпуса 3, стальной
головки 4, капсюля-воспламенителя 5, мембраны 6, за-
жигательного состава и взрывчатого вещества 7. При
ударе о преграду (листовой дюралюминий, фанеру)
мембрана 6 прорывается, частицы разрушенной мембра-
ны и преграды воздействуют на капсюль-воспламени-
тель. Взрыв капсюля приводит к детонации взрывча-
того вещества, воспламенению зажигательного состава
и разрыву пули.
Бронебойно-зажигательио-трассирующая (БЗТ) пу-
ля применяется для стрельбы из-пулеметов и предна-
значается для поражения живой силы и зажигания го-
рючего, находящегося за броней. Пуля (рис. 19) состоит
из оболочки /, свинцовой рубашки 2, сердечника 3, за-
жигательного состава 4 и трассера 5.
При ударе о броню разрушается оболочка пули. За-
жигательный состав под воздействием тепла, выделяе-
мого при ударе сердечника о броню, воспламеняется.
Пламя через отверстие, пробитое сердечником, поджи-
иет горючее. При попадании пули в небронированный
D.1K горючее может не воспламениться.
§ 6. ВЗРЫВАТЕЛИ
Устройство, сообщающее взрывной импульс взрыв-
чатому веществу, помещенному в снаряде, называется
взрывателем. В боеприпасах авиационного оружия
применяются как головные, так и донные взрыватели
ударного действия. По времени срабатывания взрыва-
юли разделяются на взрыватели мгновенного действия
н взрыватели с замедлением. Взрыватели мгновенного
действия срабатывают в момент встречи с npei радой.
Взрыватели с замедлением срабатывают через некрто-
рое время после встречи с преградой. Это необходимо
i in того, чтобы снаряд разорвался не на поверхности
преграды, а внутри цели. Снаряды, оснащенные взрыва-
13 1ямп с замедлением, вызывают в несколько раз боль-
шее разрушение, чем снаряды со взрывателями мгно-
в<иного действия.
В конструкцию взрывателя входят следующие общие
1я всех взрывателей механизмы: ударный механизм,
обез нечивающий срабатывание взрывателя при встрече
no е преградой; предохранительный механизм, обеспе-
31
чпвающпй безопасность снаряда при служебном обра-
щении и выстреле; механизм дальнего взведения, пред-
отвращающий возможность взрыва снаряда вблизи
оружия; капсюль-воспламенитель; за медлительное уст-
ройство, обеспечивающее взрыв не на поверхности цели,
а после некоторого углубления снаряда в цель; детони-
рующее устройство, обеспечивающее подрыв взрывча-
того вещества снаряда; механизм самоликвидации,
обеспечивающий подрыв снаряда в случае промаха.
Рассмотрим устройство и работу некоторых типовых
взрывателей.
На рис. 20 показан головной взрыватель замедленно-
го действия, с дальним взведением и самоликвидатором.
Взрыватель состоит из корпуса /, в котором размещены
ударный и предохранительный механизмы, механизм
дальнего взведения и втулка с самоликвидатором, за-
медлительным и детонаторным устройствами. Ударный
механизм включает мембрану 2, ударник 3, фиксатор 4,
звездку (предохранитель) 5, кольцо 6, спираль 7 и жа-
ло 8, Кольцо 6, опираясь на лапки звездки 5, удержи-
вает спираль 7 от раскручивания при служебном обра-
щении со взрывателем и при движении патронов в ав-
томатике пушки.
Пиротехнический самоликвидатор поджигается спе-
циальным воспламенительным устройством, размещен-
ным в вертикальном канале а втулки 9. Воспламенительное
устройство состоит из бокового жала 10, пружи-
ны 11, капсюля-воспламенителя 12 и пробки 13. Пиро-
технические составы, обеспечивающие требуемое время
самоликвидации взрывателя и подрыв капсюля-детона-'
тора, запрессованы в кольцевую канавку на верхнем
торце втулки 9 и в два вертикальных канала этой втул-
ки — воспламенительный канал б и передаточный ка-
нал в.
В нижнюю часть воспламенительного капала б, со-
единенного специальным сверлением с каналом а, за-
прессован воспламенительный состав, а за ним — два
столбика малогазового состава (в кольцевой канавке
втулки 9 и верхней части передаточного канала).В ниж-
ней части передаточного канала помещается усилитель,
представляющий собой стаканчик 14 с запрессованным
в него высотным водоустойчивым составом.
В центральной части втулки 9 размещено замедли-
32
тельное устройство, состоящее из замедлителя 15, кап-
сюля-воспламенителя 16, шайбы 17, предохранителя 18
и прижимной втулки 19. Капсюль-детонатор 20 крепится
во втулке 9 при помощи резьбовой втулки 21. Над кап-
сюлем-детонатором помещен дроссель 22 с отверстием
для прохода газов от капсюля-воспламенителя или уси-
лителя. Герметизация взрывателя достигается запрес-
Рис. 20. Головной взрыватель:
/ — корпус взрывателя; 2—мембрана; 3 — ударник; 4 фиксатор, 5 — звезд-
К«; 6 — кольцо; 7 — спираль; 8 — жало; 9 — втулка, 10 — боковое жало; 11 —
пружина; 12 •— капсюль-воспламенитель; 13 — пробка; 14 стаканчик, 15— за-
медлитель; 16 — капсюль-воспламенитель; /7 — шайба; 18 — предохранитель;
/'•> — прижимная втулка; 20 — капсюль-детонатор; 21 — резьбовая втулка; 22 —
фиссель; 23 — алюминиевое кольцо; а — вертикальный канал; б — воспламе-
нительный канал; в — передаточный канал
’ 320
33
совкой алюминиевого кольца 23, а также кернением
резьбового соединения втулок 9 и 21.
При выстреле капсюль-воспламенитель 12, помещен-
ный в боковом канале а втулки 9, сжимая пружину 11,
по инерции перемещается назад и накалывается на бо-
ковое жало 10. Луч огня от капсюля-воспламенителя 12
через соединительное отверстие зажигает воспламени-
тельный состав воспламенительного канала б. Одновре-
менно под действием силы инерции от линейного уско-
рения снаряда в канале ствола пушки кольцо 6, преодо-
левая сопротивление лапок звездки 5, оседает в выточку
фиксатора 4 и освобождает спираль 7, которая под дей-
ствием центробежных сил начинает разворачиваться.
Разворачивание спирали заканчивается на расстоянии
4,5—50 м от дульного среза ствола пушки.
При встрече снаряда с преградой до окончания раз-
ворачивания спирали не полностью развернувшиеся ее
витки будут удерживать жало 8 от накола капсюля-вос-
пламенителя. При встрече снаряда с преградой на рас-
стоянии более 50 м от дульного среза ствола пушки
(когда спираль уже полностью развернулась) под дей-
ствием реакции преграды жало 8 прокалывает предо-
хранитель 18 и накалывает капсюль-воспламенитель.
Раскаленные газы капсюля-воспламенителя через пазы
и отверстия в замедлителе 15 и отверстие в дросселе 22
проникают к капсюлю-детонатору 20. Его срабатывание
вызывает детонацию взрывчатого вещества снаряда.
Время, в течение которого газы капсюля-воспламени-
теля проходят через замедлитель и дроссель к капсюлю-
детонатору, обеспечивает необходимое ’замедление в
действии снаряда по цели.
Если снаряд на своем пути не встретит преграду, то
происходит самоликвидация снаряда после сгорания ма-
логазового состава в воспламенительном канале (через
14—20 сек после вылета снаряда из канала ствола
пушки).
На рис. 21 показан донный взрыватель замедленного
действия, с дальним взведением. Этими взрывателями
комплектуются бронебойно-разрывные снаряды. Взрыва-
тель состоит из стального корпуса 1, в котором собраны
ударно-предохранительный механизм инерционного дей-
ствия и детонирующее устройство с газодинамическим
замедлителем.
34
Ударно-предохранительный механизм включает удар-
ник 2 с запрессованным в нем капсюлем-воспламените-
лем 3, закрытым предохранительной мембраной 4, пре-
дохранитель 5, шайбу 6, оседающее кольцо 7, жесткий
предохранитель 8 и кольцо 9, прочно закрепленное на
ударнике 2. Предохранитель 5 представляет собой свер-
нутую в спираль ленту из мягкой красной меди.
Рис. 21. Донный взрыватель:
/ корпус; 2 — ударник; 3 — капсюль-нос-
плнмсиитель; 4 — мембрана; 5— предохрани
п»ль; 6, 16— шайбы; 7 — оседающее кольцо;
Я жесткий предохранитель; 9 — кольцо; 10 —
сгакнн; //-капсюль-детонатор; 12 — жало;
13 — замедлитель; 14 — предохранитель; 15 —
фиксатор; 17 — бумажный кружок
1<1()пирующее устройство смонтировано в стакане 10
и i unit из капсюля-детонатора И, жала 12, в шляпке
«• .и।>|н>1 <> имеются пазы и отверстие малого диаметра
। in прочи т газов, замедлителя 13 и предохранителя 14.
' iiiKiiii И) с перечисленными деталями ввинчивается в
iv ч|\ч трывагеля до упора в фиксатор 15, иаправляю-
П ншжсиие ударника.
'1о выстрела ударник 2 вместе с капсюлем-воспла-
•н iiuir icm 3 не может переместиться к жалу 12, так как
35
этому препятствуют предохранители 5 и 8 (предохра-
нитель 8 упирается в кольцо 9). При выстреле снаряда
кольцо 7 под действием сил инерции, преодолевая со-
противление жесткого предохранителя 8, оседает и
освобождает предохранитель 5, жоторый силой инерции
прижимается к шайбе 6. При движении снаряда в ка-
нале ствола предохранитель начинает раскручиваться
и после вылета снаряда из канала ствола полностью
освобождает ударник (взводит взрыватель) на расстоя-
нии 3—70 м от дульного среза ствола пушки, обеспечи-
вая тем самым дальность взведения.
При встрече с прочной преградой на дальностях,
превышающих дальность взведения взрывателя, удар-
ник 2 вследствие резкого торможения по инерции пере-
мещается в сторону жала 12 и, продавливая мембра-
ну 4, накалывает капсюль-
воспламенитель 3 Образо-
вавшиеся при этом раска-
ленные газы через паз в
жале проникают в камеру
разрежения, образованную
кольцевой выточкой замед-
лителя и шляпкой жала, от-
куда через отверстие малого
диаметра и паз на шляпке
поступают к капсюлю-дето-
натору 11 и вызывают его
детонацию, что приводит к
детонации ВВ и разрыву
снаряда.
При встрече снаряда с
преградой малой прочности
взрыватель не срабатывает,
так как энергия ударника 2
недостаточна для преодоле-
ния сопротивления предо-
хранителя 14 и мембраны 4.
Взрыватель А-23 —
головной, мгновенного дей-
ствия, дальнего взведения.
В стальном корпусе 1
(рис. 22) собран ударно-
предохранительный меха-
Рис. 22. Взрыватель А-23:
1 — корпус; 2 — мембрана; 3 —
ударник; 4 — жало; 5 — предохра-
нитель; 6 — фиксатор; 7 — капсюль-
детонатор; 8 — втулка; 9 — предо-
хранительная мембрана
36
пизм мгновенного действия. При помощи втулки 8 на
корпусе взрывателя укреплен капсюль-детонатор 7, при-
крытый сверху предохранительной мембраной 9 (контр-
нредохранитель).
Ударно-предохранительный механизм состоит из
ударника 3 и жала 4, удерживаемого от перемещения
к капсюлю-детонатору 7 предохранителем 5. Последний
выполнен в виде свернутой в спираль ленты, изготов-
юнной из мягкой красной меди. На конце первого вну-
||>еннего витка ленты пробито отверстие. Жало 4 опи-
рается на верхний торец спирали уступом буртика
большего диаметра. Предохранитель помещается на фик-
саторе 6, закрепленном в корпусе 1 кернением в трех
очках. В фиксаторе имеются два отверстия: централь-
ное— для прохода жала и боковое — для контроля
правильной постановки предохранителя. Сверху в корпус
в 1рывателя закатывается мембрана 2 из листовой стали.
<’п.1к мембраны и корпуса по всей окружности лаки-
руется шеллачным лаком для герметизации взрывателя.
До выстрела жало 4 не может наколоть капсюль-
нтопатор 7, так как оно удерживается от перемещения
нрс щхраннтелем 5. При выстреле предохранитель 5
прижимается к фиксатору 6. Трение, возникающее на
inpiiix предохранителя, и силы инерции от касатель-
но! <> ускорения удерживают спираль от преждевремен-
н*||о раскручивания под действием Все возрастающих
Нс и । робежных сил.
При сборке взрывателя предохранитель надевается
nil । и io и к, чтобы силы инерции от касательного уско-
| спиц ।решились закрутить спираль.
Hi» и ПЫЧС1П снаряда нз канала ствола силы ипер-
iiiiii >! .iniicfiiBiro и касательного ускорений, удсржи-
UII1IIH4 । ипраль от раскручивания, уменьшаются. Сво-
с "ши конец спирали под действием центробежных сил
и пн и прижимается к стенке корпуса. Спираль по-
....пни рю кручн1ы(чся и освобождает жало; нзрыва-
н >। и.;»п Функцию механизма дальнею взведения
и....... । npi । ixpiinii гель 5; дальпоеи. пзпг цчшя взры-
. ц. <>| oiipi 1*'пи(<л временем раскручивания спирали.
Ilpn in ipi ч । и при а и * преградой ударник 3 и жало 4
। ,1 к ..нс ни и ниш тру . жило прокалывает
in p.iini i< и и» и* мембрану 11 п накалывает капсюль-
rti । hi нор 1.1 loiiiiniiii киш lo.iH вызывает детонацию
37
взрывчатого вещества и разрыв снаряда. В случае
неполного раскручивания спирали при ударе снаряда
о преграду взрыватель сработает, так как отверстие
на конце внутреннего витка спирали уменьшает силу ее
сопротивления. Взрыватель взводится в 3,5—5,5 м от
дульного среза сгвола пушки.
Взрыватель -ликвидатор УБ-23 — головной.
Он предназначен для комплектации осколочно-фугасно-
зажигательных снарядов к учебно-боевым патронам.
В стальном корпусе 1 (рис. 23) расположен меха-
низм самоликвидации, состоящий из воспламенительно-
го устройства, трубки ликвидатора 6 с зажигательным
составом 7 и капсюля-детонатора 8. Воспламенительное
Рис. 23. Взрыватель-ликви-
датор УБ-23:
/ — корпус. 2 — капсюль-вос-
пламенитель, 3 — пружина; 4 —
жало, 5 шайба 6 — ликвида
тор. 7 зажигательный состав;
8 — капсюль детонатор; 9 — втул-
ка; 10 — радиальное отверстие;
а — боковой канал
устройство, включает капсюль-
воспламенитель 2, пружину 3
и жало 4. Они размещаются
в центральном канале голов-
ной части корпуса /, закры-
том сверху шайбой 5. Шесть
радиальных отверстий 10 в
корпусе втулки ликвидатора
служат для отвода газов с
целью создания возможно бо-
лее стабильных условий горе-
ния состава Втулка ликвида-
тора ввертывается во втулку 9,
прочно прижимая к ее основа-
нию буртик капсюля-детонато-
ра 8. Втулка 9 вместе с кап-
сюлем-детонатором и втулкой
ликвидатора ввинчивается в
корпус взрывателя до упора
втулки ликвидатора в корпус
Центральный канал головной
части корпуса взрывателя и
каналы втулки ликвидатора
соединены между собой при
помощи имеющегося в кор-
пусе / бокового канала а.
До выстрела капсюль-вос-
пламенитель 2 удерживается
от накола на жало 4 пружи-
ной 3. При выстреле под дей-
38
(твием сил инерции от линейного ускорения капсюль-
носпламенитель преодолевает сопротивление пружины,
продвигается в сторону жала и накалывается на него.
Капсюль воспламеняется, и образующиеся раскаленные
I азы через боковой канал а воспламеняют зажигатель-
ный состав во втулке ликвидатора В полете при встре-
че с преградой на дальностях, меньших дальности само-
шквидации, снаряд не взрывается. Только по истечег
нии определенного времени с момента выстрела горя-
щий состав ликвидатора вызывает детонацию капсюля-
детонатора, под влиянием которого и происходит взрыв
>ряда снаряда.
Для обеспечения автоматической стрельбы из авиа-
ционного оружия применяются гибкие патрон-
ные ленты, в которых патроны соединяются при
помощи стальных звеньев. Последние могут быть, в за-
висимости от конструкции оружия, закрытого или от-
। рытого типа (рис. 24).
Рис. 24. Звено:
а — передний и задний хвостовики: б — передние п зад-
ние лапки; в — крючок; г — петля; д — шторки; —
ребра жесткости
После извлечения патрона лепта легко рассыпается
11 дельные звенья. Каждое звено имеет передний и
1ннй хвостовики а для удержания звена на съемнике
nihil (при извлечении патрона из звена хвостовики
39
проходят в приемнике пушки по направляющим съем-
ника); передние и задние лапки б для удержания па-
трона в звене (передние лапки узкие, задние широкие);
крючок в для зацепления за петлю предыдущего звена;
петлю г для соединения с крючком последующего зве-
на; шторку д для предохранения от смятия гильзы пет-
лей звена; ребра е жесткости.
§ 7. ОБЩИЕ СВЕДЕНИЯ ПО ЭКСПЛУАТАЦИИ БОЕПРИПАСОВ
Безотказная работа оружия в значительной мере за-
висит от правильности снаряжения патронной ленты и
тщательной отбраковки неисправных патронов и звень-
ев, надежного хранения боекомплекта и правильности
ухода за ним, умелого и технически грамотного обра-
щения с патронами, постоянного наблюдения за их
качественным состоянием.
При обращении с патронами необходимо строго со-
блюдать правила безопасности и постоянно
контролировать их выполнение.
Запрещается содержать патроны навалом; бросать,
ударять и применять чрезмерные усилия при снаряже-
нии и расснаряжении патронной ленты.
К снаряжению в ленты не допускаются патроны и
звенья, имеющие:
— поврежденные или вращающиеся мембраны
взрывателей;
— трещины на дульцах гильз, видимые невооружен-
ным глазом;
— свободное вращение или продольную качку сна-
рядов в гильзе;
— сплошную коррозию в месте запрессовки мем-
браны;
— неправильную посадку капсюля;
— вмятины на гильзах;
— патроны, уже бывшие в автоматике оружия;
— звенья с трещинами или растянутые по шагу.
Звенья, предназначенные для снаряжения патронной
ленты, расконсервируются горячей водой или горячим
воздухом с последующей промывкой их в бензине с до-
бавлением 5—10% ружейного масла.
Снаряжение патронных лент производится специаль-
ными машинками или вручную. При снаряжении и вы-
40
равнивании ленты необходимо оберегать капсюли и
взрыватели от ударов. Во избежание повреждения
шеньев и гильз категорически запрещается при снаря-
жении ленты применять металлические молотки. Па-
новы, находящиеся в боекомплекте, разрешается слег-
ка смазать той смазкой, которая применяется для смаз-
ки данного типа оружия. После снаряжения лента про-
веряется на гибкость и прочность посадки патронов в
ленте. Лента должна свободно сгибаться, патроны в
звеньях не должны иметь продольного перемещения.
Хранение патронов. Патроны, временно сня-
тые с самолетов, укладываются в деревянные ящики и
предохраняются от попадания на них влаги, пыли и от
воздействия солнечных лучей (в летнее время), так как
под влиянием солнечных лучей пороховые заряды па-
1ронов нагреваются. При применении нагретых патро-
нов давление пороховых газов в канале ствола оружия
может превысить допустимые пределы и вызвать по-
ломку деталей оружия и установки.
Длительное хранение патронов должно произво-
диться в сухих помещениях в таре на деревянных под-
кладках. Нельзя хранить патроны в помещениях, насы-
щенных парами аммиака, так как под влиянием амми-
ачной среды происходит разрушение (растрескивание)
латунных гильз патронов. Не допускается хранение па-
ipoHOB с другим имуществом.
Чистка патронов выполняется ветошью. Для удале-
ния коррозии с поверхности снаряда можно применять
чистую суконную ветошь. Нельзя для чистки патронов
применять наждачную бумагу или песок.
Маркировка патронов. Для того чтобы не
перепутать различные типы патронов, на их элементах
(гильзе, снаряде) наносится маркировка: номер завода-
и шотовителя, дата изготовления и другие необходимые
данные. Маркировка имеется и на таре, в которую упа-
ковываются патроны.
Кроме того, на снаряды некоторых типов патронов
наносится отличительная окраска. Например, па сна-
ряды, имеющие трассеры, впереди ведущего пояска на-
носится кольцевая полоса зеленого цвета. У всех оско-
ночно-зажигательных снарядов головная часть взрыва-
ния окрашивается в красный цвет и т. д. Отличитель-
ная окраска некоторых патронов приведена в табл. 1.
41
Таблица 1
Отличительная окраска некоторых патронов
Наименование патрона
Отличительная окраска
12,7-мм патрон с бронебойно-
зажигательной пулей Б-32
12,7-мм патрон с бронебойно-
зажигательно-трассирующей пу-
лей БЗТ-44 или БЗТ-46
23-мм патрон с осколочно-
фугасно-зажигательным (ОФЗ)
снарядом
23-JW.n патрон с бронебойно-
зажигательным (БЗ) снарядом
23-лы! патрон с цельнокор-
пусным бронебойно-зажигатель-
ным снарядом
ЗО-лш патрон с осколочно-
фугасно-зажигательным (ОФЗ)
снарядом
30-лои патрон с бронебойно:
разрывным (БР) снарядом
30 мм учебно-боевой патрон
со снарядом УБМТ-30, имею-
щим трассер
37-лои патрон с осколочно-
фугасно-зажигательным (ОФЗ)
снарядом
Вершина пули окрашена В чер-
ный цвет; ниже — красная кольце-
вая полоса
Вершина пули окрашена в фио-
летовый цвет; ниже — красная
кольцевая полоса
Головная частьвзрывателя окра-
шена в красный цвет. На кор-
пусе снаряда впереди медного ве-
дущего пояска — красная кольце-
вая полоса
Снаряд не окрашивается, имеет
баллистический наконечник
На баллистическом наконечнике
на расстоянии 10 мм от верхнего
среза нанесена красная кольцевая
полоса
Головная часть взрывателя окра-
шена в красный цвет. На корпу-
се снаряда впереди медного веду-
щего пояска нанесена красная
кольцевая полоса
Вершина баллистического нако-
нечника снаряда со взрывателем
АД-30 окрашивается в красный
цвет. Снаряды с другими взрыва
телями не окрашиваются
Головная часть корпуса взрыва-
теля окрашена в голубой цвет. На
корпусе снаряда впереди медного
ведущего пояска нанесена зеленая
кольцевая полоса
На цилиндрической части кор-
пуса снаряда нанесена красная
кольцевая полоса
42
ГЛАВА III
АВИАЦИОННЫЕ АРТИЛЛЕРИЙСКИЕ УСТАНОВКИ
§ 8. НЕПОДВИЖНЫЕ УСТАНОВКИ
Авиационной артиллерийской установкой называется
совокупность агрегатов, механизмов и систем, предна-
шаченных для крепления оружия на самолете, наведе-
ния оружия на цель и обеспечения' эффективной стрель-
бы по цели. По степени подвижности оружия относи-
н’льно самолета установки делятся на неподвижные,
<>| раниченно подвижные и подвижные.
Неподвижные установки предназначаются для креп-
ИЧН1Я оружия к самолету, управления огнем и обеспе-
чения бесперебойного питания оружия боеприпасами.
Они, как правило, размещаются в передней части фю-
еляжа, в корне крыла самолета или в специальных
контейнерах, подвешиваемых на держатели самолета.
>111 установки могут применяться как на самолетах-ис-
Iребителях, так и на самолетах-бомбардировщиках. На-
не теине оружия на цель осуществляется разворотом са-
молета в вертикальной и горизонтальной плоскостях.
Неподвижная установка включает: лафет, агрегаты
.правления стрельбой и перезаряж'аннем оружия, а
ниже приспособления, обеспечивающие питание ору-
iiiiii, отвод стреляных гильз и звеньев.
Лафет — это устройство, предназначенное для кре-
пления оружия, удержания его в заданном положении
и передачи на силовые элементы самолета сил, возни-
I ihiiiiHX при стрельбе.
Лнфет неподвижной установки состоит из основания
। Kiiik.i лафета), узлов крепления оружия к лафету и
। . >> крепления лафета к силовым элементам конструк-
43
ции самолета. Чаще всего основание лафета выпол-
няется в виде силовой фермы. Форма ее и размеры
определяются расположением силовых элементов само-
лета и расстоянием между узлами крепления оружия.
Часто на этой ферме, кроме оружия, устанавливают
и некоторые элементы системы управления огнем и пе-
резаряжанием оружия, патронный ящик. На основании
лафета устанавливаются передний и задний узлы креп-
ления оружия.
Передний узел крепления—основной си-
ловой узел, воспринимающий силу отдачи оружия.
В главе I было сказано, что во время движения сна-
ряда по каналу ствола оружия пороховые газы давят
на снаряд и на дно гильзы. Возникающая при этом сила
отдачи через затвор, кожух и передние узлы крепления
оружия передается на лафет, а затем и на силовые эле-
менты конструкции самолета. В оружии калибра 20—
30 мм максимальное значение силы отдачи достигает
10—20 т. Такую нагрузку могут выдержать только очень
прочные силовые элементы конструкции самолета. Для
уменьшения силы, действующей на самолет со стороны
оружия, применяют амортизаторы силы от-
дач и. Амортизатор силы отдачи оружия, работающего
на энергии отводимых газов, является самостоятельным
агрегатом. Он рассчитывается для данного типа оружия
и является его принадлежностью. Амортизатор силы
отдачи оружия, работающего па энергии отдачи, яв-
ляется составной частью оружия. На рис. 25 показан
Рис. 25. Разрез амортизатора силы отдачи:
/ — корпус цилиндра; У—шток; а —пружина; 4 — фрикционная муфта
разрез одного из возможных типов амортизаторов силы
отдачи оружия, работающего на энергии отводимых по-
роховых газов. Внутри корпуса цилиндра 1 помещены
шток 2, пружина 3 и фрикционная муфта 4.
44
Передний узел крепления оружия состоит из двух
опор — двух цапф. Цилиндры амортизаторов соединя-
ются со станком лафета, а цапфы оружия — со штоками
амортизаторов.
Рассмотрим работу амортизатора. Во время выстре-
ла на корпус оружия действует сила давления порохо-
вых газов Р и сила сопротивления пружины амортиза-
тора Q. Пружина заключена между корпусом оружия 1
и станком лафета 2 (рис. 26). На станок лафета и си-
__I I I ! | I I ! I | 1 I | । । । ! I 1 । .. . .
X____ , I-—----1
Рис. 26. Схема сил, действующих на оружие и лафет}
/ — корпус оружия; 2— станок лафета
ловые элементы самолета, к которым крепится лафет,
действует сила Qb С достаточной для практики точно-
стью можно считать, что силы Q и Q) равны.
Под действием силы давления пороховых газов на
дно гильзы оружие начинает откатываться назад. При
этом сжимается пружина амортизатора силы отдачи.
На рис. 27 приведен график изменения силы сопротив-
ления, действующей на элементы конструкции самоле-
та, в зависимости от величины отката оружия /, Этот
график справедлив и для измене-
ния силы сопротивления пружи-
ны амортизатора. Можно ска-
зать, что при откате оружия его
кинетическая энергия переходит
в потенциальную энергию пружи-
ны амортизатора. На определен-
ном пути отката /т, на котором
работа силы сопротивления пру-
жины амортизатора станет равна
кинетической энергии оружия,
огкат оружия прекратится.
Рис. 27. График измене-
ния силы сопротивления
45
Из крайнего заднего положения под действием пру-
жины амортизатора оружие начнет двигаться вперед.
При этом оружие остановится не в том положении, в ко-
тором оно находилось перед первым выстрелом, а в
точке 1К (рис. 26), за точкой /0. Отрезок 101т характери-
зует величину отката, .а отрезок /0/к—величину выката
оружия. При движении вперед оружие сжимает пру-
жину амортизатора и после прихода в крайнее перед-
нее положение вновь начнет двигаться назад.
При отсутствии трения между оружием и лафетом
эти колебания были бы незатухающими. Благодаря на-
личию в амортизаторе фрикционной муфты колебания
оружия быстро затухают. При этом кинетическая энер-
гия оружия переходит в тепловую. Фрикционная муфта
амортизатора нагревается.
Выше было сказано, что сила, действующая на эле-
менты конструкции самолета,
возникает вопрос, каким обр
Рис. 28. Зависимость силы от-
дачи от жесткости пружины
амортизатора
очень велика. Поэтому
азом ее можно уменьшить.
Прежде чем ответить на
этот вопрос, рассмотрим ра-
боту двух амортизаторов,
имеющих пружины различ-
ной жесткости С| и С2
(рис. 28). Пусть С, больше
С2. При одной и той же ки-
нетической энергии оружия
величина его отката будет
тем больше, чем меньше
жесткость пружины. Работа
сил сопротивления обоих
амортизаторов одинакова и
равна кинетической энергии
оружия, т. е.
2 ^niax mi 2 ^max m'
Следовательно, если I больше lm, то макси-
мальная величина силы амортизатора, имеющего
пружину меньшей жесткости, меньше максимальной ве-
личины силы Q, амортизатора, имеющего пружину
большей жесткости. Рассмотренный пример показывает,
что амортизатор уменьшает величину силы, действую-
46
uieii co стороны оружия на элементы конструкции само-
лета. При этом, чем больше откат бружия, тем меньше
усилие, прикладываемое к элементам конструкции са-
молета.
Задний узел крепления оружия (рис.29)
практически не воспринимает нагрузок, возникающих
при стрельбе из оружия. Он является поддерживаю-
щим узлом. Конструкция заднего узла обеспечивает
Рис. 29. Задний узел крепления оружия:
7 — опора; 2 — регулировочные гайки; 3 — кронштейн;
4 — регулировочный болт; 5 — станок лафета
перемещение оружия в вертикальной и горизонтальной
плоскостях при его пристрелке. Задний узел крепления
оружия к лафету состоит из опоры /, регулировочных
гаек 2, кронштейна 3 и регулировочного болта 4. Кожух
оружия своим выступом вставляется в фигурный паз
опоры. Перемещение оружия по вертикали обеспечи-
вается вращением гаек 2. Перемещение оружия по го-
ризонтали обеспечивается сдвигом кронштейна 3 отно-
сительно станка лафета 5. Иногда для уменьшения ви-
брации ствола применяют еще и третью точку опору
оружия — узел крепления ствола.
Питание оружия. Патроны для питания ору-
жия вставляются в звенья, с помощью которых обра-
зуется патронная лента. Для размещения патронных
лент на боевых самолетах используются патронные
ящики. Кроме патронных ящиков боезапас патронов мо-
жет размещаться в специальных желобах, которые про-
кладываются внутри крыла или вокруг фюзеляжа само-
лета. Соединение патронного ящика (желоба) с прием-
ником оружия осуществляется с помощью подводящих
рукавов.
47
На рис. 30 показан патронный ящик, на котором при-
ведена схема укладки патронной ленты. Так как этот
ящик устанавливается в непосредственной близости от
пушки, его горловина заменяет подводящий рукав и со-
единяется непосредственно'с приемником пушки. Такое
соединение патронного ящика с пушкой возможно в
том случае, если окно приемного механизма пушки не
перемещается во время стрельбы. В противном случае
для соединения пушки с патронным ящиком должны
применяться гибкие рукава.
Отвод стреляных гильз и звеньев осуществляется с
помощью гильзоотводов и звеньеотводов. Их форма
определяется формами патрона и звена, а также местом
расположения оружия на самолете. В тех случаях, ко-
гда отвод гильз и звеньев за борт самолета недопустим,
предусматривают их сбор и хранение на борту само-
лета.
Кабины современных самолетов, летающих на боль-
ших высотах, выполняются в виде герметизированных
отсеков. Из-за трудности обеспечения герметизации и
возможности попадания пороховых газов в этих отсеках
не должно быть артиллерийских установок и оружия.
Поэтому их размещают в тех частях самолета, откуда
обеспечивается желаемая зона обстрела (применитель-
но к подвижным установкам) и допустимое рассеива-
ние снарядов из-за имеющей место деформации кон-
струкции самолета. Раздельное размещение летчика
48
(стрелка) и установки вынуждает применять дистан-
ционное управление стрельбой и перезаряжа-
нием оружия.
Исполнительным элементом системы (цепей) дистан-
ционного управления стрельбой является электроспуск,
представляющий собой силовой электромагнит. Якорь
электроспуска при подаче тока в его обмотку нажимает
на шептало. Электроспуск является составной частью
современных авиационных пушек и пулеметов. На
рис. 31 приведена принципиальная электросхема ди-
Рис. 31. Электросхема дистанционного управле-
ния стрельбой:
/ — автомат защиты сети; 2— боевая кнопка; 3 —реле
стрельбы, 4— электроспуск; 5— контакты механизма
ограничения стрельбы; /<3 — контакты реле стрельбы;
и — обмотки
станционного управления стрельбой из пушки. При
включении автомата защиты сети «Пушки» 1, ток от
плюсовой шины поступает на боевую кнопку 2 и кон-
такты реле стрельбы При нажатии на боевую кноп-
ку ток через АЗС 1, кнопку 2 и нормально замкнутые
контакты 5 поступает на обмотку реле 3. Реле сраба-
тывает и замыкает св'ои контакты. Замкнувшиеся кон-
такты реле стрельбы обеспечивают подачу тока на об-
мотку электроспуска 4.
Электроспуск имеет две обмотки: wt и w2. У обмот-
ки W| малое омическое сопротивление, что обеспечивает
большое тяговое усилие электромагнита. Электроспуск,
сработав, размыкает свои нормально замкнутые кон-
такты. При этом последовательно с обмоткой вклю-
чается высокоомная обмотка w2- Такое подключение об-
моток исключает перегрев электроспуска при длитель-
ной работе.
Дистанционное управление перезаряжанием артил-
лерийского оружия может осущео влиться только в том
случае, если в его конструкции предусмотрены для этого
специальные механизмы. Большинство современных
49
авиационных пушек имеет механизмы перезаря-
жания (электрические, пиротехнические или пневма-
тические). Наибольшее распространение получили пнев-
матические механизмы перезаряжания оружия (пневмо-
цилиндры перезаряжания). Для оружия, имеющего
пневматические механизмы перезаряжания, применяется
электропневматическая система дистанционного управ-
ления перезаряжанием оружия (рис. 32).
Рис. 32. Схема дистанционного управления перезаряжанием
оружия:
/ — баллон; 2 — пневмоцилиндр; 3 — электропневмоклапан; 4 — кнопка
перезаряжания; 5 — контакты автомата перезаряжания
Пневмоперезаряжание оружия производится сжатым
воздухом давлением 40—50 атм, который находится в
расходном баллоне 7. Подача воздуха из расходного •
баллона в пневмоцилиндр 2 осуществляется с помощью
электропневмоклапана 3. Для дистанционного управле-
ния электропневмоклапаном в кабине самолета устанав-
ливается кнопка перезаряжания оружия 4, а для авто-
матического устранения задержек, которые могут быть
при стрельбе, в системах перезаряжания применяют
а в т о м а т-ы перезаряжания. Контакты 5 испол-
нительного реле такого автомата включаются парал-
лельно контактам кнопки перезаряжания.
В системах перезаряжания нашел широкое примене-
ние электропневмоклапан (рис. 33). Он имеет
два штуцера: входной 10 и выходной 17. Сжатый воз-
дух из расходного баллона через штуцер 10 поступает
в камеру 11 и давит на впускной клапан 2, прижимая
его к кольцевому седлу. Воздух из расходного баллона
поступает также через фильтр 13 в дроссель 12 и давит
на резиновое уплотнение 14 сервоклапана 6. Сервокла-
пан прижимается к своему седлу пружиной 9. Сжатый
воздух не может пройти во внутреннюю полость порш-
ня 4. При нажатии на кнопку перезаряжания 4
(рис. 32) ток поступает в обмотку электромагнита 8
50
51
(рис. 33) и якорь 7, преодолевая усилие пружины 9,
перемещается вправо.
Вместе с якорем переместится связанный с ним сер-
воклапан и закроет отверстие 20 в заглушке 15. Сжа-
тый воздух получит доступ во внутреннюю полость ка-
меры 16. Так как площадь поршня 4 больше площади
впускного клапана 2, то усилие, действующее на пор-
шень со стороны камеры 16 (справа), будет больше
усилия пружины 5 и силы, действующей на поршень со
стороны впускного клапана 2. Поршень передвинется
влево, при этом впускной клапан отойдет от своего
седла, а выпускной клапан 3 прижмется к своему
седлу. Сжатый воздух из расходного баллона через
штуцеры 10 и 17 будет поступать в пневмоцилиндр ору-
жия. Поршень пневмоцилиндра переместится влево.
После отпускания кнопки перезаряжания электро-
магнит 8 обесточится и якорь 7 под действием пружи-
ны 9 переместит влево сервоклапан 6. Подача воздуха в
камеру 16 прекратится, а имеющийся в ней воздух че-
рез открывшееся отверстие 20 выйдет в атмосферу. Дав-
ление воздуха на впускной клапан заставит его переме-
ститься вправо и перекрыть доступ воздуха в пневмоци-
линдр. Вместе с впускным клапаном 2 переместится
вправо и выпускной клапан 3. При этом сжатый воздух
из пневмоцилиндра через отверстия камеры 18 выйдет
в атмосферу. Поршень пневмоцилиндра вернется в ис-
ходное положение. Перезаряжание оружия закончено.
Конструкцией электроклапана предусмотрено ручное
управление подачей воздуха с помощью рычага 19.
Выше упоминалось, что управление перезаряжанием
оружия, отказавшего в стрельбе, может осуществляться
автоматом перезаряжания. Необходимость применения
такого автомата вызвана тем, что отказ одной пушки в
условиях полета (шум двигателей, стрельба из других
пушек и т. д.) может быть не замечен летчиком или
стрелком. Более того, если отказ все же обнаружен, то
для ручного перезаряжания потребуется большое время.
Это недопустимо в скоротечном воздушном бою. Ины-
ми словами, автомат освобождает человека от наблю-
дения за работой стреляющего оружия и устранения
задержек путем перезаряжания.
Автомат перезаряжания оружия представ-
ляет собой электромеханическое' устройство, предназна-
52
ченное для обнаружения и автоматического устранения
задержек в стрельбе оружия его перезаряжанием Об
исправной работе оружия автомат получает сигналы от
специальных датчиков, установленных на оружии. На
рис. 34 приведена принципиальная электросхема авто-
мата перезаряжания оружия, рассчитанного на работу с
пушкой, имеющей переднее шептало. Подвижные части
этой пушки перед выстрелом находятся в переднем по-
ложении. Пушка имеет контакт переднего положения
ручного перезаряжания
Рис. 34. Электросхема автомата
перезаряжания оружия
(КПП), который замкнут на 65% хода подвижных ча-
стей от переднего положения к заднему, и контакт зад-
него положения (КЗП), который замкнут па остав-
шихся 35% хода подвижных частей.
В схеме автомата работают четыре электромагнит-
ных реле, каждое из которых имеет свою выдержку
времени на отпускание. Автомат включаем» под юк
вместе с включением питания пушечной vci шовки. Если
пушка заряжена, то КПП замкнут, а КЗП разомкнут.
При включении питания автомата срабатывает реле Pi,
гак как контакт К4 реле Р4 нормально замкнут. При
срабатывании реле Р, замыкается контакт находя-
щийся в цепи реле Р? Реле Р? срабатывает, замыкает
53
свои контакты в цепи реле Рз и размыкает контакты К2
в цепи электропневмоклапана ЭК. Замыкание контак-
тов К2 в цепи реле Рз приводит к его срабатыванию, а
следовательно, к замыканию контактов /<3 в цепи ЭК-
Автомат готов к работе.
При нажатии на боевую кнопку ток поступает на
электроспуск пушки и на реле стрельбы (рис. 31). Одна
пара нормально разомкнутых контактов КРС этого реле
включена последовательно с обмоткой реле Pi автомата
перезаряжания. Срабатывание реле стрельбы приводит
к замыканию его контактов КРС, а следовательно, и к
срабатыванию реле Р4. Контакты Л4, находящиеся в
цепи Pi, размыкаются, но реле Pi не отпускает, так как
оно имеет выдержку на отпускание. Во время стрельбы
обмотка реле Pt подключается к массе через контакты
КЗП. Частота замыкания контактов пушки опреде-
ляется темпом ее стрельбы. При темпе стрельбы, рав-
ном 1200 выстрелов в минуту, КЗП и КПП будут замы-
каться через каждые 0,05 сек. Время выдержки на от-
пускание реле Р] равно 0,15 сек, т. е. больше, чем про-
межуток времени между двумя выстрелами. Следова-
тельно, при стрельбе без задержек автомат не включает
электропневмоклапан.
Если во время стрельбы появится задержка типа
осечки, то подвижные части пушки остановятся в перед-
нем положении. Так как боевая кнопка нажата, то кон-
такты Ki и контакт КЗП разомкнуты. Спустя 0,15 сек
реле Pi отпустит, разомкнув Ki в цепи реле Р2. Это при-
ведет к тому, что спустя 0,2 сек после отпускания ре-
ле Pi отпустит реле Р2. При этом замкнутся контак-
ты К2 в цепи ЭК и контакты в цепи Р3. Так как реле Р3
имеет выдержку времени на отпускание, то его контакты
в цепи ЭК остаются в течение 0,5 сек замкнутыми.
Электропневмоклапан срабатывает и подает воздух в
пневмоцилиндр пушки. Подвижные части пушки отхо-
дят в заднее положение. Патрон с отказавшим капсю-
лем будет выброшен, а его место впоследствии займет
новый патрон.
Как только подвижные части пушки дойдут по зад-
п< го положения, замкнется контакт КЗП и реле Pi сра-
ботает. Так как контакт КПП разомкнут, то реле Р2 не
сработает до тех пор, пока подвижные части пушки не
придут в переднее положение. Возврат подвижных ча-
54
стен в переднее положение начнется после выключения
пневмоклапана, т. е после отпускания реле Рз. Оно от-
пускает спустя 0,5 сек после отпускания реле Р2- Если
при отказе подвижные части остановятся не в переднем
положении, а в любой другой точке зоны действия КПП
(65% хода подвижных частей), то автомат будет реаги-
ровать на этот отказ так же, как и на осечку.
Если в результате отказа подвижные части остано-
вятся в зоне действия КЗП, то разомкнутые контакты
КПП обесточат реле Р2. Реле Р2 отпустит, замкнет свои
контакты в цепи ЭК и разомкнет контакты в цепи Р3.
Так как реле Р3 имеет выдержку времени на отпускание
около 0,5 сек, то его контакты в цепи ЭК остаются в те-
чение этого времени замкнутыми. Электропневмоклапан
срабатывает и подает воздух в пневмоцилиндр пушки.
Если задержка устранилась перезаряжанием, то пушка
вновь начнет работать
Автомат перезаряжания, кроме устранения задержек
перезаряжанием оружия, выполняет и другие операции,
а именно:
— перед очередным выстрелом после перезаряжа-
ния обеспечивает выдержку времени до 0,2 сек-, необхо-
димую для стравливания воздуха из пневмоцилиндра
пушки;
— отключает электропневмоклапан после четырех
перезаряжаний оружия.
§ 9. ОБЩИЕ СВЕДЕНИЯ О ПОДВИЖНЫХ УСТАНОВКАХ
Подвижные авиационные артиллерийские установки
обеспечивают перемещение оружия относительно само-
лета в двух плоскостях. Наиболее широкое применение
подвижные установки нашли на самолетах-бомбарди-
ровщиках и самолетах военно-транспор! пой авиации.
Не исключена возможность применения их и па других
типах боевых самолетов.
Для наведения оружия на цель, обеспечения эффек-
тивной стрельбы по цели и исключения повреждения ча-
стей собственного самолета подвижные установки имеют
ряд специфических устройств п споем, которые суще-
ственно отличают их от неподвижных установок. К их
числу следует отнести силовой привод, систему дистап-
55
Рис. 35. Подвижный лафет:
1 — подвижное кольцо; 2 — лафет;
3 и 4 — приводные двигатели
ционного управления положением оружия, ограничи-
тельные устройства.
Типовая схема механизма, обеспечивающая переме-
щение оружия в двух плоскостях, изображена на рис. 35.
Подвижное кольцо 1 может перемещаться относительно
неподвижного кольца (на рисунке не показано) и несет
на себе лафет 2. Лафет вместе с установленным на нем
оружием может перемешаться относительно подвижного
кольца. Вращение оружия в одной плоскости осущест-
вляется приводным двигателем 3, а в другой плоско-
сти — приводным двигате-
лем 4. Большие скорости
полета самолетов сущест-
венно сократили продолжи-
тельность атаки цели, ио
при этом значительно уве-
личились аэродинамические
силы, действующие на ору-
жие и установку. Это прак-
тически исключило возмож-
ность изменения положения
оружия мускульной силой
человека. Поэтому совре-
менные подвижные установ-
ки имеют электрический или
гидравлический силовой
привод.
артиллерийской уста-
новки должен обеспечить слежение оружия за целью,
угловая скорость перемещения которой относительно
стреляющего самолета может меняться в очень широких
пределах. Практически силовой привод должен обеспе-
чивать любую угловую скорость вращения оружия от О
до 1 рад/сек. Стволы оружия подвижной установки
выступают за ее обтекатель, поэтому при вращении
установки в полете на стволы оружия действуют пере-
менные по величине и направлению аэродинамические
силы. Чтобы обеспечить плавное слежение оружия за
целью, силовой привод установки должен компенсиро-
вать изменяющиеся нагрузки.
Подвижные установки размещают в самых различ-
ных частях самолета. Для обороны задней полусферы
подвижную установку размещают в кормовой части
56
Силовой привод
фюзеляжа, для обороны верхней полусферы — над фю-
зеляжем, а для-обороны нижней полусферы — под фю-
зеляжем.
Члены экипажа, которым поручено управление ору-
жием, размещаются в гермокабинах. При раздельном
размещении стрелка и установки необходимы системы
дистанционного управления изменением положения ору-
жия, управления огнем и перезаряжанием. Введение
систем дистанционного управления значительно услож-
няет конструкцию и эксплуатацию подвижных артилле-
рийских установок.
Система дистанционного управления
положением оружия связывает ручки управления уста-
Рис. 36. Схема связи с регулятором скорости
вращения:
/ — ручки управления установкой; 2 — потенциометр;
3 — электродвигатель
иовкой, расположенные в кабине стрелка, с прицелом и
самой установкой. Возможны две основные схемы связи
оружия с ручками управления установкой. Первая схе-
ма связи заключается в том, что угол поворота ручек
управления определяет скорость вращения установки,
а направление отклонения ручек — направление враще-
ния установки. Эта схема называется схемой связи с ре-
гулятором скорости, вращения (рис. 36).
Оружие установки, имеющей такую схему связи с
ручками управления, будет непрерывно следить за
целью, если стрелок подбором угла отклонения ручек
управления обеспечит требуемую скорость его враще-
ния. Ручки управления установкой 1 связаны с движ-
ком потенциометра 2. В исходном положении движок
совмещен со .средней точкой потенциометра. Следова-
тельно, напряжение па щетках электродвигателя 3, под-
57
ключенных к движку потенциометра и его средней точ-
ке, равно нулю. Ротор двигателя не вращается. Изве-
стно, что скорость вращения ротора двигателя с незави-
симым возбуждением пропорциональна напряжению на
его щетках. При повороте ручек управления движок
потенциометра отходит от его средней точки. Чем боль-
ше угол отклонения движка, тем больше напряжение на
щетках двигателя, тем больше скорость вращения ору-
жия. С заданной скоростью оружие будет вращаться до
тех пор, пока стрелок не изменит положение ручек
управления.
У
Рис. 37. Схема связи со спелящей системой
Вторая схема связи ручек управления с оружием
установки заключается в том, что между ручками уп-
равления и оружием устанавливается следящая си-
стема (рис. 37). Она состоит из двух потенциометров П\
и П2 и усилительного устройства У. Выход усилитель-
ного устройства соединен со щетками ротора привод-
ного двигателя. В исходном положении движки потен-
циометров совпадают со средними точками потенциоме-
тров и напряжение на выходе усилителя равно нулю.
Если надо развернуть оружие на угол 0ь стрелок разво-
рачивает на этот угол ручки управления, а следова-
тельно, и связанный с ними движок потенциометра Z71.
На выходе усилителя появляется напряжение, пропор-
циональное углу 6|. Ротор двигателя начинает вра-
щаться, при этом поворачиваются и оружие и связанный
с ним движок потенциометра Пг. Скорость вращения
оружия убывает по мере возрастания угла 02- При ра-
58
венстве углов поворота ручек управления и оружия вра-
щение ротора двигателя прекращается.
Следящая система обеспечивает поворот оружия на
угол, равный углу поворота ручек управления. Скорость
вращения оружия пропорциональна углу рассогласова-
ния 6=6|—02 Чем больше угол рассогласования 6,
тем больше скорость вращения оружия. Движение ору-
жия приводит к уменьшению угла рассогласования, а
следовательно, и к уменьшению скорости вращения
оружия. Такую схему связи называют схемой связи со
следящей системой.
Рис. 38. Схемы связи прицела с оружием и ручками управ-
ления:
а — с оружием; б—с ручками управления
Выше были рассмотрены две схемы связи ручек уп-
равления с оружием. Рассмотрим теперь возможные
схемы связи прицела с ручками управления и оружием.
Прицел можно связать либо с ручками управления, либо
с оружием (рис. 38). Непосредственная связь прицела
с оружием (рис. 38, о) возможна в том случае, если
установка располагается поблизости от кабины стрелка.
Второе условие, при котором возможно осуществление
такой связи, заключается в том, что прицел должен об-
ладать подвижной визирной линией. Это значит, что ви-
зирная линия прицела может отклоняться от оси канала
ствола оружия на поправки стрельбы (углы упрежде-
ния и прицеливания), вырабатываемые счепю-решаю-
щим устройством прицела.
Если установка расположена далеко от кабины
стрелка, то прицел связывают с ручками управления
(рис. 38,6). Как правило, при этом применяется при-
цел с неподвижной визирной линией. Поправки стрель-
бы в этом случае вводятся в положение оружия, т. е.
59
ось канала ствола дополнительно отклоняется на вели- *
чину поправок от направления визирной линии. При /
связи прицела с ручцами управления можно достаточно
простыми техническими средствами осуществить, пере-
дачу управления установкой другим \членам экипажа.
Для этого достаточно к входу следящей системы уста-
новки подключить ручки управления и прицел другого
прицельного поста. • ' 7
п • . б
Рис. 39. Структурные схемы связи прицела с оружием и ручками
. управления:
а — с ручками управления; б — с оружием ,
Совокупность, силового привода и Системы дистан-
ционного управления положением оружия называют
следящим .приводом установки. По типу
следящего привода установки подразделяют на элек-
трические, гидравлические и электрогидравлические.
Электрические установки имеют электрический силовой
привод и электрическую систему управления. В гидрав-
лических установках применяют гидравлический привод
И гидравлическую систему управления. Электрогвдрав-
лические установки имеют гидравлический СИЛОВОЙ при-
вод и электрическую систему управлеЙДЯ.? ^"’-
Каждая подвижная установка niMeeT два следящих
привода, обеспечивающих перемещение оружия в двух
60
Рис. 40. Профильный огра'
ничитель стрельбы:
1 — барабан: 2 — кулачок; 3 «
каретка; 4 — выключатель
плоскостях. Для артиллерийских установок самолетов»
бомбардировщиков такими плоскостями являются вер-
тикальная и горизонтальная плоскости. В связи с этим
можно несколько конкретизировать схемы связи прице-
ла, ручек управления и оружия в установках, имеющих
следящий привод. На рис. 39 приведены структурныесхе-
мы связи прицела с оружием и ручками управления.
Принципиальные схемы управления стрельбой и пе-
резаряжанием оружия были рассмотрены в предыдущем
параграфе. • Применительно к
подвижным . установкам сле-
дует иметь в виду следующее
обстоятельство. Стволы пушек
подвижных установок при сво-
ем движении могут быть на-
правлены на отдельные части
своего самолета. Для предот-
вращения их. прострела приме-
няют так называемые про-
фильные ограничители стрель-
бы, которые, разрывают цепи
электропусков, когда стволы
пушек направлены на части
своего самолета.
На рис. 40 приведена одна
из возможных конструкций
профильного ограничителя
стрельбы \ верхней установки
самолета - бомбардировщика.
На наружной поверхности барабана 1 укреплены два
плоских кулачка 2. Их профили в определенном мас-
штабе моделируют киль самолета. Барабан 1 связан с
горизонтальным приводом оружия. На каретке 3, свя-
занной с вертикальным приводом оружия, укреплены
два концевых выключателя 4. Нормально замкнутые
контакты этих выключателей включецы последовательно
с обмотками реле стрельбы.. Если при вращении оружия
кнопка верхнего концевого выключателя попадет па
верхний профилированный кулачок барабана, то кон-
такты 5 (рис. 31) разомкнутся, реле стрельбы отпустит
и правая .пушка прекратит стрельбу. Нижний профили-
рованный, кулачок и нижний концевой выключатель раз-
рывают цепь стрельбы левой пушки.
ЖИЯ
no^^j;;R^exa низ.йй"’* к^ймШйо го,1;рб'йё д.а??
Этот:! механизм состоит ’ да/пво^'иро^дарЖ^ШЖ-й
удададайногр да :-об|йиНе,.ёа'М^ет^.^ узла рычагор/,.
утепленного да станке лафете. При’ гюдхода офуяёня-
к обшивке самолета рц*Гагр. механизма яожатей на си- *
Додай профилир'ованный -обод и принимают' нй себя на- ‘
грузку. Концевые выключатели контурного механизма,
выключают при этом приводной двигатель дардидалр- ,г
даго канала. Так механизм контурного обвбдапредот-
врагцает деформацию обшивки самолёта й стволов г;
оружия. ' ; • /•'?
:•*' Чтобы ИСКЛЮЧИТЬ ПОЛОМКИ СТВОЛОВ 9РУЖИЯ нижних i
установок при посадке самолета, применяют так назы{'
йаемые схе мы в о з в р.а т а оруж и я в по х О Д’ -,
ное Пр л о ж е й це. Эта, схецы автоматически приводят 7
оружие й походное положение после того, как стрёЛоЙ ;
.' ОпуётМ;:вЬ1ЙдаЙйтдаь дёЙствия, т. е. перестзнёТ^управ-й;
лдайуртдададай. - .
‘.’' Ддя 'исключения влияния патронной ленты на ра- ',
боду , автоматики оружия на артиллерийских установи
даЖТустанавливают механизмы подтягр л е-Н;!^-?
^Механизм подтяга ленты состоим да ‘даектр/б?ЙЙЙ'г^^Й '
редуктора и ведущей звездочки, с фрййдадаом;-ЭЙ^фй^7
двигателе !и.ех4ийзма,дадтяра;йрлучада питание при"на-
жатии на кнопку ,^еД1^ъг<;Йр.ВДёнйё ротора двигателя*;
передаётся .на*•'да^^юГ/даёэдбчку, которая пбдтяги^
вает ленту к пуЮке. Благодаря этому облегчается фД-л
бота механизма питания оружия и исключается измёнда
ние расстояния между патронами, в лёнте,'„7
Ч • Ч . '. .1 ’•♦ЛА'
Г.-Ay.: ;;
' 'У1^;5^^ВКА'У:а^10^^Йм':СЛЕДЯЩИМ -
$1 ,!:,^Эдакфй^рскйй следящий йрйвод состодада
’-Й^р#>ШёдаВ1ей системы и электр
v ,йрйв©да.’; •“, ) = : .:,. • ;,..
•? z ^ассмдарим.установку, в ко
вого привода иёподазуются эле
кого тока, а в каченье следящей;,
следящая система, -л
62
СИЛОад
>. постоя
-сельсинш
-5^^ижнад^ста5Я^^|гЙЙ^^^|Йтих-привей^
оЩй Привод #/ф9»^бнрф и * ёдед^Щйй Привод
р^^^альяого каналбйй
оДЙрЙковы. Упрощенная структурная б^^'^Я^ДлеииЯ'-
оружием в одной йб&о6тиг(рис. 41) работаетследую-
щ»м образом.' -фд. •• -••';«.• • . , • к^фгул/ > ,
С предельной станцией 1 механически связаны руй’
ки управления установкой, и роторы сельсинов-датчцйоя
точного 2 и грубого 3 Каналов? Статоры этих сельсинов
±±3-
Т=х.
электрически связаны ср статорами сельсинов-приемии-
ков 4 й 5, расположениях ра установке.
- Рис; 41. Структурная схема следящегопривода:
1— прицельная станция; 2 и 3 — сельсйцы-датч^ки; <’а 0^оЬмййМй%в]цШ^
ники; 6 ^-сервоусилитель; 7 —электромашииный усйлитёль; в привйяючгЬ
.' двигатель J\'
С роторов сельсинов-приемников снимается сипш^м
проп^(^тльйт.-уГлу поворота прицельной станций, *
и под^ется' На усидйт.ель пер^ейруо.Рока 6 (сервоуси-
литель). Усиленный им сигнал црстуйцет на электро-
машинный усилитель 7 (ЭМУ), где усиливается до мощ-
ности;, достаточной Для управлений, приводным двигдте- >
лем д/Выход ЭМУ соединен с ротором приводного,
двигателя;- .Вращр|И1е?устднрзй^ передается на роторы
сельсинов-приемников. Такая обратная связь. обеспечи-
вает, пропорцирйадьнбсть скорости движения оружия
углу р'й'ССбгласЬваний? , ' / . J
Рассмотрим- назначение, устройство и работу элемен-
тов следящего привода.
Седй-ё.й я представляет .собой индукционную эле^?
трическуй) /Ызшину переменного тока. Устройстве,
сина найомииарт устройство асинхронных Maio^ i: од- :
нокатушечной (однофазной) первичной и трехкатушеч-
ной (трехфазной) вторичной обмотками. Чаще всего
трехфазная обмотка укладывается на неподвижном ста-
торе, а однофазная — на подвижном роторе сельсина.
Соединение обмотки ротора с внешней сетью осущест-
вляется через контактные кольца. По двум кольцам,
соединенным с концами обмотки ротора, скол^ят щет-
ки, установленные на корпусе сельсина. Электрическая
схема сельсина и схема соединения сельсина-датчика с
сельсином-приемником приведены на рис. 42, а (ср —0).
Обмотка ротора сельсина-датчика питается перемен-
ным током напряжением 115 в. Переменный ток, проте-
кая по обмотке ротора, создает переменное магнитное
поле. Результирующий поток обмотки ротора Фр на-
правлен вдоль электрической оси обмотки. Пересекая
витки обмоток статора, переменный магнитный поток
наводит в каждой из них переменную ЭДС. Действую-
щее значение ЭДС в обмотках статора зависит от по-
ложения соответствующей обмотки относительно потока
Фр, т. е. от угла <р между осью данной статорной обмот-
ки и ocwq обмотки ротора.
64
Под воздействием ЭДС статорных обмоток сельсина-
датчика, соединенных со статорными обмотками сель-
сина-приемника, в тех и других возникает переменный
ток. В каждой паре последовательно соединенных кату-
шек действующее значение тока одинаково. Вектор маг-
нитных потоков статорных обмоток сельсинов является
геометрической суммой векторов магнитных потоков от-
дельных обмоток. Вектор суммарного магнитного пото-
ка статора сельсина-приемника Фгп ориентирован отно-
сительно его статорных обмоток точно так же, как век-
тор потока ротора относительно своих статорных
Рис. 43. График изменения сигнального
напряжения
обмоток. Следовательно, при повороте ротора сельсина-
датчика на некоторый угол ср (рис. 42,6) вектор магнит-
ного потока статора сельсина-приемника Фсп повернется
на такой же угол.
В переменном магнитном поле статора сельсина-при-
емника находится обмотка его ротора. На концах этой
обмотки возникает напряжение ис, величина которого
зависит от угла 0 между вектором Фсп и направлением,
перпендикулярным оси обмотки ротора. Напряжение ис,
возникающее на концах обмотки сельсина-приемника,
называют сигнальным. При изменении угла 0 меняются
величина и фаза ис. Сигнальное напряжение имеет наи-
большее значение в том случае, когда угол 0 равен 90°
(рис. 43).
Перечисленные свойства сельсинов позволяют успеш-
но использовать их для передачи угла поворота при-
цела. По сигнальному напряжению на роторе сельсина-
приемника можно установить величину и направление
3—320 65
угла поворота прицела и использовать эти сведения для
управления силовым приводом данного канала уста-
новки. Зависимость сигнального напряжения от угла
поворота прицела при малых углах рассогласования
практически линейная. При изменении угла у на 1° сиг-
нальное напряжение меняется примерно на 1 в. Однако
точность передачи угла с помощью сельсинной связи не
превосходит 1°, что явно недостаточно для стрельбы по
удаленным целям. Поэтому в каждом канале дистан-
ционного управления оружием применяют две сельсин-
ные связи: точную и грубую.
Ротор грубого сельсина-датчика поворачивается па
тот же угол, что и ручки управления, т. е. передаточное
отношение от ручек управления к ротору грубого сель-
сина-датчика равно 1:1. Ротор точного сельсина-датчи-
ка поворачивается на угол, в 31 раз превышающий
угол поворота ручек управления (прицела). Такое
включение двух сельсинных связей позволяет успешно
использовать точную связь при малых углах рассогла-
сования (до 3°), а грубую связь — при углах, превышаю-
щих 3—4°. При этом точность синхронизации оружия п
прицела будет лежать в пределах двух угловых минут
(1°:31~2'). .
Может возникнуть вопрос, нельзя ли использовать
только одну точную связь? Нельзя. В этом случае при
повороте ручек управления на угол, превышающий
5°48' (5°48'Х31 ~ 180°), ротор точного сельсина повер-
нется на угол, превышающий 180°. Изменившаяся по-
лярность сигнального напряжения вызовет вращение
оружия в сторону ближайшего согласованного положе-
ния. Эти ложные согласованные положения будут по-
вторяться через каждые 11°36' (360° : 31 = 11°36').
Сельсинная связь обеспечивает поворот оружия уста-
новки на тот же угол, что и поворот ручек управления,
т. е. обеспечивает параллельность визирной линии и
осей каналов стволов оружия. Такое прицеливание не
может обеспечить попадания снарядов в цель. Для ве-
дения точной стрельбы по цели оружие необходимо раз-
вернуть на некоторые дополнительные углы в верти?
калькой Де и горизонтальной Д₽ плоскостях. Эти углы
вырабатываются счетно-решающим устройством при-
цела и изменяют положение оружия с помощью допол-
нительных сельсинов.
66
В качестве сельсинов, предназначенных для передачи
угловых поправок Д|3 и Де, вырабатываемых прицелом,
применяются дифференциальные сельсины.
По принципу действия они не отличаются от сельсинов,
работающих в цепях связи ручек управления с установ-
кой. Основное отличие этих сельсинов от ранее рас-
смотренных заключается в том, что обмотки статора и
ротора дифференциального сельсина выполнены трех-
фазными. Статорные обмотки дифференциального сель-
сина соединяются со статорными обмотками сельсина-
Рис. 44. Схема включения дифференциальных сельсинов
датчика, а роторные обмотки — со статорными обмот-
ками сельсина-приемника (рис. 44).
Каждая из поправок стрельбы, выработанная вычис-
лителем прицела, вводится в соответствующий канал
управления как в грубую, так и в точную сельсинную
связь путем поворота роторов дифференциальных сель-
синов. Для этой цели в вычислителях прицелов приме-
няются двигатели отработки суммарных поправок. Если
ротор дифференциального сельсина не развернут отно-
сительно своего статора, то дифференциальный сельсин
не оказывает влияния на величину передаваемого
угла <р (угла поворота прицела). Если же ротор диффе-
ренциального сельсина развернут относительно своего
3» 67
статора на угол +Де, то угол, переданный на ротор
сельсина-приемника системы дистанционного управле-
ния, будет равен сумме углов: tp+Де. Поворот ротора
дифференциального сельсина вызовет дополнительный
поворот оружия установки на угол, соответствующий
введенной поправке Де.
Напряжения, снимаемые с роторов сельсинов-при-
емников системы дистанционного управления, посту-
пают на усилитель сигнального напряжения — серво-
усилитель.
Сервоусилитель является низкочастотным фазо-
чувствительным усилителем мощности. Он выпрямляет и
усиливает слабые сигнальные напряжения переменного
тока, поступающие от роторов сельсинов-приемников
В зависимости от угла рассогласования сервоусилитель
автоматически подключается либо к грубой, либо к точ-
ной сельсинной связи. Каждый канал системы дистан-
ционного управления имеет свой сервоусилитель, выход
которого подключается к управляющим обмоткам
своего электромашинного усилителя.
В соответствии с решаемыми задачами в схеме сер-
воусилителя имеются следующие основные каскады
(рис. 45);
— каскад усиления сигналов точной сельсинной свя-
зи (усилитель мощности),
— каскад усиления сигналов грубой сельсинной
связи;
— селекторный каскад.
Каскад усиления сигналов точной сельсинной связи
собран на лампах Л} и Л2. Это балансный фазоч встви-
тельный усилитель. Напряжение на ацоды ламп Л, и Л2
поступает со вторичных обмоток W2 и №3 силового
трансформатора Тр}. Они обеспечивают одинаковую
фазу и величину питающего напряжения на анодах
ламп Л\ и Л2.
Между питающими обмотками и катодами ламп
включены управляющие обмотки УО1 и УО2 электрома-
шинного усилителя. Для сглаживания пульсации тока
параллельно этим обмоткам подсоединены конденсато-
ры С[ и С2. Сигнальное напряжение, снимаемое с рото-
ра сельсина-приемника точной сельсинной связи (РПТ),
поступает на первичную обмотку входного трансформа
тора Тр2. Если сигнальное напряжение на первичной
68
обмотке этого трансформатора отсутствует, то потен-
циалы сеток ламп Л\ и Л2 одинаковы. Во время положи-
тельного полупериода анодного напряжения через лам-
пы, а следовательно, и через управляющие обмотки
„ w>
К ротору
грубой связи
Рис. 45. Упрошенная принципиальная электросхема ссриоусилителя
фз
электромашинного усилителя будут протекать одинако-
вые токи. При этом выходное напряжение ЭМУ равно
нулю. Приводной электродвигатель и оружие не будут
вращаться.
69
Если на первичную обмотку Тр2 поступит сигнальное
напряжение, то на его вторичных обмотках 1Е2 и 1Е3 воз-
никнет ЭДС, которая изменит потенциалы сеток
ламп JIi и Л2. На рис. 45 показано, что обмотки 1^2 и
и^з включены так, что напряжения на сетках ламп сдви-
нуты по фазе на 180°. В положительный полупериод
анодного напряжения на сетке лампы одного плеча бу-
дет положительный потенциал, а на сетке лампы дру-
гого плеча — отрицательный. Это приведет к возраста-
нию тока в первом плече и уменьшению во втором.
При нарушении равновесия в плечах моста разность
токов в управляющих обмотках УО] и УО2 не будет
равна нулю. Следовательно, появятся результирующий
магнитный поток этих обмоток и выходное напряже-
ние ЭМУ, пропорциональное входному сигналу. Двига-
тель начнет вращать оружие и связанные с ним роторы
сельсинов-приемников в сторону уменьшения угла рас-
согласования. Напряжение на первичной обмотке вход-
ного трансформатора каскада снизится, и приводной
двигатель уменьшит скорость вращения оружия.
Напряжение с ротора сельсина-приемника грубой
сельсинной связи подается на входной трансформа-
тор Тр3. Предварительный усилитель сигналов грубой
сельсинной связи собран на лампе Л3. Анодное напря-
жение на нее поступает с обмоток Wt и W2 трансфор-
матора Тр4. Общая точка этих обмоток подсоединена
к обмотке силового трансформатора Tpi. При отсут-
ствии сигнального напряжения на первичной обмотке
трансформатора Тр3 в положительный полупериод пи-
тающего напряжения через аноды лампы Л3 протекают
одинаковые токи. Поэтому обмотки и W2 трансфор-
матора связи создают равные по величине и противо-
положные по направлению магнитные потоки. Резуль-
тирующий магнитный поток трансформатора при этом
равен нулю, а следовательно, и на его вторичных об-
- мотках напряжение равно нулю.
Если на входной трансформатор каскада поступит
сигнальное напряжение, то на сетки лампы Л3 будут
поданы равные по величине и противоположные по фазе
сигналы. При этом анодный ток одного триода увели-
чится, а второго уменьшится. Разность токов, а следо-
вательно, и результирующий магнитный поток обмо-
ток Wi и 1^2 не будут равны нулю. Во вторичных об-
70
мотках трансформатора связи появятся напряжения,
сдвинутые по фазе на 180° одно относительно другого.
Коэффициент усиления каскада выбран таким обра-
зом, чтобы напряжение на обмотках 1Е3 и 1Е4 трансфор-
матора Тр4 в момент подключения к усилителю точной
сельсинной связи было бы примерно равно сигналу, сни-
маемому с обмоток W2 и У7з трансформатора Тр2. Вы-
полнение этого условия исключает резкое изменение
скорости вращения ротора приводного двигателя при
переключении усилителя с точной сельсинной связи на
грубую, и наоборот.
Переключение входа сервоусилителя с одного кана-
ла сельсинной связи на другой осуществляется селек-
торным каскадом, собранным на лампах Л4 и Л5.
Исполнительным звеном каскада является реле Pi, вклю-
ченное в анодную цепь тиратрона Л5. На сетку лам-
пы Л5 от специального выпрямителя подаются отрица-
тельное напряжение и управляющий сигнал. Реле Pi
может сработать только при зажжении тиратрона, т. е.
при условии, что управляющий сигнал больше отрица-
тельного смещения. В качестве управляющего сигнала,
подаваемого на сетку лампы Л5, используется напряже-
ние, снимаемое со вторичных обмоток 1Е2 и 1Е3 входного
трансформатора грубой сельсинной связи. Это напря-
жение детектируется лампой Л4. Сигнал на сетку тира-
трона поступает с нагрузки детектора /?7.
Если нет сигнала на первичной обмотке Тр3, т. е.
при отсутствии угла рассогласования, на сетку тиратро-
на подается лишь одно отрицательное смещение. При
появлении угла рассогласования на обмотке IE, транс-
форматора Трз появляется сигнальное напряжение. Сле-
довательно, появляется сигнал и на его вторичных об-
мотках. По мере увеличения угла рассогласования это
напряжение растет, и при угле рассогласования свы-
ше 3° напряжение управляющего сигнала с га нет боль-
ше отрицательного смещения на сетке тиратрона. Тира-
трон зажжется, и реле сработает. При этом шмкпутся
контакты /С] этого реле в цепях вторичных обмоток Tpt
п разомкнутся контакты в цепи вторичных обмоток
[рансформатора Тр2. Вход сервоусилшсля переключит-
ся с точной сельсинной связи па ipyfiyio.
Селекторный каскад, кроме переключения входа
сервоусилителя, при углах рассогласования, превышаю-
71
щих 3°, разрывает цепи стрельбы, так как стрельба в
этом случае не имеет смысла. Разрыв цепей стрельбы
производится нормально замкнутыми контактами ре-
ле Pi.
Выше было указано, что скорость вращения уста-
новки всегда пропорциональна углу рассогласования.
Такая ^зависимость скорости вращения выгодна только
тогда, когда стрелок следит оружием за целью. Часто
возникает необходимость вращения установки с макси-
мально возможной угловой скоростью (согласование в
момент начала слежения, переброс оружия и т. д.). Для
обеспечения большой скорости вращения в сервоусили-
теле имеется релейное устройство, которое при углах
рассогласования, больших 10—12°, последовательно с
выходом электромашинного усилителя подключает бор-
товую сеть самолета. При этом на якорь приводного
двигателя подается суммарное напряжение. Скорость
вращения оружия резко возрастает.
Артиллерийская установка, как и любое другое тело,
обладает инерцией. Поэтому процесс согласования но-
сит колебательный характер. Для уменьшения числа
колебаний оружия около согласованного положения
служит цепь стабилизации (рис. 46). Стабилизирующая
цепь состоит из конденсатора С4 и сопротивления R\?.
(Элементы этой схемы обозначены соответственно эле-
ментам схемы сервоусилителя.) Они включены последо-
вательно с якорем приводного двигателя и соединяют
вход усилителя мощности сервоусилителя (точки а и б
на рис 45) с якорем приводного двигателя.
Цепь стабилизации является обратной связью, изме-
няющей напряжение на входе усилителя мощности (Л[
и Л2) при любом изменении напряжения на якоре при-
водного двигателя. Действительно, любое изменение на-
пряжения на якоре двигателя Д приведет к изменению
напряжения на обкладках конденсатора С4. Это в свою
очередь вызовет появление тока конденсатора ic (путь
тока на схеме обозначен стрелками). Если стрелок уве-
личит угол поворота ручек управления, то возрастет
напряжение на выходе ЭМУ и на щетках якоря привод-
ного двигателя. Приращение напряжения вызовет по-
вышение напряжения на обкладках конденсатора С4.
Зарядный ток ic, проходя через сопротивления Дю и Ди,
увеличит потенциал сетки лампы Л} и уменьшит потен-
72
циал сетки лампы Л2. В этом случае цепь стабилизации
действует согласно с сигналом рассогласования и уси-
ливает его. Если стрелок вращает ручки управления в
сторону уменьшения угла рассогласования, то напряже-
ние на приводном двигателе падает. При этом умень-
шается напряжение на обкладках С4 и ток ic препятст-
вует уменьшению скорости вращения двигателя.
Предположим, что установка подходит к согласован-
ному положению. Сигнал рассогласования убывает. На-
Рис. 46. Электросхема цепи стабилизации
пряжение на двигателе уменьшается. Конденсатор С4
разряжается и поддерживает на лампе Л\ положитель-
ный потенциал. В этом случае цепочка стабилизации
способствует сохранению движения установки в направ-
лении подхода к согласованному положению По инер-
ции оружие пройдет согласованное положение В этом
случае фаза сигнала рассогласования изменится на 180°,
начнет возрастать и его величина Однако разряд кон-
денсатора С4 к этому времени еще не закончится, и на-
пряжение на сопротивлениях /?|() и /\’ц но знаку будет
обратным сигнальному. Вследствие этого установка
начнет тормозиться. Благодаря воздействию цепочки
73
стабилизации оружие остановится в согласованном по-
ложении после двух-трех колебаний.
Исполнительным элементом электрического следя-
щего привода является электродвигатель. Он пре-
образует электрическую энергию в механическую. Прин-
цип действия электродвигателя основан на законе элек-
тромагнитной индукции. Сущность его заключается в
следующем.
Если в однородное магнитное поле помещен прямо-
линейный проводник, по которому течет электрический
юк, то в результате взаимодействия магнитных полей
Рис. 47. Принципиальные схемы электродвигателей:
а — с параллельным возбуждением; б — с независимым возбужде-
нием; в— с последовательным возбуждением; г — со смешанным воз-
буждением
на проводник будет действовать сила, стремящаяся вы-
толкнуть его из магнитного поля. Величина этой силы
f=BIl,
где В—магнитная индукция, ас;
I — сила тока в проводнике, а;
I—активная длина проводника, см.
Электродвигатели подразделяются на двигатели пе-
ременного и постоянного тока. Наибольшее распростра-
нение в качестве исполнительных элементов силового
привода артиллерийских установок нашли электродви-
гатели постоянного тока. В зависимости от способа со-
единения обмоток различают двигатели (рис. 47):
— с параллельным возбуждением;
— с независимым возбуждением;
— с последовательным возбуждением;
— со смешанным возбуждением.
74
Каждый из указанных видов двигателей обладает
своими характеристиками. С точки зрения применения
двигателя в качестве исполнительного элемента привода
установки наиболее подходящим является электродви-
гатель с независимым возбуждением (рис. 48).
Момент на валу двигателя этого вида пропорциона-
лен току якоря. Чем больше ток, тем больше можно на-
гружать двигатель. При этом ток в обметке возбужде-
ния не зависит от нагрузки двигателя. Очень важным
качеством двигателя с независимым возбуждением яв-
ляется то, чТо число оборотов двигателя мало изменяет-
ся при изменении нагрузки. Говорят, что этот двигатель
r9
Рис. 48. Схема электродвигателя с независимым
возбуждением
обладает жесткой характеристикой. Наличие двух изо-
лированных обмоток позволяет питать электродвигатель
от двух различных источников электрической энергии.
Известно, что число оборотов ротора электродвига-
теля зависит от величины напряжения, подводимого к
его обмотке. Последнее можно менять двумя способа-
ми. При постоянном питающем напряжении нужно ме-
нять величину сопротивления, включенного последова-
тельно с обмоткой якоря (рис. 48). При увеличении RB
число оборотов якоря падает. Такая схема регулирова-
ния не позволяет получить широкого диапазона измене-
ния оборотов якоря электродвигателя, а полому она не
нашла применения в приводах установок. Нолес прием-
темой схемой регулирования является схем i в ко юрой
тля питания якоря электродвигателя нспо'П. ivctch
источник тока с регулируемым напряжением — специ-
1льный генератор постоянного тока, называемый элек-
ромашинным усилителем (рис. 49)
Электромашинвый устптель представляет собой
электрический агрегат, в котором объединены генера-
75
тор-усилитель и двигатель. Якорь генератора приводит-
ся во вращение электродвигателем Д. Конструктивно
генератор-усилитель и приводной электродвигатель объ-
единяются в одном корпусе. Якорь двигателя и якорь
генератора монтируются на одном валу. От обычного
генератора постоянного тока генератор ЭМУ отличается
добавочной парой щеток Л1 Л2 и подмагничивающей
обмоткой, подсоединенной к этим щеткам. Кроме обыч-
ной обмотки возбуждения, называемой управляющей об-
моткой (УО), на статоре имеется компенсационная об-
Рис. 49. Схема электромашинного усилителя
мотка (ДО), подсоединенная последовательно с нагруз-
кой ко второй паре щеток Вх В2. Управляющая обмотка
состоит из двух одинаковых половин: УО] и УО2, по ко-
торым протекают анодные токи ламп Л, и Л2 (рис. 45).
Управляющий поток Ф\ электромашинного усилителя
создается разностью токов в УО\ и УО2. Если разность
токов 1\—/2 не равна нулю, то и управляющий по-
ток Ф\ не равен нулю. При Л>/2 направление магнит-
ного потока соответствует направлению, указанному на
рис. 49 Если /]</2, то направление потока изменяется
па 180°. Вместе с изменением направления управляю-
щего потока меняется и полярность выходного напряже-
ния ЭМУ. Величина выходного напряжения при по-
стоянных оборотах якоря генератора зависит от вели-
76
чины потока Фь Управляющий поток направлен по про-
дольной оси генератора.
В витках якоря, вращающихся в потоке Ф\, возни-
кает ЭДС, которая снимается щетками Ai Аг. Эта ЭДС
наводит в витках подмагничивающей обмотки ток, ко-
торый создает магнитный поток Ф2, направленный по
поперечной оси генератора. Действие этого потока при-
водит к тому, что в витках якоря возникает новая ЭДС,
которая снимается щетками В} В2, расположенными на
продольной оси электромагнитного усилителя. Так как
к щеткам В, В2 подсоединяется внешняя нагрузка (при-
водной двигатель установки), то через витки якоря про-
текает ток, который создает свое магнитное поле. По-
ток Ф3 направлен по продольной оси ЭМУ навстре-
чу управляющему потоку Фр
Чтобы устранить влияние этого потока, ток нагрузки
пропускают через компенсационную обмотку КО. Маг-
нитный поток этой обмотки Ф4 направлен навстречу по-
току Ф3 и ликвидирует его отрицательное воздействие
на поток Ф|. Величину потока Ф4 можно регулировать
сопротивлением R. Чем больше это сопротивление, тем
больше величина потока компенсирующей обмотки.
Компенсация потока Ф3 должна быть очень точной.
Если Ф3>Ф4 (недокомпенссщия), то выходное напря-
жение электромашинного усилителя будет падать при
увеличении тока нагрузки. При Ф4>Ф3 (перекомпенса-
ция) вместе с увеличением тока нагрузки растет выход-
ное напряжение ЭМУ. Это очень вредно, так как выход-
ное напряжение ЭМУ становится независимым от угла
рассогласования. Только при Ф3 = Ф4 выходное напря-
жение ЭМУ пропорционально углу рассогласования и
не зависит от тока нагрузки.
Электромашинные усилители нашли широкое приме-
нение в следящем приводе артиллерийских установок
благодаря тому, что они обладают малой инерционно-
стью и большим коэффициентом усиления. Выходное на-
пряжение ЭМУ пропорционально потоку управления и
изменяется вместе с ним, не отставая щмстпо от него.
При полной нагрузке ЭМУ, обладающего мощно-
стью 1 кет, ток управляющей обмотки составляет не-
сколько миллиампер.
ЭМУ можно представить, как двухкаскадный усилн-
гель: первый каскад — управляющая обмотка (обмотка
77
подмагничивания), второй каскад — подмагничивающая
обмотка (внешняя цепь). Общий коэффициент усиле-
ния ЭМУ достигает 10 000.
§ 11. УСТАНОВКА С ЭЛ ЕКТРОГИДРАВЛ ИЧЕСКИМ
СЛЕДЯЩИМ ПРИВОДОМ
В качестве примера установки с электрогидравличе-
ским следящим приводом рассмотрим установку, имею-
щую потенциометрическую следящую систему и гидрав-
лический силовой привод (рис. 50). На схеме показано,
Рис. 50. Структурная схема следящего привода:
1 — ручки управления; 2 — установка; 3 — потенциометрический мост;
tf —• прицел; 5 — дифференциал; 6 — усилитель; 7 — исполнительный
механизм; 8 — гидронасос; 9 — гидро мотор
что между ручками управления 1 и оружием установ-
ки 2 включена следящая потенциометрическая система.
Прицел 4, связанный с установкой механической пере-
дачей, следит за оружием.
Потенциометрический мост 3 следящей системы со-
стоит из пшенциометра-датчика ПД и потенциометра-
78
приемника ПП. Движок потенциометра-датчика соеди-
нен с ручками управления через дифференциал 5.
Дифференциал предназначен для обратной связи
между ручками управления и установкой. Его шестер-
ня I соединена с ручками управления, а шестерня 11 —
с оружием. Поводок дифференциала свободно сидит на
оси вращения этих шестерен. Шестерня III дифферен-
циала сцеплена с шестернями I и II. Она свободно сидит
на поводке. Соединение движка потенциометра-датчика
с поводком дифференциала обеспечивает поворот по-
следнего на угол, равный разности углов поворота ру-
чек управления а и оружия (3. Эта разность (а—₽) пред-
ставляет собой угол рассогласования между ручками
управления и оружием. В исходном положении движок
потенциометра-датчика совпадает со средней точкой
своего потенциометра. В этом случае оружие находится
в согласованном с ручками управления положении: а=
= Р=0. Если воздушный стрелок резко отклонит ручки
управления на угол а, движок потенциометра-датчика
при неподвижной шестерне II дифференциала также от-
клонится на угол а. Между движками ПД и ПП воз-
никнет сигнальное напряжение ис. Это напряжение по-
ступает на вход усилителя 6 переменного тока. В соот-
ветствии с сигналом усилителя, пропорциональным
в данном случае направлению и углу поворота ручек
управления, исполнительный механизм 7 воздействует
на гидронасос 8. В качестве гидронасоса в данной уста-
новке используется насос с наклонным блоком цилин-
дров. Его производительность пропорциональна углу
наклона блока цилиндров. Поворот блока цилиндров
осуществляется выходным валом исполнительного ме-
ханизма.
На рис. 50 показано, что выходной вал исполнитель-
ного устройства связан не только с гидронасосом, но и
с движком потенциометра-приемника. Следовательно,
сигнальное напряжение ис вызывает поворот блока ци-
линдров, что приводит к увеличению производительно-
сти гидронасоса, и смещение движка иотенцпомстра-
приемника, что приводит к уменьшению сигнального
напряжения. С уменьшением напряжения ис снижается
скорость поворота блока цилиндров гидронасоса. По-
ворот блока цилиндров насоса прекратится, когда угол
поворота движка ПП станет равным углу поворота
79
движка ПД, т. е. при а = у. В этот момент сигнальное
напряжение нс = 0; движение выходного вала исполни-
тельного механизма прекращается.
Обороты гидромотора 9, приводящего в движение
оружие, зависят от производительности гидронасоса.
Следовательно, скорость оружия нарастает с момента
разворота ручек управления и достигает некоторого
максимального значения, соответствующего углу накло-
на блока цилиндров. Если бы не было связи оружия с
движком потенциометра-датчика, то обороты гидро-
мотора, а следовательно, и скорость поворота оружия
оставались бы постоянными. Но так как поворот ору-
жия на угол р передается на прицел и шестерню II
дифференциала, то угол поворота движка потенциомет-
ра-датчика уменьшается на величину угла |3. Движок
потенциометра-датчика при увеличении угла |3 возвра-
щается к средней точке.
Перемещение движка потенциометра-датчика от по-
ложения а = т вновь приводит к появлению сигнального
напряжения ис. Однако фаза этого напряжения будет
противоположна фазе напряжения, вызвавшего поворот
выходного вала исполнительного механизма на угол у.
Появившееся сигнальное напряжение является причи-
ной поворота выходного вала исполнительного меха-
низма в сторону уменьшения угла наклона блока цилин-
дров гидронасоса. При этом движок потенциометра-
приемника будет возвращаться к средней точке своего
потенциометра, т. е. следовать за движком потенцио-
метра-датчика. Это в свою очередь приводит к умень-
шению сигнального напряжения ис, т. е. к уменьшению
скорости наклона блока цилиндров насоса. По мере
уменьшения угла наклона у падают производительность
гидронасоса и обороты гидромотора. К согласованному
положению оружие приходит на малой скорости.
В тот момент, когда угол поворота оружия [3 станет
равным углу поворота ручек управления а, движок по-
тенциометра-датчика совместится с его средней точкой.
Спустя некоторое время аналогичное положение займет
и движок потенциометра-приемника. Это будет соответ-
ствовать нулевому углу наклона блока цилиндров.
Установка должна остановиться. Для сокращения вре-
мени успокоения оружия около заданного положения в
усилителе предусмотрены демпфирующие элементы.
80
Рассмотрим устройство и работу систем и агрегатов,
изображенных на рис. 50.
Следящая система каждого канала управления со-
стоит из потенциометрического моста 3, усилителя 6 пе-
ременного тока и исполнительного механизма 7. В рас-
сматриваемой установке следящая система служит для
дистанционного управления углом наклона насоса и
тем самым скоростью вращения оружия. Основой сле-
дящей системы является потенциометрический мост,
состоящий из потенциометра-датчика и потенциометра-
приемника. Оба потенциометра имеют одинаковое со-
противление, длину и шаг намотки. Они питаются от
источника переменного тока. Напряжение на движке за-
висит от угла отклонения его от средней точки своего
потенциометра, а фаза — от направления отклонения ру-
чек управления, т. е. от направления отклонения движка
от средней точки потенциометра-датчика.
Величина напряжения ис, подаваемого на вход уси-
лителя следящей системы, зависит от разности потен-
циалов движков потенциометров. Напряжение рассо-
гласования отсутствует, если движки отклонены на один
и тот же угол от средней точки потенциометров. Фаза
напряжения рассогласования зависит от знака разности
а—р—у углов отклонения движков. При переходе этой
разности от положительного значения к отрицательному
фаза напряжения ис меняется на 180°.
Итак, по сигнальному напряжению ис можно судить
о величине рассогласования движков потенциометров и
знаке этого рассогласования. Величина этого напряже-
ния определяет скорость поворота выходного вала ис-
полнительного механизма, а фаза — направление пово-
рота.
Усилитель, упрощенная принципиальная схема ко-
торого приведена на рис. 51, является фазочувствптель-
ным усилителем переменного тока. Он сосгош из усили-
теля сигналов рассогласования и фазового детектора
(распознавателя). Усилитель сигналов рассогласования
собран на лецрм триоде лампы Ль Движок iioieiuuio-
метра-датчика соединен через ограничительное сопро-
тивление Ri с сеткой триода. Движок погенциометра-
приемника соединен с катодом лампы Л}. Переменное
напряжение ис, поданное на сетку и катод левого три-
ода лампы Ль усиливается. Переменная составляющая
81
анодного напряжения, выделенная на сопротивлении
нагрузки Т?2, противоположна по фазе напряжению ис.
Чтобы согласовать по фазе усиленное напряжение
с сигналом рассогласования ис, анод левого триода со-
единяют с сеткой правого через конденсатор С! и со-
противление /?з. Усиленное и согласованное по фазе сиг-
Рис. 51. Упрощенная принципиальная электросхема уси-
лителя
нальное напряжение поступает на сетки лампы Лг. Эта
лампа, являющаяся двойным триодом, выполняет роль
фазового детектора. Аноды лампы Л2 подсоединены
ко вторичным обмоткам силового трансформатора Тр\.
Па рис. 51 показано, что полярность анодного напря-
жения левого триода противоположна полярности пра-
вого грпода. Вторичные обмотки трансформатора Tpt
82
соединены также с обмотками реле Л и Р2- Обмотка
каждого реле шунтирована цепочкой, состоящей из кон-
денсатора С2 (С3) и сопротивления Ps (Re). Эти це-
почки обеспечивают сглаживание тока в обмотках реле.
В зависимости от знака разности а—[3—у углов раз-
ворота движков усиленное сигнальное напряжение ока-
зывается в фазе с напряжением либо на левом, либо
на правом триоде. Во время положительной полуволны
напряжение ис, приложенное к сеткам лампы Л2, обес-
печивает прохождение тока через один из триодов лам-
пы. Реле, включенное в цепь этого триода, срабатывает
и своими контактами замыкает цепь питания одной из
обмоток реверсивной электромагнитной муфты 2
(рис. 52). Электродвигатель исполнительного механизма
начнет наклонять блок цилиндров гидронасоса. При пе-
реходе фазы сигнального напряжения на противополож-
ную сработает второе реле и блок цилиндров будет от-
клоняться в другую сторону или возвращаться к исход-
ному положению.
Такая работа усилителя и его исполнительных ре-
ле Р\ и Р2 "происходит только при больших значениях
разности а -₽—у. При подходе движков потенциометров
к согласованному положению исполнительные реле уси-
лителя начинают работать в вибрационном режиме. Та-
кой режим работы обеспечивается связью сетки правого
триода лампы Л\ с источником высокого напряжения ил.
Она осуществляется по цепи: сопротивление R&, нор-
мально разомкнутые контакты или К2 и сопротивле-
ние /?ю. По своей физической сущности такая связь
является обратной положительной связью, уменьшаю-
щей коэффициент усиления усилителя, собранного на
лампе Л}.
При срабатывании исполнительного реле усилителя
замыкаются его контакты и на сетку правого триода
лампы Л} поступает напряжение иа. Однако напряжение
на сетке правого триода лампы Л1 увелнчшся не мгно-
венно, а через некоторое время, определяемое элемен-
том задержки. Он состоит из сопротивления /?н и кон-
денсатора С5. Увеличение напряжения па сетке правого
триода приведет к уменьшению амплитуды сигнала на
сетке триода фазового детектора, и реле отпустит, ра-
зомкнув контакты в цепи правой сетки лампы Лс. По-
сле размыкания контактов конденсатор С5 будет разря-
83
жаться на сопротивление R}i. Рабочая точка правого
триода будет смещаться влево, коэффициент усиления
каскада — возрастать. В положительный полупериод
сигнального напряжения исполнительное реле вновь
сработает.
При увеличении рассогласования между движками
потенциометров увеличивается амплитуда сигнального
напряжения, подаваемого на правую сетку лампы Ль
Это приводит к уменьшению времени разомкнутого со-
Рис. 52. Схема исполнительного механизма:
1 — электродвигатель; 2 — реверсивная муфта; 3 — редуктор; 4 — элек-
тромагнитный тормоз; 5 — потенциометр-приемник; 6, 7, 8, 9, 10, 12 —
шестерни; 13, 14 — электромагниты; 11 — якорь, 15 — возвратные пружи-
ны; 16 — рычаг; 17 — диск; 18 — якорь; 19 — пружина; 2Q — обмотка элек
тромагнита
стояния контактов исполнительного реле и увеличению
времени замкнутого состояния. При дальнейшем увели-
чении рассогласования положительное смещение, пода-
ваемое на правую сетку лампы Ль не может привести
к отпусканию исполнительного реле. Его контакты будут
замкнуты, обеспечивая непрерывное вращение выход-
ного вала исполнительного механизма.
Исполнительный механизм 7 (рис. 50)
предназначен для наклона блока цилиндров гидро-
насоса. Механизм состоит из следующих основных узлов
(рис. 52): электродвигателя 1, электромагнитной ревер-
84
сивной муфты 2, редуктора 3, электромагнитного тор-
моза 4. В корпусе исполнительного механизма располо-
жен потенциометр-приемник 5. На валу электродвига-
теля постоянного тока неподвижно посажены две ше-
стерни 6 и 7. Шестерня 6 входит в зацепление с ше-
стерней 8 электромагнитной муфты. Шестерня 7 соеди-
нена с шестерней 9 не непосредственно, а через проме-
жуточную шестерню 10 (на схеме не показана).
Электромагнитная реверсивная муфта предназначена
для изменения направления вращения выходного вала
исполнительного механизма. Опа состоит из двух элек-
тромагнитов 13 и 14, двух шестерен 9 и 8, свободно
вращающихся на оси реверсивной муфты, якоря 11 и
выходной шестерни 12. При отсутствии тока в обмотках
электромагнитов якорь муфты удерживается пружина-
ми 15 в нейтральном положении. Он не касается ше-
стерен 8 и 9. Якорь муфты может свободно переме-
щаться вдоль вала муфты и вращаться вместе с валом.
Вращение якоря передается валу через шпонку, закреп-
ленную на валу муфты.
Во время работы электродвигателя шестерни 8 и 9
вращаются в разные стороны. Благодаря этому обеспе-
чивается изменение направления вращения выходной ше-
стерни муфты. Если подать ток в обмотку левого элек-
тромагнита, то якорь // прижмется к левой шестер-
не 9 и вращение вала двигателя будет передано валу
муфты. Предположим, что шестерня 12 стала вращать-
ся по часовой стрелке. Если же подать ток в обмотку
правого электромагнита, то якорь прижмется к шестер-
не 8, которая вращается в направлении, противополож-
ном направлению вращения шестерни 9. Выходная ше-
стерня муфты будет вращаться против часовой стрелки.
Для уменьшения числа оборотов выходною вала ис-
полнительного механизма между электромагпп гной муф-
той и выходным валом установлен редуктор 3. На вы-
ходном валу редуктора укреплен рычаг 16, который по-
средством тяги соединяется с распредели тельным ди-
ском блока цилиндров гидронасоса.
Для исключения влияния инерции вращающихся де-
талей исполнительного механизма на работу следящей
системы в момент согласования движков потенциомет-
ров на оси редуктора уста воплей электромагнитный тор-
моз. Его задача: остановить выходной вал механизма
85
в момент прекращения подачи тока в обмотку электро-
магнита 13 или 14 реверсивной муфты 2.
Тормоз состоит из диска 17, соединенного с проме-
жуточным валом редуктора, якоря 18, пружины 19 и
обмотки электромагнита 20. Если обмотка электромаг-
нита обесточена, то якорь 18 прижимается к диску 17
и препятствует вращению промежуточного вала редук-
тора. При подаче тока в обмотку электромагнита якорь,
сжимая пружину 19, втягивается внутрь электромагнита
и освобождает диск 17. Подача питания на обмотки
электродвигателя 1, обмотки электромагнитов 13 и 14
Рис. 53. Схема гидропривода с дросселем:
7 — гидрокран; 2 — гидромотор; 3 — гидроаккумулятор; 4 — бачок;
5 — ручки управления
реверсивной муфты, а также в обмотку электромагнита
тормоза 20 обеспечивается лишь после срабатывания
одного из исполнительных реле усилителя следящей си-
стемы.
Питание электродвигателя осуществляется через кон-
такты силового реле, которое включается при срабаты-
вании любого исполнительного реле. Каждая обмотка
электромагнитов реверсивной муфты питается через
контакты своего исполнительного реле. Растормажива-
ние промежуточного вала редуктора происходит при
подаче питания на электродвигатель.
Гидравлический привод установки состоит из гидро-
насоса и гидродвигателя. Гидронасос нагнетает рабочее
тело (жидкость) в гидродвигатель.
В подвижных артиллерийских установках применяют
две схемы гидравлического привода: привод с дроссе-
лем и привод с насосом переменной производительно-
сти. Принципиальная схема гидропривода с дроссе-
лем приведена на рис. 53. Такой привод состоит из
86
дросселя (гидрокрана) 1, гидромотора 2, гидроаккуму-
лятора 3, бачка 4 и трубопроводов, соединяющих от-
дельные узлы привода.
Ручки управления установкой соединяются с пласти-
ной дросселя. При повороте ручек управления по часо-
вой стрелке жидкость из гидроаккумулятора поступает
в гидромотор по нижнему трубопроводу. Из гидромото-
ра жидкость попадает в сливной бачок по верхнему
трубопроводу. В пределах некоторого угла поворота ру-
чек управления скорость вращения оружия зависит от
положения ручек управления. В гидроаккумуляторе
должно поддерживаться постоянное давление жидкости.
Рис. 54. Схема гидропривода с насосом переменной производитель-
ности:
1 — гидронасос; 2 — электродвигатель; 3 — ручки управления; # —
гидромотор
На рис. 54 приведена принципиальная схема сило-
вого гидропривода с насосом переменной производи-
тельности Гидронасос получает энергию от электро-
двигателя 2, ротор которого вращается с постоянной
угловой скоростью. Ручки управления 3 установкой свя-
заны с гидронасосом. Величина и направление угла от-
клонения ручек управления определяют производитель-
ность гидронасоса и направление подачи жидкости.
Угловая скорость ротора гидромотора 4, а следователь-
но, и скорость вращения оружия пропорциональны про-
изводительности гидронасоса.
Известно несколько типов гидронасосов: шестеренча-
тые, винтовые, поршневые, ротациоппо лопастные и ро-
тационно поршневые. Последние получили наиболее
широкое применение в силовом гидравлическом приводе
артиллерийских установок Ротационно-поршневые на-
сосы подразделяются на несколько видов. В силовом
87
приводе рассматриваемой установки применяется гидро-
насос с наклонным блоком цилиндров. Кинематическая
схема такого насоса изображена на рис. 55.
В цилиндрах 1 блока 2 расположены поршни 3, со-
единенные с помощью шатунов 4 с шайбой 5. Шайба 5
и блок 2 являются ротором гидронасоса. Они вращают-
ся электродвигателем с постоянной угловой скоростью.
Сочетание блока и цилиндров носит название «блок
цилиндров». Блок цилиндров вращается вокруг своей
Рис. 55. Кинематическая схема гидронасоса:
1 — цилиндр, 2 — блок цилиндров; 3 — поршень; 4 — шатун; 5 — шайба; 6 —
распределительный диск
продольной оси вместе с шайбой и может менять свое
положение относительно шайбы, т. е. изменять угол у
между осью вращения шайбы и продольной осью блока
цилиндров. Наклон блока цилиндров осуществляется с
помощью тяги, соединенной с выходным валом исполни-
тельного механизма.
Если угол у равен нулю, то плоскость шайбы 5 па-
раллельна правому торцу блока цилиндров. В этом слу-
чае при вращении шайбы поршни 3 не совершают дви-
жения относительно блока цилиндров. Производитель-
ность насоса равна нулю. Оружие установки находится
в неподвижном положении. Предположим, что стрелок
развернул ручку управления установкой так, что блок
цилиндров наклонился на некоторый угол у. В этом
случае при вращении шайбы и блока цилиндров будет
происходить перемещение поршней относительно своих
цилиндров. Так, поршень а, находящийся в нижнем по-
88
ложении, при движении в крайнее верхнее положение
будет перемещаться вправо. В это же время поршень б
будет перемещаться влево. Если камеру (цилиндр) порш-
ня а соединить с бачком, в котором находится рабочее
тело (жидкость), то при движении вправо поршень а бу-
дет всасывать. Поршень б при движении влево будет
выдавливать жидкость из своего цилиндра в маги-
страль, соединяющую гидронасос с гидромотором.
Чтобы обеспечить непрерывное всасывание и нагне-
тание рабочей жидкости, левый торец блока цилиндров
соединяют с неподвижным распределительным диском 6.
На этом диске имеются две выточки виг. Выточка в
соединена с магистралью нагнетания, а выточка г —
с бачком. Между выточками имеются две перемычки,
которые разделяют магистрали высокого и низкого дав-
ления.
Производительность гидронасоса с наклонным бло-
ком цилиндров зависит от диаметра цилиндров d, вели-
чины хода поршней h, числа цилиндров К. и числа обо-
ротов шайбы N. Величины d, К и N для данной кон-
струкции насоса постоянны. Следовательно, производи-
тельность гидронасоса зависит от величины хода порш-
ней, т. е. от угла наклона блока цилиндров у. Для уг-
лов у, не превышающих 15°, можно считать, что
h = Dy,
где D — расстояние между диаметрально противопо-
ложными цилиндрами блока.
Гидродвигатели — устройства, предназначен-
ные для преобразования энергии жидкости во враща-
тельное или поступательное движение их выходного
звена. Обычно гидравлические двигатели могут повора-
чивать свой выходной вал на неограниченный угол. Про-
стейшие гидродвигатели обеспечивают только ограни-
ченное движение своего выходного звена. Такие двига-
тели называют иногда гидравлическими силовыми уст-
ройствами. Среди гидравлических устройств, нашедших
применение в гидроприводах артиллерийских установок,
можно отметить гидроцилиндр и гпдроссктор. В рас-
сматриваемой установке гидроцплиндр применяется в
качестве привода вертикального канала, а’ гидросек-
тор— в качестве привода горизонтального канала
управления положением оружия.
89
Вертикальный привод установки включает гидро-
цилиндр и шестеренчатый редуктор. Гидроцилиндр
(рис. 56) состоит из корпуса 1, штока с поршнем 2,
зубчатой рейки 3, двух штуцеров 4 и двух игольчатых
клапанов 5. Торцы цилиндра закрыты заглушками 6.
Поршень и заглушки имеют уплотнения, которые ис-
Рис. 56. Гидроцилипдр:
I _ корпус; 2 — поршень; 3 — зубчатая реПка; 4 — штуцер; 5 — кла-
пан; 6 — заглушка; 7 — перемычка; 8 — уплотнение; 9 — отверстие
ключают утечку жидкости. Шток цилиндра крепится к
элементам обода установки. Рейка цилиндра соединена
с редуктором, выходной вал которого связан с оружием.
Поршень штока делит внут-
ренний объем цилиндра на две
изолированные полости. В пу-
стотелом штоке имеется пере-
мычка 7, которая разделяет
магистрали высокого и низ-
кого давлений.
При подаче в штуцер 4а
жидкость проходит в правую
Рис. 57. Гидросектор:
/ — корпус; 2 — лопасть: 3 —
штуцер
полость цилиндра через от-
верстие 9а в стенке штока.
В этой полости создается из-
быточное давление. Сила, дей-
ствующая на правую заглушку, заставляет цилиндр
перемещаться вправо. На установке шток укреплен
вертикально, следовательно, поршень и оружие пере-
мещаются в вертикальной плоскости (вниз). При по-
даче жидкости в штуцер 46 оружие будет переме-
щаться в противоположную сторону. На корпусе ци-
линдра закреплены игольчатые клапаны 5, предназна-
ченные для стравливания воздуха при заполнении гид-
росистемы жидкостью.
90
В качестве горизонтального привода оружия в рас-
сматриваемой установке применяется гидросектор
(рис. 57), состоящий из корпуса 1 и лопасти 2. На кор-
пусе гидросектора установлены два штуцера 3 для под-
вода жидкости. Лопасть 2 образует во внутреннем объ-
еме гидросектора две изолированные полости. Для
исключения утечки жидкости лопасть имеет уплотни-
тельные манжеты. Ось вращения лопасти служит осью
вращения установки. Корпус гидросектора крепится
к силовым элементам самолета. При подаче жидкости
в штуцер За сила, действующая на лопасть справа, за-
ставит установку и оружие перемещаться влево. При
подаче жидкости в штуцер 36 оружие начнет переме-
щаться вправо.
§ 12. ОБЩИЕ СВЕДЕНИЯ ПО ЭКСПЛУАТАЦИИ УСТАНОВОК
Артиллерийская установка — сложный комплекс
электромеханических устройств. Точность и безотказ-
ность работы установки в воздухе во многом зависит от
того, как она подготовлена на земле. В процессе экс-
плуатации регулярно контролируется техническое со-
стояние установок и выполняются регламентные работы.
Периодичность и объем работ, выполняемых на установ-
ках, определяются соответствующими инструкциями по
эксплуатации, регламентами технического обслужива-
ния и указаниями Главного инженера ВВС. Выше было
показано, что конструкция установки определяется мно-
гими факторами, в том числе типом самолета, местом
расположения установки на самолете, устанавливаемым
на ней оружием и т. д.
Несмотря на разнообразие конструктивных схем
установок, можно выделить некоторые общие правила,
которыми руководствуются при работе на установках.
Здцсь уместно напомнить о необходимости строгого со-
блюдения установленных правил безопасности, которые
следует выполнять при работе на установках. Прежде
всего следует помнить, что к выполнению любых работ
на установке можно приступать лишь после того, как
будет разряжено оружие. Перед р.нряжанием не-
обходимо установить около самолет»! предупреждающие
сигналы: красный флаг или красный фонарь. Стволы
оружия должны быть направлены в безопасную зону.
91
Во время разряжания или заряжания оружия катего-
рически запрещается находиться кому-либо перед ство-
лами.
Контроль технического состояния установок, как
правило, всегда начинается с внешнего осмотра. Открыв
соответствующие замки и сняв обтекатель (капот, люч-
ки) установки, проверяющий должен убедиться в отсут-
ствии механических повреждений ее силовых узлов.
Особое внимание при этом уделяется состоянию узлов
крепления установки к силовым элементам самолета и
оружия к лафету. Затем проверяют сохранность и со-
стояние агрегатов следящего привода, прицельных
устройств, патронных ящиков, трактов питания, гильзо-
звеньеотводов, системы управления огнем и перезаряжа-
нием оружия. Проверяемые узлы и агрегаты не должны
иметь видимых механических повреждений и нарушения
лакокрасочных покрытий. На внешней кабельной сети
установки не должно быть нарушения экранировки и
изоляции.
При внешнем осмотре подвижных установок прове-
ряют вручную плавность вращения оружия и работу
концевых выключателей, ограничивающих движение
оружия или устанавливающих его в походное положе-
ние. На установках, имеющих гидравлический силовой
привод, проверяют наличие жидкости в гидросистеме и
герметичность всех ее соединений. В системе пневмо-
перезаряжания оружия давление воздуха должно быть
не менее минимально допустимого. Утечка воздуха из
пневмосистемы не допускается. Если оптика прицель-
ных устройств загрязнилась, то ее очищают от грязи и
пыли.
После внешнего осмотра приступают к проверке ра-
ботоспособности установки под током. При этой провер-
ке качественно оценивается работоспособность различ-
ных ее систем. Порядок и приемы проверки установки
под током определяются инструкцией по ее эксплуата-
ции и техническим описанием. Суть проверки подвиж-
ной установки под током сводится к наблюдению за ре-
акцией различных ее систем на команды, подаваемые
от пульта управления установкой. При включении
выключателей питания проверяющий убеждается, что
включились в работу соответствующие преобразова-
тели и другие мощные потребители электрической энер-
92
гии. Как правило, их включение сопровождается крат-
ковременным падением напряжения в бортовой сети ле-
тательного аппарата, что может быть проверено по со-
ответствующим приборам.
Проверка работоспособности установки, как правило,
начинается с проверки исправности системы дистанцион-
ного управления и силового привода. Нажав рычаг
действия на ручках управления, проверяющий должен
убедиться в том, что стволы оружия пришли в положе-
ние, заданное ручками управления. При перемещении
ручек управления оружие должно следовать за ними
без заметного отставания. В согласованном положении
не должны наблюдаться незатухающие колебания ору-
жия. При включении вычислителя должны измениться
величины бортового угла и угла возвышения. После вы-
ключения вычислителя оружие должно вернуться в ис-
ходное положение.
Если в системе управления установкой предусмотре-
на сигнализация разрыва цепей стрельбы при больших
углах рассогласования, то следует проверить работу и
этой цепи. Для этого необходимо резко развернуть
ручки управления в одной из плоскостей. Лампа сигна-
лизации («Блокировка стрельбы») должна погаснуть.
Цепь ее питания будет разорвана контактами реле Pi
(рис. 45 и 31).
Работа профильного ограничителя стрельбы обычно
проверяется совместно с проверкой работы автомата
перезаряжания. Так как в патронниках пушек нет па-
тронов, а в этом проверяющий убедился при проведении
внешнего осмотра, то при нажатии на кнопку «Огонь»
выстрела не последует. Это равноценно отказу типа
«осечка». При нажатой кнопке «Огонь» автомат пере-
заряжания должен включить электропневмоклан ан си-
стемы, который и подаст сжатый воздух в цилиндр
пневмоперезаряжания оружия.
Если подвести оружие к запретной зоне, т. е. напра-
вить его на какую-либо часть своего самолета, то про-
фильный ограничитель должен разорвать цепь стрельбы
пушки (рис. 40). Переведя переключатель рода работы
автомата перезаряжания в положение «Автомат» и на-
жав рычаг действия, проверяющий должен Медленно
приближать оружие к запретной зоне. Если оружие не
дошло до нее, то автомат производит перезарядку
93
оружия. Но как только ось канала ствола войдет в за-
претную зону, «стрельба» прекратится. Это вступил в
работу профильный ограничитель.
В результате проведенной проверки контролирующий
убеждается в том, что все системы установки реагируют
на подаваемые команды. Однако полученные сведения
о работоспособности не могут гарантировать высокую
точность работы установки. С целью определения коли-
чественных характеристик различных систем установки
при проведении контроля состояния следует пользовать-
ся контрольно-проверочной аппаратурой. С помощью
контрольной аппаратуры можно объективно оценить
техническое состояние установки.
Обычно техническое состояние установки определяет-
ся по результатам контроля нескольких ее параметров,
т. е. величин, которые численно характеризуют состоя-
ние той или иной группы элементов (устройства) уста-
новки. Если все проверяемые параметры укладываются
в допустимые пределы, то установка обеспечит высокую
точность наведения оружия. Стрельба по цели будет
эффективной. Окончив контроль состояния установки,
нужно устранить все замеченные неисправности.
Пополнение боекомплекта пушек или укладку новых
патронных лент в ящики установок можно начинать
только после окончания работ, связанных с проверкой
состояния оружия, установки и прицела. При укладке
патронной ленты в ящик следует придерживаться схемы
укладки, изображенной на яшике (рис. 30). Если не
надо заряжать оружие, то первое звено патронной
ленты должно быть закреплено в горловине патронного
ящика. Это исключит выпадение патронной ленты из
ящика при резких эволюциях самолета.
Получив команду на заряжание оружия, нужно убе-
диться в том, что перед самолетом выставлены сигналь-
ные знаки (флажок или фонарь). С помощью предусмо-
тренных приспособлений патронная лента протаскивает-
ся через подводные рукава к приемнику пушки и в него
вводится первый патрон. На земле всегда производится
неполное заряжание, при котором в лапках затвора нет
патрона. Такое заряжание исключает возможность слу-
чайного открытия огня из данной пушки. Для ведения
стрельбы в воздухе летчик (стрелок) обязан сделать
одну перезарядку.
94
После заряжания оружия запрещается выполнять ка-
кие-либо работы на оружии и установке.
Для сохранения технических характеристик устано-
вок в пределах установленных допусков на них выпол-
няются регламентные работы. Как и для всей другой
авиационной техники, периодичность их выполнения
определяется временем налета самолета. Самолет, на
котором должны выполняться регламентные работы, по-
ступает на специальную площадку. После осмотра уста-
новок и составления ведомости дефектов личный состав
группы регламентных работ по вооружению приступает
к выполнению регламентных и ремонтных работ.
С установки снимаются оружие, отдельные агрегаты
и блоки следящего привода, органов питания, управле-
ния огнем и перезаряжанием. Устройства, определяющие
надежность и точность работы установки, обязательно
проверяются с помощью соответствующей контрольно-
проверочной аппаратуры. Объем, порядок выполнения и
применяемые при выполнении этой работы контрольная
аппаратура и инструмент перечислены в технологиче-
ских картах. На каждом рабочем месте должен иметься
набор технологических карт, обеспечивающий выполне-
ние всех предусмотренных работ.
95
ГЛАВА IV
АВИАЦИОННЫЕ СТРЕЛКОВЫЕ ПРИЦЕЛЫ
ДЛЯ СТРЕЛЬБЫ С ПОДВИЖНЫХ
АРТИЛЛЕРИЙСКИХ УСТАНОВОК
§ 13. ЗАДАЧА ПРИЦЕЛИВАНИЯ ПРИ СТРЕЛЬБЕ С САМОЛЕТА
И ЕЕ ОСОБЕННОСТИ
Основной особенностью воздушной стрельбы (стрель-
бы с самолета по воздушной или наземной цели) яв-
ляется ее быстротечность: вся подготовка к стрельбе
после обнаружения цели и сама стрельба могут длиться
всего несколько секунд. Другая особенность заключает-
ся в том, что прицеливание при воздушной стрельбе
очень сложно, так как необходимо учитывать одновре-
менно множество факторов. Поэтому решение задачи
прицеливания и само прицеливание при воздушной
стрельбе должны быть как можно больше автоматизи-
рованы. Это достигаете# с помощью прицельных уст-
ройств.
Задача прицеливания имеет свои особенности на
каждом типе самолета. Прицеливание при стрельбе
с подвижной установки тяжелого самолета (бомбарди-
ровщика, военно-транспортного самолета и т. д.) яв-
ляется наиболее простым, так как оно не связано непо-
средственно с управлением полетом самолета. Здесь
задача прицеливания сводится к определению направле-
ния оси ствола пушки, потребного для попадания в цель,
и к открытию огня в нужный момент.
При прицеливании для стрельбы с самолета по са-
молету необходимо учитывать, что стрельба произво-
дится с движущегося самолета. Под действием давле-
96
ния пороховых газов снаряду сообщается скорость о0.
Она направлена по оси пушки и называется относитель-
ной начальной скоростью. С такой скоростью начинает
двигаться снаряд относительно пушки или относитель-
но самолета.
Пусть самолет, с которого производится стрельба,
движется относительно воздуха со скоростью Vi. Тогда
начальная скорость снаряда относительно воздуха Dot
будет равна геометрической сумме векторов и Vj:
^01 =4 + Ц. (7)
Эта скорость называется абсолютной начальной скоро-
стью снаряда. Начиная двигаться со скоростью уОь сна-
ряд летит по некоторой кривой, которая называется
траекторией снаряда.
При стрельбе по неподвижной относительно воздуха
цели, например по свободному аэростату, оружие надо
направить так, чтобы траектория снаряда проходила
через эту цель. При стрельбе по движущейся цели,
например по самолету, условие прохождения траекто-
рии через ту точку пространства, в которой находится
цель в момент выстрела, не решит задачу поражения
цели. Действительно, пока летит снаряд в эту точку,
цель переместится. Следовательно, огонь следует откры-
вать несколько раньше. В этом случае говорят о стрель-
бе с упреждением.
Чтобы попасть в движущуюся цель, надо знать тра*
ектории снаряда и самолета-цели, причем знать их до
выстрела. На подвижной установке ствол пушки нужно
направить так, чтобы снаряд и цель, двигаясь по своим
траекториям, пришли в точку встречи одновре-
менно.
Заметим, что между траекториями снаряда и само-
лета-цели есть принципиальная разница. Снаряд в по-
лете не управляется, поэтому траектория снаряда изве-
стна заранее. Наука, которая изучает траекторию сна-
ряда, называется внешней баллистикой. Что касается
траектории самолета, то ее можно считал» известной
только на небольшое время вперед. Можно считать, на-
пример, что в течение небольшого промежутка времени
самолет будет лететь в том же направлении и с той же
скоростью, как и в момент выстрела. Если же рассма-
4—320 97
тривать большой промежуток времени, то траектория по-
лета самолета заранее неизвестна, так как летчик мо-
жет, управляя самолетом, за достаточно большой про-
межуток времени существенно изменить скорость и на-
правление полета.
Задачу прицеливания по движущейся цели можно
решить геометрическим построением (рис. 58). На ри-
сунке обозначены: Ц - место нахождения цели в мо-
мент выстрела; ССЦ — система сопровождения цели
Рис. 58. Решение задачи
прицеливания построе-
нием прицельной схемы
(оптический визир и дально-
мер или радиолокационная
станция); D—вектор дально-
сти, определяющий положе-
ние цели в момент выстрела
относительно ССЦ; О — ору-
жие; Б — вектор смещения
ССЦ относительно оружия —
база параллакса; V] —
вектор собственной скорости
самолета; v0 — вектор относи-
тельной начальной скорости
снаряда; o0i — вектор абсолют-
ной начальной скорости сна-
ряда; Цу — точка встречи сна-
ряда с целью — упрежден-
ная точка; L (Т) — вектор
хорды траектории цели — ли-
нейное упреждение;
Dy(T) — вектор хорды траектории снаряда — упре-
жденная дальность; Т — время полета сна-
ряда. Обозначения L (Т) и Dy (Т) показывают, что
время полета цели и снаряда до точки встречи Цу
одно и то же.
Как видно из рисунка, можно найти такое направ-
ление вектора v0 (т. е. направление пушки), которое
необходимо для попадания в цель.
В действительности в прицелах задача прицелива-
ния решается иначе. Схемой прицеливания, показанной
на рис. 58, пользуются лишь для того, чтобы показать
влияние различных факторов при определении задан-
ного направления пушки и для составления уравнений.
98
Время полета снаряда Т на дальность Dy и его по-
нижение т; в воздухе можно представить как время по-
лета Тп и понижение т]п в пустоте, умноженные соответ-
ственно на некоторые поправочные коэффициенты gt
и gy т. е.
Г = (9)
(1о)
Установлено, что коэффициенты gt и g сложным
образом зависят от условий стрельбы и прежде всего
от высоты. При стрельбе па малых и средних высотах
они больше единицы, а с увеличением высоты, т. е. с
уменьшением плотности воздуха, стремятся к единице.
Для характеристики плотности воздуха вводят функцию
высоты Д=//(//). Она равна относительной плотности
воздуха, т. е. Д(0) = 1, и с ростом высоты величина Д
уменьшается, приближаясь к нулю.
Коэффициенты gt и g зависят также от баллисти-
ческих характеристик снаряда, т. е. от того, насколько
форма снаряда, его калибр и вес приспособлены к пре-
одолению сопротивления воздуха. Степень приспособ-
ленности (точнее, неприспособленности) снаряда к пре-
одолению сопротивления воздуха характеризуется так
называемым баллистическим коэффициен-
том:
где i — коэффициент формы;
d — калибр снаряда;
пг — масса снаряда.
Чем хуже приспособлена форма снаряда к преодо-
лению сопротивления воздуха, тем больше коэффициент
формы i и тем больше баллистический ко «ффнцпепт С.
Снаряды могут быть геометрически подобны друг
другу (т. е. иметь один и тот же коэффициент формы i).
Однако с увеличением калибра масса снаряда растет бы-
стрее, чем квадрат калибра (или поперечное сечение).
11оэтому с увеличением последнего баллистический
103
коэффициент уменьшается, снаряд лучше преодолевает
сопротивление воздуха, медленнее теряет скорость.
Чтобы упростить вычисление элементов траектории
снаряда, обычно рассматривают их зависимость от про-
изведения СД. В этом случае изменение плотности воз-
духа, т. е. высоты полета самолета, сказывается на дви-
жении снаряда так, как будто бы изменился его балли-
стический коэффициент. Поэтому произведение СД часто
обозначают Сн и называют приведенным балли-
стическим коэффициентом.
Коэффициенты gt и зависят также от дально-
сти Dy, так как чем больше дальность, тем длительнее
снаряд находится в воздухе (напомним еще раз, что в
пустоте gt=^ = l). На практике влияние дальности
стрельбы Dy и коэффициента Сн на элементы траекто-
рии снаряда можно учитывать одновременно, рассматри-
вая произведение CHDy.
Наконец, коэффициенты gt и зависят (не в очень
сильной степени) от абсолютной начальной скоро-
сти foi. Таким образом, все аргументы, от которых
зависят коэффициенты gt и gv сводят к двум: C^Dy
и г>01, т. е. рассматривают их как функции gt(CHDy, г>01)
и Sr, (Сн-Оу, Ooi)- Значения этих'функций для различных
значений аргументов даются обычно в виде таблиц
(приложение 4).
Относительно зависимости коэффициентов gt и g
от скорости п01 нужно сделать одно замечание. Среди
скоростей есть одно значение скорости, которое имеет
исключительное значение при рассмотрении движения
любого тела в воздухе. Это — скорость звука.
Коэффициенты gt и gr зависят не просто от скоро-
сти t>oi, а от отношения uOi/a, где а — скорость звука. Но
скорость звука в воздухе не постоянна и зависит от
температуры воздуха. Для простоты таблицы коэффи-
циентов gt и gT, составляются для определенной скоро-
сти звука aojv, вычисленной при стандартной темпера-
туре у земли. Поэтому в таблицах скорость звука не
указывается.
Зависимость коэффициента gt и g^ от скорости зву-
ка слабая, и поэтому ее можно не учитывать. Если все
104
же требуется высокая точность решения задачи, то
учесть влияние изменяющейся скорости звука можно,
пользуясь зависимостью скорости звука от температуры.
Для этого вместо скорости t>oi вводят расчетное значе-
ние начальной скорости ^01т. Так как коэффициенты gt и
g зависят от отношения voi/a (числа Маха), то расчет-
ное значение начальной скорости должно удовлетворять
равенству:
v01t _ Vqi
С-., О ’
ON
откуда
71 -- 7/
v0h — VO1 а
или
VOh = ^01
288
273 +Г ’
где Р— температура воздуха на высоте стрельбы в °C.
С этим значением скорости снаряда г»01т затем вхо-
дят в таблицы значений коэффициентов gt и g^.
§ 16. ГИРОСКОП И ЕГО СВОЙСТВА
Гироскопом можно назвать любое тело, имеющее ось
симметрии и приведенное в быстрое вращение вокруг
этой оси. В стрелковых прицелах гироскопы приме-
няются для измерения угловой скорости визирной
линии.
Гироскоп обладает свойством сохранять неизменным
направление оси собственного вращения в пространстве,
если на него не действуют внешние силы. При действии
внешней силы, перпендикулярной к оси собственного
вращения, гироскоп поворачивается не по направлению
силы, как стало бы разворачиваться любое обычное
1ело, а в перпендикулярной плоскости. Такое движение
называется прецессией. Например, под действием
силы Р, тянущей ближний к нам конец оси гироскопа
вниз (рис. 62), он будет поворачиваться (прецессиро-
вать) не в вертикальной, а в горизонтальной плоскости.
Направление прецессионного вращения определяется
105
следующим правилом Н. Е. Жуковского: если повернуть
вектор внешней силы на 90° вокруг собственной оси ги-
роскопа по направлению его вращения, то этот вектор
укажет направление прецессии.
Чем больше сила Р и чем на большем расстоянии
от центра тяжести гироскопа (плече) I она приложена,
т. е. чем больше момент Pl, тем больше угловая ско-
рость прецессии ш:
1 Р1 = К>»,
Поправление где К— коэффициент
прецессии м пРопоРЦиональности>
X z-называемый кинетиче-
' ским моментом гиро-
on Р S'* скопа.
80 / Чем массивнее ги-
/ роскоп (ротор гироско-
< па) и чем больше ско-
Р рость его собственного
Рис. 62. Построение направления пре- вращения, тем боль-
цессии гироскопа ше кинетический мо-
мент гироскопа К и,
следовательно, тем меньше угловая скорость пре-
цессии ш.
Есть еще одно правило определения направления
прецессии. Для этого вводят понятия о векторе угловой
скорости г и векторе момента М силы Р (рис. 62) Мо-
дули этих векторов равны соответственно величинам
угловой скорости и момента силы. Направления их
определяются правилом правого буравчика. Если вра-
щающееся тело рассматривать как правый буравчик, то
направление вектора г совпадает с направлением осе-
вого движения буравчика Аналогично, если смотреть в
направлении вектора М, то сила Р поворачивает тело
по ходу часовой стрелки.
Теперь можно сформулировать второе правило опре-
деления направления прецессии: под действием внеш-
него момента М гироскоп прецессирует таким образом^
что вектор угловой скорости собственного вращения г
при этом стремится кратчайшим путем к совмещению
с вектором М.
106
Если гироскоп, помимо вращения вокруг оси симме-
трии, можно свободно поворачивать еще вокруг двух
осей, перпендикулярных к оси симметрии гироскопа и
одна к другой, то говорят, что гироскоп является сво-
бодным или гироскоп имеет три степени свободы.
Примером свободного гироскопа является быстро вра-
щающийся артиллерийский снаряд, а также гироскоп
прицела типа ЛСП. Особенности баллистики снаряда,
связанные с гироскопическими его свойствами, рассмо-
трим в следующем параграфе. В этом параграфе позна-
комимся еще с работой двухстепенных гироскопических
измерителей угловой скорости.
Для измерения угловой скорости визирной линии в
вертикальной и боковой плоскостях применяются гиро-
скопические измерители (гиродатчики) угловой ско-
рости. Гиродатчики размещаются на оптическом визире.
В случае прицеливания с помощью радиолокационной
станции угловые скорости измеряются гиродатчиками,
установленными на специальной гироплощадке, кото-
рая в режиме прицеливания повторяет движение следя-
щей антенны. Для этого между гироплощадкой и антен-
ной осуществляется сельсинная следящая связь. В об-
зорном режиме, когда антенна работает с очень
большими ускорениями, похожими на удары, следящая
система разрывается и гироплощадка с гироскопами на-
ходится в покое.
В гиродатчике (рис. 63) имеется моторчик постоян-
ного тока с центробежным регулятором оборотов. На
роторе мотора закреплен специальный тяжелый махо-
вик. Ротор мотора вместе с маховиком представляет
собой гироскоп, ось ротора является осью его собствен-
ного вращения. Статор мотора одновременно является
рамкой гироскопа. На статоре расположена соленоид-
ная катушка. Рамка гироскопа (статор мотора) вместе
с соленоидом может свободно поворачиваться во-
круг оси 1-1 в корпусе гироскопа. Таким обратом, ги-
родатчик—- это гироскоп с двумя степенями сво-
боды.
Корпус гироскопа жестко связан с оптическим визи-
ром или гироплощадкой, которая повторяет движения
антенны радиолокатора. Следов» гельнЗ, во всех случаях
можно считать, что корпус гироскопа жестко связан с
ишзиром.
107
Соленоидная катушка находится между мощными
постоянными магнитами, которые жестко связаны с кор-
пусом гироскопа и создают сильное магнитное поле,
взаимодействующее с током, проходящим через соле-
ноидную катушку.
Рис. 63. Схема устройства гиродатчиказ
1-1 — оСЬ р^мки гироскопа
Ток в катушку соленоида поступает со вторичной об-
мотки индукционного датчика через усилитель. По прин-
ципу действия индукционный датчик является диффе-
Рис. 64. Электрическая схема гиродатчика
репциальным трансформатором. Железный сердечник с
тремя полюсами- укреплен на корпусе гироскопа. На
боковые полюса намотаны две первичные обмотки. Эти
обмотки соединены последовательно навстречу друг
108
другу. На центральном полюсе намотана вторичная об-
мотка (рис. 64).
Второй частью индукционного датчика является
якорь, укрепленный на рамке гироскопа (рис. 63 и 64).
Если якорь занимает нейтральное положение, симме-
тричное относительно боковых полюсов, то магнитные
потоки первичных обмоток, питаемых переменным то-
ком частотой 400 гц, индуктируют во вторичной обмотке
электродвижущие силы, одинаковые по величине и про-
тивоположные по знаку. Поэтому суммарное напряже-
ние, снимаемое со вторичной обмотки, равно нулю.
Когда положение якоря отно-
сительно полюсов изменяется,
изменяются величины воздуш-
ных зазоров «якорь — первый по-
люс» и «якорь — третий полюс»,
нарушается симметрия магнито-
проводов (т. е. нарушается ра-
венство сопротивлений магнито-
проводов) первичных обмоток.
Поэтому наведенные во вторич-
ной обмотке электродвижущие
силы не будут одинаковыми. Со
вторичной обмотки снимается
разностное напряжение, причем
амплитуда этого напряжения зависит от величины от-
клонения якоря индукционного датчика от нейтраль-
ного положения, а фаза — от направления отклонения
якоря. Напряжение, снимаемое со вторичной обмотки
индукционного датчика, после усиления и детектирова-
ния подается в катушку соленоида.
Таким образом, величина и направление постоян-
ного тока (в катушке соленоида зависят от величины и
направления отклонения якоря индукционного датчика
от нейтрального положения.
Устройство катушки соленоида таково, что даже при
максимальных отклонениях рамки гироскопа вокруг
оси I-I (около 1°) число витков катушки, находящихся
в зазорах постоянных магнитов, не изменяется. При ука-
занном на рис. 65 направлении тока в соленоиде
силы, действующие па оба участка катушки, направле-
ны вправо. Если направление гока в катушке соленоида
изменится на обратное, то силы, действующие на гиро-
109
скоп, будут направлены влево Таким образом, во всех
случаях силы, действующие на оба участка катушки,
совпадают по направлению. Величина и направление
суммарной силы, действующей на гироскоп, зависят от
величины и направления тока в катушке соленоида и,
следовательно, от величины и направления отклонения
якоря индукционного датчика от нейтрального поло-
жения.
Теперь рассмотрим работу гиродатчиков в целом.
Для измерения угловой скорости визирной линии по со-
ставляющим угловых скоростей вращения визирного
устройства вокруг осей Ув и ZD (рис. 60) на каждом
визире устанавливается по два гиродатчика. Оси их ро-
торов проходят параллельно визирной линии, а изме-
рительные оси, перпендикулярные к осям рамок и соб-
ственного вращения гироскопов,— параллельно осям У в
и ZB.
Рассмотрим работу гиродатчика, измерительная ось
которого параллельна оси ZD. При горизонтальном по-
ложении самолета этот гиродатчик предназначен для
измерения угловой скорости визирной линии в верти-
кальной плоскости (рис. 63). Повернем визирное устрой-
ство (вместе с корпусом гироскопа) в вертикальной пло-
скости. Так как гироскоп сохраняет неизменным на-
правление оси собственного вращения в пространстве,
то реакция (давление), корпуса гироскопа на ось рам-
ки I-I создает момент М, направленный по измеритель-
ной оси. Под действием этого момента гироскоп начнет
прецессировать вокруг оси 1-1. При этом якорь индук-
ционного датчика отклонится от нейтрального положе-
ния и напряжение, снимаемое со вторичной обмотки
индукционного датчика, не будет равно нулю. Следова-
тельно, в катушке соленоида пойдет ток, а взаимодей-
ствие тока с постоянным магнитом приведет к возник-
новению силы, приложенной к гироскопу и действующей
в горизонтальной плоскости. Гироскоп под действием
этой силы будет прецессировать в вертикальной пло-
скости.
В зависимости от направления вращения визирного
устройства в вертикальной плоскости якорь индукцион-
ного датчика отклоняется от нейтрального положения
так, чтобы соответствующие этому отклонению фаза на-
пряжения во вторичной обмотке индукционного дат-
110
чика и направление тока в соленоидной катушке созда-
вали силы, под действием которых гироскоп прецессиро-
вал в вертикальной плоскости вслед за визирным
устройством.
Отклонение якоря индукционного датчика, напряже-
ние во вторичной обмотке, сила тока в соленоидной ка-
тушке и, наконец, сила, действующая на гироскоп, тем
больше, чем больше угловая скорость вращения визир-
ного устройства. Например, в гиродатчике ГР-2 сила
тока в соленоидной катушке в миллиамперах численно
равняется угловой скорости визирного устройства в гра-
дусах в секунду Следовательно, сила тока в соленоид-
ной катушке может служить мерой угловой скорости ви-
зирного устройства. Если в цепь соленоидной катушки
последовательно с ней включить потенциометр (рис. 64),
то приложенное к потенциометру (или снимаемое с
движка потенциометра) напряжение также можно при-
нять в определенном масштабе за значение угловой ско-
рости визирного устройства.
< 17. ОСОБЕННОСТИ БАЛЛИСТИКИ СНАРЯДА ПРИ СТРЕЛЬБЕ
ПОД УГЛОМ К НАПРАВЛЕНИЮ ПОЛЕТА САМОЛЕТА
Таблицы коэффициентов gt и g составляются обыч-
но в предположении, что угол нутации снаряда рав-
няется нулю. При стрельбе с подвижной установки са-
Рис. 66. Стрельба под углом к направлению по-
лета (на правой части рисунка сила R разло-
жена)
молета под некоторым бортовым углом ось снаряда в
момент выстрела совпадает с направлением оси канала
ствола (т. е. с направлением вектора ц0), а траектория
полета снаряда относительно воздуха — с направлением
вектора е0) (рис. 61 и 66). Угол 8о между векторами
ш
и Voi—угол нутации или угол атаки снаряда —в
общем случае не равен нулю. Это приводит к тому, что
суммарная аэродинамическая сила /?, точка приложе-
ния которой находится впереди центра тяжести снаряда,
направлена под некоторым углом к вектору —с01 и ле-
жит в плоскости угла атаки снаряда. Ее действие на
снаряд может быть заменено действием силы лобового
сопротивления /?т, направленной по вектору —vOi. нор-
мальной силы аналогичной подъемной силе крыла
самолета и перпендикулярной к вектору vOi, и опроки-
дывающего момента М. Так как из-за быстрого враще-
ния вокруг оси симметрии снаряд ведет себя как гиро-
скоп, то под действием момента М он не опрокиды-
вается, а прецессирует. Чтобы найти направление пре-
цессии гироскопа, вспомним, что стволы пушек имеют
правые нарезы, т. е. снаряду сообщается правое враща-
тельное движение. Поэтому вектор г угловой скорости
собственного вращения направлен по оси снаряда впе-
ред (рис. 66). На основании второго правила гироскоп
прецессирует так, что вектор г стремится к совмещению
с вектором М. В данном случае, как видно из рис. 66,
снаряд прецессирует в плоскости, перпендикулярной к
плоскости чертежа, причем нос снаряда выходит из пло-
скости чертежа и идет к нам. Вместе со снарядом пово-
рачивается также плоскость угла атаки, а следователь-
но, и вектор М, перпендикулярный к этой плоскости.
Таким образом, опрокидывающий момент вызывает пре-
цессию снаряда, т. е. вращение снаряда с постоянным
углом нутации вокруг вектора 1>оь Для наглядного пред-
ставления о прецессии снаряда читателю рекомендуется
вспомнить, как прецессирует волчок, если в момент за-
пуска его ось не совпадает с вертикалью.
Прецессию снаряда можно было бы не учитывать,
если бы она не вызывала некоторые изменения траек-
тории полета снаряда, известные под термином борто-
вого эффекта.
Во-первых, снаряд в полете имеет некоторый угол
атаки. Следовательно, сила RT не равна силе сопротив-
ления воздуха снаряду, летящему с углом атаки, рав-
ном пулю. Чем больше угол 8о, тем больше сила RT и
П2
воздуха и поэтому
и его понижения.
Рис. 67. Положение вин-
товой липни относитель-
но вектора абсолютной
начальной скорости сна-
ряда
тем быстрее снаряд теряет свою скорость. Поэтому
формулами (9) и (10) для определения времени по-
лета снаряда и его понижения можно пользоваться
только в том случае, если угол Во мал, т. е. при стрельбе
в небольшом конусе вокруг продольной оси самолета.
При стрельбе под большими бортовыми углами нужно
учитывать увеличение сопротивле
увеличение времени полета снар:
В этом заключается одно из
проявлений бортового эффекта.
Во-вторых, нормальная сила
всегда лежит в плоскости
угла атаки снаряда, которая вра-
щается вместе с прецессирующим
снарядом вокруг вектора uoi-
Следовательно, на снаряд дейст-
вует сила, перпендикулярная к
вектору скорости центра массы
снаряда и вращающаяся вокруг
него. В этом случае снаряд дви-
жется уже не по прямой, а по
кривой, которая называется в и н-
тобой -линией.
Скорость центра массы сна-
ряда и угловая скорость его вра-
щения вокруг оси непостоянны в
полете. Поэтому шаг винтовой
линии и ее радиус будут менять-
ся. Кроме того, под действием
силы тяжести ось винтовой ли-
нии будет искривляться. Однако рассматривая неболь-
шой участок траектории, можно считать, что ось винто-
вой линии прямолинейна, а шаг ее — постоянен.
Чтобы определить положение винтовой липни отно-
сительно вектора ц01, возьмем лист плотной бумаги и
на нем проведем прямую по диагонали с левого ниж-
него угла до правого верхнего угла. Теперь лист свер-
нем в трубку так, чтобы начерченная на пей линия ока-
залась сверху. Полученная на трубке (цилиндре) кри-
вая и будет винтовой линией (рпс. 67). Если трубка
свернута правильно, получится правая винтовая линия.
К началу винтовой линии приложим указку (карап-
113
даш), обозначающий вектор о0ь так, чтобы он касался
ее, а винтовую линию (трубку) расположим так, чтобы
ее диаметр проходил через вектор в момент вылета
снаряда. Так, например, если стрельба производилась
с левого борта самолета в горизонтальной плоскости,
то винтовая линия пройдет слева от вектора о0ь
Обычно радиус винтовой линии мал (например, не-
сколько десятков сантиметров). Поэтому можно счи-
тать, что снаряд движется вдоль оси винтовой линии
или образующей цилиндра, на поверхности которого
проходит винтовая линия. Таким образом, как легко
заметить из построения, направление оси винтовой ли-
нии (образующей цилиндра), т. е. направление движе-
ния снаряда, не совпадает с направлением вектора Doi-
В этом заключается второе проявление бортового эф-
фекта.
Действительное направление движения снаряда мож-
но получить, повернув вектор uOi вокруг оси самолета
(или вокруг вектора V)) на некоторый угол по ходу
часовой стрелки. Как показали исследования, это угол
“в = С1 — sin То,
СО1
где С] — постоянный коэффициент.
Из рис. 67 видно, что чем дальше снаряд от точки
выстрела, тем он больше отклоняется от направления
вектора ооь На расстоянии В в результате бортового эф-
фекта это отклонение снаряда
= (11)
так как угол ав невелик (обычно меньше 1°).
§ 18. ГИПОТЕЗА О ДВИЖЕНИИ ЦЕЛИ И ВЫРАЖЕНИЕ
СКОРОСТИ ЦЕЛИ ЧЕРЕЗ ИЗМЕРЯЕМЫЕ ПАРАМЕТРЫ
Как известно, для решения задачи прицеливания
нужно знать траекторию цели. Если скорость цели по-
стоянна по величине и направлению (P4=const), линей-
ное упреждение
L(T) = VnT.
(12)
114
Если цель не летит прямолинейно, определение ли-
нейного упреждения усложняется. Современные техни-
ческие средства не позволяют измерять координаты
цели, ее скорость и ускорение с такой точностью, что-
бы можно было определить закон движения маневри-
рующей цели на основании этих измерений. Поэтому
при проектировании прицельных систем задаются гипо-
тезой о движении цели на основании некоторых сооб-
ражений, связанных с тактикой применения самолета,
для которого предназначен прицел.
При выборе гипотезы о движении цели пользуются
следующими двумя основными положениями:
1. Назначение и условия боевого применения само-
лета-цели в значительной степени предопределяют ха-
рактер ее траектории. Например, бомбардировщики яв-
ляются тяжелыми, маломаневренными с'амолетами.
Кроме того, значительные маневры мешали бы им вы-
полнить основную их задачу — долететь до цели за ко-
роткое время и сбросить бомбы. Поэтому для прицелов
истребителей, основная задача которых — уничтожение
бомбардировщика противника, можно считать, что за
сравнительно небольшое время полета снаряда цель ле-
тит прямолинейно и равномерно. Поэтому в прицелах
типа АСП линейное упреждение определяется по фор-
муле (12).
Рассмотрим еще один пример. Если истребители
противника вооружены прицельной системой, позволяю-
щей вести только сопроводительный огонь, они вынуж-
дены лететь по так называемой кривой атаки (этот во-
прос подробнее рассматривается в следующей главе).
Следовательно, в этом случае для прицелов бомбарди-
ровщиков гипотеза о движении цели должна по воз-
можности близко соответствовать движению цели по
кривой атаки.
2. Вопрос о выборе гипотезы о движении цели тесно
связан с вопросом о дальности стрельбы, о времени по-
лета снаряда до точки встречи.
Предположим, что выстрел был сделан с линейным
упреждением, определяемым формулой (12). Пусть
цель маневрирует с постоянным ускорением а. Следо-
вательно, в тот момент, когда снаряд придет в расчет-
ную упрежденную точку, цель отклонится от нее на рас-
115
стояние 0,5 аТ2. Так как снаряды имеют рассеивание,
а цель не является точечной, то при сравнительно не-
большом времени полета снаряда (т. е. при небольших
дальностях стрельбы) стрельба достаточно эффективна,
если даже при прицеливании не было учтено ускорение
цели. Но если мы хотим увеличить дальность эффектив-
ной стрельбы (увеличится время полета снаряда), не-
обходимо учитывать маневр цели.
Однако даже в случае простейшей гипотезы — цель
движется прямолинейно и равномерно, ее скорость, вхо-
дящая в формулу линейного упреждения (12), непо-
средственно не может быть измерена. Для определения
вектора скорости цели можно использовать результаты
слежения за целью с помощью ССЦ — системы сопро-
вождения цели. Действительно, если дальность до цели
не меняется ни по величине, ни по направлению, это
значит, что цель летит с такой же скоростью и в том же
направлении, что и наш самолет. Следовательно, чтобы
в этом случае узнать величину и направление скорости
цели, достаточно измерить величину и направление ско-
рости своего самолета.
В общем случае скорости цели и самолета не равны,
поэтому вектор дальности до цели не постоянен. Ско-
рость изменения вектора дальности по величине и на-
правлению называют относительной скоростью цели
(скоростью цели относительно самолета).
Вектор скорости цели может быть представлен в ви-
де суммы двух векторов (рис. 68)—вектора скорости
самолета V) (собственной скорости) и вектора относи-
тельной скорости цели Угц:
Vu = V1+Vril. (13)
Чтобы найти вектор относительной скорости цели,
нужно к вектору прибавить вектор со знаком ми-
нус. Это следует также из равенства (13). Спроекти-
руем вектор Ргц на оси XD, и ZD. Для этого из его
конца опустим перпендикуляр на ось XD (рис. 68). По-
лучаем составляющую Угцж, направленную по оси XD,
и составляющую УП(, перпендикулярную к этой оси.
Составляющую V' можно представить в виде суммы
116
двух векторов УГщ/ и Угц« направленных по осям YD
и ZD. Таким образом,
Vra. = Т7цх + Vruy + Vraz-
Эти составляющие вектора Угц легко выразить через
измеряемые параметры.
Модуль вектора ра-
вен скорости Уя сближения с
целью, которая может быть из-
мерена с помощью радиодаль-
номера или специального допп-
леровского измерителя, т. е.
УЛ« = -У^, (14)
где x°D — единичный вектор
(орт), направленный по оси
Знак минус означает, что
при сближении с целью (при
Уя>0) векторы Угцх и x°D на-
правлены в противоположные
стороны.
Составляющие УГЦ1/ и Vmz
относительной скорости цели
могут быть выражены через
угловые скорости вращения
визирного устройства, следящего за целью, вокруг
осей ZD и Yd соответственно. Как известно, линейная
скорость при вращательном движении равна произ-
ведению угловой скорости на радиус. В данном случае,
как видно из рис. 68, радиус равняется дальности до
цели. Следует учесть, что если вектор* Уг1(и направлен
по оси Yd (рис. 68), то вращение вокруг осп Z]t проис-
ходит по правилу правого буравчика, поэтому <> л>0.
Вращение вокруг оси YD будет положительным в том
случае, если вектор У^ направлен в сторону, обратную
направлению оси ZD. Таким образом, получим:
Vny, -- ^У{У
Угцг —
(15)
117
Угловые скорости визирного устройства измеряются
с помощью гиродатчиков, рассмотренных в предыдущем
параграфе.
Подставив значения (14) и (15) составляющих векто-
ра Угц в равенство (13), получим следующую формулу
для определения скорости цели:
Уц = Ц - xD + ^DDyaD - Dz°„ (16)
Из равенства (16) следует, что для определения век-
тора Уц нужно измерить вектор собственной скорости
дальность до цели D, скорость сближения с целью Vs
и угловые скорости визирного устройства u>yD и
Измерители этих параметров, очевидно, должны вхо-
дить в состав прицельной системы.
Итак, вектор скорости неманеврирующей цели мо-
жет быть определен по данным измерения его состав-
ляющих. Если же цель маневрирует, т. е. летит по не-
которой кривой с ускорением, то при существующем в
настоящее время уровне измерительной техники ускоре-
ние цели не может быть определено измерением каких-
нибудь величин. Только в том случае, если истребитель
летит по кривой атаки, речь может идти о приближен-
ном получении поправки на движение цели по кривой,
поскольку кривая атаки достаточно точно определяется
условиями, например направлением атаки и дальностью
до цели.
Пусть на рис. 68 изображение самолета и цели соот-
ветствует моменту выстрела. Рассмотрим два случая:
цель летит прямолинейно и цель летит покривей атаки.
В последнем случае вектор скорости цели Уц, а вместе
с ним и вектор Угц будут поворачиваться (в нашем слу-
чае против хода часовой стрелки). Это значит, что пос-
ле выстрела скорость 1/’ц (вместе с ней и ее проекции),
а также угловые скорости <о и в случае полета
цели по кривой атаки будут меньше, чем при прямоли-
нейном движении цели. Чтобы учесть особенность поле-
та цели по кривой атаки, в формулы прицеливания в
величины при угловых скоростях <огд и вводят по-
правочные коэффициенты, несколько меньшие единицы.
118
Тем самым приближенно будут введены поправки на
движение цели по кривой атаки.
В дальнейшем мы будем считать, что цель летит
прямолинейно.
§ 19. РЕШЕНИЕ ЗАДАЧИ ПРИЦЕЛИВАНИЯ
Зная траектории цели и снаряда, можно построить
схему прицеливания (рис. 69) и получить векторное
уравнение прицеливания. Схема определяет необходи-
мое направление вектора
Ьо|, которое обеспечивает по-
падание снаряда в цель при
заданных условиях стрель-
бы. При стрельбе с подвиж-
ной установки заданное на-
правление вектора t>oi обес-
печивается поворотом ору-
жия.
Векторное уравнение
прицеливания может быть
представлено в следующем
виде (рис. 69):
= D +
где г»° = —1- — единичный
м 01 *’01
вектор (орт);
Б — вектор базы парал-
лакса.
Подставляя в это урав-
нение значение входящих в
него членов из равенств (7),
(12) и (16), получим:
= ЦГ—
*’oi 1
-VsT^D+^DDTrD-
Рис. 69. Схема прицеливания:
Oi — оружие; ССЦ — система со-
провождения цели (визирное и
дальномерное устройства); Б — век-
тор базы параллакса; D—вектор
текущей дальности до цели; Ц —
текущее положение цели (положе-
ние цели в момент выстрела);
Цу — упрежденная точка; Рц — век-
тор скорости цели; Vi — вектор
скорости стреляющего самолета;
—относительная начальная ско-
рость снаряда; । — абсолютная
начальная скорость снаряда; —
орт вектора f — дальность по-
лета снаряда по иапрпвленшо век-
тора Ъ - вектор отклонения
снаряда от направления вектора vni
под дейсшием бортового эффекта;
т/ — вектор понижения снаряда
под действием силы тяжести; Dy —
вектор упрежденной дальности;
Б»— линейное упреждение
119
Откуда
> Е = 5 - VSTTD + ^dDT^d - ^ddt^ +
+ ^(Г-^) + (Д-*-ч).
Такие величины, как Vi^T—tT~) • & и У сравнитель-
но невелики — несколько метров или самое большое
десятков метров. При определении направления стрель-
бы их надо учитывать, а при расчете дальности полета
снаряда ими можно пренебречь. Как видно из рис. 69,
^Йу. В самом деле, эти величины зависят прежде
всего от дальности до цели в момент выстрела, которая
измеряется с помощью дальномеров. Даже наиболее со-
вершенные дальномеры — радиодальномеры измеряют
дальность с ошибками, которые могут достигать 30—40 м.
Поэтому в уравнениях прицеливания принимают, что
l—Dy. Произведя соответствующую замену, получим:
i D, = D - V.TXC + -,dDTz-d +
(17)
Это уравнение не дает еще полного решения задачи
прицеливания. Необходимо указать условия стрельбы
и нужно добавить к этому уравнению баллистические
соотношения (8) — (И), определяющие элементы траек-
тории снаряда.
Таким образом получаем систему уравнений. Решая
ее, можно найти все неизвестные величины, в том_числе
углы ₽' и е', определяющие направление вектора t>o.
Следовательно, углы р' и е' могут быть определены
решением приведенной выше системы уравнений. Да-
лее остается установить оружие в положение, соответ-
ствующее полученным значениям этих углов. Такой
путь прицеливания может быть принят в том случае,
когда задача прицеливания решается с помощью бы-
стродействующего цифрового вычислителя, который мо-
жет вычислить систему уравнений с любой заданной
точностью. Если на борту самолета нет цифрового вы-
120
числителя, а в прицельной системе применяется специ-
альный вычислитель непрерывного типа (аналоговый
вычислитель), то приведенная система уравнений ре-
шается иначе.
Предположим, что ошибка в вычислении неизвест-
ных углов достигает 1%. Углы р' и е могут принимать
различные значения. Например, угол 0' изменяется от О
до 360°. В этом случае ошибка в его определении дой-
дет до 3°,6, т. е. станет недопустимо большой. .
Положение оружия можно задать не только относи-
тельно самолета, но и относительно положения цели,
т. е. относительно линии визирования на цель. УглыДВ
и Де, на которые нужно отвернуть оружие от вектора?)
(от линии визирования) называются угловыми по-
правками воздушной стрельбы.
В связи с тем что углы Д0 и Де изменяются в значи-
тельно меньших пределах, чем углы 0' и в', при одной
и той же относительной точности вычислителя абсолют-
ная точность вычисления углов Д0 и Де выше, чем точ-
ность вычисления углов 0' и е'. Если наибольшие воз-
можные значения угловых поправок равны, например
20°, то при той же точности вычислителя наибольшая
ошибка их определения не превысит 0°,2. Такую ошиб-
ку в направлении оружия можно считать допустимой.
Углы поворота (прицела и оружия) и угловые по-
правки связаны соотношениями:
0' = 0 Д0; е’’= е -J- Де. (18)
§ 20. ФУНКЦИОНАЛЬНАЯ СХЕМА (БЛОК-СХЕМА)
ПРИЦЕЛЬНОЙ СИСТЕМЫ
В систему уравнений (8) — (11), (17) и (18) входят
величины 0, е, Vs, <огд, Ут и Д, которые изме-
ряются специальными измерителями при непрерывном
сопровождении цели.
В случае оптического визирного устройства визирная
линия строится с помощью сетки (проходит через центр
сетки), а сопровождение цели визирной линией осу-
ществляется . поворотом оптической головки визира
стрелком вручную (рис. 70). В случае радиолока-
ционного визира визирной линией является ось рав-
носигнальной зоны антенны. Сопровождение цели
121
122
визирной линией осуществляется автоматически. При-
цельную систему можно переключить на оптический или
радиолокационный визир специальным переключателем.
Углы 8 и е измеряются с помощью сельсинов-датчи-
ков, установленных на визирном устройстве.
Дальность до цели D измеряется оптическим или
радиодальномером. Радиодальномер позволяет также из-
мерить скорость сближения с целью Vs. У оптического
дальномера точность измерения дальности и особенно
скорости сближения с целью невысокая. Поэтому в ре-
жиме «Оптика» в вычислитель вводится среднее значе-
ние скорости сближения с целью.
Угловые скорости и измеряются с помощью
гироскопических датчиков, установленных на оптической
прицельной станции или на гироплощадке, связанной
с радиолокационной антенной сельсинной следящей си-
стемой.
Скорость самолета Vi и относительная плотность
воздуха Д могут быть определены в вычислителе ско-
рости и плотности по данным измерителей приборной
скорости Упр, приборной высоты Нпр и температуры
наружного воздуха t°.
Как известно, барометрический датчик высоты изме-
ряет давление воздуха Рн на высоте полета. Плотность
воздуха зависит, кроме давления, от его температуры.
Относительная плотность воздуха
Л = Л^. <•»>
7 н'
где k—коэффициент пропорциональности;
Тн—абсолютная температура воздуха на высоте Н.
Указатель скорости измеряет, по существу, скорост-
ной напор или динамическое давление, т. е. давление
воздуха на некоторую площадку, движущуюся вместе
с самолетом. Говорят, что такой измеритель определяет
приборную скорость Упр. Так как динамическое давле-
ние зависит не только от скорости самолета, по и от
плотности воздуха, приборная скорость не совпадает
с истинной скоростью самолета V]. Они связаны между
собой следующим равенством:
(20)
123
Вычислительное устройство по введенным в него ве-
личинам р, е, D, К, Vi и Д определяет угло-
вые поправки Др и Дё. Как будет показано ъ § 23, эти
поправки получаются в виде углов поворота движков
отработочных потенциометров. Сервомоторы, переме-
щающие эти движки, одновременно поворачивают на
углы Др и Де роторы дифференциальных сельсинов,
включенных в сельсинную следящую систему дистанци-
онного управления артиллерийской установкой.
§ 21. ОПТИЧЕСКИЙ ВИЗИР И ОПТИЧЕСКИЙ ДАЛЬНОМЕР
Оптические визиры применяются для сопровождения
цели по направлению. Особенно широкое применение
получили коллиматорные визиры (рис, 71),
Рис. 71. Схема оптики коллиматорного визира;
7—объектив; 2 — сетка; 3 — лампочка подсветки сетки; отражатель
Коллиматорный визир состоит из объектива 1 и сет-
ки 2, расположенной в фокальной плоскости объектива
(т. е. на фокусном расстоянии от объектива по ходу лу«
124
г
чей). Для подсвета сетки применяется электрическая
лампочка 3.
Сетка состоит из центральной точки и окружности
(сплошной или Прерывной, обозначенной несколькими
точками). Если сетка расположена в фокальной плоско-
сти объектива, ее изображение видно стрелку (летчи-
ку) в бесконечности. В этом случае стрелок одинаково
хорошо видит цель и сетку прицела без напряжения
глаз. Применение отражателя 4 (плоско-параллельной
полупрозрачной пластинки) для изменения направления
хода лучей позволяет разместить головку прицела с оп-
тической системой ниже уровня глаз стрелка. Этим
обеспечивается хороший обзор и естественная види-
мость цели.
Кроме указанных выше элементов, оптическая си-
стема содержит обычно зеркала, размещенные между
сеткой и объективом, которые предназначаются также
для изменения направления хода лучей.
Для сопровождения цели по направлению служит
центральная точка сетки. Задача стрелка заключается
в том, чтобы разворотом прицельной головкй наложить
центральную точку на цель и непрерывно (плавно) со-
провождать ее.
Различают коллиматорные системы с подвижной и
неподвижной сеткой в зависимости от того, является ли
изображение сетки подвижным или неподвижным отно-
сительно прицельной головки с оптической системой.
Коллиматорная система с подвижной сеткой часто при-
меняется в прицелах истребителей. Коллиматорные си-
стемы с неподвижной сеткой применяются обычно в
прицелах подвижных установок тяжелых самолетов.
Такие системы имеют небольшие габариты.
На рис. 72 показан ход лучей в коллиматорной си-
стеме с неподвижной сеткой. Отражатель и неподвиж-
ные зеркала, находящиеся между объективом и сеткой,
не показаны, так как они не влияют на размеры отдель-
ных элементов оптики. Их назначение — добиться более
удобного и компактного расположения элементов
оптики.
В фокальной плоскости объектива показаны три точ-
ки сетки: центральная точка 1 и две диаметрально про-
тивоположные точки 2 и 3 окружности переменного
радиуса, когда окружность имеет наибольший диаметр.
125
Построение хода лучей ясно из рисунка. Например, по-
казаны три луча, исходящие из точки 2. Один луч —
центральный — проходит через объектив без преломле-
ния. Два других луча, падающие не края объектива,
при прохождении через объектив преломляются, стано-
вясь параллельными центральному лучу. Аналогично
строится ход лучей, расходящихся из точки 3.
Область, заключенная внутри телесного угла ртах,
под которым виден диаметр наибольшей окружности,
называется конусом видимости. Пока глаз стрел-
Рис. 72. Ход лучей в коллиматорном визире:
1, 2 и 3 — центральная и диаметрально противоположные токи сетки
ка находится в пределах этого конуса, сетка прицела
видна полностью даже при наибольших ее размерах.
При выходе глаза из этой области часть сетки пропа-
дает. Высотой конуса видимости h задаются, исходя из
удобств работы стрелка с прицелом.
Так как окружность сетки служит для измерения
дальности при обрамлении ею цели (описывании цели
окружностью), можно сказать, что ₽тах— это наиболь-
ший видимый угловой размер цели, с которым придется
встречаться в условиях воздушного боя. Величинойршах
задаются в зависимости от размеров предполагаемых
самолетов-целей и от дальностей воздушной стрельбы.
Таким образом, размеры элементов оптики (напри-
мер, диаметр объектива) должны быть такими, чтобы
сетка (окружность) наибольшего заданного углового
размера ртах была видна полностью из точки, располо-
женной на заданном расстоянии от объектива, т. е.
126
L
Рис. 73. Схема из-
мерения дально-
сти
р
rf06 = 2Atg-^, или, так как угол ртах сравнительно
небольшой:
rfo6 = ^fflax-
Перейдем к рассмотрению работы оптического даль-
номера. Если диаметр сетки dc, то сетка будет видна
под углом
₽с = -^, (21)
где f—фокусное расстояние объек-
тива.
Когда истребитель атакует бом-
бардировщик или военпо-транспорт-
ный самолет, стрелок этого самолета
видит размах крыльев истребителя L
почти без искажения под углом
(рис. 73)
<22)
Стрелка учат правильно обрамлять
цель кольцом переменного радиуса,
т. е. подобрать кольцо так, чтобы раз-
мах крыльев самолета точно вписался
в окружность. При таком обрамле-
нии диаметр сетки прицела и раз-
мах крыльев самолета видны под одним и тем же уг-
лом, т. е. flc—pL- На основании равенств (21) н (22)
получаем
dc L
f~D>
откуда
О = /А. (23)
Фокусное расстояние объектива f известно. Размах
крыльев самолета должен определить стрелок по типу
самолета и ввести в прицел. Обрамляя цель, он подби-
рает необходимое значение диаметра сетки dc. Зная
эти величины, по формуле (23) можно вычислить даль-
ность до цели D
127
Построение окружности переменного радиуса осу-
ществляется следующим образом. В фокальной плоско-
сти объектива расположены три сетки, которые прец-
суавляют собой тонкие мельхиоровые диски с прорезя-
ми. На двух дисках (дальности и базы) прорези выпол-
нены по логарифмическим спиралям, а на среднем
диске — по радиальным прямым (рис. 74).
Логарифмические прорези сеток дальности и базы
в точках пересечения образуют ромбики — отверстия,
которые составляют дальномерное кольцо. Средняя сет-
ка с радиальными прорезями закрывает лишние ромби-
Рис. 74. Схема построе-
ния сетки прицела
ки, которые могут по-
явиться вследствие двой-
ного пересечения лога-
рифмических прорезей.
В центре всех сеток име-
ются совпадающие между
собой отверстия, которые
образуют центральную
марку.
База L вводится при
повороте базовой сетки.
В зависимости от разма-
ха крыльев самолета диа-
метр окружности увели-
чивается или уменьшается. Далее обрамление цели сет-
кой осуществляется поворотом сетки дальности. При
заданных значениях f и L, как видно из форму-
лы (23), диаметр сетки dc и дальность D взаимо-
связаны. С другой стороны, при неподвижной базовой
сетке (т. е. при заданном L) диаметр сетки dc устанав-
ливается поворотом сетки дальности. Следовательно,
угол поворота сетки дальности при обрамлении цели
может служить мерой дальности. Нужно заметить, что
между углом поворота сетки дальности и самой даль-
ности зависимость не линейная. Поэтому в дальномер-
ном устройстве пользуются функциональным потенцио-
метром. Такой дальномер называется оптическим
внешнебазовым дальномером. В нем в ка-
честве базы берут известные заранее размеры цели.
Внутрибазовые оптические дальномеры, в которых база
заданной длины строится внутри самого прибора, в авиа-
ции применения не нашли.
128
§ 22. ВЫПОЛНЕНИЕ МАТЕМАТИЧЕСКИХ ДЕЙСТВИЙ
Математические действия в прицеле сводятся к вы-
работке синусов и косинусов углов, умножению (или
делению) и сложению (или вычитанию).
1. Для выработки синусов и косинусов углов при-
меняются тригонометрические (синусно-косинусные)
потенциометры.
Каркас тригономе-
трического потенцио-
метра представляет со-
бой плоскую прямо-
угольную пластину, на
которую намотан про-
вод с постоянным ша-
гом. К концам намот-
ки подводится питаю-
щее напряжение. На
плоской стороне пла-
стины по окружности с
центром в середине на-
мотки перемещается
один или несколько
Рис. 75. Тригонометрический потен-
циометр
движков.
Рассмотрим напряжение щ, снимаемое с движка
при повороте его на угол у (рис 75). Очевидно, что ве-
личина тока, текущего по витку намотки:
. _ и
l' = 2kr’
где k — удельное сопротивление намотки единичной вы-
соты;
г—радиус движка, равный половине высоты на-
мотки, а напряжение
щ = itkh,
где h — расстояние от контакта движка до средней (ну-
левой) линии намотки.
Следовательно:
uh и
^=-2--—=^SinT,
так как отношение hlr равно sin у.
Если второй движок поместить под углом 90° к пер-
вому, то напряжение, снимаемое с него, будет пропор-
5-320 129
ционально косинусу угла у. Обычно обе половинки по-
тенциометра питаются напряжениям^ ±п/2. Так нужно
для того, чтобы синусы и косинусы угла могли изменять
свои знаки, если угол меняется от 0 до 360°. Когда
угол у принимает значения, например от 0 до 180°, и
для решения задачи нужен только синус этого угла, до-
Рис. 76. Сложение с помощью серво-
устройства
статочно иметь лишь верхнюю половину потенциометра,
показанного на рис. 75.
Теперь рассмотрим получение в вычислителе триго-
нометрических функций углов р, е и [?', е'.
Углы р и е вводят-
ся в вычислитель от
сельсинных следящих
систем. Статоры сель-
синов-приемников, рас-
положенных в вычис-
лителе, связаны со ста-
торами сельсинов-дат-
чиков грубого канала,
расположенных на оп-
тическом или радио-
локационном визире.
Если угол поворота
сельсина-приемника не
равен углу поворота
сельсина-датчика, в ро-
торе первого сельсина возникает сигнал. Усиленный
в сервоусилителе сигнал служит для управления по-
воротом серводвигателя, который в свою очередь по-
ворачивает ротор сельсина-приемника до тех пор, пока
сигнал на его роторе не исчезнет, т. е. до тех
пор, пока ротор сельсина-приемника не повернется от-
носительно своего статора на тот же угол, что и ротор
сельсина-датчика. Одновременно двигатель на тот же
угол р или е поворачивает каркасы тригонометрических
потенциометров, движки которых остаются неподвиж*
ными. Следовательно, напряжения, снятые с движков
этих потенциометров, будут пропорциональны синусам
или косинусам углов (3 или е.
Значения cos[3' и cose' получаются с помощью так
называемых дифференциальных тригонометриче-
ских потенциометров, у которых могут быть повернуты
как каркасы, так и движки. Предположим, что в триго-
130
R2 подводятся к сервоуси-
Рис. 77. Схема входного эле-
мента сервоусилителя:'
7 — вибратор; 1 — конденсатор: S —.
сопротивление; 4 — усилительная
лампа
неметрическом потенциометре, у которого каркас по-
вернут на угол [3 или е, повернули еще движок соответ--
ственно на величину угловой поправки ДВ или Де. Тогда
угол поворота движка относительно каркаса будет
З + ДЗ или е + Де, а напряжение, снимаемое с него, про-
порционально косинусу (или синусу) углов 3' или б'.
2. Сложение (напряжений) производится с помощью
сервоустройства или с помощью суммирующего уси-
лителя.
Слагаемые напряжения и\ и и2 (рис. 76) через масш-
табные сопротивления R\ и
лителю. Сервоусилитель уп-
равляет серводвигателем,
перемещающим движок от-
работочного потенциометра.
Напряжение ис с отработоч-
ного потенциометра подво-
дится также к сервоусили-
телю через масштабное со-
противление Rc. Покажем,
что напряжение ис равняет-
ся (в некотором масштабе)
сумме напряжений ut и и2.
Рассмотрим схему вход-
ного элемента сервоусилите-
ля (рис. 77), состоящую из
вибратора 1, конденсатора 2,
лительной лампы 4. Вибропреобразователь условно по-
казан в виде двух неподвижных и одного подвижного
контактов. Подвижный контакт колеблется между не-
подвижными с частотой 400 гц. Напряжения ut и и2 мо-
гут быть поданы через масштабные сопротивления как
на оба неподвижных контакта вибратора, так и на
один из них. В последнем случае второй контакт зазем-
ляется.
Если на неподвижные контакты поданы равные на-
пряжения, конденсатор 2 полностью заряжается и ток
через сопротивление 3 при любом положении подвиж-
ного контакта не поступает на сетку усилительной лам-
пы 4. Если напряжения на контактах неодинаковы, на-
пример, на верхнем контакте выше, чем на нижнем, го
при соприкосновении подвижного контакта с верхним
неподвижным через сопротивление 3 потечет ток заряда
5* 131
сопротивления 3 и уси-
конденсатора, а при соприкосновении с нижним —
ток разряда. Следовательно, на сетку усилительной
лампы поступит переменное напряжение, фаза которого
совпадает или не совпадает с опорным напряжением
(которое приводит в колебания подвижный контакт)
в зависимости от того, на каком из неподвижных кон-
тактов потенциал выше. Сервоусилитель приводит в
движение серводвигатель. Последний в зависимости от
фазы усиленного сигнала перемещает движок отрабо-
точного потенциометра всегда таким образом, чтобы
напряжения на неподвижных контактах уравнивались.
Пусть напряжения щ, и2 и ис подаются на один из
неподвижных контактов (другой неподвижный контакт
заземлен). Найдем зависимость напряжения ис от щ
и ц2-
После окончания отработки потенциалы обоих непо-
движных контактов уравняются. Так как один из них
заземлен, условно можно считать, что второй неподвиж-
ный контакт также заземлен (на рис. 76 заземление
точки А условно показано пунктиром). Следовательно,
токи, протекающие через сопротивления R2 и Rc:
= (24)
В действительности точка А не заземлена. Поэтому
сумма токов ij, i2 и ic, поступающих в точку А, должна
равняться нулю:
откуда
= (26)
Таким образом, напряжение ис отработочного потен-
циометра пропорционально алгебраической сумме на-
пряжений щ и и2, умноженных на постоянные величи-
ны, зависящие от масштабных сопротивлений.
При сложении с помощью сервоустройства в даль-
нейшем используется не напряжение wc, снимаемое
с отработочного потенциометра, а само перемещение
движка отработочного потенциометра, пропорциональ-
ное напряжению ис- Движок отработочного потенцио-
132
метра кинематически связывается с движками других
потенциометров, входящих в решающие цепи. Сложение
с помощью сервоустройства применяется тогда, когда
суммарную величину нужно вводить в решающие цепи
в виде перемещения (угла поворота).
Если напряжение ис может быть использовано непо-
средственно, для сложения применяется суммирующий
усилитель. Входной элемент такого усилителя аналоги-
чен входному элемен!у сервоусилителя. Напряжения
Hi, «2 и ис (рис. 78) через масштабные сопротивления Ri,
Рис. 78. Сложение с помощью сум-
мирующего усилителя
Рис 79. Умножение с по-
мощью потенциометров
и Rc подаются на один из неподвижных контактов.
Второй неподвижный контакт заземлен.
Коэффициент усиления усилителя берется очень
большим (в несколько тысяч раз). Это значит, что для
получения напряжения ис на выходе, сигнал на входе
усилителя может быть очень маленьким (сотые доли
вольта). Поэтому при определении токов, проходящих
через сопротивления Rlf R? и Rc, напряжение в точке Л
практически можно считать равным нулю. Следователь'
но, в этом случае напряжение ис на выходе усилителя
на основании формул (24) — (26) также равно алгебраи-
ческой сумме напряжений и\ и иг, взятых в определен-
ном масштабе.
Сложение угловых координат цели ([3 и ») С угловы-
ми поправками (Др и Де) по формулам (18) осущест-
вляется с помощью дифференциальных сельсинов.
3. Умножение производится с помощью потенциомет-
ров. Один из сомножителей вводится в виде напряже-
ния и, питающего потенциометр, а второй — в виде угла
перемещения движка потенциометра (рис. 79). Сопро-
133
тивление нагрузки /?„ берется во много раз (например,
в несколько десятков раз) больше сопротивления по-
тенциометра R. В этом случае можно считать, что весь
ток течет через сопротивление потенциометра Следова-
тельно, напряжение, снимаемое с движка:
или
иг = ир,
где г — часть сопротивления потенциометра, вводимая
движком;
Р = г/Я
Таким образом, напряжение Ui равно произведению
двух величин: и и р. Величина р может изменяться от О
до 1 при изменении г от
О до R. Произведение
.Рис. 80. Характеристики нена-
I ружейного 1 и нагружение
го 2 потенциометров
щ=ир при w = const пред-
ставляет собой прямую 1
(рис. 80).
Часто не удается до-
биться того, чтобы сопро-
тивление нагрузки пре-
вышало сопротивление
потенциометра в несколь-
ко десятков раз, особен-
но в том случае, когда
сомножителей несколько,
т. е. умножение осущест-
вляется в нескольких кас-
кадах. Если R„ больше R
всего в несколько раз, то зависимость щ от р представ-
ляет собой кривую 2. При р=0 и р=1 кривая 2 и
прямая 1 пересекаются. Между этими точками кри-
вая 2 «провисает», и говорят, что потенциометр на-
гружен.
Чтобы добиться при умножении более точных ре-
зультатов поступают следующим образом. Множитель р
изменяют не до 1, а только до рк (например, до 0,9
или 0,8). Тогда часть кривой 2 можно принять прибли-
женно за прямую (как это показано пунктиром на
134
и
Рис. 81. Включение
потенциометра в схе-
му умножения
рис. 801. Однако в этом случае при изменении р от 0
до рк движок перемещается только по части потенцио-
метра. Наибольший угол поворота движка будет не 330э
(301 оставляют для открытых концов потенциометра), а
меньше, поэтому точность ввода сомножителя в виде
угла поворота движка уменьшится. Чтобы этого не
было, часть сопротивления от рк до 1 (рис. 80), по ко-
торой движок потенциометра не двигается, выносят за
потенциометр в виде отдельного сопротивления (сопро-
тивление /?2 на рис. 81).
Часто сомножитель, который
вводится в виде угла поворота движ-
ка потенциометра, изменяется не от
нуля, а от некоторого наименьшего
значения до своего наибольшего
значения. Например, величина
изменяется от 1 до 1,5. Следова-
тельно, если такую величину вво-
дить как сомножитель по схеме, по-
казанной на рис. 79, то движок ни-
когда не будет доходить до левого
конца потенциометра, т. е. все воз-
можные углы поворота движка по-
тенциометра не будут использованы
полностью. Чтобы использовать все
положения движка, часть сопротив-
ления (от 0 до рн на рис. 80), по
которой движок потенциометра не
двигается, также выносят за потен-
циометр в виде отдельного сопротивления (сопротивле-
ние на рис. 81).
Таким образом добиваются, чтобы при изменении
сомножителя р в пределах от р„ до рк движок потенцио-
метра перемещался по всему диапазону 330°.
Для примера рассмотрим умножение па потенцио-
метре в цепи гиродатчика (рис. 64). Как было показано,
напряжение, приложенное к потенциометру, пропорцио-
нально угловой скорости или шгд. Если теперь движок
перемещать пропорционально расчетному времени Тр,
то напряжение, снимаемое с движка потенциометра,
будет пропорционально произведению или
135
Для умножения может применяться также реостат-
но-мостиковая схема (рис. 82). В первое плечо такой
схемы включено постоянное сопротивление Rt, в осталь-
ные плечи — переменные сопротивления х2, х3 и х4
Предположим, что введены величины х2 и х3. Если при
этом нарушилось равновесие моста, то через обмотку
поляризованного реле, включенного в диагональ моста,
потечет ток того или другого направления. В зависимо-
сти от направления тока замкнутся соответствующие
контакты, и на
Рис. 82. Реостат-
но-мостиковая схе-
ма умножения
якорь двигателя поступит напряжение
соответствующего знака Серводвига-
тель начнет перемещать движок по-
тенциометра х4 в ту сторону и до тех
пор, пока ток в диагонали моста не
исчезнет, т. е. пока мост не придет в
равновесие. В этом случае напряже-
ния в точках А и В будут равны ме-
жду собой, т. е.
И ------------ = и -------—------,
щ + Xi х3 -f- х.
откуда
-- Д, Х2Х3,
т. е. величина х4 в некотором масштабе равна произве-
дению величин х2 и х3.
4. Для деления часто применяются те же множитель-
ные схемы. Например, если в мостиковой схеме
(рис. 82) независимо друг от друга вводить величины х2
и х4, а серводвигатель кинематически связать с движ-
ком потенциометра х3, то отработанное значение х3 бу-
дет выражаться через введенные величины х2 и х4 по
следующей формуле:
• X -
3 1 Х2 ’
т. е. величина х3 в некотором масштабе равняется част-
ному от деления х4 на х2
Мостиковые схемы деления применяются, например,
для вычисления плотности воздуха и истинной скоро-
сти самолета по формулам (19) и (20).
136
Иногда применяются также специальные делитель-
ные схемы (рис. 83). Из схемы видно, что
и п
' = К, + х
т. е. величина в некотором масштабе равняется част-
ному от деления и на y=Rt + x.
5. Для вычисления некоторой функции одного аргу-
мента используют функциональный потенциометр
(рис. 84). Его наиболее просто осуществить, если функ-
ция может быть представлена в виде ломаной линии, со-
х
Рис. 83. Делительная
схема
Рис. 84 Функциональный потенцио-
метр и его характеристика
стоящей из отрезков прямой. В этом случае функцио-
нальный потенциометр строится на базе линейного по-
тенциометра путем шунтирования постоянными сопро-
тивлениями некоторых его участков.
§ 23. РЕШАЮЩИЕ ЦЕПИ
Решающие цепи предназначаются для выполнения
комбинированных действий (сложения, вычитания, ум-
ножения и т. д.). Зная работу отдельных элементов вы-
числителя, можно самостоятельно разобраться с реше-
нием полученных выше уравнений с помощью решаю-
щих цепей. Ниже рассмотрена цепь вычисли юля
(рис. 85), на которой решается следующее уравнение:
cos е' Др + V, (т — 1) sin Р — ky V, cos р • Sin е +
+ *6^7“ sin Р «- "’ус7’р- (27)
137
Такая запись соответствует порядку, в котором чле-
ны уравнения подаются на один из двух неподвижных
контактов входного элемента сервоусилителя (рис. 77).
В самой верхней цепочке показано вычисление члена
cos s'• Др путем умножения cose' на Др. Угловая по-
правка Др может быть как положительной, так и отри-
цательной. Чтобы с движка отработочного потенциомет-
ра можно было снимать др любого знака, средняя точка
потенциометра заземлена, а на питание потенциометра
подаются напряжения, пропорциональные ±cose' Эти
напряжения снимаются с двух движков тригонометриче-
ского потенциометра, на который подаются постоянные
напряжения ±100 в. Сопротивления, включенные после-
довательно с тригонометрическим и отработочным по-
138
тенциометрами, служат для исправления характеристик
нагруженных потенциометров (см. сопротивление Rz на
рис. 81). Такие же сопротивления можно увидеть и
в остальных цепочках. Слагаемое cose'-Ар поступает на
вход сервоусилителя (на один из неподвижных контак-
тов вибропреобразователя) через масштабное сопротив-
ление.
Вторая и третья цепочки, соответствующие слагае-
мым Vi (т—1) sin (3 и — k7 Vicosp«sin|3, начинаются
от усилителя скорости V|. Выше было уже указано, что
истинная скорость вычисляется по формуле (20) с по-
мощью реостатно-мостиковой схемы (рис. 82), т. е. ско-
рость Vt получается в виде перемещения движка отра-
боточного потенциометра или в виде напряжения, сни-
маемого с другого потенциометра, движок которого
перемещается сервомотором вместе с движком отрабо-
точного потенциометра. Казалось бы, чго напряжение,
снимаемое с движка потенциометра, далее можно ис-
пользовать как скорость V|. Однако скорость V| входит
во многие уравнения. Следовательно, напряжение, про-
порциональное У|, с движка потенциометра приш-
лось бы подавать в другие цепочки и он оказался бы
сильно нагруженным. Поэтому напряжение Кь снимае-
мое с движка потенциометра, подают на вход усилителя
по мощности, откуда оно поступает на питание боль-
шого количества потенциометров. Такой усилитель на-
зывается развязывающим. С выхода усилителя
напряжение 1Л подается на питание тригонометрическо-
го потенциометра. Когда угол р меняется от 0 до 360°,
величины sin{3 и cosp меняют свой знак. Это возможно
в том случае, если на питание потенциометра подастся
напряжение К( обоих знаков. Далее V, умножается на
sin (3 и на т— 1. Величина т меняется от 1 до 1,5 Следо-
вательно, наименьшее значение -с—1 равно пулю, по-
этому сопротивление Rg = 0 (рис. 81). Таким образом по-
лучается слагаемое 1Л (т— l)sinp.
В слагаемом — cos р sin р величины cosp н sin р
могут изменять свой знак. Поэтому напряжение cos р
снимается с двух движков, чтобы па ишавие потенцио-
метра sinр подавать напряжения обоих знаков.
Далее следует слагаемое Ло/>-у—sin р. Деление на
' i>
величину Гр осуществляется по схеме, показанной на
139
рис. 83. Соответствующее значение Б вводится переклю-
чателем. Здесь предполагается, что величина Б может
иметь одно из трех значений.
На другой неподвижный контакт вибропреобразова-
теля на входе сервоусилителя (рис. 77) подается вели-
чина tuv£,?P. стоящая в правой части уравнения (27).
Умножение o>v£) на Тр было пояснено при рассмотрении
схемы гиродатчика (рис. 64). Заметим только, что ми-
нимальное значение расчетного времени Tv больше
нуля. Поэтому в этой цепочке введено сопротивление /?з
(рис. 81). Нужно указать еще на две детали. На вы-
ходе усилителя гиродатчика показан регулировочный
реостат. Выше было указано, что при вращении пере-
датчика с угловой скоростью 1 град I сек через соленоид
течет ток в 1 ма. В действительности гиродатчики отли-
чаются друг от друга (разные напряженности магнит-
ных полей, разные зазоры между полюсами магнитов
и т. д.). Поэтому при вращении гиродатчика со скоро-
стью 1 град/сек ток в соленоиде всегда несколько боль-
ше 1 ма. Регулируя сопротивление • реостата, можно
добиться, чтобы через потенциометр Tv проходил ток,
равный точно I ма.
Наконец, произведение подается па вход сер-
воусилителя через фильтр, состоящий из сопротивле-
ния R и емкости С (назначение этого фильтра будет по-
яснено в следующем параграфе). Серводвигатель пере-
мещает движок потенциометра Др до тех пор, пока не
наступит равенство напряжений на обоих неподвижных
контактах на входе усилителя. Это означает, что по-
правка Др удовлетворяет уравнению (27), так как пра-
вая его часть равняется левой.
Одновременно с движком отработочного потенцио-
метра сервомотор поворачивает на угол Др ротор диф-
ференциального сельсина.
§ 24. ТОЧНОСТЬ СТРЕЛЬБЫ И ПОРЯДОК ПРИЦЕЛИВАНИЯ
Стрелок сопровождает цель с помощью визирного
устройства, допуская ошибки, которые называются
ошибками сопровождения или ошибками
и а и од к и. Сами по себе эти ошибки невелики, и с ни-
ми можно было бы не считаться. Однако при слежении
ГЮ
за целью с ошибками угловая скорость визирного уст-
ройства (визирнои линии) может значительно отличать
ся от угловой скорости линии цели или линии, соеди
няющей самолет с
целью (рис. 86). Как
видно из рис. 86, б и
86, в, истинные и из-
меренные значения уг-
ловой скорости линии
цели, а следовательно,
истинные и вычислен-
ные значения поправ-
ки на относительное
движение цели могут
отличаться весьма силь-
но. Чтобы избежать
больших ошибок в оп-
ределении угла упре-
ждения вследствие оши-
бок в измерении угло-
вой скорости линии
цели, величины “V£,^p
и пропускают
через фильтр нижних
частот, состоящий из
сопротивления R и ем-
кости С (рис. 85 и 87).
Произведение сопро-
тивления R на ем-
кость С обозначается
через 7ф и называется
постоянной вре-
мени фильтра.
Если R взять в мега-
Рис. 86. Функции изменения:
а — истинных и измеренных ннгн'нпй угло-
вой координаты цели; б углоной ско-
рости линии цели; в — угловых поправок
омах, а С в микрофа-
радах, то 7ф получает-
ся в секундах. При
прохождении через такой фильтр быстрые и 1мепепия
сигнала сглаживаются. Например, входная величина
ЮудТ'р и выходная величина (<'>у//’р)11Л вначале резко
отличается одна от другой и от ее истинного значения
<оудистЛ>- Однако через некоторое время сглаженное
141
значение поправки приближается к истинному ее зна-
чению.
Величина (и>ул7'р)сгл на выходе фильтра получается
тем более сглаженной, чем больше постоянная времени
фильтра Тф. Но ее нельзя неограниченно увеличивать.
Чем больше постоянная времени фильтра Тф, тем боль-
ше время переходного процесса Тп, в течение которого
величина (шУо^р)сгл становится примерно равной истин-
ному значению. Время Тп примерно в четыре раза боль-
ше постоянного времени фильтра 7ф(7’п=47’ф). Напри-
мер, если Тф==0,3 сек, то для окончания переходного
процесса в отработке поправки нужно время 7'п=1,2 сек.
Рис. 87. Схема простейшего фильтра
•
Это значит, что поправки воздушной стрельбы будут от-
рабатываться правильно только через 1—2 сек после на-
чала слежения за целью и ввода исходных величин в вы-
числитель прицельного устройства.
Надо учесть еще одно обстоятельство. Через вре-
мя Тп, как видно из рис. 86, в, (0,У£Лр)сгл приближает-
ся по величине к шУ£)ист^'р, н0 не равняется ей точно.
С увеличением Тф разность |( шупГр ) сгл - I
сначала уменьшается. При определенном значении Тф
она становится наименьшей, а затем при дальнейшем
увеличении Тф величина (<°УО7'р)Сгл на выходе филь-
тра начинает снова все более отличаться от истинной.
С этой точки зрения также невыгодно чрезмерное уве-
личение Тф.
В заключение можно сформулировать следующий по-
ря ток прицеливания с помощью прицелов рассматривае-
мого типа (в режиме «Оптика»),
142
Стрелок должен обнаружить самолет-цель, опознать
тип самолета и установить в оптическом дальномере
размах цели (базу). Поворотом визирного устройства
наложить сетку на цель и непрерывно обрамлять ее по-
воротом рукоятки дальномера. Одновременно стрелок
должен плавно сопровождать цель (удерживать в цен-
тральной точке сетки). Через 1—2 сек слежения за
целью по углам и по дальности можно открывать огонь,
если при этом дальность до цели соответствует дально-
сти эффективного огня.
ГЛАВА V
СТРЕЛКОВЫЕ ПРИЦЕЛЫ САМОЛЕТОВ-
ИСТРЕБИТЕЛЕЙ
§ 25. РЕШЕНИЕ ЗАДАЧИ ПРИЦЕЛИВАНИЯ ПРИ СТРЕЛЬБЕ
С ИСТРЕБИТЕЛЕЙ
Самолеты-истребители могут быть вооружены пуш-
ками, неуправляемыми и управляемыми ракетами:
Многоцелевые истребители — фронтовые истребители
и истребители-штурмовики,— предназначенные для бое-
вых действий по наземным и воздушным целям, могут
иметь все три вида оружия. Истребители-перехватчики,
действующие лишь по воздушным целям, вооружаются,
как правило, управляемыми ракетами.
Стрелковые прицелы, устанавливаемые на истреби-
телях, должны обеспечивать выполнение прицеливания
при применении оружия, имеющегося на самолете. Зна-
чит, прицелы многоцелевых истребителей должны быть
универсальными, обеспечивающими прицельную стрель-
бу по наземным и воздушным целям при применении
соответствующих видов оружия.
Пушечные, ракетные установки (орудия) истребите-
лей являются, как правило, неподвижными. Можно счи-
тать, что вектор v0 относительной начальной скорости
снаряда или ракеты при стрельбе с истребителей совпа-
дает по направлению с осью самолета. Поэтому прице-
ливание при стрельбе с истребителя выполняется со-
ответствующим управлением самолета, которое в этом
случае должно осуществляться так, чтобы выпустить
снаряды (ракеты) в таком направлении, которое необ-
ходимо для попадания их в цель,
144
Направление стрельбы совпадает с направлением
вектора абсолютной начальной скорости снаряда гоь
Если известны векторы и0 и при прицеливании в
каждый момент можно определить фактическое направ-
ление вектора о01 по формуле (7) (§ 13). Значит, для
выполнения прицеливания нужно непрерывно сравни-
вать фактическое и необходимое направления стрельбы
и управлять полетом самолета так, чтобы эти направ-
ления совпадали.
При стрельбе длинными очередями из пушек или
продолжительными сериями ракет прицеливаться нужно
так, чтобы фактическое и необходимое направления со-
впадали в течение промежутка времени, в который ве-
дется стрельба. Такая стрельба называется сопрово-
дительной. При стрельбе короткими очередями или
залпами ракет можно выполнять прицеливание так,
чтобы фактическое и необходимое направления совпа-
дали лишь в момент, соответствующий началу стрельбы.
Такая стрельба называется заградительной.
При сопроводительной стрельбе решение задачи при-
целивания выполняется для каждого выпускаемого с
самолета снаряда. В этом случае управлять самолетом
нужно так, чтобы он летел по некоторой криволинейной
траектории, называемой кривой атаки. В ряде
случаев для некоторых направлений атаки цели это ока-
зывается крайне затруднительным.
При заградительной стрельбе задача прицеливания
точно решается лишь для момента начала стрельбы,
т. е. не для всех выпускаемых снарядов. Но се можно
вести во время прямолинейного полета истребителя, при
атаках цели с любого направления.
Рассмотрим подробно решение задачи прицеливания
по воздушным целям при стрельбе из пушек. Как уже
говорилось, для решения задачи прицеливания нужно
определить необходимое направление стрельбы, т. е.
такое направление, при котором снаряд должен попасть
в цель. Для этого должно быть учтено движение цели,
снаряда и истребителя.
Проще всего рассматривать движение цели, снаряда
и истребителя относительно воздухп. При этом, так как
дальности воздушной стрельбы невелики, можно счи-
тать, что цель и истребитель находятся в одном слое
145
воздуха, который относительно земли перемешается в
течение всего времени полета снаряда до цели равно-
мерно и прямолинейно со скоростью ветра.
Чтобы найти необходимое направление стрельбы,
нужно построить схему прицеливания. Рассмотрим, как
строится такая схема.
Рис. 88. Схема прицеливания при стрельбе по воздушной цели
Пусть в момент выстрела истребитель находится в
точке О, а цель — в точке Ц на дальности D (рис. 88).
За момент выстрела будем считать момент времени, в
который снаряд покидает истребитель. Цель имеет в этот
момент скорость, величина и направление которой
116
относительно воздуха определяются вектором Кц. Ли-
ния, соединяющая точки О и Ц, называется линией
цели.
Направление полета цели относительно линии цели
определяют обычно курсовым углом q, который
отсчитывается против движения часовой стрелки от на-
правления вектора (рис. 88). Направление на цель
и расстояние ее от истребителя может быть определено
вектором дальности D.
Для учета движения цели нужно знать, как будет
она двигаться после выстрела. Стрельба с истребителя
из пушек ведется обычно на небольшие дальности, по-
этому время полета снарядов до цели невелико (не бо-
лее 1,5—2 сек). Можно считать, что за это время дви-
жение цели существенно не изменится, т. е. принять ги-
потезу: Vu=const, и вычислять линейное упреждение L
по формуле (12).
Таким образом, для учета движения цели нужно по-
строить упредительный треугольник ОЦЦУ, одна сторо-
на которого ОЦ равна дальности стрельбы D, другая
ЦЦУ — лилейному упреждению L, а третья ОЦУ— упре-
жденной дальности Dy. Угол ОЦЦУ в упредительном
треугольнике является курсовым углом цели ?, а угол
ЦОЦу — углом упреждения или угловой по-
правкой на движение цели.
При построении упредительного треугольника учиты-
вается движение снаряда, так как линейное упреждение
зависит также от времени полета снаряда Т па упреж-
денную дальность стрельбы. Кривизна траектории сна-
ряда, появляющаяся вследствие действия па снаряд
силы тяжести, учитывается понижением его т] на 'даль-
ности Dy относительно линии бросания (линия С)Л на
рис. 88). Для этого в точке Цу нужно провести верти-
каль и по ней отложить вверх понижение снаряда ^.ко-
торое он будет иметь на дальности Dy. Вектор пониже-
ния всегда направлен вниз по вертикали.
Необходимое направление стрельбы будет совпадать
с прямой ОА, проведенной из точки О в точку А, нахо-
дящуюся выше упрежденной точки по вертикали на
расстоянии, равном понижению снаряда па упрежден-
ной дальности. Вектор vOi, чтобы снаряд попал в цель,
нужно направить по прямой DA.
147
Треугольник ОАЦУ называют баллистическим
треугольником, так как он включает в себя пониже-
ние траектории. Угол АОЦУ между необходимым направ-
лением_вектора Voi и направлением упрежденной даль-
ности Dy называется углом прицеливания а.
Движение истребителя учитывается при определении
величины и направления вектора г/01. Если бы вектор Vi
совпадал с направлением оси истребителя, тогда и век-
тор Hoi был бы направлен по оси истребителя и его ве-
личина определялась бы как сумма скоростей v0 и Vi
(§ 15). Однако чаще всего вектор V] отклонен от оси
самолета на угол атаки.
Условимся, что истребитель имеет скольжение, если
угол рск между векторами с0 и Vi не равен нулю. При
стрельбе с истребителя угол тск обычно мал (не превы-
шает 10°), поэтому величину скорости считают прибли-
женно равной сумме Цо+Ц- Направление вектора- t»01
определяют углом фск относительно оси истребителя
(относительно вектора г»0), который называется угло-
вой поправкой на скольжение истреби-
теля.
Таким образом, из построенной схемы прицеливания
видно, что в- момент выстрела между осью истребителя
(вектором v0) и линией цели должен быть угол фсум- Его
называют суммарной угловой поправкой,
так как оп получен с учетом трех элементарных угловых
поправок ф, а и фск-
Имея в виду, что при стрельбе с истребителя угло-
вые поправки обычно невелики (не более 10—15°), каж-
дую из элементарных поправок можно определять неза-
висимо от других, т. е. при определении какой-либо
одной поправки считать другие равными нулю.
Формулу для вычисления угла упреждения можно
получить из' упредительного треугольника (рис. 89). По
теореме синусов
sin ф = sin q. (28)
Отношение упрежденной дальности Dy к времени по-
лета снаряда Т равно его средней скорости сС(). При
148
малых углах упреждения значение sin ф мало отличается
от величины угла ф в радианах (например, при ф = 8°
sin ф=0,1392, а ф=0,1396 рад).
Поэтому можно считать, что угол упреждения
<p=-^sin<7- (29)
vcp
Величину sin <7 называют раккурсом цели. Рак-
курс определяет видимое сокращение какого-либо ха-
рактерного размера цели при наблюдении цели под уг-
лом к направлению ее полета. Так, например, если ата-
ковать цель сверху спереди под углом <7 = 30°, видимая
длина фюзеляжа будет вдвое меньше (sin 30с' = 0,5).
Если атаковать цель сбоку под углом <7 = 90°, го длина
фюзеляжа будет видна без сокращения (sin90°= 1)
Угол упреждения, как это видно из формулы (29),
тем больше, чем больше скорость цели и раккурс. С уве-
личением упрежденной дальности угол ф также увеличи-
вается, так как средняя скорость полета снаряда умень-
шается.
Средняя скорость полета снаряда на упрежденную
дальность может быть определена с помощью баллисти-
ческой функции gi(CHDy, Hoi), приведенной в § 15, по
формуле
<30’
149
Из упредительного треугольника (рис. 89) по тео-
реме косинусов упрежденная дальность
о,- 2^-yDcos? . (31)
Из формулы (31) видно, что при атаках цели с зад-
ней полусферы Dy>D, так как cos <7<0; при атаках с пе-
редней полусферы £>у<£>, так как cos<7>0. Причем
дальность Dy будет наибольшей при атаках на попутных
Рис. 90. Баллистический треугольник
Курсах, когда <7=180°, и наименьшей при атаках на
встречные курсах, когда <7 = 0°.
Формулу для вычисления угла прицеливания можно
получить из баллистического треугольника. Как видно
из рис. 90, по теореме синусов
sin a sin (90° — 0)
Ч Оу ’
где 8 — угол тангажа истребителя при стрельбе (угол
между осью истребителя и горизонтальной плоско-
стью).
Откуда, полагая, что углы прицеливания малы, по-
лучим:
а = у?- cos К (32)
150
Понижение снаряда на упрежденной дальности мо-
жет быть вычислено по формуле (10).
Из формул (32) и (10) следует, что угол прицелива-
ния возрастает с увеличением Dy. Это происходит не
только из-за увеличения дальности, но и из-за увеличе-
ния значения функции g. При постоянной дальности Dy
угол прицеливания будет
наибольшим, когда 8 = 0,
т е. в случае атак с гори-
зонтального полета.
Формулу для вычисле-
ния угловой поправки на
скольжение истребителя
можно получить из треуголь-
ника скоростей (рис. 91). В
этом треугольнике угол при
вершине а равен 180°—уск.
По теореме синусов
s‘n фск sin (180°—Тск)
И Vol
Откуда, полагая, что углы
скольжения малы, получим-ь
(33)
Рис. 91. Треугольник скоростей
Формулы (29), (32), (33) являются расчетными для
вычисления угловых поправок ф, а и фск-
§ 26. ОСОБЕННОСТЬ СТРЕЛЬБЫ ИЗ ПУШЕК ПО НАЗЕМНЫМ
ЦЕЛЯМ
Стрельба по наземным целям из пушек, установлен-
ных на истребителе неподвижно по направлению оси ис-
требителя, выполняется, как правило, с пикирования.
При стрельбе по движущейся наземной цели в
штиль прицеливание может выполняться так же, как и
при стрельбе по движущейся воздушной цели При от-
сутствии ветра скорость наземной цели относительно
земли и ее скорость относительно воздуха одинаковы.
В этом случае необходимые поправки можно вычислять
по формулам, приведенным в § 25, по в них вместо VB
нужно подставлять значение М'ц.
151
Стрельба при штиле — редкий случай. Рассмотрим,
как следует учитывать ветер.
Для определения поправок по формулам, приведен-
ным в § 25, нужно знать скорость цели относительно
воздуха. Пусть нам известны скорость и направление
ветра, то есть известен вектор скорости ветра U. При
решении задачи прицеливания предполагается, что в
Рис. 92. Схема прицеливания при стрельбе по наземной цели
слое воздуха между землей и истребителем ветер везде
одинаков, за время полета снаряда до земли не изме-
няется и направлен параллельно поверхности земли.
При ветре воздух перемещается относительно земли со
скоростью U. Очевидно, вектор скорости наземной цели
относительно воздуха
152
При решении задачи прицеливания предполагается,
что за время полета снаряда до цели скорость ее отно-
сительно земли не изменяется ни по величине, ни по
направлению. Так как ранее была принята гипо-
теза о постоянстве ветра, то за время полета сна-
ряда до земли и вектор Рн. ц будет оставаться по-
стоянным.
Для построения схемы прицеливания при стрельбе
по наземной цели предположим, что наземная цель пе-
ремещается в горизонтальной плоскости Р (рис. 92) со
скоростью Й7Ц, имеется ветер, вектор скорости которого
равен U.t Направление захода (ИЗ) будем считать со-
впадающим с проекцией вектора дальности на пло-
скость Р. Угол е называют углом места цели.
Сравнивая схемы прицеливания при стрельбе по на-
земной (рис. 92) и воздушной цели (рис. 88), можно
сказать, что они одинаковы, только в первой схеме для
построения поправки ф учитывается скорость VH. u и
курсовой угол <7н. ц.
§ 27. ОСОБЕННОСТЬ РЕШЕНИЯ ЗАДАЧИ ПРИЦЕЛИВАНИЯ
ПРИ СТРЕЛЬБЕ НЕУПРАВЛЯЕМЫМИ РАКЕТАМИ
Траектория ракеты после пуска в отличие от траекто-
рии снаряда состоит из двух участков: активного и
пассивного. На активном участке работает двига-
тель ракеты и скорость ее возрастает. В конце актив-
ного участка скорость ракеты максимальна. На пассив-
ном участке двигатель ракеты не работает и опа летит
как снаряд.
Особенность решения задачи прицеливания при
стрельбе ракетами состоит в учете указанного отличия
движения ракет от движения снарядов. Очевидно, отли-
чие движения ракет от движения снарядов должно быть
учтено при определении средней скорости v(.p ракеты и
понижения г;. Рассмотрим, как можно определи и, эти
элементы траектории ракеты для некоторой дальности
стрельбы D (рис. 93).
В момент пуска ракета имеет скорость o0i относи-
тельно воздуха. Относительная начальная скорость v0
у ракет значительно меньше, чем у снарядов.
153
Так как траектория ракеты при дальностях воздуш-
ной стрельбы имеет малую кривизну или, как говорят,
траектория настильна, дальность пассивного участка
ОП^О-ОК, (34)
где DK — дальность активного участка траектории ра-
кеты.
На пассивном участке ракета будет лететь как сна-
ряд, пущенный с начальной скоростью г'к, которую имела
Рис. 93. Траектория полета ракеты
ракета в конце активного участка. Тогда время полета
ракеты tn на пассивном участке можно определить по
формуле (9). Общее время полета ракеты
+ (35)
где tK — время полета ракеты на активном участке.
Из рис. 93 видно, что понижение ракеты
VJ = *!к + vjs + г,п,
(36)
где v)K — понижение ракеты на активном участке;
т],!—понижение ракеты па пассивном участке;
154
>j2—понижение ракеты вследствие поворота век-
тора ее скорости на активном участке под
действием силы тяжести.
Понижение на пассивном уйастке может быть опре-
делено по формуле (10).
Таким образом, для определения времени t и пони-
жения т) ракеты необходимо знать элементы конца ак-
тивного участка: ок, tK, rJK, DK и понижение т]2.
Время tK определяется обычно экспериментальным
путем и приводится в технических описаниях ракет.
Движение ракеты на активном участке под дейст-
вием силы тяги двигателя, силы сопротивления воздуха
и силы тяжести определяется во внешней баллистике,
где даются формулы для вычисления элементов конца
активного участка и понижения т]2. Средняя ско-
рость Оср полета ракеты может быть определена как от-
ношение Dylt. Имея эти данные, необходимые поправки
можно найти по формулам, приведенным в § 25.
Как указывалось, начальная скорость v0 у ракет
много меньше, чем у снарядов, поэтому скорость z?oi
у ракет близка к Vt. Значит, при стрельбе ракетами по-
правка на скольжение самолета будет значительно боль-
ше, чем при стрельбе из пушек. Практически она равна
углу скольжения самолета.
При стрельбе ракетами по наземным целям поправка
на ветер и скорость цели учитывается так же, как и при
стрельбе из пушек (см. § 26).
§ 28. ОСОБЕННОСТИ РЕШЕНИЯ ЗАДАЧИ ПРИЦЕЛИВАНИЯ
ПРИ СТРЕЛЬБЕ УПРАВЛЯЕМЫМИ РАКЕТАМИ
При стрельбе из пушек снаряд после выстрела летит
по баллистической траектории, которая определяется
действующими на него силами тяжести и сопротивления
воздуха и при заданных условиях пуска является вполне
определённой. Неуправляемая ракета после короткого
активного участка (менее 1 сек) так же, как и снаряд,
летит по баллистической траектории. Полому при
стрельбе из пушек и неуправляемыми ракетами прихо-
дится решать задачу прицеливания, сущность которой
состоит в том, чтобы снаряд или ракета, перемещаю-
щиеся после пуска по определенной баллистической
155
траектории, встретились с целью в расчетной упрежден-
ной точке
В этом случае для попадания снаряда (ракеты) в
цель, особенно в цель малых размеров, требуется высо-
кая точность решения задачи прицеливания, т. е. нужно
достаточно точно вычислять суммарную угловую по-
правку и, зная ее, выдерживать также достаточно точно
определенное направление полета самолета при прице-
ливании.
Точность решения задачи прицеливания будет зави-
сеть от точности измерения входных параметров (даль-
ности, высоты, скорости истребителя, скорости цели)^
точности вычисления поправок, а также от точности
управления самолетом при прицеливании. Чем больше
дальность стрельбы, тем, очевидно, точнее нужно опреде-
лять поправки и управлять самолетом, так как при тех
же угловых ошибках в определении и выдерживании
суммарной угловой поправки линейный промах будет
больше на большей дальности. Далее, при больших
дальностях стрельбы время полета снаряда (ракеты)
будет большим, и случайный или, тем более, преднаме-
ренный маневр цели может исключить попадание снаря-
дов (ракет) в цель. Учет маневра цели, начавшегося
после пуска, принципиально невыполним при стрельбе
неуправляемыми снарядами и ракетами.
Иначе обстоит дело при стрельбе управляемыми ра-
кетами. Эти ракеты имеют органы управления (рули) и
систему управления. После пуска система управления
воздействует на органы управления так, чтобы ракета
попала в цель, даже если цель начнет маневрировать
после пуска. Однако это не значит, что при стрельбе
управляемыми ракетами не нужно вообще выполнять
прицеливание.
Если иметь в виду самонаводящиеся ракеты,
то у них система наведения работает на основе какого-
либо одного метода наведения ракеты на цель. Метод
наведения определяет закон изменения пеленга цели
(угла <р между вектором скорости ракеты и направле-
нием на цель) при наведении. Маневренные возможно-
сти ракеты (минимально возможный радиус разворота
ракеты) ограничены. С увеличением высоты эти воз-
можности уменьшаются. Поэтому, если направление пу-
156
ска (вектор cOi) будет составлять с направлением на
цель (рис. 94) угол, значительно отличающийся от пе-
ленга <рн. необходимого для наведения, потребуется мно-
го времени после пуска для того, чтобы ракета вошла в
режим нормального наведения по принятому методу.
За время полета до цели ракета может даже не успеть
войти в режим наведения и пролетит мимо цели
Далее, если ракету выпустить на очень малой даль-
ности, то даже при небольших ошибках пуска она так-
же не успеет войти в ре-
жим нормального наведе-
ния. Если же выпустить ра-
кету на очень большой
дальности, она может не до-
гнать цель, так как двига-
тель ракеты работает огра-
ниченное время и сообщает
ей некоторую конечную ско-
рость. Кроме того, система
управления ракетой рассчи-
тывается на определенное
время работы, которое огра-
ничивается возможностями
источников энергии, уста-
навливаемых на ракете. При Рис- 94. Схема пуска управ-
очень больших дальностях ляемой ракеты
стрельбы время работы си-
стемы управления может оказаться меньшим времени
полета ракеты до цели.
Имеются также ограничения по дальности и углу
поля зрения координатора головки наведения ракеты,
который захватывает цель и следит за ней.
При прицеливании ракетами, управляемыми по
радиолучу, нужно также иметь в виду ограничения
по минймальной и максимальной дальностям пуска.
Кроме того, пуск этих ракет необходимо выполнять в
таком направлении, чтобы после пуска ракета попала в
луч и не вышла из него до начала надежного наведе-
ния по лучу.
Таким образом, нельзя производить пуск управляе-
мой ракеты с произвольной дальности и в произвольном
направлении. Нужно выполнять прицеливание. При
стрельбе управляемыми ракетами оно должно быть
157
таким, чтобы обеспёчить пуск ракеты на некоторой раз-
решенной дальности и в таком направлении, при кото-
ром ракета входит в режим нормального наведения че-
рез возможно меньшее время после пуска.
Для выполнения прицеливания при стрельбе самона-
водящейся ракетой по некоторой воздушной цели дол-
жна быть известна зона разрешенных пусков этой ра-
кеты для данной цели.
Размеры зоны по разрешенным дальностям и на-
правлениям пусков определяются скоростью ракеты,
сообщаемой ей двигателем, величинами располагаемых
ракетой перегрузок для маневра, возможностями коор-
динатора головки самонаведения ракеты. На величину
зоны оказывают влияние также скорость цели, скорость
и высота полета истребителя.
Зона разрешенных пусков при атаках цели сзади и
сбоку представляет собой часть сектора, проведенного
из точки местоположения цели, как из центра (рис. 95).
Больший радиус равен максимальной разрешенной
дальности пуска Оюах, меньший — минимальный разре-
шенной дальности пуска £>min. Направления по радиу-
158
сам из точки Ц являются возможными направлениями
пуска.
При выполнении прицеливания нужно так управлять
истребителем, чтобы он вошел в зону по одному из воз-
можных направлений пуска. На рис. 95 показаны две
траектории движения истребителя и точки пуска Oi
и О2.
Рис. 96. Схема прицеливания при пуске
ракеты, управляемой по радиолокацион-
ному лучу
В случае стрельбы ракетой, наводимой по радиолока-
ционному лучу, нужно, как уже говорилось, выполнять
прицеливание так, чтобы пустить ракету в некотором диа-
пазоне разрешенных дальностей и в таком направлении,
чтобы после пуска ракета попала в луч и не вышла из
него до начала режима нормального наведения.
При построении схемы 'прицеливания для определе-
ния необходимого направления пуска можно предполо-
жить, что за небольшой промежуток времени Л полета
159
ракеты до попадания в луч цель летит прямолинейно
(рис. 96) с постоянной скоростью. Допустимо также пре-
небречь поправкой на скольжение истребителя.
Рассмотрим схему прицеливания. Пусть истребитель
в конце участка сближения перед пуском летит по пря-
мой О'О и после пуска совершает некоторый маневр от-
ворота от цели, чтобы не попасть в зону эффективного
оборонительного огня атакуемой цели. Через время Л
после пуска цель переместится в точку Ц\ (ШЛ = УЦЛ),
а истребитель окажется в точке Оь Длина хорды
дуги 001 может быть определена, если известен маневр
истребителя при отвороте от цели после пуска. Луч,
удерживаемый по направлению на цель радиолокацион-
ной станцией наведения истребителя, займет положение
01Дь Направление пуска (направление вектора ц01)
должно быть таким, чтобы ракета с учетом понижения?]
за время попала в луч (траектория неуправляемого
участка полета ракеты за время Л показана пункти-
ром).
Чтобы ракета не вышла из луча, ее поперечная ско-
рость t'p.п в момент попадания в луч относительно лу-
ча 0]Д1 должна быть равна поперечной скорости самого
луча в точке Р.
Из схемы видно, что для выполнения прицеливания
должны быть учтены угловая поправка ф на движение
цели и угловая поправка а на понижение траектории ра-
кеты за время t\.
Более подробно об управляемых ракетах и методах
их наведения говорится в Учебнике механика ВВС по
ракетному вооружению.
§ 29. ВОЗМОЖНЫЕ ПРИНЦИПИАЛЬНЫЕ СХЕМЫ
устройства стрелковых прицелов истребителей
Рассматривая решение задачи прицеливания, мы ви-
дели, что для выполнения прицеливания необходимо
прежде всего определить вектор дальности D, т. е. на-
правление на цель и расстояние до нее относительно
самолета.
Устройства, которые служат для определения векто-
ра D, называются визирами, или визирными
системами. Визир является главным элементом каж-
дого прицела.
160
Визиры могут быть механическими, оптическими, ин-
фракрасными, телевизионными, радиолокационными.
Механические и оптические визиры позволяют выпол-
нять прицеливание только в условиях визуальной види-
мости цели. Инфракрасные визиры, использующие ин-
фракрасное излучение цели, дают возможность выпол-
нять прицеливание в сумерках и ночью при отсутствии
облаков между истребителем и целью. Их называют
пассивными, так как они принимают инфракрасное
излучение цели. Телевизионные визиры позволяют вы-
полнять прицеливание днем. Если телевизионный визир
имеет передающую трубку, чувствительную к тепловому
излучению, то его можно применять и ночью, есте-
ственно, при отсутствии облаков.
Наконец, радиолокационные визиры обеспечивают
прицеливание в любых метеорологических условиях
днем и ночью. Эти визиры часто называются актив-
ным и, так как они излучают электромагнитную энер-
гию и принимают часть этой энергии, отраженной от
цели. Радиолокационные визиры могут быть автомати-
ческими. Такие визиры непрерывно и автоматически
фиксируют углы, определяющие направление вектора D
относительно самолета, и измеряют дальность до цели/).
Оптические, телевизионные и инфракрасные визиры
часто применяются совместно с радиодальномерами, ко-
торые автоматически измеряют дальность. Однако су-
ществуют и оптические неавтоматические дальномеры,
которые могут быть включены в оптический и телевизи-
онный визиры.
Для повышения надежности и помехоустойчивости
прицела в его состав включают два или три визира. Так,
механические визиры дублируют оптические. Оптиче-
ские визиры применяются в качестве дублеров радиоле-,
кационных.
В зависимости от типа визира или визиров прицелы
называют оптическими, радиолокационными, оптико-ра-
диолокационными, оптико-инфракрасными.
Простейшие прицелы (визиры)
Визиры могут самостоятельно применяться для при-
целивания. Прицелы, которые состоят только из визира,
называются простейшими (или просто визи-
рами).
6-320
161
Механич'еский визир (рис. 97) имеет мушку/
и кольцо 2 с перекрестием. С помощью такого устрой-
ства можно определять на глаз углы отклонения линии
цели от направления оси самолета.
Визир устанавливается на самолете так, чтобы на-
правление луча от глаза летчика через мушку и центр
кольца совпадало с направлением оси самолета.
И
Рис. 97. Определение направления на цель с помощью меха-
нического визира:
7 — мушка; 2 — кольцо
Летчику известна угловая величина £1( радиуса коль-
ца. Она равна отношению радиуса кольца гк к расстоя-
нию глаза от центра кольца I, т. е.
Если луч глаз — цель касается кольца, то угол ви-
зирования на цель равен {Зк. В остальных случаях лет-
чик определяет направление на цель, пользуясь извест-
ной ему величиной радиуса кольца как мерой. Напри-
мер, цель, находящаяся в точке Ц\ (рис. 97), видна
приблизительно под углом 2|3К.
С помощью визира можно также определять даль-
ность D. Если размах Б самолета-цели целиком вписы-
вается в кольцо (рис. 98), то
<37>
162
Например, при ₽к = 6° (₽к = 0,105 рад) и Б = 42 м
49
D = 2ДШ = 200 М-
Если размах занимает половину диаметра кольца
(рис. 99), то £> = 400 м.
Механический визир имеет тот недостаток, что угло-
вая величина кольца зависит от расстояния глаза лет-
чика до кольца.
Оптический визир имеет обычно коллиматор-
ную оптическую систему (устройство таких оптических
Рис. 98. Определение
дальности цели с помо-
щью кольца механиче-
ского визира
Рис. 99. Определение
дальности цели с по-
мощью кольца механиче-
ского визира
систем рассматривалось в гл. IV). Кроме сетки и объек-
тива, для удобства прицеливания и компактности ви-
зира в оптическую систему включается зеркало и отра-
жатель, которые лишь изменяют ход лучей от сетки
(рис. 100). Сетка освещается естественным светом днем
и электролампочкой ночью.
Отражателем служит полупрозрачное зеркало. Лет-
чик наблюдает через него пространство впереди по по-
лету и одновременно видит в поле зрения изображение
сетки, создаваемое объективом оптической системы.
Сетка коллиматорного прицела истребителя (ПКИ)
(рис. 101) имеет два концентрических кольца и перекре-
стие. На линиях перекрестия нанесены деления. Угло-
вая величина кольца у,( или деления, видимого летчи-
ком, равна углу, под которым виден диаметр кольца
или деление сетки из центра объектива. Так как у кол-
лиматорной системы изображение каждой точки кольца
6* 163
образуется параллельным пучком лучей, то угловая ве-
личина кольца не будет изменяться от изменения поло-
жения глаза летчика относительно визира.
Кольца сетки и деления имеют следующие угловые
величины:
— большое кольцо — 6° или 0,105 рад;
— малое кольцо — 4° или 0,070 рад;
— большое деление—1°09' или 0,020 рад;
— малое деление — 0°35' или 0,010 рад.
С помощью сетки можно определять дальность и
учитывать поправки так же, как с помощью кольца ме-
ханического визира.
Если требуется выполнить стрельбу по наземной
цели, необходимые поправки вычисляются летчиком за-'
ранее (еще на земле) для выбранных условий стрельбы:
дальности, угла пикирования, скорости истребителя.
Пусть, например для стрельбы по неподвижной цели при
ветре, который дует поперек захода справа, получены та-
кие значения поправок: ф=0,035 рад, а=0,040 рад, афа=
= 0,020 рад. Эти поправки летчик может учесть с по-
мощью сетки (рис. 101), Однако при стрельбе он
164
должен выдержать выбранные для расчета поправок
условия: скорость, угол пикирования и на расчетной
дальности начать стрельбу.
При атаках воздушных целей выдерживать расчет-
ные значения параметров условий стрельбы трудно, так
как они изменяются быстрее, чем при атаках наземных
целей. Поэтому при стрельбе по -воздушным целям при-
меняются различные упрощенные способы определения
поправок, которые позволяют быстро вычислять их в за-
висимости от условий стрельбы.
Основной поправкой при стрельбе по воздушным це-
лям является поправка на движение цели — угол упре-
ждения ф. Для его определения применяется следую-
щий упрощенный способ.
Из формулы (29) видно, что угол упреждения зави-
сит от скорости цели, раккурса и средней скорости по-
лета снаряда (ракеты).
Как показывает опыт, летчики могут определять
раккурс с ошибкой не более ’Л, т. е. определять рак-
курсы 0/4, 1/4, 2/4, 3/4, 4/4. Скорость цели летчик может
приближенно определять по типу атакуемого самолета.
У самолетов-бомбардировщиков скорость обычно боль-
ше, чем у транспортных самолетов; у истребителей она
165
больше, чем у бомбардировщиков и транспортных само-
летов.
Для вычисления угла ф по известной скорости и рак-
курсу может быть применена следующая простая фор-
мула:
фт — X числитель раккурса, (38)
где Уц — скорость цели в км/час.
Например, при Уц=600 км/час и раккурсе 2/4
фт _ 60.2 = 120 тыс.
Формула (38) дает удовлетворительные результаты
при дальностях стрельбы в предела^ 300—500 м.
Механические и оптические визиры дают возмож-
ность грубо на глаз решать задачу прицеливания. Точ-
ность решения, естественно, оказывается низкой, по-
этому дальности эффективной стрельбы по воздушным
целям при использовании этих визиров не превышают
400 м. При атаках наземных целей, когда приходится
стрелять на больших дальностях, получаются значи-
тельные ошибки, которые приводят к большому разбро-
су (рассеиванию) точек попаданий снарядов относи-
тельно цели.
Радиолокационные и инфракрасные
визиры могут применяться как простейшие прицелы
для прицеливания при стрельбе самонаводящимися ра-
кетами, когда дальность и направление на цель могут
определяться приближенно. В этом случае, как мы ви-
дели, достаточно выпустить ракету в зоне разрешенных
пусков. На экранах указанных визиров также имеются
соответствующие сетки, с помощью которых можно
определять углы отклонения линии цели от направления
оси самолета. В составе этих визиров имеются обычно
радиодальномеры, которые автоматически измеряют
дальность.
Полуавтоматические стрелковые
прицелы
Более совершенными по сравнению с визирами яв-
ляются полуавтоматические прицелы. Они обеспечивают
более высокую точность решения задачи прицеливания
166
вследствие автоматизации ряда операций. В составе та-
ких прицелов, кроме визира, имеются- вычислительные
устройства, измерители параметров условий стрельбы
и устройства отработки, вырабатывающие сигналы лет-
чику, по которым он управляет самолетом при прицели-
ваний.
Измерители (датчики) автоматически определяют
параметры условий стрельбы: дальность, высоту, ско-
рость истребителя, углы атаки, скольжения — и преоб-
разуют их в электрические напряжения, токи, механи-
ческие перемещения.
Вычислительные устройства по измеренным входным
параметрам автоматически определяют угловые поправ-
ки, с учетом которых вырабатываются сигналы летчику
для управления самолетом.
Возможны две схемы устройства полуавтоматических
прицелов: с отработкой поправок и с отработкой оши-
бок совмещения.
Схема с отработкой поправок характерна
для оптических полуавтоматических прицелов. Эти при-
целы имеют коллиматорный визир. В оптическую си-
стему входят (рис. 102): сетка /, подсвечиваемая элек-
тролампочкой 2. Сетка размещается в фокальной пло-
скости объектива 3. Лучи от сетки (на рис. 102 показан
лишь центральный луч) проникают через полупрозрач-
ную пластину 4 и попадают на зеркало 5. Отразившись
от зеркала и от пластины, лучи проходят через объек-
тив 3 и попадают на отражатель 6. Через отражатель —
полупрозрачное зеркало — летчик видит изображение
сетки 1 в направлении луча
Зеркало 5 и пластина 4 подвижные. Зеркало может
поворачиваться около двух взаимно перпендикулярных
осей, проходящих через точку О: относительно продоль-
ной оси, лежащей в плоскости рисунка, и поперечной
оси. При повороте зеркала, например на угол ф., около
поперечной оси, падающие лучи, отразившись, отклоня-
ются на угол 2ф3. После преломления в обьекгнве лучи
попадут на отражатель, и летчик увидит и юбражеиие
сетки в направлении луча Л2, отклоненного о г централь-
ного луча на некоторый угол ф. При повороте пластины
около поперечной оси, проходящей через точку Of, так-
же произойдет отклонение изображения сетки в поле
зрения летчика.
167
Таким образом, поворачивая подвижные элементы
оптической системы — зеркало и пластину,—- можно от-
клонять изображение сетки в поле зрения летчика. Опти-
ческая система у прицелов, работающих по первой схе-
ме, представляет собой устройство для отработки угло-
вых поправок.
Рис. 102. Оптическая система визира полуавтоматического
прицела:
1 — сетка; 2 — электролампочка; 3 — объектив; 4 —•
полупрозрачная плоскопараллельная пластина:
5 — зеркало гироскопа; 6 — отражатель
Вычислительные устройства, непрерывно вырабаты-
вая поправки в зависимости от изменяющихся условий
стрельбы, управляют поворотами зеркала и пластины
так, чтобы изображение сетки отклонялось на угол, рав-
ный суммарной угловой поправке фсум.
Визир (или прицельная головка) устанавливается в
кабине в положение, при котором центральный луч Л\
параллелен осям стволов пушек или ракетных орудий.
Летчик, управляя самолетом при прицеливании, должен
168
совмещать центральную точку сетки с целью. Так как
сетка будет отклонена на угол фсум от осей стволов пу-
шек (ракетных орудий), летчик может вести стрельбу
в диапазоне разрешенных дальностей (рис. 103).
Схема с отработкой поправок применяется в оптиче-
ских авиационных стрелковых прицелах (АСП), по-
Рис. 103. Построение поправки прицельной головкой полуавтомати-
ческого прицела
этому ее называют часто схемой типа АСП. Оптические
АСП, как полуавтоматические стрелковые прицелы, мо-
гут быть сопряжены с радиолокационными и инфра-
красными визирами. В этом случае они обеспечивают
выполнение прицеливания при стрельбе по воздушным
головка
Рис. 104. Принципиальная схема сопряжения ЛСП с радио-
локационным визиром:
1 — оптическая коллиматорная трубка; 2 — отражатель
целям, когда нет визуальной видимости. Примером со-
пряжения АСП с радиолокационным визиром является
радиолокационный прицел РП-1.
Сопряжение АСП с радиолокационной станцией осу-
ществляется с помощью специального оптического бло-
ка. В блоке (рис. 104) имеются оптическая коллиматор-
169
пая трубка 1 и полупрозрачный отражатель 2. Блок
устанавливается за прицельной головкой АСП по на-
правлению полета. Коллиматорная трубка дает изобра-
жение метки цели («птички»). Летчик видит это изобра-
жение в отражателе, как в зеркале. Одновременно он
видит в поле зрения и сетку АСП.
Коллиматорная трубка блока подвижная и соеди-
нена следящей системой с антенной радиолокационной
станции. Когда радиолокационная станция захватит
цель, антенна следит за целью и трубка повторяет ее ’
Рис. 105. Сопряжение АСП с инфракрасным ви-
зиром
движения. Вместе с трубкой перемещается в поле зре-
ния и «птичка».
Летчик при прицеливании должен управлять самоле-
том так, чтобы следить центральной точкой сетки АСП
за «птичкой», как за целью (цель, за которой следит ан-
тенна, показана на рис. 104 пунктиром, летчик ее ’не
видит).
Блок сопряжения устанавливается на самолете так,
чтобы его центральный луч совпадал с центральным лу-
чом прицельной головки АСП. Тогда при слежении
сеткой за «птичкой» угол между направлением на центр
птички и центральным лучом будет все время равен
суммарной угловой поправке фсум.
АСП может быть сопряжен также с самолетным ин- •
фракрлспым визиром (СИВ). При этом оптическая
170
температура.
Рис. 106. Прицеливание с по-
мощью инфракрасного визира,
сопряженного с АСП
трубка визира устанавливается вблизи (сбоку) прицель-
ной головки АСП (рис. 105).
Для сопряжения применяется оптическое устройство,
с помощью которого изображение сетки АСП пере-
дается в поле зрения трубки визира. Летчик в поле зре-
ния трубки видит изображения цели и сетки АСП
(рис. 106). Цель видна в виде двух ярких точек, являю-
щихся изображениями сопел двигателей, так как на сре-
зах сопел наиболее высокая
Летчик при прицелива-
нии должен управлять само-
летом и непрерывно совме-
щать центр сетки АСП с изо-
бра?кением цели (рис. 106).
В этом случае угол между
осью трубки и направлением
на центр сетки будет равен
суммарной угловой поправ-
ке фсум- Трубка устанавли-
вается на самолете так, что-
бы ее ось была параллельна
центральному лучу прицель-
ной головки АСП.
Таким образом, АСП
могут применяться само-
стоятельно для прицелива-
ния при визуальной видимости и в сопряжении с радио-
локационными и инфракрасными визирами для прице-
ливания, когда нет визуальной видимости цели. При со-
пряжении с радиолокационным визиром прицел будет
оптико-радиолокационным, при сопряжении с инфракрас-
ным визиром — оптико-инфракрасным. Так как инфра-
красный визир имеет малые габариты й вес, ого можно
устанавливать и в случае сопряжения АСП с радиолока-
ционным визиром. Тогда прицел будет иметь три визира.
Все прицелы, построенные по типу АСП, позволяют
вести только сопроводительную стрельбу, так как во
время прицеливания и стрельбы необходимо непрерывно
следить за целью, чтобы прицел вырабатывал суммар-
ную поправку.
Схема с отработкой ошибки совмеще-
ния применяется в радиолокационных прицелах, у ко-
торых антенна радиолокационной станции автоматнче-
171
ски сопровождает цель. Поэтому имеется возможность
непрерывно фиксировать угол <р между направлением
на цель и осью самолета (или направлением векто-
ра У01).
Вычислительные устройства радиолокационного при-
цела определяют ошибку совмещения
Фсум- <39)
На экране прицела, представляющего собой элек-
тронную трубку, формируется прицельная метка, откло-
Рис. 107. Принципиальная схема прицела с отра-
боткой ошибки совмещения
нение которой от кольца в середине экрана соответст-
вует ошибке совмещения (рис. 107).
Летчик при прицеливании должен так управлять
самолетом, чтобы ошибка совмещения N стала равной
нулю, т. е. чтобы прицельная метка попала в кольцо.
При N=0 угол <р равен суммарной поправке (см. фор-
мулу 39), т. е. между направлением на цель и осью
трубки будет угол, равный суммарной поправке.
Трубка устанавливается на самолете в положение,
при котором ее ось параллельна осям пушек и ракетных
орудий. Так как антенна радиолокационной станции сле-
дит за целью еще до того, как выполнено прицеливание,
вырабатывается непрерывно и ошибка совмещения. Сле-
довательно, летчик может, поместив прицельную метку
в кольцо, открывать стрельбу.
Таким образом, прицел, устроенный по второй схеме,
позволяет выполнять заградительную стрельбу. Кроме
того, такой прицел может обеспечить ведение стрельбы
172
при больших значениях суммарной поправки. При этом
размеры экрана могут быть небольшими, так как отра-
батывается не сама поправка, а ошибка совмещения,
равная разности <р — фсум-
§ 30. ОСНОВЫ УСТРОЙСТВА АСП
Рабочие формулы
Расчетные формулы для поправок при стрельбе по
воздушным и наземным целям из пушек и неуправляе-
мыми ракетами, полученные в § 25—27, являются слож-
ными, содержат в себе некоторые параметры, которые
трудно измерять, а также табличные баллистические
функции gt и g^.
Вычислительные устройства, построенные для вычис-
ления поправок по расчетным формулам, оказались бы
громоздкими. Поэтому в прицелах, в том числе и
в АСП, применяются рабочие формулы, которые полу-
чаются из расчетных после некоторых упрощений.
Кроме того, в этих формулах поправки определяются
через такие параметры, которые поддаются измерению,
а табличные баллистические функции заменяются более
простыми, чтобы можно было вычислять их с помощью
несложных счетно-решающих устройств.
Рарчетная формула (29) для угла упре-
ждения содержит параметры Кц, sin q и t'cp, которые
трудно измерять или вычислять.
В АСП в качестве рабочей формулы для вычисле-
ния угла применяется другая, в которой вместо Vu и
sing используется угловая скорость линии цели юц, т. е.
угловая скорость поворота линии ОЦ (рис. 89) в про-
странстве относительно воздуха. Чтобы определить эту
скорость, нужно найти поперечные составляющие Сц. п
и У1П скоростей и (рис. 108)'.
Угловая скорость отрезка ОЦ
а угол упреждения
Ф = ->.7р, (40)
173
где Гр — расчетное время, определяемое по формуле
D
Tp~vcp-V1
(41)
При слежении за целью центром сетки АСП визир-
ная линия, т. е. линия, соединяющая глаз летчика и
центр сетки (рис. 103), совпадает с линией цели. Зна-
чит, угловая скорость визирной линии wB будет равна
угловой скорости линии"цели ыц.
Рис. 108. Схема для определения угловой
скорости линии цели
Следовательно, вместо формулы (40) можно запи-
сать, что
Ф = %Гр. (42)
В формулу (41) ДЛЯ Тр входит скорость оср, которую, '
как известно, трудно вычислять. Поэтому время Тр опре-
деляют по приближенной формуле:
Tp = Ar + ?(D)f(H). (43)
Постоянный коэффициент Ат и функции <р (D) и
f (И) подбирают для каждого снаряда и каждой ра-
кеты так, чтобы приближенная формула (43) давала
значения Тр, достаточно близкие к тем, которые полу-
чаются при вычислениях по точной формуле (41). Это
174
обычно удается сделать для не очень широких диапазо-
нов изменения условий ведения стрельбы: дальностей,
высот, раккурсов и скоростей цели, скорости истреби-
теля.
Вычислив угол упреждения по формулам (42) и
(43), его можно построить, отклонив сетку на угол ф
в соответствующем направлении. Так, если истребитель
атакует цель сверху, то сетку нужно отклонить на
угол ф вниз в плоскости симметрии истребителя
(рис. 109, а), при атаке снизу — на угол ф вверх
Рис. 109. Построение угла упреждения в АСП:
а — при атаке сверху; б — при атаке снизу; в и г — при атаке сбоку
(рис. 109,6). При атаке цели сбоку слева истребитель
будет иметь правый крен (рис. 109,в), и для построения
угла упреждения нужно отклонить сетку влево, т. е.
в сторону, обратную крену. При атаке цели сбоку спра-
ва (рис. 109, а) истребитель будет иметь левый крен,
и сетку нужно отклонить вправо.
Расчетная формула "(32) для угла при-
целивания а содержит понижение т], вычисляемое
с помощью табличной функции g^. Кроме того, угол а
нужно строить всегда в вертикальной плоскости, прохо-
дящей через линию упрежденной дальности или ось
самолета (рис. 90), что трудно сделать.
Рассмотрим, как обходят указанные трудности при
выборе рабочих формул для вычисления и построения
угла а.
175
При атаке’ цели в горизонтальном полете 0 = 0. Из
формулы (32) следует, что в этом случае
„ ч
а° — D ’
Угол од изменяется в зависимости от D и И так же,
как и расчетное время Гр (с увеличением D увеличи-
вается и Гр, и од; с увеличением Н уменьшается и Тр,
и од). Поэтому од можно представить как функцию Тр:
% = аТр + Ь, (44)
где а и b — постоянные коэффициенты.
Рис. 110. Построение угла прицеливания в АСП. Истребитель имеет
крен и угол тангажа
Если при атаке цели истребитель имеет угол тан-
гажа и крен, для построения угла прицеливания а в вер-
тикальной плоскости отклоняют сетку в плоскости сим-
метрии истребителя на угол ас и в плоскости крыльев на
угол ак. Углы ас и ак подбирают так, чтобы в итоге по-
лучить отклонение сетки на угол а в вертикальной пло-
скости:
ас — «оcos & cos TJ (45)
«к = ад cos & sin у. (46)
Чтобы построить угол прицеливания для положения
истребителя, приведенного на рис. ПО, нужно отклонить
сетку прицела на угол ас вниз в плоскости симметрии
самолета и па угол ак в плоскости крыльев в сторону
176
крена. В результате этих двух перемещений сетка бу-
дет отклонена на угол а в вертикальной плоскости.
Из формул (45) и (46) видно, что для вычисления
углов ас и ак нужно измерять углы у и 8. Если на само-
лете нет измерителей углов крена у и тангажа 9, по-
правки ас, ак учитываются приближенно.
Угол ас можно определять, например, по такой при-
ближенной формуле:
ас = «„Д, (47)
где Е — постоянный коэффициент, который равен неко-
торому среднему значению произведения
cos 9 cos у.
При изменении углов 9 и у от 0 до 45° коэффици-
ент Е может изменяться от 0,5 до 1 (значение 0,5 по-
лучается при 9=45° и т=45°). Однако такое сочетание
углов 9 и у будет редким. Например, при атаках назем-
ных целей с пикирования угол крена у, как правило,
равен нулю (cos0=1), а угол 9 может изменяться от 15
до 45°. Следовательно, Е будет изменяться лишь от
0,97 до 0,71. При атаках воздушных целей обычно мал
угол тангажа 8. Значит, и в этом случае предел изме-
нения Е будет небольшим. Таким образом, можно вы-
брать некоторое среднее значение Е, при котором
ошибки в вычислении ас по приближенной формуле
вместо точной не будут большими.
Поправку ак приближенно можно учесть, например,
таким путем. Сравним рис. НО и 109, в, г. На них
истребитель при атаке цели имеет одинаковые крены
(правый или левый). Для построения угла упрежде-
ния ф сетка должна быть отклонена в сторону, обрат-
ную крену, а для построения угла ак — по крепу, т. е.
эти углы должны строиться в противоположных направ-
лениях. Если иметь в виду, что угол а„ обычно значи-
тельно меньше угла упреждения ф, приближенно можно
учесть поправку, несколько уменьшив отклонение сет-
ки в направлении размаха самолета при нош роении
угла упреждения, т. е. считать, что
Ок = — /гфю (48)
где k— постоянный коэффициент, величина которого
меньше единицы;
177
фк—отклонения сетки в направлении размаха (в
плоскости крыльев) при построении угла упреждения.
Расчетная формула (33) для поправки
на скольжение истребителя содержит угол уск,
расположенный в плоскости, проходящей через ось
самолета и вектор скорости истребителя V,. Непосред-
ственное измерение угла уск затруднительно. Однако
можно измерять угол скольжения 0СК и угол атаки аат
самолета. Первый характеризует отклонение вектора ско-
Плоскость симметрии
Рис. 111. Углы атаки и скольжения самолета
роста Vi от плоскости симметрии самолета, а второй —
от оси самолета в плоскости симметрии (рис. 111).
Поправки на углы скольжения и атаки могут
быть определены по расчетным формулам, аналогичным
формуле (33):
<^=='гъГ ^ск’
При правильном координированном управлении по-
летом истребителя углы скольжения обычно очень малы
(не более 2—3°). Углы атаки при полете истребителей
на малых и средних высотах также невелики (не бо-
лее 4—5°). Лишь на больших высотах они могут дости-
гать 10—12°.
При стрельбе из пушек начальные скорости снаря-
дов По достигают 700—800 м/сек, поэтому отноше-
ние Vj/voi мало (не более 0,2—0,3) и поправки
можно не учитывать.
При стрельбе неуправляемыми ракетами начальные
скорости п0 малы (80—90 м/сек) и отношение Vi/noi рав-
но примерно 1. Кроме того, неуправляемые ракеты при-
178
меняются главным образом для атак наземных целей
с пикирования, когда углы атаки составляют 1—2°.
Поэтому поправки фр, фа можно вычислять по прибли-
женным формулам;
Ф₽ = ЛРСК; (49)
Фя = Лаат> (50)
где А—постоянный коэффициент, зависящий от типа
ракеты.
При стрельбе ракетами, управляемыми по радио-
лучу, поправки ф и а (см. § 28) малы. Радиолокацион-
ный луч для сопровождения обычно довольно широкий.
Все это облегчает при стрельбе ракетами, управляемыми
по радиолучу, приближенный учет поправок ф и а.
При стрельбе такими ракетами в одних АСП строит-
ся угол упреждения в соответствии с формулой (42),
но при некотором постоянном значении времени Гр,
в других — только угол ас в зависимости от высоты по-
лета истребителя.
Рабочие формулы проще расчетных, приведенных
в § 25—27. Для определения по ним угловых поправок
нужно измерять:
— угловую скорость визирной линии юв;
— дальность D;
— высоту полета И;
— углы скольжения 0Ск и атаки аат.
Следовательно, в составе АСП должны быть измери-
тели указанных параметров и Счетно-решающие устрой-
ства, вычисляющие поправки в соответствии с рабочими
формулами.
Измерители (датчики) входных параметров
(ыв, D, <Хат> Рек)
Для1 измерения угловой скорости ыв в АСП приме-
няется трехстепенной гироскоп. Применение гироскопа
для этой цели основано на его свойстве прецессировать
(поворачиваться) под действием внешней силы, прило-
женной к оси на некотором расстоянии от точки под-
веса (см. § 16). Как известно:
K^t = Pl, (51)
179
где К — кинетический момент гироскопа;
ыг — угловая скорость прецессии оси гироскопа;
Р — внешняя сила, приложенная под углом 90°
к оси гироскопа;
I—плечо силы относительно точки почвеса.
Момент Р1 создается системой коррекции гиро-
скопа. Его величина такова, что при слежении за
целью сор == <ов«
Дальность цели
циодальномером. С
D автоматически измеряется ра-
выхода
Рис. 112. Схема высотомера:
сильфон; 2 — рычаг; 3 — потенциометр;
4 — движок
радиодальномера при за-
хвате им цели в счет-
но-решающие устрой-
ства прицела поступает
напряжение uD, про-
порциональное даль-
ности.
В прицеле имеется
также оптический даль-
номер, с помощью ко-
торого летчик опреде-
ляет дальность при от-
казе радиодальномера
и вводит ее вручную
в счетно-решающие ус-
тройства.
Высота полета истре-
бителя И определяется барометрическим высотомером
(рис. 112). Его чувствительным элементом является
сильфон 1, представляющий собой гофрированную труб-
ку, запаянную с обоих концов. Сильфон поджат пружи-
ной. При увеличении высоты он расширяется, сжимая
пружину, и через рычаг 2 перемещает движок 4 потен-
циометра 3. Обмотка потенциометра имеет переменный
шаг, который выбран так, чтобы напряжение, снимае-
мое с движка при его перемещении, изменялось бы
в соответствии с функцией f(H), входящей в фор-
мулу (43).
Углы атаки аат и скольжения рск измеряются с по-
мощью датчика углов атаки и скольжения (ДУАС), ко-
торый работает как флюгер (указатель направления
•ветра) Датчик углов атаки и скольжения (рис. 113)
имеет две пары подвижных крылышек i и 2. Он уста-
навливается впереди самолета на длинной штанге 3.
180
Это нужно для того, чтобы ДУАС находился в невоз-
мущенном потоке воздуха. Ось штанги X и оси враще-
ния крылышек Y, Z параллельны осям самолета Ху,
Vi, Zi.
Если истребитель летит со скольжением, то набегаю-
щий поток воздуха будет направлен под углом рск к оси
штанги X (к оси самолета Л\) и отклонит на этот угол
крылышки 1. При наличии угла атаки произойдет откло-
нение крылышек 2. Оси крылышек жестко связаны с
движками потенциометров, которые размещены в кор-
пусе датчика 4. При повороте движков изменяется на-
Рис. 113. Датчик углов атаки и скольжения:
/, 2 — подвижные крылышки; 3 — штанга; 4 — корпус
датчика
пряжение, снимаемое с потенциометров. Это напряже-
ние, пропорциональное углам атаки и скольжения, по-
дается в счетно-решающие устройства прицела.
Применение гироскопа для вычисления
и построения угла упреждения
Гироскоп в АСП применяется не только как измери-
тель, но и как счетно-решающее устройство для вы-
числения и построения угла упреждения и угловых
поправок. Решение этих задач заключается в сле-
дующем.
На оси 1 ротора гироскопа АСП (рис 114) укрепле-
ны сферическая чашка 2 из алюминия и зеркало 5
в оправе. Оно является подвижным элементом оптиче-
ской системы прицельной головки АСП (на рис. 102 —
это подвижное зеркало 5),
181
Гироскоп устанавливается в шкиве (рис. 114) 3 на
кардановом подвесе и может свободно поворачиваться
около точки 0. Шкив 3 установлен в корпусе гироскопи-
Рис. 114. Схема устройства гироскопа;
/ — ось; 2 — сферическая алюминиевая чашка; 3 — шкив;
4 — мотор гироскопа; 5 — зеркало гироскопа; 6—пру-
жинный ремешок
ческого узла на шарикоподшипнике и соединен со шки-
вом мотора 4 пружинным ремешком 6. Мотор 4, имею-
Рис. 115. Схема установки гироскопа на самолете;
2 — чашка; 5 — зеркало гироскопа
ший центробежный регулятор числа оборотов, вращает
гироскоп с большой угловой скоростью (4000—
5000 об/мин). Ось ротора гироскопа параллельна оси
самолета (рис. 115).
182
Пусть истребитель атакует наземную цель, движу-
щуюся навстречу ему. Для учета движения цели должен
быть построен угол ф и изображение сетки отклонено от
оси X] вверх (рис. 116).
При слежении за целью в процессе пикирования ось
истребителя поворачивается против хода часовой
стрелки (рис. 115). Так как гироскоп стремится сохра-
нить свое первоначальное положение, между его осью и
осью самолета образуется угол фг; зеркало гироскопа
отклонится от перпендикуляра к оси самолета на
угол ф3=фг по ходу часовой стрелки (рис. 115).
Рис. 116. Построение гироскопом поправки на движение
цели
Как видно из рис. 102, изображение сегкн в этом
случае отклонится вверх по направлению луча Л2, т. е.
в требуемом направлении. Для простоты дальнейших
рассуждений будем считать, что углы отклонения зерка-
ла и луча равны между собой (ф3=ф на рис. 102).
Если оставить гироскоп свободным, го при слеже-
нии за целью (рис. 115) угол <р, а значит, и угол фг все
время будет увеличиваться. Чтобы гироскоп строил угол
упреждения в соответствии с формулой (42), необхо-
димо приложить к нему силу Р, пропорциональную углу
183
отклонения фс и обратно пропорциональную расчетному
времени Тр;
Р—Т'Г-- (52)
' 1 р
Сила Р вызовет прецессию гироскопа с угловой ско-
ростью р)Г. Из формул (51) и (52) следует, что
Фг = “г7’р.
Так как при слежении сеткой за целью ось гироскопа
параллельна линии цели ОЦ (рис. 116), то wr=wu и
тогда фг=ф.
Гироскоп и ч е с к и й
узел АСП, кроме гиро-
скопа, имеет электро-
магнитную систему
коррекции, которая при
отклонении гироскопа
на угол фг создает си-
лу Р, действующую на
центр чашки и изме-
няющуюся в соответст-
вии с формулой (52).
Система коррекции
(рис. 117) имеет четы-
ре магнитопровода 1,
2, 3, 4 (четвертый на
схеме не виден) с воз-
душными зазорами.
В зазорах находится
чашка 2 (рис. 114).
Рис. 117. Схема устройства системы
коррекции гироскопического узла
АСП:
/, 2 и 3 — магнитопроводы; 5 — катушки
упреждения; Кп — катушки прицеливания
Магнитный поток Ф в магнитопроводах создается ка-
тушками 5 (рис. 117), которые называются катушка-
ми упреждения (поток по магнитопроводу 3 по-
казан пунктирной линией). Потоки пронизывают вра-
щающуюся чашку в четырех местах против полюсов и
наводят в ней токи Фуко. Таким образом, чашка пред-
ставляет собой проводник с током, (вращающийся в маг-
нитном поле. По известному правилу физики, магнит-
ное поле будет тормозить движение чашки с силой
F=V4
(53)
184
где k—постоянный коэффициент, зависящий от кон-
структивных параметров гироскопического узла
и числа витков катушек упреждения;
1— величина тока в катушках;
v—линейная скорость чашки.
Гироузел устанавливается на истребитель так, что
полюсы двух магнитопроводов 1 и 3 расположены в
плоскости симметрии самолета, а магнитопроводов 2
и 4 — в плоскости, параллельной плоскости крыльев.
Рис. 118. Схема сил, действующих на чашку гироскопаз
а — вид спереди; б — вид сбоку
При прямолинейном полете истребителя полюсы систе-
мы коррекции расположены симметрично относительно
центра чашки.
Коррекционная сила Р возникает вследствие тормоз-
ных сил, действующих на чашку.
Вернемся к рассмотренному примеру атаки истре-
бителем наземной цели (рис. 115 и 116). При слежении
за целью на пикировании чашка отклоняется вверх
в плоскости симметрии самолета (рис. 118). Так как
угловая скорость чашки под действием регулятора обо-
ротов мотора гироскопа остается постоянной, величина
ее линейной скорости под полюсом, а значит, и тормоз-
ной силы будет зависеть от расстояния между серединой
полюса и центром чашки (на рис. 118 показаны тор-
мозные силы Fi, F2, Fs, Fit действующие на чашку под
каждым полюсом).
185
При отклонении оси гироскопа на угол фг (при ма-
лых углах отклонения) смещение чашки
<* = /фг,
где I — плечо коррекционной силы._
Равнодействующая сил Fh Fz, Fs, Ft и будет коррек-
ционной силой Р. Можно считать, что она приложена к
центру чашки и пропорциональна отклонению d, т. е.
углу фг. Чтобы сила Р была обратно пропорциональна
величине Тр, необходимо изменять ток в катушках упре-
ждения по формуле
л
V ур
Вектор силы Р направлен перпендикулярно к пло-
скости рис. 118,6 к читателю. Повернув этот вектор по
вращению гироскопа, можно определить направление
его прецессии (оно показано пунктирной стрелкой р).
Таким образом, гироскоп будет прецессировать за осью
самолета.
Изменение силы тока в катушках упреждения в со-
ответствии с формулой (54) обеспечивается счетно-ре-
шающими устройствами прицела.
Применение гироскопа для построения угла
прицеливания и поправок на углы атаки и скольжения
истребителя
Для учета угла прицеливания и поправок на углы
атаки и скольжения нужно отклонить изображение сет-
ки на углы ас, фо, в соответствующих направлениях.
Построение этих поправок может быть достигнуто
поворотами оси гироскопа (или зеркала гироскопа 5,
рис. 102) в плоскости симметрии и плоскости крыльев
истребителя. В некоторых АСП построение поправки Фа
осуществляется поворотом плоскопараллельной пласти-
ны 4 (рис. 102).
Поворот оси гироскопа для построения поправок до-
стигается с помощью дополнительных катушек, по ко-
торым пропускаются токи соответствующей силы и на-
правления. Дополнительные катушки размещаются на
186
полюсах магнитопроводов 1, 2, 3, 4 системы коррекции
(рис. 117).
Рассмотрим, каким путем достигается поворот оси
гироскопа, например, в плоскости симметрии самолета
при построении поправки ас.
Из схемы, представленной на рис. 110, видно, что
для построения поправки ас нужно отклонить изобра-
жение сетки вниз. Для этого нужно отклонить зеркало
(рис. 102) вверх, при этом чашка будет отклонена вниз
от оси самолета (рис. 115).
Для построения по-
правки ас служат ка-
тушки Кп, размещен-
ные на полюсах 1 и 3
(рис. 117). Они соеди-
нены последовательно,
а обмотки их намота-
ны в разных направле-
ниях. Вследствие это-
го при пропускании по
ним тока возникающий
магнитный поток Ф
под одним полюсом уси-
ливается, под другим
ослабляется.
Пусть ток i в ка-
С
тушках Кп направлен
так, что магнитный по-
ток под полюсом 1 ос-
Рис. 119. Схема сил, действующих
на чашку гироскопа, при наличии
дополнительных магнитных пото-
ков ЛФ
лабляется, а под полю-
сом 3 усиливается на величину ДФ (рис. 119). Очевид-
но, тормозная сила Ft будет меньше тормозной силы F3,
а тормозные силы под полюсами 2, 4 будут одинаковы.
Равнодействующая сила ДР, вызванная дополнитель-
ным потоком ДФ, будет направлена по оси Z-B_cropony
силы Р3. Будем, как и раньше, считать, что ДР прило-
жена к центру чашки. Повернув вектор силы ДР п.т 90°
в направлении вращения гироскопа, можно определить
направление отклонения гироскопа, вызываемое си-
лой ДР. Отклонение гироскопа будет происходить до
тех пор, пока равнодействующая тормозных сил не ста-
нет равной нулю.
187
Чтобы ось гироскопа отклонилась на угол ас, необ-
ходимо по дополнительным катушкам Кп пропускать
ток, сила которого i пропорциональна углу ас и обрат-
С ___
но пропорциональна Тр:
(55)
Угол ас в формуле (55) должен быть определен по
рабочей формуле для этого угла.
Счетно-решающие устройства АСП
Для вычисления времени Тр может быть применено
электрическое мостиковое счетно-решающее устройство
(рис. 120). Оно подключено к стабилизированному на-
Рис. 120. Схема счетно решающего устройства для вычисле-
ния расчетного времени
пряжению «ст. Левая ветвь моста включает отработоч-
ный потенциометр Пг, правая — потенциометры Пн
и По, углы поворота движков которых пропорциональны
высоте Н и дальности D. В диагональ АВ включен уси-
литель У, сигналы которого управляют приводом Пр.
Привод механически связан с движком потенцио-
метра Пт. Если напряжения иА и ив неодинаковы, то
па входе усилителя появляется сигнал, который после
188
Рис. 121. Схема элек-
трической цепи для
получения тока в ка-
тушках упреждения
обра-
выра-
Гр в
потен-
уенления управляет приводом. Привод поворачивает
движок потенциометра Пт до тех пор, пока напряже-
ния иА й ив не сравняются.
Потенциометры 77D и Пн функциональные. При по-
вороте их движков на углы, пропорциональные D и Н,
напряжения, снимаемые с движков, пропорциональны
функциям ср(£>) и f(H). Так как напряжение, снимае-
мое с движка потенциометра По питает потенцио-
метр Пн, то напряжение ив будет пропорционально про-
изведению <р(£>) f(H) (см. гл. IV).
Потенциометр Пт — линейный.
Можно считать, что угол поворота
движка потенциометра /7Т пропор-
ционален Тр, а напряжение иА про-
порционально Тр — Ат. Уменьше-
ние напряжения на постоянную ве-
личину, пропорциональную Ат, до-
стигается включением сопротивле-
ния
При равенстве напряжений иА
и ив будет решена зависимость для
Тр (см. формулу 43). Таким
зом, мостиковое устройство
батывает расчетное время
виде угла поворота движка
циометра Пт.
Сопротивления Ri, R2, R3, Rt —
сменные. Их заменой учитывается
изменение коэффициента Ат и
функций ср (D) и f(H) при стрель-
бе из пушек и различными ракетами.
И, г2 — постоянные.
В качестве усилителя применяется
или собственно электронный усилитель, в качестве при-
вода — мотор с релагом (электромагнитной муфтой)
или электромотор.
Токи /, ia , i^, могут быть получены с помощью
электрических цепей, подключенных к источнику ста-
билизированного напряжения и содержащих функцио-
нальные реостаты.
В схеме электрической цени для получения тока /
(рис. 121) угол поворота движка реостата RT пропор-
189
Сопротивления г,
электронное реле
ционален Тр. Движок управляется приводом мостико-
вого устройства, вычисляющего время Tv. Сопротивле-
ние реостата подбирается в зависимости от угла пово-
рота движка таким образом, чтобы ток J в катушках
упреждения А’у изменялся в соответствии с формулой
(54). Сопротивления гь r2, rs служат для настройки
цепи.
Схема электрической цепи для получения тока ia
показана на рис. 122. С помощью цепи создается ток
и ст
Рис. 123. Схема электрической
цепи для получения тока
Рис. 122. Схема
электрической це-
пи для получения
тока ia
С
в катушках прицеливания Кп, необходимый для построе-
ния части угла ас, изменяющейся в зависимости от вре-
мени Ур (см. формулы 44 и 47).
Реостат RT1 — функциональный. Угол поворота его
движка пропорционален величине Тр. Сопротивление
реостата в зависимости от угла поворота движка под-
бирается так, чтобы ток ia в катушках прицеливания Ка
изменялся в соответствии с формулой (55). Сопротивле-
ние R — сменное. Его заменой учитывается изменение
коэффициента а при стрельбе из пушек или различными
ракетами.
190
Схема электрической цепи для получения тока
в катушках Кат, служащих для построения поправки фИ)
показана на рис. 123.
Формула для будет аналогична формуле (55),
т. е.
(56)
Угол поворота движка потенциометра Па, находя-
щегося в ДУАС, пропорционален углу атаки аат. Угол
поворота движка функционального реостата RT2 про-
порционален величине Тр. Сопротивление его подбирает-
ся так, чтобы ток г. (в катушках Кат изменялся в со-
>в
ответствии с формулой (56).
Так как формула для % аналогична формуле для фа
(см. формулы 49, 50), то и ток в катушках КСк, слу-
жащих для построения поправки на угол скольжения,
должен изменяться по формуле, аналогичной формуле
(56). Поэтому для получения тока
может быть при-
менена такая же электрическая цепь, как и для полу-
чения тока г'ф.
В заключение рассмотрим структурную схему при-
цела АСП (рис. 124). Основными узлами прицела явля-
ются:
— прицельная головка ПГ;
— вычислитель В;
— механизм автоматического ввода высоты МН;
— ДУАС;
— радиодальномер РД;
— стабилизатор напряжения СН;
— соединительная коробка СК.
Прицельная головка (рис. 103) содержит в себе
оптическую систему (рис. 102) и гироскоп (рис. 114)
с системой коррекции (рис. 117). Она является основ-
ным узлом прицела. Элементы счетно решающих
устройств (рис. 120—123) размещены главным образом
в вычислителе и частично — в соединительной коробке,
которая через электрические кабели соединяет все узлы
прицела. Стабилизатор напряжения выдает стабилизи-
рованное напряжение ист для питания электрических
счетно-решающих устройств.
191
Прицел АСП может применяться также для бомбо-
метания с пикирования. Для этого заранее вычисляется
угол сбрасывания для расчетных высоты полета, скоро-
сти, угла пикирования самолета и характеристического
времени бомбы Этот угол устанавливается отклонением
сетки прицела вниз при повороте плоскопараллельной
пластины 4 (рис. 102). Летчик при прицеливании сов-
мещает центр сетки с целью и по достижении расчетных
Рис. 124. Структурная схема АСПз
ПГ — прицельная головка; В — вычислитель;
МН — механизм ввода высоты; ДУАС — датчик
углов атаки и скольжения; РД — радиодально-
мер; СН — стабилизатор напряжения; СК — со-
единительная коробка
условий бомбометания сбрасывает бомбы. В случае
бомбометания прицел используется как оптический ви-
зир. Гироскоп прицела заарретирован.
§ 31. ХАРАКТЕРИСТИКИ ТОЧНОСТИ ВОЗДУШНОЙ СТРЕЛЬБЫ
Характеристики точности воздушной стрельбы рас-
смотрим сначала на примере стрельбы по неподвижной
наземной цели одиночными ракетами.
Представим себе, что истребитель совершил большое
число атак цели при практически одинаковых условиях
стрельбы: дальности, угле пикирования, скорости. После
192
каждой атаки положение точки попадания ракеты фик-
сировалось относительно цели. Очевидно, что точки по-
паданий не совпадут друг с другом, а каким-то образом
рассеются относительно цели: некоторые ракеты попа-
дут в цель, а некоторые.ие попадут (рис. 125).
Рассеивание ракет при стрельбе, хотя все атаки вы-
полняются в одинаковых условиях, ракетами одного и
Рис. 125. Картина рассеивания точек попаданий
того же типа и при каждой атаке летчик тщательно
прицеливается, объясняется действием большого числа
случайных факторов, которые и вызывают случайные
отклонения точек попаданий ракет. Эти отклонения то-
чек попаданий от цели и называются ошибками
стрельбы.
Действие каждого случайного фактора вызывает ма-
лое отклонение — элементарную ошибку. Совокупное
7—320 193
действие большого числа факторов приводит к ошибкам
стрельбы.
Назовем некоторые случайные факторы, вызывающие
ошибки стрельбы:
— ошибки различных датчиков в измерении пара-
метров условий стрельбы: радиодальномера, механизма
автоматического ввода высоты, гироскопа, ДУАС
и т. д.;
— инструментальные ошибки счетно-решающих
устройств прицела;
— случайные ошибки летчика при прицеливании;
— неточности в изготовлении отдельных ракет (сна-
рядов): незначительные, в пределах допусков производ-
ства, отклонения в форме, в весе и т. п.;
— колебания и вибрации самолета, орудий.
Ошибки стрельбы определяют обычно как коорди-
наты точек попаданий в прямоугольной системе коорди-
нат, связанной с целью. При стрельбе по наземным це-
лям ось X выбирается в направлении захода на цель.
Ошибки стрельбы могут принимать, как это видно из
рис. 125, различные значения, заранее не известные.
Точность стрельбы одиночными ракетами (снаряда-
ми) характеризуют средними значениями и средними
квадратическими отклонениями ошибок стрельбы.
Средние значения ошибок стрельбы представляют со-
бой средние арифметические отдельных ошибок:
А + Хг + • + Хп
П
.. _____ У\ + Уг + • + Уп
Jcp „
(57)
где п — число атак.
Средние квадратические отклонения определяются
по следующим формулам:
_ — ХсрГ + (X; — ХсрГ + • + (Хл — ХсрР _
°-* ' п — 1 ’
г____________________7_________________ (58)
д _ Л/ (У1 — Уср)2 + (Уз — -Уср)2 + • • • + (Уи У ср)2
у ' п — 1
Средние значения ошибок характеризуют система-
тические отклонения точек попаданий — систематические
194
ошибки. Координаты лсср, z/cp определяют так называе-
мую среднюю точку попадания. При конструировании
прицелов и обучении летчиков стрельбе стремятся к то-
му, чтобы систематические ошибки были мииималь*
ными.
Средние квадратические отклонения характеризуют
степень разброса или рассеивания точек попаданий от-
носительно цели. Чем больше значения ах, ор, тем боль-
ше рассеивание, больше случайные отклонения точек
попаданий от средней точки попаданий.
По данным теоретических исследований, которыми
занимается наука — теория вероятностей, а также по
результатам большого числа экспериментальных стрельб
установлено, что закон рассеивания при стрельбе яв-
ляется нормальным. Такой закон рассеивания оши-
бок обычно имеет место тогда, когда ошибки вызы-
ваются действием большого числа случайных факторов.
Это обстоятельство и является характерным для оши-
бок стрельбы.
Сущность нормального закона рассеивания состоит
в следующем. Большая часть точек попаданий группи-
руется вблизи средней точки попаданий. Чем дальше от
средней точки, тем меньше будет попаданий. Практиче-
ски все точки попаданий при большом числе выстрелов
располагаются внутри эллипса, называемого эллип-
сом рассеивания. Полуоси эллипса равны трем
средним квадратическим отклонениям: Зох и Зсу. Центр
эллипса совпадает со средней точкой попаданий.
Внутри эллипса точки попаданий распределяются
следующим образом (рис. 125). В первой полосе от
центра эллипса шириной в одно среднее квадратиче-
ское отклонение оказывается 34% всех попаданий,
во второй—14%, в третьей — 2%. То же самое
распределение будет и для полос, параллельных
оси У.
Воздушная стрельба из пушек и ракетных орудий
ведется обычно не одиночными выстрелами, а залпами
или очередями (сериями) выстрелов, так как при такой
стрельбе больше вероятность попадания в цель и, зна-
чит, больше вероятность поражения ее.
При стрельбе залпами н очередями картина рассеи-
вания сложнее, чем при одиночной стрельбе. Дело в
7* 195
том, что при стрельбе залпами и очередями ошибки,
возникающие при выполнении предыдущих выстрелов,
влияют на отклонения последующих ракет (снарядов).
В этом случае, как говорят, выстрелы (события) зави-
симы.
Например, при стрельбе залпами или при загради-
тельной стрельбе очередями, когда прицеливание вы-
полняется лишь для момента начала стрельбы, ошибка
прицеливания вызывает отклонение всех выстрелов зал-
па, очереди. При сопроводительной стрельбе очередями
(сериями) ошибки прицеливания для первого выстрела
влияют на второй, третий и последующие выстрелы;
ошибки второго влияют на третий, четвертый и после-
дующие выстрелы и*т. д. Зависимость выстрелов^в этом
случае является сложной.
При изучении картины рассеивания прибегают к сле-
дующей схематизации этого явления. Предполагают, что
ошибки стрельбы состоят из двух групп ошибок: груп-
повых и индивидуальных. Групповые ошибки
вызывают случайные отклонения всех выстрелов залпа
(очереди), а индивидуальные —рассеивание отдельных
выстрелов в залпе (очереди). Групповые ошибки яв-
ляются следствием главным образом ошибок прицели-
вания: ошибок датчиков, инструментальных ошибок,
ошибок летчика, а индивидуальные — следствием неточ-
ностей в изготовлении отдельных ракет (снарядов),
колебаний и вибраций самолета.
Если рассмотреть картину рассеивания точек попа-
даний при стрельбе залпами, полученную по большому
числу атак,-выполненных примерно в одинаковых усло-
виях (рис. 126), можно заметить, что точки попаданий
рассеиваются относительно цели группами, соответствен-
но залпам. Такая же картина примерно будет и при
стрельбе очередями.
В случае стрельбы залпами и очередями определяют
отдельно характеристики групповых ошибок. Для этого
сначала находят координаты средних точек попаданий
залпов (очередей), по формулам, аналогичным форму-
лам (57). Затем определяют средние квадратические
отклонения оХГр. орГр групповых ошибок по формулам,
аналогичным формуле (52). Характеристики хср, z/cp,
о*, ои суммарного рассеивания, вызываемого как груп-
196
повыми, так и индивидуальными ошибками, определяют
по формулам, аналогичным формулам (57) и (58).
Отношения
у
угр
Qv
служат характеристикой степени зависимости выстре-
лов. Чем больше Кх и Ку, тем сильнее зависимость вы-
стрелов. При КХ=КУ = \ считают, что выстрелы функ-
Рис. 126. Картина рассеивания точек попаданий
при стрельбе залпами
ционально зависимы. Это значит, что по координатам
первого выстрела можно точно определить координаты
последующих выстрелов. Сильная степень зависимости
выстрелов указывает на большие ошибки прицеливания.
Высокая точность стрельбы, необходимая для высо-
коэффективных боевых действий самолетов, обеспечи-
вается:
— грамотной эксплуатацией прицелов;
— хорошим умением летчиков стрелять;
— соответствующей установкой прицельной головки
на самолете.
197
Прицел должен всегда быть исправным и содер-
жаться в чистоте. Это достигается систематическими
осмотрами, проведением регулярных регламентных ра-
бот и необходимого ремонта.
Прицельная головка устанавливается в определенное
положение на самолете при пристрелке его вооружения.
Пристрелка и ее проверка должны проводиться регу-
лярно.
198
ЧАСТЬ ВТОРАЯ
БОМБАРДИРОВОЧНОЕ ВООРУЖЕНИЕ
САМОЛЕТОВ
ГЛАВА VI
БОМБАРДИРОВОЧНЫЕ УСТАНОВКИ
Бомбардировочной установкой самолета называется
совокупность механизмов и агрегатов, с помощью кото-
рых авиационные бомбардировочные боеприпасы под-
нимают на самолет, надежно укрепляют на нем, удер-
живают во время полета к цели, подготавливают к сбра-
сыванию и сбрасывают в требуемый момент в необхо-
димых сочетаниях и последовательности.
Для решения указанных задач бомбардировочная
установка, как правило, включает: держатели, систему
сигнализации, механизмы подготовки боеприпасов к
сбрасыванию, систему управления сбрасыванием, меха-
низм управления створками бомбовых отсеков, систему
подвески боеприпасов на самолет и снятия их с само-
лета.
§ 32. ДЕРЖАТЕЛИ
Держатели после подвески на них бомбардировоч-
ных боеприпасов надежно удерживают последние на
самолете как во время его стоянки на аэродроме, гак и
во время полета к цели, а также обеспечивают сбрасы-
вание их в требуемый момент. Держатели восприни-
мают нагрузки от закрепленных на них боеприпасов и
передают эти нагрузки элементам конструкции самоле-
та, с которыми связаны посредством узлов крепления.
Конструктивно держатели могут быть или силовыми
элементами самолета, или самое гоя тельными агрега-
тами.
199
По конструкции держатели делятся на балочные —
для подвески одной бомбы, кассетные — для подвески
нескольких бомб и ящичные — для загрузки их мелкими
бомбами, а по размещению на самолете — на держате-
ли наружной подвески (подфюзеляжные, подкрыльевые)
и держатели внутренней подвески (в бомбовых отсеках
фюзеляжей, центропланов, гондол).
В зависимости от калибра загружаемых авиабомб
держатели делятся на группы: 1-я группа — для загруз-
ки бомб калибра от 1 до 25 кг\ 2-я группа — от 50 до
100 кг; 3-я группа — от 250 до 500 кг и т. д.
Держатель состоит из корпуса, являющегося основ-
ным силовым элементом; замков для удержания бое-
припасов или грузов и освобождения их при сбрасыва-
нии; узлов крепления замков к держателям; механизмов
управления замками (так называемых приводов для
открывания замков при получении импульса от команд-
ного прибора управления сбрасыванием); блокировоч-
ных контактов для обеспечения определенного порядка
срабатывания приводов; системы сигнализации наличия
бомб; механизмов «Взрыв — Невзрыв» для обеспечения
сбрасывания авиабомб на взрыв или невзрыв; упоров,
ухватов и других приспособлений, обеспечивающих удер-
жание бомбы в определенном положении и предотвра-
щающих ее раскачивание.
Балочный держатель представляет собой по-
лую балку, внутри и снаружи которой монтируются все
элементы держателя.
Балочные держатели применяются для подвески
двиабомб, ракет, топливных баков и т. п. Они крепятся
к силовым узлам самолета при помощи своих силовых
узлов, специальных стоек или подкосов.
Кассетный держатель (рис. 127) устанавли-
вается внутри бомбовых отсеков. Он представляет со-
бой две стойки 1, соединенные поперечинами 2 и обши-
тые сзади листом 3; на внутренних сторонах каждой
стойки смонтированы друг против друга защелки 4,
^предназначенные для удержания на держателе замков 5.
На наружных сторонах стоек против защелок установ-
лены: с одной стороны — электромеханические механиз-
мы 6 управления сбрасыванием бомб (приводы.), а с дру-
гой — механизмы 7 управления взрывателями «Взрыв —
200
on
Рис. 127. Типовой кассетный держатель
1 — корпус; 2 — поперечины; 3 — лист; 4 — звпр лки, б — замок, б —
приводы; 7 — механизмы «Взрыв—Испарины, в — обоймы с роликами;
S — блокировочная коробка; '10 — рукоятка, U — тяга
201
Невзрыв» (MBH); обоймы 8 с роликами, предназначен-
ными для подвески бомб; у каждого замка расположе-
на блокировочная коробка 9, подключающая привод и
механизм «Взрыв — Невзрыв» к системе управления
сбрасыванием бомб; с помощью рукоятки 10 и тяги 11
производится управление защелками при разгрузке кас-
сет от бомб.
Ящичные держатели представляют собой ме-
таллические оболочки, выполненные в форме ящиков,
внутри которых смонтированы удерживающие устрой-
ства, приводы и механизмы управления взрывателями.
Ниж.е рассматриваются устройства основных эле-
ментов держателей.
Замок является промежуточным звеном между
бомбой и балкой (стойкой) держателя. Обычно замки
снимаются с держателей (съемные замки), устанавли-
ваются на ушки бомбы и вместе с бомбами подвеши-
ваются на держатели. При подвеске бомб небольшого
калибра (50, 100, 250 кг) на держатели самолетов-
истребителей замки не снимаются. Их устройство не-
сколько отлично от устройства съемных замков кассет-
ных держателей.
Замок (рис. 128) —это плоский рычажный меха-
низм, надежно удерживающий бомбу при всех эволю-
циях самолета и быстро освобождающий ее в момент
сбрасывания.
Замок состоит из корпуса 1 с двумя выступающими
цапфами 2 для закрепления его в защелках держателя.
Внутри замка размещены две системы рычагов. Первая
обеспечивает надежное удержание в подвешенном со-
стоянии и сбрасывание бомбы, вторая — управление
взрывателями с механическими пусковыми устройства-
ми и системой сигнализации наличия бомб.
Первая система состоит из трех несущих рычагов 3
и 13, соединенных тягой 4, опорного 5 и спускового 6
рычагов, штока открывания 7 с возвратной пружиной 8
и рычага инерционного уравновешивания 12. На край-
ние несущие рычаги 3 подвешиваются бомбы, имеющие
два ушка, на средний рычаг 13 — бомбы, имеющие одно
ушко. Конец опорного рычага 5 с роликом входит в вы-
рез спускового рычага 6; спусковой рычаг своей голов-
кой входит в вырез штока 7. При подвешенной бомбе
па несущих рычагах создается момент, стремящийся
202
повернуть их по часовой стрелке, а опорный рычаг 5 —
против часовой стрелки, т. е. момент, стремящийся от-
крыть замок. Вырез спускового рычага препятствует по-
вороту конца опорного рычага, и замок не может от-
крыться.
Открытие замка производится нажатием на шток 7;
шток поворачивает спусковой рычаг вправо, преодоле-
вая трение между вырезом спускового и роликом опор-
ного рычагов; спусковой рычаг, поворачиваясь, освобож-
дает опорный рычаг. Под действием веса бомбы несущие
и опорные рычаги поворачиваются на своих осях и замок
открывается. Ролик на опорном рычаге служит для
уменьшения трения и, следовательно, усилия, необходи-
мого для открывания замка.
Вторая система рычагов управляет сбрасыванием
бомб на взрыв или невзрыв. Система состоит из следя-
щих рычагов 9 и 10, опирающихся на ушко бомбы, ры-
чага 11, тяги 14, штыря 15 и пружины 16.
При установке замка на бомбу ее ушко нажимает на
следящий рычаг 9 или 10 (в зависимости от того, на ка-
кой несущий рычаг подвешивается бомба), который по-
ворачивает рычаг 11. На этот рычаг подвешивают коль-
цо 19 троса или прутка, связанного с пусковым устрой-
ством механизма взведения взрывателя. При падении
бомбы следящие рычаги 9 и 10 могут повернуться под
действием пружины 16 и переместить рычаг 11, на кото-
ром висит кольцо 19.
Если механизм МВН не включен, то штырь 15 имеет
возможность выйти за торец цапфы 2 на 14 мм
(рис. 128, в). При этом рычаги 9, 10 и 11 делают полный
ход и кольцо 19 выпадает из замка «Взрыв — Невзрыв»,
пусковое устройство не запускает механизма дальнего
взведения и бомба падает -jia невзрыв.
При выходе штыря 15 на 6 мм (рис. 128,6) рычаги 9,
10 и 11 не могут сделать полного хода, кольцо 19 удер-
живается рычагом 11 в замке «Взрыв — Невзрыв» и бом-
ба падает на взрыв.
В верхнюю часть замка вклепана трубка 20, предна-
значенная для соединения замка с крюком по ц>ема. От
разворота относительно бомбы замок уцсржпвают упо-
ры 17 и 18.
Защелки 4 (рис. 127) служат для крепления цапф
замка в держателе. Па кассетных держателях они
203
Рис. 128. Схема типового замка:
а —замок закрыт, бомба подвешена; б —замок открыт, бомба сброшена на взрыв; я— замок открыт, бомба сброшена на
невзрыв, 1— корпус; 2— цапфы; 3 и 13— несущие рычаги; 4 и 14 — тяги; 5—опорный рычаг; 6 — спусковой рычаг; 7 —
шток открывания замка; в—возвратная пружина; 9 и 10 — следящие рычаги; // — запирающий рычаг; 12— рычаг инерцион-
ного уравновешивания; /5 — штырь; 16 — пружина; 17 и 18 — упоры; 19 — кольцо; 20 — трубка
закрепляются в направляющих стоек держателя. Каж-
дая цапфа удерживается двумя защелками: нижней —
поддерживающей и верхней — фиксирующей.
Электромеханический привод держате-
л я ПБД (рис. 129) служит для открывания замка. Он
срабатывает при посылке в его обмотку электрического
импульса от командного прибора системы управления
сбрасывания бомб. Открывание замка осуществляется
в результате усилия предварительно взведенной пружи-
ны 3 привода. Управление спуском пружины осущест-
вляется с помощью электромагнита 7.
Механизм привода размещен в закрытой коробке.
Наружу выходит штырь /, действующий на спусковой
шток замка. Для взведения механизма необходимо спе-
циальным ключом повернуть ведущий рычаг 2— взвести
спиральную пружину 3. Во взведенном состоянии приво-
да штырь 1 и связанный с ним ведущий рычаг 2 удер-
живаются опорным рычагом 4, который опирается на ро-
лик спускового рычага 5.
Якорь 6 электромагнита связан со спусковым рыча-
гом 5. При подаче тока в обмотку электромагнита 7
якорь 6, перемещаясь вниз, повернет спусковой рычаг и
освободит опорный рычаг, который в свою очередь осво-
бодит ведущий рычаг и штырь. Под действием пружины
штырь нажмет на спусковой шток замка и откроет его.
Усилие, развиваемое штырем, должно превышать усилие,
необходимое для открытия замка, в 3—4 раза. Для ком-
пенсации инерционных нагрузок, действующих на якорь 6,
служит грузик <8.
Чтобы бомбы с верхних замков не могли быть сбро-
шены раньше, чем с нижних, на кассетных держателях
предусматривается блокировка подачи импульсов тока
в обмотки приводов. Она осуществляется с помощью на-
ходящихся в коробке привода контактов 9. Электромаг-
нит привода имеет две обмотки, подключенные к боевой
и аварийной системам сбрасывания.
Механизм «Взрыв — Невзрыв» (МВН) пред-
назначен для управления сбрасыванием бомб на взрыв
или невзрыв и сигнализации наличия бомб на держате-
ле. Эти механизмы монтируются на держателе против
каждого замка. Механизм (рис. 130) состоит из корпу-
са /; электромагнита 2, имеющего две последовательно
соединенные катушки с неподвижными сердечниками;
206
207
поворотного якоря 3 с возвратной пружиной 4; штыря 5
с надетыми на него эбонитовой трубкой 6, наконечни-
ком 7, контактным кольцом 8 и возвратной пружиной
штыря 9, контактных пластин 10 сигнализации наличия
бомб и упора 11 якоря.
Взаимодействие механизма МВН с замком держателя
заключается в следующем. В исходном положении пово-
ротный якорь 3 отжат пружиной 4 (рис. 130 и 131,а).
4
Рис. 130. Механизм «Взрыв — Невзрыв» (МВН):
1 — корпус; 2 — электромагнит; 3 — поворотный якорь
электромагнита; 4 и 9 — возвратные пружины; 5 —
штырь; 6 — эбонитовая трубка; 7—наконечник, 8—кон-
тактное кольцо; iO — контактные пластины; 11 — упор
якоря; 12 — ось
Контактное кольцо <9 находится между контактными щет-
ками 10. Они замкнуты и сигнализируют о наличии под-
вешенной бомбы.
При сбрасывании бомбы на взрыв в катушки электро-
магнита 2 подается ток; электромагнит, срабатывая, при-
тягивает якорь 3, который, повернувшись на оси 12
(рис. 130), препятствует движению штыря 5 (рис. 131,6).
Под воздействием штыря замка держателя в момент от-
деления бомбы штырь 5 МВН может сделать ход на
G мм — достаточный только для размыкания контактов
208
Рис. 131. Взаимодействие МВН с замком держателяэ
а — исходное положение МВН; б — МВН в положении «Взрыв»?
в —МВН в положении «Невзрыв»; I — корпус; 3— электромагнит;
3 — поворотный якорь электронаjнита; б— ннырь; 7 — наконечник;
$ —контактное кольцо; 9 — возвратной пружина; 10 — контактные пла-
стины
209
сигнализации (выключается сигнализация «Бомба подве-
шена»). При таком положении штырей замок «Взрыв —
Невзрыв» окажется запертым, кольцо с чекой пускового
приспособления останется на замке и бомба упадет на
взрыв.
Рис. 132. Механизм подачи импульсов
(МПИ):
/ — паз; 2 — шарик ЭПУ; 3— стопорные шарнкн;
й — пружины; 5 — контактная пружина
Если бомбу сбрасывают на невзрыв, то ток в катуш-
ки электромагнитов МВН не подается. Якорь электро-
магнита остается в исходном положении. Штырь замка
продвигает штырь 5 МВН на 14 мм (рис. 131, в). При
этом щетки цепи сигнализации сходят с контактного
кольца, цепь сигнализации размыкается, сигнализируя
о сбрасывании бомбы; замок «Взрыв — Невзрыв» от-
крывается, из него выпадает устройство управления
210
взрывателями, взрыватели остаются законтренными —
бомба падает на невзрыв.
Механизм подачи импульсов (МПИ)
устанавливается при снаряжении бомб взрывателями
с электропиротехническими пусковыми устройствами,
когда механизм «Взрыв — Невзрыв» замков держате-
лей не используется.
В корпусе МПИ (рис. 132) имеется паз 1, куда
вставляется шарик 2 с присоединенными к нему про-
водами электропиротехнического пускового устройства
(ЭПУ) взрывателя; шарик 2 удерживается в пазу дву-
мя стопорными шариками 3, поджатыми пружинами 4.
К находящейся внутри паза контактной пружине 5 под-
веден ток. При сбрасывании бомбы шарик 2 ЭПУ от-
жимает стопорный шарик МПИ и скользит по контакт-
ной пружине 5. Если бомбу необходимо сбросить на
взрыв, то на пластину 5 подается ток, который через
шарик ЭПУ и провода поступает на механизм дальнего
взведения взрывателя.
§ 33. МЕХАНИЗМЫ УПРАВЛЕНИЯ СТВОРКАМИ БОМБОВЫХ
ОТСЕКОВ
На большинстве типов самолетов-бомбардировщиков
авиационные бомбы располагаются внутри самолетов —
в бомбовых отсеках, в полете закрытых створками, ко-
торые перед сбрасыванием авиабомб необходимо от-
крыть. Чтобы не сбросить бомбу на закрытые створки
отсеков, ток к электрическому приводу держателя по-
дается только после того, как они откроются. Эта бло-
кировка осуществляется концевыми выключателями
(ВК). Створки бомбовых отсеков на самолетах в основ-
ном открываются и закрываются с помощью пневмати-
ческих или гидравлических приводов с электрическим
управлением.
Работа пневматического привода заключается в
следующем (рис. 133). При закрытых створках 3
шток 1 находится внутри воздушного цилиндра 2. Пос-
ле подачи сжатого воздуха в цилиндр о г левого элек-
тропневмоклапана 4 (на открывание) шток выходит
из цилиндра, передвигает зубчатую репку 5, которая в
свою очередь вращает зубчатый сектор 6 и жестко
связанную с ним качалку 7. Качалка перемещает
211
212
тяги 8 и открывает створки бомбового отсека. В конце
открывания створок рейка 5 нажимает на рычаг конце-
вого выключателя (узел А) и переключает его. Сигнал
о том, что створки бомбового отсека открылись, по-
дается на сигнальные лампочки, расположенные на щит-
ках летчика и штурмана.
С зубчатым сектором 6 жестко связан ролик 9, от
которого идут тросы 10 через переходные ролики 11
к подобному же механизму, установленному на задней
стенке бомбового отсека. Оба механизма работают син-
хронно. Для закрывания створок бомбовогр отсека сжа-
тый воздух подается в цилиндр 2 от второго (правого)
электропневмоклапана 4 (на закрывание). Шток, зуб-
чатая. рейка и зубчатый сектор совершают обратное
движение — створки бомбового отсека закрываются.
О закрытии створок сигнализируют лампочки, располо-
женные на щитках летчика и штурмана.
Принцип работы гидравлического привода аналоги-
чен принципу работы пневматического. Разница состоит
лишь в том, что в гидравлическом приводе вместо воЗ’
духа в цилиндр подается гидравлическая смесь.
§ 34. СИСТЕМА УПРАВЛЕНИЯ БОМБАРДИРОВОЧНОЙ
УСТАНОВКИ
Управляет бомбардировочной установкой штурман
из кабины. Сбрасывание авиационных бомб может быть
аварийным и боевым (тактическим). Аварийное сбра-
сывание осуществляется в случае необходимости быст-
ро освободить самолет от бомб или в случае отказа
тактической системы сбрасывания. Боевое сбрасывание
производится с помощью электрического сбрасывателя
(ЭСЕР), распределителей импульсов по отдельным
группам держателей (коробок вариантов сбрасывания
бомб — КВСБ), включателей, жгутов, разъемов, конце-
вых выключателей, блокировочных и предохранитель-
ных устройств и исполнительных органон — приводов
держателей ПБД.
Электросхемы бомбардировочных установок могут
быть одно- или двухпроводными. При олиоироводной
схеме к каждому прибору подводится юлько плюсовой
провод, минусом является масса самолета (рис. 134).
Электросбрасыватель вырабатывает в опре*
213
деленной последовательности импульсы электрического
тока и направляет их в КВСБ. Количество импульсов и
временные интервалы между ними устанавливаются
перед бомбометанием. ЭСБР приводится в действие
с помощью боевой кнопки или контактов сбрасывания,
расположенных в бомбардировочном прицеле. КВСБ
распределяет импульсы по соответствующим группам
держателей.
Рис. 134. Принципиальная схема тактического
управления сбрасыванием бомб
Сбрасывание бомб с самолета можно производить:
одиночно, залпом (по две бомбы и более в залпе), се-
рийно (по одной) или серией залпов (по две бомбы и
более в залпе).
Электрический сбрасыватель состоит из генератора
импульсов, вырабатывающего импульсы с заданным
временным интервалом между ними; счетчика импуль-
сов (ограничителя длины серии), переключателя «Оди-
ночно»— «Серия». В положении «Одиночно» при каж-
дом нажатии на кнопку сбрасывания посылается один
211
импульс, в положении «Серия» при нажатии на кнопку
генератор вырабатывает заданное число импульсов.
Кроме названных основных функциональных блоков,
ЭСЕР имеет ряд вспомогательных устройств, а также
органы настройки.
На передней крышке электросбрасывателя (рис. 135)
расположены: рукоятка 1 установки количества импуль-
При подготовке к вылету
обработать на КМ серию из
Z-3 импульсов
1. При установке переключателя
М • на М отсчет интервалов про-
изводить по шкале М
ЛМ0.4 г. При установке пере-
7 ft в В ключателя на КМ
Рис. 135. Передняя крышка электрического сбрасывателя:
1 — рукоятка установки количества импульсов; 2 — шкала количества импуль-
сов; 3— рукоятка установки интервалов между импульсами; 4 — шкала ли-
нейных интервалов между бомбами в серин в м или км; 5 — шкала путевых
скоростей самолета в км!час\ 6 — переключатель установки линейных интер-
валов серии; 7 — переключатель установки вида бомбометания: «Одиночно»
или «Серия»; 8 — лампочка, сигнализирующая о готовности прибора к ра-
боте
сов; шкала 2; рукоятка 3 установки интервалов между
импульсами; шкала 4 линейных интервалов между
бомбами (залпами) в серии (в м или км); шкала 5 пу-
тевых скоростей самолета (в км/час); переключатель 6
установки линейных интервалов серии (в м и ш лти);
переключатель 7 установки вида бомбометания («Оди-
ночно» или «Серия»); лампочка <9, сигнализирующая
о готовности прибора к работе.
Перед бомбометанием устанавливаются количество
импульсов, интервал между ними и вид работы элек-
215
тросбрасывателя. Линейные интервалы в серии уста-
навливаются рукояткой 3, для чего величина путевой
скорости самолета (в км/час) совмещается с рассчитан-
ной или заданной величиной линейного интервала меж-
ду бомбами (залпами) серии (в м или км).
Чтобы определить временной интервал t (в сек)
между импульсами, надо разделить величину линейного
интервала I (в м) на путевую скорость W самолета
(в м/сек), т. е.
При установке переключателя 77 j (рис. 136) в поло-
жение «Одиночно», независимо от положения контак-
тов 3—4, ток от плюса источника питания через про-
вод а и переключатель П\ пройдет на лампочку Л.
При нажатой боевой кнопке К (или замкнутых контак-
тах П прицела) ток от плюса источника питания через
провод а, переключатель /7,, боевую кнопку К и кон-
такты т поляризованного реле поступит на обмотку
исполнительного реле Р2. Оно сработает. Через замк-
нувшиеся контакты 1—2 ток подается в один или два
канала (в зависимости от положения переключателя
П2) коробки вариантов сбрасывания При опускании
боевой кнопки подача тока прекращается, повторное
нажатие приводит к посылке второго импульса.
Для автоматической выработки требуемого количе-
ства импульсов необходимо установить переключа-
тель 77] в положение «Серия». Рукоятку 1 (рис. 135) по-
вернуть по ходу часовой стрелки до совмещения -индекса
с заданным числом бомб в серии При этом замкнутся
контакты счетного механизма 3—4 и, следовательно, пита-
ние будет подано на лампочку Л, к боевой кнопке К
(к контактам прицела 77), а также через переключа-
тель ГЦ к контакту 5 блокировочного реле Р3. Если те-
перь нажать на боевую кнопку К или замкнуть кон-
такты П прицела, ток поступит на обмотки реле Р2
и Р3. Реле Р2 сработает и замкнет контакты 1—2 и
7—8. Через контакты 1—2 пойдет первый импульс тока
и сработает реле Р2. Рукоятка установки залпов в се-
рин вместе с храповым колесом 9 переместится на
одно деление. Блокировочное реле Рз, сработав, замк-
нет контакты 5—6, шунтирующие боевую кнопку. Пос-
216
ле этого ЭСЕР будет работать автоматически незави-
симо от того, нажата боевая кнопка К или нет.
При замкнутых контактах 7—8 токи в обмотках wt
и w2 поляризованного реле Pi направлены навстречу
друг другу, причем через обмотку w2 протекает умень-
шающийся с течением щремени зарядный ток конденса-
тора С. Магнитный поток обмотки wi направлен против
Рис. 136. Принципиальная схема устройства электросбрасывателя?
Pi — поляризованное реле; Р2 — исполнительное реле; Р9 — блокировочное
реле; — обмотки поляризованного реле; п — кон in к л i Пол.|ризЪван-
ного реле; К — боевая кнопка сбрасывания; П — контакт сбрасывания бомб
в прицеле. Hi — переключатель «Одиночно» — «Серия»; z/j цр|н,клк>чатель
сбрасывания по одной или по две бомбы в залпе; С — конденсатор; Сч — ме-
ханизм подсчета импульсов тока; Л — лампочка сигнализации i отшитое ги
прибора к работе; /—2, 3—4, 5—6, 7—5 — электрические контакты; SZ — храпо-
вое колесо счетного механизма; 10— поводок; 11— анкерное ycipoflcmo
магнитного потока постоянного магнита, магнитный же
поток обмотки ау2 согласован с ним. Через некоторое
время после замыкания контактов 7—8 магнитный по-
ток обмотки W] станет больше суммарного магнитного
потока обмотки со2 и пос гоя иного магнита. Реле Pi
217
сработает, якорь его перебросится из положения т в по-
ложение п. После размыкания контактов т реле Р2
обесточивается, контакты 1—2 и 7—<8 размыкаются,
прекращается подача импульса тока во внешнюю цепь;
прекращается питание поляризованного реле Pt, начи-
нается разряд конденсатора С.
При разрядке конденсатора С магнитные потоки об-
моток w, и ау2 согласованы и направлены против маг-
нитного потока постоянного магнита. Когда напряже-
ние конденсатора уменьшится, магнитный поток посто-
янного магнита станет больше суммарного магнитного
потока обмоток и w2 и якорь поляризованного реле Pi
возвратится в исходное положение т. В дальнейшем
описанный цикл работы будет повторяться с частотой,
зависящей от величины введенных сопротивлений R] и R2.
Посылка каждого импульса сопровождается сраба-
тыванием счетного механизма. Вместе с его храповиком
поворачивается рукоятка установки залпов в серии. При
отработке последнего импульса поводок 10 размыкает
контакты 3—4, подключающие прибор к внешнему ис-
точнику питания. Работа ЭСЕР прекращается.
Коробка вариантов сбрасывания
(КВСБ)—это специальное устройство, состоящее из
четырех реле,установленных водной коробке (рис. 137),
и предназначенное для распределения поступающих от
ЭСЕР импульсов тока по держателям. Коробка может
распределять импульсы между двумя группами держа-
телей. Каждая пара реле Рь Р2 и Р3, Р4 соединена
с первым приводом держателя, а через выключатели
«/» или «//»— с источником питания. Импульсы тока
поступают в КВСБ от ЭСЕР через контакт Г. Кроме
того, при бомбометании залпом (по две бомбы в зал-
пе) КВСБ присоединяется к ЭСЕР через установщик
числа бомб в залпе (УЗ) и контакт Ж.
Если включены оба выключателя («I» и «II») пита-
ния КВСБ, то сработают реле Р} и Р3 и перебросят
свои контакты 1—2—3 в правое положение. Первый им-
пульс тока от электросбрасывателя пройдет через кон-
такты 3 и обмотку а реле Pi и попадет на первый при*
вод своей группы держателей (будет сброшена первая
бомба). Этот же импульс заставит сработать реле Р2.
После прекращения импульса реле Pt перебросит свои
218
контакты 1—2—3 в левое положение и подсоединит
ЭСЕР ко второй группе реле.
Второй импульс будет воспринят второй группой
реле и направлен в первый привод второй группы дер-
жателей. После того как второй импульс заставит сра-
ботать реле Ра, контакты всех реле одновременно вер-
нутся в исходное положение и очередной импульс опять
будет воспринят реле Pi и по тому же проводу направ-
Рис. 137. Схема включения коробки вариантов сбрасывания
(КВСБ)
лен в первую группу держателей для сбрасывания сле-
дующей бомбы и т. д.
Включение цепи следующего привода происходит
лишь в результате срабатывания предыдущего, т. е.
замыкания его блокировочных контактов (рис. 129).
Этим исключается возможность сбрасывания верхней
бомбы на нижнюю, если она не была предварительно
сброшена.
Для залпового сбрасывания бомб между ЭСБР и
КВСБ помещается установщик залпов (УЗ). Чтобы
сбросить серию залпов (по две бомбы в залпе), УЗ
устанавливается так, что один импульс электросбрасы-
219
вателя поступает одновременно и на реле Pj, и на
реле Р3.
Чтобы не сбр'осить бомбу на закрытые створки бом-
бовых отсеков, исполнительная цепь боевого сбрасыва-
ния включается через концевой выключатель, располо-
женный в механизме открывания створок бомбовых от-
секов. Концевой выключатель замкнет эту цепь только
при открытых створках бомбового отсека.
Для боевого (тактического) сбрасывания бомб не-
обходимо включить «Главный выключатель» (рис. 137),
т. е. поставить рукоятки и переключатели ЭСЕР в со-
ответствии с заданием, включить включатели КВСБ,
поставить в заданное положение УЗ (по одной или по
две бомбы в залпе), открыть створки бомбового отсе-
ка, кратковременно нажать боевую кнопку или замк-
нуть контакты прицела.
Для контроля готовности системы управления бое-
вым сбрасыванием применяется световая сигнализация
(«Готов»), лампочка которой загорается после всех
подготовительных операций.
Система аварийного сбрасывания бЬмб
включается обычным выключателем, замыкающим цепь
аварийного открывания створок бомбовых отсеков и
подающим ток на аварийные обмотки приводов ПБД.
При замыкании цепи аварийного сбрасывания бомбы
одновременно сбрасываются со всех групп держателей.
Аварийное сбрасывание можно производить на
взрыв (при сбрасывании над территорией противника)
или невзрыв (при сбрасывании над своей территорией).
Оно всегда включено на невзрыв. Если нужно сбросить
бомбы на взрыв, включается включатель, подающий ток
в обмотки электромагнитов МВН.
Аварийное сбрасывание на самолетах-бомбардиров-
щиках, как правило, могут производить и штурман, и
летчик, для чего у каждого имеется свой аварийный вы-
ключатель (кнопка). Эти выключатели закрываются
специальными колпачками и пломбируются.
§ 35. МЕХАНИЗМЫ ЗАГРУЗКИ САМОЛЕТА БОЕПРИПАСАМИ
Для подъема авиационных бомб на самолет приме-
няются: система электромеханических лебедок, состоя-
щая из тележки со смонтированными на ней электрома-
220
Рис. 138. Схема подъема бомб крупного калибра на кассет-
ный держатель:
/ — пульт управления; 2 — электромеханические лебедки; 3— ролико-
вый блок; 4 — полиспасты; 5 — тросы; 6 — шланги питания; 7 —рас-
пределительная коробка; 8— распределительная коробка; Р — коробка уп-
равления; 10 — тележка
221
шинными усилителями, коробки управления, кабелей
питания и пультов управления подъемом бомб; пере-
ходные кронштейны для крепления лебедок на самоле-
ты; балки, ролики и пояса подъема; полиспасты и т. д.
Подъем бомбы крупного калибра на кассетный дер-
жатель происходит следующим образом (рис. 138).
Электромеханические лебедки 2 устанавливаются на
Рис. 139. Установка рукоятки подъема на
лебедку
самолете на соответствующие кронштейны; от лебедок
чер^з роликовые блоки 3 и полиспасты 4 идут тросы 5
к J1 однимаемой бомбе; шланги питания 6 подсоединя-
Ютс5я к распределительной коробке самолета 7 или к
аэродромному источнику питания через распределитель-
ную коробку 8.
11осле монтажа всей системы подъема убеждаются
11 11 адежности крепления тросов и плавно отклоняют
рукоятки на пульте управления (на подъем). При этом
слс-дят за движением бомбы, уменьшая скорость подъема
222
перед вводом замка в направляющие держателя. Для
прекращения подъема необходимо вернуть рукоятку
пульта в исходное положение.
При отсутствии аэродромного источника питания ле-
бедки позволяют вести подъем бомб вручную, для чего
снимают защитный колпачок с хвостовика лебедки, на-
девают на хвостовик ручку ручного привода (рис. 139)
и застопоривают ее стопором.
§ 36. ОБЩИЕ СВЕДЕНИЯ ПО ЭКСПЛУАТАЦИИ
БОМБАРДИРОВОЧНЫХ УСТАНОВОК
Эксплуатация бомбардировочных установок вклю-
чает осмотры и подготовку их в соответствии с дейст-
вующими инструкциями и едиными регламентами по
технической эксплуатации вооружения самолетов.
При подготовке бомбардировочных установок необ-
ходимо прежде всего убедиться в том, что их выключа-
тели находятся в исходном (выключенном) положении,
после чего приступить к проверке и подготовке уста-
новки. Проверяется работоспособность установки, ис-
правность системы сигнализации наличия бомб на
держателях, состояние других агрегатов бомбардировоч-
ного вооружения. При' подготовке установки к примене-
нию выполняются все работы, предусмотренные едины-
ми регламентами и инструкциями. Одновременно с под-
готовкой бомбардировочных установок мо1ут произво-
диться подготовка к подвеске авиабомб (расгаривание,
осмотр и т. д.) и подготовка средств их транспорти-
ровки.
После выполнения, указанных работ начинают пот-
веску авиабомб на самолет. При этом должны быть
приняты необходимые меры безопасности:
— открывать створки бомбовых отсеков только пос-
ле подачи команды «От люков» и получения оиичного
сигнала от специалиста, находящегося внизу (вне само-
лета), который, раньше чем дать огвечпып сигнал,
убеждается, что под створками бомбовых ои-еков ни-
кого нет (то же самое и при их закрытии);
— работать в бомбовых отсеках только при выклю-
ченных выключателях в цепи управления створками
бомбовых отсеков;
223
— при подвеске бомб находиться кому бы то ни
было в кабинах штурмана и летчика, а также под под-
нимаемой бомбой запрещается.
Загрузка самолета авиабомбами производится в со-
ответствии с инструкцией по эксплуатации вооружения
данного типа самолета. Начинается она, как правило,
с загрузки передних держателей; при этом с загружае-
мого держателя снимаются замки со всех станций. На
бомбу устанавливается замок, крюк подъема с тросом
зацепляется за шейку замка, и с помощью лебедок она
поднимается и устанавливается на защелки соответст-
вующей станции.
Взрыватели ввертываются до или после подвески
всех бомб. Пусковые устройства взрывателей подсоеди-
няются к соответствующим механизмам подачи импуль-
сов или механизмам МВН.
После подвески авиабомб производится осмотр под-
готовленного к вылету самолета. При осмотре убежда-
ются, что цапфы замков надежно удерживаются защел-
ками, в авиабомбы правильно ввернуты взрыватели, а
пусковые устройства взрывателей правильно подсоеди-
нены к механизмам подачи импульсов.
По окончании подготовки самолета необходимо про-
верить, не оставлены ли в бомбовом отсеке инструмент
и агрегаты системы подъема бомб.
После полета путем опроса летного состава и
осмотра бомбардировочного вооружения выясняют,
были ли отказы в работе бомбардировочной установки,
и приводят ее в состояние боевой готовности. Обнару-
женные при осмотре неисправности должны быть немед-
ленно устранены.
При наличии несброшенных бомб необходимо вни-
мательно проверить их положение в бомбовом отсеке,
принять меры против случайного падения бомб, а затем
вывернуть все взрыватели.
В процессе эксплуатации в зависимости от налета
самолета на бомбардировочных установках выполня-
ются регламентные работы, сроки и объем которых
определены едиными регламентами технической экс-
плуатации Для выполнения регламентных работ и
осмотров предусматривается необходимая контрольно-
проверочная аппаратура.
224
ГЛАВА VII
ОСНОВЫ ПРИЦЕЛИВАНИЯ
ПРИ БОМБОМЕТАНИИ
§ 37. ЗАДАЧА ПРИЦЕЛИВАНИЯ
Бомбометанием называют сбрасывание с самолета
(или вертолета) авиационных бомб, предназначенных
для поражения заданной цели Чтобы обеспечить попа-
дание в цель, перед сбрасыванием бомбы выполняют
прицеливание. Разберем, в чем заключается ыдача при-
целивания.
Допустим, что с самолета, находящеюся в точке О,
сбрасывается бомба (рис. 146). Поместим в точке О
начало прямоугольной системы координат XYZ. Одну
8—320 225
из осей, а именно ось Z, направим вертикально вниз.
Две другие оси X и Y расположим горизонтально.
Сброшенная с самолета бомба опишет некоторую
траекторию. Точку С, в которой произойдет взрыв, при-
нято называть точкой падения бомбы. Траекто-
рия движения сброшенной бомбы в общем случае пред-
ставляет пространственную кривую, не лежащую в од-
ной плоскости. Положение точки падения бомбы С
относительно точки ее сбрасывания можно определить
вектором А, который называют относом бомбы.
Спроектируем вектор А на оси координат X, Y и Z.
Соответствующие проекции обозначим Ах, Ау и Az.
Проекции вектора А на оси X, Y, Z являются коорди-
натами точки С падения бомбы, определяющими ее по-
ложение относительно точки сбрасывания О.
Координата Лг точки падения бомбы равна высоте
сбрасывания Н.
Значения двух других координат Ах и Ау точки па-
дения бомбы зависят от целого ряда факторов: от вы-
соты сбрасывания И, скорости самолета в момент сбра-
сывания, скорости ветра, баллистических характеристик
бомбы, которые в свою очередь определяются формой,
размерами и весом бомбы. Зная условия, при которых
сбрасывается бомба, т. е. высоту, скорости самолета и
ветра, а также баллистические характеристики бомбы,
можно вычислить координаты Ах, Ау и, следовательно,
определить положение точки, в которую попадает сбро-
шенная с самолета бомба.
Но сброшенной бомбой необходимо попасть в цель.
Поэтому координаты точки падения бомбы должны со-
ответствовать такому положению цели относительно
самолета, при котором сброшенная с самолета бомба
в эту цель попадет. Такое положение цели называют
требуемым положением. Координаты Ах и Ау*
можно считать требуемыми координатами цели, т. е.
координатами, определяющими требуемое положение
цели, относительно самолета в момент сбрасывания
бомбы.
Рассмотрим теперь, как решается задача прицели-
вания.
* Третью координату Аг мы в дальнейшем рассматривать не
будем, так как она всегда равна высоте полета.
226
Положим, что самолет находится в точке О, а
цель — в точке Е (рис. 141). Как и прежде, поместим
на самолете, т. е. в точке О, начало прямоугольной си-
стемы координат XYZ. Положение цели относительно
самолета можно определить вектором d, который назы-
вают фактической дальностью цели. Три его
проекции х, у и z на оси координат будут фактическими
координатами цели Е, определяющими ее положение
относительно самолета. При этом одна из координат
(координата г) равна высоте полета Н. Две другие ко-
рне. 141. Фактические и требуемые координаты цели
ординаты х и у могут быть определены с помощью при-
цела.
Поступим следующим образом. Предполагая, что в
точке О может быть сброшена бомба, вычислим требуе*
мые координаты цели Дх и Av. При относительном по-
ложении цели Е и самолета О фактические координаты
цели х и у не равны ее требуемым координатам Ах
и Av. Это означает, что бомба, сброшенная в точке О,
в цель не попадет. Чтобы попасть в цель, будем управ*
лять движением самолета так, чтобы разность между
фактическими и требуемыми координатами убывала.
Когда фактические координаты цели окажутся равными
ее требуемым координатам, самолет будет находиться в
точке сбрасывания бомбы. Сброшенная в этой точке
бомба попадет в цель.
8*
227
Таким образом, задача прицеливания при бомбоме-
тании состоит в том, чтобы вывести самолет в точку
сбрасывания бомбы, в которой фактические координаты
цели равны ее требуемым координатам.
§ 38. ВЫЧИСЛЕНИЕ ТРЕБУЕМЫХ КООРДИНАТ
Рассмотрим, как вычисляются требуемые координаты
цели в штилевых условиях, т. е. при отсутствии ветра.
Требуемые координаты цели при безветрии можно
Рис. 142. Траектория движения бомбы при
отсутствии сопротивления воздуха
рой рассматривается движение бомбы с учетом сопро-
тивления воздуха.
В момент сбрасывания с самолета бомбе сообщается
начальная скорость, равная скорости движения самолета
относительно воздуха, т. е. воздушной скорости V
(рис. 142).
После сбрасывания на движущуюся бомбу будут
действовать сила притяжения ?емли и сила сопротивле-
ния воздуха, которая зависит от его плотности, скоро-
сти движения и баллистических свойств бомбы. Эти свой-
ства определяются ее весом, размерами и формой,
228
При отсутствии ветра траектория движения бомбы
представляет плоскую кривую, лежащую в вертикаль-
ной плоскости, проходящей через векгор начальной ско-
рости бомбы (т. е. через • вектор воздушной скорости
самолета И).
Допустим, что после сбрасывания бомбы самолет
продолжает двигаться горизонтально, прямолинейно и
равномерно. Если бы не было сопротивления воздуха, то
горизонтальная составляющая скорости бомбы остава-
лась постоянной и равной воздушной скорости са-
молета V. Поэтому бомба все время находилась бы
под самолетом, снижаясь под действием силы тя-
жести.
В момент падения бомбы на землю в точке Со само-
лет оказался бы над этой точкой, т. е. в точке Мо. Но
вследствие сопротивления воздуха горизонтальная со-
ставляющая скорости бомбы постепенно убывает. По-
этому она начинает отставать от самолета (рис. 143).
В момент ее падения (точка Со) самолет, пройдя за
время Т падения бомбы путь, равный VT, окажется в
точке Л40. Можно сказать, что за время своего падения
бомба отстала от самолета на величину А. Эту вели-
чину называют отставанием бомбы, а угол у, под
229
которым точка падения бомбы видна с самолета, на-
зывают углом отставания. Из рисунка видно, что
tgr-4- <м>
Положение точки падения бомбы Со относительно
точки ее сбрасывания О определяется вектором Ао, ко-
торый называют штилевым относом бомбы.
Горизонтальную проекцию До гор штилевого относа бом-
бы называют горизонтальным штилевым относом.
Из рис. 143 видно, что отставание
Д=ГГ-Л0гор. (60)
Время падения бомбы Г, штилевой горизонтальный
Пикирование кабрирование
Рис. 144. Угол пикирования и кабрирования
баллистическими элементами или баллистическими
функциями. Баллистические функции зависят от балли-
стических свойств бомбы и от условий ее сбрасывания.
При сбрасывании бомбы на горизонтальном полете
условия сбрасывания определяются высотой полета //
и модулем воздушной скорости V. При сбрасывании
бомбы на пикировании или на кабрировании условия
сбрасывания определяются высотой Н, модулем воз-
душной скорости V и углом пикирования или углом
кабрирования X (рис. 144).
Баллистические свойства бомбы принято выражать
характеристическим временем 0. Оно чис-
ленно равно времени падения бомбы в нормальных ат-
мосферных условиях *, сброшенной на горизонтальном
* Нормальные атмосферные условия соответствуют междуна-
родной стандартной атмосфере: давление воздуха иа уровне моря
/’ 7(>() ил< рт. ст. и температура воздуха 15° С.
230
полете с высоты 2000 м при воздушной скорости
40 м)сек *.
Характеристическое время большинства бомб лежит
в пределах 20,35—23,00 сек. В отдельных случаях оно
может достигать и больших значений. Чем лучше бал-
листические свойства бомбы, тем меньше ее характери-
стическое время.
В результате решения задачи баллистики составля-
ются баллистические таблицы отдельно для сбрасыва-
ния бомб с горизонтального и с негоризонтального по-
лета. В баллистических таблицах для горизонтального
полета приводятся значения времени падения Т и от-
ставания бомбы Д, а для негоризонтального полета
(для пикирования и кабрирования)—значения времени
падения бомбы Т и горизонтального штилевого относа
(для сокращения штилевой горизонтальный относ в бал-
листических таблицах обозначается буквой А без ин-
дексов). Образцы баллистических таблиц для отстава-
ния и штилевого горизонтального относа бомбы приве-
дены в табл. 2 и 3. Баллистические таблицы для вре-
мени падения бомбы имеют такой же вид.
Таблица 2
Баллистические таблицы для бомбометания с горизонтального
полета (образец)
Отставание Д 0 = 21,25 сек
н 600 650 700 750 800 850 900
6400 2074 2333 2608 2899 3204 3521 3857
6800 2175 2444 2730 3032 3349 3678 4027
7200 2274 2553 2849 3161 3490 3831 4192
7600 2370 2658 2964 3287 3627 3979 4353
8000 2463 2761 3076 3409 3760 4124 4511
8400 2552 2858 3182 3525 3887 4263 4663
8800 2639 2954 3286 3639 4012 4401 4815
* Характеристическое время было введено в середине двадца-
тых годов. Принятые при его определении значения высоты и ско-
рости соответствовали летным характеристикам самолетов того вре-
мени.
231
Таблица 3
Баллистические таблицы для бомбометания
с негоризонтального полета (образец)
Относ А
X = —40° 0 = 21,25 сек
Ч. V 600 650 700 750 800 850 900
600 583 597 609 619 628 636 613
800 737 758 776 792 806 819 830
1000 878 906 931 953 973 990 1005
1200 1009 1044 1075 1103 1128 1151 1171
1400 ИЗО 1172 1210 1244 1275 1303 1328
1600 1244 1293 1337 1377 1414 1447 1477
2000 1452 1514 1571 1623 1670 1714 1753
При ветре относ бомбы А будет отличаться от шти-
левого относа Ао В связи с этим возникает необходи-
мость учета влияния ветра на относ бомбы.
Скорость ветра в различных географических пунк-
тах неодинакова. Кроме того, в одном и том же пункте
она неодинакова на различных высотах. Наконец, ско-
рость ветра изменяется со временем. Вследствие этого
точно учесть влияние ветра на движение самолета и на
относ бомбы практически невозможно. Поэтому при ре-
шении этой задачи принимают некоторые допущения
или, как говорят, гипотезы о ветре.
Основное допущение заключается в гипотезе о по-
стоянстве ветра. Гипотеза эта состоит в том, что в рай-
оне цели на различных высотах скорость ветра считают
одинаковой и не меняющейся со временем. Кроме того,
считают, что ветер горизонтален, т. е., что вектор ско-
рости ветра U всегда расположен в горизонтальной пло-
скости.
Для бомб с характеристическим временем до
23,00 сек принятые гипотезы о ветре не приводят к боль-
шим ошибкам. Для бомб с характеристическим вре-
менем больше 23,00 сек ошибки могут оказаться недо-
пустимо большими В этих случаях приходится хотя бы
приближенно учитывать изменение’ скорости ветра на
различных высотах.
232
При гипотезе о постоянстве ветра его влияние на
относ бомбы учитывается просто: постоянный ветер из-
меняет относ бомбы на величину, равную произведению
вектора скорости ветра U на время па тения бомбы Т,
т. е. на величину UT. Следовательно, относ бомбы с уче-
том ветра
(61)
Рассмотрим, как влияет ветер на движение само-
лета.
Относительно воздуха самолет движется с воздуш-
ной скоростью V. Воздух движется относительно земли
со скоростью ветра U. Вместе с воздухом относительно
земли движется и находящийся в нем самолет. Поэтому
скорость самолета W относительно земли сложится из
воздушной скорости V и скорости ветра U:
W=v+U (62)
Скорость W самолета относительно земли называют
путевой скоростью.
Из равенства (62) видно, что путевая скорость са-
молета W равна векторной сумме воздушной скорости V
и скорости ветра U. Векторный треугольник OMN
(рис. 145) называют навигационным треуголь-
ником скоростей. Чтобы его построить, надо
знать величину и направление векторов V и U.
Направление вектора V задается относительно ли-
нии меридиана углом К — курсом самолета, на-
правление вектора U — углом 8 — углом ветра. Век-
тор путевой скорости W составляет с линией меридиана
угол ПУ, который называют путевым углом.
Углы К, 8 и ПУ отсчитываются от северной части ли-
нии меридиана по ходу часовой стрелки и могут изме-
няться от 0 до 360°.
Вектор путевой скорости U составляет с вектором
воздушной скорости V угол сноса а. Угол сноса, от-
считанный вправо (правый снос), считают положитель-
ным (рис. 145), отсчитанный влево (левый снос)—от-
рицательным (рис. 146). Угол сноса уменьшается с уве-
личением воздушной скорости самолета. При современ-
233
ных скоростях он практически не превосходит
±(20—25?).
Из рис. 145 и 146 видно, что путевой угол
ПУ = К + а, (63)
если
то
т. е. алгебраической сумме курса К и угла сноса а. На-
самолета К=73°, а угол сноса а =
= +8°, то путевой угол ПУ =
= 73° + 8° = 81°,
сноса а = —8°,
= 73° —8°=65°,
угол
ПУ =
пример, если курс
Рис. 145. Навигационный тре-
угольник скоростей
Рис. 146. Отрицательный угол
сноса (левый снос)
Вектор скорости ветра U составляет с вектором воз-
душной скорости V угол е, который называют курсо-
вым углом ветра. Курсовой угол ветра отсчиты-
вается от направления вектора V по ходу часовой
стрелки и может изменяться от 0 до 360°. Из рис. 145
видно, что курсовой угол ветра
е = 8 — К,
(64)
т. е. разности угла ветра 8 и курса самолета К. Это
следует из того, что в треугольнике ОРМ угол 8 яв-
ляется внешним углом, а углы К и 3 — внутренними.
Вертикальную плоскость OPM0N0 (рис. 147), прохо-
дящую через вектор воздушной скорости V, называют
234
плоскостью курса самолета, a OPMN, проходя-
щую через вектор путевой скорости W,— плоскостью
пути.
§ 39. ПРИЦЕЛЬНАЯ СХЕМА
Прицельной схемой называют геометрическую схему
(рис. 147), определяющую положение точки падения
бомбы относительно точки сбрасывания, или, иначе го-
воря, определяющую требуемое положение цели относи-
тельно самолета в момент сбрасывания бомбы.
Прицельная схема при сбрасывании бомбы с гори-
зонтального полета может быть построена следующим
образом.
При безветрии бомба, сброшенная в точке О, упадет
в точке Со, а самолет в момент ее падения окажется
в точке Мо. Так как за время Т падения бомбы ветер
дополнительно снесет бомбу на величину UT, то при
ветре бомба упадет в точке С. На ту же величину UT
будет снесен за время падения бомбы и самолет. По-
этому в момент падения бомбы самолет окажется в точ-
ке М. Точка падения бомбы С будет отклонена от пло-
скости пути па величину d — FC (отрезок FC перпенди-
кулярен к плоскости пути). Найдем величину отклоне-
ния д. .
235
Из прямоугольного треугольника CFN следует, что
FC — CN sin а,
или, так как FC=d, a CJV~C0N0=A:
д = Д sin a (65)
Таким образом, точка падения бомбы С отклоняется
от плоскости пути на величину d = Asina при правом
сносе вправо, а при левом сносе — влево. Если угол сно-
са 0=0,10 и отклонение бомбы от плоскости пути будет
равно нулю.
§ 40. ФОРМУЛЫ ДЛЯ ВЫЧИСЛЕНИЯ ТРЕБУЕМЫХ
КООРДИНАТ ЦЕЛИ
Формулы для вычисления требуемых координат цели
зависят от выбора направления осей X и Y системы ко-
ординат XYZ (рис 140 и 141). Мы ограничимся только
тем случаем, когда ось X направлена по вектору путе-
вой скорости IV7 и, следовательно, ледшт в плоскости
пути самолета (рис. 148).
Как видно из рисунка, проекции вектора А на оси X
и Y
AX = PF и AV = PG — FC.
23G
Так как PF = PN ~ FN, где PN=OM= WT, a FN—
= CN cosa=Acosa и, кроме того, /7С = A sin а,_ после под-
становки получим следующие формулы для вычисления
требуемых координат цели:
Ах = WT — Д cos а; 1
А, _ 4 sin., |
Для нанесения массированных ударов применяют се-
рийное и групповое бомбометание. При серийном бом-
бометании с самолета последовательно, через опреде-
ленные промежутки времени, сбрасывается серия бомб.
Если это осуществляется с горизонтального прямоли-
нейного полета и при постоянной скорости самолета
(рис. 149), то точки падения всех бомб серии отклоня-
ются от плоскости пути на одну и ту же величину
Asin а.
Следовательно, точки падения всех бомб серии рас-
положатся на одной прямой, смещенной относительно
плоскости пути. Эту прямую называют линией раз-
рывов.
При серийном бомбометании прицеливание выпол-
няется с таким расчетом, чтобы цель накрылась сере-
диной сери#. При этом точка падения С| головной
237
(первой) бомбы серии расположится с недолетом относи-
тельно цели Е.
Требуемая дальность цели D при сбрасывании го-
ловной бомбы не равна ее относу А. Поэтому в случае
серийного бомбометания при вычислении требуемых ко-
ординат цели необходимо ввести поправку, учитываю-
щую длину серии L.
При серийном бомбометании требуемые координаты
цели, как следует из рис. 149:
Yc = Ay.
Подставив в полученные равенства значения Ах и Ау
из формул (66), получим:
Лс = WT — Д cos а + -у ;
Yc — Д sin а.
(67)
При групповом бомбометании бомбы сбрасываются
одновременно со всех самолетов группы по сигналу ве-
дущего в группе, который и выполняет прицеливание.
Если он будет стремиться попасть в цель, то бомбы,
сброшенные ведомыми, упадут с недолетом. Чтобы со-
вместить с целью среднюю точку падения всех бомб,
сброшенных группой, необходимо уменьшить значение
требуемой координаты Лс.г на величину, равную поло-
вине глубины Г построения боевого порядка группы.
Следовательно, требуемые координаты цели необходимо
вычислять по формулам:
г — WT — Д cos а 2 ;
(68)
Ус. г — Д sin а.
§ 41. ОПРЕДЕЛЕНИЕ ФАКТИЧЕСКИХ КООРДИНАТ ЦЕЛИ
Для определения фактических координат цели при-
меняют оптические и радиолокационные визирные си-
стемы. Оптическая визирная система (ОВС) позволяет
измерить два угла: ср и р (рис. 150), определяющие на-
238
правление линии ОЕ (самолет — цель). Угол tp назы-
вают углом визирования, а угол р— углом
наклона визирной линии. Чтобы определить эти
углы, необходимо сначала направить на цель визир-
ную линию оптической системы.
Направление визирной линии оптической системы
изменяется, если вращать призмы призменного узла
оптической системы. Визирная линия будет направлена
на цели в том случае, если перекрестие, находящееся в
поле зрения оптической системы, будет наложено на
цель. Углы <р и (1 пропорциональны углам отклонения
призм призменного узла и нанесены на своих шкалах.
Зная углы <р и р и высоту полета Н, можно найти фак-
тические координаты цели х и у.
Выведем формулы, связывающие фактические ко-
ординаты цели х и у с координатами <р и р, измеряе-
мыми ОВС. Как видно из рис 150:
г I <
239
Но так как PF=x, EF—y и, кроме того, OF— Н/cos ср,
после подстановки получим:
tgF = -n-cos<p.
(69)
Отношение
у _ PG ,
Н OP
С помощью ОВС фактические координаты цели хну
измеряются следующим образом В преобразователь ко-
ординат (рис. 151),
представляющий вы-
числительное устройст-
во, вводятся значение
высоты И ц значения
координат х и у. По-
следние подбирают так,
чтобы визирная ли-
ния была направле-
на на цель (перекре-
стие ОВС наложено на
цель). При совмеще-
нии перекрестия ОВС
с целью значения ко-
ординат хит/, уста-
новленные на входе
преобразователя, бу-
дут равны значениям
фактических координат
цели.
В преобразователь
координат можно вво-
у, а их отношение к вы-
не значения координат х
т. е. значения х!Н и у]Н. В этом случае при нало-
и
дить
соте,
жении перекрестия ОВС на цель будет измерена вели-
чина этих отношений.
С помощью радиолокационной визирной системы
(РВС) можно измерить две координаты: дальность до
цели d и ее курсовой угол ф (рис. 152). Последний от-
считывается от плоскости курса самолета. Угол, отсчи-
210
тайный вправо, считают положительным, а влево —
отрицательным.
Координаты d и ф измеряются следующим образом.
На индикаторе РВС создается перекрестие, образован-
Рис. 152. Координаты, измеряемые РВС
ное пересечением курсовой черты с поперечной меткой
(рис. 153), и светящаяся отметка Е' целй Е. На соот-
ветствующие блоки
РВС подаются напря-
жения, пропорциональ-
ные дальности d и кур-
совому углу ф. При из-
менении напряжения
пропорционально даль-
ности d отметка цели
па индикаторе переме-
щается вдоль курсовой
черты, £ пропорцио-
нально курсовому углу
ф — вдоль поперечной
метки.
Выведем формулы, связывающие фактические коор-
динаты цели х и у с координатами d и ф, измеряемы-
ми РВС.
241
Из рис. 152 видно, что
— «) =-7-;
(70)
d = У Н2 + х2 + у2.
Формулы (70) можно преобразовать и несколько
упростить. Обычно значение координаты у невелико.
Поэтому им можно пренебречь, считая его приблизи-
тельно равным нулю. Тогда
d = VH2 + x2.
Если Н вынести из-под знака радикала (корня), по-
лучим
Но так как -*- = tg<p, то
d = НУ 1 + tg2 <f.
Поделив теперь в первой формуле (70) числитель и
знаменатель на высоту Н, получим
Имея в виду, что -jy- = tgp0; ~^- = tg<p и, кроме того,
1 + tg2 Т—sec2 получим
(71)
d = H sec <р.
Измерение фактических координат цели х и у с по-
мощью РВС выполняется так же, как и с помощью
ОВС, поэтому схема для измерения фактических коор-
динат цели (рис. 154) подобна схеме, приведенной на
рис. 151.
В преобразователь координат вводятся значение вы-
соты Н и значения координат d и ф. Изменяя их вели-
чины на входе преобразователя, стремятся совместить
отметку цели с перекрестием индикатора. При совме-
щенной отметке цели с перекрестием индикатора вве-
242
денные в преобразователь значения х и у будут равны
фактическим координатам цели.
Преобразователь координат можно построить так,
чтобы он обеспечивал вычисление как координат <р и р,
измеряемых ОВС, так и координат d и ф, измеряемых
РВС. Тогда при изменении значений координат х и у
(или значений отношений = и -^-=tgpo) на входе
Рис. 154. Схема управления РВС
Рис. 155. Схема совместного
применения ОВС и РВС
преобразователя будет обеспечено одновременное управ-
ление как оптической, так и радиолокационной визир-
ными системами (рис. 155). В такой схеме в преобра-
зователь вводятся значения отношений х/Я и у)Н. Вы-
числения в преобразователе выполняются по формулам
(69) и (71). По формулам (69) определяется значение
углов <р и р:
<F = arc
P==arctg( cos<p
243
На эти же углы поворачиваются призмы оптической
системы прицела.
По формулам (71) вычисляется дальность d и кур-
совой угол цели
ф = а + arc tg (.
Т 6\tg<p/
Если, изменяя значения отношений х/Н и у/Н ha
входе преобразователя, наложить перекрестие ОВС на
цель, то отметка цели на индикаторе РВС также совме-
стится с перекрестием. И наоборот, при совмещении от-
метки цели на индикаторе РВС с его перекрестием пе-
рекрестие ОВС будет наложено на цель. Это позволяет
в зависимости от обстановки использовать или оптиче-
скую, или радиолокационную визирную систему.
§ 42. СЧИСЛЕНИЕ КООРДИНАТ
Счисление пути или счисление координат состоит в
том, чго по известной путевой скорости W находятся
пройденный самолетом путь и соответствующие ему из-
менения фактических координат' цели за произвольное
время t.
Поясним, как решается задача счисления координат
с помощью фрикционного механизма.
Фрикционный механизм (рис. 156) состоит из ди-
ска 1 и ролика 2, опирающегося в точке а на диск.
Точка касания ролика с диском смещена на величину р
относительно центра диска. Это смещение можно изме-
нять с помощью поводка 3.
Положим, что диск / вращается с постоянной угло-
вой скоростью и>]. Найдем угловую скорость од, с кото-
рой вращается ролик.
Точка а диска, в которой ролик касается его, имеет
линейную скорость с;1=ра>1. Линейная скорость точки на
внешней окружности ролика 2
^2=^2,
где г—радиус ролика.
Будем считать, что фрикционный механизм работает
без проскальзывания, т. е. ролик 2 не проскальзывает
относительно диска 1. Тогда линейные скорости диска и
241
ролика в точке касания а будут одинаковы, т. е. »2=fi.
Следовательно:
откуда
го>2 = ро>1(
“2= — Р-
(72)
Установим теперь значение р пропорциональным ве-
личине путевой скорости W, т. е. пусть p=m1U^, еде
tiii — масштабный коэффициент. Тогда
Рис. 156. Схема фрикционного механизма для
счисления координат:
/ диск; 2 — ролик; 3 поводок
Приняв
получим
ш.
-~mi =т2,
<о2 = m2U7
(73)
где «2 — постоянная величина.
Как видим, угловая скорость ролика 2 пропорцио-
нальна путевой скорости IV', а угол О, на который ро-
245
лик повернется за время t, пропорционален изменению
координаты х за это время:
& —80 =/и2 (х — х0), (74)
где 80 и Хо — значения угла 8 и координаты х в началь-
ный момент времени.
Следовательно, по углу поворота ролика фрикцион-
ного механизма можно определить изменение коорди-
наты х за время t.
Значение р можно установить пропорциональным от-
ношению WjH, т. е. передвинуть ролик так, чтобы
W
р = .
В этом случае vr u>2 — т2 уу , (75)
а 8—80 = т2 (7^- — Хр \ Н ) ’ (76)
или 8 — 80 = т2 (tg <р — tg<Po)- (77)
Свяжем ролик фрикционного механизма, обеспечи-
вающего счисление одной из координат, с входным зве-
ном преобразователя координат (рис. 157). При враше-
, х
нии ролика будет изменяться величина отношения =
= tg<p, вводимое в преобразователь координат. Началь-
ное значение величины =tg <р0 устанавливается руч-
кой через дифференциал.
Данную схему называют схемой программного со-
провождения цели и пользуются ею следующим обра-
зом. В начальный момент перекрестия ОВС. и индика-
тора РВС с помощью рукояток, показанных на схеме,
совмещают с целью и ее отметкой на индикаторе.
В дальнейшем вводимое в преобразователь отноше-
ние х/Н автоматически изменяется в результате работы
механизма счисления координат. При этом перекрестия
ОВС и индикатора РВС все время следят за целью.
Как говорят, будет обеспечено программное сопрово-
246
ждение цели оптической и радиолокационной визир-
ными системами по осн х. Такое сопровождение значи-
тельно облегчает наблюдение за целью во время прице-
ливания.
Рис. 157. Схема совместного применения ОВС,
РВС и счисления координат
§ 43. ИЗМЕРЕНИЕ ПУТЕВОЙ СКОРОСТИ
Чтобы обеспечить счисление координат, необходимо
иметь данные о путевой скорости. Эти данные нужны
также и для вычисления требуемых координат.
Современные прицелы позволяют измерить путевую
скорость двумя способами: синхронным и векторным.
Синхронный способ измерения путевой скоро-
сти применяется, если в приц'еле есть схемы программ-
ного сопровождения цели Заключается он в следую-
щем. Во фрикционном механизме (рис. 156) смещением
ролика, т. е. изменением величины р, устанавливают
произвольное значение путевой скорости W, Затем
247
с помощью рукояток перекрестия ОВС и индикатора
РВС совмещаются с целью.
Если значение путевой скорости W введено непра-
вильно, то цель будет постепенно отклоняться от пере-
крестий или, как говорят, сползать с перекрестий. Об-
наружив уход цели с перекрестия, штурман сводит по-
правку в смещение р ролика и снова с помощью рукоя-
ток накладывает перекрестия на цель. Повторив эту
Рис. 158. К решению на-
вигационного треуголь-
ника скоростей
операцию два-три раза, практи-
чески удается устранить сполза-
ние цели с перекрестий, т. е. до-
биться, чтобы движение перекре-
стий и цели было синхронизиро-
вано. Поэтому фрикционный ме-
ханизм, применяемый для счис-
ления координат этим методом,
называют механизмом синхрони-
зации.
При синхронном движении
цели и перекрестий введенное во
фрикционный механизм значе-
ние путевой скорости W будет
равно его истинному значению.
Оно пропорционально величине
смещения р ролика фрикцион-
ного механизма
Векторный способ опре-
деления путевой скорости основан на решении навига-
ционного треугольника скоростей.
Если известны величина и направление вектора воз-
душной скорости V и величина и направление вектора
скорости ветра U, то из навигационного треугольника
скоростей (рис. 158) можно определить путевую ско-
рость самолета. Обычно находят или проекции вектора
путевой скорости W на оси X и У, или величину (мо-
дуль) IV7 этого вектора и угол сноса а. Для упрощения
решения обычно определяют приближенное значение
модуля путевой скорости.. Угол сноса вычисляют, ис-
пользуя найденное значение модуля путевой скорости.
По теории синусов для треугольника OMN (рис. 158):
sin а =
U sin е
(78)
948
Для определения путевой скорости векторным спо-
собом необходимо знать скорость ветра. В современных
прицелах предусматривается измерение скорости ветра
в полете тем или иным способом. Один из способов из-
мерения ветра, примененный в прицеле ОПБ-11, рассмо-
трен в главе VIII
§ 44. ВЫПОЛНЕНИЕ ПРИЦЕЛИВАНИЯ
Положение самолета в момент сбрасывания, при ко-
тором сброшенная с заданной высоты бомба попадет в
цель, не является един-
ственным. Например,
если нет ветра, бомбу
можно сбросить в
любой точке, находя-
щейся на окружности
(рис. 159). В данном
случае центр Со совпа-
дает с целью, а радиус
равен штилевому го-
ризонтальному относу
^огор- При этом в мо-
мент сбрасывания бом-
бы должно быть выпол-
нено единственное ус-
ловие: плоскость курса
самолета должна про-
ходить через цель (че-
рез центр окружности
Со). Действительно, штилевой относ бомбы не зависит от
направления захода на цель Поэтому бомба, сброшенная
в любой точке указанной окружности, попадет в точ-
ку Со. Окружность, на которой должен находиться само-
лет в момент сбрасывания бомбы, называют окруж-
ностью сбрасывания.
При ветре сброшенная бомба независимо от направ-
ления захода на цель будет дополнительно снесена па
величину C0C=UT. Поэтому все бомбы, сброшенные в
любой точке окружности сбрасывания, попадут в точ-
ку С. Цель будет поражена, если опа будет также на-
ходиться в этой точке.
249
Как было установлено выше, точка падения бомбы
отклоняется от плоскости пути на боковое смещение
d = Asina. Поэтому плоскость пути самолета в момент
сбрасывания бомбы должна проходить на расстоянии
Asina от цели.
Задачу прицеливания разделяют на две части: при-
целивание по направлению (или боковую наводку) и
прицеливание по дальности.
Прицеливание по направлению состоит в том, чтобы
при выходе самолета на цель плоскость его пути про-
шла на расстоянии Asina от цели.
Задача прицеливания по дальности состоит в том,
чтобы определить момент сбрасывания бомбы, совпа-
дающий с моментом пересечения самолетом окружности
сбрасывания.
Для решения задачи прицеливания в прицеле выра-
батываются два параметра: параметр управления q и
параметр сигнализации р.
Параметр управления
<1=У-У (79)
и используется для прицеливания по направлению.
Параметр сигнализации
р = х—Х (80)
и используется для прицеливания по дальности
Прицеливание по направлению будет выполнено,
если 9 = 0. Действительно, при q=0 фактическая коор-
дината цели у будет равна требуемой координате У =
= Asina — формулы (66) — (68). Поэтому плоскость
пути самолета пройдет от цели на расстоянии Asina,
так как ось X направлена по вектору путевой скоро-
сти W и, следовательно, лежит в плоскости пути само-
лета.
Для выполнения прицеливания по направлению па-
раметр управления q подается на автопилот. При q=0
автопилот обеспечивает движение самолета с постоян-
ным курсом. Если q =/= 0, автопилот воздействует на
рули самолета, и курс начинает изменяться так, чтобы
значение q приближалось к нулю.
Прицеливание по дальности будет выполнено, если
р 0, так как при этом фактическая координата цели х
250
равна требуемой координате X. В прицеле при р = 0
замыкаются контакты, включающие ЭСЕР.
Параметры управления и сигнализации можно зада-
вать и в другом виде. Так, например, можно поделить
равенство (80) на высоту Н и получить следующее вы-
ражение для параметра сигнализации:
Рис. 160. Угол визирования и угол прицеливания
ИЛИ
= — tg?n, (81)
где <р — фактический угол визирования (рис. 160);
<рп — требуемый угол визирования (или угол при-
целивания).
Можно задать в другом виде и параметр управ-
ления q.
§ 45. ОСНОВНЫЕ ПОНЯТИЯ О БОМБОМЕТАНИИ
С НЕГОРИЗОНТАЛЬНОГО ПОЛЕТА
Бомбометание с иегоризонталыюго полета может .
выполняться с пикирования, на выходе из пикирования
и с кабрирования (рис. 161).
251
Прицельная схема для бомбометания с пики-
рования может быть получена следующим образом.
В общем случае при ветре точка С падения бомбы
(рис. 162), сброшенной во время пикирования в точ-
ке О, отклонится от плоскости курса самолета. Поло-
Пикирование
Кабрирование
Выход из пикирования
Рис. 161. Пикирование, выход из пикирования и
кабрирования
жение точки падения бомбы относительно точки сбра-
сывания определяют двумя углами: углом упреждения ₽
и углом наклона визирной линии р. Первый отсчиты-
Рис. 162. Прицельная схема при бомбометании
с пикирования
вается от продольной оси самолета в плоскости его сим-
метрии, а второй — от плоскости симметрии самолета
до визирной линии ОС. Углы р и р являются требуе-
мыми координатами цели. Их значения зависят от вы-
соты сбрасывания Н, угла пикирования X, воздушной
252
скорости
бомбы.
V, скорости ветра и
баллистических свойств
Углы р и р. вычисляются в прицеле во время пики-
рования, для чего в прицел автоматически вводятся
значения высоты,, угла пикирования и воздушной скоро-
сти. Кроме того, вручную устанавливаются значения
скорости и направления ветра, а также характеристи-
ческого времени бомбы. Вычисленные значения углов р
и р. передаются на кол-
лиматорный визир лет-
чика. В результате это-
го перекрестие колли-
маторного визира от-
клоняется от оси сим-
метрии самолета на
углы р и р. Задача лет-
чика при прицелива-
нии состоит в том, что-
бы наложить перекре-
стие коллиматорного
визира на цель. Бомба
сбрасывается, если цель
совмещена с перекре-
стием, в произвольный
момент времени.
При бомбометании
с пикирования дости-
гается более высокая
Рис. 163. Прицельная схема при бом-
бометании на выходе из пикирования
точность, чем при бом-
бометании с горизонтального 'полета. Но конструкция
самолета ограничивает возможность установки угла
упреждения р до определенной величины. При боль-
ших углах упреждения цель закрывается носовой
частью самолета и прицеливание становится невоз-
можным
При бомбометании на выходе из пикирова-
ния устанавливается постоянный угол упреждения,
равный нулю (рис. 163). Благодаря этому устраняются
недостатки, свойственные бомбометанию с пикирования.
Однако бомба, сброшенная на участке пикирования при
угле упреждения, равном нулю, упадет с недолетом.
Чтобы попасть в цель, ее необходимо сбросить па уча-
стке выхода из пикирования в точке О.
253
Для определения момента сбрасывания бомбы фик-
сируют положение данной цели относительно само-
лета в начале выхода из пикирования (в точке О0).
Момент сбрасывания определяется или по выдержке
времени, прошедшего после начала выхода из пикирова-
ния, или по изменению угла пикирования. Момент сбра-
сывания можно также определить на основании равен-
ства
Р = х — Ах.
Бомба должна быть сброшена при р = 0.
Рис. 164. Схема бомбометания с кабрирования
при угле кабрирования, меньшем 90°
При бомбометании с кабрирования воз-
можен подход к цели на малой высоте. Этим обеспечи-
вается внезапность удара и облегчается преодоление
средств ПВО. Кроме того, при бомбометании с кабри-
рования можно применять бомбы с мощными зарядами,
не опасаясь, что при взрыве будет поражен самолет,
наносящий удар.
При бомбометании с кабрирования бомба может
сбрасываться при углах кабрирования, величина кото-
рых меньше или больше 90° (рис. 164, 165).
В том случае, когда угол X меньше 90°, кабрирова-
ние начинается в точке О0 на значительном (до несколь-
ких километров) удалении от цели Е, и она, как
правило, не будет видна. Поэтому для определения мо-
мента перехода в кабрирование используется вспомога-
тельный ориентир F, положение которого относительно
цели Е должно быть известно. Бомба сбрасывается в
254
тот момент, когда угол X достигает расчетного значе-
ния. Момент сбрасывания определяется или по показа-
ниям авиагоризонта, или по выдержке времени. Воз-
можно и автоматическое определение момента сбрасы-
вания с помощью специального прицела.
Рис. lf>5. Схема бомбометания с кабри-
рования при угле кабрирования, боль-
шем 90°
При бомбометании с кабрирования, когда угол X
больше 90°, самолет переводится в кабрирование над
целью Е. Благодаря этому бомбометание можно выпол-
нять по целям, положение которых экипажу заранее не
было известно. ,
255
ГЛАВА VIII
ПРИЦЕЛЫ ДЛЯ БОМБОМЕТАНИЯ
С ГОРИЗОНТАЛЬНОГО ПОЛЕТА
§ 46. ОБЩИЕ СВЕДЕНИЯ
В настоящее время на вооружении имеется несколь-
ко типов бомбардировочных прицелов. В Учебнике
дается описание одного из них — прицела ОПБ-11
(рис. 166).
Оптический бомбардировочный прицел ОПБ-11
предназначен для бомбометания с горизонтального по-
лета по неподвижным и движущимся целям. Фактиче-
ские координаты цели измеряются с помощью оптиче-
ской или радиолокационной визирной системы. В каче-
стве основной системы отсчета выбрана прямоугольная
система координат XYZ, ось X которой направлена по
вектору путевой скорости W. Основными измеряемыми
координатами при этом являются:
tg р = -g- cos ср;
Схема связи дает возможность переходить от коор-
динат, измеренных РВС, к координатам, измеряемым
ОВС. При этом порядок работы штурмана при бомбо-
метании не зависит от типа используемого измерителя
фактических координат цели.
Существуют два варианта прицела ОПБ-11:
ОПБ-11Р и ОПБ-11П. Первый сочленяется с радиоло-
кационной станцией типа «Рубидий» и образует прицел
251 >
к РУ
головка прицела; 2 — решающий прибор; 3 — датчик высоты; 4 — датчик воздушной скорости; 5 — коробка управления;
о — блок электронных реле; / — преобразователь тока; 8 — высотный блок; 9 — пульт бомбардира
9-320
257
с общим наименованием РБП-4. Второй совместно с ра-
диолокационной станцией типа ПСБН называется
РБП-3.
Путевая скорость может определяться или вектор-
ным, или синхронным способом. Скорость ветра опреде-
ляется способом штилевой синхронизации.
Высота полета, воздушная скорость и курс самолета
в счетно-решающее устройство прицела вводятся авто-
матически, остальные исходные данные (характеристи-
ческое время бомбы, величина и направление ветра, по-
правка на серию и строй и некоторые другие) вводятся
вручную.
Прицел обеспечивает измерение фактических коор-
динат и автоматическое вычисление требуемых коорди-
нат. При выполнении прицеливания он формирует па-
раметр управления q и параметр сигнализации р.
Прицел ОПБ-11Р конструктивно отличается от
ОПБ-ПП только устройством высотного блока и неко-
торых элементов схем связи, поэтому ниже будет изло-
жено устройство только прицела ОПБ-11Р.
Современный бомбардировочный прицел можно рас-
сматривать как одну из основных составных частей са-
молетной навигационно-бомбардировочной системы
(НБС), предназначенной для решения задач навигации
и бомбометания.
§ 47. ОПРЕДЕЛЕНИЕ ФАКТИЧЕСКИХ КООРДИНАТ ЦЕЛИ
Фактические координаты цели измеряются в прицеле
с помощью оптической или радиолокационной визирной
системы. Прицел позволяет также производить счисле-
ние одной из координат (координаты х).
Оптическая визирная система (рис. 167)
дает возможность измерить основные координаты tgp.
и tg<p. Ее призменный узел состоит из двух куб-призм:
нижней 2— визирной, так как при ее повороте изме-
няется угол визирования, и верхней 3 — призмы накло-
на. При повороте последней происходит изменение угла
наклона визирной линии.
Объектив 4, состоящий из двух линз, совместно с
призменным узлом обеспечивает получение прямого
изображения наблюдаемых объектов. В фокальной пло-
скости объектива помещены две сетки 7. Нижняя непо-
258
движная сетка имеет перекрестие и шкалу углов визи-
рования. Два подвижных индекса (петелька и тре-
угольник) используются для отсчета углов визирования
и прицеливания. Верхняя подвижная сетка предназна-
чена для измерения ветра. Величина ветра отсчиты-
вается по шкале сетки, а курсовой угол — по шкале кре-
мальеры, имеющей кинематическую связь с сеткой.
Рис. 167. Схема оптики:
Шкала для измерения
ветра
Шкала углов
визирования
и прицепивания
7 — защитное стекло; 2—визирная призма; 3—призма на-
клона; 4— объектив; 5 — башмачная призма; 6 — диск со све-
тофильтрами; 7 — сетка; 8 — окуляр
Окуляр 8 позволяет одновременно рассматривать
изображение объектов, обе сетки и подвижные ин-
дексы.
Башмачная призма 5 изменяет направление оптиче-
ской оси. Это обеспечивает более удобную работу с
прицелом.
Между сеткой и объективом находится диск 6 со све-
тофильтрами, Они увеличивают контрастность наблю-
даемых объектов.
Под призменным узлом расположенд защитное стек-
9*
259
ло /, предохраняющее механизмы прицела от загряз-
нения.
Радиолокационная визирная система
дает возможность измерить наклонную дальность до
цели d и курсовой угол ф.
Для измерения координат цели (ориентира) необхо-
димо совместить ее изображение на индикаторе с пере-
крестием. Перекрестие образуется пересечением про-
дольной метки, нанесенной
на светофильтре механиче-
ским способом (рис. 168),
с поперечной чертой инди-
катора.
ности на индикаторе:
I — линия развертки; 2 — попереч-
ная черта; 3 — метка визирования;
4 — черта светофильтра (курсовая)
§ 48. СВЯЗЬ ОПТИЧЕСКОЙ
И РАДИОЛОКАЦИОННОЙ
ВИЗИРНЫХ СИСТЕМ
Фактические координаты
цели tg ср и tgp., измеряе-
мые оптической визирной
системой, связаны с коор-
динатами d и ф, измеряемы-
ми радиолокационной ви-
зирной системой, посредст-
вом формул (71).
Углы ф— а и р0 практи-
чески невелики. Поэтому в
{&(Ф — «) и tgp0 приближен-
но заменены значениями углов (ф —а) и р0. При такой
замене приведенные выше формулы примут следующий
вид:
прицеле ОПБ-11 значения
ф = а +
т tg <f ’
d — H sec <p.
(82)
Решение этих формул осуществляется схемами свя-
зи. Схема, решающая первую зависимость, называется
схемой связи по направлению, а схема, решающая вто-
рую формулу,— схемой связи по дальности.
Схема связи по направлению (рис. 169) работает
следующим образом.
Щетка потенциометра /7(а)рвс сдвигается на вели-
чину, пропорциональную углу сноса а. При этом с по-
260
тенциометра /7(я)рвс и делителя напряжения /?3, /?<
снимается напряжение, пропорциональное а, которое
подается на индукционную катушку L2, расположенную
в индикаторе.
Напряжение, пропорциональное отношению рю/tg<р,
вырабатывается схемой, состоящей из потенциометров
Z7(tg<p), П(р0) и делителя напряжения R\, R2. Щетка
Рис. 169. Схема учета угла сноса и бокс*
вого относа бомбы (схема связи по на-
правлению)
первого потенциометра сдвигается на величину, пропор-
циональную tg<p, второго — на величину, пропорцио-
нальную р0. Выработанное схемой напряжение подается
на индукционную катушку Ц, находящуюся в индика-
торе.
Схема связи по дальности (рис. 170) включает по-
тенциометры /7(//)рвс и /7('sec<p), соединенные по схе-
ме умножения. Они находятся соответственно в решаю-
щем приборе и в головке прицела. Их щетки от соот-
261
ветствующих кинематических цепей поворачиваются на
углы, пропорциональные значениям 11 и sec<p. С выхода
схемы снимается напряжение Ud, пропорциональное на-
—п Vv клонн'ой дальности d, которое
и подается в радиолокациоп-
Рис. 170. Схема связи по
дальности
ную визирную систему.
§ 49. УПРАВЛЕНИЕ
ВИЗИРНЫМИ СИСТЕМАМИ
При измерении фактиче-
ских координат цели необхо-
димо наложить на цель пере-
крестие оптической или радио-
локационной визирной систе-
мы. Когда эти системы свя-
заны между собой, при нало-
жении на цель перекрестия
ОВС перекрестие индикатора РВС совмещается с изо-
бражением цели на индикаторе. Поэтому достаточно
рассмотреть, как обеспечивается управление оптической
визирной системой.
Наложение перекрестия ОВС на цель достигается
поворотом призм призменного узла с помощью соответ-
ствующих рукояток и механизмов. Призма наклона не
имеет специальной рукоятки для поворота ее вручную.
Она связана с механизмом, вычисляющим требуемый
угол наклона визирной линии. Поэтому курсовая черта
сетки прицела отмечает требуемое положение цели от-
носительно плоскости боевого курса. Фактическое зна-
чение угла р можно оценить глазомерно по величине
смещения цели относительно курсовой черты. Совмеще-
ние цели с курсовой чертой осуществляется при выпол-
нении прицеливания по направлению.
Призма визирования может поворачиваться как
вручную, так и от фрикционного механизма синхрони-
зации, применяемого для счисления координаты х. В по-
следнем случае обеспечивается программное сопрово-
ждение цели по оси X.
Для того чтобы наклонить визирную линию на
углы [л и ф, необходимо повернуть соответствующие
призмы на углы р/2 и <р/2.
Призма визирования 11 (рис. 171), закрепленная на
262
оси солнечного колеса 3, кинематически связана с ва-
ликом 13 (рис. 172). Кинематическая цепь включает
сателлиты 4, солнечное колесо 3, рейку 6 (рис. 171),
каретку 16 (рис. 172), коромысло 15 и кулачок 14, за-
крепленный на валике 13. Профиль кулачка выполнен
по закону arctgcp. Поэтому он преобразует значение
tg ср, задаваемое поворотом валика, в угол <р. Следова-
тельно, звенья кинематической цепи от коромысла до
призмы визирования перемещаются пропорционально
Рис. 171. Призменный узел с гировертикалью?
/ — щетка потенциометра; 2—призма наклона; 3 н 5 —солнечные колеса;
4 — сателлиты; 6 — рейка; 7 — тяга; в—внутренняя рама; 9 — внешняя рама;
10 — водило; 11 призма визирования; 12 -s— тяга
Вращать валик можно или только вручную с по-
мощью рукоятки визирования 9, или с помощью фрик-
ционного механизма синхронизации и той же рукоятки
визирования. Для поворота валика вручную необходимо
оттянуть кнопку 8 рукоятки визирования. При этом ки-
нематическая цепь замыкается через шестерню 10 и
водило дифференциала 12. Кинематическая же цепь от
фрикционного механизма будет разорвана. Для пово-
263
рота валика от фрикционного механизма кнопка
должна быть утоплена. Тогда кинематическая цепь за-
мыкается через ролик 6, правое солнечное колесо и во-
дило дифференциала. Одновременно кинематическая
цепь от рукоятки визирования будет также замкнута
через шестерню 11 и левое солнечное колесо. Это дает
возможность в любой момент при счислении координа-
ты tg ср осуществить ее коррекцию. Для этого достаточ-
Рис. 172. Механизм управления визирными системами;
1 — шкала для установки начального угла визирования; 2 — коромысло; 3, 7
и 14 — кулачки; 4 — коромысло; 5 — диск; 6 — ролик; 8 — кнопка; 9 — рукоятка
визирования; 10, 11 — шестерни; 12 — дифференциал; 13 — валик; 15 — коро-
мысло; 16 — каретка
но рукояткой визирования наложить поперечную черту
сетки на цель.
Ролик 6 относительно центра фрикционного диска 5
смещается на величину, пропорциональную W/H (см.
§42), автоматически или вручную при прицеливании.
Потенциометры /7(tgcp) и П(sec ср), входящие в схе-
мы связи, кинематически соединены с валом соответст-
264
венно через кулачки 7, 3 и коромысла 2, 4. Поэтому
щетки этих потенциометров поворачиваются на углы,
пропорциональные tg ср и sec ср.
§ 50. СТАБИЛИЗАЦИЯ СИСТЕМ ОТСЧЕТА
Способы измерения фактических координат цели в
гл. VII были даны в предположении, что самолет не
имеет колебаний вокруг центра масс. При колебаниях
самолета в измерении их возникают ошибки, для устра-
нения которых необходимо стабилизировать визирную
линию ОВС и изображение цели на экране индикатора
РВС.
Рис. 173. Схема стабилизации системы отсчета
Стабилизация визирной линии в пространстве при
колебаниях самолета осуществляется следующим обра-
зом (рис. 173). Головка прицела с помощью стабили-
затора курса стабилизируется по вертикальной оси Z.
С помощью гировертикали осуществляется стабилиза-
ция визирной линии по осям X и У путем дополнитель-
ного поворота призм. Для этого призма визирования 11
(рис. 171) через водило дифференциала и тягу 7 кине-
матически соединена с внутренней рамой 8 гироверти-
кали. Призма наклона через водило дифференциала и
тягу 12 кинематически соединена с внешней рамой 9.
При повороте самолета вокруг оси У на угол
внешняя рама 9 повернется вместе с самолетом, а вну-
тренняя 8 сохранит свое положение в пространстве. Са-
теллитная шестерня 4, обкатываясь вокруг солнечного
колеса 5, вызовет поворот призмы (через другую са-
теллитную шестерню и солнечное колесо 3) в обратном
направлении на величину 8у/2.
При крене самолета па угол 0.» внешняя рама гиро-
вертикали наклонится относительно самолета на этот
же угол. На аналогичный угол повернется водило 10
265
дифференциала. Вращение водила через сателлитные
шестерни и левое солнечное колесо дифференциала бу-
дет передано на призму наклона 2, и она повернется
в обратном направлении на угол Эх/2. Призма визиро-
вания оказывается стабилизированной, так как она за-
креплена в наружной раме.
Стабилизация изображения цели на экране индика-
тора осуществляется с помощью схемы связи по на-
правлению. Для этого щетка 1 (рис. 171) потенцио-
метра /7(ро) закреплена на внешней раме гироверти-
кали, а корпус потенциометра кинематически связан с
механизмом выработки угла ро. Поэтому щётка потен-
циометра относительно его корпуса всегда будет повер-
нута на сумму углов р0 + 8.т-
Благодаря этому обеспечивается стабилизация изо-
бражения при колебаниях самолета вокруг оси X. Ко-
лебания самолета вокруг оси Y влияния на изображе-
ние цели на индикаторе радиолокационной визирной
системы практически не оказывают.
§ 51. ОПРЕДЕЛЕНИЕ И ВВОД ИСХОДНЫХ ДАННЫХ
ДЛЯ ВЫЧИСЛЕНИЯ ТРЕБУЕМЫХ КООРДИНАТ ЦЕЛИ
Для вычисления требуемых координат в прицел не-
обходимо вводить такие исходные данные, как высоту
и скорость полета, величину и направление ветра, курс
самолета и т. д.
Высота и скорость поступают в прицел от датчиков
ДВ-15 и ДС-1200 в виде приборных значений высоты
и скорости, соответствующих условиям стандартной ат-
мосферы. Истинные значения этих величин вычисля-
ются по приближенным формулам с помощью электри-
ческих счетно-решающих схем.
Датчиком курса самолета является компас. Ветер
измеряется, как отмечалось ранее, методом штилевой
синхронизации. После измерения он вводится в прицел
вручную.
Вычисление высоты. Истинная высота бом-
бометания вычисляется по формуле
77(288 — 0,00325/7) = /7прТср, (83)
где /7пр —приборное значение высоты, выда-
ваемое датчиком;
2G6
т + т
Тср = 2 —средняя температура воздушного
слоя;
288 — 0,00325Н — температура на высоте Н для стан-
дартной атмосферы;
Тв и Тн — температура воздуха соответствен-
но у земли и на высоте Н.
Решение формулы (83) осуществляется схемой, пред
ставленной на рис. 174. Она имеет потенциометры
77(/7пр), П(Тср), включенные по схеме умножения, и
Рис. 174. Схема вычисления высоты
функциональный потенциометр П (Н). Потенциометр
П (finp) расположен е датчике высоты, остальные потен-
циометры находятся в решающем приборе. Щетка по-
тенциометра П(Тср) кинематически соединена через
дифференциал с рукоятками установки Т3 и Тн. Щетка
потенциометра П(Н) приводится в движение электро-
магнитной муфтой ЭМ, управляемой от электронного
реле РЭ, при этом перемещение щетки пропорциональ
но высоте Н.
Отработанное значение высоты по соответствующим
кинематическим цепям (рис. 175) передается на потен-
циометры /7 (Гн ст) и П (Н) рве, шкалу высоты 1 и че-
рез червяк в механизм, вычисляющий время Т падения
бомбы и отношение Д//7.
Потенциометр /7(7^ ст) используется в схеме вы-
числения истинной воздушной скорости, а потенциометр
77(/7)рвс — ® схеме связи по дальности.
267
Высота по формуле (83) вычисляется относительно
уровня моря. При определении фактических и расчет-
ных координат цели должна быть использована высота,
отсчитанная относительно уровня цели. Поэтому в при-
цел с помощью рукоятки «Д/7» 4 через дифференциал 3
предварительно вводится так называемое превышение
цели А//. Отсчет его производится по шкале 5.
Рис. 175. Механизм отработки высоты?
7 — шкала: 2 — червяк; 3 — дифференциал; 4 — рукоятка; 5 — шкала
Рукоятка 4 может быть использована также для руч-
ного ввода высоты бомбометания в решающий прибор
прицела. Отсчет введенной высоты производится по
шкале 1.
Вычисление истинной воздушной ско<
рости. Истинная воздушная скорость вычисляется по
формуле
avjkt;. (84)
где Ипр — скорость, выдаваемая датчиком;
—0,0065/7 — температура на высоте Н
для стандартной атмосферы;
2G8
AVa— аэродинамическая поправка, учитывающая
погрешности приемника давления.
Формула (84) решается электросхемой, изображен-
ной на рис. 176. Потенциометры /7(УПр) и /7(Д Va)
включены по схеме суммирования. К этим потенциоме-
трам по схеме умножения подключен потенциометр
/7 (J/7'//cT ). Принимающий потенциометр П(У) и функ-
циональный П (J^TНст ) включены также по схеме
умножения.
Рис. 176. Схема вычислителя воздушной скорости
При равновесном состоянии схемы щетка потенцио-
метра П(У) будет повернута на угол, пропорциональ-
ный значению истинной воздушной скорости, которое
будет передано на шкалу 1 (рис. 177) и в механизмы,
вычисляющие путевую скорость и угол сноса (звено 5),
а также баллистическую функцию Д/7/ (звено 4).
Потенциометр //(ДГа) имеет две щетки, при переме-
щении которых сохраняется постоянная величина со-
противления между ними. Это дает возможность к на-
пряжению, снимаемому с потенциометра 7/(1/пр), при-
бавить напряжение, снимаемое с потенциометра/7(ДУа),
т. е. сложить величины 1'пр и AVZU (рис. 178).
269
Рис. 177. Механизм отработки воздушной скорости:
1 — шкала; 2 — дифференциал; 3 и 4 — звенья; 5 г— рукоятка
Рис. 178. Схема сложения напряжений
270
При отказе электросхемы истинную воздушную ско-
рость можно ввести вручную рукояткой 5 (рис. 177)
через дифференциал 2. Отсчет скорости производится
по шкале 1.
Ввод курса. Между направлением ветра 3, кур-
сом самолета К и курсовым углом ветра е существует
зависимость (64). Поскольку направление ветра при-
нято постоянным, то изменение курсового угла ветра
равно по величине изменению курса, т. е.
Де = —ДК.
(85)
Следовательно, для стабилизации вектора ветра в
прицел необходимо вводить курс самолета. Начальное
Рис. 179. Круговая следящая система
значение курсового угла ветра на решающем приборе
устанавливается вручную. Курс самолета сводится с по-
мощью следящей системы (рис. 179). Потенциометр-
датчик расположен в компасе, а потенциометр-прием-
ник— в решающем приборе. Каждый потенциометр
имеет замкнутую круговую обмотку и две изолирован-
ные щетки. Щетки потенциометра-датчика, кинемати-
чески соединенные с подвижной системой компаса, под-
ключены к источнику тока 27 в. Обмотки потенциоме-
тров соединены между собой тремя проводами.
Благодаря этому напряжения на обеих обмотках рас-
пределены одинаково. Щетка потенциометра приемника
кинематически соединена с электромагнитной муфтой
ЭМ. управляемой электронным реле РЭ.
Если щетки принимающего потенциометра располо-
жены перпендикулярно осп симметрии диаграммы
27'1
напряжений, то схема находится в равновесном состоя-
нии. При повороте щеток потенциометра-датчика на
угол 'ХК происходит поворот диаграмм напряжений, а сле-
довательно, и щеток потенциометра-приемника на этот
же угол. Отработанное значение курса поступает в ме-
ханизм, вычисляющий путевую скорость и угол сноса.
Измерение ветра осуществляется методом шти-
левой сихронизации. Сущность его состоит в следую-
щем.
На решающем приборе устанавливается скорость
ветра, равная нулю. При этом ведомый ролик меха-
низма синхронизации
смещается относитель-
но центра диска на
величину, пропорцио-
нальную воздушной
скорости V. Под углом
визирования <р0 вклю-
чается программное со-
провождение цели, по-
сле чего начинает вы-
числяться фактическая
координата цели для
данной высоты полета
и воздушной скорости.
Если ветра нет, то пе-
рекрестие сетки, нало-
женное на ориентир
(точка Oj) в момент включения программного сопрово-
ждения цели (рис. 180), будет перемещаться синхронно
с этим ориентиром. При угле визирования, равном нулю
(точка О2), ориентир по-прежнему будет на перекрестии
сетки.
При ветре ориентир, находящийся на перекрестии
сетки в момент включения программного сопровожде-
ния цели, за время наблюдения сместится и окажется
в точке А. Величина смещения при этом будет зависеть
от скорости ветра и времени наблюдения, а направле-
ние смещения — от курсового угла ветра.
Из рисунка следует, что
г Ut
272
или
r=f^u'
где г — перемещение ориентира в поле зрения при-
цела;
f—фокусное расстояние объектива;
t—время наблюдения.
Приняв отношение t[H постоянным, окончательно
получим
г = c/t7.
Следовательно, отрезок г в масштабе изображает ве-
личину ветра, а угол между этим отрезком и курсовой
чертой является курсовым углом ветра. Для отсчета
величины ветра на подвижной сетке нанесена линейка
ветра. Совмещение линейки ветра с ориентиром осуще-
ствляется с помощью ручки (кремальеры), которая ки-
нематически соединена с подвижной сеткой. Отсчет кур-
сового угла ветра производится по шкале кремальеры.
Начальный угол визирования определяется из фор-
мулы
1 IT TZ
tg9o = jr = cl/-
В общем случае можно считать, что
tg'P0 = tg'pK +eV. (86)
где <рК'—конечный угол визирования.
В прицеле он выбран равным 10° и на шкале углов
визирования отмечен двойным штрихом.
Как видно из формулы (86), начальный угол визи-
рования при постоянном конечном зависит только от
воздушной скорости. Поэтому для удобства работы
шкала 1 (рис. 172) установки начальных углов визиро-
вания, жестко закрепленная на валике 13, оцифрована
значениями воздушной скорости.
§ 52. ВЫЧИСЛЕНИЕ ТРЕБУЕМЫХ КООРДИНАТ
Требуемыми координатами являются .угол прицели-
вания <рп и угол наклона визирной липин ц,,. Для их
определения необходимо непрерывно вычислять балли-
стические функции, путевую скорость и угол сноса. Рас-
смотрим, каким образом это осуществляется в прицеле.
273
Вычисление баллистических функций.
В прицеле вычисляются две баллистические функции:
время падения бомбы Т и отношение Д//7. Как изве-
стно, эти функции зависят от высоты И, скорости V
и характеристического времени 0 и задаются в виде
таблиц.
Механизм, обеспечивающий вычисление функции, за-
висящей от трех переменных и заданной в виде таб-
лицы, создать невозможно. Поэтому для определения
Рис. 181. Механизм выработки путевой скорости:
1,3 и 7 — коноиды; 2 — рукоятка; 4 — кулачок; 5 — коромысло; б — ось
баллистических функций используются приближенные
формулы.
При вычислении времени падения бомбы не учиты-
вается его зависимость от скорости. При вычислении
отношения Д//7 ее зависимость от высоты учитывается
приближенно. Эти допущения возможны потому, что Т
мало зависит от скорости, а Д//7 — от высоты.
Вычисление Т и Д//7 осуществляется с помощью
двух коноидных механизмов (рис. 181), каждый из ко-
торых включает коноид, толкатель (коромысло) и кор-
пус. Коноид представляет собой пространственный ку-
лачок. Он имеет две степени свободы: поступательное и
вращательное движение. Поверхность коноида рассчи-
274
тапа так, что перемещение толкателя, соприкасающе-
гося с его поверхностью, пропорционально значению
функции двух переменных.
Характеристическое время © вводится рукояткой 2.
При этом коноид 1, вырабатывающий величину отно-
шения ЩН, поворачивается, а коноид 7, вырабатываю-
щий величину Т, смещается вместе с осью 6 с помощью
кулачка 4 и коромысла 5. Смещение коноида 1 пропор-
ционально V, а поворот коноида 7 пропорционален Н.
Перемещение коромысла и толкателя коноидных меха-
низмов передается соответственно на щетки потенцио
метров /7(7) и П(Д/Н). Эти потенциометры включены
в следящие системы для передачи в головку прицела
значений Т и Д/7/, выработанных в решающем приборе.
На оси 6 имеется еще коноид 3, вырабатывающий
значение Н/Т. Он кинематически связан со щеткой по-
тенциометра П(Н!Т), который используется в счетно-
решающей схеме для вычисления угла прицеливания.
Определение путевой скорости и угла
сноса. При определении путевой скорости векторным
способом модуль вектора путевой скорости вычисляется
по приближенной формуле:
= Н+/(/7, cose), (87)
где f(U, cose)—поправка, учитывающая величину и
направление ветра.
Угол сноса вычисляется по формуле (78). Воздуш-
ная скорость вводится посредством вращения червяка 9
(рис. 182). При этом угол поворота щеток потенциоме-
тров ) и /7( UZ ) будет пропорционален значе-
нию воздушной скорости. Поправка f(U, cose), учиты-
вающая величину и направление ветра, вводится путем
смещения обоймы 8 вместе с червяком 9 вдоль оси его
вращения. При перемещении червяка вдоль оси червяч-
ная шестерня 10 и связанные с ней щетки потенцио-
метров П (W а) и n(W ) повернутся, на дополнитель-
ный угол, пропорциональный величине поправки f(U,
cose). Следовательно, суммарный поворот щеток потен-
циометров будет пропорционален величине путевой ско-
рости IF, вычисленной по формуле (87).
Перемещение червяка 9 вдоль его оси происходит от
механизма ветра следующим образом. С помощью ру-
275 ’
коятки 4 и связанной с ней шестерни 2 в механизм
ветра вводится величина скорости ветра U. При пово-
роте рукоятки 4 перемещается рейка 5 с пальцем 3',
сцепленная с шестерней 2. При этом палец 3' рейки 3
смещается относительно оси рукоятки на величину, про-
порциональную скорости ветра.
Рис. 182. Механизм выработки путевой скорости:
I — корпус; 2 — шестерня; 3 — рейка; 3' — палец; 4 — рукоятка; 5 — шестерня;
6 — кулиса; 7 — кривошип; 8 — обойма; 9 — червяк; 10 — шестерня
Поворотом корпуса 1 вместе с помещенной в нем
рейкой 3 в механизм вводится курсовой угол ветра е.
Поворот корпуса обеспечивается через шестерню 5.
Перемещение пальца 3', зависящее от скорости вет-
ра U и его курсового угла е, через кривошип 7 пере-
дается обойме 8.
Угол сноса определяется из равенства
W sin а — U sin е. (88)
Вычисление угла сноса по формуле (88) осущест-
вляется счетно-решающей схемой (рис. 183). Она вклю-
чает потенциометры-датчики /7(lFa), /7(sins) и потен-
27G
циометр-приемник П(sinа). Датчики расположены в ре-
шающем приборе, а приемник — в головке прицела.
Потенциометр /7(i7sine) кинематически соединен
(рис. 182) с пальцем 3' черев кулису 6. Эти звенья об-
разуют синусный механизм, поэтому перемещение щет-
ки потенциометра будет пропорционально величине
U sin е.
Щетка потенциометра-приемника кинематически
связана с электромагнитной муфтой. При равновесном
состоянии схемы щетка будет повернута на угол, про-
Рис. 183. Схема вычисления угла сноса
порциональный углу а, так как функциональный потен-
циометр преобразует функцию sin а в угол а.
Синхронный способ определения путевой скорости
рассмотрен при 'вычислении угла прицеливания.
Вычисление угла прицеливания. Как сле-
дует из рис. 150:
Поделив обе части равенства (68) на величину И,
и, кроме того, имея в виду, что cosa^l *, получим
. WT д , L— Г ,Rq.
tg^n— н н + 2// ( 9)
* При практически возможных значениях угла сноса а значе-
ние cos а близко к единице.
277
По формуле (89) в прицеле ОПБ-11 вычисляется
угол прицеливания. Последний член формулы (89)
определяется заранее и вводится вручную. Второй член,
как было установлено ранее, вычисляется автомати-
чески.
При векторном способе определения путевой
скорости величина WT/H вычисляется электрическим
счетно-решающим устройством по формуле
(90)
о
о
Рис. 184. Схема вычисления вели-
ЧИНЫ —ъ,—
//
В схему (рис. 184), решающую зависимость (90),
входят потенциометры-датчики П(№а'), П(Н)Т), вклю-
ченные по схеме деления, и потенциометр-приемник
/7(tg<po)
Щетки потенциометров-датчиков, находящихся в ре-
шающем приборе, поворачиваются на углы, пропорцио-
нальные W и HIT. Потенциометр /7(tg<p0) находится
в головке прицела. Его щетка (рис. 185) кинематически
соединена с рукояткой синхронизации 8, которая с по-
мощью переключателя 9 связана с электромагнитной
муфтой. Поэтому щетка потенциометра при равновес-
ном состоянии схемы окажется повернутой на угол,
278
• л
Рис. 185. Механизм ciiiixpouin.'iniiii:
7—'Диск; 2— ролик; 8—винт; ? — ролик; 5 м повод пинг; б и 7— шестер-
ни; 8— рукоятка синхронилиции; S — переключатель
279
пропорциональный величине WTjH. Эта величина по-
ступает также в механизм синхронизации для смещения
ведомого ролика 2 с помощью винта 3.
В прицеле ОПБ-11 угловая скорость ведомого роли-
ка 2 фрикционного механизма
Смещение р ролика 2 относительно центра диска 1
связано с угловой скоростью юг ролика 2 равенством
(72), из которого следует, что
Подставив сюда значение юг, получим
Чтобы учесть время падения бомбы Т, во фрикцион-
ном механизме прицела ОПБ-11 предусмотрен второй
ведущий ролик 4, приводимый во вращение с постоян-
ной угловой скоростью со4 от мотора путевой скорости
(МПС) через шестерню 7. Это дает возможность изме-
нять угловую скорость он фрикционного диска 1 изме-
нением смещения ролика 4 относительно центра ди-
ска 1 винтом 5.
Имея в виду, что
Р'ш1 =
находим
Г<1>,
<01 = —.
₽
Подставив значение он в формулу (91), получим
m2 , W
Р = ^-Р-7Г-
В прицеле ОПБ-11 смещение р' устанавливается
пропорционально времени Т падения бомбы, т. е.
р' = tri Т.
Следовательно:
ТП.;ГП' WT
~Н‘
При синхронном способе определения путе-
вой скорости смещение р ведомого ролика 2 фрикцион-
280
ного механизма подбирается в процессе синхронизации.
Смещение ролика при этом осуществляется рукояткой
синхронизации 8. Переход от одного вида работы при-
цела к другому осуществляется посредством рукоятки
переключателя 9.
Члены, входящие в формулу угла прицеливания,
суммируются с помощью дифференциалов Д\ и Д%
(рис. 186). Разность второго и третьего членов, полу-
ченная на дифференциале Дъ поступает на солнечное
колесо 6 дифференциала Д\. На водило 5 этого диф-
ференциала подается первый член. В результате второе
солнечное колесо 7 повернется на угол, пропорциональ-
ный тангенсу угла прицеливания.
В случае прицеливания по подвижной цели синхро-
низация выполняется непосредственно по цели. При
этом в результате синхронизации будет измерена так
называемая приведенная путевая скорость, т. е. ско-
рость самолета относительно цели.
Вычисление угла наклона визирной
линии. Второй требуемой координатой является угол
наклона визирной линии рп. Этот угол переменный и
зависит от угла визирования. Поэтому назовем его тре-
буемой текущей координатой и обозначим рп.
Заменим в формуле (69) координату у ее требуе-
мым значением Asina формулы (67), а угол р углом р.
После замены получим
1g Рп = -fj sin a cos <p.
Так как
A ,
где у — угол отставания, т. е. угол, под которым видна
с самолета точка падения бомбы в момент ее встречи
с землей (рис. 150), можно записать, что
tgPn = tgYsinacos?. (92)
Величина tgpn вычисляется устройством, состоящим
из двух коноидных механизмов (рис. 187). С коноида 6
в виде перемещения толкателя 5 снимается величина,
пропорциональная произведению tgysina. При этом
281
к
В механизм створок
Рис. 186. Механизм предупреждения и сигнали-
зации:
Z— шесхерня; 2. 4, 6 и Z — солнечные колеса. 3 и J— во-
дила; 5 — шестерня
282
коноид с помощью электромагнитной муфты «tgy», гай-
ки 1 и ходового винта 2 перемещается в осевом на-
правлении на величину, пропорциональную tg-p Пово-
рот его с помощью электромагнитной муфты «а» про-
порционален углу сноса.
Рис. 187. Механизм наклона визирной линии:
/ — гайка; 2 — ходовой винт; 3 — рычаг; 4 — тяга; 5 и 10 — толкатели; 6 и
it — коноиды; 7 и 8—шестерни; 9 — рычаг; 12— коническая передача
Коноид 11, имеющий кинематическую связь с меха-
низмом визирования через передачу 12, поворачивается
на угол, пропорциональный tg<p. Его толкатель К) сме-
щается вдоль коноида на величину, пропорциональную
произведению tgytgtp. Поверхность коноида рассчита-
на так, что перемещение толкателя пропорционально
tgR,-
283
Движение толкателя 10 передается на рычаг 9, тя-
гу 4 и далее через дифференциал на призму наклона.
Рычаг 9 является тангенсным механизмом, преобразую-
щим величину tgpn в значение угла рп-
Таким образом, визирная линия, наклоненная на
угол |дп, который определяется формулой (92), будет
отмечать требуемое положение цели. Для точки сбрасы-
вания <р=<рп и, следовательно:
tgHn = tgy sin acos <рп.
Толкатель 5 с помощью рычага 3 кинематически
связан с потенциометром Z7(p.0)> входящим в схему свя-
зи оптической и радиолокационной визирных систем по
направлению (рис. 169).
§ 53. ВЫПОЛНЕНИЕ ПРИЦЕЛИВАНИЯ
Задача прицеливания, как было установлено ранее,
решается в два этапа. Вначале осуществляется прице-
ливание по направлению, а затем — прицеливание по
дальности.
При прицеливании по направлению
головка прицела автоматически поворачивается на угол
сноса относительно оси самолета, курсовая черта опти-
ческой системы устанавливается в плоскости его пути,
а визирная линия отклоняется от этой плоскости на тре-
буемый угол рп.
Прицеливание по направлению считается выполнен-
ным, если при указанном положении головки прицела
цель будет на курсовой черте. Если цель не находится
на курсовой черте, то головку прицела с помощью ру-
коятки дополнительно поворачивают на угол А Д так,
чтобы курсовая черта прицела прошла через цель. Угол
АД принимают в качестве параметра управления, зна-
чение которого передается в автопилот. Следовательно,
в прицеле ОПБ 11 параметр управления
Посредством автопилота курс самолета изменяется
так, чтобы параметр управления q убывал, приближаясь
к нулю. При ДД=0 разворот самолета прекратится.
Если при этом цель будет на курсовой черте, то прице-
ливание по направлению выполнено.
281
Автоматический разворот головки прицела осущест-
вляется при отработке угла сноса, вычисляемого по
формуле (88). При этом головка прицела (рис. 188)
разворачивается на угол сноса относительно шестер-
ни 9, которая при включенной муфте автопилота стаби-
лизируется с помощью гироскопа стабилизатора курса.
При выполнении прицеливания по направлению при-
цел должен быть стабилизирован. Для этого муфта
Рис. 188. Механизм отработки угла сноса:
1 и 5 — рукоятки; 2 — рукоятка сноса; 3 — рукоятка разворота; 4— муфта;
6, 3 и 10— червяки; 7 — червячный сектор; 9—шестерня сноса
прицела включается, а муфта автопилота выключает-
ся. В этом случае будет стабилизирован червячный сек-
тор 7, а шестерня сноса 9 окажется свободной.
Разворот головки прицела для наложения курсовой
черты на цель осуществляется с помощью рукоятки
разворота 3. При этом самолет будет изменять курс на
величину угла разворота головки прицела.
Если при вычислении угла сноса возникла большая
ошибка, то прицеливание по направлению выполнить
285
невозможно (цель смещается с курсовой черты). Ошиб-
ку можно уменьшить, изменив угол сноса вручную. Для
этого корпус потенциометра /7 (sin а) с помощью руко-
ятки 1 и червяка 6 поворачивается относительно щетки
на необходимый угол.
Рукоятка 5 служит для включения муфты 4, которая
замыкает кинематическую цепь от электромагнитной
муфты «а» к рукоятке сноса 2 и червяку 10.
Для прицеливания по дальности выра-
батывается параметр сигнализации по формуле (81).
Механизм (рис. 186), осуществляющий решение этой
зависимости, конструктивно совмещен с механизмом,
вырабатывающим угол прицеливания. На солнечном
колесе 7 дифференциала Д\ смонтированы контакты
сброса Кс, угол поворота которых пропорционален tg<pu.
На шестерне 8, поворот которой пропорционален тан-
генсу угла визирования, находится третий контакт. При
р=0 контакты замыкаются и выдается импульс в элек-
тросбрасыватель.
В прицеле с помощью механизма Рх вырабатывает-
ся импульс, который поступает в механизм открытия
створок бомбового отсека за 3—16 сек до сбрасывания
бомб. Этот механизм решает зависимость
PT = tg? —tg<pT,
где —угол предупреждения.
Тангенс этого угла вырабатывается дифференциа-
IY/ f
лом Дз, в который поступает tg<pn и к (к —посто-
янный коэффициент). При этом значение tg<pn подается
на солнечное колесо 2. На другое солнечное колесо 4
WT „
подается величина к-^-. При вращении солнечных ко-
лес водило 3 повернется на угол, пропорциональный
tg?T-
Механизм Р_ включает в себя контакты предупреж-
дения Ка, один нз которых смонтирован на водиле,
а другой — на шестерне /.
Угол поворота шестерни пропорционален tg<p. Если
PT==tg'iP~tg'?T = 0-
замыкаются контакты и выдается команда на открытие
сгворок бомбового отсека.
286
§ 54. ГИРОВЕРТИКАЛЬ
Для стабилизации поля зрения оптической визирной
системы применена гироскопическая вертикаль с авто-
матической коррекцией. Основным элементом гировер-
тикали является гиромотор ГМ (рис. 189,а), смонтиро-
ванный в кардановом подвесе, состоящем из внутрен-
ней и внешней рам. Такая конструкция обеспечивает
сохранение вертикального положения оси гироскопа при
поворотах самолета вокруг продольной и поперечной
осей.
Рис. 189. Схема гировертикали с автоматической коррекцией:
а — гиромотор; 6 — схема автоматической коррекции
В случае отклонения оси гироскопа от вертикально-
го положения в работу включается схема автоматиче-
ской коррекции, которая возвращает .гироскоп в нужное
положение. В схему автоматической коррекции
(рис. 189,6) входят чувствительный элемент — жидко-
стный датчик Д, усилители УСЬ УС2 и два коррекцион-
ных мотора KMi и КМ2, смонтированных на осях внеш-
ней и внутренней рам.
Жидкостный датчик представляет собой сфериче-
ский уровень. В корпусе его смонтированы две пары
контактов. При горизонтальном положении корпуса
каждый из контактов наполовину перекрывается токо-
проводящей жидкостью, и токи, протекающие через
диаметрально противоположные контакты, будут оди-
287
наковыми. При отклонении датчика величины токов из-
меняются, что приводит к возникновению сигнала рас-
согласования.
При отклонении гировертикали в продольном напра-
влении (поворот внутренней рамы) сигнал рассогласо-
вания после усиления усилителем УС\ поступит на кор-
рекционный мотор КМ1. Коррекционный момент, воз-
никший в моторе, вызовет прецессию (отклонение) ги-
роскопа и возвратит его в исходное положение.
При повороте внешней рамы точно также возникает
момент в коррекционном моторе КМ2, возвращающий
ее в первоначальное (горизонтальное) положение.
Направление коррекционных моментов, возникаю-
щих в моторах, зависит от знака сигнала рассогласова-
ния, т. е. от направления отклонения оси гироверти-
кали.
§ 55. СТАБИЛИЗАТОР КУРСА
Стабилизатор курса является частью автопилота"
АП-5 и предназначен для стабилизации курса самоле-
та. На стабилизатор курса устанавливается прицел
ОЦБ-11. При прицеливании стабилизатор используется
для стабилизации прицела по азимуту и управления са-
молетом с помощью рукояток прицела.
Основным элементом стабилизатора курса является
свободный гироскоп с горизонтальной осью вращения.
Неподвижная точка гироскопа закреплена с помощью
кардаНового подвеса 8 (рис. 190).
Уравновешивание возникших внешних моментов осу-
ществляется специальным устройством, состоящим из
датчика сигнала рассогласования 9, коррекционного
мотора 3, двух фрикционных передач 2 и двух электро-
магнитов 4. Коррекционный мотор 3 через шестерни
вала / кинематически связан с верхними шестернями
фрикционных передач 2. Нижние шестерни этих пере-
дач через шестерни вала 5 соединены с шестерней 7,
закрепленной на внешней раме карданового подвеса.
При срабатывании одного из электромагнитов через
соответствующую фрикционную передачу замыкается
кинематическая цепь от мотора 3 к шестерне 7. Управ-
ление электромагнитами осуществляется от датчика 9,
состоящего из щетки, закрепленной на внешней раме,
288
и контактной колодки, находящейся на корпусе гиро-
скопа.
Сигнал рассогласования появляется при отклонении
от горизонтального положения оси гироскопа. При этом
крутящий момент, развиваемый мотором 3, уравновесит
момент внешних сил и вернет ось гироскопа в горизон-
тальное положение.
Рис. 190. Схема стабилизатора курсаэ
1 — вал; 2 — фрикционная передача; 3 — кор-
рекционный мотор; 4 — электромагнит; S —
вал: 6 — барабан; 7 — шестерня; 8 — карда-
иовый подвес; 9 — датчик
На барабан 6 надеваются муфта автопилота и муф-
та прицела, которые с помощью рукояток могут вклю-
чаться (фрикционно соединяться с барабаном). Муфта
прицела с помощью тяги соединяется с червячным сек-
тором 7 (рис. 188), а муфта автопилота — с шестерней
сноса 9. Муфта автопилота связана также с датчиками
курса и крена курсовой коробки автопилота, закреп-
ленной на стабилизаторе.
*/, 10—320
289
При бомбометании с включенным автопилотом ис-
пользуются два положения муфт.
1. Муфта автопилота включена, а при-
цела выключена. При этом оказываются стаби-
лизированными муфта автопилота, щетки датчиков кур-
са и крена и шестерня сноса. Это обеспечивает полет
самолета с заданным курсом. Такое положение муфт
используется также при отработке угла сноса после из-
мерения ветра. При этом прицел развернется на угол
сноса относительно стабилизированной шестерни сноса.
2. Муфта прицела включена, а автопи-
лота выключена. При этом оказывается стабили-
зированным прицел и муфта автопилота. Поэтому авто-
пилот по-прежнему обеспечивает полет самолета с за-
данным курсом. Но в любой момент времени штурман
может изменить курс самолета, повернув муфту авто-
пилота рукоятками прицела.
290
ГЛАВА IX
АВИАЦИОННЫЕ БОМБЫ
§ 56. НАЗНАЧЕНИЕ, КЛАССИФИКАЦИЯ И ОСНОВНЫЕ
ХАРАКТЕРИСТИКИ АВИАБОМБ
Авиационными бомбами (авиабомбами) называются
боеприпасы, сбрасываемые с самолетов и вертолетов
для поражения наземных и морских целей или для ре-
шения специальных и вспомогательных задач, таких
как, например, освещение местности, постановка дымо-
вых завес, разбрасывание агитационной литературы.
В зависимости от назначения авиационные бомбы под-
разделяются на три группы: основного, специального и
вспомогательного назначения.
Бомбы основного назначения служат для поражения
объектов противника действием взрыва, удара или огня.
К ним относятся следующие типы бомб:
— фугасные авиабомбы (предназначены для пора-
жения объектов фугасным действием взрыва);
— осколочные авиабомбы (предназначены для по-
ражения объектов осколками корпуса бомбы);
— осколочно-фугасные авиабомбы (предназначены
для поражения объектов осколками и фугасным дей-
ствием) ;
— бронебойные авиабомбы (предназначены для по-
ражения бронированных объектов путем пробивания
брони и последующего взрыва внутри объекта);
— противотанковые авиабомбы (предназначены для
поражения танков и других бронированных объектов
кумулятивным действием взрыва);
— противолодочные авиабомбы (предназначены для
поражения подводных лодок действием взрыва);
Ъ Ю*
291
— зажигательные авиабомбы (предназначены для
создания пожаров и поражения огнем живой силы и
техники);
— фугасно зажигательные авиабомбы (предназна-
чены для поражения объектов совместным действием
взрыва и огня).
К бомбам специального назначения относятся:
— фотографические авиабомбы (предназначены для
освещения местности при ночной аэрофотосъемке);
— дымовые авиабомбы (предназначены для поста-
новки дымовых завес);
— имитационные авиабомбы (предназначены для
имитации ядерных взрывов на учениях);
— практические авиабомбы (предназначены для
учебного бомбометания);
— агитационные авиабомбы (предназначены для
разбрасывания агитационной литературы).
К бомбам вспомогательного назначения относятся:
— светящие авиабомбы (предназначены для осве-
щения местности при бомбометании в ночных условиях
с помощью оптических прицелов);
— ориентирно-сигнальные авиабомбы (предназначе-
ны для обозначения района сбора групп самолетов, мар-
шрута полета самолетов, места выброски воздушных
десантов и т. д.).
Основными характеристиками авиабомб являются:
калибр, характеристическое время, коэффициент напол-
нения и показатели эффективности действия бомб. Для
того чтобы бомбы соответствовали размерам бомбовых
отсеков самолетов и обеспечивали максимально воз-
можное использование их грузоподъемности, геометри-
necfftie размеры и веса бомб регламентируются соответ-
ствующими стандартами.
Калибром называется вес авиабомбы, определяе-
мый стандартом. Действующие в настоящее время стан-
дарты предусматривают определенное число калибров.
Для каждого калибра установлены допустимые геоме-
трические размеры: общая длина бомбы, ее диаметр, по-
ложение центра тяжести.
Калибр бомбы указывается в ее условном наимено-
вании вместе с сокращенным обозначением типа бомбы.
Например, ФАБ 500— фугасная авиабомба калибра
500 кг, ЗАБ-2,5— зажигательная авиабомба калибра
292
2,5 кг ii т. д. При отклонении фактического веса бомбы
от ее калибра более чем на 10 15% в наименовании
бомбы указывается и ее фактический вес. Например,
ФОТАБ-250-215— фотографическая авиабомба калибра
250 кг с фактическим весом 215 кг; ПТАБ-10-5— про-
тивотанковая авиабомба калибра 10 кг с фактическим
весом 5 кг.
Характеристическим временем называ-
ется время падения авиабомбы, сброшенной при нор-
мальных атмосферных условиях с горизонтально летя-
щего самолета со скоростью 40 м/сек с высоты 2000 м.
Характеристическое время зависит главным образом от
формы и веса бомбы и определяет ее баллистические
'качества. Существующие авиабомбы имеют характери
стическое время от 20, 28 до 33, 75 сек.
Коэффициентом наполнения называется
отношение веса снаряжения к полному весу авиабомбы.
Величина коэффициента наполнения изменяется от 0
до 1 и зависит от типа бомбы. Наибольшим коэффици-
ентом наполнения обладают противолодочные и фугас-
ные бомбы, наименьшим — осколочные и бронебойные
бомбы.
Показателями эффективности называются
численные критерии, позволяющие сравнивать между
собой по эффективности действия различные образцы
авиабомб. Конкретный вид показателя эффективности
зависит от типа бомбы. Например, для фугасных бомб
таким показателем служит радиус зоны поражения
объекта или объем воронки, для светящих — сила света
и продолжительность освещения, для зажигательных —
температура и продолжительность горения зажигатель-
ного состава, количество очагов горения и т. д.
§ 57. УСТРОЙСТВО ТИПОВОЙ АВИАБОМБЫ
Типовая авиабомба (рис. 191) состоит из корпуса /,
снаряжения 2, подвесной системы 3, стабилизатора 4 и
баллистического кольца 5. При окончательном снаря-
жении в нее устанавливаются взрыватели 6.
Корпус служит для соединения всех частей бомбы
в единое целое. Он обеспечивает герметичность снаря-
жения и поражающее действие осколочных и осколоч-
но-фугасных бомб, а также способность бронебойных,
11—320
293
фугасных и других типов бомб пробивать преграды и
проникать в них без нарушения целостности снаряже-
ния.
Корпус бомбы имеет три характерных части: голов-
ную, среднюю и хвостовую. Головная часть корпуса
имеет профилированную форму в виде оживала, полу-
сферы или конуса. Такая форма обеспечивает хорошую
обтекаемость бомбы на траектории, а для бомб удар-
ного действия, кроме того, способность хорошо прони-
кать преграды. Хвостовая часть корпуса обычно имеет
I— корпус: 2— снаряжение; 5—подвесная система (ушки); 4— стабилиза-
тор; 5 — баллистическое кольцо; 6 — взрыватель; 7— запальные стаканы;
8 — дополнительные детонаторы
коническую форму, благодаря которой уменьшается си-
ла сопротивления воздуха, действующая на бомбу.
В зависимости от технологии изготовления корпусы
подразделяются на сварные, цельнокованые, литые,
штампованные.
Наружная поверхность корпуса бомбы для предо-
хранения от коррозии в процессе хранения и транспор-
тировки окрашивается масляной краской серо-дикого
цвета. Учебные образцы авиабомб окрашиваются в чер-
ный цвет.
Внутренняя поверхность корпуса покрывается ла-
ком, который предохраняет ее от коррозии и изолирует
снаряжение от металла корпуса.
Снаряжение бомбы представляет собой заряд
бризантного взрывчатого вещества или пиротехнический
состав и размещается внутри корпуса. Со стороны го-
ловной и хвостовой частей к корпусу привариваются
пли присоединяются на резьбе один или несколько за-
294
пальных стаканов 7 для установки в бомбу дополни-
тельных детонаторов 8 и взрывателей. Дополнительные
детонаторы применяются в авиабомбах, снаряженных
взрывчатыми веществами, и служат для передачи
взрывного импульса взрывателя основному заряду бом-
бы. Они изготовляются в виде отдельных шашек из
бризантного взрывчатого вещества — тетрила. В неко-
торых авиабомбах, снаряженных пиротехническими со-
ставами, в запальных стаканах вместо дополнительных
детонаторов устанавливаются пороховые воспламени-
тели для усиления луча огня, создаваемого взрывате-
лями. В запальном стакане имеется втулка с резьбой,
в которую ввертывается взрыватель. Резьбовое отвер-
стие под взрыватель называется очком бомбы.
Взрыватели приводят в действие снаряжение
бомбы в заданный момент времени. Они ввертываются
в бомбы обычно при подготовке к боевому вылету. Чис-
ло взрывателей, устанавливаемых в бомбе, равно числу
запальных стаканов. Бомбы калибра до 100 кг обычно
имеют один запальный стакан и снаряжаются соответ-
ственно одним взрывателем. Бомбы большего калибра
имеют два или большее число запальных стаканов.
Применение в одной бомбе нескольких взрывателей по-
вышает надежность действия снаряжения, так как од-
новременный отказ нескольких взрывателей малове-
роятен.
При хранении и транспортировке авиабомб в запаль-
ные стаканы вместо взрывателей ввертываются метал-
лические или пластмассовые пробки, которые предохра-
няют очко от загрязнения, а внутреннюю полость стака-
на— от попадания влаги и грязи.
Подвесная система предназначена для под-
вески бомб на самолеты и состоит из одного или не-
скольких подвесных ушков, приваренных к корпусу.
Бомбы калибра от 50 до 100 кг имеют одно подвесное
ушко, расположенное по центру их тяжести. Бомбы ка-
либра 250 кг и выше имеют два подвесных ушка.
Авиабомбы малых калибров (до 25 кг) подвесной си-
стемы не имеют. Они сбрасываются с самолетов в ра-
зовых бомбовых кассетах (РБК) и связках (РБС).
Стабилизатор обеспечивает устойчивый полет
бомбы в воздухе после сбрасывания ее с самолета.
Бомба считается устойчивой, если во время падения ее
11*
295
ось все время совпадает с вектором скорости, который
под действием силы тяжести непрерывно изменяет свое
положение в пространстве. Бомба без стабилизатора
при падении в воздухе совершает вращательное движе-
ние относительно центра тяжести — кувыркается. Ку-
выркающаяся бомба не позволяет выполнять прицель-
ное бомбометание, так как ее траектория зависит от
большого числа случайных факторов, которые невоз-
можно учесть при прицеливании.
На рис. 192, а показано положение бомбы без ста-
билизатора в начальный момент после сбрасывания
с горизонтально летящего самолета. В этом положении
вектор скорости бомбы о01 равный скорости самолета,
направлен вдоль оси бомбы, а сила сопротивления воз-
духа /? — в обратную сторону. На рис. 192,6 показано
положение этой бомбы через некоторое время после
сбрасывания. К этому моменту бомба под действием
ускорения силы тяжести приобретает вертикальную со-
ставляющую скорости Vi. За счет этой составляющей
вектор полной скорости бомбы t>oi = ^o + ^i будет откло-
нен от оси бомбы на угол а, называемый углем атаки
бомбы. При наличии угла атаки бомба располагается
несимметрично относительно воздушного потока, кото-
рый ее обтекает в направлении вектора fOi- Поэтому
сила сопротивления воздуха будет составлять с осью
бомбы некоторый угол. Точка приложения этой силы,
называемая центром давления, для тел продолговатой
формы (такую форму имеет корпус бомбы) находится
впереди центра тяжести, и сила R будет создавать относи-
тельно него опрокидывающий момент М, стремящийся
увеличить угол атаки. Под действием этого момента
бомба во время падения вращается (кувыркается).
Стабилизатор увеличивает сопротивление хвостовой
части бомбы, вследствие чего центр давления смещает-
ся в точку, лежащую позади центра тяжести. При та-
ком положении центра давления (рис. 192, в) сила
сопротивления воздуха R создает момент, стремящийся
уменьшить угол атаки, т. е. совместить ось бомбы с век-
тором скорости.
В авиабомбах применяются перистые, перисто-ци-
линдрические и коробчатые стабилизаторы. Перистый
стабилизатор имеет четыре или больше пластин
296
(перьев), закрепленных на хвостовом конусе бомбы.
Перисто-цилиндрический стабилизатор состоит из перь-
ев и одного или нескольких цилиндрических колец, со-
единяющих перья. Стабилизаторы такого типа находят
Рис. 192. Схема, поясняющая работу стабилиза-
тора:-
а — положение бомбы в начальный момент после сбра-
сывания; б — схема возникновения момента М для бом-
бы без стабилизатора; в — то же для бомбы со стаби-
лизатором
наибольшее применение в современных бомбах. У ко-
робчатого стабилизатора перья соединяются широкими
пластинами — полками, которые образуют четырех-
угольную коробку.
297
Чем больше площадь стабилизатора, тем выше
устойчивость бомбы. От исправности стабилизатора за-
висят устойчивость авиабомбы и точность бомбомета-
ния.
Баллистическое кольцо, приваренное к го-
ловной части бомбы, обеспечивает устойчивость бомбы
пре полете ее со'скоростью, близкой к скорости звука.
При полете бомбы с околозвуковой скоростью из-за
искривления потока воздуха, обтекающего бомбу, в от-
дельных местах корпуса (обычно на подвесных ушках,
сварных швах и других неровностях) достигается мест-
ная скорость звука, и возникают скачки уплотнения, за
которыми давление воздуха резко возрастает. Такие
скачки распределяются по поверхности бомбы случай-
ным образом и служат причиной потери бомбой устой-
чивости. При наличии баллистического кольца скачки
уплотнения возникают на самом кольце и не оказывают
влияния на устойчивость бомбы.
§ 58. ВЗРЫВЧАТЫЕ ВЕЩЕСТВА
Взрывчатыми веществами (ВВ) называют-
ся вещества, способные под влиянием внешних воздей-
ствий к очень быстрым химическим или физическим
превращениям с выделением большого количества тепла
и образованием сильно нагретых газов. Такое превра-
щение взрывчатых веществ носит название взрыва. На
практике находят применение два типа взрывчатых ве-
ществ: химические и ядерные. Взрыв химических ВВ,
часто называемых обычными, представляет собой бы-
стропротекающую химическую реакцию, в результате
которой первоначальное вещество превращается в дру-
гие вещества — продукты взрыва. Характерным призна-
ком взрыва является резкий скачок давления в среде,
окружающей место взрыва. Этот скачок давления слу-
жит непосредственной причиной разрушительного дей-
ствия взрыва, которое обусловливается быстрым рас-
ширением его газообразных продуктов.
В зависимости от применения взрывчатые вещества
разделяются на четыре группы: инициирующие, бри-
зантные, метательные, или пороха, и пиротехнические
составы.
298
Инициирующие ВВ применяются для снаряже-
ния средств инициирования, которыми называют уст-
ройства, предназначенные для возбуждения взрыва
других ВВ. В частности, инициирующие ВВ использу-
ются для снаряжения капсюлей взрывателей бомб. Ха-
рактерная особенность этих ВВ состоит в том, что для
возбуждения их взрыва требуется незначительное внеш-
нее воздействие (удар, накол, луч огня). Основными
представителями инициирующих ВВ являются: гремучая
ртуть, азид свинца, ТНРС и тетразен.
Бризантные ВВ применяются в качестве разрыв-
ных зарядов авиабомб и других боеприпасов. В отли-
чие от инициирующих, бризантные ВВ обладают мень-
шей восприимчивостью к внешним воздействиям. Так,
например, наиболее распространенное бризантное ВВ —
тротил — при соблюдении правил техники безопасности
можно сверлить, плавить; он при этом не взрывается.
Подожженный тротил на открытом воздухе сгорает без
взрыва. Тротил не взрывается при простреле заряда
обыкновенной пулей. Взрывчатое превращение бризант-
ных ВВ вызывается обычно взрывом инициирующих ВВ.
В зависимости от химической природы бризантные
ВВ подразделяются на однородные и неоднородные.
Основными представителями однородных ВВ являются:
тротил, тетрил, гексоген, тэн, пироксилин, нитроглице-
рин, динитронафталин. Представителями неоднородных
бризантных ВВ являются: сплавы тротила с гексогеном
и алюминиевым порошком (ТГ и ТГА), сплав тротила
с динитронафталином, тротила с аммонийной селитрой
(аммотол). Из перечисленных бризантных ВВ для сна-
ряжения авиационных бомб в настоящее время приме-
няются: тротил и сплавы тротила с гексогеном и дини-
тронафталином.
Заряд ВВ из расплавленного при температуре 81° С
чистого тротила или сплава тротила с другими ВВ за-
ливается в корпус бомбы. Сплавы тротила с гексогеном
изготавливаются перемешиванием расплавленного тро-
тила с порошкообразным гексогеном. Для повышения
фугасного действия взрыва в сплав добавляется алю-
миниевый порошок. Эти сплавы отличаются повышен-
ной мощностью по сравнению с чистым тротилом, так
как содержат одно из наиболее мощных однородных
ВВ — гексоген, который в чистом виде не применяется
299
из-за его высокой восприимчивости к механическим воз-
действиям.
Сплавы тротила с динитронафталином применяются
для снаряжения осколочных и осколочно-фугасных авиа-
бомб в том случае, если в конструкции бомб не преду-
смотрено каких-либо мер, обеспечивающих дробление
корпуса на осколки определенного веса. При использо-
вании в таких бомбах тротила или других более мощ-
ных ВВ происходит излишне интенсивное дробление
корпуса на осколки. При этом значительная часть ме-
талла корпуса расходуется непроизводительно, дробясь
на очень мелкие осколки, поражающее действие кото-
рых невелико. Сплав тротила с динитронафталином об-
ладает пониженной мощностью по сравнению с чистым
тротилом.
Пороха (или метательные ВВ) применяются, глав-
ным образом, для метания снарядов в огнестрельном
оружии и создания реактивной силы в ракетах. По фи-
зической структуре пороха разделяются на две группы-
смесевые и нитроцеллюлозные, или бездымные. В бом-
бардировочных боеприпасах применяется простейший
смесевой порох, называемый дымным, или черным. Он
состоит из калиевой селитры, древесного угля и серы.
Дымный порох применяется для изготовления вышиб
ных зарядов разовых бомбовых кассет и авиабомб спе-
циального и вспомогательного назначения, а также в
качестве замедлителей и усилителей луча огня во взры-
вателях. ф
Пиротехнические составы применяются для
снаряжения зажигательных бомб и бомб специального
и вспомогательного • назначения. Они представляют
собой механические смеси неорганических окислителей
с органическими и металлическими горючими веще-
ствами.
В зависимости от скорости взрывной реакции раз-
личают три вида взрывных процессов: горение, взрыв и
детонацию.
Горением называют процесс взрывчатого пре-
вращения, протекающий сравнительно медленно и с пе
ременной скоростью, обычно от долей сантиметра до
нескольких метров в секунду. Горение является харак-
терным видом взрывчатого превращения порохов и пи-
ротехнических составов.
300
Взрывом называют процесс превращения, проте-
кающий также с переменной скоростью, но измеряемой
уже тысячами метров в секунду. Процесс характеризу-
ется резким скачком давления в месте взрыва и ударом
газов по окружающей среде, вызывающим дробление и
сильные деформации предметов на относительно не-
больших расстояниях.
Детонация — это взрыв, распространяющийся по
заряду с постоянной и максимально возможной для
каждого ВВ скоростью. По своему характеру детона-
ция не отличается от взрыва, я представляет собой
лишь его установившуюся форму При детонации дости-
гается максимальное разрушительное действие взрыва.
Она является основным видом взрывчатого превраще-
ния инициирующих и бризантных ВВ. Скорость детона-
ции ВВ, применяемых па практике, лежит в пределах
4000—9000 м/сек.
Важнейшими характеристиками ВВ являются: чув-
ствительность, стойкость и теплота взрыва.
Чувствительностью взрывчатых веществ на-
зывается их способность к взрывчатым превращениям
под влиянием внешних воздействий (удара, накола,
луча огня). Наибольшее влияние на чувствительность
ВВ оказывают плотность заряда и посторонние при-
меси. С увеличением плотности заряда чувствительность
уменьшается. Для повышения чувствительности в ВВ
вводят вещества, частицы которых имеют острые грани,
обладают высокой твердостью и температурой плавле-
ния (мелкое стекло, песок, металлический порошок).
Примеси, понижающие чувствительность ВВ, назы-
ваются флегм ат и заторам и. В качестве флегма-
тизаторов ВВ применяются парафин, воск, сплав пара-
фина с церезином и другие. Из взрывчатых веществ,
используемых в авиабомбах, флегматизации подвер-
гаются сплавы тротила с гексогеном при большом про-
центном содержании гексогена.
Стойкостью взрывчатых веществ называется их
способность сохранять свои свойства в условиях дли-
тельного хранения. Под влиянием влаги, колебаний тем-
пературы и химических превращений ВВ могут изме-
нять свои свойства, а некоторые из них даже самовос-
пламеняться. Наиболее стойкими являются большинст-
во бризантных ВВ, которые можно хранить в течение
301
десятков лет. Менее стойки пороха и пиротехнические
составы. Низкой стойкостью обладают также аммотолы.
Теплотой взрыва называется количество теп-
ла, которое выделяется при взрыве одного килограмма
взрывчатого вещества. Чем больше теплота взрыва,
тем больше разрушительное действие ВВ. Для ВВ, при-
меняемых в авиабомбах, теплота взрыва лежит в пре-
делах 900—1800 больших калорий на килограмм.
Разрушительное действие взрыва обусловлено рабо-
той, которую совершают газообразные продукты взры-
ва при расширении. Различают две основные формы
внешней работы взрыва — бризантное и фугасное дей-
ствие.
Бризантностью (бризантным действием) назы-
вается способность взрывчатых веществ к местному
разрушительному действию, которое является резуль-
татом резкого удара продуктов взрыва по окружающим
ВВ предметам. Бризантное действие проявляется лишь
на близких расстояниях от места взрыва, где давление
продуктов взрыва еще достаточно велико. Вследствие
бризантного действия происходит измельчение, проби-
вание и дробление среды, соприкасающейся с зарядом
ВВ, в частности дробление корпуса бомбы или снаряда
на осколки.
Фугасностью (фугасным действием) называет-
ся способность взрывчатых веществ к разрушительному
действию вследствие расширения продуктов взрыва до
сравнительно невысоких давлений и прохождения по
среде ударной волны. Фугасное действие проявляется
в форме раскалывания и отбрасывания среды, в кото-
рой происходит взрыв.
§ 59. АВИАБОМБЫ ОСНОВНОГО НАЗНАЧЕНИЯ
Фугасные авиабомбы (ФАБ) предназначены
для поражения большого числа целей, начиная от объ-
ектов на поле боя и кончая крупными военно-промыш-
ленными сооружениями. Поражающее действие ФАБ
обусловлено главным образом расширением газообраз-
ных продуктов взрыва и прохождением через среду, в
которой происходит взрыв, ударной волны. Кроме того,
ФАБ могут поражать цели осколками, образующимися
802
при дроблении стального корпуса, и ударным дейст-
вием. Обладая к моменту встречи с преградой большим
запасом кинетической энергии, они способны пробивать
преграды или проникать в них на достаточно большую
глубину.
При взрыве в воздухе ударная волна возникает при
расширении продуктов взрыва, которые в первый мо-
мент после взрыва занимают объем заряда, находясь
под давлением 150—200 тыс. атмосфер. Расширяясь,
продукты взрыва производят резкий удар по прилегаю-
щим слоям воздуха, в результате чего происходит их
сильное сжатие. Сжатие от этих слоев передается сле-
дующим слоям воздуха, от них другим и т. д. Одновре-
менно со сжатием в слоях воздуха резко возрастает
давление- происходит скачок давления. Распростра-
няющийся по воздуху скачок давления называется
ударной ролной.
По мере удаления ударной волны от места взрыва
ее интенсивность (давление) падает. Встречая прегра-
ду, ударная волна давит на нее. Это давление служит
причиной поражения объектов.
Фугасные бомбы (рис. 191) изготавливаются в ка-
либрах 250, 500, 1500 кг и более. Для снаряжения ФАБ
применяются тротил, сплавы тротила с гексогеном, а в
военное время и аммотолы. Фугасные бомбы отличают-
ся от других типов бомб высоким коэффициентом на-
полнения, который колеблется от 40 до 50%. В зависи-
мости от установки взрывателя взрыв ФАБ может про-
изойти либо в момент встречи с преградой, либо после
того, как бомба проникнет в преграду на заданную глу-
бину— с замедлением. Для поражения особо прочных
целен, таких как, например, бетонированные взлетно-
посадочные полосы аэродромов, фортификационные со-
оружения, подземные склады боеприпасов, применяются
специальные толстостенные фугасные бомбы, отличаю-
щиеся повышенной прочностью корпуса.
Эффективность действия ФАБ принято оценивать
различными характеристиками. Поражающее действие
ФАБ при взрыве у поверхности земли обычно характе-
ризуют радиусом зоны поражения цели, при взрыве
в грунте — объемом воронки, ударное действие - глу-
биной проникания в грунт или толщиной бетонного пе-
рекрытия, пробиваемого бомбой
303
Радиус зоны поражения
вается по формуле
ft —/г У шг,
цели рассчиты-
(93)
где w — вес заряда бомбы, кг;
k — коэффициент, зависящий от типа цели и сте-
пени ее поражения.
Радиус поражения кирпичных зданий, подсчитанный
по формуле (93), для ФАБ-250 равен 2—3 м, а
ФАБ-9000—36 м.
Рис. 193. Зоны деформации при
взрыве в грунте
При взрыве ФАБ в
грунте (рис. 193) раз-
личают три зоны: сжа-
тия, разрушения и со-
трясения, в которых
действие взрыва про-
является по-разному.
В зоне сжатия проис-
ходит полное вытесне-
ние частиц грунта. В зо-
не разрушения нару-
шается связь между
отдельными частицами
грунта, образуются ра-
диальные и поперечные
трещины. В зоне сотря-
сения частицы грунта
приходят в постепен-
но затухающее колеба-
тельное движение.
Колебания грунта при взрыве называются сейсмиче-
скими колебаниями. Аналогичные колебания возникают
при землетрясениях. Взрыв в грунте фактически вызы-
вает искусственное землетрясение, захватывающее не-
которую область вокруг бомбы, размеры которой зави-
сят от веса заряда ВВ. Сейсмические колебания воз-
действуют на фундаменты зданий, вызывая их разру-
шение.
Взрыв ФАБ вблизи поверхности грунта на глубине,
не превышающей радиуса зоны разрушения, сопровож-
дается выбросом грунта и образованием воронки
(рис. 194), Создавая воронки, выводят из строя (пора-
304
жают) такие цели, как взлетно-посадочные полосы аэ-
родромов, шоссе, железные дороги.
Объем воронки зависит от веса заряда бомбы
и величины ее заглубления. Максимальный объем во-
ронки для ФАБ-250 равен 36 м3.
Взрыв ФАБ на большой глубине, когда воронки не
образуется, называется камуфлетом. Такой взрыв при-
меняется для поражения подземных целей.
Глубина проникания ФАБ в грунт зависит
от свойств грунта, формы бомбы, ее веса и скорости в
Рис. 194. Образование воронкн при взрыве
момент встречи с грунтом. Максимальная глубина, на
которую проникает бомба, рассчитывается по формуле:
£ = Un-g-t/csinec, (94)
где X — коэффициент, зависящий от формы головной
части бомбы;
ka—коэффициент, характеризующий сопротив-
ляемость грунта (для обычного грунта ka=
= 65- 10-8);
G — вес бомбы, кг;
d — диаметр бомбы, м;
vc—скорость бомбы в момент встречи ее с грун-
том;
6С — угол встречи бомбы с грунтом.
305
При сбрасывании с высоты 10 км, как следует из
формулы (94), ФАБ-250 проникает в грунт на глубину
до 4 м, а ФАБ-9000— на глубину до 12 м
Бронебойные авиабомбы (БРАБ) предна-
значены дЛя поражения бронированных кораблей воен-
но-морского флота и объектов, имеющих прочную бе-
тонную или железобетонную защиту. Поражающее дей-
ствие БРАБ складывается из пробивного действия с по-
следующим взрывом бомбы внутри цели. Корпуса
БРАБ изготовляются из специальных легированных
сталей, благодаря чему способны выдерживать высо-
кие нагрузки, действующие в процессе бронепроби-
вания.
Осколочно-фугасные авиабомбы (ОФАБ)
предназначены для поражения самолетов на открытых
стоянках, артиллерийских орудий, ракетных установок,
транспортных средств, живой силы и других целей.
ОФАБ отличаются от фугасных бомб увеличенной тол-
щиной стенок корпуса и соответственно меньшим коэф-
фициентом наполнения: он составляет 30—35%. Оско-
лочно-фугасные бомбы изготовляются двух калибров:
100 и 250 кг (рис. 195). Отличительной особенностью
бомбы служит пилообразный профиль внутренней по-
верхности корпуса, благодаря которому обеспечивается
дробление корпуса на осколки примерно одинаковою
веса.
Обычно ОФАБ снаряжаются двумя взрывателями.
В головное очко ввертывается неконтактный взрыватель,
который подрывает бомбу над поверхностью земли на
высоте 5—15 м. Взрывной импульс от головного взры-
вателя передается через центральную трубу 1, установ-
ленную вдоль оси бомбы, донному детонатору 2. Дето-
нация заряда с донной части отклоняет поток осколков
в направлении полета бомбы — к земле. Неконтактный
подрыв применяется для повышения эффективности
действия бомбы. Он способствует более рациональному
по сравнению с подрывом на поверхности земли разле-
ту осколков. При взрыве бомбы на поверхности земли
часть осколков теряется, углубляясь в грунт в месте
падения бомбы. При взрыве вблизи земли основная
масса осколков встречает преграду сверху, поражая
цели как на поверхности земли, так и в укрытиях (око
пах, траншеях).
306
Рис. 195. Осколочно-фугасная авиабомба:
/ — центральная труба; 2 — донный детонатор
307
В донное очко бомбы ввертывается взрыватель удар-
ного действия, который играет роль дублера, подрывая
бомбу при встрече с преградой в случае отказа некон-
тактного взрывателя.
Эффективность осколочного действия ОФАБ оцени-
вают радиусом зоны сплошного поражения цели. Его
величина равна радиусу круга, внутри которого вероят-
ность поражения цели равна единице. Для ОФАБ ра-
диус зоны сплошного поражения живой силы состав-
ляет 40—70 м. Для оценки фугасного действия ОФАБ
применяются те же характеристики, что и для ФАБ.
Рис. 196. Осколочная авиабомба
Осколочные бомбы (АО) предназначены для
поражения живой силы, автотранспорта, самолетов на
открытых стоянках и других целей. Бомбы имеют мас-
сивный корпус (рис. 196), рассчитанный на образование
большого числа осколков. Коэффициент наполнения
осколочных бомб составляет 5—20%. Для снижения
интенсивности дробления корпуса АО обычно снаря-
жаются взрывчатыми веществами пониженной мощно-
сти— сплавом тротила с динитропафталином.
Осколочные бомбы изготавливают небольших калиб-
ров: от 1 до 50 кг. Для их подрыва используются взры-
ватели мгновенного действия, срабатывающие в момент
встречи с преградой. Радиус зоны сплошного пораже-
ния живой силы для осколочных бомб калибра 1 кг
равен 10—12 м. Мелкие осколочные бомбы весом до
10 кг сбрасываются с самолета в разовых бомбовых
кассетах, а бомбы калибра 25 кг — в связках по не-
скольку бомб.
Разовая бомбовая кассета (рис. 197) представляет
собой тонкостенный контейнер, по внешнему виду не от-
личающийся от бомбы, внутри которого в несколько
рядов укладываются мелкие бомбы. Кассеты изготов-
308
ляются в габаритах фугас-
ных бомб калибра 250 и
500 кг. В головной части
кассеты имеется стакан, в
который вкладывается вы-
шибной заряд из черного
пороха и ввертывается ди-
станционная трубка. При
срабатывании трубки вос-
пламеняется вышибной за-
ряд. Под давлением порохо-
вых газов кассета разде-
ляется на две части, и бом-
бы рассыпаются. Величина
площади, на которой рас-
сеиваются бомбы, зависит
от высоты раскрытия кассе-
ты. Эта высота может изме-
няться установкой трубки на
соответствующее время за-
медления.
Противотанковые
бомбы (ПТАБ) предна-
значены для поражения объ-
ектов техники, имеющих
броневую защиту: танков,
бронемашин, самоходных
артиллерийских установок.
Изготавливаются ПТАБ не-
больших калибров: от 2,5 до
10 кг. Заряд 1 противотан-
ковых бомб (рис. 198) имеет
кумулятивную выемку, за-
крытую металлической об-
лицовкой 2. Для подрыва
ПТАБ используются дон-
ные взрыватели, срабаты-
вающие в момент встречи с
преградой. При детонации
заряда продукты взрыва об-
жимают облицовку, выдав-
ливая из нее две металли-
ческие струи, одна из кото-
Рис. 197. Разовая бомбовая кассета
309
рых называется кумулятивной, а другая — пестом. Про-
цесс обжатия облицовки и формирования из нее кумуля-
тивной струи иллюстрируется рис. 199. На нем показано
положение облицовки до взрыва и в момент, когда де-
Рис. 199. Образование кумулятивной струю
а — вид облицовки до взрыва; 6 — то же в процессе взрыва; в к г —
кумулятивная струя и пест
тонацией охвачена некоторая часть заряда. На часть
облицовки, находящуюся в продуктах взрыва, действует
давление последних, в результате которого облицовка
деформируется (захлопывается) и металл выдавли-
310
вается вперед и назад, образуя две струи. Кумулятив-
ная струя выдавливается в. направлении распростране-
ния детонации, пест — в обратном направлении. Ско-
рость кумулятивной струи значительно больше скорости
песта и достигает 20 000 м)сек. После детонации всего
заряда происходит полное обжатие всей облицовки и
заканчивается процесс формирования кумулятивной
струи. Имея большую скорость, кумулятивная струя на
некотором расстоянии от заряда отделяется от песта и
движется дальше caмoqтoятeльнo. Ее скорость настоль-
ко велика, что она способна пробить броню и иницииро-
вать взрыв при попадании в боеприпасы. Благодаря
высокой температуре кумулятивная струя способна так-
же воспламенять пары бензина и керосина.
Скорость металла в различных сечениях кумулятив-
ной струи неодинакова. Головная часть струи движется
с большей скоростью, чем ее хвостовая часть. Поэтому
по мере движения струя растягивается и длина ее уве-
личивается. Растяжение приводит к разрушению струи
на отдельные куски металла.
Глубина пробоины в броне при действии кумулятив-
ной струи
i = (95)
где I — длина струи в момент встречи с броней;
рс — удельный вес металла облицовки (струи);
р6 — удельный вес материала брони.
Так как глубина пробоины пропорциональна длине
струи, которая по мере движения растягивается, а за-
тем разрушается, то существует оптимальное расстоя-
ние заряда от брони, при котором кумулятивная струя
обладает наибольшей пробивной способностью. Это
расстояние называется фокусным. На фокусном рас-
стоянии струя имеет наибольшее удлинение, при кото-
ром она еще сохраняет свою монолитность. Для куму-
лятивных зарядов с выемкой конической формы и со
стальной облицовкой фокусное расстояние равно при-
мерно двум длинам образующей конуса.
Бронепробивное действие ПТАБ рассчитано па пря-
мое попадание бомбы в цель. Положение заряда бомбы
в момент взрыва на фокусном расстоянии от преграды
обеспечивается массивной головкой бомбы 3 (рис. 198).
31Г
Существующие ПТАБ пробивают броню толщиной до
200 мм.
Благодаря инициирующему и зажигательному дей-
ствию кумулятивной струи ПТАБ могут с успехом при-
меняться по складам боеприпасов открытого типа, ем-
костям с горючим, железнодорожным эшелонам, скоп-
лению автомашин. При взрыве ПТАБ их корпус дро-
бится на осколки, которые способны поражать живую
силу.
Противотанковые бомбы сбрасываются с самолета
в кассетах, как и мелкие осколочные бомбы.
Зажигательные бомбы (ЗАБ) предназначе-
ны для создания пожаров в тылу и прифронтовой по-
лосе противника, а также для непосредственного пора-
жения огнем живой силы и боевой техники на поле боя
и в местах скопления.
Зажигательные бомбы изготовляются калибром от 2,5
до 500 кг. Для их снаряжения используются твердые
пиротехнические составы и органические горючие веще-
ства. Из пиротехнических составов наибольшее приме-
нение в ЗАБ находит термитный состав. Основой его
служит термит — механическая смесь алюминия
с окислами железа. При горении термита образуются
жидкие шлаки с температурой до 2500—3000° С, кото-
рые, растекаясь, увеличивают площадь поражения
цели.
Органические горючие вещества (бензин, керосин)
применяются в ЗАБ в виде вязких огнесмесей, в кото-
рых растворены специальные загустители. В качестве
загустителей обычно используются алюминиевые соли
нафтеновой и высокомолекулярных жирных кислот.
Такую огнесмесь часто называют напалмом. Она имеет
вид студнеобразной массы, которая дробится взрывом
на крупные куски, хорошо прилипающие к различным
поверхностям. Время горения огнесмеси значительно
больше времени горения незагущенного горючего. Тем-
пература горения огнесмеси достигает 900—1300° С. Ту-
шение ее обычными средствами весьма затруднительно.
Попытки удалить куски огнесмеси с горящей поверхно-
сти приводят к их размазыванию и увеличению пло-
щади горения.
Устройство зажигательной бомбы показано на
рис. 200. Кроме вязкой огнесмеси 1 бомба снаряжена
312
патроном с фосфором 2 и патроном с разрывным за-
рядом 3. В головное очко бомбы ввертывается взрыва-
тель, срабатывающий в момент встречи с преградой.
Взрыватель инициирует взрыв разрывного заряда, ко-
торым разрушается корпус бомбы, дробятся и разбра-
сываются фосфор и огнесмесь. Фосфор на воздухе са-
мовоспламеняется и поджигает куски огнесмеси, раз-
брасываемые взрывом на расстояние до 20—30 м. Они
горят в течение 5 мин.
Вязкими огнесмесями, кроме ЗАБ, снаряжаются спе-
циальные зажигательные баки, которые подвешиваются
под самолет вместо бомб.
Рис. 200. Зажигательная авиабомба
1 — огнесмесы 2— патрон с фосфором; 3— патрон с разрывным зарядом
Фугасно-зажигательные авиабомбы
(ФЗАБ) применяются для поражения огнем и фугас-
ным действием промышленных сооружений, нефтехра-
нилищ и т. и. Обычно ФЗАБ (рис. 201) снаряжена по-
рошкообразным пиротехническим составом /, зарядом
тротила 2, тетриловыми шашками 3 и термитными пат-
ронами 4. В донное очко бомбы ввертывается взрыва-
тель ударного действия Время срабатывания взрыва-
теля устанавливается с таким расчетом, чтобы к момен-
ту взрыва бомба проникла внутрь сооружения. При
срабатывании взрывателя происходит взрыв снаряже-
ния бомбы, воспламеняются и разбрасываются термит-
ные патроны, которые создают отдельные очаги пожара.
Противолодочные авиабомбы (ПЛЛБ)
предназначены для поражения подводных лодок, нахо-
дящихся в надводном и подводном положениях. Для
313
314
действия по подводным лодкам могут использоваться
Два типа ПЛАБ: мелкого калибра, рассчитанные на
прямое попадайие в лодку, и крупных калибров, спо-
собные поражать лодки не только при прямохм попада-
нии, но и при взрыве в воде, вблизи корпуса лодки.
Бомбометание мелкими ПЛАБ производится по площа-
ди с помощью кассет многоразового применения.
Противолодочные бомбы крупных калибров отлича-
ются от обычных ФАБ повышенным коэффициентом
наполнения. Для их подрыва используются дистанцион-
ные и неконтактные взрыватели. Первые подрывают
бомбы в воде на заданной глубине, а вторые — при дви-
жении бомбы около лодки, на расстоянии не превы-
шающем радиуса действия взрывателя. Поражение
лодки при неконтактном взрыве обеспечивается дейст-
вием на нее ударной волны, распространяющейся в
воде.
§ 60. АВИАБОМБЫ СПЕЦИАЛЬНОГО И ВСПОМОГАТЕЛЬНОГО
НАЗНАЧЕНИЯ
Фотографические авиабомбы (ФОТАБ)
предназначены для освещения местности при ночном
воздушном фотографировании. Изготовляются ФОТАБ
калибров 100 и 250 кг. Их задачей является создание
в воздухе, на определенной высоте, мощной кратковре-
менной световой вспышки. Снаряжаются ФОТАБ
(рис. 202) порошкообразным алюминиево-магииевым
сплавом 1, называемым фотосмесью. Для воспламене-
ния фотосмеси и разрушения корпуса бомбы применяет-
ся воспламенительно-разрывной заряд 2, составленный
из смеси черного пороха и порошка сплава алюминия
с магнием. Снаряжение ФОТАБ приводится в действие
дистанционными взрывателями, срабатывающими в воз-
духе через заранее установленное время после сбрасы-
вания бомбы с самолета. Взрывной импульс от взрыва-
теля через детонирующий шнур, протянутый вдоль оси
бомбы, передается воспламенительно-разрывному заряду.
Взрывом этого заряда разрушается корпус бомбы, раз-
брасывается и воспламеняется фотосмесь. При сраба-
тывании ФОТАБ калибра 100 кг создается вспышка,
сила света которой более 2 млрд, свечей, а продолжи-
тельность— около 0,2 сек.
315
Рис. 202. Фотографическая авцабомба:
фотосмесь; 2 — воспламеннтельно-разрывной заряд
Дымовые авиабомбы (ДАБ) предназначены
для постановки дымовых завес с целью маскировки
действий своих войск или ослепления огневой системы
противника. ДАБ имеют калибр 100 кг. По внешнему
виду они не отличаются от типовых фугасных и оско-
лочных бомб. Снаряжение ДАБ состоит из фосфора и
небольшого разрывного заряда, который при срабаты-
вании взрывателя разрушает корпус бомбы, дробит и
разбрасывает фосфор. При горении фосфора образуется
густой туман, создающий дымовую завесу.
Имитационные авиабомбы (Р1АБ) предна*
значены для условного обозначения взрыва ядерных
бомб при обучении войск действиям в условиях ядер-
ной войны. Снаряжение ИАБ составляется из жидкого
горючего, фосфора и разрывного заряда. Жидкое горю-
чее служит для имитации огненной сферы ядерного
взрыва, а фосфор—для имитации дымового грибовид-
ного облака. Разрывной заряд разрушает корпус бом-
бы, разбрасывает и воспламеняет ее снаряжение. Для
имитации воздушного ядерного взрыва применяются
дистанционные взрыватели, а наземного взрыва —
взрыватели ударного действия.
Практические авиабомбы (П) применяются
для обучения летного состава бомбометанию. Внутри
корпуса бомбы (рис. 203) закреплена центральная тру-
ба 1, в которую вставляются трассер 2 и универсаль*
ный патрон 3, предназначенный для разрыва корпуса и
создания световой вспышки в точке падения бомбы на
землю при бомбометании в дневных и ночных условиях.
Свободный объем бомбы между универсальным патро-
ном и корпусом заполняется балластом 4 из каменно-
угольного шлака или древесной смолы. Универсальный
патрон содержит небольшой заряд ВВ 5 и заряд из
фотосмеси 6. При бомбометании ночью в бомбу ввер-
тываются два взрывателя: в головное очко — взрыва-
тель ударного действия и в донное—-дистанционная
трубка, воспламеняющая трассер на заданной высоте
от земли. Огонь при горении трассера выходи г через
специальные отверстия в дне бомбы и оставляет и воз-
духе хорошо заметный с земли след от падающей бом*
бы. Головной взрыватель срабатывает в момент встречи
с преградой и инициирует взрыв заряда ВВ. Взрывом
разрушается корпус бомбы и воспламеняется фотосмесь.
317
Вспышка фотосмеси служит хорошим ориентиром для
засечки места падения бомбы.
При бомбометании днем трассер не используется.
Вместо него в центральную трубу вставляется деревян-
ный вкладыш. В этом случае бомба снаряжается толь-
ко одним головным взрывателем. Засечка места паде-
ния бомбы в дневных условиях производится по облаку
пыли от балласта и вспышке фотосмеси.
Рис. 204. Светящая авиабомба:
/—факел; 2— парашютная система; 3 — вышибной заряд
Агитационные авиабомбы (АГИТАБ) пред-
назначены для разбрасывания агитационной литерату-
ры. По принципу действия и устройству они подобны
разовым бомбовым кассетам.
Светящие авиабомбы (САБ) предназначены
для освещения местности в ночных условиях с целью
обеспечения визуальной разведки и прицельного бомбо-
метания с помощью оптических прицелов. Изготавли-
ваются САБ калибром от 100 до 500 кг и снаряжаются
одним (рис. 204) или нескодькими осветительными фа-
келами 1 с парашютными системами 2. Факел воспла-
меняется и выбрасывается из корпуса бомбы в воздухе
на определённой высоте. Снижаясь на парашюте, факел
освещает местность в течение 5—7 мин. Для выбрасы-
вания факела в головном стакане бомбы имеется поро-
ховой вышибной заряд 3. В стакан ввертывается ди-
станционная трубка.
Ориентирно-сигнальные авиабомбы сбра-
сываются для обозначения района сбора групп са-
молетов, маршрута полета и создания на земле и воз.-
духе других сигналов.
319
Ориентирно сигнальные бомбы могут применяться в
дневных и ночных условиях. Бомбы, рассчитанные на
применение только днем, называются ДОСАБ, а но-
чью— НОСАБ и ЦОСАБ. Бомбы типа НОСАБ и
ДОСАБ действуют на земле, а типа ЦОСАБ — в воз-
духе. При срабатывании ДОСАБ на земле создается
окрашенное в тот или иной цвет дымовое облако.
НОСАБ создают на земле цветное пламя. При сраба-
тывании ЦОСАБ из корпуса бомбы в воздух выбрасы-
вается светящийся факел, который в дальнейшем сни-
жается на парашюте. Ориентирно-сигнальные бомбы
различаются по цвету дыма и огня.
320
ГЛАВА X
ВЗРЫВАТЕЛИ АВИАБОМБ
§ 61. НАЗНАЧЕНИЕ И КЛАССИФИКАЦИЯ ВЗРЫВАТЕЛЕЙ
Взрывателями называются устройства, предназна-
ченные для приведения в действие снаряжения авиа-
бомб в заданный момент времени.
В зависимости от принципа действия взрыватели
подразделяются на ударные (контактные), дистанци-
онные и неконтактные.
Ударными называются взрыватели, срабатываю-
щие при ударе о преграду. По принципу устройства ме-
ханизмов, обеспечивающих их срабатывание, они под-
разделяются на механические, пневматические и элек-
трические. Механические взрыватели срабатывают в ре-
зультате накола капсюля, а пневматические и электри-
ческие— в результате нагрева его. В пневматических
взрывателях капсюль нагревается в результате резкого
сжатия воздуха в замкнутой полости взрывателя, в
электрических — при прохождении тока через мостик
электрозапала. Ударные взрыватели являются основ-
ным типом взрывателей авиабомб. Они применяются
для снаряжения всех авиабомб основного назначения.
Дистанционными называются взрыватели, сра-
батывающие на траектории авиабомб в воздухе через
заранее установленное время после сбрасывания. От-
счет этого времени производят специальные устройства
взрывателей, называемые временными или дистанцион-
ными механизмами. По принципу действия временных
механизмов дистанционные взрыватели разделяют на
пиротехнические, механические и электрические. В пи-
321
ротехнических взрывателях отсчет времени от момента
сбрасывания бомбы до момента срабатывания взрыва-
теля производится пиротехническим составом, сгораю-
щим за определенный срок, в механических взрывате-
лях— часовыми механизмами и в электрических взры-
вателях— электрической схемой, в которой происходит
постепенный“ заряд конденсатора до заданного напря-
жения.
Дистанционные взрыватели применяются для снар.я-
жения разовых бомбовых кассет и связок, фотографи-
ческих, светящих и других типов авиабомб специаль-
ного и вспомогательного назначения.
Неконтактными называются взрыватели, сра-
батывающие вблизи цели под воздействием энергии, от-
ражаемой или излучаемой целью. Специфическим уз-
лом неконтактных взрывателей (НВ) является прием-
но-передающее устройство, которое облучает цели энер-
гией того или иного вида и принимает отраженную
энергию, по величине которой определяется момент
срабатывания — высота над поверхностью земли или
расстояние до цели в момент срабатывания. В случае
когда для работы взрывателя используется энергия, из-
лучаемая самой целью, он имеет только приемное
устройство. .
В зависимости от вида используемой энергии некон-
тактные взрыватели подразделяются на следующие
типы:
— электростатические (используют энергию элек-
трического поля);
— магнитные (используют энергию магнитного
поля);
— радиовзрыватели (используют электромагнитную
энергию в диапазоне радиоволн);
— оптические (используют электромагнитную энер-
гию в диапазоне от инфракрасных до ультрафиолето-
вых лучей);
— акустические (используют энергию звуковых ко-
лебаний) ;
- — гидродинамические (используют энергию колеба-
ния воды при движении корабля);
— вибрационные (используют энергию колебаний
грунта при движении танков, поездов и других объек-
тов боевой техники).
322
К неконтактным взрывателям принято относить также
барометрические и гидростатические взрыватели, сраба-
тывающие под воздействием среды, окружающей цель.
Действие барометрических НВ основано на зависимости
атмосферного давления от высоты над поверхностью
земли. Они срабатывают на определенной высоте, когда
атмосферное давление достигает заданного значения.
Гидростатические НВ применяются для подрыва проти-
володочных бомб на заданной глубине водоема. Их дей-
ствие основано на зависимости давления воды от глубины
погружения в воду. В настоящее время неконтактные
взрыватели применяются в бомбардировочной авиации
главным образом для снаряжения осколочно-фугасных и
противолодочных авиабомб.
Взрыватели различаются также по месту установки
их в бомбу (головные, донные, универсальные), по вре-
мени срабатывания (мгновенного действия, с замедле-
нием) и ряду других признаков, отражающих их харак-
теристики и особенности конструкции.
§ 62. ВЗРЫВАТЕЛИ УДАРНОГО ДЕЙСТВИЯ
Для снаряжения авиационных бомб чаще всего при-
меняются механические взрыватели ударного действия.
Основными узлами таких взрывателей являются: удар-
ный механизм, огневая цепь, предохранительные устрой-
ства и механизм дальнего взведения.
Ударный механизм предназначен для иниции-
рования взрыва капсюля при встрече с преградой. Во
взрывателях используются три основных типа ударных
механизмов: реакционные, инерционные и реакционно-
инерционные.
Реакционный ударный механизм (рис. 205) состоит
из ударника с жалом 1, предохранительной пружины 2
и капсюля 3. Накол жалом капсюля происходит от не-
посредственного воздействия преграды (силы реакции
преграды) на головку ударника в момент встречи с пре-
градой. Во время полета бомбы в воздухе ударник
удерживается от перемещения к капсюлю предохрани-
тельной пружиной. Полость взрывателя, в которой раз-
мещается ударник, обычно закрывается мембраной,
изолирующей его от окружающей среды. Ударные ме-
323
ханизмы реакционного действия применяются только
в головных взрывателях.
Действие инерционных ударных механизмов основа-
но на использовании сил инерции, возникающих при
Рис. 205. Реакционный ударный меха-
низм:
1 — ударник; 2 — предохранительная пружина;
3 — капсюль
Рис. 206. Инерци-
онный ударный
механизм:
1 — удариик; 2—пру-
жина; 3 — капсюль
Рис. 207. Всюдубойный
ударный механизм:
1 и 2 — инерционные ударники;
3 — жало; 4 — капсюль
Рис. 208. Реакционно-инерционный
ударный механизм:-
1 — реакционный ударник; 2 — инерцион-
ный ударник
324
Рис. 209. Пневма-
тический ударный
механизм:
/ — ударник; 2—кап-
сюль; 3 — поршень;
4 — пружина
встрече бомбы с преградой. Во взрывателях авиабомб
используются две разновидности инерционных ударных
механизмов: механизмы осевого действия и всюдубой-
ные механизмы.
Механизмы осевого действия (рис. 206) обычно ис-
пользуются в донных взрывателях. Они состоят из инер-
ционного ударника /, имеющего возможность переме-
щаться только вдоль оси взрывателя, капсюля 3 и пре-
дохранительной пружины 2. Такие механизмы надежно
срабатывают только при встрече с
преградой под углом 30° и более.
Всюдубойные механизмы приме-
няются в универсальных взрывателях.
Они надежно срабатывают при встре-
че с преградой под любым углом. Ти-
повой всюдубойный механизм (рис. 207)
состоит из двух инерционных удар-
ников 1 и 2, скользящих по опорным
коническим поверхностям. С одним
из ударников связано жало <?, а с дру-
гим— капсюль 4. Сила инерции, на-
правленная вдоль' оси механизма,
перемещает один из ударников. При
действии этой силы сбоку в дви-
жение приходят оба ударника. Сколь-
зя по коническим поверхностям, они
сближаются, и жало накалывает
капсюль.
Ударные механизмы реакционно-
инерционного действия (рис. 208) со-
стоят из двух ударников: реакцион-
ного / и инерционного 2. Такие механизмы применяют-
ся только в головных взрывателях и отличаются от ре-
акционных механизмов повышенной надежностью дей-
ствия.
Пневматический ударный механизм (рис. 209) пред-
ставляет собой разновидность реакционного и состоит
из ударника /, капсюля 2, поршня 3 и предохранитель-
ной пружины 4. Поршень с капсюлем входит в полость
ударника. При встрече с преградой происходит быстрое
перемещение ударника и сжатие воздуха в полости
перед капсюлем. Сжатый воздух нагревается и приво-
дит в действие капсюль.
325
Огневой цепью называется совокупность эле-
ментов воспламенения и детонирования, служащих для
обеспечения требуемого действия взрывателя после сра-
батывания ударного механизма. В зависимости от типа
цели, по которой сбрасываются бомбы, взрыватель дол-
жен произвести либо мгновенный подрыв, либо подрыв
с некоторой задержкой по времени — с замедлением.
В зависимости от време-
ни действия ударные взры-
ватели бывают мгновенного
действия и с замедлением.
К взрывателям мгновенного
действия принято относить
взрыватели, у которых
замедление не превышает
0,001 сек.
Простейшая огневая цепь
взрывателей мгновенного
действия состоит из двух
элементов: капсюля-детона-
тора накольного типа и де-
тонатора. Накольный кап-
сюль (рис. 210) срабатывает
при наколе жалом и вызы-
вает взрыв детонатора, роль
которого выполняет шашка
бризантного ВВ—-тетрила.
Детонаторная шашка усили-
вает взрывной импульс кап-
сюля, передаваемый заряду
бомбы. Во взрывателях, со-
огневой импульс, вместо кап-
Рис. 2W. Накольный капсюль:
1 — колпачок; 2 — чашечка; 3 — на-
польный состав; 4 — азид свинца;
5 — тетрил
общающих заряду бомбы
сюля-детонатора используется капсюль-воспламенитель,
а вместо детонаторной шашки—-пороховая петарда.
Более сложная огневая цепь взрывателей мгновен-
ного действия содержит три элемента: капсюль-воспла-
менитель, капсюль-детонатор лучевого действия и дето-
натор. Первый капсюль срабатывает при наколе жалом
и лучом огня вызывает взрыв капсюля-детонатора,
а второй — взрыв детонатора.
Капсюль-воспламенитель снаряжается ударным со-
ставом, представляющим собой смесь гремучей ртути,
бертолетовой соли и антимония.
326
Капсюль-детонатор лучевого действия (рис. 211) от-
личается от накольного капсюля устройством чашечки
и снаряжением. Чашечка лучевого капсюля имеет от-
верстие, прикрытое шелковой сеткой 1, через которое
проходит луч. огня. Снаряжение капсюля составлено из
слоя азида свинца 3 и слоя тетрила 4.
Огневая цепь взрывателей с замедлением состоит из
капсюля-воспламенителя, замедлителя, капсюля-детона-
тора и детонатора. Замедлитель передает луч огня ог
Рис. 211. Капсюль-дето-
иатор лучевого действия:
/ — шелковая сетка; 2-*
ТИРС; 3 — азид свинца; 4 —
тетрил
Рис. 212. Схема за медлительного
устройства;
/ — втулка; 2, 3 и 4 — каналы для про-
хода луча огня; 5 — капсюль-воспламени-
тель; 6 — капсюль-детонатор; 7 — устано-
вочные винты
первого капсюля ко второму за некоторый промежуток
времени. В зависимости от назначения взрывателя ве-
личина замедления может быть от сотых долей секунды
до нескольких минут. Замедление обеспечивается сгора-
нием соответствующих запрессовок либо из обыкновен-
ного черного пороха, либо из малогазовых составов.
Взрыватели фугасных авиабомб обычно имеют из-
меняемое замедление. Установка замедления произво-
дится в соответствии с характером цели, по которой
предполагается сбрасывать бомбы. Замедлительное
устройство на три различных замедления (рис. 212) со-
стоит из втулки 1, в которой имеются каналы 2, 3, 4
для прохода луча огня от капсюля-воспламенителя 5
к капсюлю-детонатору 6. В центральный канал 2 за-
327
прессовывается состав, обеспечивающий наибольшее
замедление. При проходе луча огня по каналу 3 замед-
ление меньше Третий канал 4 служит для быстрого
прохождения луча огня (минуя замедлители) и обеспе-
чивает мгновенное действие взрыва-
теля. Каналы меньшего замедления и
мгновенного действия перекрыты уста-
новочными винтами 7. Если эти винты
ввернуты, взрыватель срабатывает с
наибольшим замедлением. Для уста-
новки взрывателя на мгновенное дей-
ствие или меньшее замедление необ-
ходимо вывернуть соответствующий
винт.
Предохранительные уст-
ройства обеспечивают безопасность
при транспортировке взрывателей, слу-
жебном обращении с ними и боевом
применении. Безопасность современ-
ных взрывателей обычно достигается
посредством разрыва их боевой цепи.
В общем случае боевая цепь взрыва-
теля состоит из следующих элементов
(рис. 213): ударника 1, капсюля-вос-
пламенителя 2, замедлителя 3, кап-
сюля-детонатора 4, передаточного за-
ряда 5 и детонатора 6. Чтобы взрыва-
тель не сработал, достаточно выклю-
чить из этой цепи любой элемент. Вы-
ключение капсюлей и передаточных
зарядов чаще всего производится сме-
щением их в сторону, а выключение
ударника — введением стопоров 7, препятствующих его
перемещению.
По степени безопасности при служебном обращении
взрыватели делятся на непредохранительные, полупре-
дохранительные и предохранительные. В непредохрани-
'тельных взрывателях капсюль-воспламенитель и кап-
сюль-детонатор не изолируются от детонатора. Поэтому
при случайном срабатывании одного из капсюлей про-
изойдет взрыв детонатора. В полупредохранительных
взрывателях капсюль-воспламенитель до момента взве-
дения изолируется от капсюля-детонатора. Во взрыва-
Рис. 213. Схема
боевой цепи взры-
вателя:
1 — ударник: 2 —
капсюль-воспламени-
тель; 3 — замедли-
тель: 4 — капсюль-
детонатор; 5 — пере-
даточный заряд; 6 —
детонатор; 7 — сто-
пор
328
телях предохранительного типа оба капсюля изолирова-
ны от детонатора. Поэтому случайное срабатывание
любого капсюля не влечет за собой взрыва детонатора.
Механизмы дальнего взведения (МДВ)
снимают взрыватель с предохранителей (взводят взры-
ватель) через определенное время после сбрасывания
бомбы. Величина этого времени называется временем
дальнего взведения взрывателя и выбирается из условий
безопасности бомбометания. За время взведения самолет
должен удалиться от бомбы на безопасное расстояние.
МДВ обеспечивает экипажу безопасность в случае
преждевременного срабатывания взрывателя, которое
может произойти, например, при столкновении бомб,
сброшенных залпом.
Время дальнего взведения ограничивает минимально
допустимые высоты бомбометания. Чтобы взрыватель
сработал, это время не должно быть больше времени
падения бомбы с высоты бомбометания. Если бомбу
сбросить с высоты, меньшей минимально допустимой,
МДВ не успеет снять взрыватель с предохранителей и
бомба не взорвется.
Механизмы дальнего взведения, как правило, состоят
из трех основных частей:
— пускового устройства, срабатывание которого оп-
ределяет момент начала работы МДВ;
— замедлительного устройства, определяющего вре-
мя взведения взрывателя;
— устройства, приводящего детали взрывателя в
боевое положение.
В зависимости от замедлительного устройства МДВ
подразделяются на пиротехнические, механические и
электрические. В современных взрывателях авиабомб
чаще всего применяются пиротехнические МДВ, время
работы которых определяется временем сгорания за-
прессовки из пиротехнического состава. Пиротехниче-
ские МДВ приводятся в действйе либо накольными
(стреляющими) механизмами, либо электрическими уст-
ройствами, воспламеняющими пиротехнический состав
в момент сбрасывания бомбы. Пусковые устройства
МДВ дают возможность производить сбрасывание бомб
на взрыв и невзрыв.
На рис. 214 приведен взрыватель ударного действия
с пиротехническим МДВ и пусковым устройством меха-
12—320
329
нического типа. Всюдубойный ударный механизм взры-
вателя состоит из двух инерционных ударников 1 и 2,
жала 3 и капсюля-воспламенителя 4. Ударный меха-
низм дополнен реакционным ударником, состоящим из
папиросы 5 и грибка 6. Внутренняя полость взрывателя
сверху закрыта мембраной 7.
Капсюль-воспламенитель установлен в движке <5, за-
нимающем до момента взведения положение, при кото-
ром капсюль находится в стороне от жала. В таком по-
ложении движок удерживается самим жалом, препят-
ствующим его движению под действием сжатой пружи-
ны 9. Пружина 10 стремится поднять жало и освобо-
дить таким образом движок. Однако этому препятствует
опущенная вниз папироса, которую удерживает шпиль-
ка 11 механизма дальнего взведения. В шпильку вставлен
вышибной заряд 12 из ТНРС. Кроме шпильки, к МДВ от-
носится втулка 13, в дуговой капал которой запрессован
замедлительный состав. Время горения этого состава
определяет время дальнего взведения взрывателя.
Пусковым устройством МДВ служит стреляющий
механизм, состоящий из ударника 14, пружины 15, серь-
ги 16 и капсюля-воспламенителя 17. Под действием
сжатой пружины 15 ударник стремится наколоть кап-
сюль 17. Движению ударника препятствует серьга, лап-
ки которой обхватывают шаровую головку ударника.
При хранении взрывателя серьга закрывается предо-
хранительным колпачком 18.
В нижней части взрывателя имеется замедлительное
устройство, позволяющее устанавливать взрыватель на
мгновенное действие или на малое замедление 0,03 сек.
Взрыватель выпускается заводом с установкой на за-
медление 0,75 сек. В полости взрывателя против шпиль-
ки МДВ размещается стопорный механизм, исключаю-
щий срабатывание взрывателя при случайном срыве,
бомбы с самолета на стоянке, при взлете или посадке.
Стопорный механизм состоит из двух конусов 19 и 20,
штока 21, пружины 22, фиксатора 23 и предохранитель-
ного винта.
В момент удара бомбы о преграду после срыва ее
с самолета конусы 19 и 20 под действием инерционных
сил сближаются, фиксатор 23, заскакивает в выточку
конуса 20 и удерживает конусы, не давая им возмож-
ности вернуться в исходное положение. Сблизившиеся
330
Рис. 214. Взрыватель ударного действия:
7 и 2— инерционные ударники;-3— жало; 4— капсюль-воспламенитель; 5 —
папироса; 6 — грибок; 7— мембрана; 8—движок; 9—пружина движка; 10 —
пружина жала; 11 — шпилька; 12 — заряд ТНРС; 13 — втулка с замедлитель-
ным составом; 14 — ударник; 15 — пружина; 16 — серьга; 17 — капсюль-вос-
пламенитель; 18 — колпачок; 19 и 20 — конуса стопорного механизма; 21 —
шток; 22 — пружина; 23 — фиксатор; 24 — предохранительный винт
12*
331
конуса закрывают полость, в которую выбивается при
взведении взрывателя шпилька 11.
Стопорный механизм не допускает взведения взры-
вателя в тех случаях, когда время падения бомбы мень-
ше времени дальнего взведения. Для предупрежде-
ния сближения конусов во время обращения со взрыва-
телем в него ввернут удлиненным концом предохрани-
тельный винт 24. В процессе подготовки взрывателя
к боевому применению предохранительный винт вывер-
тывают и вновь устанавливают в то же отверстие ко-
ротким концом.
Описанный выше взрыватель применяется для сна-
ряжения фугасных, осколочно-фугасных и зажигатель-
ных авиабомб. Наличие всюдубойного ударного меха-
низма позволяет устанавливать его в любое очко бом-
бы. После ввертывания взрывателя в бомбу серьга
МДВ соединяется с карабином троса замка «Взрыв —
Невзрыв». При сбрасывании бомбы на взрыв трос оста-
ется на самолете и под действием веса отделяющейся
бомбы срывает серьгу МДВ. Стреляющий механизм
накалывает капсюль-воспламенитель 17, который под-
жигает замедлительный состав, запрессованный во
втулке 13. После выгорания этого состава взрывается
вышибной заряд 12. Давлением газов шпилька выби-
вается из папиросы в полость между конусами стопор-
ногЬ механизма. Папироса, жало и верхний конус удар-
ного механизма под действием пружины поднимаются
вверх. Как только жало выйдет из зацепления с движ-
ком 8, последний под действием своей пружины пере-
мещается в боевое положение (капсюль-воспламенитель
устанавливается под жалом). В боевом положении дви-
жок удерживается специальным фиксатором.
Ввернутый в головное очко бомбы взрыватель сра-
батывает от силы реакции преграды, действующей через
грибок на папиросу и жало, и от силы инерции, дейст-
вующей на нижний конус. Ввернутый в донное очко бом*
бы взрыватель срабатывает под действием сил инер-
ции, которые перемещают папиросу, верхний конус и
жало. При боковом ударе бомбы о преграду срабаты-
вание взрывателя происходит в результате сближения
конусов ударного механизма.
При сбрасывании на невзрыв вместе с бомбой сбра-
сывается трос замка «Взрыв — Невзрыв» и серьга МДВ
332
не срывается. В этом случае взрыватель не взводится
и не срабатывает.
Электрическое пусковое устройство взрывателей
(ЭПУ) состоит из токопроводящего жгута 1 (рис. 215),
многожильного провода 2, шариковой вилки 3 и элек-
тровоспламенителя 4. Шариковая вилка разделена изо-
лятором 5 на две контактирующие полусферы, к одной
из которых припаян провод 2, а к другой — металличе-
ская оплетка жгута. С противоположного конца провод
и оплетка связана с электровоспламенителем.
Мостиком накаливания 6 служит нихромовая прово-
лочка, припаянная посредине к центральному контак-
ту 8, а концами — к чашечке 7. Центральный контакт
мостика припаивается к многожильному проводу ЭПУ,
а чашечка мостика -— к оплетке жгута. Электровоспла-
менитель размещается во втулке 11, которая вверты-
вается в корпус взрывателя вместо стреляющего меха-
низма. После ввертывания взрывателя в бомбу шарико-
вая вилка ЭПУ вставляется в рейку электрической си-
стемы управления взрывателями на самолете. При сбра-
сывании бомбы на взрыв в электровоспламенитель через
шариковую вилку и жгут подается импульс тока. Элек-
тровоспламенитель срабатывает и поджигает замедли-
тельный состав МДВ. При сбрасывании на невзрыв им-
пульс тока не подается.
В старых взрывателях авиабомб, разработанных до
и в период Великой Отечественной войны, в качестве
механизмов дальнего взведения использовались ветрян-
ки. Типичным представителем таких взрывателей может
служить взрыватель АПУВ (рис. 216) с пневматиче-
ским ударным механизмом. До момента взведения в
ударник взрывателя 1 ввернут винт 2, связанный с вет-
рянкой и колпачком 3. Этот винт не позволяет удар-
нику перемещаться относительно поршня 4.
После ввертывания взрывателя в бомбу между ло-
пастями ветрянки вставлялась проволочная вилка, кото-
рая связывалась тросом или прутком с замком
«Взрыв — Невзрыв». При сбрасывании бомбы на взрыв
вилка вместе с тросом оставалась на самолете. При
падении бомбы набегающий воздушный поток свинчи-
вал колпачок с ветрянкой и взрыватель взводился. Вре-
мя его взведения зависело от скорости воздушного по-
тока, т. е. скорости самолета при бомбометании. При
333
4
10
Рис. 215. Электрическое пусковое устройство (ЭПУ) взрывателей:
/ — жгут; 2 — многожильный провод; 3 —шариковая вилка; 4 — электровоспламенитель; 5 — изолятор; 6 — мостик накалива-
ния; 7— чашечка мостика; 8 — центральный контакт мостика; 9— воспламенительный состав; 10— изолятор; 11 втулка
Г
Г-'
малых скоростях это время было достаточным для того,
чтобы обезопасить самолет. Однако при бомбометании
с современных самолетов ветрянка свинчивается прак-
тически сразу же после выхода бомбы из бомбоотсека,
и дальнего взведения взрывателя це получается. Кроме
того, возможно попадание ветрянки в собственный са-
молет и его повреждение. По этим причинам старые
взрыватели типа АПУВ-1,
Рис. 217. Механизм дальнего взве-
дения:
/ — стреляющий* механизм; 2 — стойка;
3 —- замедлйтельный состав; 4 — вышиб-
ной заряд; 5 — кольцо
»
АМ-А, АВ-1, ТМ-24 допол-
няются ’ ‘специальными
устройствами, также
называемыми механиз-
мами дальнего взве-
дения.
Механизм дальнего
взведения этого типа
(рис. 217) состоит из
стреляющего механиз-
ма /, стойки 2 с замед-
лительным составом 3,
вышибного заряда 4 и
кольца 5. В кольцо 5
вставляется стакан
взрывателя так, чтобы
стойка 2 входила в
промежуток между дву-
мя лопастями ветрян-
ки и препятствовала
ее вращению. Вместе
с МДВ взрыватель
ввертывается в бомбу.
Серьга стреляющего
механизма соединяется с карабином троса «Взрыв —
Невзрыв».
При сбрасывании бомбы на взрыв трос срывает
серьгу, после чего срабатывает стреляющий механизм и
воспламеняется замедлительный состав 3. По выгора-
нии этого состава взрывается вышибной заряд, срезаю-
щий резьбу, с помощью которой стойка крепится к коль-
цу. Ветрянка при этом расконтривается, и после сверты-
вания ее, взрыватель взводится.
В некоторых взрывателях ветрянки используются в
качестве пусковых устройств МДВ. Примером таких
взрывателей может служить донный взрыватель проти-
336
Рис. 218. Взрыватель противотанковых авиабомб:
1 — колпачок; 2 — шпилька; 3 — инерционный ударник; 4 — капсюль
воспламенитель; 5 — центробежные стопора; 6 — жало ударника; 7
двиткок; 3— замедлйтельный состав; 9— пружины, Ю — жало; и
капсюль-детонатор
вотанковых авиабомб (рис. 218). С колпачком ветрян-
ки 1 этого взрывателя связана шпилька 2, которая вхо-
дит в вертикальный канал инерционного ударника 3.
Нижний конец шпильки служит упором для капсюля-
воспламенителя 4, на который давит сжатая пружина.
Колпачок ветрянки удерживается на взрывателе цен-
тробежными стопорами 5. Они входят в расточку го-
ловки ударника и препятствуют его движению. Жало 6
инерционного ударника смещено относительно капсюля-
детонатора И. Движок 7, в котором укреплено жало,
упирается в замедлительный состав 8, запрессованный
в вертикальный канал ударника. После выбрасывания
бомбы из- кассеты ветрянка с колпачком и центробеж-
ными стопорами под действием воздушного потока на-
чинает вращаться. По достижении определенного числа
оборотов центробежные стопоры, на которые действуют
центробежные силы, сжимают пружины 9 и расцепля-
ются с ударником. Ничем не удерживаемый колпачок
ветрянки срывается воздушным потоком вместе со
шпилькой 2 с головки взрывателя и отделяется от него.
Освободившийся от шпильки капсюль-воспламенитель 4
под действием своей пружины накалывается на жа-
ло 10. Луч огня капсюля воспламеняет замедлительный
состав 8 механизма дальнего взведения. После выгора-
ния этого состава сжатая пружина перемещает дви-
жок 7 с жалом 6 в боевое положение. При встрече
бомбы с преградой инерционная сила перемещает удар-
ник и жало накалывает капсюль-детонатор 11.
§ 63. ВЗРЫВАТЕЛИ ДИСТАНЦИОННОГО ДЕЙСТВИЯ
Для снаряжения современных авиабомб применяют-
ся дистанционные взрыватели только механического
типа. Дистанционным механизмом (рис. 219) таких
взрывателей служит часовой механизм, который через
заданное время после сбрасывания бомбы освобождает
стреляющее устройство, накалывающее капсюль.
Часовой механизм взрывателя состоит из бараба-
на 1 с пружиной 2, системы зубчатых колес и регуля-
тора. Пружина является двигателем часового механиз-
ма. Один конец ее жестко закреплен на центральной
оси 3, а другой — на барабане. Пружину заводят вра-
щением барабана, который затем стопорится специаль-
338
ной защелкой, препятствующей обратному движению
барабана. Регулятор часового механизма состоит из
ходового колеса 4, баланса 5 с грузиками, волоска 6
и якоря 7.
Стреляющее устройство взрывателя включает пру-
жину <5 и стрелу 9 с жалом 10. Стрела с помощью шли-
цевого соединения сцепляется с центральной осью 3 и
Рис. 219. Кинематическая схема дистанционного механизма взрыва-
теля ТМ-24:
/ — барабан; 2— пружина; 3— центральная ось; 4 — ходовое колесо; 5 — ба-
ланс; 6— волосок; 7 — якорь; 8 — пружина; 5 — стрела; 10— жало; 11 — кап-
,ск>ль; 12 — скоба; 13 — диафрагма; 14 — пусковой стопор; 15 — тарель; 76 —
стержень; 17 — предохранительная внлка; 19 — предохранительный стопор;
20 — шарик
«три работе часового механизма вращается вместе с ней.
Сжатая пружина 8 стремится переместить стрелу с жа-
лом к капсюлю 11. Такому перемещению стрелы пре-
пятствует скоба 12, на которую она опирается узким
концом. Между стрелой и капсюлем установлена диа-
фрагма 13 с фигурной прорезью по форме стрелы. Ча-
совой механизм взрывателя стопорится пусковым
339
стопором 14, препятствующим вращению стрелы верх-
ней частью пусковой стопор упирается в тарель 15, с ко-
торой жестко связан стержень 16. Стержень входит вго-
Рис. 220. Взрыватель ТМ 24?
16— стержень; 17—предохранительная вилка; 18—пу-
сковая чека; 19— предохранительный стопор; 20 — шарнк;
21 — колпачок ветрянки; 22 — установочный колпак; 23 —
соединительное кольцо; 24 — корпус взрывателя
ловку взрывателя (рис. 220), в которую вставляются
предохранительная вилка 17 и пусковая чека 18. Пре-
дохранительная вилка не дает возможности тарели со
стержнем подняться вверх. Вилка удаляется после
340
ввертывания взрывателя в бомбу, после чего стержень
удерживается от подъема пусковой чекой, которая свя-
зывается с карабином троса или прутка замка «Взрыв —
Невзрыв».
На пути движения стрелы после ее схода со скобы
установлен дополнительный предохранительный сто-
пор 19. Верхним концом он упирается в шарик 20, ко-
торый в свою очередь упирается в колпачок ветрян-
ки 21.
При сбрасывании бомбы с самолета ветрянка осво-
бождается от контровочной вилки и пусковая чека 18
вытаскивается. Под действием своей пружины пусковой
стопор 14 (рис. 219) вместе с тарелью и связанным
с ней стержнем 16 поднимается вверх, освобождая
стрелу.
Стрела начинает вращаться, скользя по скобе 12.
За время движения стрелы по скобе ветрянка сверты-
вается и отделяется от взрывателя. Шарик освобож-
дает предохранительный стопор, который под действием
пружины поднимается вверх, давая возможность стреле
продолжать движение после схода ее со скобы. Через
5—6 сек стрела под действием пружины 8 соскакивает
со скобы на диафрагму и при дальнейшем движении
скользит по ней. Взрыватель срабатывает в момент
совпадения стрелы с фигурной прорезью диафраг-
мы. Под действием сжатой пружины стрела проска-
кивает в прорезь диафрагмы и жало накалывает кап-
сюль.
Время действия взрывателя ТМ-24 может изме-
няться от 6 до 60 сек. Установка времени действия про-
изводится перед ввертыванием взрывателя в бомбу
поворотом установочного колпака 22 (рис. 220), в кото-
ром находится часовой механизм, относительно соеди-
нительного кольца 23, жестко связанного с корпусом
взрывателя 24, в котором укреплена диафрагма. По-
этому при повороте часового механизма будет изме-
няться угол между стрелой и прорезью диафрагмы. Чем
больший угол будет составлять стрела с прорезью, тем
через большее время сработает взрыватель. Для уста-
новки взрывателя на заданное время па установочном
колпаке нанесена шкала времени, а па соединительном
кольце — установочная риска. Взрыватель выпускается
с завода и хранится на складах с установкой на индек-
341
се «П» — на предохранитель. При такой установке ско-
ба перекрывает часть фигурной прорези диафрагмы и
стрела не может проскочить в прорезь.
Предохранительный стопор 19 и шарик 20 исклю-
чают срабатывание взрывателя в случае, если бомба
застрянет в бомбовом отсеке самолета, так как ветрян-
ка не успевает свернуться и предохранительный стопор
не поднимется вверх.
При’ ввертывании в бомбу взрывателя с механизмом
дальнего взведения МДВ-4 свертывание ветрянки начи-
нается после срабатывания МДВ.
Взрыватели ТМ-24, как и некоторые другие типы
взрывателей, выпускаются в двух вариантах: ТМ-24А
и ТМ-24Б. Взрыватели с индексом «А» создают взрыв-
ной, а взрыватели с индексом «Б» — огневой импульс.
В новейших образцах дистанционных взрывателей вме-
сто механического пускового устройства (ветрянки)
применяется электрическое пусковое устройство (ЭПУ),
не отличающееся от ЭПУ ударных взрывателей.
§ 64. НЕКОНТАКТНЫЕ ВЗРЫВАТЕЛИ
В настоящее время для снаряжения авиационных
бомб наибольшее применение находят два типа НВ:
радио- и оптические взрыватели.
Действие радиовзрывателей (РВ) основа-
но на использовании эффекта Допплера. Радиоблок
взрывателя (рис. 221) составляю^: генератор высокой
частоты, антенна (А), антенный колебательный контур,
детектор, усилитель низких частот и тиратронное реле.
Генератор высокой частоты генерирует синусоидальные
электрические колебания, амплитуда и частота которых
постоянны. Эти колебания через колебательный контур
поступают в антенну и излучаются ею в виде радиоволн
в направлении полета бомбы. Достигнув поверхности
земли, радиоволны отражаются от нее и, пройдя обрат-
ный путь, воздействуют на антенну РВ. Отраженные
волны наводят в антенне высокочастотную э. д. с., ко-
торая поступает в колебательный контур и складывается
с действующими в нем колебаниями генератора. От-
раженные колебания отличаются от колебаний генера-
тора по амплитуде и частоте. Из-за рассеяния радио-
волн они обладают значительно меньшей амплитудой,
342
величина которой зависит
от высоты над поверхностью
земли.
Частота отраженных коле-
баний f2 превышает частоту
генератора fi на величину F,
пропорциональную скорости
падения авиабрмбы. Измене-
ние частоты отраженных коле-
баний обусловлено скоростью
сближения бомбы с поверхно-
стью земли. Подобное явление
известно в физике под назва-
нием эффекта Допплера. Ве-
личина F, на которую изме-
няется частота, называется
частотой Допплера.Чис-
ленное значение ее опреде-
ляется по формуле:
2?>
<96>
где v — скорость бомбы;
X — длина волны генера-
тора;
6С — угол встречи бомбы с
поверхностью земли.
В результате сложения от-
раженных колебаний с коле-
баниями генератора в антен-
ном колебательном контуре
возникают биения —колебания,
модулированные по амплиту-
де. Амплитуда (огибающая)
результирующих колебаний из-
меняется по синусоидальному
закону с частотой Допплера,
являющейся разностью ча-
стот f2— fi складываемых ко-
лебаний.
Детектор выделяет огибаю-
щую этих колебаний, кото-
рая для схемы РВ является
Рис. 221. Блок-схема радиовзрывателя
343
рабочим сигналом. Амплитуда рабочего сигнала про-
порциональна амплитуде отраженных колебаний и,
следовательно, зависит от высоты. По мере сближения
бомбы с-землей амплитуда рабочего сигнала непрерывно
увеличивается.
Рабочий сигнал поступает в усилитель низкой часто-
ты и после усиления воздействует на тиратронное реле.
На заданной высоте, когда амплитуда сигнала дости-
гает определенного значения, тиратронное реле замы-
кает цепь электрозапала и взрыватель срабатывает.
Антенной 1 радиовзрывателя (рис. 222) служит метал-
лическое кольцо, изолированное от стального корпуса 2.
В полости головки РВ установлена колодка 3 с радио-
деталями высокочастотного блока, а под ней — колод-
ка 4 с деталями низкочастотного блока.
Источником питания схемы взрывателя является
магнито-электрический генератор переменного тока,
установленный в средней части взрывателя. Ротор ге-
нератора представляет собой постоянный магнит в фор-
ме диска, ось которого через промежуточную ось 8
сцеплена с осью вращения ветрянки 9. Нижний конец
оси ротора связан с червячным редуктором 10.
Редуктор служит для передачи вращения от ветрян-
ки к оси малой скорости 11, осуществляющей дальнее
взведение взрывателя. С помощью редуктора число
оборотов оси малой скорости уменьшается в 7802 раза
по сравнению со скоростью вращения ветрянки. Снизу
ось малой скорости сцеплена штифтом 12 с запальной
колодкой 13, в которой установлен электрозапал 14 и
капсюль-детонатор 15. До момента взведения взрыва-
теля запальная колодка занимает положение, при кото-
ром детонатор 15 находится в стороне от передаточного
заряда 16. В стакане взрывателя над запальной колод-
кой установлены конденсаторы 17 фильтра источника
питания.
При служебном обращении с взрывателем ветрянка
контрится капроновой нитью 18, связанной с проволоч-
ной серьгой 19, которая мо?кет быть сцеплена с караби-
ном прутка «Взрыв — Невзрыв». Нить разрывается при
сбрасывании бомбы на взрыв.
Ветрянка вращается во время падения бомбы. Вра-
щение от нее передается ротору генератора и через ре-
дуктор— оси малой скорости. С обмоток 7 генератора
344
Рис. 222. Устройство
радиовзрывателя:
1 — антенна; 2 — корпус;
3 и 4 — колодки; 5 — .
статор; 6 — ротор; 7 —
обмотки; 8 — промежу-
точная .ось; 9—ветрян-
ка; /0 —редуктор; // -
ось малой скорости; /? —
штифт; 13 — запальная
колодка; /•/ электро-
запал; /5 — капсюль-де-
топа гор; 16 — порода соч-
ный заряд; 17 — кондеи-
са торы; 18 — капроновая
пить; 19 — серы 1
345
•* *
снимаются переменные напряжения 1,35 в и 135 в. На
пряжение 1,35 в накаливает нити электронных ламп,
а напряжение 135 в (после выпрямления и фильтра-
ции) питает анодные цепи радиосхемы.
Рис. 223. Принципиальная схема оптиче-
ского взрывателя:'
7— объектив передатчика; 2 — источник энергии;
3—модулирующий диск; 4 — объектив приемника
При повороте оси малой скорости поворачивается
запальная колодка. Взведение взрывателя происходит
после поворота ее на определенный угол. В момент
взведения штифт 12 под воздействием своей пружины
выходит из зацепления с осью малой скорости и за-
пальная колодка останавливается, хотя ось продолжает
вращаться.
346
Описанный выше радиовзрыватель предназначен
для снаряжения осколочно-фугасных авиабомб в голов-
ное очко. Высота срабатывания взрывателя зависит от
типа преграды.
Оптический взрыватель для авиабомб
(рис. 223) имеет передатчик и приемник лучистой
энергии.
Основными элементами передатчика являются: объ-
ектив 1, источник лучистой энергии 2 и модулирующий
диск 3. Источником лучистой энергии служит лампочка
накаливания, установленная в _____
фокальной плоскости объектива. V у
Энергия лампочки фокусируется \ /
объективом в узкий световой пу-
чок, который направляется к / ]
преграде, освещая на ней неко- I I
торую площадку 50. От этой пло- \ ^*'*''4
щадки происходит рассеянное / \
отражение лучистого потока. / \
Модулирующий диск (рис. 224) ---*
представляет собой четырехло- Рис. 224. Модулирующий
пастную звездочку, которая при диск
работе взрывателя приводится
во вращение ветрянкой. Диск устанавливается между
лампочкой и объективом так, что вырезы диска распо-
лагаются против лампочки. Поэтому ее энергия попадет
на объектив только в то время, когда против лампочки
находится один из вырезов диска. Таким образом, пере-
датчик будет излучать энергию в виде отдельных им-
пульсов. Частота посылки импульсов зависит от скоро-
сти вращения диска.
Модуляция лучистого потока применяется для того,
чтобы приемник взрывателя мог отделить поток пере-
датчика, отражаемый преградой, от постоянного по ин-
тенсивности потока солнечных лучей.
Основными элементами приемника являются объек-
тив 4, фотосопротивление R$ и преобразующая схема
(рис. 223). Фотосопротивление устанавливается в фо-
кальной плоскости объектива 4, который по форме
и размерам не отличается от объектива 1. Ширина
поля зрения приемника равна ширине пучка, в кото-
рый сфокусирован лучистый поток объективом пере-
датчика. >
347
Рис. 225. Устройство оп-
тического взрывателя:
/ — передатчик; 2 — прием-
ник; 3 — генератор; 4 — тур-
бинка; 5 — модулирующий
диск; 6 — стакан
Преобразующая схема приемника имеет источник
питания £, фотосопротивление /?ф и нагрузочное сопро-
тивление R, которое через разделительный конд< и< ।
тор С связано со входом усилителя. Когда на фотосо-
противление не действует переменный во времени
лучистый поток, в схеме приемника от источника пита-
ния Е через сопротивления /?ф и R будет течь постоян-
ный. ток. Выделяемое при этом на сопротивлении R
постоянное напряжение не будет передаваться чере <
конденсатор С на вход усилителя.
При сближении с преградой часть освещенной пло-
щадки So преграды будет находиться в поле зрения
приемника. Лучистый поток, отражаемый с этой части
площадки, попадает на объектив приемника и направ-
ляется им на фотосопротивление. Под воздействием из-
меняющегося во времени лучистого потока происходит
периодическое изменение сопротивления R,p, что приво-
дит к периодическому изменению напряжения на сопро-
тивлении R. Переменная составляющая этого напряже-
ния передается через разделительный конденсатор С на
вход усилителя и служит для взрывателя рабочим сиг-
налом. Усиленный рабочий сигнал на заданной высоте
вызывает срабатывание взрывателя.
Передатчик / и приемник 2 оптического взрывателя
(рис. 225) установлены в пластмассовой головке взры-
вателя, в нижней части которой смонтирован генера-
тор 3 переменного тока такого же типа, как и генера-
тор радиовзрывателя. Ротор генератора -вращает тур-
бинка 4, воздух к которой поступает через два окна па
головке взрывателя. Для отвода потока воздуха из
внутренней полости взрывателя на боковой стенке кор-
пуса имеются специальные отводные окна. На верхний
конец оси ротора насажен модулирующий диск 5. Уси-
литель низкой частоты, механизм дальнего взведения
и огневая цепь взрывателя собраны в стальном стака-
не 6. &ля предохранения объективов и окоп, через ко-
торые проходит воздух, от попадания грязи головка
взрывателя закрывается либо металлической крышкой,
либо пластмассовым колпаком. Крышка (колпак) сры-
вается специальным устройством после сбрасывания
бомбы с самолета.
Высота срабатывания оптических взрывателей со-
ставляет несколько метров.
349
§ 65. ОСНОВНЫЕ СВЕДЕНИЯ ПО ЭКСПЛУАТАЦИИ
АВИАБОМБ И ВЗРЫВАТЕЛЕЙ
Правильная и грамотная эксплуатация авиабомб и
взрывателей является одним из основных условий без-
аварийной работы строевых частей и безотказного дей-
ствия авиабомб при боевом применении. Основные пра-
вила, определяющие и регламентирующие эксплуатацию
бомб и взрывателей, изложены в различных наставле-
ниях, руководствах, инструкциях и указаниях.
Эксплуатация авиабомб и взрывателей включает
следующие виды работ:
— организацию хранения и сбережения авиабомб и
взрывателей на аэродромах и складах авиационно-тех-
нических частей;
— подготовку авиабомб и взрывателей к боевому
применению;
— • снятие бомб с самолета и расснаряжение их от
взрывателей при иесостоявшемся вылете самолета или
возвращении его на аэродром с несброшенными бом-
бами;
— уничтожение неисправных или отказавших в дей-
ствии авиабомб и взрывателей;
— ведение технической документации.
Авиабомбы и взрыватели хранятся и транспорти-
руются в ^специальной укупорке. Для авиабомб приме-
няются три типа укупорки:
— ящичного типа (для авиабомб, снаряжение кото-
рых требует герметичности хранения, например для
САБ);
— цилиндрическая решетчатая (для авиабомб ка-
либром 50 кг и выше, допускающих перекатывание);
— укупорка-сани (для авиабомб калибром 5000 кг
и выше).
Взрыватели хранятся в герметической укупорке —
металлических коробках (по нескольку взрывателей
в одной укупорке). Коробки со взрывателями уклады-
ваются в деревянные ящики, в которые помещаются
также ножи для вскрытия коробки и приспособления,
необходимые для подготовки взрывателей к боевому
применению (ключ для ввертывания взрывателей в оч-
ко бомб, ключ для установки времени действия
и т. п.).
350
В строевых частях ВВС в мирноё время па аэродро-
ме хранится некоторый запас авиабомб. Для его
хранения на аэродроме оборудуются специальные пло-
щадки, укрытия или навесы. Бомбы хранятся в укупор-
ке отдельными штабелями для каждого самолета. Бом-
бы на открытой площадке укрываются брезентом или
специальными щитами. Хранить авиабомбы неукрыты-
ми запрещается. Для предохранения от коррозии под-
весные ушки и резьба под взрыватель смазываются пу-
шечной смазкой.
Взрыватели для авиабомб хранятся в гермоукупорке
в специальных кладовых или землянках авиационно-тех-
нической части. Совместное хранение взрывателей в од-
ном хранилище с другим имуществом не разрешается.
Взрыватели, направленные на хранение во вскрытой
гермоукупорке, должны быть заменены до истечения
установленного срока.
В период хранения авиабомбы подвергаются перио-
дическому осмотру. При осмотре проверяются:
— состояние укупорки;
— состояние корпусов бомб (на корпусе не должно
быть ржавчины, трещин, глубоких вмятин и других де-
фектов);
— состояние подвесных ушков (на ушках не должно
быть трещин, изломов и других повреждений, умень-
шающих прочность подвесной системы);
— прочность крепления и исправность стабилиза-
тора;
— отсутствие течи снаряжения;
— состояние резьбы под взрыватели, наличие и
исправность пробок в запальных стаканах и дополни-
тельных детонаторов.
В условиях строевой части разрешаются сле-
дующие работы по ремонту авиабомб:
— удаление следов ржавчины и подкраска отдель-
ных мест корпуса бомб и стабилизатора;
— смена смазки подвесных ушков и резьбы под
взрыватели;
— устранение незначительной деформации перьев
стабилизатора;
— замена отдельных неисправных детален бомб
(пробок, переходных втулок);
— обновление маркировки бомб.
351
Авиабомбы для подвески на самолет доставляются
авиационно-технической частью в укупорке и в ком-
плекте со взрывателями. После вскрытия укупорки по
маркировке, нанесенной на корпусе бомбы, необходимо
убедиться в том, что бомба соответствует заданию на
бомбометание. Маркировка бомбы отражает условными
знаками (буквами, цифрами, цветными полосами) ее
тип, калибр, номер завода-изготовителя, номер партии
бомбы, год изготовления, рецептуру снаряжения, вели-
чину характеристического времени. Для быстрого опре-
деления типа бомбы на цилиндрической части ее кор-
пуса, около головки, наносятся цветные кольцевые по-
лосы. Тип бомбы определяется по цвету и количеству
полос. Например, зажигательные бомбы маркируются
одной красной полосой, светящие — одной белой поло-
сой, фотографические — двумя белыми полосами. Цвет-
ные полосы не наносятся на фугасные, осколочные и
практические бомбы.
В процессе подготовки бомбы к применению необ-
ходимо очистить подвесные ушки от смазки и наруж-
ным осмотром убедиться в исправности ее корпуса, под-
весных ушков, стабилизатора, резьбы под взрыватели,
в наличии дополнительных детонаторов в запальных
стаканах. При обнаружении дефектов, которые могут
повлиять на нормальное действие и безопасность при-
менения, бомба к подвеске не допускается и сдается
в авиационно-техническую часть для ремонта или унич-
тожения.
Подготовка взрывателей производится в специально
отведенных местах, удаленных не менее чем на 50 м от
самолетов, боеприпасов и мест расположения личного
состава. Места подготовки взрывателей обозначаются
красными флажками днем и фонарями ночью. После
извлечения из укупорки взрыватели осматриваются. При
осмотре взрывателей проверяются наличие предохрани-
телей (чек, колпаков, винтов), исправность резьбы, от-
сутствие на корпусе вмятин, забоин, коррозии. Произ-
водить какой-либо ремонт взрывателей запрещается.
Неисправные взрыватели подлежат уничтожению. Не
допускаются также к применению взрыватели, хранив-
шиеся в негерметической укупорке более установлен-
ного срока.
Подвеска авиабомб на самолет и снаряжение их
352
взрывателями производятся в порядке, определяемом
Инструкцией по эксплуатации вооружения само. ieia и
руководствами по подготовке и применению авиабомб
и взрывателей. Эти же документы определяют порядок
расснаряжения и снятия авиабомб с самолета в случае
несостоявшегося вылета или возвращения самолета с
несброшенными авиабомбами.
Безопасность при обращении с авиабомбами и взры-
вателями может быть обеспечена только при условии
знания их устройства и строгого соблюдения установлен-
ного инструкциями порядка работы с ними. При рабо-
те с авиабомбами запрещается: ремонтировать бомбы
и укупорку на стоянках самолетов; бросать и ударять
бомбы друг о Друга, волочить и перекатывать их по
грунту и бетону; перевозить или переносить бомбы на-
валом; производить погрузку и транспортировку 'бомб
в неисправной укупорке; использовать бомбы не по пря-
мому назначению; произвольно изменять установленные
варианты подвески бомб на самолеты.
Перед подвеской бомб на самолете особенно тща-
тельно проверяются бомбовые лебедки, места их креп-
ления на самолете, состояние тросов, роликов и других
подвесных приспособлений. ’
Уничтожение неисправных авиабомб и взрывателей
должно проводиться в строгом соответствии с действую-
щими инструкциями и руководствами.
353
ПРИЛОЖЕНИЕ
СМАЗКИ И МАТЕРИАЛЫ, УПОТРЕБЛЯЕМЫЕ ПРИ РАБОТЕ
С АВИАЦИОННЫМ ВООРУЖЕНИЕМ
Материалы Назначение Темпера- тура засты- вания, °C
Смазки
Пушечная смазка 1. Длительное предохранение 26
ГОСТ 3005—51 от коррозии. 2. Консервация. 3. Смазка ухватов держате-
• лей и ушков бомб
Ружейная смазка 1. Предохранение от корро- —5
ГОСТ 3245—51 зии. 2. Как антифрикционная при температуре выше 0°С
Смазка ЦИАТИМ-201 Универсальная (для автома
ГОСТ 6267—52 тического оружия, шестерен, подшипников, трущихся по верхностей прицелов, ушков бомб, несущих рычагов держа- телей)
Веретенное масло ЛУ 1. Как антифрикционная и -45
ГОСТ 1642—50 (упо- предохранительная в смеси с
треблять только при от- ружейной смазкой при темпе-
сутствии другой смазки) ратуре от +15 до —20° С. 2. Для разжижения пушеч ной смазки. 3. Для промывки деталей, боуденовских оболочек
Масло вазелиновое 1. Смазка точных приборов —60
приборное (МВП) при низких температурах. 2. Наполнение масляно-пнев- матических амортизаторов
354
Ilpinio VKCHHf
Материалы
Назначение
TttMtiqM
t Vpn .ш । м
папин, i
Смазка HK-50
ГОСТ 1088—40
Масло «Автол-6»
Тавот
Технический вазелин
ГОСТ 782—53
Смазка № 9 ВТУ
(при переходе на смаз-
ку № 9 промывка дета-
лей не допускается)
Непригорающая до 140° С
(гайки и резьбьг на стволах
пушек)
Смазка осей кардана неко-
торых прицелов
Смазка деталей бомбовых
тележек, мишеней и другого
оборудования; кассет при под-
веске тяжелых бомб
Смазка внутренних поверх-
ностей пневмоцилиндров
Универсальная (для авиа-
ционного вооружения при тем-
пературе от —60 до + 60° С)
Ниже
—60
М а т е р и а jf ы для заправки и чистки
Этиловый спирт ректи- Чистка и дезактивация оп-
фикат тики и электроавтоматики (контакты, разъемы и т. п.)
Бензин Б-70 1. Чистка артиллерийских и бомбардировочных установок. 2. Промывка звеньев. 3. Дезактивация
Уайт-спирт ГОСТ 3134—52 Растворитель для удаления смазки и грязи с деталей авиационного- вооружения
Керосин Т-1 1. Промывка металлических деталей, удаление смазки п ржавчины. 2. Дезактивация. 3. Заправка гидротормозов авиационных пушек
Смесь АМГ-10 Заправка гидросистем Ниже —60
Цезерин-80 (Цезерин—25%, мас- ло МВП —75%) Для составления замазки при герметизации мест соеди- нения крышек прицелов с кор- пусом
355
ОГЛАВЛЕНИЕ
Стр
Введение .............................................. 3
ЧАСТЬ ПЕРВАЯ
Артиллерийское вооружение самолетов
Глава I. Авиационные пушки и пулеметы..................... 7
§ 1. Общие сведения ........................... . —
§ 2. Принципы действия авиационного оруХия . . . . 12
§ 3. Устройство автоматического оружия . . . . 17
§ 4. Общие сведения по эксплуатации оружия 22
Глава II. Боеприпасы артиллерийского авиационного
оружия.................................................... 25
§ 5. Устройство боеприпасов авиационного оружия —
§ 6. Взрыватели.................................... 31
§ 7. Общие сведения по эксплуатации боеприпасов 40
Глава Ill. Авиационные артиллерийские установки ... 43
•§ 8. Неподвижные установки.......................... —
§ 9 Общие сведения о подвижных установках ... 55
§ 10. Установка с электрическим следящим приводом 62
§ 11. Установка с электрогидравлическим следящим
приводом . . . 78
§ 12. Общие сведения по эксплуатации установок 91
Глава IV. Авиационные стрелковые прицелы для стрельбы
с подвижных артиллерийских установок...................... 96
§ 13. Задача прицеливания при стрельбе с самолета н
ее особенности ...................................... —
§ 14. Определение направления оси подвижной пушки
и визирной линии относительно самолета . 99
§ 15. Баллистика снаряда при стрельбе с самолета . . 101
§ 16. Гироскоп и его свойства................. . 105
§ 17. Особенности баллистики снаряда при стрельбе
под углом к направлению полета самолета 111
356
1 tr
§ 18 Гипотеза о движении цели и выражение скор™ tit
пели чсре< измеряемые параметры ... Ill
§ 19. Решение зад шп прицеливания .... . I Г>
§ 20, Функциональная схема (блок-схема) прицелыиш
системы . ...................... II
§ 21. Оптический визир и оптический дальномер 1'1
§ 22. Выполнение математических действий 1.9
§ 23. Решающие цепи . . .............. II/
§ 24. Точность стрельбы и порядок прицеливания . 11'*
Глава V. Стрелковые прицелы самолетов-истребителей . 141
§ 25. Решение задачи прицеливания при стрельбе с
истребителей .....................................
§ 26. Особенность стрельбы из пушек по наземным
целям ............................................. 1.11
§ 27. Особенность решения задачи прицеливания при
стрельбе неуправляемыми ракетами.................. 1М
§ 28. Особенности решения задачи прицеливания при
стрельбе управляемыми ракетами ................... 1.
§ 29. Возможные принципиальные схемы устройства
стрелковых прицелов истребителей .... 1<И)
§ 30. Основы устройства АСП....................... 17.1
§ 31. Характеристики точности воздушной стрельбы 192
Часть вторая
Бомбардировочное вооружение самолетов
Глава VI. Бомбардировочные установки ................... 199
§ 32 Держатели ..................................... —
§ 33. Механизмы управления створками бомбовых от-
секов ............................................. 211
§ 34. Система управления бомбардировочной установки 213
§ 35 Механизмы загрузки самолета боеприпасами . 220
§ 36. Общие сведения по эксплуатации бомбардиро-
вочных установок .................................. 223
Глава VII. Основы прицеливания при бомбометании . . 225
§ 37. Задача прицеливания.........................
§ 38 Вычисление требуемых координат .............. 228
§ 39 Прицельная схема ............................ 235
§ 40. Формулы для вычисления требуемых координат
цели.......................................... 236
§ 41. Определение фактических координат цели . 238
§ 42. Счисление координат ........ . . . . 211
§ 43. Измерение путевой скорости . ............. . 217
§ 44. Выполнение прицеливания...................... 249
§ 45. Основные понятия о бомбометании с негорнзон-
тального полета ................................... 251
357
Стр.
Глава VIII. Прицелы для бомбометания с горизонталь-
ного полета . ............ 256
§ 46. Общие сведения................................ —
§ 47. Определение фактических координат цели 258
§ 48. Связь оптической и радиолокационной визирных
систем............................... 260
§ 49. Управление визирными системами . . . . 262
§ 50. Стабилизация систем отсчета................. 265
§ 51. Определение и ввод исходных данных для вы-
числения требуемых координат цели ................ 266
§ 52. Вычисление требуемых координат . . 273
§ 53. Выполнение прицеливания 284
§ 54. Гировертикаль............................... 287
§ 55. Стабилизатор курса.......................... 288
Глава IX. Авиационные бомбы ... ....... . 291
§ 56. Назначение, классификация н основные характе-
ристики авиабомб........................... . . —
§ 57. Устройство типовой авиабомбы . 293
§ 58. Взрывчатые вещества...................... . 298
§ 59. Авиабомбы основного назначения 302
§ 60. Авиабомбы специального и вспомогательного на-
значения ........................................ 315
Глава X. Взрыватели авиабомб............................ 321
§ 61. Назначение и классификация взрывателей ... —
§ 62. Взрыватели ударного действия................ 323
§ 63. Взрыватели дистанционного действия . . . 338
§ 64. Неконтактные взрыватели ... 342
§ 65. Основные сведения по эксплуатации авиабомб и
взрывателей...................................... 350
Приложение:
Смазки н материалы, употребляемые при работе
с авиационным вооружением....................... 354
358
УЧЕБНИК МЕХАНИКА
ВОЕННО-ВОЗДУШНЫХ СИЛ
Под наблюдением редактора
полковника Медведева И. М
Технический редактор Коновалова Е. К.
Корректор Алексеева О. М.
Сдано в набор 18.8.67
Подписано к печати 21.3.68 г.
Г-5712.1
Формат бумаги 84Х108’/з2 — п. л. =
18,45 уСЛ. п, Ле 17,419 уч.-изд. л.
Изд. № ^/134 Зак. Кг 320
Продаже не подлежит
Ордена Трудового Красного Знамени
Военное издательство
Министерств а обороны СССР
Москва. К-160
2-я типография Воениздата
Ленинград, Д-65, Дворцовая, пл., 10